LICEO CANTONALE LOCARNO
Sistemi Dinamici Caotici
Lavoro di maturità nell'ambito della teoria del caos e
della meccanica statistica
Alessio Mina
2014-2015
Professore responsabile:
Christian Ferrari
In copertina:
La teoria del caos como orden distinto: Yo, sin vos
(La teoria del caos come un ordine diverso: io, senza te)
Carla Bucceri
Prefazione
In ogni caos c'è un cosmo, in ogni disordine un ordine segreto.
Carl Gustav Jung
La parola caos possiede senza dubbio un fascino intrinseco e pensare che questo concetto
possa legarsi alla sica ha, n da subito, suscitato in me un forte interesse. La prima domanda
che mi sono posto è: com'è possibile che la sica, che si pregge di portare ordine e comprensione
nel mondo attraverso lo studio dei fenomeni che ci circondano e la formulazione di leggi che si
basano sulla precisa matematica, possa abbracciare il caos?
Immagino che molti, dopo aver incontrato per la prima volta il termine sica del caos, abbiano avuto l'impressione di trovarsi di fronte a un ossimoro. Nel corso del mio lavoro di maturità
ho avuto la possibilità di conoscere, in parte, questa teoria e di comprendere l'eleganza di quella
che è solo apparentemente una contraddizione. È stato inoltre un importante obiettivo riuscire
a sviluppare un procedimento di lavoro scientico, metodico e preciso per esporre una teoria sica.
Quando, nel mese di gennaio 2014, il Professor Ferrari mi ha proposto una serie di possibili
temi da approfondire nel lavoro di maturità, quelli legati alla teoria del caos hanno immediatamente attirato il mio interesse, pur sapendo ben poco circa il tema. Ho quindi fatto un piccolo
salto nel buio. I nuovi concetti matematici e i termini tecnici sconosciuti, che ho incontrato in
un primo approccio all'analisi dei sistemi dinamici caotici, hanno contribuito notevolmente a
preservare questo stato di oscurità.
Fortunatamente, il Professore Christian Ferrari, che mi ha seguito costantemente durante lo
svolgimento di questa ricerca, ha saputo guidarmi con sicurezza attraverso il mondo del caos e
si è dimostrato sempre disponibile ad aiutarmi nei momenti più critici. Il suo sostegno è stato
fondamentale per la riuscita del mio lavoro e quindi non posso che ringraziarlo per l'impegno che
mi ha dedicato.
Ho inoltre trovato stimolante collaborare con Ezio Bonetti che ha anche scelto di studiare
un tema legato alla teoria del caos, ovvero quello della geometria frattale: quando la mia analisi
è sfociata nell'area di sua competenza, ho potuto confrontarmi con lui per comprendere meglio
alcuni aspetti. Sono poi grato a Emile Garbani Nerini per il supporto informatico che mi ha
fornito per redigere il testo con LATEX. Desidero inne ringraziare il Professor Gianni Boa e
il Professor Renato Züger che, rispettivamente in ambito teologico e losoco, hanno saputo
fornirmi interessanti spunti di riessione. Grazie a loro, questo lavoro di maturità ha potuto
arontare il tema del caos con una visione più ampia, che non si limita solamente alla sica.
iii
Abstract
Questo lavoro di maturità intende studiare i sistemi dinamici iperbolici nell'ambito della teoria
del caos. Al contrario delle altre rivoluzioni che hanno segnato la sica del XX secolo, ossia la
relatività e la quantistica, il caos è molto meno conosciuto. Lo scopo di questo testo è mostrare
che caos non è sinonimo di disordine né di casualità. I sistemi dinamici caotici e il loro comportamento verranno descritti da precise equazioni matematiche e vedremo come in questa teoria
convivano imprevidibilità e ordine.
Il primo capitolo ha una funzione introduttiva e analizza la genesi di questa nuova scienza. Cercheremo di rispondere, coniugando la sica alla losoa, ad alcune interessanti domande
come: dove possiamo vedere il caos? L'evoluzione dell'universo è già totalmente determinata?
Saremo mai in grado di prevederla? La nostra realtà è semplicemente in balia del caso o delle
equazioni deterministiche?
La teoria del caos ci mostra che l'evoluzione di un sistema caotico è prevedibile all'innito
solo se si conosce con precisione innita la condizione iniziale del sistema, poiché il valore reale
di un'osservabile e quello misurato portano a due evoluzioni che divergono esponenzialmente
nel corso del tempo. Nel secondo capitolo verrà quindi presentato un tipo di sistema dinamico:
le mappe. Queste strutture e le loro proprietà verranno descritte matematicamente e, cosa più
importante, riporteremo le tre proprietà che possiede un sistema caotico: la sensibilità alle condizioni iniziali, la densità di un insieme di orbite periodiche nello spazio delle fasi e la transitività.
Inne descriveremo un concetto fondamentale per la teoria del caos, ossia quello di attrattore.
Nel terzo capitolo presenteremo quattro esempi di mappe caotiche e li analizzeremo avvalendoci dei concetti presentati nel capitolo due. In particolare, riveleremo e quanticheremo il
comportamento caotico di questi sistemi. Nel quarto esempio, inoltre, entreremo nel campo della
geometria frattale.
Inne studieremo i sistemi dinamici caotici con un approccio statistico: partendo dal problema dell'irreversibilità di alcune evoluzioni, vedremo le soluzioni che propongono rispettivamente
Boltzmann e Gibbs. Il primo introduce il concetto di ergodicità, mentre il secondo quello di mixing. Dopo aver denito e analizzato questi concetti, utilizzando anche alcuni esempi di sistemi
dinamici del terzo capitolo, dimostreremo che un sistema mixing è anche ergodico.
In seguito, deniremo l'entropia di Kolmogorov-Sinai, che è una caratteristica dei sistemi caotici
e che misura la produzione di informazione all'interno di un sistema dinamico. Anche qui, illustreremo questi concetti sulle mappe presentate nel terzo capitolo.
Nell'ultima parte, esporremo l'equazione di Boltzmann che permette di calcolare l'evoluzione
temporale della densità di probabilità che delle particelle si trovino in una certa regione dello
spazio delle fasi e l'annesso teorema H . Per concludere, vedremo che un sistema mixing presenta
le tre proprietà del caos.
v
Indice
Prefazione
iii
Abstract
v
1 Armonia e dissonanza
1
1.1
1.2
1.3
1.4
1.5
1.6
Determinismo . . . . . . . . . . . .
Caso . . . . . . . . . . . . . . . . .
Libero arbitrio . . . . . . . . . . .
Caos . . . . . . . . . . . . . . . . .
Meteorologia: la culla del caos . . .
Un'applicazione industriale del caos
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 Mappe caotiche
2.1
2.2
2.3
2.4
2.5
Sistemi dinamici . . . . . . . . . . . . . . . . . . . .
Descrizione matematica delle mappe unidimensionali
2.2.1 Denizione . . . . . . . . . . . . . . . . . . .
2.2.2 Punti ssi . . . . . . . . . . . . . . . . . . . .
2.2.3 Punti periodici . . . . . . . . . . . . . . . . .
Descrizione matematica delle mappe bidimensionali .
2.3.1 Denizione . . . . . . . . . . . . . . . . . . .
2.3.2 Punti ssi . . . . . . . . . . . . . . . . . . . .
2.3.3 Punti periodici . . . . . . . . . . . . . . . . .
Il caos nelle mappe . . . . . . . . . . . . . . . . . . .
2.4.1 Le tre proprietà del caos . . . . . . . . . . . .
2.4.2 Sensibilità nel caso unidimensionale . . . . . .
2.4.3 Sensibilità nel caso bidimensionale . . . . . .
Descrizione matematica dell'attrattore . . . . . . . .
3 Esempi di mappe caotiche
3.1
3.2
3.3
3.4
La
La
La
La
mappa
mappa
mappa
mappa
diadica . . . . . . . . . .
del panettiere . . . . . .
di Arnold . . . . . . . .
del panettiere dissipativa
.
.
.
.
.
.
.
.
.
.
.
.
4 Meccanica statistica dei sistemi dinamici
4.1
4.2
4.3
4.4
Spazi di misura . . . . . . . . . . . . .
Irreversibilità . . . . . . . . . . . . . .
L'ipotesi ergodica . . . . . . . . . . . .
Il teorema ergodico di Birkho . . . .
Descrizione matematica dell'ergodicità
.
.
.
.
.
vii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
3
4
6
7
10
13
13
13
13
14
14
15
15
15
17
17
18
19
20
21
23
23
28
33
38
41
41
44
44
46
48
viii
INDICE
4.4.1 Media temporale e media statistica . . . . . . . . .
4.4.2 Interpretazione matematica del teorema di Birkho
4.4.3 Il teorema della ricorrenza . . . . . . . . . . . . . .
4.4.4 Denizioni di ergodicità . . . . . . . . . . . . . . .
4.5 L'ergodicità nelle mappe . . . . . . . . . . . . . . . . . . .
4.5.1 La mappa diadica . . . . . . . . . . . . . . . . . .
4.5.2 La mappa rotante . . . . . . . . . . . . . . . . . .
4.5.3 La mappa del panettiere . . . . . . . . . . . . . . .
4.6 Sistemi mixing . . . . . . . . . . . . . . . . . . . . . . . .
4.6.1 Denizione . . . . . . . . . . . . . . . . . . . . . .
4.6.2 Mixing ed ergodicità . . . . . . . . . . . . . . . . .
4.6.3 La proprietà di mixing nelle mappe . . . . . . . . .
4.6.4 Mixing ed equilibrio . . . . . . . . . . . . . . . . .
4.7 L'entropia di Kolmogorov-Sinai . . . . . . . . . . . . . . .
4.8 L' equazione di Perron-Frobenius . . . . . . . . . . . . . .
4.9 L'equazione di Boltzmann per la mappa del panettiere . .
4.10 Meccanica statistica e caos . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
48
49
49
49
50
50
51
52
55
55
56
58
59
60
65
67
70
Bibliograa
71
Indice analitico
73
Capitolo 1
Armonia e dissonanza
H τ oι µὲυ πρώτ ιστ α X άoζ γ έυετ.
No, non si tratta di una complicata formula matematica per descrivere un particolare evento
sico, non ancora. Queste lettere greche non rappresentano costanti o grandezze che di un corpo,
ma sono proprio lettere greche.
Dunque per primo fu il caos. Ecco ciò che si cela dietro a questa frase. Si tratta di un verso della
Teogonia di Esiodo. Gli antichi Greci non erano gli unici a pensarla così circa l'età primordiale
dell'universo: anche la mitologia indiana, infatti, aerma che all'inizio tutto quello che esisteva
si trovava immerso nella più profonda oscurità in completa confusione, ossia nel caos. Il caos è il
risultato della dissoluzione dell'universo che esisteva in precedenza. Vi è inoltre un mito sumero
secondo cui, l'universo nasce dal caos e perno la Bibbia descrive la creazione dell'universo a partire da uno stato in cui vi era terra informe e vuota, e le tenebre coprivano la faccia dell'abisso.
Al caos segue sempre l'intervento divino che plasma il mondo: l'ordine, equiparato al bene, viene
creato a partire dal disordine, che è il male.
È aascinante constatare come questo concetto sia comune a così tante mitologie antiche: ciò
signica che è ben radicato nel nostro pensiero. Non sorprende dunque che i primi scienziati a
intuire il ruolo del caos1 nella realtà abbiano incontrato molte resistenze da parte del resto della
comunità scientica.
Secondo queste credenze, ordine e caos sono incompatibili, l'uno è il contrario dell'altro. Dio
è dunque intervenuto ed ha creato l'ordine, scacciando le tenebre del caos. Dove c'è ordine, ci
sono delle leggi ed è qui che usciamo dal campo religioso ed entriamo in quello scientico. Non
è forse lo scopo di ogni scienziato avvicinarsi il più possibile a comprendere le leggi che regolano
l'universo? A partire da Newton queste leggi sono state esplicitate e il mondo è diventato sempre
più chiaro. L'avanzata dell'ordine sembrava destinata a inghiottire interamente il disordine.
Oggi dunque il caos è estinto? Tutt'altro, oggi il disordine è più presente che mai. Se prima si
pensava che non esistesse, oggi si tende a vederlo ovunque. Prima di quando? Prima della terza
rivoluzione scientica che, assieme alla relatività e alla quantistica, ha distrutto le certezze della
sica classica per ricostruire una nuova scienza. Si tratta dell'avvento della teoria del caos, cui è
strettamente connesso il tema di questo lavoro di maturità.
Ma cos'ha veramente demolito questa teoria? La certezza di cui si parlava all'inizio, ossia
l'incompatibilità tra ordine e disordine.
1
Si noti che il concetto di caos in sica o matematica non corrisponde assolutamente al caos in senso mitologico.
Il signicato esatto di queste due accezioni è riportato nella sezione 1.4.
1
2
CAPITOLO 1. ARMONIA E DISSONANZA
Nell'induismo, l'universo attraversa un ciclo di tre fasi che si ripete all'innito: creazione,
conservazione e distruzione che corrispondono rispettivamente alla nascita, la vita e la morte.
Brahma è il dio della creazione, Visnu è il dio della conservazione e Shiva il dio della distruzione
e della rigenerazione. Quest'ultimo interviene dissolvendo in un primo momento la dimensione
materiale, per poi riportare l'ordine nella rigenerazione dell'universo. Shiva è quindi benevolo e
terribile allo stesso momento, rappresenta ordine e disordine: l'armonia che si realizza quando si
dissolve il mondo materiale con le sue leggi.
E se armonia e dissonanza si combinano nella bellezza musicale, ordine e caos si combinano
nella bellezza della matematica.
1.1
Determinismo
Il determinismo è una concezione losoca secondo la quale tutti i fenomeni del mondo sono
collegati l'un l'altro e si vericano seguendo un ordine necessario e invariabile. Il determinismo
riguarda il rapporto tra causa ed eetto, tra legge naturale universale e singolo fenomeno. Secondo questo rapporto, data una causa o una legge, può vericarsi soltanto un certo eetto o
particolare fenomeno. Non c'è dunque spazio per una variazione spontanea.
Questo termine è stato introdotto nel linguaggio losoco nella seconda metà del XVIII secolo, anche se le origini sono antiche. I Babilonesi erano convinti che il destino fosse già scritto
nelle stelle, ma gli antichi Greci furono i primi a formulare con precisione un determinismo rigidamente meccanicistico. Aristotele distingueva invece tra causa materiale, causa eciente e
causa nale. Tutte le cose sarebbero dunque sottoposte a una legge universale che volge ogni
cosa verso il meglio. Tutto ciò che accade è in funzione di uno scopo. È quindi questa la legge
che regna suprema.
Cristianesimo e Islam portarono a spogliare il determinismo naturale dei suoi caratteri di necessità e sottopongono il destino al volere di Dio, che può determinare il corso degli eventi. Giunse poi
il Rinascimento in cui si negarono gli interventi soprannaturali e vi fu un ritorno alla convinzione che vi fosse una legge teologica razionale, ossia che gli eventi fossero determinati da cause nali.
La rivoluzione scientica portò la svolta fondamentale ed estromise le cause nali dalla natura. In questo periodo, Newton pubblicò la sua celebre opera Philosophiae Naturalis Principia
Mathematica , in cui sono esposte le equazioni e i principi che regolano la meccanica. Newton
espresse le sue leggi nella forma di equazioni matematiche che si riferiscono non solo alla quantità ma anche alla rapidità con cui tali quantità cambiano. Le equazioni che implicano rapidità
di variazione sono dette equazioni dierenziabili. Ad esempio, derivando l'equazione che indica
la velocità di un sasso in caduta libera si ottiene l'equazione dell'accelerazione.
Il contributo di Newton alla sica è stato senza dubbio fondamentale. Con queste nuove conoscenze era possibile calcolare l'evoluzione di un sistema isolato attraverso delle equazioni, a patto
che si conoscessero posizione, velocità iniziale e le forze. La soluzione di un'equazione del genere,
date le condizioni iniziali, è unica; ciò signica che, conoscendo lo stato iniziale del sistema, si
può determinare univocamente il suo stato futuro.
Il problema, però, consiste nel fatto che raramente un sistema non subisce inuenze esterne. Ma la conclusione che se ne trae è estremamente interessante: se si conoscono esattamente
posizione e velocità (e qui chi ha studiato le basi della sica quantistica e il principio di indeterminazione si morderà la lingua) di ogni particella di materia nell'intero universo in un qualche
1.2.
CASO
3
istante ssato, si può stabilire totalmente il futuro dell'universo.
Riportiamo qui la formulazione elegante che Pierre-Simon Laplace (gura 1.1), uno dei più
grandi matematici del Settecento, ha dato del determinismo. Il brano è tratto dall'opera Essai
philosophique sur les probabilités, Courcier 1814.
Un'intelligenza che, per un istante dato, conoscesse tutte le forze da cui la natura è animata
e la situazione rispettiva degli esseri che la compongono, se fosse abbastanza vasta da sottoporre
questi dati ad analisi, abbraccerebbe nella stessa formula i moti dei corpi più grandi dell'universo
e quelli dell'atomo più leggero: per essa non ci sarebbe nulla d'incerto e il futuro come il passato
sarebbe presente ai suoi occhi.
Figura 1.1:
Pierre-Simone Laplace (1749-1827) è stato un matematico, sico, astronomo e nobile
francese.
Per tutto il XVIII secolo, vi fu una grande ducia nel determinismo meccanicistico come
modello di spiegazione dei fenomeni naturali. Nel secolo successivo, le ricerche naturalistiche
diedero forte sostegno al concetto di determinismo, soprattutto per quanto riguarda le teorie
evoluzionistiche.
La battuta d'arresto si ebbe nel XX secolo, quando la meccanica classica venne messa in crisi
dalla relatività prima e dalla quantistica poi. Secondo quest'ultima, è impossibile denire la posizione di tutti i punti che compongono un sistema. Inoltre vale il principio di indeterminazione di
Heisenberg, cui si è già accennato prima: quanto più precisamente la posizione di una particella
è determinata, tanto meno precisamente si può conoscere la velocità, e viceversa.
Secondo lo stesso Heisenberg, nella formulazione se conosciamo esattamente il presente, possiamo prevedere il futuro non è sbagliata la conclusione, bensì la premessa: è impossibile conoscere
esattamente il presente di ogni elemento determinante.
1.2
Caso
Il caso è un concetto noto al sapere comune da molto tempo. Spesso gli esseri umani cercano
l'imprevedibilità, sia in modo intelligente (la teoria dei giochi aerma che a volte una scelta presa
a caso può essere la migliore scelta razionale), sia in modo emotivo (lotterie e gioco d'azzardo).
La teoria delle probabilità studia questo fenomeno e oggi vi sono interessanti applicazioni in
campo scientico, si pensi soprattutto alla meccanica statistica. Il caso è inoltre l'ingrediente
4
CAPITOLO 1. ARMONIA E DISSONANZA
fondamentale delle teorie evolutive su cui si basa tutta la biologia.
Apparentemente il determinismo laplaciano non lascia alcuno spazio al caso. Lanciando un
dado, ad esempio, le leggi della meccanica classica determinano in teoria con assoluta precisione
il risultato che si ottiene. Ma poiché, come è appena stato detto, il caso e le probabilità svolgono
un ruolo molto importante nella comprensione della natura, si potrebbe essere tentati di riutare
il determinismo.
Anzitutto cerchiamo di evidenziare la dierenza tra caso e determinismo.
Un sistema dinamico, ossia un sistema il cui stato cambia nel tempo secondo una specica regola, si dice deterministico nel seguente caso: partendo da condizioni iniziali identiche si ottengono
risultati identici, ciò non implica necessariamente essere in grado di prevedere questi risultati.
Un sistema aleatorio è caratterizzato dal comportamento contrario: dalle stesse condizioni iniziali
si possono ottenere risultati diversi.
Mostreremo ora come questi due concetti possano convivere. Anzitutto non vi è incompatibilità logica tra caso e determinismo sico, siccome lo stato di un sistema nell'istante iniziale,
anziché essere ssato in modo preciso, può essere distribuito secondo una certa legge casuale.
Di conseguenza, anche negli istanti successivi, il sistema avrà una distribuzione casuale, la quale
potrà essere dedotta grazie alle leggi della meccanica deterministica a partire dalla distribuzione
dell'istante iniziale. In altre parole, lo stato iniziale non è mai conosciuto con assoluta precisione
e vi è sempre una piccola quantità di caso.
Si vede dunque che il determinismo non esclude il caso.
Le relazioni tra caso e determinismo sono state dibattute a lungo in campo losoco. Tra
i molti protagonisti di questa diatriba, vi fu René Thom(gura 1.2), un matematico e losofo
francese che ha contribuito notevolmente alla topologia dierenziale ed è noto per la teoria delle
catastro. Egli sosteneva che, poiché la natura della scienza è di formulare delle leggi, ogni studio
scientico dell'evoluzione dell'universo sfocerà necessariamente in una formulazione deterministica.
Non si tratta, però, di un determinismo laplaciano, bensì di una teoria che include anche leggi
deterministiche che governano l'evoluzione della distribuzione delle probabilità. Il caso è quindi
contemplato in questa idea di determinismo.
1.3
Libero arbitrio
Come detto all'inizio, il determinismo è una concezione della realtà secondo cui tutti i fenomeni
sono collegati e si vericano seguendo un ordine invariabile. Quest'idea dell'universo esclude il
libero arbitrio. Se lo stato attuale è solo il risultato di uno stato passato e la causa di uno futuro,
allora tutto è già determinato e il nostro mondo si trova impotente in balia delle equazioni siche.
Accogliendo le idee di Thom, non si può sperare di risolvere questo problema prediligendo una
teoria sica all'altra, perché ogni teoria è per essenza deterministica.
Consideriamo, invece, l'opinione di Erwin Schrödinger(gura 1.2), uno dei padri della sica
quantistica. Il ruolo concesso al caso nella quantistica ha suscitato la speranza che questa nuova
sica sia più in accordo con le nostre idee sul libero arbitrio rispetto al determinismo laplaciano.
Tale speranza, aerma Schrödinger, è però sbagliata.
In primo luogo, si noti che non è il libero arbitrio degli altri che ci preoccupa: non ci crea infatti problemi pensare che le loro decisioni abbiano una spiegazione deterministica. Ciò che non
1.3.
Figura 1.2:
LIBERO ARBITRIO
5
A sinistra, René Thom (1923-2002), a destra Erwin Schrödinger (1887-1961).
accettiamo è la contraddizione tra determinismo e il nostro libero arbitrio, il quale ci sembra
caratterizzato dal fatto che abbiamo a disposizione molte opzioni e che ricorriamo alla nostra
coscienza per sceglierne una.
L'introduzione del caso nelle leggi siche non ci aiuta a risolvere questa contraddizione: non
possiamo certo dire che usiamo la nostra coscienza facendo una scelta a caso. La libertà della nostra scelta è d'altronde spesso illusoria, perché è condizionata da molti fattori esterni che spesso
nemmeno percepiamo.
Schrödinger fa il seguente esempio: se si partecipa a un pranzo uciale, con personalità importanti e noiose, si può pensare di saltare sul tavolo e di ballare nudi ma non lo si fa e non si può
quindi parlare di esercizio del libero arbitrio. In altri casi si fanno scelte realmente responsabili,
anche dolorose. Tuttavia, una scelta del genere non ha certo le caratteristiche del caso.
In conclusione, il caso non ci aiuta a capire il libero arbitrio e Schrödinger sostiene di non vedere
alcuna contraddizione tra il libero arbitrio e il determinismo della sica, classica o quantistica.
A questo problema è connesso l'antico quesito teologico della predestinazione. Dio ha deciso
in anticipo quali anime saranno salvate e quali dannate?
In questo caso, al libero arbitrio viene contrapposta l'onniscienza e l'onnipotenza di Dio. Se
si nega la predestinazione, allora si limitano i poteri dell'Onnipotente ma se l'accettiamo, vanichiamo ogni sforzo morale. In altre parole, se Dio non decide ciò che succede agli uomini, allora
i suoi poteri vengono ridotti. Se, invece, ha già deciso il destino di ognuno di noi, allora la nostra
determinazione ad avere un comportamento corretto è inutile.
