")
Guide d’onda (cont.)
Nella lezione precedente
Risolta l’equazione d’onda per Guida a Piatti piani
paralleli
Introdotta la guida rettangolare
A
b
Bx
y
z
a
Possiamo immaginare
almeno alcune delle soluzioni con un’argomentazione
molto semplice; chiaramente non supporta un modo TEM (1 solo cond.)
Potremmo vedere la guida d’onda rettangolare come una guida a piatti
piani paralleli, orientata lungo x, e chiusa su dei corto-circuiti
Chiaramente, a frequenza zero, i 2 punti A e B (posti per esempio sul
piano di simmetria) sono allo stesso potenziale: un’eventuale generatore
connesso tra A e B risulterebbe completamente cortocircuitato
Ma la guida a piatti piani paralleli supporta un modo TEM, cioè tipo linea di
trasmissione; sappiamo che con segnali tempovarianti, la linea può
produrre onde stazionarie, e che un corto circuito può addirittura
trasformarsi in un circuito aperto in presenza di una linea lunga un quarto
d’onda, ovvero se
/ 4 a / 2 2a f c / c / 2a 1 / 2a
A tale frequenza potremmo ben applicare un generatore tra A e B:
vedremo che tale frequenza è LA FREQUENZA DI TAGLIO DEL MODO
FONDAMENTALE di una guida
Chiaramente una condizione simile si ripete in virtù del
periodo della linea
Inoltre potremmo applicare lo stesso ragionamento in direzione
y: otterremmo un’altra frequenza di taglio, maggiore della
precedente se b<a; un valore standard è a=2b
Per ottenere il quadro esatto della situazione possiamo
risolvere l’equazione d’onda: partiamo dai TM
t E z kc E z 0
2
2
Ora in generale E dipenderà da x e da y, visto che la struttura
non è uniforme in nessuna delle direzioni.
Possiamo però sperare nella “separazione delle variabili”,
ovvero che sia possibile scrivere E come prodotto di una
funzione solo di x, diciamo X(x) ed una funzione solo di y Y(y)
E z ( x, y) X ( x)Y ( y)
Sostituendo nell’equazione d’onda otteniamo
X ' ' Y XY ' ' k c 2 XY
Dividendo per XY otteniamo
X '' Y ''
k c 2
X
Y
I due termini a sinistra sono uno solo funzione di x (e quindi
costanti per variazioni in y) e l’altro solo funzione di y:
possiamo porli separatamente uguali ad una costante
X ''
Y ''
2
k x ;
k y 2
X
Y
E chiaramente deve essere
k x 2 k y 2 kc 2
Entrambe hanno soluzioni armoniche
X A cosk x x Bsin k x x ; Y C cosk y y Dsin k y y
Imponendo le condizioni al contorno si ottiene
E z x 0, y 0 A 0
E z x, y 0 0 C 0
Ez x, y BDsink x xsin k y y
n
m
E z x a, y 0 k x
E z x, y b 0 k y
a
b
n ed m sono numeri naturali, eccetto 0: se uno dei due indici
diviene 0, Ez si annulla, ed il TM diverrebbe un TEM che
sappiamo non possibile
Costante di propagazione e, conseguentemente, impedenza
modale sono determinate da kc
2
k c n ,m k x k y
2
2
2
n m
a b
2
n, m
f c n, m
2
2
n m
2
a b
1
2
2
n m
a b
2
La frequenza di taglio del primo modo è quella con indici 1,1;
non sappiamo ancora però se esistono frequenze di taglio più
basse per i TE; il primo modo si definisce modo fondamentale
TE
Analogo, solo che ora risolveremo per Hz ottenendo
H z A cosk x x Bsin k x x C cosk y y Dsin k y y
Le condizioni al contorno vanno imposte sulle derivate
H z
n
x 0, a
H z
x
0
x 0, a
H z
n
y 0, b
H z
y
0
y 0, b
Da cui
Con gli stessi autovalori (modi degeneri)
H z BDcosk x xcos k y y
n
m
kx
,ky
a
b
Solo che ora n OPPURE m possono
essere z. Non contemporaneamente o
avremmo Hz uniforme (non dipende
da x e y)
Hz uniforme non sarebbe ammissibile, visto che il campo
