C
CIIN
NE
EM
MA
AT
TIIC
CA
AD
DE
EL
LM
MO
OT
TO
OA
AR
RM
MO
ON
NIIC
CO
O
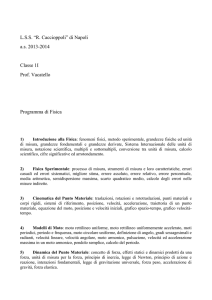
Si definisce ARMONICO il moto di un corpo che rispetto ad un’origine prefissata segua
la legge oraria
s = s0 sen(wt)
dove s è
s0
w
t
lo spostamento dall’origine
lo spostamento massimo dall’origine
la pulsazione del moto
il tempo
Il moto armonico è di fatto
un’oscillazione: un punto
animato da moto armonico
infatti si muove
continuamente “su e giù”
rispetto all’origine. Esempi
concreti possono essere i
punti della corda di una
chitarra o quelli della
superficie del mare che
oscillano a causa delle onde
che le percorrono
NB La figura rappresenta le
posizioni di P rispetto a O i
istanti successive. Quindi
non va interpretato come
uno spostamento del P lungo
la linea rossa!
Per comprendere meglio le caratteristiche del moto armonico e il significato della
legge oraria è necessario dedurre il moto armonico dal moto circolare.
Grazie alla deduzione del moto armonico da quello circolare è possibile anche
introdurre le grandezze che descrivono il moto armonico e dedurre le relazioni tra di
loro.
Pagina 1 di 5
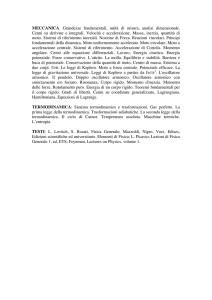
DEDUZIONE DEL MOTO ARMONICO DAL MOTO CIRCOLARE
Consideriamo un punto P che si muova di moto circolare uniforme lungo una
circonferenza.
P’
P
La sua proiezione P’ sull’asse delle ordinate si sposterà lungo l’asse con un moto
armonico:
1
2
3
4
5
6
7
8
Rappresentiamo con un grafico le posizioni del punto P’ in istanti successivi:
s
1
2
3
4
5
6
7
8
t
Pagina 2 di 5
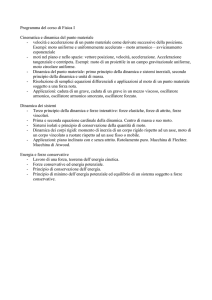
DEDUZIONE DELLA LEGGE ORARIA E DELLE RELAZIONI FRA LE ALTRE GRANDEZZE
SPOSTAMENTO
s0
s
P’
r
P
s
a
T/4
O
T/2
¾T
T
t
-r
Applicando la trigonometria al triangolo P’PO
s = r sena = s0 senwt
w è la velocità angolare del moto di P: w = a / t
a = wt
rispetto al moto armonico di P’ w è la PULSAZIONE
Il grafico s-t è una sinusoide, giustificata sia dall’equazione sia dalle
posizioni di P’
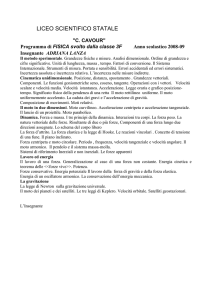
VELOCITÀ
v
P’
v0
H
P
v0
v
v0
a
T/4
O
T/2
¾T
T
t
-v0
Applicando la trigonometria al triangolo PHv0
v = v0 cosa = ws0 coswt
Il grafico v-t è una cosinusoide, giustificata sia dall’equazione sia dalle
proiezioni di v
Pagina 3 di 5
ACCELERAZIONE
P’
a
H
P
a0
a
a0
a
O
a0
T/4
T/2
¾T
T
t
-a0
Applicando la trigonometria al triangolo PHa0
a = - a0 sena = - w2s0 senwt = - w2 s
meno perché il verso dell’accelerazione, essendo rivolto verso il centro,
è opposto a quello dell’asse delle ordinate
Il grafico a-t è una sinusoide traslata, giustificata sia dall’equazione sia dalle
proiezioni di a
La relazione a = - w2 s può essere ricondotta alla forma
a=-ks
, che è
caratteristica del moto armonico. Ciò significa che se un moto qualsiasi
possiede questa caratteristica, allora può essere definito armonico.
Pagina 4 di 5
LE GRANDEZZE CHE CARATTERIZZANO IL MOTO ARMONICO
GRANDEZZE VETTORIALI
s
è
lo spostamento di P’
s0
lo spostamento
massimo
(coincide col raggio)
P’
P
a
v
l’accelerazione di P’
la velocità di P’
v0
a0
la velocità di P
l’accelerazione di P
O
VARIAZIONE DELLE GRANDEZZE VETTORIALI
Attenzione!
P si muove di moto circolare uniforme, quindi la sua velocità e accelerazione
rimangono costanti in valore assoluto, mentre variano in direzione e verso.
P’ invece si nuove di moto armonico: la sua velocità e accelerazione hanno direzione
costante (lungo l’asse y), ma il loro valore assoluto cambia continuamente.
In particolare:
la velocità si annulla in corrispondenza di s0 mentre assume il valore più alto (v0) a
s = 0. Il suo verso coincide con quello di s
l’accelerazione si annulla per s = 0 e raggiunge il valore massimo a s0, dove la
forza di richiamo che l’ha generata è maggiore (al punto da fermare il corpo e farlo
tornare indietro). Il verso è opposto allo spostamento (perché tende verso O).
[vedi anche formule e grafici nella deduzione del moto armonico dal moto circolare]
GRANDEZZE NON VETTORIALI
T
periodo
è il tempo impiegato da P’ per compiere un’oscillazione completa
(o da P per un giro di circonferenza)
w
pulsazione
corrisponde alla velocità angolare del moto di P
Pagina 5 di 5