Secondo la maggior parte dei critici, la dottrina della predestinazione fu difesa da Sant'Agostino
(354-430), da San Tommaso d'Aquino (1225-1274) e anche dal riformatore protestante Calvino(1509-1564). La Chiesa cattolica esclude oggi la predestinazione ed aerma che la sentenza sul
destino di ogni individuo sarà presentata al giudizio nale. Il singolo uomo si muove dunque in
un cammino di libertà guidato dalla fede verso la salvezza.
Per comprendere meglio questa complessa questione, ricorreremo a un paradosso: supponiamo
che la vasta intelligenza di cui parla Laplace utilizzi il determinismo delle leggi siche per predire
il futuro, e che successivamente si serva del libero arbitrio per contraddire le proprie previsioni.
Come risolvere questo paradosso? Possiamo negare il determinismo o il libero arbitrio, ma esiste
una terza possibilità.
Possiamo negare che qualcuno abbia una capacità di previsione suciente per creare un paradosso. Per violare le sue predizioni, la vasta intelligenza deve fare parte del sistema, di conseguenza il
sistema diventa piuttosto complesso. Vedremo in seguito che per prevedere esattamente il futuro
in un sistema caotico è necessario conoscere i dati riguardanti le parti che lo compongono con
una precisione innita. Ciò signica che la vasta intelligenza dovrà elaborare un numero innito
6
CAPITOLO 1. ARMONIA E DISSONANZA
di dati e quindi il compito di previsione diventa impossibilmente lungo.
In conclusione, ciò che spiega il nostro libero arbitrio, e ne fa una nozione utile, è la complessità dell'universo o, più precisamente, la nostra stessa complessità.
1.4
Caos
Giungiamo ora a un concetto fondamentale per questo lavoro di maturità, che è già stato accennato: il caos. Se cerchiamo questo termine sul dizionario troveremo:
càos: 1. Disordine, confusione, trambusto. 2. Nelle antiche cosmologie greche, lo stato di completo disordine degli elementi materiali preesistente alla formazione dell'universo ordinato.
A partire dal 1986, quando si tenne una prestigiosa conferenza internazionale sul caos, a queste due accezioni ne venne aggiunta una tecnica. Come spesso succede, si rivela dicile denire
un concetto del genere. Ecco la denizione:
3. (Mat.)
Comportamento aleatorio che si verica in un sistema deterministico.
Abbiamo già discusso nella sezione 1.2 la compatibilità tra casualità e determinismo. Anche
qui incontriamo la stessa questione. La denizione di caos è dunque, parafrasata, un comportamento irregolare governato da una legge.
Un'altra, a nostro parere migliore, denizione che è stata data da David Ruelle (1935), padre
del concetto di attrattori strani, è la seguente:
Evoluzione temporale con dipendenza sensibile dalle condizioni iniziali.
Qui fa la sua comparsa un nuovo concetto importantissimo per la teoria del caos: la sensibilità
alle condizioni iniziali. Un sistema dinamico possiede questa proprietà se, per delle condizioni
iniziali molto simili ma non identiche, l'evoluzione temporale porta a ottenere risultati completamente dierenti. La dierenza tra due stati iniziali simili cresce esponenzialmente. In termini
quantitativi, la velocità di crescita è determinata dall'esponente di Ljapunov. Questo tema verrà
esposto nelle sezioni 2.4.2 e 2.4.3.
Il capitolo tre di questo lavoro di maturità analizza quattro interessanti esempi di sistemi
dinamici caotici che sono sensibili alle condizioni iniziali.
Presentiamo qui, invece, un esempio più semplice per illustrare questo concetto. Supponiamo di
riuscire a mettere in equilibrio una matita sulla sua punta ben temperata. Teoricamente questa
condizione è possibile. Al momento che si lascia la matita, la minima deviazione dal punto di
equilibrio la farà cadere. Studiando il suo moto dal punto di vista della meccanica, si trova che la
velocità con cui si allontana dalla posizione di equilibrio cresce in modo esponenziale. Ben presto
la matita si troverà distesa sul tavolo.
Ecco dunque un esempio di dipendenza sensibile dalle condizioni iniziali. In altre parole, siamo
di fronte a un caso in cui un piccolo mutamento nello stato del sistema al tempo zero produce
un mutamento ulteriore che cresce in modo esponenziale. Una piccola causa ha quindi un grande
eetto.
Si potrebbe pensare che, per vericarsi, uno stato del genere richieda condizioni iniziali eccezionali. Al contrario, come si è già accennato, il caos è ovunque e ci sono moltissimi sistemi dinamici
1.5.
METEOROLOGIA: LA CULLA DEL CAOS
7
che possiedono questa proprietà.
Il concetto di caos, facendo il suo ingresso nelle scienze, ha cambiato la prospettiva con cui
si guardano alcuni problemi. Ciò che era semplice diventa complicato, viceversa questioni che ci
parevano complesse trovano una spiegazione semplice.
Consideriamo ad esempio l'operazione 2x2 − 1. Se applichiamo questa operazione più volte a
un numero compreso tra 0 e 1, otteniamo un comportamento stranissimo. L'evoluzione sembra
casuale e si nota che vi è sensibilità alle condizioni iniziali. Partendo da un'equazione deterministica, si ottiene un risultato privo di regolarità. Se, invece, facciamo la stessa cosa con l'operazione
x2 − 1, il comportamento che osserviamo è normale. Oggi non siamo in grado di comprendere le
ragioni di questo fatto.
Nel caso inverso, alcuni fenomeni che sembravano essere inspiegabili acquistano ragionevolezza. Prendiamo ad esempio il caso di un satellite di Saturno e immaginiamo che una sonda spaziale
riesca a misurare i suoi movimenti con una grande precisione. Sulla base di questi dati sarebbe possibile elaborare una previsione dei movimenti futuri del satellite. Ora ammettiamo che,
qualche mese dopo, lo stesso satellite venisse analizzato da un'altra sonda. Ciò che risulterebbe
sarebbe una considerevole discrepanza tra la previsione e la misurazione reale. La causa di questa
incoerenza sarebbe dicile da trovare. Si comincerebbero a ipotizzare invisibili fattori esterni,
errori nella teoria grazie a cui sono state fatte le previsioni, ecc. Se analizziamo la questione dalla
prospettiva introdotta dalla teoria del caos, ci si rende conto che la spiegazione consiste nella
sensibilità alle condizioni iniziali cui è soggetto il moto del satellite.
Naturalmente ciò non risponde a tutte le domande, ma ne pone delle altre che sono più corrette.
Questo è solo un esempio dei molti casi in cui scienziati di fronte a dati di matrice caotica hanno
ipotizzato un errore.
Attrattore
Prima di passare ad analizzare le conseguenze che la teoria del caos ha portato riguardo alle
previsioni, occorre chiarire il concetto di attrattore.
Un attrattore è una porzione dello spazio delle fasi, ossia lo spazio che contiene tutti i possibili
stati di un sistema e all'interno di cui si può rappresentarne l'evoluzione, verso la quale si muove
il punto che rappresenta il sistema, quando si attende abbastanza a lungo. Anché questa denizione sia sensata, è importante che le forze esterne che agiscono sul sistema siano indipendenti
dal tempo. Il secondo ingrediente fondamentale è la dissipazione, grazie alla quale, nello spazio
che rappresenta un sistema, c'è solo un piccolo insieme, l'attrattore appunto, che è davvero interessante. Per sistemi dinamici dissipativi si intendono sistemi che dissipano energia meccanica.
Nella sezione 2.5 verrà descritto questo concetto in termini matematici.
Il concetto di attrattore porta con sé un importante aspetto del caos: la stabilità. Un sistema
è denito stabile se non muta molto sotto l'inusso di piccole perturbazioni. Se un sistema caotico
viene in qualche modo allontanato dal suo attrattore, esso vi si riavvicinerà rapidamente.
1.5
Meteorologia: la culla del caos
È stato più volte detto che la teoria del caos è alquanto recente, ma quanto per la precisione?
8
CAPITOLO 1. ARMONIA E DISSONANZA
Il meteorologo Edward Lorenz (gura 1.3), del Massachusetts Institute of Technology, è considerato lo scopritore del caos deterministico. Egli si interessava al problema della convezione
atmosferica: gli strati inferiori dell'atmosfera sono scaldati dal suolo che riceve energia dal Sole,
quindi diventano più leggeri degli strati più elevati. Ne consegue un moto ascendente dell'aria
calda, più leggera, mentre l'aria fredda, più densa, discende.
Figura 1.3:
Edward Norton Lorenz (1917-2008), metereologo e matematico statunitese pioniere della
teoria del caos.
Lorenz semplicò notevolmente la questione e, invece di studiare l'atmosfera con i suoi milioni
di gradi di libertà, si occupò dell'evoluzione di un sistema a tre dimensioni. Quest'ultimo poteva
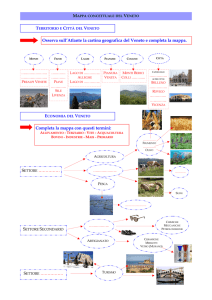
essere analizzato dal computer e il risultato che ottenne è l'attrattore di Lorenz (Figura 1.4).
Immaginiamoci lo stato dell'atmosfera come un punto P e lo spostamento temporale del punto
P , che rappresenta l'evoluzione dello stato atmosferico, è calcolato dal computer. L'attrattore
di Lorenz è disegnato dalla traiettoria del punto P , per tempi molto lunghi, nello spazio delle fasi.
Figura 1.4:
L'attrattore di Lorenz.
Ciò di cui si rese conto Lorenz è che, se il punto P avesse una posizione iniziale microscopicamente diversa, i particolari della gura che disegnerebbe nello spazio delle fasi verrebbero
modicati totalmente. L'aspetto generale sarebbe lo stesso, ma il numero di giri successivi attorno all'orecchio destro, rispettivamente sinistro, diventerebbero del tutto diversi. Questo fatto
è dovuto alla sensibilità alle condizioni iniziali. La sequenza di giri a destra e a sinistra è quindi
irregolare e dicile da prevedere.
Il risultato di questo studio non è una descrizione realistica dell'atmosfera ma ha fornito un
argomento molto forte a favore dell'imprevedibilità dei moti atmosferici: l'inadabilità delle pre-
1.5.
METEOROLOGIA: LA CULLA DEL CAOS
9
visioni meteorologiche a lungo termine è giusticata dalla dipendenza sensibile dalle condizioni
iniziali. L'osservazione iniziale, a partire da cui si elabora una previsione, non sarà mai abbastanza precisa. Di conseguenza, una piccola dierenza tra il dato rilevato e quello reale iniziale si
amplica in modo esponenziale no a ottenere una totale discrepanza tra la previsione secondo
il dato misurato e la situazione reale. Calcolando la velocità con cui questo errore iniziale cresce, è oggi possibile fare previsioni adabili no a 4-5 giorni. È possibile estendere questo periodo?
Oggi le previsioni vengono eettuate sulla base di modelli che suddividono l'intera atmosfera
terrestre in cubetti di dimensioni 15 km × 15 km in orizzontale e qualche centinaio di metri in
verticale. Per coprire l'atmosfera sono necessari 500 milioni di cubetti. Per ogni cubetto, ci sono
una decina di gradi di libertàda considerare. Questo spiega perché il progresso delle previsioni
meteorologiche sia andato di pari passo con l'aumento della potenza massima di supercalcolo
digitale disponibile.
Anché le equazioni siano trattabili, occorre dunque fare una forte approssimazione. Più piccolo
è il volume dei cubetti, minore sarà l'approssimazione.
Per rispondere al quesito che è stato sollevato, diminuendo il volume di questi cubetti, aumentando la potenza di supercalcolo e moltiplicando le sonde che rilevano dati atmosferici, è possibile
eettuare previsioni sulla base di dati sempre più vicini alla realtà. Tuttavia, ci vorrebbe una
precisione innita per eliminare la sensibilità alle condizioni iniziali.
Inoltre, per tornare al meteorologo Edward Lorenz, vi è un altro fatto da considerare. Lo scopritore del caos deterministico ipotizzò che le piccole dierenze iniziali, identicate come errori
di analisi, crescano tanto più rapidamente quanto più piccola è la loro scala spaziale, in modo
da rendere prima o poi inutile ogni sforzo di ridurre ulteriormente ampiezza e scala degli errori
d'analisi (per esempio aumentando a dismisura il numero delle stazioni di osservazione, la risoluzione degli strumenti di analisi o la precisione dei modelli usati). Questo spiegherebbe perché si
riesca a prevedere il percorso di un ciclone (un sistema di circa 1000 chilometri di diametro) con
largo anticipo, mentre risulta dicile localizzare con solo 12 ore di anticipo l'esatta localizzazione
nello spazio e nel tempo di un temporale estivo.
In conclusione, forse un giorno si riuscirà ad avere previsioni meteorologiche adabili no a
8 giorni, ma è fuori discussione prevedere il tempo che farà il mese successivo.
L'articolo che segna ucialmente la nascita del determinismo caotico risale al 1963, ed è stato
scritto da Lorenz e pubblicato sul Journal of the Atmospheric Science . È giusto che si ricordi,
però, che Poincaré aveva già calcolato e studiato un sistema caotico alla ne del XIX secolo,
risolvendo il problema dei tre corpi legato alla stabilità del sistema solare. Vi si enunciarono le
scoperte di cui abbiamo appena trattato. L'articolo non ottenne molto successo, anche perché
non raggiunse il giusto pubblico. Un sico, anche a quel tempo, dicilmente riusciva a leggere
le pubblicazioni che riguardavano il suo campo, tanto meno quelle concernenti un'altra scienza.
L'articolo rimase così nei cassetti per dieci anni, prima che cominciasse a suscitare interesse in
campo scientico.
Lorenz coniò inoltre il termine di eetto farfalla , dopo aver osservato che una minima approssimazione, che il suo computer aveva eettuato, aveva portato a ottenere una tendenza totalmente
inattesa delle equazioni che stava studiando.
Il battito di ali di una sola farfalla produce un minuscolo mutamento nell'atmosfera. Dopo qualche
giorno, il comportamento dell'atmosfera diverge da quello che sarebbe stato senza quel battito
d'ali. Ne consegue che, a un mese di distanza, non si verica un tornado che avrebbe devastato
le coste della Cina. Oppure, viceversa, si verica un tornado che non ci sarebbe stato.
10
CAPITOLO 1. ARMONIA E DISSONANZA
La farfalla, comunque, non fa saltare il tempo atmosferico su un nuovo attrattore, ma semplicemente lo sposta di poco su di esso. In altre parole, se un punto dell'attrattore è uno stato
meteorologico e l'attrattore è il clima, l'eetto farfalla modicherà la situazione atmosferica, non
il clima della Terra. Non si può dunque prevedere dove il punto P che rappresenta lo stato atmosferico sarà all'interno dell'attrattore, ma possiamo dire che, dopo un disturbo casuale, tornerà
su di esso. Il clima, dunque, è prevedibile anche a lungo termine.
Il caos è quindi una combinazione strana e meravigliosa di stabilità e imprevedibilità.
Per riassumere ciò che è stato detto in questa sezione, la meteorologia è un ottimo esempio
di applicazione della teoria del caos. In questo campo si nota come il caos, nonostante sia una
teoria deterministica, ammette solo previsioni a breve termine (l'eetto farfalla ha poca inuenza immediata). In questo consiste proprio la dierenza tra un modello caotico e uno casuale: in
entrambi i casi è impossibile eettuare previsioni a lungo termine ma solo nei modelli caotici è
possibile eettuare previsioni a corto termine.
Quali prospettive, invece, per il caos in altri campi? Se per la meteorologia si limita a dirci
che prevedere il tempo per il mese seguente è impossibile, in altre scienze si ottengono risultati
più sostanziosi, come nel caso dello studio della diusione dei casi di morbillo che presenta un
comportamento apparentemente caotico.
Al contrario, in astronomia i modelli caotici sembrano avere un futuro molto incerto, perché
richiedono una grande quantità di dati, fatto che comporta un alto costo di denaro in questo
settore.
L'apporto di questa teoria per la sociologia, l'economia e l'ecologia è, invece, demoralizzante.
Fare previsioni in questi ambiti è già di per sé dicile, poiché non si conoscono le equazioni
precise che determinano l'evoluzione di un sistema. La teoria del caos suggerisce che, anche se
si conoscessero, ci sarebbe comunque dipendenza sensibile dalle condizioni iniziali e ancora una
volta fare previsioni risulterebbe complicato.
1.6
Un'applicazione industriale del caos
Troppo spesso si sente qualcuno criticare alcuni campi scientici sostenendo che sono inutili a
ni pratici. Ecco dunque un'applicazione industriale della teoria del caos, o meglio, dei metodi
matematici usati per questa teoria. È sorprendente constatare che questa nuova teoria, le cui
implicazioni non hanno ancora avuto tutto il loro impatto potenziale sul pensiero scientico,
abbia già un'applicazione ingegneristica.
Si tratta di una macchina chiamata FRACMAT, che applica le tecniche caotiche della ricostruzione dello spazio delle fasi per risolvere un problema che ha gravato sull'industria della
costruzione di molle. La questione è la seguente: come si può stabilire, in modo rapido ed economico, se una partita di lo metallico è buona per costruire molle?
Forse sembrerà una questione banale, ma in questo caso si sottovaluta l'importanza delle molle.
Queste componenti devono essere estremamente precise e si trovano ovunque. I motori delle auto
contengono dalle otto alle trentadue molle, ad esempio. In particolare, l'airbag che può rivelarsi
fondamentale in un incidente, non è altro che una pallina in bilico su delle molle, che, come detto,
devono essere estremamente precise.
1.6.
UN'APPLICAZIONE INDUSTRIALE DEL CAOS
11
È dunque necessario, per il produttore di molle, controllarne la qualità. Ci vuole molto tempo
di un operatore esperto per regolare la macchina avvolgitrice che produce queste componenti.
Di solito, ci vogliono dalle quattro alle sei ore, utilizzando regolatori computerizzati. In pratica,
l'operatore produce alcune molle di prova e poi le immette nell'intero processo di produzione.
Dopodiché, queste vengono sottoposte a test statistici che ne vericano la qualità. In caso di
fallimento del test, le possibilità sono due: o la macchina avvolgitrice è stata regolata in maniera
sbagliata oppure la partita di lo con cui sono state prodotte le molle è scarsa. Il processo viene
quindi ripetuto e ci possono volere no a 12 ore prima che l'operatore si convinca che la causa
risiede nella qualità del lo.
Il costruttore di molle deve quindi far ritirare al fornitore il lo. Sarebbe di gran lunga meglio,
sia per il fornitore che per il produttore, sapere in anticipo se un lo sia buono o non. Questo
problema implica grandi costi in termini di denaro, burocrazia e tempo.
Come soluzione, la SRAMA (Spring Research and Manufacturers' Association) mise a punto
un test eciente per vericare l'avvolgibilità: il campione di lo veniva forzato ad avvolgersi
intorno a una barra metallica, o mandrino. Questo processo non può essere usato per produrre
molle perché è troppo lento, ma è utile per produrre molle di prova.
A questo punto si può misurare il passo della molla, ossia la distanza tra le spire, grazie a un
micrometro laser. Alcuni esperimenti mostrano infatti che li con buona avvolgibilità producono
molle di prova con spire regolari, mentre li con cattiva avvolgibilità producono molle di prova
con spaziature irregolari.
Tuttavia, questa soluzione si rivelò un fallimento: si capì che non contava solo la statistica delle
spaziature, ma anche l'ordine in cui queste si presentavano.
Chiariamo il concetto: diciamo che una spira è grassa (G) se è un po' più ampia di come dovrebbe
essere e magra (M) se è più stretta. Un lo che genera spire successive come: G M G M G M G
M G M G M avrà una buona avvolgibilità, perché gli errori tendono a eliminarsi. Al contrario,
un lo che dà origine a spire M M M M G M M G G G G G avrà una cattiva avvolgibilità,
nonostante le quantità di M e G siano uguali all'esempio precedente.
Si comprese dunque che la chiave del problema era la variabilità sequenziale delle proprietà
materiali del lo, non la variabilità statistica. Rimane quindi da quanticare questa proprietà.
A questo punto si rende necessaria una digressione sul metodo di ricostruzione dello spazio
delle fasi Ruelle-Takens. L'origine di questo metodo si deve all'obiettivo di rendere falsicabile
la teoria topologica della turbolenza. Si tratta di ricostruire la forma dell'attrattore a partire da
una serie di osservazioni, indipendentemente dalla quantità osservata.
Una sequenza di osservazioni sperimentali produce una serie temporale, ossia un elenco di numeri
che rappresentano il valore della quantità osservata a intervalli di tempo regolari. Il problema
consiste nel fatto che prendendo in considerazione, ad esempio, un attrattore nello spazio tridimensionale, abbiamo a disposizione osservazioni che ci danno una sola quantità. Occorrono
quindi informazioni da tre direzioni diverse.
Per farla breve, con questo metodo si riuscì a ricavare due false serie temporali a partire dalla
serie che si conosceva.
Si ottiene dunque un metodo di calcolo per ricostruire la topologia dell'attrattore a partire da
una singola serie temporale.
Tornando alla nostra applicazione industriale, gli ingegneri della SRAMA notarono che la sequenza di spaziatura delle molle è proprio una serie temporale. Si eettuò quindi la ricostruzione
dello spazio delle fasi con il metodo Ruelle-Takens. L'attrattore che ne risulta assomiglia a una
macchia ellittica. Se quella macchia era ben compatta, allora il lo era buono, in caso contrario
12
CAPITOLO 1. ARMONIA E DISSONANZA
Figura 1.5:
A sinistra, serie temporali di separazioni tra spire. A destra, attrattori ricostruiti a partire
da queste serie. Entrambe le molle vengono classicate a livello molto buono.
il lo era cattivo (processo illustrato nella gura 1.5).
Non importa dunque se la serie sia caotica, questo metodo funziona comunque. Si vede quindi
come una tecnica matematica nata per la sica del caos possa essere applicata in campo ingegneristico.
Ciò che si ottenne è dunque la macchina FRACMAT, che produce dapprima una molla di
prova su un mandrino, dopodiché misura la spaziatura delle spire con un micrometro laser e
inne il computer ricostruisce l'attrattore e traccia i risultati sul diagramma di classicazione. Il
test completo impiega solo tre minuti e permette di risparmiare molto denaro.
Capitolo 2
Mappe caotiche
2.1
Sistemi dinamici
Un sistema dinamico è una coppia (Γ, τ ) in cui:
• Γ è l'insieme dei possibili stati del sistema, rappresentati da una o più variabili reali;
• τ è una legge deterministica (cioè non aleatoria) che determina univocamente lo stato
presente, se si conosce lo stato iniziale.
L'obiettivo è quello di studiare il comportamento dello stato quando il parametro di evoluzione
temporale tende all'innito. Qui ci occuperemo soltanto del caso in cui questo parametro è discreto.
Alcune soluzioni semplici sono:
• per n che tende all'innito, xn tende a una soluzione costante: si parla di punto sso;
• per n che tende all'innito, xn tende a una soluzione periodica: si parla di orbita periodica,
ossia un insieme di punti periodici.
Ciononostante, i sistemi dinamici non lineari (quelli in cui f non è lineare) spesso hanno
soluzioni più complicate: in questi casi si parla di sistemi dinamici caotici . La caratteristica di
questi sistemi dinamici è un'estrema complessità nelle soluzioni. Quando vengono rappresentate
geometricamente, queste ultime possono presentare anche le caratteristiche della geometria frattale.
2.2
Descrizione matematica delle mappe unidimensionali
2.2.1 Denizione
Una mappa unidimensionale è un'applicazione denita da un'equazione ricorsiva del tipo
xn+1 = f (xn )
n = 0, 1, 2, ...
dove xn ∈ Γcon Γ ⊂ R e f : Γ → Γ. Si ha quindi che x e f (x) appartengono allo stesso
sottoinsieme di R.
Per convenzione notiamo f n (x0 ) = f ◦ f ◦ · · · ◦ f (x0 ) l'operazione di n composizioni della
|
{z
}
funzione f con sé stessa. L'insieme
n volte
O(x0 ) = {x0 , f (x0 ), f 2 (x0 ), ...}
13
14
CAPITOLO 2. MAPPE CAOTICHE
è detto orbita di x0 rispetto alla mappa f . Il punto iniziale x0 è detto condizione iniziale.