magnetico tangenziale
Ht
2
t H z
kc
Finirebbe per essere nullo, e così il campo elettrico (che è solo
tangenziale), legato dall’impedenza modale al campo
magnetico. Tra l’altro n ed m=0 darebbero una costante di
propagazione coincidente con quella del TEM, impossibile
Se a>b il modo fondamentale è il TE10. Notate che l’indice 0,
indica che in y non ci sono variazioni
In tal caso i campi non nulli risultano solo Ey, Hx ed Hz
(provatelo), come nel caso della guida a piatti piani paralleli: del
resto in una della direzioni non vi è variazione, proprio come in
tale guida
In tal caso i campi risultano
H z B cos x
a
E la frequenza di taglio
fc
a
j a
Hx
Bsin x E y
Bsin x
a
a
1, 0
1
2
2
1
2a
a
…cioè quella ricavata in principio. Chiaramente il ragionamento
iniziale ci consentiva di determinare le frequenze di taglio di
modi che avevano uno degli indici 0, non quelli in cui si ha
contemporaneamente una variazione in x ed una in y
Noti i campi magnetici, conosciamo le correnti indotte sulle
pareti
J nH
Qualche “interpretazione”
Considerate per semplicità una guida a piatti piani paralleli:
sappiamo che
k 2 kc2 2 k x2 2
Consideriamo il TM: quando kx=0, =k e diviene il TEM; in
pratica l’onda si sta propagando parallelamente ai piatti con
costante di propagazione k
x
Et
k=uz
z
Hy
In generale però k non coinciderà con , ed il vettore d’onda
sarà inclinato
k
x
Et
z
kz
Hy
In tal caso Et avrà una componente lungo z (ecco che il TEM
diviene un TM)
Qualche “interpretazione”
L’onda si propaga per “rimbalzi” multipli; la velocità di fase,
inversamente proporzionale alla costante di propagazione
lungo z, può ben essere maggiore della velocità della luce
Al “taglio”, la componente lungo z della costante di
propagazione, , è nulla, e l’onda rimbalza, risuonando, tra le
due pareti metalliche. I “rimbalzi” si schiacciano poi verso l’asse
all’aumentare della frequenza (del resto si avvicina a k)
k=kxux
x
Et
z
Hy
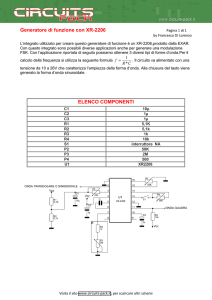
La forma di tali correnti è importante: se pratichiamo un’incisione sulla guida,
essa perturberà il modo più o meno in funzione delle linee di corrente
Un’applicazione JAVA scaricata dal sito www.falstad.com
(http://www.falstad.com/embox/guide.html) (courtesy of P. Falstad) vi consente di
familiarizzare con le forme dei campi e delle correnti dei diversi modi. Ecco i campi
magnetici
Correnti
Fessure invece non
trascurabili e che intercettino
linee di corrente irradiano: le
antenne a “slot”
Si capisce allora come la
fessura centrale sul piano
superiore nella linea
fessurata, se
sufficientemente sottile, poco
perturbi il modo
Relazioni di ortogonalità
I modi all’interno di una guida rettangolare sono ortogonali, ovvero il
prodotto scalare (opportunamente definito) tra componenti di campo
omologhe di due diversi modi è zero
i , j d i, j A2
Dove la d indica la delta di Kronecker
d i, j
1 if i j
0 if i j
rappresenta una delle componenti di campo (es. Ez o Hz) e la
costante A è legata all’ampiezza dei campi; rapportando ad A i campi
(normalizzazione), i modi risultano ortonormali
In realtà, con l’accortezza di modificare la definizione di prodotto
scalare qualora le soluzioni non possano essere scritte in termini di
modi TE o TM (ovvero modi “ibridi”), una relazione di ortogonalità
esiste sempre nel caso di onde guidate, anche se le dimostrazioni
risultano più complicate.
