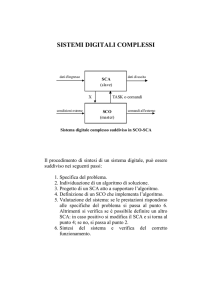
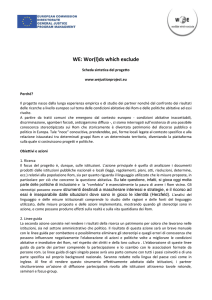
SISTEMI DIGITALI COMPLESSI
dati d'ingresso
X
condizioni esterne
dati di uscita
SCA
(slave)
TASK o comandi
SCO
(master)
comandi all'esterno
Sistema digitale complesso suddiviso in SCO-SCA
Il procedimento di sintesi di un sistema digitale, può essere
suddiviso nei seguenti passi:
1. Specifica del problema.
2. Individuazione di un algoritmo di soluzione.
3. Progetto di un SCA atto a supportare l’algoritmo.
4. Definizione di un SCO che implementa l’algoritmo.
5. Valutazione del sistema: se le prestazioni rispondono
alle specifiche del problema si passa al punto 6.
Altrimenti si verifica se è possibile definire un altro
SCA: in caso positivo si modifica il SCA e si torna al
punto 4; se no, si passa al punto 2.
6. Sintesi del sistema e verifica del corretto
funzionamento.
Sottosistema di Calcolo (SCA)
Registri, segnali e operazioni
D
Q
CK
EN
Cella di un registro
Un registro viene indicato con R, il suo contenuto con (R).
an-1
a0
b n-1
b0
A
B
Trasferimento dati tra due registri
en
ck
Operazioni tra dati contenuti in registri
OR :
(A) (B) = Y
somma logica bit a bit
esempio:
(0110) (1100) = 1110
AND :
(A) (B) = Y
prodotto logico bit a bit
esempio:
(0110) (1100) = 0100
NOT A:
(A) = Y
complementazione dei bit
esempio:
(0110) = 1001
EXOR : (A) (B) = Y
or esclusivo bit a bit
esempio:
(0110) (1100) = 1010
ADD :
(A) + (B) = Y
somma aritmetica
esempio:
(0110) + (1100) = 0010
SUB :
(A) - (B) = Y
sottrazione
esempio:
(0110) - (1100) = 1010
SR A, k:
shift right (scalamento a destra) di k posizioni
ai ai-k
i = n-1, ..., k
0 ah
h = n-1, ..., k
SL A, k:
ai ai+k
0 ah
shift left (scalamento a sinistra) di k posizioni
i = 0, 1, ..., n-k
h = 0, 1, ..., n-k
RR A, k:
rotate right (rotazione a destra) di k posizioni
ai ai-k
i = n-1, ..., k
ah an-k+h
h =0, 1,...., k-1
RL A, k:
rotate left (rotazione a sinistra) di k posizioni
ai a(i+k)mod n
i = 0, 1, ..., n
INC A, k:
(A) + k A
DEC A, k:
(A) - k A
EXCH A, B: (B) A
(A) B
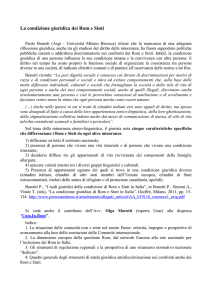
Interconnessione registri-circuiti di calcolo
R1
R2
MUX
MUX
R3
R4
MUX
A
MUX
S
MUX
L
Esempio di interconnessione tra registri e circuiti di calcolo
dall'esterno
MUX
MUX
R1
MUX
R2
MUX
MUX
A
MUX
R3
MUX
R4
MUX
S
Interconnessione tra registri e circuiti di calcolo
MUX
L
Wt1
B1
B1
B2
B2
...
Wt2
Bn
Bn
TEMP2
TEMP1
R1
R2
W1
...
Rn
W2
ALU
shif ter
B
B
Wn
BA
SR
singola linea
linee multiple
Interconnessione tra registri e circuiti di calcolo tramite bus
BS
R0
AND
AND
R1
.