2.2.2 Punti ssi
Un punto x∗ , tale che f (x∗ ) = x∗ , è detto punto sso della mappa. Si classicano i punti ssi
come segue:
• Un punto sso x∗ è detto punto sso attrattivo, se, per dei punti vicini a x∗ , l'evoluzione
temporale porta questi punti a convergere su x∗ . Matematicamente signica che esiste un
ε > 0 tale che |f n (y) − x∗ | < ε per ogni y ∈ B(x∗ , ε) =]x∗ − ε, x∗ + ε[ con y 6= x;
• Un punto sso x∗ è detto punto sso repulsivo, se, per dei punti vicini a x∗ , l'evoluzione
temporale porta questi punti a divergere da x∗ . Matematicamente signica che esiste un
ε > 0 e un n0 ∈ N tali che per n > n0 si ha |f n (y) − x∗ | > ε per ogni y ∈ B(x∗ , ε) con
y 6= x.
Se f è di classe C 1 , è possibile dedurre la natura dei punti ssi con il risultato seguente. Sia x∗
un punto sso della mappa f , allora:
• Se |f 0 (x∗ )| < 1, x∗ è un punto sso attrattivo;
• Se |f 0 (x∗ )| > 1, x∗ è un punto sso repulsivo.
Questo risultato segue dalla linearizzazione della mappa attorno al punto sso: si pone xn =
x∗ + yn e poi si scrive il primo termine dello sviluppo limitato
lin
x∗ + y
= f (x∗ + yn ) = f (x∗ ) + f 0 (x∗ )yn
| {z }
| {z n+1}
xn+1
xn
⇔
yn+1 = f 0 (x∗ )yn
quindi, in un intorno del punto sso, si ha
yn = [f 0 (x∗ )]n y0
da cui |yn | → 0 se |f 0 (x∗ )| < 1 e quindi xn → x∗ ; mentre |yn | → ∞ se |f 0 (x∗ )| > 1 e quindi
xn → ∞.
2.2.3 Punti periodici
Un punto p tale che f k (p) = p, con k il più piccolo numero intero positivo, è detto punto
periodico di periodo k . L'orbita di un punto del genere è O(p) = {p, f (p), f 2 (p), · · · , f k−1 (p)} ed
è chiamata orbita di periodok .
Per classicare la natura delle orbite periodiche, si considerano i punti periodici p come punti
ssi di f k . Sia p1 = p, p2 = f (p1 ), · · · , pk = f (pk−1 ), allora
(f k )0 (p) = f 0 (pk )f 0 (pk−1 ) · · · f 0 (p1 )
e quindi si ottiene il risultato seguente: se f è una mappa di classe C 1 e {p1 , p2 , ..., pk } un'orbita
di periodo k di f , allora:
• Se |f 0 (pk )f 0 (pk−1 ) · · · f 0 (p1 )| < 1, l'orbita periodica è attrattiva;
• Se |f 0 (pk )f 0 (pk−1 ) · · · f 0 (p1 )| > 1, l'orbita periodica è repulsiva.
Si noti che la stabilità di qualsiasi punto di un'orbita periodica, visto come punto sso di f k , è
identica a quella di tutti gli altri, poiché (f k )0 (p1 ) = (f k )0 (p2 ) = · · · = (f k )0 (pk ). Tutti i punti
sono o attrattivi o repulsivi.
2.3.
2.3
DESCRIZIONE MATEMATICA DELLE MAPPE BIDIMENSIONALI
15
Descrizione matematica delle mappe bidimensionali
2.3.1 Denizione
Una mappa bidimensionale è un'applicazione denita da un'equazione ricorsiva del tipo
xn+1 = f(xn )
n = 0, 1, 2, ...
dove xn ∈ Γ con Γ ⊂ R2 e f : Γ → Γ. Siha quindi che x e f(x) appartengono allo stesso
x
fx
sottoinsieme di R2 . Notiamo x =
ef=
.
y
fy
Per convenzione scriveremo fn (x0 ) = f ◦ f ◦ · · · ◦ f(x0 ). L'insieme
|
{z
}
n volte
O(x0 ) = {x0 , f(x0 ), f2 (x0 ), ...}
è detto orbita di x0 rispetto alla mappa f. Il punto iniziale x0 è chiamato condizione iniziale.
Un sistema dinamico è detto conservativo se la mappa f preserva le aree nello spazio delle
fasi. Se, invece, vi è contrazione, il sistema dinamico è denito dissipativo. Si può dimostrare che
un sistema è conservativo se
| det Df(x)| = 1
è dissipativo nel caso
| det Df(x)| < 1
dove Df è la matrice di Jacobi (vedere sezione 2.3.2).
y
fn
A0
An
x
Figura 2.1:
Nei sistemi dinamici dissipativi, l'area nello spazio delle fasi subisce una contrazione sotto
l'azione dell'iterazione della mappa.
2.3.2 Punti ssi
Un punto x∗ tale che f(x∗ ) = x∗ è detto punto sso della mappa. Si classicano i punti ssi come
segue:
• Un punto sso x∗ è detto punto sso attrattivo se, per dei punti vicini a x∗ , l'evoluzione
temporale porta questi punti a convergere su x∗ . Matematicamente signica che esiste un
ε > 0 tale che ||fn (y) − x∗ || < ε per ogni y ∈ B(x∗ , ε);
• Un punto sso x∗ è detto punto sso repulsivo se, per dei punti vicini a x∗ , l'evoluzione
temporale porta questi punti a divergere da x∗ . Matematicamente signica che esiste un
ε > 0 e n0 ∈ N tale che per n > n0 si ha ||fn (y) − x∗ || > ε per ogni y ∈ B(x∗ , ε) con
y 6= x∗ .
16
CAPITOLO 2. MAPPE CAOTICHE
In modo analogo al caso della mappa unidimensionale, se f è di classe C 1 , allora è possibile
dedurre la natura dei punti ssi analizzando l'approssimazione lineare della mappa attorno al
punto sso x∗ : si pone xn = x∗ + yn e poi si scrive il primo termine dello sviluppo limitato
x∗ + yn+1 = f(x∗ + yn ) lin
= f(x∗ ) + [Df(x∗ )]yn
|
{z
xn+1
}
yn+1 = [Df(x∗ )]yn
⇔
| {z }
xn
quindi, in un intorno del punto di equilibrio, si ha
yn = [Df(x∗ )]n y0
La matrice Df(x∗ ) è chiamata matrice di Jacobi1 e rappresenta l'approssimazione lineare della
funzione f vicino al punto x∗ . Vediamo ora come trovare l'espressione esplicita di questa matrice.
Sia h ∈ R2 una piccola variazione rispetto al punto sso.
f(x + h) =
∗
fx (x∗ + h)
fy (x∗ + h)
Considerando l'approssimazione lineare delle funzioni fx e fy , abbiamo
fx (x∗ + h) = fx (x∗ ) + ∇fx (x∗ ) · h = fx (x∗ ) +
∂fx ∗
∂fx ∗
(x )hx +
(x )hy
∂x
∂y
fy (x∗ + h) = fy (x∗ ) + ∇fy (x∗ ) · h = fy (x∗ ) +
∂fy ∗
∂fy ∗
(x )hx +
(x )hy
∂x
∂y
lin
lin
e quindi
f(x + h) = f(x ) +
∗
lin
∗
∂fx
∗
∂x (x )
∂fy
∗
∂x (x )
∂fx
∗
∂y (x )
∂fy
∗
∂y (x )
!
hx
hy
= f(x∗ ) + Df(x∗ )h
dunque, la matrice Df(x∗ ) vale:
Df(x ) =
∗
∂fx
∗
∂x (x )
∂fy
∗
∂x (x )
∂fx
∗
∂y (x )
∂fy
∗
∂y (x )
!
Indichiamo λ1 e λ2 gli autovalori di Df(x∗ ), che si ottengono risolvendo l'equazione
det(Df(x∗ ) − λI2 ) = 0.
Si noti che, essendo la matrice Df(x∗ ) reale, gli autovalori sono o reali o coppie di numeri complessi
coniugati. Nel caso di autovalori distinti, si ha la seguente classicazione dei punti ssi:
• Se |λ1 | < 1 e |λ2 | < 1 allora x∗ è un punto sso attrattivo;
• Se |λ1 | > 1 e |λ2 | > 1 allora x∗ è un punto sso repulsivo;
• Se |λ1 | < 1 e |λ2 | > 1 (o viceversa) allora x∗ è un punto sso repulsivo iperbolico.
1
Il nome si deve a Carl Gustav Jacob Jacobi (1804-1851), matematico tedesco che contribuì notevolmente allo
sviluppo dell'analisi matematica.
2.4.
IL CAOS NELLE MAPPE
17
Negli esempi che verranno sviluppati nelle sezioni 3.2, 3.3 e 3.4 si tratterà proprio di mappe
con punti ssi repulsivi iperbolici.
Per capire questo comportamento è suciente considerare che y può essere scritto come combinazione lineare degli autovettorie1 ed e2 di Df(x∗ )
yn = Re
X
cαn eα
e
yn+1 = Re
X
α
cαn+1 eα
α
α
e quindi, poiché yn+1 = [Df(x)]y ed eα sono autovettori di Df(x), si ha cα
n+1 = λα cn , con
∗
α = 1, 2. Nel caso di punti ssi attrattivi, si ha ||yn || → 0 e quindi xn → x ; mentre, nel caso di
punti ssi repulsivi, si ha ||yn || → ∞ e quindi ||xn || → ∞. Nel caso, invece, di punti ssi repulsivi
iperbolici, si ottiene |c1n | → 0 e |c2n | → ∞, ossia ||yn || → ∞ e quindi ||xn || → ∞.
2.3.3 Punti periodici
Un punto p tale che fk (p) = p, con k il più piccolo numero intero positivo, è detto punto periodico
di periodo k . L'orbita di un punto del genere è O(p) = {p, f(p), f2 (p), ..., fk−1 (p)} ed è chiamata
orbita di periodo k .
Per classicare la natura delle orbite periodiche, si considerano i punti periodici p come punti
ssi di fk . Sia p1 = p, p2 = f(p1 ), ..., pk = f(pk−1 ). Allora
Dfk (p) = Df(pk )Df(pk−1 )...Df(p1 )
e quindi si ottiene il risultato seguente: se f è una mappa di classe C 1 e {p, p1 , p2 , ..., pk } un'orbita
di periodo k di f, allora, dati gli autovalori λ1 e λ2 di Dfk (p), si ha:
• Se |λ1 | < 1 e |λ2 | < 1, allora l'orbita periodica è attrattiva;
• Se |λ1 | > 1 e |λ2 | > 1, allora l'orbita periodica è repulsiva;
• Se |λ1 | < 1 e |λ2 | > 1 (o viceversa), allora l'orbita periodica è repulsiva iperbolica.
Si noti che la stabilità di qualsiasi punto di un'orbita periodica, visto come punto sso di fk ,
è identica a quella di tutti gli altri, poiché Dfk (p1 ) = Dfk (p2 ) = ... = Dfk (pk ). Tutti i punti o
sono attrattivi o sono repulsivi.
2.4
Il caos nelle mappe
In questa sezione illustreremo le tre proprietà che presenta una mappa detta caotica. La denizione di caoticità, nel caso di mappe bidimensionali, dierisce di poco da quella del caso
unidimensionale, per questo riporteremo una sola denizione che verrà poi adattata per entrambi i casi.
Nel capitolo 3, verranno presentati quattro esempi di mappe caotiche, in cui evidenzieremo
le tre proprietà del caos che sono qui denite.
18
CAPITOLO 2. MAPPE CAOTICHE
2.4.1 Le tre proprietà del caos
Una mappa f è denita caotica secondo Devaney2 se esiste un sottoinsieme compatto, ossia
limitato e chiuso, ed invariante A (cioè f (A) ⊆ A) dello spazio delle fasi per il quale valgono le
seguenti proprietà quando f è ristretta ad A:
•
Sensibilità : f è sensibile alle condizioni iniziali e le sue orbite sono imprevedibili. Ciò si
•
Transitività : f è topologicamente transitiva. Ciò signica che, per ogni coppia di sottoin-
•
Densità : esiste un insieme di orbite periodiche denso in A.
verica quando un esponente di Ljapunov è positivo (si veda la sezione 2.3.2 e 2.3.3). Nel
caso delle mappe unidimensionali, quando l'unico esponente di Ljapunov è positivo;
sieme aperti U e V di A, esiste n ∈ N tale che f n (U ) ∩ V 6= ∅. Oppure esiste x0 ∈ A tale
che l'orbita O(x0 ) è densa in A. In altre parole, l'orbita di x0 deve passare innitamente
vicino a tutti i punti di A;
Per completezza riportiamo qui di seguito i due criteri di densità che utilizzeremo nel capitolo
3. Si dice che A è denso in Γ se:
• Per ogni ε > 0 e per ogni x ∈ Γ esiste un punto p ∈ A tale che |x − p| < ε.
• I punti di A appartengono a Q ∩ Γ.
• Per ogni x ∈ Γ esiste una successione an di elementi di A tale che an → x.
L'idea di Devaney è che queste proprietà caratterizzano la caoticità come combinazione di tre
elementi: l'imprevedibilità delle orbite, dovuta alla dipendenza sensibile dalla condizione iniziale,
l'indecomponibilità di una parte dello spazio delle fasi in sottoinsiemi separati dalla dinamica e,
per nire, un tocco di regolarità dovuto all'esistenza di un insieme denso di orbite periodiche. La
transitività corrisponde al fatto che qualsiasi sottoinsieme aperto U , inizialmente disgiunto da
V , nisce in V durante l'evoluzione temporale, cioè vi è un completo mescolamento delle regioni
dello spazio delle fasi durante l'evoluzione.
U
V
fn
f n(U )
Figura 2.2:
Illustrazione della proprietà della transitività.
L'insieme A della denizione appena riportata è chiamato attrattore strano o attrattore caotico ed è caratterizzato da una grande complessità, a dierenza degli attrattori corrispondenti ai
2
Bob Devaney è uno dei più importanti matematici viventi. Questo professore americano ha pubblicato 14 libri
sul tema dei sistemi dinamici ed è l'autore di innumerevoli ricerche in questo campo. Attualmente è il presidente
della Mathematical Association of America.
2.4.
IL CAOS NELLE MAPPE
19
punti ssi e alle orbite periodiche (si veda la sezione 2.3.4). Questo concetto è, appunto, caratteristico dei sistemi dinamici caotici.
Spesso, ma non sempre, gli attrattori strani dal punto di vista geometrico presentano delle
caratteristiche della geometria frattale. Questo fenomeno è dovuto alla dissipazione che contrae le lunghezze nello spazio delle fasi. Tuttavia, non vi sono punti isolati. Un ottimo esempio di
matematica frattale applicata al campo dei sistemi dinamici caotici è presentato nella sezione 3.4.
Da notare che possono esserci degli attrattori che non sono caotici ma che hanno una geometria frattale e, dall'altro lato, degli attrattori caotici senza caratteristiche frattali, come si vedrà
nei primi esempi illustrati nel capitolo 3. La scelta di chiamare strani gli attrattori caotici e non
quelli frattali deriva dal fatto che la stranezza si riferisce alla dinamica sull'attrattore e non alle
sue caratteristiche geometriche.
2.4.2 Sensibilità nel caso unidimensionale
Un concetto importante nella teoria del caos è la sensibilità alle condizioni iniziali. L'argomento è
già stato esposto in maniera qualitativa nella sezione 1.4. Nel caso di una mappa unidimensionale,
partendo da due condizioni iniziali x0 e x̃0 molto vicine, le rispettive orbite
O(x0 ) = {x0 , f (x0 ), f 2 (x0 ), ...}
e
O(x̃0 ) = {x̃0 , f (x̃0 ), f 2 (x̃0 ), ...}
non restano vicine. Più precisamente, per f : Γ → Γ continua, date due condizioni iniziali x0 e
x̃0 che per ogni ε > 0 soddisfano |x0 − x̃0 | < ε, esiste un n ∈ N e una costante d > 0 tale che
|f n (x0 ) − f n (x̃0 )| > d.
x
x̃0
x0
δxn
n
Figura 2.3:
Evoluzione temporale nel caso unidimensionale per due punti vicini.
Useremo l'esempio di un tavolo da biliardo per creare analogie con questo concetto applicato
alle mappe. Immaginiamo di avere un tavolo da biliardo su cui ci sono sparpagliate delle palle
immobili. Trascuriamo inoltre l'attrito. Poso una palla gialla in un certo punto del tavolo, dopodiché la colpisco con la stecca e disegno il suo percorso, determinato dai rimbalzi con le altre palle
e le sponde. In seguito, prendo una palla blu che posiziono quasi esattamente dove avevo messo
quella gialla e la colpisco con lo stesso angolo, la stessa forza e nello stesso punto di quanto avevo
fatto con la pallina gialla. Ciò che si nota è che la palla blu segue in un primo momento quasi
esattamente il percorso tracciato da quella gialla. Poi, però, la sua traiettoria devia totalmente
da quella dell'altra palla e prende una strada tutta sua.
20
CAPITOLO 2. MAPPE CAOTICHE
Tornando ai numeri, è possibile quanticare la sensibilità alle condizioni iniziali grazie a una
grandezza particolarmente utile che è l'esponente di Ljapunov3 . Questo valore è denito nel
modo seguente: sia x1 = f (x0 ), x2 = f (x1 ),... e l'orbita di x0 data da O(x0 ) = {x0 , x1 , x2 , ...},
se f 0 (xn ) 6= 0 per ogni n e il limite seguente esiste
L(f, x0 ) = lim |f 0 (xn−1 ) · · · f 0 (x1 )f 0 (x0 )|1/n
n→∞
l'esponente di Ljapunov della mappa f è dato da
Λ(f, x0 ) = ln L(f, x0 ) = lim ln |f 0 (xn−1 ) · · · f 0 (x1 )f 0 (x0 )|1/n .
n→∞
Gli esponenti di Ljapunov possono essere interpretati nel modo seguente: date due condizioni
iniziali x0 e x̃0 , con x0 ≈ x̃0 e δx0 = x̃0 − x0 ,
x̃1 = f (x̃0 ) ≈ f (x0 ) + f 0 (x0 )δx0 = x1 + f 0 (x0 )δx0
⇒ δx1 = x̃1 − x1 = f 0 (x0 )δx0
0
0
0
x2 = f (x̃1 ) ≈ f (x1 ) + f (x1 )δx1 = x1 + f (x1 )f (x0 )δx0
⇒ δx2 = x̃2 − x2 = f 0 (x1 )f 0 (x0 )δx0
e in generale
δxn−1 = x̃n−1 − xn−1 ≈ f 0 (xn−1 ) · · · f 0 (x1 )f 0 (x0 )δx0
da cui L ≈ | δxδxn−1
|1/n e quindi, con Λ = ln L,
0
|δxn−1 | ≈ |δx0 |eΛn
le due orbite si allontanano in modo esponenziale se Λ > 0.
L'errore, ossia la dierenza tra le condizioni iniziali x0 e x̃0 , possiede una velocità di crescita
pari a eΛ . Ad esempio, se Λ = 2,302 6 il fattore di crescita vale 10. Ciò signica che se la dierenza
tra le due condizioni iniziali è di 0,000 01, dopo 6 iterazioni della mappa, la dierenza tra le due
orbite sarà di 10.
2.4.3 Sensibilità nel caso bidimensionale
In modo analogo al caso unidimensionale, anche nelle mappe bidimensionali, partendo da due
condizioni iniziali x0 e x̃0 molto vicine, le rispettive orbite
O(xa ) = {x0 , f(x0 ), f2 (x0 ), ...}
e
O(x̃0 ) = {x̃0 , f(x̃0 ), f2 (x̃0 ), ...}
non restano vicine. Più precisamente, per f : Γ → Γ continua, date due condizioni iniziali x0 e
x̃0 che per ogni ε > 0 soddisfano ||x0 − x̃0 || < ε, esiste un n ∈ N e una costante d > 0 tale che
||fn (x0 ) − fn (x̃0 )|| > d.
Gli esponenti di Ljapunov per le mappe bidimensionali si calcolano in un modo dierente
rispetto ai casi unidimensionali, ossia grazie alla matrice di Jacobi, notata Df(x). Sia x1 = f(x0 ),
x2 = f(x1 ),... e l'orbita di x0 data da O(x0 ) = {x0 , x1 , x2 , ...}, se Df(xn ) 6= 0 per ogni n poniamo
la matrice
Vn = Df(xn−1 ) · · · Df(x1 )Df(x0 ).
Gli esponenti di Ljapunov della mappa f sono deniti uguali agli autovalori Λ1 > Λ2 della matrice
Λ = lim ln(Vnt Vn )1/2n .
n→∞
3
Aleksandr Ljapunov (1857-1918) è stato un matematico e sico russo. Fu un professore molto apprezzato,
nonostante la sua giovane età, e sviluppò ricerche fondamentali per la matematica del XX secolo. Il 31 ottobre
1918 sua moglie morì e lo stesso giorno Ljapunov si sparò.
2.5.
DESCRIZIONE MATEMATICA DELL'ATTRATTORE
21
y
δxn
x̃0
x0
x
Figura 2.4:
Evoluzione temporale nel caso bidimensionale per due punti vicini.
Come nel caso precedente, gli esponenti di Ljapunov possono essere interpretati nel modo
seguente: date due condizioni iniziali x0 e x̃0 , con x0 ≈ x̃0 e δ x0 = x̃0 − x0 ,
x̃1 = f (x̃0 ) ≈ f(x0 ) + Df(x0 )δ x0 = x1 + Df(x0 )δ x0
x2 = f(x̃1 ) ≈ f(x1 )+Df(x1 )δ x1 = x1 +Df(x1 )Df(x0 )δ x0
⇒ δ x1 = x̃1 − x1 = Df(x0 )δ x0
⇒ δ x2 = x̃2 −x2 = Df(x1 )Df(x0 )δ x0
e in generale
δ xn−1 = x̃n−1 − xn−1 ≈ Df(xn−1 ) · · · Df(x1 )Df(x0 )δ x0 = Vn δ x0
da cui
||δ xn−1 ||2 = ||Vn δ x0 ||2 = hVn δ x0 , Vn δ x0 i
Siano A e B due matrici dello stesso ordine. A è detta aggiunta di B se hAx, yi = hx, B yi
per ogni x, y. Per matrici reali, la matrice aggiunta vale A = B t . Nel nostro caso, la matrice
aggiunta di Vn è Vnt . Sfruttiamo questa proprietà e otteniamo
hVn δ x0 , Vn δ x0 i = hδ x0 , Vnt Vn δ x0 i.
Esprimendo i vettori δ xn−1 e δ x0 rispetto alla base degli autovettori di Vnt Vn di autovalori
positivi v1 > v2 , ne risulta
||δ xn−1 ||2 =
da cui
√ < ||δxn−1 ||
v1 ≈ ||δx0 ||
X
(cαn−1 )2 ≈
X
α
α
1/2n
e quindi, con Λ1 = ln v1
vα (cα0 )2 > v1 ||δ x0 ||2
,
>
||δ xn−1 || ≈ ||δ x0 ||eΛ1 n
le due orbite si allontanano esponenzialmente se Λ1 > 0.
Come è stato detto per il caso unidimensionale, la dierenza tra le due condizioni iniziali x0
e x̃0 cresce di un fattore pari eΛ1 per ogni iterazione della mappa.
2.5
Descrizione matematica dell'attrattore
Una struttura rilevante per la teoria del caos è l'attrattore, anche detto insieme limite. La denizione di attrattore nel caso bidimensionale è identica a quella del caso unidimensionale, salvo
22
CAPITOLO 2. MAPPE CAOTICHE
il fatto che f e x sono deniti in R2 anziché in R. Per questo, riporteremo una sola denizione,
usando la notazione del caso bidimensionale.
Un attrattore è un sottoinsieme A dello spazio delle fasi per il quale valgono le seguenti tre
proprietà:
• Esiste un intorno aperto di A, detto bacino di attrazione e notato BA , i cui punti nel limite
n → ∞ tendono ad A;
• Il sottoinsieme è invariante rispetto alla dinamica, ossia se x ∈ A, allora fn (x) ∈ A per ogni
n;
• Non esistono sottoinsiemi A0 ( A (diversi da ∅) che possiedono le prime due proprietà.
