ALTERNATORE PRINCIPIO Di FUNZIONAMNTO.
In un conduttore rettilineo di lunghezza l immerso in un campo magnetico con vettore
induzione costante B che si muova con velocità v nel piano perpendicolare alle linee
di induzione e con direzione perpendicolare al conduttore stesso, si induce una forza
elettromotrice e(t) (variabile nel tempo) data dalla:
Allo stesso tipo di fenomeno andremmo incontro se
facessimo ruotare una spira chiusa all'interno di un
campo magnetico costante. La legge di Faraday afferma
che la forza elettromotrice indotta in tal caso nella spira
è proporzionale alla variazione del flusso Φ magnetico
del campo 'abbracciato' dalla spira nell'unità di tempo.
La spira ruota in un campo magnetico
uniforme, con velocità angolare ω con
Il conduttore che taglia le linee del campo
magnetico ha lunghezza l.
Ma come possiamo valutare la velocità di attraversamento delle linee del campo in
questo caso?
Prima di tutto calcoliamo la velocità periferica del tratto l della spira, rispetto al campo
magnetico B:
ovviamente vp è un vettore di modulo (intensità) costante, ma la sua direzione e verso
dipendono dalla posizione del tratto l della spira rispetto al campo B.
Osservando l'immagine è facile dedurre che
La f.e.m. indotta sarà dunque
essa dipende dal tempo dato che
abbiamo posto per comodità
ovviamente V=cost. dato che ω=cost. e in
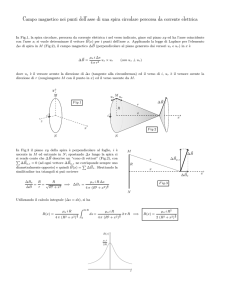
ragione di ciò, e dipende esclusivamente da t. La rappresentazione di e(t) in funzione
di θ=ωt e:
essa è riconducibile alla posizione del punto terminale di un segmento di lunghezza
costante V che mantiene un estremo, fisso nell'origine delle coordinate e ruota lungo il
perimetro di una circonferenza, con velocità angolare ω .
Da notare come il valore massimo del segnale elettrico e(t) sia V in corrispondenza di
90° mentre il minimo è -V in corrispondenza di 270°.
ovviamente essendo ω misurata in rad/sec occorre
abituarsi a valutare gli angoli indifferentemente in
radianti o in gradi sessagesimali.
In figura è riportata la corrispondenza fra gradi e radianti
per alcuni angoli principali.
In ogni caso per effettuare le conversioni si il rapporto:
per trovare i radianti partendo dai gradi
per trovare i gradi partendo dai radianti
FASE
La fase è una misura angolare che caratterizza la posizione del segmento V ad ogni
istante della sua rotazione, Particolare importanza assume il valore della fase iniziale
φ :la fase che caratterizza il vettore all'istante t=0.
esempio di sinusoide in
anticipo di fase di 45° rispetto
alla sinusoide originaria di fase
0: Vsin(ω t).
esempio di sinusoide in ritardo
di fase di 45° rispetto alla
sinusoide originaria di fase 0:
Vsin(ω t).
E' importante notare come sia
indifferente usare la funzione seno o
quella coseno per descrivere grandezze
di questo tipo, data l'esistenza della
relazione:
e di altre.
PERIODO E FREQUENZA
Il periodo di un'onda sinusoidale è il tempo impiegato dall'onda per compiere un
intero ciclo, l'onda è caratterizzata dal fatto che compie lo stesso ciclo in modo
ripetuto. Il ciclo di un'onda alternata si misura in secondi.
Un altro importante parametro è la frequenza che è il numero di cicli compiuti
nell'unità di tempo (in 1 secondo).
[Hertz] [Hz]
in figura la sinusoide di destra compie un numero di cicli doppio rispetto alla
sinusoide di sinistra: essa ha un periodo che è la metà della sinusoide di sinistra.
Importante è la relazione fra frequenza, periodo e pulsazione:
per le funzioni sinusoidali è rilevante anche il parametro:
valore efficace della funzione, con V ampiezza (valore massimo) dell'onda
si ricorda che il valore delle grandezze elettriche viene fornito sempre sotto forma di
valore efficace.
Più intuitiva è la nozione di valore
'picco a picco' di una sinusoide.