Incidentalmente: diremo che la struttura supporta modi “ibridi” qualora
un singolo modo TE o TM non è in grado di soddisfare tutte le
condizioni al contorno
Relazioni di ortogonalità: dimostrazione
Nel caso di guide rettangolari, a piatti piani paralleli e circolari, che non
hanno modi ibridi, la dimostrazione è semplice. Definiamo in particolare il
prodotto scalare come
i , j i j ds
S
Scriviamo l’equazione d’onda per ciascuno dei modi
2
2
2
2
t i kci i 0 t j kc j j 0
Premoltiplichiamo la prima per j e la seconda per i e sottraiamo
j t i i t j kc j kci i j
2
2
2
2
Integriamo a destra e sinistra sulla sezione della guida
2
2
2
2
ds
k
k
j t i i t j
cj
ci i j ds
S
S
Ora utilizziamo una delle identità che consentono di ridurre l’ordine
d’integrazione; usiamo la 2a identità di Green
2
2
j n i i n j ds kc j kci
C
ds
i j
S
Essendo n la normale al contorno C, che è il bordo della sezione S. Ora su
tale contorno o i campi o le loro derivate vanno a zero (parliamo di
conduttori perfettamente metallici), per cui il termine a sinistra si annulla
0 k
2
cj
kci
2
ds
i j
S
Ecco che i due casi possibili sono:
il prodotto scalare si annulla
gli autovalori coincidono
Gli autovalori possono coincidere o perché i=j, oppure perché si tratta
di modi degeneri. Nel caso di modi degeneri, si può dimostrare che si
possono costruire due modi, combinazione lineare i e j, tra loro
ortogonali
L’ortogonalità dei modi implica che due modi in una guida uniforme in z non
si scambino energia. Per aversi scambio di energia occorre una
perturbazione lungo il percorso
Di fatto i modi costituiscono non solo un insieme di funzioni ortogonali,
ma anche COMPLETO: un campo di forma arbitraria può essere
ottenuto sommando un numero infinito di modi opportunamente pesati
Il campo di forma arbitraria è quello che potrebbe essere per esempio
necessario per descrivere il campo del generatore, oppure un campo
che soddisfi le condizioni al contorno in una sezione in cui la guida
viene perturbata (per esempio inserendo una vite metallica)
Se inseriamo per esempio una vite metallica in un certo punto, nessun
modo singolarmente soddisfa le condizioni al contorno (annullamento
campi E tangenziali sulla vite), ma una loro sovrapposizione sì: per
esempio se rappresentano le componenti x dei campi elettrici dei modi,
in una sezione z, poniamo z=0 sarà
E x ( x, y) Vnn
n 0
Il calcolo dei coefficienti Vn è immediato: se vogliamo per esempio
conoscere Vi, facciamo il prodotto scalare a destra e sinistra per i
E x ( x, y)i ds Vn in ds Vi
n 0
S
Poiché tutti i prodotti scalari si sono annullati tranne quello per i=n
(abbiamo poi considerato i modi normalizzati)
Pensiamo alla guida più semplice: i TM hanno campi (Ex,Ez, Hy) ed i TE
(Ey, Hx, Hz). Se vogliamo rappresentare tutto il campo elettrico
trasversale, avremo bisogno di sovrapporre sia i modi TE (che ci danno le
componenti in x) che quelle TM (per avere le componenti in y). In una
sezione arbitraria
Et ( x, z ) u x Vn
S
TM TM
e n ( x)e
x
n z
n z
u y VnTE eTE
(
x
)
e
n
y
n 0
n 1
In realtà, l’apice “+” preannuncia che occorrerà considerare sia onde
progressive che onde regressive.