BA
A
Figura 2.5:
Attrattore A e bacino di attrazione BA .
L'ultima precisazione è essenziale, perché un sistema dinamico può avere più di un attrattore,
ciascuno col proprio bacino di attrazione.
Una proprietà importante degli esponenti di Ljapunov Λα (f, x0 ) è l'indipendenza dalla condizione iniziale x0 per tutti gli x0 che appartengono allo stesso bacino di attrazione.
Finora abbiamo trattato tre tipi di attrattori: i punti ssi, le orbite periodiche e gli attrattori
strani. Tralasciamo ora il caso degli attrattori strani, presentato nella sezione 2.4.1, e consideriamo
gli altri due. Sia f una mappa, allora:
• Dato un punto sso attrattivo x∗ , l'attrattore è A = {x∗ }. Il bacino di attrazione di A è
l'insieme dei punti y tali che
nel caso unidimensionale, |f n (y) − x∗ | → 0 per n → ∞;
nel caso bidimensionale, ||fn (y) − x∗ || → 0 per n → ∞.
• Data un'orbita periodica attrattiva {p1 , p2 , ..., pk }, l'attrattore è A = {p1 , p2 , ..., pk } e il
bacino di attrazione di A è l'insieme dei punti y tali che fn (y) ∈ A per n → ∞. Si osservi
che in questo caso il limite limn→∞ xn non esiste.
In questi due casi non vi è nessuna sensibilità alle condizioni iniziali.
L'origine di un attrattore è la dissipazione, che genera una contrazione della lunghezza e
porta a convergere verso A tutti i punti del suo bacino di attrazione.
Capitolo 3
Esempi di mappe caotiche
3.1
La mappa diadica
Il primo esempio di sistema dinamico caotico, che analizziamo in questo lavoro di maturità,
consiste nella mappa unidimensionale chiamata mappa diadica. Di seguito studieremo le sue
proprietà, utilizzando i concetti che sono stati esposti nel capitolo precedente. Questa mappa è
denita nel modo seguente:
d : [0, 1] → [0, 1]
2x
se
x < 21
x 7→ 2x (mod1) =
2x − 1
se
x ≥ 12
1
d(x)
0
0
Figura 3.1:
1
x
Rappresentazione graca della funzione d(x).
Dal graco della funzione d(x) si nota che la funzione d è non lineare. Ci possiamo quindi
attendere dei comportamenti tipici dei sistemi dinamici caotici.
Per prima cosa, studiamo i punti ssi. Risolvendo una semplice equazione si trova che
d(0) = 0 e che d(1) = 1. Siccome alla mappa è applicata l'operazione modulo 1, si tratta dello
stesso punto.
È possibile dedurre la natura di questo punto sso calcolando |d0 (0)|. Il risultato è 2, che è strettamente maggiore di 1, di conseguenza capiamo che si tratta di un punto sso repulsivo.
La gura 3.2 mostra l'orbita di un punto vicino al nostro punto sso. Sull'asse delle ascisse
sono espresse il numero di iterazioni applicate alla condizione iniziale, mentre su quello delle
ordinate è indicato il valore della condizione iniziale dopo le corrispondenti iterazioni. Notiamo
che l'evoluzione temporale porta la condizione iniziale, vicina a 0, a divergere dal punto sso.
23
24
CAPITOLO 3. ESEMPI DI MAPPE CAOTICHE
Figura 3.2:
Orbita di 0,002 rispetto alla mappa d realizzata con GeoGebra.
Studiamo ora le orbite di periodo due. In primo luogo, occorre trovare la funzione d2 (x):
d2 : [0, 1] → [0, 1]
4x
4x − 1
x 7→
4x
−2
4x − 3
se
se
se
se
x < 1/4
1/4 ≤ x < 1/2
1/2 ≤ x < 3/4
3/4 < x
I punti ssi di d2 (x) sono d2 (0) = 0, d2 ( 31 ) = 31 , d2 ( 23 ) = 23 . Esplicitiamo le orbite dei punti 1/3
e 2/3:
1
1 2 1 2
2
2 1 2 1
O
=
, , , , ...
O
=
, , , , ...
3
3 3 3 3
3
3 3 3 3
1
3
Essendo le due orbite uguali, vi è un'unica orbita di periodo due, che comprende gli elementi
e 23 .
Figura 3.3:
Orbita periodica O
1
3
di periodo due realizzata con GeoGebra.
Come mostrato
in
precedenza, è possibile classicare la natura di quest'orbita periodica calcolando |f 0 13 f 0 32 | = 16. Siccome questo valore è strettamente maggiore di 1, possiamo
concludere che quest'orbita è periodica repulsiva. Ne deduciamo che entrambi i punti sono repulsivi.
Si giunge ora alla questione principale: questa mappa è caotica? Per rispondere a questa
domanda, occorre dimostrare che la mappa d possiede le tre proprietà del caos.
3.1.
LA MAPPA DIADICA
25
La prima proprietà del caos è la sensibilità alle condizioni iniziali. Per vericarla, calcoliamo l'esponente di Ljapunov come mostrato nella sezione 2.3.2:
Λ(d, x0 ) = lim ln |2n |1/n = ln 2.
n→∞
Siccome l'esponente di Ljapunov è positivo, si deduce che la mappa possiede la proprietà della
sensibilità alle condizioni iniziali.
Questo fatto si può riscontrare facilmente nel graco dell'evoluzione temporale della gura
3.4. Il graco rosso mostra l'orbita del punto x0 = 0,724, mentre quello verde descrive l'orbita
del punto x̃0 = 0,722. Si osserva che, nonostante la dierenza tra le condizioni iniziali sia piccola,
solo per le prime iterazioni le orbite restano vicine, dopodiché prendono percorsi completamente
diversi. Lo stesso fenomeno si nota nella gura 3.2, in cui le orbite di 0 (punto sso) e di 0,02
non restano vicine per n grande.
Inoltre, questo graco può essere letto in riferimento all'esempio del biliardo, illustrato nella
sezione 2.3.1: su un tavolo da gioco ci sono due palline che partono molto vicine. Rimbalzano
sugli ostacoli negli stessi punti per le prime 3-4 volte, ma poi si separano, descrivendo traiettorie
molto dierenti.
Figura 3.4:
Orbita dei punti x0 = 0,724 (rosso) e x̃0 = 0,722 (verde) realizzata con GeoGebra.
La seconda proprietà è quella della transitività. La mappa diadica iterata più volte può
essere anche scritta come dn (x) = 2n x mod 1. Consideriamo la seguente proposizione:
Sia f una funzione continua nell'intervallo [a, b]. Allora f assume tutti i valori compresi tra
f (a) e f (b).
n
Sia K un sottoinsieme di [0, 1] della forma [ 2kn , k+1
2n ], con k = 0, 1, ..., 2 − 1. Utilizzando quen
st'ultima proposizione, possiamo dire che, siccome la mappa d (x) è continua in K , dn assumerà
tutti i valori compresi tra
k
k n
k+1 n
n
n k+1
d
= n 2 mod 1 = 0
e
d
=
2 mod 1 = 1.
2n
2
2n
2n
Siano I, J ⊂ [0, 1] due intervalli aperti con I ∩ J = ∅. Per un n ∈ N sucientemente grande
esiste un intervallo K della forma specicata qui sopra contenuto in J . Poiché dn (K) = [0, 1], si
ha dn (J) = [0, 1] e quindi dn (J) ∩ I 6= ∅.
26
CAPITOLO 3. ESEMPI DI MAPPE CAOTICHE
L'idea della dimostrazione è illustrata nella gura 3.5 attraverso dei diagrammi di Venn.
[0, 1]
J
I
K
dn (K)
I
Figura 3.5:
Per due intervalli aperti I, J tali che I ∩ J = ∅ si ottiene dn (J) ∩ I 6= ∅.
È stato quindi dimostrato che la mappa diadica possiede la proprietà della transitività.
Manca ancora il tocco di regolarità che consiste nella densità. A tal proposito, si osservino
i graci della gura 3.6 che mostrano le funzioni d(x), d2 (x) e d3 (x). La retta rossa tratteggiata
è invece la funzione d(x) = x. I punti di intersezione tra questa retta e i graci corrispondono ai
punti ssi delle tre funzioni e quindi ai punti di periodo k = 1, 2, 3 di d(x).
1
1
1
d2 (x)
d(x)
d3 (x)
0
0
0
1
x
Figura 3.6:
0
0
x
1
1
0
x
Graco della mappa diadica d(x), d2 (x) e d3 (x) nel quadrato [0, 1].
Si nota che il numero di punti ssi periodici aumenta ogni volta che la funzione d viene composta con sé stessa. Più precisamente, la funzione dk (x) possiede 2k punti ssi, distanti tra loro
1
. Quindi d ha 2k punti periodici di periodo compreso tra 1 e k , distanti tra loro 21k .
2k
Sia Op l'insieme di tutte le orbite periodiche e sia x ∈ [0, 1]. Per ogni ε > 0 esiste un punto
p ∈ Op tali che |x − p| < ε. Per quanto abbiamo appena detto sulla distanza tra i punti periodici,
possiamo porre ε = 21k , con k ∈ N. La distanza tra x e p sarà dunque innitamente piccola,
quindi l'insieme di tutte le orbite periodiche è denso in [0, 1].
Detto ciò, è stata vericata anche l'ultima proprietà del caos, quella della densità. Abbiamo
quindi dimostrato che questo è un sistema dinamico caotico.
3.1.
LA MAPPA DIADICA
27
Esprimeremo ora la mappa in base binaria. Ciò si rivelerà utile soprattutto nella sezione
3.2 per vericare le tre proprietà del caos nella mappa del panettiere.
Sia x ∈ [0, 1] un punto della mappa d. È possibile convertire il suo valore dalla base decimale
a quella binaria come mostrato qui:
x=
∞
X
an
n=1
ai ∈ {0; 1}
con
2n
e si scrive, in base binaria,
0, a1 a2 a3 ...an .
Possiamo subito osservare qualcosa di importante riguardo al termine a1 : questo valore, che
per essere convertito in base decimale deve essere moltiplicato per 12 , è
(1) a1 = 0 se x < 12 ;
(2) a1 = 1 se x ≥ 21 .
Convertiamo ora il valore di d(x) = 2x mod 1 in base binaria:
∞
X
an
2x =
2n−1
k=n−1
=
n=1
∞
X
ak+1
k=0
2k
= a1 +
∞
X
ak+1
k=1
2k
Resta da applicare l'operazione modulo 1:
(1) se x <
(2) se x ≥
a1 = 1.
1
2
non applichiamo nessuna ulteriore operazione;
1
2
dobbiamo sottrarre alla mappa 1, questa operazione toglie quindi il termine
Dunque, in ogni caso, il risultato nale è
d(x) = 2x mod 1 =
∞
X
ak+1
k=1
2k
,
in altre parole, se x = 0, a1 a2 ...an e d(x) = 0, a01 a02 ...a0n , otteniamo che a0i = ai+1 . Si può
di conseguenza aermare che, dopo ogni iterazione, i termini del punto x della mappa d espresso in base binaria traslano di una posizione verso sinistra. Ad esempio, d23 (x) = 0, a24 a25 a26 ...an .
È inne interessante notare che, dopo circa 55 iterazioni, l'orbita generata con GeoGebra di
un qualsiasi x0 ∈ [0, 1] si stabilizza sul punto x = 0, come si può osservare nella gura 3.7. Ciò
si deve al fatto che il programma, con cui è stato calcolato questo graco, funziona in base binaria. Abbiamo visto che ogni iterazione trasla di un posto verso sinistra le cifre della condizione
iniziale espressa in base binaria. Quando si inserisce, però, il valore della condizione iniziale nel
computer, non vengono considerati inniti termini dopo la virgola, ma solo i primi 55, dopodiché
è come se fossero tutti degli 0. Di conseguenza, il computer ottiene d56 (x) = 0,000 0....
Riassumendo, si conclude dunque che la mappa diadica è caotica secondo Devaney. Essa,
inoltre, ha come attrattore tutto l'insieme [0, 1].
28
CAPITOLO 3. ESEMPI DI MAPPE CAOTICHE
Figura 3.7:
3.2
Orbita del punto x0 = 0,56 realizzata con Geo Gebra.
La mappa del panettiere
La mappa del panettiere è un interessante esempio di sistema dinamico caotico bidimensionale.
Si tratta della mappa denita nel modo seguente:
f : [0, 1]2 → [0, 1]2
(x, y) 7→
(2x, y/2)
(2x − 1, (y + 1)/2)
se
se
x<
x≥
1
2
1
2
Anche questa mappa è non lineare.
Il suo nome è stato scelto perché le operazioni che applica sul quadrato [0, 1]2 ricordano ciò che
un panettiere fa impastando: prima spiana la pasta, poi la ripiega su se stessa.
Queste operazioni sono visibili nella gura 3.8, che rappresenta un quadrato [0, 1]2 su cui è applicata la mappa.
Figura 3.8:
Operazioni che la mappa applica al quadrato [0, 1]2 .
Notiamo immediatamente che vi è una contrazione nella direzione verticale e uno stiramento
in quella orizzontale.
La matrice di Jacobi della mappa f è data da
2
A = Df =
0
0
1
2
3.2.
LA MAPPA DEL PANETTIERE
29
per qualsiasi punto x ∈ [0, 1]2 . Notiamo inoltre che | det Df(x)| = 1, quindi questo sistema
dinamico è conservativo, ossia preserva le aree nello spazio delle fasi. Per i dettagli di quest'ultima
aermazione si veda la sezione 4.1.
I punti ssi della mappa, notati x∗ , sono f(0, 0) = (0, 0) e f(1, 1) = (1, 1). Gli autovalori,
che si trovano risolvendo l'equazione di secondo grado det(Df(x∗ ) − λI2 ) = 0, sono λ1 = 2 e
λ2 = 21 .
Siccome |λ1 | > 1 e |λ2 | < 1, entrambi i punti ssi sono repulsivi iperbolici. Ciò signica che, per
dei punti vicini a x∗ , l'evoluzione temporale porta questi punti a divergere da x∗ .
A questi due autovalori è possibile associare altrettanti autovettori. Sia λ l'autovalore della
matrice Df e sia v = (v1 , v2 ) l'autovettore associato all'autovalore λ. Per denizione, Df(x)v =
λv. Esplicitamente, in questo caso,
2
0
v1
v
=λ 1 .
1
0
v
v2
2
2
Risolvendo il sistema otteniamo il seguente risultato:
• (1, 0) è l'autovettore di dilatazione associato all'autovalore λ1 = 2. Questo risultato conferma il fatto che la mappa è uno stiramento nella direzione orizzontale;
• (0, 1) è l'autovettore di contrazione associato all'autovalore λ2 = 12 . Questo risultato
conferma il fatto che la mappa è una contrazione nella direzione verticale.
Per proseguire con l'analisi della mappa del panettiere, si rende utile esprimerla in base binaria,
analogamente a quanto fatto per la mappa diadica.
Sia x = (x, y) ∈ [0, 1]2 . È possibile esprimere questo punto in base binaria come mostrato
qui:
∞
X
an
x=
con
ai ∈ {0, 1}
2n
n=1
y=
∞
X
bn
2n
con
bi ∈ {0, 1}
n=1
e si scrive, in base binaria,
(x, y) = (0, a1 a2 a3 ...; 0, b1 b2 b3 ...).
Possiamo subito dire qualcosa riguardo ai termini a1 : questo valore, che per essere convertito
in base decimale deve essere moltiplicato per 1, è
(1) a1 = 0 quando x < 21 ;
(2) a1 = 1 quando x ≥ 21 .
Convertiamo ora in base binaria la funzione f(x) = (2x, y/2) tralasciando per il momento il
caso (2) in cui x ≥ 21
∞
X
an
2x =
2n−1
k=n−1
=
n=1
∞
X
ak+1
k=0
2k
∞
y X bn
=
2
2n+1
n=1
k=n+1
=
= a1 +
∞
X
ak+1
k=1
∞
X
bk−1
k=2
2k
2k
30
CAPITOLO 3. ESEMPI DI MAPPE CAOTICHE
Poiché nel caso (1) il termine a1 vale 0, questo scompare nel risultato nale.
Nel caso (2), invece, a1 = 1. Poi però, occorre sottrarre 1 per la variabile x, mentre per la variabile
y dobbiamo ricordarci che occorre aggiungere 21 .
Il risultato nale è dunque
(1)
f(x) =
∞
∞
X
ak+1 X ak−1
;
2k
2k
k=1
(2)
f(x) =
!
k=2
∞
∞
X
ak+1 X ak−1 1
;
+
2
2k
2k
k=1
!
k=2
In altre parole, se x = 0, a1 a2 ...an e fx (x) = 0, a01 a02 ...a0n , otteniamo che a0i = ai+1 . Mentre
per la variabile y , se y = 0, b1 b2 b3 ... e fy (x) = 0, b01 b02 b03 ..., otteniamo b0i = bi−1 e poniamo b01 = 0
nel caso (1) e b01 = 1 nel caso (2). Si può di conseguenza aermare che la mappa è uno shift verso
sinistra per la variabile x e verso destra per la variabile y .
Ma c'è di più: tramite confronto, si nota che in entrambi i casi b01 = a1 . Scrivendo quindi
bi = a−i , possiamo rappresentare i punti (x, y) come una successione bi-innita nel modo seguente
(x, y) = (...a−3 a−2 a−1 ; a1 a2 a3 ...)
|
{z
} | {z }
y
x
Si conclude che la mappa del panettiere è uno shift generale verso sinistra del punto (x, y) scritto
in questo modo.
Prima di dimostrare le tre proprietà del caos in questa mappa, occupiamoci di analizzare le
orbite periodiche.
Cominciamo dalle orbite periodiche di periodo 2, calcolando la funzione f2 (x):
f2 : [0, 1]2 → [0, 1]2
y
4x;
4
4x − 1; 2+y
4 x 7→ 1+y
4x − 2; 4
4x − 3; y+3
4
se
x < 1/4
se
1/4 ≤ x < 1/2
se
se
1/2 ≤ x < 3/4
3/4 < x
I punti ssi di f2 (x) sono f2 (0, 0) = (0, 0), f2 ( 13 , 32 ) = ( 13 , 23 ), f2 ( 32 , 13 ) = ( 23 , 13 ) e f2 (1, 1) = (1, 1).
Esplicitiamo ora le orbite del punto ( 32 , 13 ) e del punto ( 13 , 23 )
1 2
2 1
1 2
2 1
1 2
O
,
=
,
;
,
;
,
;
,
; ...
3 3
3 3
3 3
3 3
3 3
2 1
2 1
1 2
2 1
1 2
O
,
,
,
,
,
=
;
;
;
; ...
3 3
3 3
3 3
3 3
3 3
Vi è dunque una sola orbita periodica data da
2 1
1 2
,
,
.
3 3
3 3
3.2.
LA MAPPA DEL PANETTIERE
31
Se esprimiamo la mappa in base binaria, come abbiamo appena mostrato, si nota che un punto
x, appartenente all'orbita periodica di periodo due, deve essere della forma (0, ab; 0, cd), con
a, d, c, d ∈ {0, 1}, poiché, applicando 2k con k ∈ N volte lo shift, si ottiene nuovamente il punto
iniziale. Eettivamente
n+1
∞
∞
∞ X
X
X
1 − 14
1
1
0
1
−1=
0, 012 =
+
=
− 1 = lim
1
2k−1
2k
k
n→∞
3 10
2
2
4
1− 4
k=1
k=1
k=0
come pure
0, 102 =
∞
X
k=1
1
22k−1
∞
∞
X
X
1 1 − 41
0
1
+
=
=
lim
22k
42k+1 n→∞ 2 1 −
k=1
k=0
n+1
1
4
2
=
.
3 10
Per lo stesso motivo, si può aermare che un punto periodico di periodo p deve apparire, in
base binaria, nella forma
(x, y) = (0, a1 a2 ...ap ; 0, b1 b2 ...bp )
con ai , bi ∈ {0, 1}. Vi sono 2p punti di questo tipo, ma non tutti appartengono a un'orbita periodica di periodo p.
Tutte le orbite periodiche sono repulsive, quindi instabili, poiché gli autovalori sono |λ1 | > 1 e
|λ2 | < 1, per tutti i punti x ∈ [0, 1]2 . Si osservi inne che tutti i numeri, che rappresentano x e
y di un punto periodico, sono periodici, quindi sono numeri razionali.
Ora che abbiamo analizzato alcune proprietà della mappa del panettiere e ssato delle importanti premesse, verichiamo se la mappa ha un comportamento caotico.
Cominciamo dalla sensibilità alle condizioni iniziali, calcolando gli esponenti di Ljapunov
come mostrato nella sezione 2.3.3. Si noti che la matrice Df(x) è diagonale, fatto che permette
di eseguire le seguenti operazioni:
n
2
Vn = (Df(x)) =
0
n
0
1n
2
⇒
Vnt Vn
=
22n
0
Λ = lim ln (Vnt Vn )1/2n =
n→∞
ln 2
0
0
1 2n
⇒
2
0
ln 12
1
(Vnt Vn ) 2n
2
=
0
.
Gli autovalori di questa matrice, ossia Λ1 = ln 2 e Λ2 = ln 21 , sono gli esponenti di Ljapunov.
Poiché Λ1 > 0, è dimostrato che la mappa f è sensibile alle condizioni iniziali.
La seconda proprietà è quella della transitività. Occorre trovare una condizione iniziale x0
la cui orbita sia densa in [0, 1]2 , ossia per ogni x ∈ [0, 1]2 costruiamo una condizione iniziale tale
che esista una successione xn di elementi di O(x0 ) che converge verso x. Utilizzeremo la mappa
shift sulla sequenza bi-innita che rappresenta i punti x ∈ [0, 1]2 . Sia x0 un punto della mappa
della forma
x0 = (...a−3 a−2 a−1 ; |{z}
01 00
| 001 010 011{z100 101 110 111} ...
| 01{z10 11} 000
blocco 1
blocco 2
blocco 3
0000
0001 0010 0011 0100 0101 0110 0111{z1000 1001 1010 1011 1100 1101 1110 1111} ...)
|
blocco 4
0
1
2
32
CAPITOLO 3. ESEMPI DI MAPPE CAOTICHE
dove per ogni i vale a−i ∈ {0, 1} arbitrario. Il blocco n contiene 2n n-uple di simboli ordinati
in modo crescente, ovvero tutte le possibili combinazioni, di n cifre, di 1 e 0. Per ogni
x = (...a−2 a−1 ; a1 a2 ...)
e k = 2`, i k simboli centrali, cioè a−` a−`+1 ...a−1 ; a1 ...a`−1 a` , appaiono sicuramente in quest'ordine nel blocco k di x0 , siccome qui vi sono tutte le possibili k -uple.
Ad esempio, per k = 4, i 4 simboli centrali del vettore x, ossia a−2 , a−1 , a1 , a2 , appaiono di certo
nel blocco 4 di x0 indipendentemente dalla scelta di x.
Quindi esiste un n(k) tale che, applicando n(k) volte la funzione f, questa sposta le cifre dal
blocco k alla posizione centrale:
fn(k) (x0 ) = (....a−` a−`+1 ...a−1 ; a1 ...a`−1 a` ...)
e, poiché i primi ` = k/2 termini del vettore fn(k) (x0 ) sono uguali, sia per la variabile x che per
quella y , ai primi ` termini del vettore x, si avrà
||fn(k) (x0 ) − x|| = ||(...a−`−2 a−`−1 0...0; 0...0 a`+1 a`+2 ...)|| =
| {z }
k termini
v
u
u
p
= x2 + y 2 = t
∞
X
a−i
2i
i=`+1
!2
+
∞
X
ai
2i
!2
i=`+1
(x)
`+1
∞
∞
`
∞
X
X
X
1
1 X 1
1
ai
≤
=
−
=2−2 1−
i
i
i
i
2
2
2
2
2
i=`+1
i=`+1
i=0
!
i=0
`
1
=
.
2
(y )
`+1
∞
∞
∞
`
X
X
X
a−i
1
1
1 X 1
≤
=
−
=2−2 1−
i
i
i
i
2
2
2
2
2
i=`+1
i=`+1
i=0
i=0
!
