Corso di Elettronica – ABACUS
I Filtri (rev 0.9)
I FILTRI
Contenuti
Introduzione
I sistemi di elaborazione visti come quadripoli
Funzione di Trasferimento
Unità logaritmiche e piani semilogaritmici
Definizione e classificazione dei filtri
Selettività ed ordine di un filtro
Filtri numerici
Esercizi
Introduzione
Si parlerà di filtri, ovvero di un particolare tipo di sistemi di elaborazione
(elettronico ma non necessariamente) capace di svolgere l’operazione di filtraggio di
un dato segnale informativo.
I sistemi di elaborazione come quadripoli
Quadripolo è un sistema elettrico dotato di due coppie di morsetti o poli,
identificati come morsetti di ingresso ( o bipolo di ingresso) e morsetti di uscita (o
bipolo di uscita).
Il segnale informativo (tensione o corrente) è applicato ai morsetti di ingresso
e l’esito della elaborazione è misurabile (tensione o corrente) ai morsetti di uscita.
ing. Massimo Denti 2005
1
ITIS “G. Galilei” Crema
Corso di Elettronica – ABACUS
I Filtri (rev 0.9)
Funzione di Trasferimento
Il quadripolo è una “scatola chiusa”: ovvero è il modo di vedere le cose detto
“black box”. Non mi preoccupo cioè di come un sistema sia implementato e mi
concentro sulla funzione che esso svolge.
La funzione di trasferimento è il mezzo per descrivere la funzione svolta da
un quadripolo.
La funzione di trasferimento è una funzione complessa ovvero definita su
dominio R (insieme dei numeri reali) e con condominio C (insieme dei numeri
complessi).
Come l’insieme R può essere messo in relazione biunivoca con i punti di una
retta, così l’insieme C può essere messo in corrispondenza con i punti di un piano. Un
numero complesso è quindi rappresentabile o in forma cartesiana (coppia ordinata x,y)
o in forma polare (modulo e angolo del vettore).
FdT ( )
La Funzione di trasferimento è un vettore
FdT ( ) FdT
( FdT ( ))
ing. Massimo Denti 2005
Un vettore è descritto dal suo modulo …
e dal suo angolo o dalla sua fase
2
ITIS “G. Galilei” Crema
Corso di Elettronica – ABACUS
I Filtri (rev 0.9)
Tenendo presente il presupposto di trattare con sistemi lineari per i quali vale
quindi il principio di sovrapposizione degli effetti, una definizione di funzione di
trasferimento è:
DEF La funzione di trasferimento esprime il legame fra segnale di ingresso e
segnale di uscita di un quadripolo ovvero come vengono elaborate le diverse
armoniche componenti il segnale di ingresso in funzione della loro frequenza.
Quindi se Si(t) è il segnale di ingresso, secondo Fourier vale:
Si (t ) A0 Ai sin( 2f i t i )
i 1
Facendo valere il principio di sovrapposizione degli effetti, ad ogni armonica di
ingresso deve corrispondere una armonica di uscita diversa in ampiezza e fase ma con
la stessa frequenza. Pertanto se So(t) è il segnale di uscita corrispondente a Si(t),
vale:
So(t ) B0 Bi sin( 2f i t i )
i 1
Valgono le seguenti relazioni importanti:
Bi
FdT ( )
Ai
( FdT ( )) i i
Valide per ogni indice i della sommatoria ovvero per ogni frequenza fi.
Studiare il comportamento di un quadripolo attraverso la sua funzione di
trasferimento (che ha per l’appunto come variabile indipendente la frequenza)
significa fare una analisi in frequenza o nel dominio delle frequenze. L’analisi nel
dominio delle frequenze è più semplice dell’analisi nel dominio del tempo.
ing. Massimo Denti 2005
3
ITIS “G. Galilei” Crema
Corso di Elettronica – ABACUS
I Filtri (rev 0.9)
Unità logaritmiche
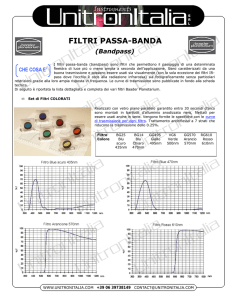
Per rappresentare graficamente valori con un ampia dinamica è possibile
utilizzare le unità logaritmiche che permettono di ottenere una compressione della
dinamica appunto.
Si immagini di dover rappresentare su di un asse cartesiano la variabile x che
ha un range di valori [1;106]. E’ possibile scegliere una unità di misura che permetta di
rappresentare graficamente sia i valori grandi che i valori piccoli nello spazio di un
foglio di carta? Se l’unità di misura minima corrispondesse al millimetro (ancora
facilmente tracciabile su carta) avrei bisogno di un asse lungo 1Km per arrivare a
rappresentare l’estremo superiore dell’intervallo. Viceversa con un foglio di un metro
dovrei far corrispondere l’unità di misura con il micron per poter rappresentare le
unità di x. Difficile per la maggior parte dei sistemi di stampa ottenere una
risoluzione di questo genere!
Si immagini ora di rappresentare sull’asse cartesiano non x ma il Log(x). Se x
ha la dinamica suddetta allora Log(x) avrà come dinamica l’intervallo [0;6],
decisamente più agevole da rappresentare.
Gli assi logaritmici si ottengono graduando l’asse secondo il logaritmo del
numero da rappresentare ma indicando sulla griglia il numero e non il logaritmo.
