Guida automatica di un velivolo in
condizioni di volo avverso
Obiettivo: Volo a bassa quota, Pianificazione ed inseguimento di
traiettoria.
Campi di impiego: Salvataggio superstiti, Missioni militari.
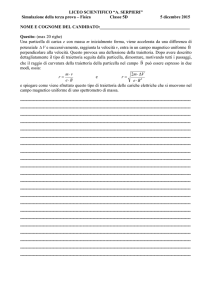
LOW-LEVEL
CONTOUR
NOE
L O W -L E V E L
CONTOUR
NOE
Figura 1: Le tre modalità di volo TF
Il volo a bassa quota è definito Terrain Following (TF)
Candidato: P. Lonardo
Low level
TF
Contour
NOE
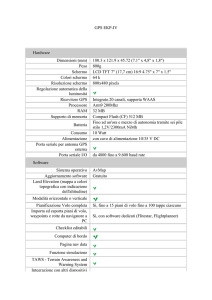
Far-Field
Mid-Field (TF/TA)
Near-Field (OA)
Figura 2: Sotto-problemi del volo TF
Far-Field: Individuazione off-line di una traiettoria grossolana;
Waypoints della missione.
Mid-Field: Individuazione on-line della traiettoria effettiva nell’intorno
del segmento congiungente due distinti waypoints.
Near-Field: Elaborazione dati provenienti dai sensori di bordo per
eventuali variazioni alla traiettoria effettiva.
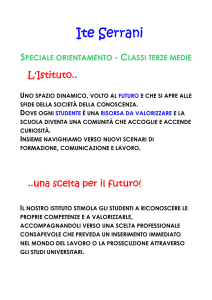
VIDEO
CAMERE
DATI
DI
VOLO
OSTACOLI
IMMAGINI VIDEO
STATO DEL VELIVOLO
RAGGIO VISIVO
RICEVITORI
TELEMETRICI
P UNTATORE
LASER
Figura 3: Rilevamento dati per la generazione della traiettoria di Near-Field
Candidato: P. Lonardo
APPROCCIO AL FAR-FIELD
Suddivisione della mappa orografica in blocchi ed individuazione del costo
stimato da ogni spigolo degli stessi fino al punto di destinazione del velivolo
Sulla base dei costi stimati individuare i waypoints caratterizzanti la
traiettoria ottima grossolana
APPROCCIO AL MID-FIELD – DYNAPATH
Individuazione del cammino nominale (segmento congiungente due waypoints)
Definizione di un patch suddiviso in tante celle
Generazione e potatura iterativa degli alberi di discretizzazione del volo del
velivolo sulla base delle equazioni della dinamica dello stesso
Individuazione iterativa, alla fine di ogni livello di alberi, del miglior nodo per
ogni cella e generazione di un nuovo albero a partire dallo stesso
Dopo N livelli di alberi (36) individuare il miglior nodo in assoluto e
ricavare i primi “m” istanti di discretizzazione del volo del velivolo
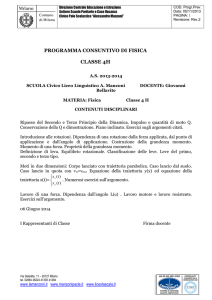
VISTA ALTO -BASSO
TRAIETTORIA TF/TA
CALCOLATA
CURVE DI LIVELLO
CAMMINO NOMINALE
CELLA i
MISSION
WAYPOINT
DATI
PROVENIANTI
DAI S ENSORI
PATCH:
ZONA PER IL CALCOLO
DELLA TRAIETTORIA
DATI MAPPA
TERRENO
TF/TA
TRAIETTORIA TF/TA
Hi
QUOTA MINIMA
CELLA i
Figura 4: Ottimizzazione su patch corrente
Candidato: P. Lonardo
Figura 5: Struttura ad albero
Un esempio di simulazione per Dynapath
Figura 6: MF su FF Peaks Scal. e Trasp.: Cella=4-Sor=21-Svol=6-w=0.05-V=50m/s
Figura 7:MF su FF Peaks Scal. e Trasp.: Cella=4-Sor=21-Svol=6-w=0.05-V=50m/s 3D
Candidato: P. Lonardo
UN ALTRO APPROCCIO AL MID-FIELD – ALGORITMO IBRIDO
Crescita iterativa di un solo albero di N livelli (8)
Stima per ogni nodo terminale dello stesso, del costo stimato fino alla
destinazione (mediante interpolazione della matrice dei costi stimati ricavata
per il Far-Field)
Sulla base del costo complessivo di ogni nodo scegliere il nodo radice per
l’iterazione successiva
P0
PF
Figura 8: Procedura iterativa
Candidato: P. Lonardo
Un esempio di simulazione per l’Algoritmo Ibrido
Figura 9:Peaks LH Conoscenza 1 J2 K 0.95 2D
Figura 10:Peaks LH Conoscenza 1 J2 K 0.95 3D
Candidato: P. Lonardo
Confronto dei tempi per le iterazioni necessarie
350
300
Secondi
250
Figura 62
Figura 64
Figura 66
Figura 68
Figura 70
200
150
100
50
8
r1
6
ite
r1
4
ite
r1
2
ite
r1
0
ite
r1
ite
r8
ite
r6
ite
r4
ite
r2
ite
ite
r0
0
Figura 11: Confronto tempi di calcolo per iterazioni delle figure dalla 62 alla 70
SVANTAGGI
VANTAGGI
DYNAPATH
Tutti i parametri possono essere modificati on-line.
Ampia visione dell’orizzonte.
Tempi di calcolo elevati per
ogni iterazione necessaria.
ALGORITMO IBRIDO
Tempi di calcolo bassi per ogni
iterazione.
Parametri importanti modificabili solo off-line.
Visione “corta” dell’orizzonte.
Figura 12: Tabella vantaggi – svantaggi per i due approcci risolutivi