`
1
;
=
2
La norma del vettore fn(k) (x0 ) − x è dunque minore di
s 2
√ 1
1 2
1
1
+
= 2 ` < `−1 .
`
`
2
2
2
2
Sia quindi la successione xn di elementi O(x0 ) denita da xn = fn(k) (x0 ). Si osserva che
n → ∞ equivale a k → ∞ e quindi ` → ∞. Per n → ∞ si ha ||xn − x|| → 0, ossia xn → x. Come
volevasi dimostrare, la successione xn tende a x, da cui consegue la densità dell'orbita O(x0 ) e
quindi la proprietà della transitività che la mappa possiede.
Ci resta da vericare che esiste un insieme di orbite periodiche denso nel quadrato
[0, 1]2 . È già stato detto che tutti i numeri, che rappresentano xp e yp di un punto periodico, sono
periodici, quindi xp , yp ∈ Q. Poiché l'insieme Q2 ∩ [0, 1]2 è denso in [0, 1]2 , si può concludere che
l'insieme di tutte le orbite periodiche è denso in [0, 1]2 .
Con ciò, è stata vericata anche la terza e ultima proprietà del caos. Abbiamo dunque dimostrato che la mappa del panettiere espressa in base binaria è caotica. È stato scelto di dimostrare
le tre proprietà sulla mappa del panettiere espressa in base binaria per questioni di praticità. La
dierenza tra la mappa in base due e quella in base dieci consiste semplicemente nel modo di
3.3.
LA MAPPA DI ARNOLD
33
esprimerle. Si può quindi aermare che anche la mappa in base decimale è caotica.
Riassumendo, la mappa del panettiere è un sistema dinamico conservativo con attrattore
tutto il quadrato [0, 1]2 ed è caotica secondo Devaney.
3.3
La mappa di Arnold
La mappa di Arnold, conosciuta anche col nome di mappa del gatto di Arnold, è il terzo esempio
di sistema dinamico caotico che questo lavoro di maturità illustra. Il nome è dovuto al matematico Vladimir Arnold1 che negli anni Sessanta dimostrò i suoi eetti, usando l'immagine di un gatto.
Prima di analizzare la mappa e le sue proprietà, deniamo lo spazio topologico, chiamato
toro e notato T2 . Questa struttura è omeomorfa ad un toro nello spazio euclideo (gura 3.9).
Figura 3.9:
Il toro nello spazio euclideo.
Per costruire un toro topologico, bisogna considerare un quadrato i cui lati opposti sono incollati. Matematicamente signica denire la relazione di equivalenza ∼T2 sul quadrato [0, 1]2 .
Siano x e y due punti appartenenti a [0, 1]2 . x ∼T2 y se e solo se x = y è un unico punto interno
oppure x e y sono su due lati opposti e hanno una coordinata uguale.
Ora che abbiamo chiarito cosa sia un toro topologico, è possibile studiare la mappa bidimensionale di Arnold, denita nel modo seguente:
f : T2 → T2
(x, y) 7→ (x + y, x + 2y) (mod 1).
Possiamo inoltre scrivere questa mappa in forma vettoriale
xn+1
1
1
xn
=
(mod 1)
yn+1
1
2
yn
Le trasformazioni di questa mappa sono illustrate nella gura 3.10.
La matrice di Jacobi della mappa f è data da
1
A = Df =
1
1
2
1
Vladimir Arnold (1937-2010) fu un brillante matematico russo, basti pensare che a vent'anni trovò la soluzione
al tredicesimo problema di Hilbert. Il suo contributo alla conoscenza umana consiste soprattutto nel teorema
di Kolmogorov-Arnold-Moser sulla stabilità dei sistemi hamiltoniani integrabili. È inoltre noto per il suo stile
espositivo preciso, che combinava opportunamente il rigore matematico all'intuizione sica, e l'approccio didattico
particolarmente semplice.
34
CAPITOLO 3. ESEMPI DI MAPPE CAOTICHE
E+
E−
Figura 3.10:
Operazioni che la mappa applica al toro: repulsione nella direzione E + e attrazione nella
direzione E − .
per qualsiasi x ∈ T2 . Si osserva che la matrice Df è simmetrica, quindi diagonalizzabile. Inoltre det Df = 1, fatto che ci consente di dire che si tratta di un sistema dinamico conservativo,
ossia che preserva la sua area nello spazio delle fasi.
L'unico punto sso della mappa è f(0, 0) = (0, 0). Lo si trova risolvendo il sistema
y = 0 (mod 1)
x + y = x (mod 1)
⇒
x + y = 0 (mod 1)
x + 2y = y (mod 1)
Gli autovalori della mappa f sono
√
3+ 5
λ1 =
2
e
√
3− 5
λ2 =
.
2
Come nel caso della mappa del panettiere, |λ1 | > 1 mentre |λ2 | < 1. Ne consegue che il punto
sso x∗ = (0, 0) è repulsivo iperbolico, ossia l'evoluzione temporale porta dei punti vicini a x∗ a
divergere dal punto sso.
A questi autovalori si associano due autovettori. Sia λ l'autovalore della matrice Df e sia
v = (v1 , v2 ) l'autovettore associato all'autovalore λ. Per denizione, Df(x)v = λv. Il risultato
che si ottiene è
√ • 1; 1+2 5 è l'autovettore di dilatazione associato all'autovalore λ1 =
•
√
−1− 5
;
1
2
√
3+ 5
2 ;
è l'autovettore di contrazione, associato all'autovalore λ2 =
√
3− 5
2 .
Discutiamo ora la stabilità delle orbite di periodo due. Anzitutto, deniamo la funzione f2
come segue
f2 : T2 → T2
(x, y) 7→ (2x + 3y, 3x + 5y) (mod 1)
2
3
2
La matrice di Jacobi che rappresenta questa funzione è A =
per qualsiasi (x, y) ∈
3
5
T2 . Per trovare i punti ssi di f2 , dobbiamo risolvere il seguente sistema. Sia (x∗ , y ∗ ) ∈ T2 un
punto sso della funzione f2 .
∗
∗
2x + 3y ∗ = x∗ (mod 1)
x + 3y ∗ = 0 (mod 1)
⇒
∗
∗
∗
3x + 5y = y (mod 1)
5y ∗ = 0 (mod 1)
3.3.
LA MAPPA DI ARNOLD
35
Da cui si ottiene (x∗ , y ∗ ) = (0, 0) ; 25 , 15 ; 45 , 25 ; 53 , 45 ; 15 , 35 . Le orbite di periodo due
comprendono solo punti appartenenti all'insieme appena esplicitato. Esse sono
3 4
2 1
,
,
5 5
5 5
4 2
1 3
.
,
,
5 5
5 5
Entrambe le orbite sono instabili, essendo repulsive, siccome gli autovalori della matrice
Df (p), in cui p ∈ T2 è un punto periodico di periodo 2, valgono
√
√
7+3 5
7−3 5
λ1 =
λ2 =
.
2
2
2
Elevandoci in astrazione, giungiamo a discorreredelle orbite
periodiche di periodo k . Sia (xp , yp ) ∈
a
b
T2 un punto periodico di periodo k e sia Ak =
la matrice che rappresenta la funzione
b
c
fk per ogni (xp , yp ) ∈ T2 . Questa matrice è simmetrica, perché è stata ottenuta moltiplicando k
volte la matrice simmetrica A per se stessa. Inoltre, avendo la matrice A solo elementi interi, si
ha a, b, c ∈ Z.
I punti ssi di fk sono necessariamente razionali, poiché devono soddisfare un'equazione del tipo
ax + by = x (mod 1)
bx + cy = y (mod 1)
Tutte le orbite sono instabili, perché un autovalore di Ak è di modulo maggiore a 1, mentre
l'altro è di modulo inferiore a 1.
Per calcolare Ak , un risultato interessante da utilizzare è il seguente: sia (Fn ) la successione
di Fibonacci2 denita da
Fn = Fn−1 + Fn−2 con F0 = 0, F1 = 1
Allora
1
A=
1
1
2
F1
=
F2
F2
F3
2
A =
3
3
5
2
F3
=
F4
F4
F5
e si dimostra per induzione che
F2n−1
A =
F2n
n
F2n
F2n+1
Inoltre il numero di punti periodici di periodo k è dato da
2
| det(Ak − I2 )| = |(F2k − 1)(F2k−2 − 1) − F2n−1
|.
Dimostrazione per induzione:
(i)
2
A1
=
F1
F2
F2
F3
1
=
1
1
2
Leonardo Fibonacci (1170-1240 circa) fu un matematico italiano che ebbe un ruolo fondamentale per la
rinascita di questa disciplina dopo il periodo basso medievale. È conosciuto soprattutto per il Liber abbaci, opera
con cui introdusse i numeri arabi in Europa.
36
CAPITOLO 3. ESEMPI DI MAPPE CAOTICHE
(ii) Se per un certo n ≥ 0 vale
An+1 = An A =
An
F2n−1
F2n
=
F2n−1
F2n
F2n
F2n+1
1
1
F2n
, allora
F2n+1
1
2
=
F2n−1 + F2n
F2n + F2n+1
F2n−1 + 2F2n
F2n + 2F2n+1
Si ha F2n−1 + F2n = F2n+1 = F2(n+1)−1 come pure F2n−1 + 2F2n = F2n+1 + F2n = F2(n+1)
e inne F2n + 2F 2n + 1 = F2(n+1)+1 .
Si ottiene quindi
F2(n+1)−1
F2(n+1)
n+1
A
=
.
F2(n+1)
F2(n+1)+1
Quest'ultimo paragrafo è un mattone assolutamente superuo per edicare il nostro discorso
intorno ai sistemi dinamici caotici. Tuttavia, ci è sembrato opportuno includerlo in questo documento, perché persegue un ideale molto più nobile di quello utilitaristico. Ci riferiamo all'amore
disinteressato per la matematica. Riteniamo importante ricordare che la pura contemplazione di
quest'arte, che si verica quando non è nalizzata ad ottenere dei risultati utili, costituisce la
bellezza suprema dell'attività scientica.
Lord Bertrand Russel3 disse infatti che La matematica non possiede soltanto la verità, ma anche
la bellezza suprema - una bellezza fredda ed austera, come quella della scultura. A nostro avviso,
la matematica appare piuttosto come uno straordinario mosaico. Questo paragrafo indica come
ogni pezzo coincida perfettamente con tutti gli altri. È stupefacente constatare come le scoperte
di un matematico italiano medievale, su aspetti molto lontani dalla teoria del caos degli anni
Settanta, siano perfettamente allineate a una costruzione di un matematico russo contemporaneo.
La cosa più bella di questo mosaico è però il fatto che tutti quelli che percepiscono questo amore
disinteressato, che è universale, partecipano al suo sviluppo. Per sviluppo s'intende la ricerca
scientica, che da un lato estende i bordi dell'opera e dall'altro ne aumenta la risoluzione.
Conclusa questa breve digressione, torniamo alla questione principale della sezione: la mappa
del gatto di Arnold ha un comportamento caotico?
Anzitutto, dimostriamo la sensibilità alle condizioni iniziali calcolando gli esponenti di
Ljapunov. La matrice jacobiana che rappresenta la funzione f per ogni x ∈ T2 A, Vn è quindi
uguale a An . Inoltre, siccome A è simmetrica, vale Vnt = Vn .
Gli esponenti di Ljapunov corrisponde agli autovalori della matrice
1
ln A2n = ln A
n→∞ 2n
Λ = lim
Per calcolare gli autovalori della matrice ln A, dobbiamo avvalerci del seguente teorema,
chiamato teorema spettrale.
Sia Pv il proiettore sull'autovettore v della matrice A. Pv è denito da
2
vx
vx vy
vx
Pv =
(vx , vy ) =
.
vx vy
vy2
vy
3
Lord Bertrand Russel (1872-1970) fu un losofo, matematico e politico gallese. Nato in una prestigiosa famiglia
aristocratica britannica, Russel si occupò soprattutto di logica nel campo losoco e sostenne strenuamente le
sue convinzioni paciste nel contesto della prima guerra mondiale. Il suo ideale era una vita creativa e razionale,
come la matematica, se ci è consentito aggiungere.
3.3.
LA MAPPA DI ARNOLD
37
Se λ1 è l'autovalore della matrice A associato a v1 e λ2 è l'autovalore della matrice A associato
a v2 , allora si può esprimere la matrice A in questo modo:
A = λ1 Pv1 + λ2 Pv2 .
Inoltre il teorema aerma che, se A è una matrice simmetrica, per ogni funzione reale g si ha
g(A) = g(λ1 )Pv1 + g(λ2 )Pv2 . Si nota che, per quanto appena detto, gli autovalori della matrice
g(A) sono g(λ1 ) e g(λ2 ).
Applicando il teorema al nostro caso, si ottiene
Λ = ln A = ln(λ1 )Pv1 + ln(λ2 )Pv2
dove λ1 e λ2 sono gli autovalori della matrice A. Gli esponenti di Ljapunov sono quindi gli
autovalori della matrice ln A, ossia
√ !
√ !
3+ 5
3− 5
Λ1 = ln(λ1 ) = ln
Λ2 = ln(λ2 ) = ln
2
2
.
Essendo Λ1 > 0, abbiamo dimostrato che la mappa del gatto di Arnold è sensibile alle condizioni iniziali per tutti i punti x ∈ T2 .
La proprietà della transitività non verrà dimostrata. Tuttavia, per mostrare questa proprietà, si osservi la gura 3.11 che rappresenta un esperimento numerico: la condizione iniziale
(x0 , y0 ) = (0,2; 0,4) subisce 500 000 iterazioni. Il graco riporta quindi l'orbita O(x0 , y0 ) nello
spazio delle fasi. Si nota che l'orbita riempie in modo omogeneo tutto il quadrato [0, 1]2 , proprio
perché è densa in T2 .
Figura 3.11:
Evoluzione temporale del punto (x0 , y0 ) = (0,2; 0,4) dopo 50'000 iterazioni generata con
MAXIMA.
Verichiamo inne che la mappa di Arnold possiede un insieme di orbite periodiche
dense in T2 . Sappiamo già che tutte le orbite periodiche sono instabili. Consideriamo i punti
38
p1 p2
q , q
CAPITOLO 3. ESEMPI DI MAPPE CAOTICHE
con p1 , p2 ∈ Z e q ∈ N∗ . Allora
1
1
1
2
p1
q
p2
q
p1 +p2 mod q
q
p1 +2p2 mod q
q
!
=
!
=
p01
q
p02
q
!
Tutti gli elementi di O pq1 , pq2 sono quindi della forma p̃q1 , p̃q2 . Poiché la mappa è denita
sul toro, si hanno al massimo q valori possibili di p̃1 e p̃2 . Togliendo il punto sso (0, 0) si hanno
un massimo di q 2 − 1 punti nell'orbita considerata. Il periodo è k ≤ q 2 − 1.
Nel caso pq11 , pq22 con p1 , p2 ∈ Z e q1 , q2 ∈ N∗ , si scrivono i punti come
p1 p2
,
q1 q2
=
p1 q2 p2 q1
,
q1 q2 q1 q2
e si utilizza il primo risultato. Si ottiene un'orbita con periodo k ≤ mcm(q1 , q2 )2 − 1. Poiché i
punti del tipo
p1 p2
pi
,
con
∈ Q ∩ [0, 1[
q1 q2
qi
sono tutti punti appartenenti a un'orbita periodica e Q ∩ [0, 1[ è denso in [0, 1[, l'insieme di
tutte le orbite periodiche forma, come volevasi dimostrare, un insieme denso in T2 .
In conclusione, la mappa del gatto di Arnold è un sistema dinamico conservativo con attrattore tutto il toro T2 ed è caotica secondo Devaney.
3.4
La mappa del panettiere dissipativa
L'ultimo esempio di sistema dinamico caotico che consideriamo è la versione dissipativa della
mappa del panettiere. Essa è denita nel modo seguente:
f : [0, 1]2 → [0, 1]2
(x, y) 7→
(2x, ay)
(2x − 1, a(y + 1))
se x <
se x ≥
1
2
1
2
Con 0 < a < 12 . Le trasformazioni che la funzione f applica al quadrato [0, 1]2 sono mostrate
nella gura 3.12.
Figura 3.12:
Applicazione della mappa sul quadrato [0, 1]2 .
3.4.
LA MAPPA DEL PANETTIERE DISSIPATIVA
39
Si nota che la mappa subisce una normale dilatazione nella direzione orizzontale, mentre su
quella verticale si crea una contrazione maggiore rispetto alle mappa presentata nella sezione 3.2.
La matrice di Jacobi della mappa f è data da
2
0
A = Df =
0
a
per ogni punto x ∈ [0, 1]2 . Il determinante di questa matrice vale det(Df) = 2a < 1. Ci troviamo,
quindi, di fronte a un sistema dinamico dissipativo.
L'attrattore C del sistema dinamico è dato dalle bande blu nali ed è ottenuto iterando la
mappa f per n → ∞ volte.
Figura 3.13:
Dissipazione che porta a una dimensione frattale.
Queste bande hanno dimensione 1 nella direzione orizzontale, mentre in quella verticale si
riscontra una dimensione frattale che coincide con un insieme di tipo di Cantor4 . Il bacino di
attrazione BC è tutto il quadrato [0, 1]2 .
Se vi è una contrazione verticale che porta a ottenere una dimensione frattale, qual è la dimensione dell'attrattore?
Evidentemente non è più possibile ragionare utilizzando la mera geometria euclidea. Come
possiamo vedere dall'immagine, le bande blu, ottenute iterando la mappa f innite volte, non
rappresentano dei rettangoli ma nemmeno dei segmenti. La gura che ne scaturisce si trova in
qualche modo fra la prima e la seconda dimensione! Come calcolare il valore esatto della dimensione di un frattale?
Prendiamo ad esempio un cubo di lato uno, che è tridimensionale e che può essere tagliato
in otto (23 ) cubi di lato un mezzo. Se conosciamo la dimensione di un oggetto, le potenze o
gli esponenti ci permettono di ottenere il numero di copie di sé più piccole che questo contiene
per ogni particolare taglia. Una gura a n dimensioni è composta da mn copie di sé di taglia 1/m.
I logaritmi sono l'inverso degli esponenti. Se sappiamo quante copie di sé più piccole contiene
un oggetto, e se conosciamo la loro lunghezza, i logaritmi ci consentono di calcolare la dimensione
dell'oggetto. Non è detto che sia un numero intero.
Si denisce dunque la dimensione frattale, o dimensione di Hausdor5 , di un insieme A nel
modo seguente: sia (rk ) una successione tale che limk→∞ rk = 0 e sia (Nk ) un'altra successione
4
Georg Ferdinand Ludwig Philipp Cantor (1845-1918), celebre matematico tedesco, fu il padre della moderna
teoria degli insiemi. Riconobbe che gli insiemi inniti possono avere dierenti cardinalità e separò gli insiemi in
numerabili e più che numerabili. Provò che Q è numerabile, mentre R è più che numerabile, dimostrando che
esistono almeno due ordini di innità.
5
Felix Hausdor (1868-1942) fu un professore e matematico tedesco fondatore della topologia moderna. Contribuì notevolmente alla teoria degli insiemi e all'analisi funzionale. Nonostante fosse ebreo, con l'ascesa del nazismo,
40
CAPITOLO 3. ESEMPI DI MAPPE CAOTICHE
che indica il numero di oggetti (nel nostro caso bande orizzontali) di taglia lineare rk necessari a
ricoprire l'insieme A. Allora la dimensione di Hausdor è
ln(Nk )
.
k→∞ ln(1/rk )
dH (A) = lim
Questo valore descrive la complessità frattale di un oggetto. Per esempio, la linea della costa
della Gran Bretagna ha dimensione 1,26 circa, leggermente inferiore a quella del contorno tipico di una nube (circa 1,35). Su questa scala, la dimensione 1 descrive una curva liscia, mentre
l'incremento della dimensione tendente a 2 implica una crescente complessità frattale dell'oggetto.
Calcoliamo dunque la dimensione frattale dell'attrattore C , osservando che, dopo k iterazioni,
le bande orizzontali sono 2k e hanno spessore ak .
Per ricoprire con dei quadrati di lato ak tutta l'area di una banda orizzontale, sono necessari
1/ak quadrati. Siccome, però, abbiamo 2k bande, occorre un totale di 2k a−k quadrati. Quindi,
ponendo rk = ak e Nk = 2k a−k , si ottiene
ln(2k a−k )
ln(1/2)
k ln(2/a)
= lim
=1+
k
k→∞ ln(1/a )
k→∞ k ln(1/a)
ln(a)
dH (C) = lim
Prendendo, ad esempio, a =
1
10
si trova dH (C) ≈ 1,301.
Si conclude che la versione dissipativa della mappa del panettiere possiede un attrattore
strano, di dimensione frattale, che non è né una retta né un piano ma una struttura intermedia.
Hausdor pensò che la sua fama lo avrebbe risparmiato dalle persecuzioni. Invece, gli fu revocata la cattedra e
impedito di pubblicare le sue teorie, divieto che Hausdor non rispettò. Quando capì di non potere più evitare la
deportazione, si suicidò insieme alla moglie.
Capitolo 4
Meccanica statistica dei sistemi
dinamici
Questo capitolo tratterà alcune proprietà dei sistemi dinamici dal punto di vista della meccanica
statistica. Inoltre analizzeremo queste proprietà applicate ai sistemi dinamici caotici, più precisamente alle mappe caotiche che sono già state studiate nel capitolo 3, coniugando la meccanica
statistica alla teoria del caos.
4.1
Spazi di misura
In primo luogo deniremo alcuni concetti di cui faremo uso in seguito per illustrare la teoria
ergodica.
Un primo concetto fondamentale è quello di misura. Intuitivamente, si può pensare che una
misura sia una funzione che ad alcuni sottoinsiemi di un certo insieme assegna un numero reale
positivo. Si potrebbe pensare di poter assegnare una misura a tutti i sottoinsiemi di un insieme
Γ. Tuttavia, se vogliamo che la misura abbia alcune utili proprietà, siamo costretti ad assegnare
una misura solo ad alcuni sottoinsiemi di Γ.
Si denisce dunque il concetto di σ -algebra: un insieme di sottoinsiemi A di uno spazio Γ
è detto σ -algebra se:
(i) L'insieme vuoto ∅ ∈ A ;
(ii) Se A ∈ A , allora il suo complementare A ∈ A ;
(iii) Se {Ai } ∈ A , allora
∞
[
i=1
Ai ∈ A .
Se la condizione (iii) vale per un numero di sottoinsiemi nito, si dice che A è un'algebra.
Un'altra denizione necessaria è quella di spazio misurabile. Uno spazio misurabile è una
coppia (Γ, A ), ossia uno spazio Γ insieme a una σ -algebra. Gli insiemi contenuti in A sono detti
insiemi misurabili e A è la σ -algebra degli insiemi misurabili.
È ora possibile dare una denizione formale di misura. Sia (Γ, A ) uno spazio misurabile.
Una misura µ è una funzione µ : A → R+ ∪ {∞} tale che:
41
42
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
(i) µ(∅) = 0;
(ii) Se {An } ∈ A contiene dei sottoinsiemi che sono due a due disgiunti, ossia An ∩ Am = ∅ se
n 6= m, allora
!
∞
∞
X
[
µ(An ).
µ
An =
n=1
n=1
Questa proprietà è chiamata σ -additività e si dice che la misura µ è nita se µ(Γ) < ∞.
Se associamo una misura µ : A → R+ ∪ {∞} a uno spazio misurabile (Γ, A ) otteniamo uno
spazio di misura, ossia una terna (Γ, A , µ). Se µ(Γ) = 1, si dice che (Γ, A , µ) è uno spazio di
probabilità.
Vogliamo ora denire il concetto di misura invariante, che ricopre un ruolo fondamentale
per la teoria ergodica. Prima, però, dobbiamo denire la σ -algebra di Borel1 e la proprietà di
misurabilità di una trasformazione.
Se (Γ, d) è uno spazio metrico, ossia uno spazio su cui è denita una distanza, la σ -algebra
di Borel B(Γ) (o semplicemente B ) è la più piccola σ -algebra che contiene tutti i sottoinsiemi
aperti di Γ.