Le espressioni appena introdotte suggeriscono di trattare le guide come
insiemi di linee di trasmissione, che non si vedono per via dell’ortogonalità
dei modi
In un tratto con un solo modo, basta una linea, con l’accortezza di
considerare V non la “tensione”, ma l’ampiezza elettrica del modo. Ecco
che, sebbene non valgano le leggi di Kirchoff, e sebbene non si sia il più
delle volte in presenza di modi TEM (in cui il concetto di differenza di
potenziale resta valido purché ci si limiti a sezioni trasversali), POSSIAMO
RECUPERARE UNA RAPPRESENTAZIONE CIRCUITALE
Infatti per il campo magnetico
H t ( x, z ) Vn
TM
n 0
TM
h n ( x)e
n z
n z
VnTE hTE
(
x
)
e
n
n 1
Ma sappiamo di poter usare il concetto di impedenza modale
h n y0n u z e n
H t ( x, z ) Vn
n 0
TM
y0TM
uz
n
e n ( x)e
TM
n z
n z
VnTE y0TEn u z eTE
(
x
)
e
n
n 1
Guide circolari
La maggiore complicazione discende dalla necessità di utilizzare le
coordinate cilindriche: basta verificare come si scrive il laplaciano. Per i TM
1
1
r E z r E z 2 2 E z k c 2 E z
r
r
2
Proviamo di nuovo con la separazione di variabili
Ottenendo
E z Rr F
R' F F ' ' R
R F
2 k c 2 FR
r
r
E dividendo per
FR / r 2
F''
2
''
F
R
R
'
F
'
'
2 2
2
''
r
r kc r
R
R'
2 2
2
2
r
r
k
r
R
R
F
c
R
R
''
Mentre la prima è la solita, la seconda ha come soluzione funzioni di Bessel
di ordine
R AJ (k c r ) BN (k c r )
F C cos( ) Dsin ( )
Notiamo che, perché il comportamento angolare si ripeta dopo =2, deve
essere intero (dopo tutto F descrive il campo al variare dell’angolo nella
sezione della guida). Inoltre =0 è accettabile, poiché individua solo
soluzioni senza variazione angolare
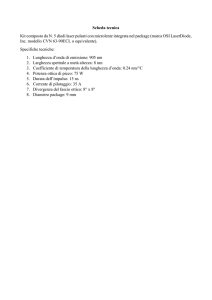
1
Le J si dicono di “prima
specie” ed hanno un
comportamento simile
alle funzioni
armoniche: di fatto si
approssimano con
coseni per argomenti
grandi
J0( x )
0.5
J1( x )
Jn( 2 x )
0
0.5
0
5
10
x
15
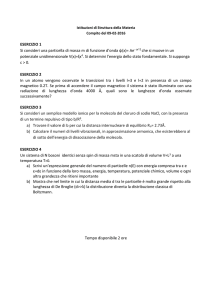
Le N (Y in figura, notazione di Mathcad) si dicono di seconda specie: sono
singolari nell’origine ed approssimano dei seni per argomenti grandi
2
0
Y0( x )
Y1( x )
Yn( 2 x )
2
4
0
5
10
x
15
Poiché non ci aspettiamo un campo Ez infinito nel centro, scartiamo le N:
B=0
Notiamo che delle funzioni seno e coseno possiamo ritenerne una sola,
eventualmente sfasata. Per determinare kc dobbiamo imporre
l’annullamento per r=a, se a è il raggio della guida: questo restituisce
l’equazione caratteristica (quella che che da i kc, che abbiamo detto sono
gli autovalori)
J (kc a) 0
Ora, per ogno , avremo infiniti zeri. Per esempio per =0 avremo il primo
zero a 2.405. In generale se indichiamo con pn,m l’m-simo zero della
funzione di Bessel di ordine n, otterremo
k c n ,m p n , m / a
In particolare per il primo modo
kc0,1 2.405 / a f c
2.405
2a
Per i TE dovremo risolvere l’equazione duale: tutto segue allo stesso modo,
ma ora la condizione al contorno va applicata alla derivata di Hz
H z
H z
n
r
r a
0 J n ' k c a 0
E dovremo trovare max e
min di J
Troviamo così che il primo modo è il TE11, per il quale
kc1,1 1.84 / a f c
1.84
2a
E che risulta anche il modo fondamentale
Quanto detto ci consente anche di calcolare i modi superiori di un cavo
coassiale, per il quale, come sappiamo, il modo fondamentale è TEM
In tal caso, però, non potremo scartare le
funzioni di Bessel di seconda specie,
perché andremo a costruire la soluzione
solo tra ri ed re
Dovremo imporre l’annullamento di Ez su ri
ed re, essendo
E z A cos( )BJ (kc r ) CN (kc r )
re
ri
Imponendo le condizioni al contorno si ha
BJ (k c ri ) CN (k c ri ) 0
BJ (k c re ) CN (k c re ) 0
E’ un sistema omogeneo che ammette soluzioni solo se il determinante
della matrice associate è nullo, ovvero se
N (k c ri ) J (k c ri )
N (k c re ) J (k c re )
Che è la nostra equazione caratteristica; si risolve numericamente.
Analogamente si fa per i TE, in cui le condizioni sono applicate sulle
derivate prime
N ' (k c ri ) J ' (k c ri )
N ' (k c re )
J ' (k c re )
Un’espressione approssimata del primo TE, che risulta effettivamente il
primo modo superiore, è
Che consente di calcolare la frequenza
kc 2 /(ri re )
oltre il quale il coassiale smette di essere
monomodale
")