L'elaborazione delle grandezze alternate sinusoidali è facilitata dalla teoria
matematica dei numeri complessi.
FORMA SIMBOLICA
La grandezza elettrica, viene in questo caso
rappresentata sul piano dei numeri complessi
tramite un vettore V che ha il suo punto di
applicazione nell'origine degli assi.
Il vettore V può essere definito con le sue due
proiezioni sugli assi cartesiani, scrivendo:
dove j è l'operatore immaginario
a viene chiamata la parte reale di V,
mentre b è la parte immaginaria di V. Questa, viene detta forma binomiale del vettore
V.
Dobbiamo immaginare questa, come la posizione iniziale del vettore rotante,
all'istante t=0.
Una forma alternativa a quella binomiale, è la forma polare:
dove |V| è il modulo del vettore, cioè la sua lunghezza,θ è la fase iniziale del vettore
ed e=2.718.. è il numero di Neper.
La forma binomiale e quella polare sono legate dalle relazioni:
mentre (per la trigonometria)
Da queste considerazioni si deduce che possiamo definire una grandezza alternata
sinusoidale, attraverso almeno tre forme:
forma sinusoidale:
forma vettoriale binomiale:
forma vettoriale polare:
La forma binomiale risulta opportuna per la somma o la differenza fra vettori, la forma
polare risulta opportuna per la divisione e la moltiplicazione fra vettori.
CSD e IDG
È particolarmente importante mantenere la velocità del generatore costante in impianti
in cui i generatori funzionano in parallelo. In tal caso è assolutamente essenziale che la
velocità dei generatori sia mantenuta costante entro limiti estremamente piccoli,
attraverso una unità chiamata CSD (Costant Speed Drive).
Il sistema CSD completo consiste di un differenziale a ingranaggi assiali AGD (Axial
Gear Differential), la cui velocità d‟ uscita rispetto alla velocità di entrata è controllata
da un regolatore che controlla una pompa idraulica ad uscita variabile. La pompa
fornisce pressione idraulica ad un motore idraulico, che varia il rapporto della velocità
di ingresso e della velocità di uscita per AGD in modo da mantenere l’uscita ad un
valore costante, che deve corrispondere alla frequenza di 400 Hz per il generatore.
Un generatore con CSD è illustrato in figura
, dove si può notare la complessità dell‟ unità in questione per cui questa immagine
viene fornita solo a titolo di esempio. La maggior parte di questi dispositivi sono forniti
di un adattatore stacca/attacca veloce QAD (Quick Attach Detach), che permette la
sostituzione di un generatore con CSD in pochi minuti.
Per via delle grandi potenze necessarie, ma anche della vitale dipendenza dei velivoli
dall’impianto elettrico, l’ evoluzione tecnologica ha reso possibile l’eliminazione dei
CSD, con i loro svantaggi tra i quali il peso e il costo. Le soluzioni adottate sono state
concettualmente tre:
1) integrare in un unico componente in gruppo CSD + Generatore AC onde limitare
peso e complicazioni costruttive con l’adozione del Integrate Drive Generator ( IDG):
dispositivo costoso e complesso, ma capace di fornire grandi potenze con riduzione del
peso complessivo rispetto alla soluzione tradizionale;
2) eliminare il CSD tra Gear Box e Generatore sostituendoli con un nuovo tipo di
generatore chiamato Variable Speed Costant Frequenzy (VSCF ): un sistema integrato
di generatore che opera a giri variabili direttamente collegato alla Gearbox ed un
convertitore che fornisce come output corrente trifase 200 AC a frequenza 400Hz
stabilizzata;
3) abbandonare i sistemici distribuzione a frequenza fissa e prevedere, in sede di
progetto, campi di oscillazione di frequenza entro una banda anche ampia ( ex 370 –
800Hz). Questa scelta di generatori e distribuzione a frequenza variabile è ampiamente
usata nei nuovi velivoli civili quali A380, B787 ed il A400, velivolo cargo militare:
questa è oggi l’ultima frontiera della evoluzione tecnologica;
4) nel campo dei velivoli militari come F22 e F 35, si sta sviluppando una nuova
impostazione: generazione elettrica iniziale con potenti generatori che operano a 270
VDC; dal momento che alcuni impianti comunque necessitano di 115 VAC ed altri
28VDC debbono comunque essere previsti sistemi di conversione.