Una trasformazione f : Γ → Γ è detta misurabile se, per ogni insieme misurabile A ∈ B , la
preimmagine è anche misurabile, ossia f −1 (A) ∈ B .
Giungiamo dunque alla denizione fondamentale di questa sezione: una trasformazione
f : Γ → Γ preserva la misura se la trasformazione è misurabile e se
µ(f −1 (A)) = µ(A)
per ogni A ∈ B . Se µ soddisfa la condizione appena illustrata, si dice che la misura µ è invariante sotto la trasformazione f .
Da questa denizione segue un utile teorema che utilizzeremo negli esempi dei prossimi paragra. Se la σ -algebra B è generata dall'algebra A , allora µ è invariante sotto la trasformazione
f se e solo se
µ(f −1 (A)) = µ(A),
per ogni A ∈ A .
Possiamo ora vericare l'invarianza della misura su alcune mappe. Il primo esempio che
analizziamo è il seguente: si consideri un cerchio di circonferenza 1. Il tempo è trattato come
variabile discreta. Con ogni iterazione, i punti x ∈ [0, 1] sul cerchio sono ruotati di α:
f:
f2 :
x → f (x) = x + α
x → f 2 (x) = x + 2α
mod 1
mod 1
e così via. Chiameremo questo sistema dinamico mappa rotante.
1
Félix Edouard Justin Émile Borel (1871-1956) fu un matematico e politico francese. A soli 23 anni, ottenne
la cattedra di matematica all'Università di Lille. Fu inoltre membro dell'Accademia delle scienze e ne divenne
presidente nel 1934. Borel è stato ministro della marina no al 1940, dopodiché fu imprigionato e in seguito alla
sua liberazione collaborò con la resistenza. Il suo apporto scientico si registra nel campo della topologia, della
teoria della misura, della probabilità e dei giochi.
4.1.
SPAZI DI MISURA
43
Sia λ([a, b]) = b − a la misura sul cerchio e sia ([0, 1], B, λ) lo spazio di misura. La misura
λ(A) di un arco è quindi data dalla lunghezza dell'arco, così che λ([0, 1]) = 1. Si noti che se f
è la rotazione in senso orario di α, allora f −1 è la rotazioni antioraria di α. Se A è un arco, è
chiaro che la sua immagine per la rotazione ha la stessa lunghezza dell'arco, quindi
λ(f −1 (A)) = λ(A),
per ogni A ∈ A . Dunque, per il teorema appena esposto, si conclude che f preserva la misura.
Un secondo esempio di sistema dinamico che preserva la misura è quello della mappa diadica
d, già studiata nella sezione 3.1. Sia quindi ([0, 1], B, λ) lo spazio di misura, dove λ è denita nel
modo seguente:
λ([a, b]) = b − a
con a, b ∈ [0, 1]. Verichiamo che d preservi λ.
Siccome
a b
a+1 b+1
d−1 [a, b] =
∪
,
,
,
2 2
2
2
si ha
b − a (b + 1) − (a + 1)
+
= b − a = λ([a, b]).
2
2
L'equazione µ(d−1 (A)) = µ(A) è valida per ogni intervallo. Poiché
X
λ(I) =
(bi − ai ),
λ(d−1 [a, b]) =
i
dove I = i Ii è l'unione disgiunta degli intervalli Ii = [ai , bi ], si verica che λ(d−1 (I)) = λ(I)
vale per ogni intervallo I che appartiene alla σ -algebra. Quindi, utilizzando il precedente teorema,
si ha λ(d−1 (B)) = λ(B) per ogni insieme misurabile di Borel.
Si può inoltre vedere l'importanza di usare d−1 e non d nella denizione di misura invariante:
infatti λ(d([a, b])) = 2λ([a, b]) e quindi λ(d([a, b])) 6= λ([a, b]).
S
Inne, dimostreremo l'invarianza della misura sulla mappa del panettiere. La misura nell'insieme [0, 1]2 che consideriamo e che noteremo µ è la funzione che assegna a ogni insieme
misurabile A ⊂ [0, 1]2 la sua area, data da
Z
Z
µ(A) = Area(A) =
d xd y =
1 dx.
A
A
Sia quindi ([0, 1]2 , B, µ) lo spazio di misura.
Sappiamo che per cambiare variabile in un integrale su R vale
Z b
Z g−1 (b)
f (x)dx =
f (g(y))g 0 (y)dy,
a
g −1 (a)
dove è stato posto x = g(y). Quando si risolve un integrale cambio di variabile e ci si trova in uno
spazio a due dimensioni, come in questo caso, invece di moltiplicare per la derivata g 0 (y), si deve
moltiplicare per il determinante della matrice di Jacobi Df(y). Calcoliamo dunque la misura di
A∈B
Z
µ(A) =
1 dx.
A
Poniamo y = f−1 (x) e risolviamo l'integrale per cambio di variabile. Otteniamo dunque
Z
µ(A) =
det |Df(y)|dy
−1
f
(A)
44
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
Nella sezione 3.2 abbiamo già calcolato che det Df(x) = 1 per ogni x ∈ [0, 1]2 . Il sistema è
dunque conservativo, vediamo come preserva l'area nello spazio delle fasi:
Z
Z
µ(A) =
| det Df(y)|dy =
1 dy = µ(f−1 (A)).
f
−1
(A)
f
−1
(A)
La misura µ è dunque invariante sotto la trasformazione f. Osserviamo che ogni sistema dinamico
conservativo preserva la misura denita dall'area.
4.2
Irreversibilità
Il secondo principio della termodinamica aerma che esiste un'osservabile, chiamata entropia e
notata S , che è una funzione di stato, scalare ed estensiva che soddisfa le seguenti relazioni:
• la variazione di entropia tra lo stato di equilibrio iniziale e lo stato di equilibrio nale di
un sistema adiabaticamente chiuso è sempre non negativa;
• Lo stato di equilibrio di un sistema isolato Σ = Σ1 ∪ ... ∪ ΣM formato da M sistemi semplici
Σi in interazione è tale che l'entropia del sistema totale S Σ = S Σ1 + ... + S ΣM corrisponde
a un massimo compatibile con i vincoli.
La seconda parte del principio implica che, durante un qualsiasi processo, in un sistema isolato, l'entropia può unicamente aumentare no al raggiungimento del massimo possibile. Lo stato
di equilibrio è quindi lo stato in cui l'entropia è massima compatibilmente con i vincoli.
L'evoluzione dallo stato iniziale a quello nale è dunque irreversibile non è possibile che il sistema
ritorni allo stato iniziale, perché in tal caso l'entropia diminuirebbe.
D'altro canto, la dinamica newtoniana prevede leggi invarianti per inversione temporale. Si
consideri ad esempio il caso di una collisione se nelle equazioni che descrivono questo fenomeno si
cambiasse il segno della velocità, tenendo ssa la posizione, e si lasciasse evolvere il sistema, dopo
un certo tempo questo tornerebbe allo stato iniziale. Questa invarianza per inversione temporale
conferisce alla dinamica newtoniana la proprietà di essere una teoria deterministica in cui passato
e futuro sono equivalenti.
I sistemi meccanici, se sono isolati, sono quindi temporalmente reversibili, mentre nella realtà
si osserva che sistemi macroscopici raggiungono uno stato di equilibrio termodinamico, seguendo
un'evoluzione caratterizzata da un aumento di entropia. Non vi è una corrispondenza tra il livello microscopico, spiegato con la meccanica newtoniana, e quello macroscopico, descritto dalla
termodinamica. Si crea dunque una rottura concettuale tra la meccanica newtoniana e il secondo
principio della termodinamica. Com'è possibile che due teorie scienticamente valide portino a
risultati diametralmente opposti?
4.3
L'ipotesi ergodica
Boltzmann2 si occupò di questo problema e propose un'interessante soluzione che fa uso del concetto di ergodicità.
2
Ludwig Edward Boltzmann (1844-1906) fu un sico e matematico austriaco. Si occupò principalmente di
meccanica statistica e termodinamica, ma il suo impegno si registra anche nel campo dell'elettromagnetismo e
della losoa. Le sue idee furono spesso incomprese e lo scienziato otteneva solo frustrazione dal suo lavoro, tanto
che, il 5 settembre 1906, Boltzmann si suicidò mentre era in vacanza con la famiglia in Italia.
4.3.
L'IPOTESI ERGODICA
45
Anzitutto deniamo il concetto di ensemble. Supponiamo che, invece di studiare un sistema
macroscopico unico, costruiamo delle copie. Prendiamo, ad esempio, molti recipienti identici e vi
mettiamo lo stesso numero di molecole dello stesso gas nelle stesse identiche condizioni. Nel limite
in cui il numero di copie è molto grande otteniamo un ensemble statistico. Poiché la preparazione
delle copie è controllato solo a livello macroscopico, avremo dei sistemi caratterizzati da stati
microscopici dierenti ma con lo stesso stato macroscopico. Così facendo, è possibile cancellare i dettagli microscopici non importanti attraverso un processo di media sull'ensemble statistico.
Il primo passo per risolvere il problema dell'irreversibilità è il seguente: la meccanica statistica dell'equilibrio può essere formulata in termini di medie di ensemble microcanonici, usando
la legge probabilistica µ invariante rispetto all'evoluzione microscopica.
Il postulato che denisce la meccanica statistica di un sistema isolato è il seguente:
Per un sistema macroscopico isolato all'equilibrio, tutti gli stati microscopici corrispondenti
allo stesso stato macroscopico sono equiprobabili.
Consideriamo quindi un sistema isolato. Tutti i punti sulla supercie di energia E in Γ
corrispondono allo stesso stato macroscopico. Inoltre dal postulato consegue che la legge µ deve
essere uniforme e assicurare che H(x) = E , dove H(x) è l'espressione dell'energia in termini
delle variabili microscopiche. Notiamo ΓE la supercie di energia costante denita da ΓE = {x ∈
Γ|H(x) = E}. Nello spazio delle fasi, l'evoluzione è dunque costretta a restare sulla supercie di
energia costante. Possiamo quindi denire una densità di probabilità
1
se
x ∈ ΓE
ρmc (x) = Ω
0
se
x 6∈ ΓE
dove Ω è il numero di stati microscopici sulla supercie di energia E , che è dato da
Z
Ω=
dx,
ΓE
in modo tale che dµ = ρmc (x)dx.
La funzione Ω è anche nota come funzione di partizione microcanonica e ρmc è detto stato
microcanonico. Il valore medio di una misura di un'osservabile microscopica rappresentata dalla
funzione a(x), data dal valore medio sull'ensamble:
R
R
Z
ΓE a(x)dµ
Γ a(x)dµ
hai =
a(x)ρmc (x)dx =
= RE
.
Ω
Γ
ΓE dx
Inne l'entropia è data da S = kB ln Ω. Questa entropia è detta entropia di Boltzmann e mette in
relazione l'entropia di uno stato macroscopico con il numero di stati microscopici corrispondenti
allo stato macroscopico in questione. Si ha quindi una connessione tra il livello microscopico e
quello macroscopico. L'entropia di Boltzmann fornisce una denizione microscopica dell'entropia
termodinamica per un sistema all'equilibrio.
Il secondo passo è considerare la seguente situazione: se in laboratorio si eettua una misura
dell'osservabile A, rappresentata microscopicamente dalla funzione a(x), dove x ∈ Γ, si necessita
di un tempo T che può essere considerato innitamente lungo. Di conseguenza, il risultato di una
misura corrisponde al valore medio temporale a di a durante l'intervallo di tempo T calcolato
con la condizione iniziale x0 associata al sistema. Il valore di questa media è
Z
1 T
a = lim
a(xt )dt,
T →∞ T 0
46
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
dove abbiamo notato xt l'evoluzione temporale dello stato.
A questo punto, Boltzmann comprese che si poteva descrivere microscopicamente e in modo
probabilistico il sistema, identicando la media di ensemble microcanonici con la media a tempo
innito, ossia
a = hai.
Ciò vale però solo ad a una ben precisa condizione, nota come ipotesi ergodica di Boltzmann,
che aerma: partendo da quasi ogni condizione iniziale, l'orbita trascorrerà in ogni regione della
supercie di energia costante una frazione di tempo proporzionale al volume di tale regione.
Questa ipotesi ricopre un ruolo centrale per i principi della meccanica statistica.
Boltzmann risolve dunque con l'ipotesi ergodica il problema dell'irreversibilità e risana la
rottura concettuale tra la meccanica newtoniana che spiega il livello microscopico e la termodinamica che illustra quello macroscopico:
Siccome le regioni in cui le variabili del sistema assumono il valore dell'equilibrio occupano la
maggior parte dello spazio delle fasi, il sistema passerà la maggior parte del tempo in queste
regioni e quindi nello stato di equilibrio.
Per vedere S
come funziona questa ipotesi, suddividiamo la supercie di energia costante in un
reticolo ΓE = i ∆i . La media di a in ogni ∆i è ai . Allora
Z
X Ti
1 T
a(xt )dt ≈
ai
T 0
T
i
dove Ti /T è la frazione di tempo che l'orbita passa in ∆i tra t = 0 e T . Usando l'ipotesi ergodica,
si può scrivere
Ti
µ(∆i )
=
T
µ(ΓE )
Di conseguenza,
X µ(∆i )
ai = ha(x)i.
a=
µ(ΓE )
i
Dal punto di vista pratico, però, si sa che nessun sistema è totalmente isolato dal resto dell'universo. Nei precedenti capitoli, si è trattato a più riprese come delle piccole variazioni della
condizione iniziale, rappresentate da fattori esterni che agiscono sul sistema, possano portare a
una grande dierenza negli stati di evoluzione del sistema. Prendiamo ad esempio il caso di un
sistema dinamico che presenta solo orbite periodiche. L'orbita quindi non passa lo stesso tempo
in regioni di dimensioni uguali e quindi il sistema non è ergodico. Tuttavia, delle piccole perturbazioni esterne, siccome nessun sistema è davvero isolato, potrebbero deviare in continuazione
leggermente l'orbita e farla passare innitamente vicina a ogni punto dello spazio delle fasi. La
sensibilità alle condizioni iniziali potrebbe dunque far apparire ergodico un sistema non ergodico.
Il teorema ergodico di Birkho
Nel 1931, Birkho3 dimostrò un teorema fondamentale che rese le idee di Boltzmann più precise.
Nonostante il teorema di Birkho sia ancora lontano da ciò che occorre alla visione di Boltzmann,
3
George David Birkho (1884-1944) fu un matematico e professore statunitense. Nel 1913 dimostrò un caso
particolare del problema dei tre corpi di Poincaré, fatto che lo rese noto nel mondo scientico. Successivamente
pubblicò Sistemi dinamici e scrisse testi sulla relatività e la sica quantistica. Dopo aver dimostrato il fondamentale teorema di cui tratta questa sezione, Birkho propose una teoria matematica dell'estetica e passò un anno
studiando arte, musica e poesia di molte culture dierenti.
4.3.
L'IPOTESI ERGODICA
47
esso denisce le proprietà dinamiche che un sistema deve possedere per essere ergodico secondo
Boltzmann.
Consideriamo un sistema meccanico con una misura invariante e sia a(x) una funzione, denita sulla supercie di energia costante. Il teorema ergodico aerma che, se a(x) soddisfa alcune
semplici proprietà, allora:
La media a lungo termine a(x0 ) = limT →∞ T1 0T a(xt )dt esiste quasi ovunque sulla supercie
di energia costante, ossia per quasi ogni condizione iniziale x0 . Inoltre
R
a(x0 ) = a(f (x0 ))
e
hai = hai.
a(x0 ) potrebbe dipendere dall'orbita ma non dalla condizione iniziale. Questo può essere
facilmente mostrato perché la media temporale di una funzione che parte da una condizione
iniziale xt0 ∈ Γ può essere scritta come
Z 0
Z T +t0
Z
Z
Z T
1 T +t0
1
1 T
a(xt )dt =
a(xt )dt .
a(xt0 +t )dt =
a(xt )dt +
a(xt )dt +
a(xt0 ) =
T 0
T t0
T
T
t0
0
Nel limite di T → ∞ il primo e l'ultimo termine tendono a zero, mentre il secondo tende a
a(x0 ). La media a lungo termine è quindi costante sull'orbita a(x0 ) = a(xt0 ).
Il teorema di Birkho non ci permette di mostrare che un sistema sico è ergodico, perché la
media temporale dipende ancora dall'orbita e non è necessariamente uguale alla media dell'ensemble. Tuttavia, ora possiamo denire un sistema che soddisfa l'ipotesi ergodica di Boltzmann.
Si dice che un sistema è ergodico se la media a lungo termine di una funzione, a(x) è una
costante, che notiamo ã, sulla supercie di energia costante.
Un sistema ergodico è tale che la media temporale di una quantità dinamica è uguale alla
media microcanonica. Si osserva infatti che
Z
Z
Z
a(x)dµ = a(x)dµ = ãdµ.
dunque
R
ā = ã =
a(x)dµ
R
= ha(x)i.
dµ
Possiamo anche dimostrare che l'ipotesi di Boltzmann (il tempo che l'orbita trascorre in
una regione della supercie di energia costante è proporzionale alla sua misura) è vera per un
sistema
S ergodico. Consideriamo ancora un reticolo in cui è divisa la supercie di energia costante
ΓE = i ∆i e prendiamo come a(x) le funzione caratteristica della regione ∆i , χi (x), denita da
1
se x ∈ ∆i
χi (x) =
0
se x 6∈ ∆i
RT
Segue che χ(x) = limT →∞ T1 0 χi (xt )dt = limT →∞ Ti /T che è la frazione di tempo che il
sistema trascorre nella regione ∆i . Inoltre
R
χi (x)dµ
µ(∆i )
R
χ(x) = hχ(x)i =
=
.
µ(ΓE )
dµ
48
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
La visione di Boltzmann diventa sempre più nitida: se dimostriamo che un sistema è ergodico,
sappiamo che le sue proprietà della media temporale sono uguali alle appropriate proprietà della
media dell'ensemble microcanonico. Inoltre la meccanica statistica può essere usata per determinare le proprietà della media temporale del sistema.
In conclusione, Boltzmann aerma che se il sistema trascorre tempi uguali in regioni di uguale
misura e se la regione della supercie di energia costante che corrisponde allo stato macroscopico
di equilibrio possiede in gran maggioranza la misura più ampia, allora ne conseguono tutti i
risultati della termodinamica dell'equilibrio.
4.4
Descrizione matematica dell'ergodicità
Nella sezione precedente abbiamo introdotto il concetto di ergodicità e ne abbiamo esposto il
senso sico. Nella prossima parte descriveremo il concetto dal punto di vista matematico specicatamente per i sistemi dinamici.
4.4.1 Media temporale e media statistica
In primo luogo dobbiamo denire la media temporale e la media statistica di una funzione. Ricordiamo che un sistema dinamico è costituito da uno spazio delle fasi Γ e da una legge, che nel
caso delle mappe è una funzione f .
Per ogni funzione a : Γ → R si denisce la media temporale di a, notata a : Γ → R come
segue:
n−1
1X
a(f k (x)).
a(x) = lim
n→∞ n
k=0
La media temporale a di una funzione a è quindi a sua volta una funzione.
Una funzione particolarmente utile sarà la funzione caratteristica di A ⊂ Γ, denita da
1
se x ∈ A
χA (x) =
0
se x 6∈ A
La media temporale di χA corrisponde al tempo medio di soggiorno dell'orbita di condizione
iniziale x nel sottoinsieme A e notato τA (x):
n−1
1
1X
τA (x) = lim τA (x, n) = lim
χA (f k (x)).
n→∞ n
n→∞ n
k=0
P
n−1
Infatti τA (x, n) = limn→∞ n1 k=0 χA (f k (x)) conta il numero di punto dell'orbita che sono in A.
La seconda denizione che dobbiamo dare è quella di media statistica di a, notata hai. Si
denisce la media statistica come il numero
Z
hai =
a(x) dµ(x).
Γ
A dierenza della media media temporale, in linea di principio assai dicile da calcolare perché
presuppone la conoscenza dell'evoluzione temporale, la media statistica è soltanto un integrale,
che si suppone si sia in grado di calcolare.
4.4.
DESCRIZIONE MATEMATICA DELL'ERGODICITÀ
49
4.4.2 Interpretazione matematica del teorema di Birkho
Il teorema di Birkho presentato nella sezione 4.3 può essere chiaramente denito anche per
i sistemi dinamici discreti. Da notare che la supercie di energia costante è qui sostituita con
un insieme invariante di misura nita e la media microcanonica è sostituita con un'appropriata
media statistica sull'insieme invariante. Per insieme invariante si intende una regione dello spazio delle fasi tale che tutti i punti dell'insieme rimangono nell'insieme nel corso dell'evoluzione
dello stato e la misura resta costante. È il caso dunque della struttura di attrattore che abbiamo
trattato precedentemente.
4.4.3 Il teorema della ricorrenza
Un secondo teorema fondamentale della teoria ergodica è il teorema della ricorrenza di Poincaré4 .
Sia A ⊂ Γ un insieme misurabile. Si dice che x ∈ A è un punto ricorrente in A se, per ogni
N > 0, esiste un n ≥ N tale che f n (x) ∈ A. L'insieme dei punti ricorrenti in A è notato RA ,
mentre il complementare A \ RA , notato VA , è detto insieme dei punti vaganti di A.
Il teorema della ricorrenza di Poincaré aerma che, per ogni sistema dinamico e per ogni A ⊂ Γ
misurabile, l'insieme VA è di misura nulla. In altre parole, ad eccezione dei punti di un insieme
di misura nulla, tutti i punti ritornano innite volte in un qualunque insieme ssato A che li
contenga.
È importante fare due osservazioni riguardo a questo teorema:
• I tempi di ricorrenza possono essere assurdamente grandi, anche per sistemi molto semplici,
e superare l'età dell'Universo.
• È bene sottolineare che il comportamento ricorrente dei singoli moti non preclude il comportamento irreversibile degli insiemi di punti tipico dei sistemi mixing (vedere sezione
4.6).
4.4.4 Denizioni di ergodicità
Vi sono quattro proprietà equivalenti che si possono scegliere come denizione di sistema ergodico.
Denizione 1. Per ogni funzione sommabile a : Γ → R, la media temporale e la media
statistica coincidono
a(x) = hai.
Questa è le denizione classica di erogidicità e si rivela molto utile a livello pratico, perché permette di sostituire la media temporale, dicile da calcolare, con la media statistica che si trova
molto più facilmente perché non richiede la conoscenza dell'evoluzione del sistema.
Denizione 2. Per ogni insieme A ⊂ Γ misurabile, il tempo medio di soggiorno in A è uguale
alla misura di A:
τA (x) = µ(A).
In altre parole, la probabilità, che l'osservazione fatta in modo casuale sul sistema dia un valore
dello stato che rientra in A, è pari alla misura di A. Il volume dello spazio delle fasi assume
4
Henri Jules Poincaré(1854-1912) fu un matematico, sico e losofo naturale francese. Poincaré viene considerato l'ultimo universalista, perché era un esperto in ogni disciplina nota ai suoi giorni. Oltre che per i suoi
contributi alla matematica applicata, alla sica matematica, alla meccanica celeste, Poincaré è ricordato per essere
la prima persona a scoprire un sistema caotico deterministico, ossia il problema di un sistema gravitazionale con
tre corpi che orbitano uno intorno agli altri proposto dal re Oscar II di Svezia. Questo scienziato presentò inoltre
le trasformazioni di Lorentz nella loro forma moderna.
50
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
quindi un signicato di probabilità.
Denizione 3. Le sole funzioni invarianti rispetto all'evoluzione temporale sono le funzioni
costanti. In altre parole, per ogni funzione a : Γ → R tale che
a(f n (x)) = a(x)
∀ x ∈ Γ,
allora a(x) = costante.
Denizione 4. I soli insiemi A ⊂ Γ misurabili invarianti sono di misura nulla oppure 1, ossia
µ(f −n (A)) = µ(A)
µ(A) = 0 o µ(A) = 1.
⇒
In questo caso si dice che il sistema è metricamente indecomponibile, ovvero ogni scomposizione
Γ = A ∪ (Γ \ A) misurabile e invariante è metricamente banale. Quest'ultima denizione sarà
approfondita nella sezione 4.6.2.
