Alcuni aspetti della
teoria delle probabilità
generalizzate
Fabio Cuzzolin
NAVLAB - Laboratorio di visione e navigazione autonoma
Dipartimento di Ingegneria dell’Informazione
Università di Padova
Politecnico di Milano, 16 settembre 2002
Obiettivi della presentazione
introdurre la teoria dell’evidenza
presentare alcuni problemi di visione
approfondire gli sviluppi teorici stimolati
da questi problemi
accennare alle prospettive future
2
Parte I
La teoria dell’evidenza
Descrizioni dell’incertezza
proposte numerose teorie per estendere
o sostituire la probabilità classica:
possibilità, fuzzy sets, random sets, capacità monotone
teoria dell’evidenza (A. Dempster, G. Shafer)
belief functions
regola di Dempster
frames
4
Belief functions
generalizzano le classiche
probabilità finite
P A
p( )
A
s A
m( B)
B2
B A
normalizzazione
m( B) 1
B1
elementi focali
B
5
Assiomi
probabilità
2. p() 1
1. p() 0
additività: se A B allora p( A B) p( A) p( B)
belief functions
1. s() 0
2. s() 1
superadditività
s( A1 ... An ) s( Ai ) s ( Ai A j ) ... (1) n 1 s ( A1 ... An )
i
i j
6
Mappe multivalore
mappa uno-molti
Bel ( A) Ps (s) A
Q1, Q2 problemi di decisione a valori in S,T
P(s) probabilità su S
7
Regola di Dempster
sono combinate per mezzo della regola
di Dempster s, s ' s s '
m ( A )m ( B )
m( A)
Ai
AiBj=A
Bj
Ai B j A
1
1
i
2
j
m ( A )m ( B )
Ai B j
1
i
2
j
intersezione degli elementi
focali
8
Esempio di combinazione
a1
s1:
m({a1})=0.7, m({a1 ,a2})=0.3
a3
a2
a4
s2:
m()=0.1, m({a2 ,a3 ,a4})=0.9
s1 s2 :
m({a1})=0.19, m({a2})=0.73
m({a1 ,a2})=0.08
9
Origine di Dempster
P1:
s1
S
S1
S2
P:
(s1,s2)
P2:
1
2
T
1(s1)
2(s2)
S s1 , s2 S1 S2 1 s1 2 s2
s1 , s2 1 s1 2 s2
s2
P P1 P2
S
10
Tipi di belief functions
semplici: un solo elemento focale (+)
m(A)+m()=1
A
separabili: somma di b.f. semplici
Bayesiane: probabilità
m( A) 0 A 1
11
.0
Famiglie di frame
.1
.0
.1
.00 .01 .10 .11
0.00
.2
.3
.4
refining
0.09
0.49
raffinamento comune
0.90
0
0.25
0.5
0.75
0.99
esempio: una funzione y [0,1] è valutata
tramite tre misure quantizzate
1
12
Bayes vs Dempster
La ToE generalizza il formalismo
Bayesiano perché
le probabilità discrete sono una particolare
classe di belief functions
la regola di Bayes è un caso particolare
della regola di Dempster
prevede una rappresentazione
multidominio della evidenza disponibile
13
Parte II
Alcuni problemi di visione
Visione artificiale
scopo: riprodurre funzioni visive naturali
al calcolatore
diversi ambiti: riconoscimento, stima di
moto e scena, classificazione di immagini
due applicazioni:
object tracking
data association
15
Object tracking
problema: ricostruire la posa di un corpo
articolato a partire dalle immagini
CAMERA
T=0
qˆ tk Q
t=T
CORPO ARTICOLATO
16
Fusione di feature
dalle immagini si estraggono misure o
feature (es. colore, forma, intensità)
èsoluzione
utile integrare
più feature
naturale
nella per
ToEottenere
una stima robusta
spesso le feature non hanno relazione
