Introduzione alle distribuzioni di
probabilità
• di Gauss o normale
• di Bernoulli o binomiale
• di Poisson o dei casi rari
La distribuzione di Gauss
Sia x0 il valore “vero” di una grandezza
misurabile .
Qual è la probabilità di ottenere un valore x
effettuando una misura di ?
Dipende dalla procedura di misura
Se la procedura fosse quella ideale dei
“matematici”:
allora:
1 se x x0
P( x)
0
se
x
x
0
Se la procedura fosse quella fisica
ottenuta mediante uno strumento di
sensibilità x:
Allora potrebbero presentarsi due situazioni in
dipendenza dal valore x :
• x grande (scarsa sensibilità dello strumento)
• x piccolo: x = dx
(alta sensibilità dello strumento)
x grande (scarsa sensibilità dello strumento)
x
x1
x2
x3
x4 … numeri rilevabili
dallo strumento
x0
in questo caso
lo strumento segnerà x3
1 se 0 x0 xi x
P( xi )
altrimenti
0
Per capire perché si introduce la
distribuzione di probabilità …
• è opportuno aspettare ad analizzare la misura
fatta con uno strumento ad alta sensibilità
• e considerare invece la seguente situazione:
• Il valore della variabile x dipenda dall’esito di
un esperimento o gioco aleatorio (la variabile
si dice aleatoria).
• Esempio: la somma media ottenuta lanciando
m dadi
Il caso m = 2
• Si supponga di aver ottenuto:
1
4
• Allora il valore della somma media è:
1 4
x
2,5
2
Tale valore lo si sarebbe ottenuto anche se fossero
uscite le facce con: (4 e 1) o (2 e 3) o (3 e 2) . In
totale sono quattro casi favorevoli all’uscita del
valore medio 2,5
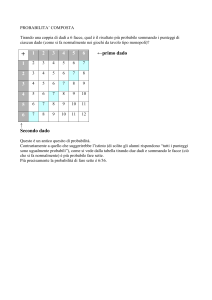
Ecco l’istogramma che fornisce il numero di casi
favorevoli all’uscita di ognuno dei valori possibili della
somma dei numeri che escono sulle facce di due dadi
8
numero casi
7
m=2
6
5
4
3
2
1
0
1
2
3
4
5
6
7
somma
8
9
10
11
12
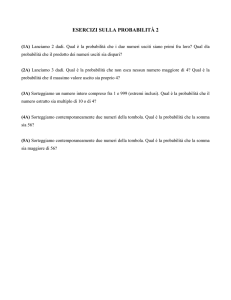
Ecco il grafico della funzione discreta che associa ad
ogni valore x della somma media la sua probabilità
0.2
probabilità
m=2
0.18
0.16
0.14
0.12
0.1
0.08
0.06
0.04
0.02
x
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
osservazione
• Una volta conosciuta la probabilità di uscita
del valore medio x , si avrà anche la
probabilità che in un lancio di m dadi si
ottenga mx come somma .
• Per m = 1 :
1/6
1 2 3 4 5 6
In accordo col fatto che 1/6 è la probabilità di
uscita di ognuno dei numeri sul dado
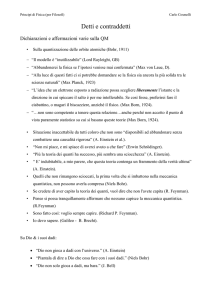
Per m = 3
0.14
m=3
probabilità
0.12
0.1
0.08
0.06
0.04
0.02
x
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
Domanda: qual è la probabilità che la somma
media sia compresa tra 2 e 3 estremi inclusi?
Risposta:
• 2x3
x = 2 x = 2,5 x = 3
P(2 x 3) = P(2) + P(2,5) + P(3)
In generale: Pxi x x f Pxk
k i
e nel caso in cui i valori della variabile aleatoria
si addensino, cioè xk+1 = xk + dx con dx 0
allora …
f
… allora
Pxk
Pxi x xi Pxk
dx
dx
k i
k i
f
f
Tra parentesi quadre è espresso il valore medio
di una funzione nell’intervallo dx, così che la
somma sia interpretabile come somma di
rettangoli di base infinitesima.
È possibile quindi introdurre una funzione
detta “distribuzione di probabilità”
tramite la quale si è in grado di associare ad ogni
intervallo di valori la probabilità che esso si
verifichi in un esperimento:
xf
dp
P xi x x f dx
dx
xi
Tale funzione deve soddisfare la seguente
proprietà:
dp
P( x ) dx 1
dx
Nel caso della misura con uno
strumento a bassa sensibilità:
La distribuzione di probabilità:
?
dp ? se
altrimenti
dx 0
deve essere definita in modo da soddisfare:
xf
dp
P( xi x x f ) dx
dx
xi
e, in particolare:
P( xi x xi x)
xi x
xi
1 se
dp
dx
dx
0
xi x0 xi x
altrimenti
Tale la distribuzione è detta “delta di
Dirac”:
dp
x x0
dx
xi x
1 se xi x0 xi x
P( xi x xi x) x x0 dx
altrimenti
0
xi
La funzione può essere pensata
come limite di alcune funzioni
• Ecco un esempio:
1
se x0 x x0 x
x x0 lim x
x 0
altrimenti
0
• La distribuzione di probabilità dei
“matematici” è un altro esempio
• Ne seguirà a breve un altro ancora
(limite di una gaussiana)
x piccolo: x = dx
(alta sensibilità dello strumento)
Nella ripetizione delle misure nelle stesse condizioni, lo
strumento rileva diversi numeri. Si possono ipotizzare più
cause della variabilità delle misure ma nulla di certo,
soprattutto che sia controllabile per garantire le setsse
condizioni di ripetibilità: diciamo che le variazioni sono
accidentali.
P( xi x xi )
xi
dp
dx
dx
xi
> dx
La distribuzione di probabilità dp/dx è ottenibile ricorrendo
alla definizione frequentista di probabilità:
P(x) = n(x)/N
n(x) è il numero delle volte
In cui la misura della grandezza ripetuta N
volte ha dato il valore x appartenente alla
successione xi = idx .
Risulta con buona approssimazione:
n( x) dp
1
dx
e
N
dx
2
x x0 2
2 2
dx
n(x) con N lanci di 1/dx dadi
n
3,5
x
X0 è il valore più probabile
ma è anche il valor medio:
N
N'
x n x
i 1
i
N
k 1
'
k
k
N
N'
k 1
dp
f k xk x dx x0
dx
n’k è il numero di volte in cui si è ottenuto il
N'
valore xk :
n
Mentre:
'
k
n
fk
N
k 1
'
k
N
Si chiama deviazione standard:
N
2
x x
i 1
2
i
N
0
...
x x
2
0
dp
dx
dx
risulta che:
P(x0 – < x < x0 – ) = 68 %
La f(x) è detta distribuzione di Gauss
1
f ( x)
e
2
x x0 2
2 2
• Essa è simmetrica rispetto alla retta x = x0 , in
cui presenta un massimo;
• Presenta due flessi in x = ;
f ( x) x x0
• Inoltre risulta che lim
.
0
La distribuzione di Bernoulli
• To be continued