4.5
L'ergodicità nelle mappe
Dimostreremo ora la proprietà ergodica su tre sistemi dinamici già conosciuti: la mappa diadica
(sezione 3.1), la mappa rotante (sezione 4.1) e la mappa del panettiere (sezione 3.2).
4.5.1 La mappa diadica
In vista della dimostrazione che presenteremo, occorrono alcune premesse. In primo luogo occorre
fare un'osservazione sulla notazione: se λ è una misura e A e B sono insiemi misurabili con
λ(B) > 0, la densità di A in B è denita da
λ(A : B) =
λ(A ∩ B)
.
λ(B)
Il secondo passo è denire un nuovo concetto che ci sarà utile anche nel seguito. Una partizione di un insieme Γ è una scomposizione di Γ in sottoinsiemi Wi non triviali e disgiunti tali
che
Γ=
[
Wi
e
i
Wi ∩ Wj 6= ∅ ∀ i 6= j
L'ultima premessa è il seguente teorema:
Sia P1 , P2 , . . . una sequenza di partizioni nite di [0, 1] di intervalli aperti aventi le seguenti
proprietà:
(i)
(ii)
Ogni elemento di Pn è un'unione di elementi di Pn+1 ;
La dimensione massima degli elementi di Pn tende a 0 quando n → ∞.
Sia A un qualsiasi sottoinsieme di [0, 1] tale che λ(A) > 0. Allora esiste una sequenza di intervalli
I1 , I2 , ..., con In ∈ Pn tali che
lim λ(A : In ) = 1.
n→∞
È ora possibile dimostrare l'ergodicità della mappa diadica.
4.5.
L'ERGODICITÀ NELLE MAPPE
51
Sia A un insieme invariante sotto la trasformazione d incluso in [0, 1] con λ(A) > 0. Sia
p ∈ [0, 1] un punto sso di d, ossia d(p) = p. Per ogni n ∈ N, le preimmagini di p sotto d−n
deniscono una partizione Pn su 2n intervalli aperti di lunghezza 2−n . Se prendiamo qualsiasi
intervallo J ∈ Pn , la mappa dn è un dieomorsmo (ossia è dierenziabile, invertibile e la sua
inversa è dierenziabile) su [0, 1] \ {p} in cui vale (dn )0 (x) = 2n .
Siccome A è invariante, segue che d−n (A) = A. Sia ε > 0. Il teorema appena visto implica che
esiste un n ∈ N e un intervallo J ∈ Pn tale che λ(A : J) > 1 − ε. Si noti che dn (A ∩ J) ⊂ A. Di
conseguenza
n
λ(A) ≥ λ(f (A∩J)) =
Z
(dn )0 (x)dx = 2n λ(A∩J) = 2n λ(A : J)λ(J) > 2n (1−ε)λ(J) = 1−ε.
A∩J
Siccome è stato scelto arbitrariamente, si conclude che λ(A) = 1. L'unico insieme invariante
con misura positiva è l'intero quadrato [0, 1], da cui si deduce, usando la denizione 4, che la
mappa diadica è ergodica.
4.5.2 La mappa rotante
Come secondo esempio di sistema ergodico, si consideri la mappa rotante illustrata nella sezione
4.1: lo spazio su cui è denita la mappa è un cerchio di circonferenza 1 e, con ogni iterazione, i
punti x ∈ [0, 1] sul cerchio sono ruotati di α.
Due sono dunque i casi possibili:
• Se α è un numero razionale n/m, con n, m ∈ Z, allora dopo un numero nito m di iterazioni,
la funzione mappa tutti i punti alla loro posizione iniziale. L'orbita dunque sarà periodica
e non passerà lo stesso tempo in regioni di misura uguale. In questo caso il sistema non è
ergodico;
• Se α è irrazionale, nessuna orbita sarà mai periodica e riempirà in modo denso il cerchio:
il sistema è quindi ergodico.
Dimostriamo dunque, utilizzando la denizione 3, l'ergodicità della mappa rotante per α ∈
R\Q e
X
a(x) =
âk e2πikx ,
k∈Z
dove abbiamo espresso a(x) in serie di Fourier5 .
Siccome f n (x) = x + nα mod 1 e e2πim = 1 per m ∈ Z, si ottiene
a (f n (x)) =
X
âk e2πik(x+nα) .
k∈Z
Supponendo che a(x) = a (f n (x)) , deduciamo che i coecienti della serie devono soddisfare
âk = âk e2πiknα
5
Jean Baptiste Joseph Fourier (1768-1830) fu un matematico e sico francese. Fourier è inoltre ricordato per
il suo impegno politico: partecipò alla Rivoluzione francese, alla campagna di Napoleone in Egitto e diventò
prefetto dell'Isère. Il suo contributo alla scienza consiste nella formulazione della legge di conduzione termica e
nella teorizzazione della serie di Fourier e della conseguente trasformata.
52
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
allora, poiché α è irrazionale, necessariamente âk = 0 per ogni k 6= 0. Quindi a(x) = â0 , cioè
a(x) è costante. La mappa rotante sul cerchio è quindi ergodica. Per questo esempio possiamo
notare come è possibile utilizzare anche la denizione 1. Infatti dato
X
a(x) =
âk e2πikx
k∈Z
la media temporale di a(x) è data da
n−1
n−1
1X
1X
j
ā(x) = lim
a f (x) = lim
a (x + jα
n→∞ n
n→∞ n
j=0
mod 1)
j=0
n−1
n−1
X
1 XX
1 X 2πikjα
= lim
âk e2πik(x+jα) =
âk e2πikx lim
e
n→∞ n
n→∞ n
j=0 k∈Z
=
X
k∈Z
k∈Z
j=0
einkα
11−
n→∞ n 1 − eikα
âk e2πikx lim
e poiché α è irrazionale, il denominatore non è mai nullo. Se k 6= 0
1 1 − einkα
=0
n→∞ n 1 − eikα
lim
e quindi ā(x) = â0 , ma il coeciente â0 della serie di Fourier si ottiene come
Z
â0 =
1
a(x)dx
0
e quindi data la misura che corrisponde alla lunghezza dell'arco dµ(x) = dx si ha
ā(x) = hai
ossia la media temporale equivale alla media statistica rispetto alla misura µ.
4.5.3 La mappa del panettiere
Un altro sistema dinamico già studiato che presenta un comportamento ergodico è la mappa del
panettiere. Prima di dimostrare questa proprietà occorre esporre un utile teorema.
Si consideri un intorno di un punto x. Gli autovettori della matrice sono già stati calcolati
precedentemente: (0, 1) è l'autovettore di contrazione e (1, 0) è l'autovettore di dilatazione. Quindi la linea verticale che passa per il punto x rappresenta la direzione di contrazione. Ciò signica
che le immagini future dei punti su questa linea saranno sempre più vicine alle immagini di x.
La linea orizzontale, invece, che passa per il punto x rappresenta la direzione di dilatazione e i
punti che si trovano su di essa avranno immagini che si allontaneranno da quelle del punto x.
Se, però, applichiamo la trasformazione inversa, i ruoli della direzione x e della direzione y si
invertono. Sappiamo inoltre che esiste una misura invariante sul quadrato [0, 1]2 : dµ = dxdy =
d x 0 d y 0 = d µ0 .
Supponiamo di considerare una funzione a per la quale è possibile utilizzare il teorema di
Birkho. La trasformazione del panettiere è ergodica se a(x) non dipende da x, dove a(x) è la
media temporale innita di a(x) con condizione iniziale x. Per il teorema di Birkho, questa
4.5.
L'ERGODICITÀ NELLE MAPPE
53
media esiste quasi ovunque.
Deniamo ora la media temporale per a(x) e per la sua inversa:
n−1
1X j
a (x) = lim
a(f (x)),
n→∞ n
+
j=0
n−1
1 X −j
a(f (x)),
a (x) = lim
n→∞ n
−
j=0
dove f è la mappa del panettiere.
In primo luogo, dimostriamo che le due medie temporali sono uguali, ossia
a+ (x) = a− (x)
quasi ovunque. Deniamo dunque un insieme di punti Aε come segue:
Aε = {x|a+ (x) − a− (x) > ε > 0}.
Secondo il teorema di Birkho, la media temporale è indipendente dalla condizione iniziale,
quindi la dierenza tra a+ (x) e a+ (f−1 (x)) è zero, così come vale a− (x) = a− (f−1 (x)).
L'insieme Aε è dunque invariante e
Z
[a+ (x) − a− (x)]dµ > εµ(Aε ).
Aε
Useremo in questa sezione la terza denizione di ergodicità: in un sistema ergodico vale
a(f n (x)) = a(x) ⇒ a(x) = costante.
Il teorema di Birkho sostiene che la media temporale è indipendente dalla condizione iniziale,
ossia poiché l'insieme Aε è invariante, si nota che l'integrale di a+ sull'insieme Aε è uguale
all'integrale di a sulla stessa regione:
Z
Z
+
a (x)dµ =
a(x)dµ.
Aε
Aε
Lo stesso discorso vale per il termine a− , quindi
Z
εµ(Aε ) <
[a+ (x) − a− (x)]dµ = 0.
Aε
Ciò signica che µ(Aε ) = 0. Quindi, a+ (x) = a− (x) quasi ovunque. Siccome vale la premesse
della terza denizione, occorre dimostrare che vale la conseguenza, ossia che a(x) è costante, per
concludere che la mappa del panettiere è ergodica.
A questo punto possiamo usare l'uguaglianza appena vista per dimostrare l'ergodicità della
mappa del panettiere seguendo questa idea: bisogna provare che la media temporale di a+ è indipendente dalla coordinata y del punto x = (x, y), ossia che a+ (x) = a+ (x). Inoltre è necessario
dimostrare che la media temporale dell'inversa, ossia a− , è indipendente dalla coordinata x del
punto x, ovvero a− (x) = a− (y). Allora, siccome a+ (x) = a− (x), vale a+ (x) = a− (y). Possiamo
quindi concludere che a+ (x) = a− (y) = a = costante, siccome x e y sono indipendenti.
54
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
f−1 (w)
w
f(w)
f−1 (u)
f−1 (v)
f(u)
u
p
v
f−1 (p)
f(p)
f(v)
f(z)
z
f−1 (z)
Figura 4.1:
Evoluzione dei punti w e z che si trovano sulla linea verticale di restrizione e dei punti u e
che sono sulla linea orizzontale di dilatazione.
v
Per procedere con la dimostrazione, consideriamo un punto dello spazio delle fasi, notato
p = (x, y). Consideriamo ora un piccolo intorno del punto p nel quadrato [0, 1]2 e due punti w
e z sulla linea verticale di cui abbiamo parlato all'inizio.
Se i punti p, w e z si trovano sulla stessa linea verticale, si osserva che fn (w) e fn (z) si avvicinano
a f n (p) per n → ∞ (gura 4.1).
Di conseguenza, la distanza tra questi due punti tende a zero:
d[fn (w), fn (p)] =
1
d(w, p) → 0,
2n
1
d(z, p) → 0.
2n
Allo stesso modo, due punti u e v sulla linea orizzontale di dilatazione si avvicinano a p
quando il sistema subisce la trasformazione inversa, per n → ∞ (gura 4.1):
d[fn (z), fn (p)] =
d[f−n (u), f−n (p)] =
1
d(u, p),
2n
1
d(v, p).
2n
Abbiamo usato la trasformazione inversa che subiscono i punti sulla linea orizzontale di dilatazione per evitare le complicazioni della mappa del panettiere che taglia in due lo spazio della fasi.
d[f−n (v), f−n (p)] =
Quindi, se a è derivabile abbastanza volte, si ottiene
|a(fn (p)) − a(fn (w))| → 0
in modo esponenziale, per n → ∞ e per punti w sulla linea verticale di contrazione. Per punti u
sulla linea orizzontale di dilatazione, invece, vale
|a(fn (p)) − a(fn (u))| → 0
quando n → −∞. La sommatoria, che denisce la media temporale per a(p) vista all'inizio, può
essere separata così da poter usare questo risultato:
!
Nε
N
−1
X
1 X
+
a (w) = lim
+
a(fn (w)).
N →∞ N
n=0
n=Nε +1
4.6.
SISTEMI MIXING
55
La prima sommatoria tende a zero, se Nε è ssato. Per un Nε sucientemente grande, è
possibile sostituire, approssimando, a(fn (w)) con a(f(p)). Quindi, per punti w sulla linea verticale
di restrizione su cui si trova p, il valore medio di a+ è indipendente da y e si ha
a+ (w) = a+ (p) = a+ (x),
dove x è semplicemente la coordinata orizzontale dei due punti p e w dello spazio delle fasi.
Un discorso analogo può essere fatto per la media temporale di a− , in cui si ottiene
a− (u) = a− (p) = a− (y),
dove y è semplicemente la coordinata verticale dei due punti u e p.
Dunque, i punti sulla linea verticale di restrizione hanno la stessa media temporale per tempo
positivo, mentre i punti sulla linea orizzontale di dilatazione hanno la stessa media temporale
per tempo negativo.
In conclusione
a− (u) = a− (p) = a− (v),
a+ (w) = a+ (p) = a+ (z).
Si nota che a+ (p) non dipende dalla coordinata y di p e che a− (p) non dipende dalla coordinata x di p. Ricordando che a+ (p) = a− (p), ciò signica che, siccome a(p) non dipende né dalla
sua coordinata x né da quella y , a(p) deve essere costante, indipendentemente dalla condizione
iniziale p. Ne consegue che la mappa del panettiere è ergodica.
4.6
Sistemi mixing
4.6.1 Denizione
Per spiegare come sistemi meccanicamente reversibili raggiungano l'equilibrio termodinamico,
Gibbs6 tentò un altro approccio rispetto a Boltzmann. Se quest'ultimo si concentrò sull'evoluzione nello spazio delle fasi di un singolo sistema e giunse al concetto di ergodicità in termini
di tempi di soggiorno della singola orbita in una determinata regione dello spazio delle fasi che
è proporzionale al volume della stessa, Gibbs, invece, considerò il comportamento medio di un
insieme di punti sulla supercie di energia costante con stato iniziale molto simile.
Si consideri un insieme A di condizioni iniziali. Quando l'insieme viene iterato nello spazio Γ e diventa At = {x ∈ Γ|xt ∈ A}, questo cambia forma ma la sua misura resta costante: µ(A) = µ(At ).
Si pensi, ad esempio, alla mappa del panettiere l'insieme viene stirato e ripiegato e arriva addirittura a ricoprire tutta la supercie dello spazio delle fasi. Tuttavia, l'insieme At avrà la stessa
struttura topologica dell'insieme A. Inoltre se applichiamo t volte la funzione inversa su At , otterremo di nuovo l'insieme A.
In altre parole, un insieme di punti inizialmente vicini viene espanso su tutta la supercie di
energia costante.
Un esempio squisito, a prescindere dai gusti, è quello del risotto allo zaerano. Alcuni dicono
che questo ingrediente è assolutamente superuo e che solo un mediocre cuoco se ne avvale per
6
Josiah Willard Gibbs (1839-1903) è ricordato per essere stato un grande ingegnere, sico e chimico statunitense. In campo chimico, vi è l'energia libera di Gibbs che prevede la spontaneità di una reazione. Questa sezione,
invece, mostra l'importante contributo dello scienziato per la termodinamica, mentre per la matematica si occupò
dell'analisi vettoriale.
56
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
dar colore alla pietanza. In ogni caso, l'odore della spezia che resta sulle dita di chi cucina è
sucientemente piacevole da motivare di per sé il suo utilizzo.
Tornando alla sica, immaginiamo di avere il riso nella pentola e di aggiungere un pizzico di
zaerano. Lasciamo cadere qualche milligrammo della spezia in una piccola area della padella.
Il riso in quest'area diventerà subito di un colore arancione acceso (a seconda del vino usato),
mentre il resto dei chicchi apparirà ancora di un colore bianco smorto. A questo punto il cuoco
comincia a mischiare il riso. Dopo qualche giro di mestolo (che nel caso dei sistemi dinamici
mixing corrisponde alle iterazione del sistema), nella padella si vedranno delle aree più gialle e
altre ancora bianche. Continuando a rimestare, si giungerà ad avere un riso colorato in modo
omogeneo. Lo zaerano, che inizialmente aveva prodotto un'area della padella diversa per colore
dal resto, si è distribuito in tutta la padella e ha creato un riso dello stesso colore. Si noti che la
quantità di zaerano nel risultato nale è uguale a quella dello stato iniziale. Allo stesso modo,
un insieme di condizioni iniziali vicine viene iterato no a essere distribuito uniformemente nello
spazio delle fasi. Anche qui, At ha la stessa misura di A.
Gibbs pensò che una distribuzione apparentemente uniforme dell'insieme At sulla supercie
di energia costante fosse la chiava per comprendere come i sistemi dinamici matematicamente
reversibili possano raggiungere l'equilibrio.
Per rendere la sua idea più precisa, Gibbs espresse la denizione di sistema mixing come segue:
Un sistema è denito mixing se, per ogni insieme B 6= ∅, vale
µ(B ∩ At )
µ(A)
=
t→∞
µ(B)
µ(ΓE )
lim
dove ricordiamo che ΓE rappresenta l'intera supercie di energia costante.
Il signicato di questa denizione è che l'insieme At , pur conservando la misura, si diluisce
uniformemente in ΓE . Ciò è possibile se A si lamenta per eetto della dinamica e invade uniformemente ΓE . L'insieme B , invece, va inteso come nestra di osservazione.
4.6.2 Mixing ed ergodicità
Come si vedrà successivamente, la condizione di mixing per un sistema è più forte della condizione di ergodicità. Tuttavia, si può dire molto di più per l'equilibrio di un sistema mixing che per
quello di un sistema ergodico. Per denire la dierenza tra sistema mixing e sistema ergodico,
occorre introdurre il concetto di scomponibilità metrica.
Un sistema scomponibile metricamente è tale che esiste una suddivisione della supercie di
energia costante in due regioni di misura diversa da zero, in cui entrambe le regioni devono essere
restare invarianti quando il sistema viene iterato. In altre parole, un punto dello spazio delle fasi
che si trova inizialmente in una regione dovrà sempre restare in essa.
Gli esempi di mappe analizzati nel capitolo 3 sono tutti metricamente non scomponibili, perché
non possiedono questa proprietà.
A questo punto è possibile riportare un'importante proposizione: un sistema è ergodico se
e solo se non è metricamente scomponibile. Tale aermazione equivale a dire che un sistema è
metricamente scomponibile se e solo se non è ergodico.
4.6.
SISTEMI MIXING
57
Dimostrazione
⇒ Su una supercie che può essere suddivisa in due regioni invarianti 1 e 2, sia a(x) la funzione
della regione 1,
a(x) = χ1 (x).
Per l'invarianza, la media temporale di a è
1
a(x) = lim
T →∞ T
Z
T
χ1 (xt )dt = χ1 (x) =
0
0
1
se x ∈ 2
se x ∈ 1
Siccome questo valore non è costante su Γ, il sistema non è ergodico.
⇐ Per un sistema non ergodico, a(x) non è costante ma dipende dalla traiettoria. Per alcuni
γ , entrambi gli insiemi {x|a(x) ≥ γ} e {x|a(x) < γ} contengono orbite complete, poiché
a(x) è costante sull'orbita. Gli insiemi sono dunque invarianti e formano una scomposizione
in due regioni, entrambe di misure positive.
Un'altra importante relazione logica è che la proprietà mixing di un sistema implica che il
sistema è anche ergodico, si ha quindi
Mixing
⇒
Ergodicità.
Si consideri un sistema mixing e sia A = At un insieme invariante. Allora, per ogni insieme B
vale
µ(B ∩ At )
µ(A)
lim
=
t→∞
µ(B)
µ(ΓE )
che equivale a
lim µ(At ∩ B) =
t→∞
µ(A)µ(B)
.
µ(ΓE )
Se poniamo B = A = At , allora At ∩ B = A e
µ(A) =
µ(A)µ(B)
.
µ(B)
Quest'ultima soluzione ha due soluzioni:
(i) µ(A) = 0. Questa è la soluzione banale che comporta un insieme di misura zero;
(ii) µ(A) = µ(ΓE ). L'insieme invariante è quindi l'intera supercie di energia costante.
Se un sistema è mixing, dunque, l'unico insieme invariante con misura positiva è la supercie
di energia costante. Di conseguenza, un sistema mixing è ergodico ma non necessariamente è
vero il contrario. Dal punto di vista sico, un sistema ergodico permette di descrivere gli stati
di equilibrio, mentre la condizione più forte di mixing permette anche di descrivere l'evoluzione
verso questi stati.
58
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
4.6.3 La proprietà di mixing nelle mappe
Per un sistema dinamico discreto, esistono due denizioni di mixing equivalenti. La prima, analoga a quella riportata nella sezione 4.6.1, è la seguente:
un sistema è denito mixing se, per ogni insieme B 6= ∅, vale
µ(B ∩ f −n (A))
= µ(A)
n→∞
µ(B)
lim
Una seconda denizione di sistema mixing è:
un sistema è denito mixing se, per ogni coppia di funzioni a, b si ha
lim h(a ◦ f n )bi = haihbi.
n→∞
Questa seconda proprietà esprime la perdita delle correlazioni tra due funzioni qualsiasi. In
generale, la funzione G denita da
G(n) = h(a ◦ f n )gi − haihbi
è chiamata funzione di correlazione di a e b. Se a = b, G è detta funzione di autocorrelazione di a.
Se G(t) 6= 0, allora i valori (la misurazione) di a e b, a distanza di tempo n, non sono indipendenti.
Per tornare all'importante relazione tra ergodicità e mixing, mostreremo ora un controesempio in cui un sistema è ergodico ma non mixing.
Si consideri la mappa rotante della sezione 4.1. Abbiamo già detto che questo sistema è erogodico, perché, se iteriamo una condizione iniziale, la sua orbita passa lo stesso intervallo di
tempo in regioni di ugual misura. Tuttavia, per determinare se il sistema è anche mixing, occorre
analizzare l'evoluzione temporale di un insieme di punti.
Supponiamo di prendere un piccolo segmento della circonferenza come insieme iniziale. In questo
caso, l'insieme f −n (A) rimarrà un segmento che ruota rigidamente intorno al cerchio. Ne consegue che il limite t → ∞ della misura dell'insieme f −n (A) ∩ B non esiste per nessun insieme B di
misura positiva sul cerchio.
La mappa rotante è quindi ergodica ma non mixing.
Abbiamo denito in modo matematico un sistema mixing, ma come appare la sua evoluzione
nello spazio delle fasi? Utilizzando un esempio già conosciuto, mostreremo il comportamento di
un sistema mixing.
Le gure 4.2 e 4.3 rappresentano la proprietà di mixing applicata alla mappa di Arnold.
Utilizzando il programma Maple, abbiamo preso come insieme di condizioni iniziali il quadrato
A0 = [0, 41 ]2 e lo abbiamo iterato più volte sotto la mappa.
Si osserva che l'insieme iniziale si lamenta e, già dopo sette iterazioni della mappa, va a
coprire in modo abbastanza omogeneo tutto il quadrato [0, 1], ossia tutto lo spazio delle fasi.
Inoltre dalla gura 4.2 si può intuire che la misura dell'insieme A0 , intesa come area dell'insieme,
è preservata.
4.6.
Figura 4.2:
SISTEMI MIXING
A sinistra, insieme di condizioni iniziali A0 = [0, 41 ]2 ; al centro, f(A0 ); a destra,
Graco generato con Maple.
Figura 4.3:
2
f
59
(A0 ).
A sinistra, f3 (A0 ); al centro f5 (A0 ); a destra f7 (A0 ). Graco generato con Maple.
4.6.4 Mixing ed equilibrio
Per concludere questa sezione, analizzeremo il legame tra i sistemi mixing e l'equilibrio.