analitica tra loro (es. colore e forma)
17
Modello evidenziale
1
2
n
raffinamenti
spazio dei parametri approssimato
(traiettoria campione)
spazi di feature
discretizzati
Q
Q
spazio dei parametri
ignoto
18
Discretizzazione
traiettoria campione
~
Q qtk , k 1,..., T
hidden Markov models
19
Algoritmo di tracking
alcune feature
sono estratte f ,...,
1
dall’immagine
le feature sono
f n tradotte in 1
belief functions
s ,..., s
queste belief
n functions sono ~
proiettate su Q
I (t )
sono combinate
tramite
Dempster
s è approssimata
p
da una
n
probabilità p
s s1 ... s
sˆ
si calcola una
stima puntuale
qˆ t p(q) q
qQˆ
20
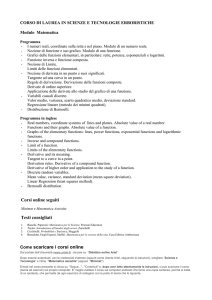
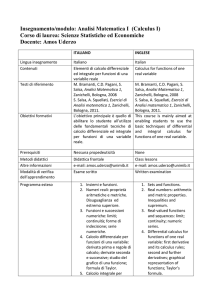
Inseguimento robot planare
traiettoria (verde) - stime (rosso)
PantoMouse (Lab.
Elettronica Industriale)
21
Data association
I(t)
I(t+1)
ricerca delle corrispondenze tra punti di due immagini
consecutive corrispondenti ad uno stesso punto 3D
metodo standard: JPDA
22
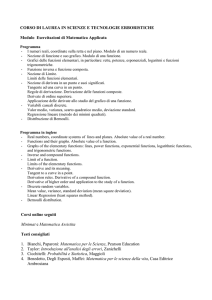
Body tracking
anca dx
ginocchio dx
anca sx
marcatore
ginocchio sx
applicazione: tracking di feature-points corrispondenti a
marcatori disposti su un corpo umano in movimento
23
Informazioni di forma
modello JPDA: target
indipendenti
Z
Z
modello di forma: link rigidi
Y
X
Y
fusione con Dempster
X
+robustezza: ff non soddisfano vincoli di forma
stima delle occlusioni
24
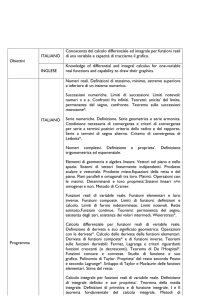
Esempio di tracking
tracking di un corpo umano: ambiguità quando il
clutter si trova alla stessa distanza del target
25
Parte III
Verso una teoria delle
probabilità generalizzate
Estendere la ToE
analisi algebrica
analisi geometrica
Teoria
dell’evidenza
analisi combinatoria
analisi probabilistica
analisi categoriale?
27
Geometria delle belief functions
Belief space
è lo spazio delle belief functions definibili
su un frame S s : 2 0,1
ad ogni sottoinsieme A
coordinata A-esima s(A)
ha la forma di un simplesso
S Cl ( PA , A )
29
Geometria globale di
regola
Dempster
e
chiusura
convessa
s Pdi
P
y
y
commutano
P
s Cl (s1 ,..., sn ) Cl (s s1 ,..., s sn )
s
s
sottospazi condizionati: futuro di s
S
s Px Px
s s t , t S Cl (s PA , A Cs )
P
esempio: frame binario ={x,y}
30
Geometria locale di
analisi puntuale
decomposizione in
termini di Bayes
fuochi di un
sottospazio
FA lim s (1 k ) PA
k
31
Approssimazioni
non esistono momenti (media, varianza)
problema: estrarre una stima puntuale
da una belief function s
criterio esterno
la approssimazione si comporta come s
quando viene combinata tramite Dempster
sC arg min
sC
s t s t
p
dt
t
32
Algebra dei frame
Indipendenza e conflitto
non sempre s1,…, sn sono combinabili
dei frame 1,…, n sono indipendenti se
1 ( A1 ) ... n ( An ) , Ai i
s1,…, sn qualsiasi sono combinabili
sono definite su frame indipendenti
34
1F
Reticolo dei frame
W
relazione d’ordine:
essere raffinamento
W
reticolo semimodulare
W
raffinamento minimo W = sup
coarsening massimo W = inf
35
Gram-Schmidt?