Come si osserva nell’esempio sopra, nello spazio di tre unità logaritmiche si
riescono a rappresentare mille unità lineari. Ovviamente si ottiene una gradazione
degli assi non lineare. In questo modo si definiscono anche le decadi ovvero intervalli
di una unità logaritmica corrispondenti ad un ordine di grandezza lineare.
ing. Massimo Denti 2005
4
ITIS “G. Galilei” Crema
Corso di Elettronica – ABACUS
I Filtri (rev 0.9)
Un modo differente per rispondere anche alle problematiche di cui sopra è
l’uso dei DECIBEL (dB) per rappresentare valori con un ampia dinamica.
Se A è il valore numerico di un guadagno o di una attenuazione (quindi è una
grandezza dimensionale) di tensione o di corrente allora A può essere calcolato in
decibel secondo le seguenti formule:
AdB 20Log ( A)
Vale ovviamente la formula inversa:
A 10
Ad b
20
Se invece A è il valore numerico di un guadagno di potenza, allora valgono
queste altre formule:
Ad b
10
dB
A 10
A 10 Log ( A)
Si noti che:
AxBxC AdB BdB CdB
Se A è il valore numerico di una tensione o di una corrente allora A,
rapportato al mV o al mA rispettivamente, può essere calcolato in decibel secondo le
seguenti formule:
A
AdB 20 Log ( 3 )
10
Se A è il valore numerico di una potenza allora A, rapportato al mW, può
essere calcolato in decibel secondo la seguente formula:
A
AdB 10 Log ( 3 )
10
ing. Massimo Denti 2005
5
ITIS “G. Galilei” Crema
Corso di Elettronica – ABACUS
I Filtri (rev 0.9)
Definizione e Classificazione dei Filtri
Filtro è un sistema capace di selezionare ovvero filtrare una porzione dello
spettro armonico del segnale di ingresso, producendo un segnale di uscita che ha uno
spettro armonico coincidente con la porzione di spettro di ingresso selezionata ovvero
privo della porzione di spettro di ingresso filtrata.
In tal modo potremo avere quattro tipologie di filtro a seconda della porzione
di spettro d’ingresso selezionata:
FILTRI
PASSA BASSO
LP
PASSA ALTO
HP
PASSA BANDA
BP
ELIMINA BANDA
NOTCH
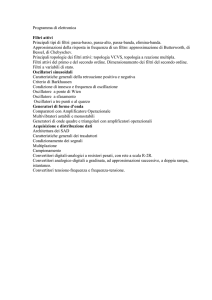
Possiamo descrivere le quattro tipologie attraverso una idealizzazione del
grafico del modulo della FdT:
ing. Massimo Denti 2005
6
ITIS “G. Galilei” Crema
Corso di Elettronica – ABACUS
I Filtri (rev 0.9)
Si definisce Frequenza di Taglio quel valore (o quei valori) di frequenza che
sono il confine tra la banda passante e la banda filtrata.
Si definisce Guadagno di centro Banda GCB il valore costante del |FdT| entro
la banda passante. E’ possibile classificare i filtri anche in questo modo:
FILTRI
PASSIVI
GCB ≤ 0 db
ing. Massimo Denti 2005
ATTIVI
GCB > 0 db
7
ITIS “G. Galilei” Crema
Corso di Elettronica – ABACUS
I Filtri (rev 0.9)
Selettività dei Filtri
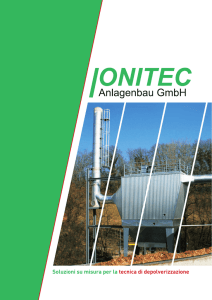
Il comportamento idealizzato descritto precedentemente non è ovviamente
possibile da ottenere. E’ possibile però ottenere un comportamento reale che
approssimi quello ideale, con una approssimazione che può essere ridotta aumentando
la selettività del filtro ma anche la sua complessità implementativa ed il suo costo.
Una descrizione approssimata (diagrammi a spezzate o diagrammi di Bode)
del comportamento reale delle quattro tipologie di filtro è riportata di seguito:
ing. Massimo Denti 2005
8
ITIS “G. Galilei” Crema
Corso di Elettronica – ABACUS
I Filtri (rev 0.9)
Come già accennato, i diagrammi di Bode sono ancora delle rappresentazioni
approssimate delle curve reali.
La selettività di un filtro è legata alla pendenza della curva nella transizione
dalla banda passante alla banda filtrata. Più è grande la pendenza (in valore assoluto)
maggiormente selettivo è il filtro. Più i tratti di curva suddetti sono verticali più ci si
avvicina alla idealità, con una separazione netta tra banda passante e banda filtrata.
Si osservi come viene definita la frequenza di taglio: quel valore di frequenza
al quale il |FdT| si è ridotto di 3db rispetto al valore di centro banda.
La selettività di un filtro si misura attraverso la pendenza dei tratti di curva
suddetti; la selettività di un filtro è detta anche ordine del filtro. Si possono quindi
classificare i filtri anche rispetto all’ordine:
ORDINE del FILTRO
1
2
3
4
…
n
ing. Massimo Denti 2005
PENDENZA della RETTA
±20 dB/dec
±40 dB/dec
±60 dB/dec
±80 dB/dec
…
±20n dB/dec
9
ITIS “G. Galilei” Crema
Corso di Elettronica – ABACUS
I Filtri (rev 0.9)
Filtri Numerici
Esercizi
ing. Massimo Denti 2005
10
ITIS “G. Galilei” Crema
Corso di Elettronica – ABACUS
ing. Massimo Denti 2005
I Filtri (rev 0.9)
11
ITIS “G. Galilei” Crema