.
.
.
.
.
decoder
AND
AND
R7
AND
AND
RM
W
M
Organizzazione vettoriale dei registri
ld
R1
op
d
e
c address
o
d
e
r
R2
R3
R4
en
ld
ALU
op
en
S
TEMP
TEMP
ld
Interconnessione a bus tra registri e circuiti di calcolo
Esempio di interconnessione con tre bus
Sottosistema di Controllo (SCO)
La microprogrammazione
X
Z
Y
Y'
CK
Rappresentazione Algorithm State Machine
}
Implementazione di e tramite ROM
= microprogrammazione
Modello di Mealy
s
i1
case
im
T1
Tm
d1
dm
Modulo elementare della rappresentazione ASM per macchine di tipo
Mealy
La corrispondente microistruzione ha un formato del tipo:
i : C1(T1,i1), C2(T2,i2), . . . , Cm(Tm,im)
dove
C1, C2, . . . , Cm (m 2k , k = n) sono le condizioni derivanti
dalle variabili di decisione x1, x2, . . . , xn;
T1, T2,..., Tm sono le corrispondenti azioni da effettuare;
i1, i2,...,im le microistruzioni successive a i.
X
Z
Y
Y'
CK
Modello strutturale standard
SS
TASK
Struttura della parola di ROM
Se
- n è il numero delle variabili di ingresso
- m è il numero delle variabili di stato
allora
numero di parole = 2n+m
p.e., se
- n =20
-m=4
allora
numero di parole = 224
(16 Mega)
ECCESSIVO!!!!!
registro SEL
X
circuito
di
selezione
ck
R
X'
SEL
TASK
ROM
Y' (SS)
R
ck
Y (stato attuale)
registro di stato
Struttura del SCO nel caso di modello di Mealy
SEL
SS
TASK
Struttura della parola di ROM nel caso di modello di Mealy con
selezione
X4
X3
X2
X1
X2'
X1'
Esempio di circuito di mascheramento non codificato
Modello di Moore
s/T
case
i1
d1 / T1
im
dm / Tm
Modulo elementare della rappresentazione ASM per macchine di tipo
Moore
La corrispondente microistruzione ha un formato del tipo:
i : Ti; C1(i1), C2(i2),..., Cm(im)
dove
C1, C2,..., Cm (m 2k , k = n) sono le condizioni derivanti
dalle variabili di decisione x1,..., xn;
Ti è l’azione da effettuare;
i1,.., im le microistruzioni successive a i.
X
Y’
Y
ck
Task
Modello strutturale di Moore standard
SS
Struttura della parola di ROM (che implementa la )
TASK
Struttura della parola di ROM (che implementa la )
Se
- n è il numero delle variabili di ingresso
- m è il numero delle variabili di stato
allora
numero delle righe della prima ROM (che impl. la ) = 2n+m
p.e., se
- n =20
-m=4
allora
numero delle righe = 224
(16 Mega)
ECCESSIVO!!!!!
Soluzione che permette l’uso di una unica ROM
TASK
ROM
SS1
SS2 . . . . . . SSm
multiplexer
'
X
Y'
ck
R
Y
Dimensione della parola della ROM ancora eccessivo
Infatti
numero delle righe = 2m
dove ogni riga ha una dimensione pari a
m 2n + k
p.e., se
- n =20
- m=4
- k = 10
allora
dimensione della parola di ROM = 220
Mega)
+10 (1
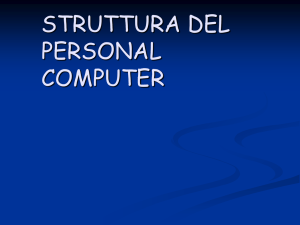
Soluzione che riduce le dimensioni della ROM
TASK
ROM
SEL
SS1
SS2 . . . . . . SS m
multiplexer
X'
circuito di
selezione
X
Y'
ck
R
Y
Struttura del SCO nel caso di modello di Moore con circuito di
selezione
SS1
SS2
..........