frame e spazi vettoriali sono reticoli
semimodulari ammettono indipendenza
pseudo Gram-Schmidt
1 ,..., n F
s1 ,..., sn
'1 ,..., 'm F
s '1 ,..., s 'm
nuovo insieme di b.f. sicuramente combinabili
36
Analisi combinatoria
Belief totale
generalizzazione della probabilità totale
vincolo a-priori
vincolo condizionale
38
Esistenza
soluzione candidata: sistema lineare nn Ax b
dove le colonne di A sono gli elementi focali di stot
scelta tra m colonne, in modo t.c. x abbia tutte
componenti positive
sostituzione di colonne tramite
e e e ei e j
i
j
39
Grafi di soluzioni
le soluzioni candidate formano un grafo
archi = trasformazioni lineari
40
Tra teoria e applicazione
OBJECT TRACKING
DATA ASSOCIATION
CONFLITTO
TRA MISURE
STIMA
PUNTUALE
VINCOLI
CONDIZIONATI
ANALISI
ALGEBRICA
ANALISI
GEOMETRICA
BELIEF TOTALE
la soluzione dei problemi stimola estensione e
approfondimento della teoria
41
Parte IV
Prospettive
Nuovi obiettivi...
analisi algebrica
analisi geometrica
Teoria
dell’evidenza
analisi combinatoria
analisi probabilistica
analisi categoriale?
43
Decomposizione canonica
unica decomposizione di s in b.f. semplici
s e1 ... en
s Py Py
ey
s
s Px Px
ex
soluzione usando la geometria convessa
44
Geometria dei fuzzy set
i fuzzy set sono una classe di belief functions
(misure di possibilità)
hanno la geometria di un complesso
simpliciale
problema della approssimazione
possibilistica
45
Indipendenza lineare
indipendenza su reticoli semimodulari
LI3
LI1
LI1
LI2
L semimodulare
LI2=LI3
L modulare
equivalenza tra indipendenza “interna”
ed “esterna”
46
Tracking di corpi rigidi
data association di punti appartenenti a un corpo rigido
m-1m
vecchie stime
Am-1
associazioni modello
- misure passate
nuove stime
Am
associazioni modello
- misure correnti
associazioni tra misure
passate e correnti
m-1m
Am-1
vincoli di moto
rigido
filtri di
Kalman
Am-1 ()
Am
= Am-1 m-1m
i vincoli di moto rigido sono descrivibili
come b.f. condizionate belief totale
47
Sviluppi della belief totale
completamento (caso generale, numero di
soluzioni, simmetrie)
relazioni con i sistemi positivi
geometria del problema nei sottospazi
condizionati
omologia dei grafi di soluzioni
interpretazione come matroidi
48
Processi generalizzati
serie di belief functions
limiti di somme di Dempster s1 … sn
processo associato ad una sequenza di
s1 ... sn ...
belief functions
approssimazione
pˆ 1
pˆ n
deve esistere una funzione misurabile su
49
Una ToE del continuo
la teoria è stata sviluppata solo per il
caso finito
esiste una estensione delle belief
functions: i random set
non esiste una estensione della regola di
Dempster
formalismo delle categorie?
50
…concludendo
la teoria dell’evidenza nasce da una critica
forte dell’impostazione Bayesiana
utile in problemi di sensor fusion o sotto
informazione incompleta
la soluzione dei problemi stimola
l’estensione del formalismo stesso
oggetti più complessi maggior ricchezza
teoria ancora giovane completamento
51