SSm
SEL
TASK
Parola di ROM nel caso di modello di Moore con circuito di
selezione
Dove m questa volta è pari alla cardinalità delle variabili
selezionate X’, normalmente 1 o 2.
Controllo per strutture Pipeline.
TASK1
X1
TASK2
TASKN
X2
X3
X
Y
N
ck
Sistemi di calcolo a task fisso nel tempo
TASK1 (KT) TASK2 ((K-1)T)
X1
X2
X3
TASKN (K-N+1)T)
X
N
ck
Sistemi di calcolo a task variabile nel tempo
Y
ck
X
X
X
1
TASK1-1
TASK1-2 TASK1-3
2
TASK2-1 TASK2-2
3
TASK3-1
Xj
X
N
Y
Temporizzazione di una catena pipeline
TASK1(K)
TASK1(K-1)
TASK2(K)
TASK2(K-1)
TASK3(K)
TASK3(K-1)
TASK2(K-2)
SCO
TASK3(K-2)
TASK3(K-3)
CK
Architettura SCO per generare TASK sfasati nel tempo
Sistemi con molti microprogrammi
stato iniziale
sequenza
comune
OPCODE1
OPCODEN
OPCODE2
microprg.
1
microprg.
2
microprg.
N
Diagramma di flusso con più microprogrammi
LOAD
base
RESET
ROM
sel
spostamento
OPCODE
TASK
SEL
MUX
ck
X
Schema di SCO con molti microprogrammi (modello di Mealy)
RESET
base
LOAD
OP CODE
TASK
spostamento
ROM
SEL
SS1
SS2 . . . . . SSm
ck
multiplexer
X'
circuito di
selezione
X
Y'
Schema di SCO con molti microprogrammi (modello di Moore)
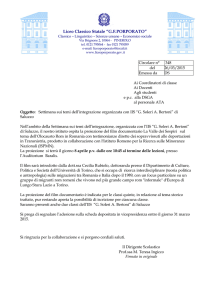
Comunicazione tra due sistemi digitali
UTx
URx
RDY1
Dato pronto
RDY2
FF1
FF2
ck1
RRx
Len2
RTx
Len1
ck2
ck1
ack1
ck2
ack2
FF3
ck1
Dato letto
FF4
ck2
Sincronizzazione di due unità in comunicazione
UTx
1: datoRTx, 1FF1;
2: if ack1=0, then vai a 2;
3: 0FF1;
4: if ack1=1, then vai a 4;
5: i+1i;
6: if iN, vai a 1
URx
1: 0FF4;
2: if RDY2=0, then vai a 2;
3: RTxRRx, 1FF4;
4: if RDY2=1, vai a 4 ;
5: i+1i;
6: if iN, vai a 1
Sequenze di microistruzioni eseguite da UTx e URx durante il
protocollo di comunicazione
1 d1ato
ACK =1
1
SI
2 0
i+1
i=N
SI
0
FF4
2 RTx
RRx
FF4
1
NO
i
NO
RDY=0
2
SI
3
NO
NO
RDY=1
2
SI
NO
FF1
ACK=0
1
SI
3
1
RTx
FF1
i+1
i=N
SI
i
NO
UTx
ack1
D
FF1
URx
Q
ck1
S
Q
sem
R
D
ck2
RDY2
FF2
Len2
RRx
RTx
Len1
ck2
ck1
Sincronizzazione tra due unità in comunicazione mediante flip-flop di
semaforo
1 Attesa sul sem
1 dato
RTx
Set sem
NO
RDY=1
2
SI
2 Attesa sul sem
ACK=0
1
SI
3
i+1
i=N
SI
2 RTx
RRx
Reset sem
NO
i
3
NO
i+1
i=N
SI
i
NO
Sequenze di microistruzioni eseguite da UTx e URx durante il
protocollo di comunicazione
UTx
1: datoRTx, set sem;
2: if ack1=0 vai a 2;
3: i+1i;
4: if iN, vai a 1;
URx
1: if RDY2=0, vai a 1;
2: RTxRRx, reset sem;
3: i+1i;
4: if iN, vai a 1;