Si consideri un sistema isolato che inizialmente non è in stato di equilibrio. Vogliamo calcolare
la media dell'ensemble al tempo t per un'osservabile a:
R
ρ(x, t)a(x)dx
ha(x)it = R
,
ρ(x, t)dx
dove ρ(x, t) è la funzione di distribuzione del sistema che dipende dal tempo e dalla posizione
nello spazio delle fasi. Questa media soddisfa l'equazione di Liouville7 ,
d
ρ(x, t) = 0.
dt
Supponiamo che il sistema sia mixing e consideriamo la supercie di energia costante come un
reticolo diviso in regioni ∆i . Allora a(x) può essere descritta approssimativamente dal valore di
a in ogni regione:
X
a(x) ≈
aj χj (x).
j
Possiamo esprimere ρ(x, 0) come
ρ(x, 0) =
X
ρj χj (x).
j
7
Joseph Liouville (1809-1882), matematico francese, aermò che, in meccanica hamiltoniana, nell'evoluzione
di un sistema conservativo, la derivata temporale della densità di stati nello spazio delle fasi è nulla, ovvero si
conserva anche la densità di stati nello spazio delle fasi. Matematicamente dρ(x,t)
= 0.
dt
60
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
Dall'equazione di Liouville segue che ρ(x, t) = ρ(x−t , 0), dove x−t è il punto dello spazio delle
fasi che evolve in x dopo un intervallo t. Quindi
X
ρ(x, t) =
ρj χj (x−t ).
j
Se inseriamo questa equazione nell'uguaglianza iniziale di questa sezione, troviamo
R
P P
j
k aj ρk χj (x)χk (x−t )dx
R
P
ha(x)it =
.
k ρk χk (x−t )dx
L'integranda al numeratore vale 1 se x è in ∆j e x−t è in ∆k , altrimenti vale 0. La seconda
condizione signica che x ∈ ∆k (t), dove ∆k (t) è la k -esima regione dopo un tempo t. L'integrale
diventa dunque
Z
χj (x)χk (x−t )dµ = µ(∆j ∩ ∆k (t)).
Siccome il sistema è mixing, si ottiene
µ(∆j ∩ ∆k (t)) →
µ(∆j )µ(∆k )
µ(ΓE )
quando t → ∞.
Il denominatore non dipende dal tempo e può essere approssimato:
XX
µ(∆j )µ(∆k )
1 X
1
lim ha(x)it = P
aj ρk
=
aj µ(∆j ) = ha(x)i.
t→∞
µ(ΓE )
µ(ΓE )
k ρk µ(∆k )
j
k
j
Con questo è stato mostrato come la media in funzione del tempo di un ensemble per qualsiasi
osservabile dinamica di un sistema mixing raggiunge il valore che ha all'equilibrio per t → ∞. Ciò
equivale a dire che, per un sistema mixing, la funzione di distribuzione, che dipende dal tempo
e dalla posizione nello spazio delle fasi, raggiunge il valore che ha all'equilibrio per t → ∞.
Lo stato rappresentato dalla densità ρ(x, 0) rappresenta una perturbazione dello stato di
equilibrio dato dalla densità ρ(x). Esso non denisce una misura invariante (come è il caso dello
studio degli stati di equilibrio), bensì è associato ad una misura che evolve nel tempo verso lo
stato di equilibrio.
4.7
L'entropia di Kolmogorov-Sinai
L'entropia di Kolmogorov8 -Sinai9 è una caratteristica propria dei sistemi dinamici deterministici
che assumono un comportamento caotico.
Supponiamo di avere un sistema dinamico discreto (Γ, f), con Γ bidimensionale, e immaginiamo di poter distinguere due punti nello spazio delle fasi se questi sono separati da una distanza
δ . Questo valore è detto parametro di risoluzione. Dato un sottoinsieme A ⊂ Γ di dimensione
8
Andrej Nikolaevi£ Kolmogorov (1903-1987) fu un matematico russo, conosciuto soprattutto per il suo contributo alla teoria delle probabilità. A partire dai suoi tre assiomi, sono stati formulati teoremi e leggi che oggi
costituiscono la base della teoria delle probabilità. La sua attività scientica si occupò anche della topologia, della
meccanica classica e, dopo il secondo conitto mondiale, della teoria dell'informazione.
9
Yakov Sinai, nato nel 1935, è un matematico russo-americano che si è occupato dei sistemi dinamici, riuscendo
a collegare il mondo dei sistemi deterministici a quello dei sistemi probabilistici. L'esempio del biliardo presentato
nella sezione 2.4.2 è simile al biliardo di Sinai. Il matematico riuscì a dimostrare che il sistema in questione è
ergodico, diventando così il primo uomo ad aver dimostrato questa proprietà.
4.7.
L'ENTROPIA DI KOLMOGOROV-SINAI
61
nell'ordine di δ , non possiamo distinguere i punti al suo interno. Tuttavia, se vi è una direzione
repulsiva, dopo n iterazioni della mappa f, il sottoinsieme A viene allungato lungo la direzione
repulsiva di un fattore eΛn . Ciò signica che due punti che si trovano inizialmente in A non sono
inizialmente distinguibili ma, con le iterazioni della mappa, la loro distanza aumenta esponenzialmente. Ne consegue che i punti all'interno di fn (A) sono distinguibili.
Quindi, se guardiamo le immagini successive di A, scopriamo in modo sempre più preciso la
posizione dei punti nel sottoinsieme iniziale. Notiamo quindi che l'informazione cresce a ritmo
esponenziale. Questo tasso di crescita è misurato dall'entropia di Kolmogorov-Sinai, notata hKS .
Data una partizione nita qualsiasi (vedere sezione 4.5.1) W = {W1 , ..., Wn } di Γ e uno stato
iniziale x0 , gli stati fn (x0 ) dell'orbita di x0 si trovano necessariamente in uno dei sottoinsiemi Wi .
La successione, composta dalla lista delle partizioni occupate dall'orbita, fornisce un'informazione sullo stato iniziale di x0 . L'entropia di Kolmogorov-Sinai corrisponde alla quantità media di
informazione ottenuta a ogni iterazione.
Prima di denire l'entropia, riportiamo un esempio di partizione che utilizzeremo nel seguito.
Consideriamo la mappa del panettiere analizzata nella sezione 3.2. Assumiamo che la partizione originale divida lo spazio delle fasi in due sottoinsiemi Wi con i = 0, 1 (gura 4.4). La
trasformazione inversa mappa questi due insiemi su f−1 (Wi ). Ciò signica che se x ∈ f−1 (Wi )
allora f(x) ∈ Wi . L'intersezione di Wi con f−1 (Wj ) porta a una nuova partizione dello spazio
delle fasi su quattro insiemi Wi ∩ f−1 (Wj ), con i, j = 0, 1:
W0
0
f−1
W1
1/2
Figura 4.4:
1
W00
0
W01
1/4
W10
1/2
3/4
W11
1
Costruzione delle partizioni per la mappa del panettiere.
W00 = {x|x ∈ W0 e f(x) ∈ W0 },
W01 = {x|x ∈ W0 e f(x) ∈ W1 },
W10 = {x|x ∈ W1 e f(x) ∈ W0 },
W11 = {x|x ∈ W1 e f(x) ∈ W1 }.
Questa partizione è composta dalle intersezioni delle partizioni W e f−1 (W ).
Grazie alle iterazioni di f, è infatti possibile costruire delle partizioni di Γ con una cardinalità
sempre più grande, ossia costituite da sempre più elementi. Questo si ottiene prendendo l'intersezione delle pre-immagini successive di una partizione con la partizione originale. La successione
delle partizioni generate da f
{{Wi }, {Wi ∩ f−1 (Wj )}, {Wi ∩ f−1 (Wj ) ∩ f−2 (Wk )}, ...}
62
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
è notata
W, W ∨ f−1 W, W ∨ f−1 W ∨ f−2 W, ...
dove W è la partizione originale.
L'iterazione di f fornisce delle partizioni di volta in volta più ni, quindi un punto x0 dato
in un insieme della partizione iniziale sarà di volta in volta maggiormente localizzato, poiché se
x0 ∈ Wi ∩ f−1 (Wj ) ∩ f−2 (Wk ), allora sappiamo che x0 ∈ Wi , f(x0 ) ∈ Wj e f2 (x0 ) ∈ Wk .
Ora che è stato chiarito il concetto di partizione, è possibile tornare all'entropia. Kolmogorov
e Sinai deniscono l'entropia di una partizione in termini di una misura normalizzata e invariante
sullo spazio delle fasi.
Data una partizione nita W , un punto x è meglio localizzato se si trova in un sottoinsieme Wi
di piccola misura µ(Wi ). Si introduce dunque la funzione informazione denita, per ogni x ∈ Γ,
da
n
X
I(W ; x) = −
ln[µ(Wi )]χWi (x),
i=1
dove χWi (x) è la funzione caratteristica di W e quindi
• I(W ; x) = −ln[µ(Wi )] se x ∈ Wi ;
• I(W ; x) = 0 se x 6∈ Wi .
L'entropia della partizione W è il valore medio di I(W ; x) rispetto alla misura µ:
Z
H(W ) =
Γ
I(W ; x)dµ(x) = −
con la normalizzazione
P
i µ(Wi )
n
X
ln[µ(Wi )]
Z
Wi
i=1
dµ(x) = −
n
X
µ(Wi )ln[µ(Wi )],
i=1
= 1. Quando la partizione è banalmente W = Γ, allora H = 0.
Per riprendere l'esempio della mappa del panettiere, le partizioni hanno entropia:
1 1 1 1
H1 ≡ H(W ) = − ln − ln = ln 2
2 2 2 2
1 1 1 1 1 1 1 1
H2 ≡ H(W ∨ f−1 W ) = − ln − ln − ln − ln = ln 4
|4 {z 4} |4 {z 4} |4 {z 4} |4 {z 4}
W00
W01
W10
W11
Hn+1 ≡ H(W ∨ f−1 W ∨ ... ∨ f−n W ) = ln 2n+1
Per determinare la quantità media di informazione acquisita ad ogni iterazione della mappa, si
denisce
1
h = lim Hn .
n→∞ n
Numericamente, si trova che una denizione più utile, ma equivalente, è
h = lim [Hn+1 − Hn ].
n→∞
Questa denizione dipende ancora dalla scelta della partizione. La denizione dell'entropia
di Kolmogorov-Sinai corrisponde al supremum di h su tutte le partizioni iniziali W nite:
hKS = sup h.
Wi
4.7.
L'ENTROPIA DI KOLMOGOROV-SINAI
63
Questa è una proprietà della mappa che, evidentemente, non dipende più dalla partizione W .
Un sistema dinamico per cui vale hKS > 0 è detto K -system , mentre una partizione per cui
vale h = hKS è chiamata partizione generante .
Per evitare il calcolo del supremum, è suciente scegliere una partizione W detta partizione
di Markov10 , ossia una partizione che soddisfa le seguenti proprietà:
◦
◦
(i) W i ∩ W j = ∅ per ogni i 6= j ;
(ii) i bordi di Wi coincidono con le direzioni attrattive e repulsive;
(iii) se x ∈ Wi e f(x) ∈ Wj , allora
f(Ex+ ∩ Wi ) ⊃ Ef+(x) ∩ Wj
e
f(Ex− ∩ Wi ) ⊂ Ef−(x) ∩ Wj
dove Ex+ è la retta che passa per x e che ha come vettore direttore l'autovettore di dilatazione,
mentre Ex− è ha come vettore direttore l'autovettore di restrizione.
In altre parole, ogni volta che l'immagine f(Wi ) di un elemento della partizione interseca un elemento della partizioneWj , l'immagine deve coprire completamente tale elemento nella direzione
repulsiva, mentre deve essere all'interno di tale elemento nella direzione attrattiva.
Concludiamo questa sezione riportando un utile teorema, detto teorema di Pesin11 .
Per un sistema dinamico chiuso e iperbolico, ossia tale che la mappa f è suriettiva e tale che
la misura è invariante (cioè µ(A) = µ(f−n (A)) per ogni A ⊂ Γ e n ∈ N), allora l'entropia di
Kolmogorov-Sinai di f è uguale alla somma degli esponenti di Ljapunov positivi associati a f.
hKS =
X
λi con λi > 0
i
Precedentemente abbiamo calcolato che, per una data partizione, Hn+1 = ln 2n+1 nel caso
della mappa del panettiere. Dimostreremo ora che la partizione che abbiamo scelto è una partizione di Markov, al ne di usare questa partizione per calcolare l'entropia.
(i) Tutti i sottoinsiemi Wi della partizione W sono disgiunti, pertanto l'intersezione della parte
interna di Wi e Wj equivale all'insieme vuoto.
(ii) Per la mappa del panettiere si osserva una dilatazione nella direzione orizzontale e una
restrizione in quella verticale. I sottoinsiemi Wi della partizione W sono dei rettangoli, i
cui bordi sono paralleli o perpendicolari ai lati del quadrato [0, 1]2 . Di conseguenza, i bordi
di Wi coincidono con le direzione attrattive e repulsive della mappa.
10
Andrej Andreevi£ Markov (1856-1922) fu un matematico e statistico russo, noto per i suoi studi nel campo della
teoria dei numeri, dell'analisi matematica, della teoria delle probabilità e della statistica. Fu attivo principalmente
a San Pietroburgo, dove studiò prima e divenne professore poi. Durante i tumulti studenteschi del 1908, i professori
dell'università di San Pietroburgo erano tenuti a controllare i loro allievi. Markov riutò questo compito e motivò
la sua scelta dicendo di non essere un agente del governo. Di conseguenza, gli fu vietato di continuare a insegnare.
Il nome partizione di Markov è dovuto al fatto che la dinamica del sistema in questione ubbidisce alla proprietà
di Markov.
11
Yakov Pesin è un professore di matematica all'Università della Pennsylvania. La sua attività scientica si
concentra soprattutto nel campo dei sistemi dinamici.
64
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
(iii) Non dimostreremo questa proprietà ma ci limiteremo a vericarla per un caso particolare.
Consideriamo il punto x = (x, y) in cui 41 < x < 12 . Il punto si trova quindi in W0 , mentre
f(x) ∈ W1 . L'immagine di Ex+ ∩ W0 sarà espansa su tutto la lunghezza orizzontale dello
spazio delle fasi, mentre nella direzione verticale la sua coordinata y sarà uguale alla metà
di quella del punto x.
Ef+(x) ha la stessa coordinata y di f(Ex+ ∩ W0 ). Otteniamo quindi f(Ex+ ∩ W0 ) = Ef+(x) . È
chiaro che Ef+(x) ∩ W1 è incluso in Ef+(x) , da cui consegue che la proprietà è vericata.
La gura 4.5 illustra la verica per questo caso particolare.
1
W0
W1
1/2
+
Ex
∩ W0
x
E + ∩ W1
f(x)
+
f(Ex
∩ W0 )
f (x)
0
1/2
0
Figura 4.5:
1
Verica che vale f(Ex+ ∩ W0 ) ⊃ Ef+(x) ∩ W1 per il caso particolare del punto
1
< x < 12 .
4
x
= (x, y) con
In modo analogo si verica la seconda condizione della proprietà (iii). La gura 4.6 riporta
la verica per il caso particolare in cui x = (x, y) con 21 < x < 34 .
1
−
Ex
∩ W1
f (x)
W0
−
f(Ex
∩ W1 )
W1
x
1/2
E − ∩ W0
f(x)
0
0
Figura 4.6:
1/2
1
Verica che vale f(Ex− ∩ W1 ) ⊂ Ef−(x) ∩ W0 per il caso particolare in cui
1
< x < 34 .
2
x
Siccome questa è una partizione di Markov, si ha
hKS = h = lim [Hn+1 − Hn ] = lim [(n + 1)ln 2 − n ln 2] = ln 2
n→∞
n→∞
= (x, y) con
4.8.
L' EQUAZIONE DI PERRON-FROBENIUS
65
Abbiamo quindi calcolato l'entropia di Kolmogorov-Sinai per la mappa del panettiere. Si osserva
che questo valore equivale all'esponente di Ljapunov calcolato per questa mappa nella sezione
3.2. Il risultato è quindi in accordo con il teorema di Pesin.
4.8
L' equazione di Perron-Frobenius
Intendiamo ora introdurre l'equazione di Perron12 -Frobenius13 che sarà necessaria per denire
l'equazione di Boltzmann e il teorema annesso detto teorema H .
Supponiamo di avere un sistema dinamico discreto (Γ; f) che presenta sensibilità alle condizioni iniziali. Consideriamo inoltre di avere una distribuzione di punti nello spazio delle fasi.
Dopo alcune iterazioni della mappa, la distribuzione cambia, siccome i punti si muovono nello
spazio delle fasi secondo la funzione f. Vista la sensibilità alle condizioni iniziali, è impossibile
prevedere l'evoluzione del sistema per tempi lunghi.
Tuttavia, ci possiamo chiedere se sia possibile avere delle indicazioni di carattere probabilistico
sui diversi punti dello spazio delle fasi. Ci domandiamo dunque se esista e come evolve una distribuzione di probabilità su Γ.
Consideriamo a tale scopo un ensemble statistico nello spazio delle fasi composto da N
punti che consideriamo delle condizioni iniziali xj0 e uniformemente distribuiti su Γ. La mappa f
genera le orbite O(xj0 ). Parallelamente consideriamo una partizione uniforme di Γ data da {Ak }
e consideriamo la frazione Nn,k di punti delle N orbite che all'iterazione n appartengono a Ak .
Allora, posto xk il centro di Ak e |δ x| la taglia di Ak , la funzione
ρn (xk ) =
numero di punti Nn,k in Ak in posizione xk dopo n iterazioni
numero totale di punti N per la dimensione di Ak
denisce una densità di probabilità. In altre parole, vengono generate N orbite dalle iterazioni
della mappa, ciascuna contenente n elementi. Abbiamo quindi N n punti. La funzione ρn (xk ) è
una frazione in cui si divide il numero di questi punti che si trovano nell'insieme Ak per la misura
di Ak (ossia δ x) e per il numero di orbite considerate, in questo caso N .
La funzione appena scritta, ρn (xk ), è normalizzata, ossia
P
X
Nn,k δ x
ρn (xk )δ x =
= 1,
N δx
P
dove
ρn (xk ) è la somma delle funzioni ρn di tutti gli elementi Ak della partizione.
Nel limite N → ∞ e |δ x| → 0 si ha
X
ρn (xk )δ x →
Z
Γ
ρ(x)dx = 1.
12
Oskar Perron (1880-1975) fu un matematico tedesco. Insegnò dapprima all'università di Heidelberg e poi a
quella di Monaco, dove rimasse dal 1922 no alla ne dei suoi giorni. La sua attività si concentrò soprattutto nel
campo delle equazioni dierenziali.
13
Ferdinand Georg Frobenius (1849-1917) fu un matematico tedesco conosciuto per il suo contributo allo studio
delle funzioni ellittiche e alla teoria dei gruppi. Frobenius nacque a Charlottenburg e studiò a Berlino, dove
conseguì un dottorato sulla soluzione di equazioni dierenziali. Tra il 1875 e il 1892 fu professore al Politecnico di
Zurigo, città in cui si sposò ed ebbe dei gli. Negli ultimi anni della sua vita, tornò a Berlino, sempre lavorando
come professore.
66
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
La questione è trovare un'equazione che descriva la dinamica della densità ρn (x) quando si
varia n, ossia un'equazione che dà delle informazioni su come cambia ρn (x) con le iterazioni della
mappa. Ponendo x0 = f(x), eettuiamo il cambio di variabile
ρ(x0 )dx0 =
ρ(x)dx
X
x|x0 =f(x)
e quindi
ρ(x0 ) =
ρ(x)
X
x|x0 =f(x)
1
.
| det Df(x)|
Se ora identichiamo ρn+1 (x0 ) = ρ(x0 ) e ρn (x) = ρ(x), si ha l'equazione che descrive la
dinamica della densità, che è detta equazione di Perron-Frobenius:
ρn+1 (x0 ) =
ρn (x)
X
x|x0 =f(x)
1
.
| det Df(x)|
Introducendo l'operatore di Perron-Frobenius
P ρ(x0 ) =
ρ(x)
X
x|x0 =f(x)
si ottiene
1
,
| det Df(x)|
ρn+1 (x) = P ρn (x).
Quest'ultima equazione assomiglia all'applicazione denita in modo ricorsivo xn+1 = f(xn ),
che descrive la dinamica dei singoli punti, mentre l'equazione di Perron-Frobenius descrive la
dinamica della distribuzione di probabilità, denita sulla base di un ensemble statistico di punti.
I punti ssi dell'operatore di Perron-Frobenius, ossia le densità di probabilità che soddisfano
ρ∗ (x) = P ρ∗ (x), sono dette densità invarianti. Esse permettono di caratterizzare le misure
invarianti di un sistema dinamico, cosa che ci sarà utile nella prossima sezione.
Citeremo ora un esempio di equazione di Perron-Frobenius di un sistema dinamico, mentre
un secondo esempio sarà esposto nella sezione successiva.
Nella mappa diadica, l'equazione di Perron-Frobenius vale
X
1
ρn+1 (x0 ) =
ρn (x0 ) .
2
−1 0
x|x=d
(x )
Per ogni x0 ∈ [0, 1], esistono due possibili x tali che x = d−1 (x0 ). Essi sono dati da x0 = 2x e
x0 = 2x − 1, quindi
0
0
x
x +1
1
0
ρn+1 (x ) =
ρn
+ ρn
.
2
2
2
Si osserva che la densità ρ(x) = 1, ossia costante, è l'unico punto sso normalizzato14 dell'operatore di Perron-Frobenius. Ciò signica che solo la distribuzione omogenea dei punti nello spazio
delle fasi possiede ρn (x) invariante.
14
Infatti vi è un'altra soluzione ρ(x) =
1
2
ma questa non è normalizzata.
4.9.
L'EQUAZIONE DI BOLTZMANN PER LA MAPPA DEL PANETTIERE
67
Di conseguenza, date delle condizioni iniziali qualsiasi uniformemente distribuite su Γ, si otterranno densità uguali in ogni sottoinsieme di misura δx, per n → ∞ e δx → 0.
A tal proposito, si osservi la gura 4.7 che rappresenta un esperimento numerico ottenuto con
Excel. In primo luogo sono state generate 72 condizioni iniziali in modo casuale. In seguito ne sono
state calcolate le orbite per le prime 45 iterazioni della mappa diadica, così da ottenere un totale
di 3 240 valori compresi tra 0 e 1. Sono poi stati creati 20 intervalli, ciascuno di misura δx = 0,05,
e per ognuno di essi si è contato quanti dei 3 240 valori appartenevano al dato intervallo. Il graco
della gura 4.7 riporta dunque il numero di valori appartenenti a ogni intervallo.
Figura 4.7:
Esperimento numerico della disposizione di 3 240 punti, appartenenti alle orbite di 72
condizioni iniziali, nello spazio delle fasi. Graco generato con Excel.
Si nota che la distribuzione è abbastanza omogenea e che ogni intervallo contiene circa 162
dei valori calcolati, ossia ogni intervallo ha circa la densità media di Γ. Questa immagine, benché
sia costruita solo con le prime 45 iterazioni a causa del problema informatico già trattato alla ne
della sezione 3.1, sostiene dunque quanto aermato riguardo alla densità di probabilità invariante.
4.9
L'equazione di Boltzmann per la mappa del panettiere
In meccanica statistica Boltzmann introduce la funzione di ripartizione F (x, v, t), denita sullo spazio delle fasi a una particella, notato Γ1 , di dimensione 6. Questa funzione è tale che
F (x, v, t)dxdv rappresenti il numero medio di particelle che si trovano nel volume dxdv localizzato attorno al punto (x, v) dello spazio delle fasi Γ1 . Si osservi che, dividendo F (x, v, t)dxdv
per il numero N di particelle, si ottiene una densità di probabilità f (x, v, t). Questa funzione,
nel caso di un gas all'equilibrio termodinamico, è semplicemente la funzione di ripartizione di
Maxwell-Boltzmann ben conosciuta.
Di grande importanza per quanto svilupperemo nel seguito è il fatto che la funzione F (x, v, t)
si ottiene a partire dalla funzione di ripartizione per le N particelle. In pratica si prende la funzione F (x1 , v1 , x2 , v2 , . . . , xN , vN , t), denita sullo spazio delle fasi Γ = ΓN
1 di dimensione 6N ,
e la si integra su N −1 particelle, ciò che comporta una drastica riduzione del numero di variabili.
Boltzmann trovò poi un'equazione cinetica che descrive l'evoluzione temporale della funzione
F (x, v, t). Essa, in termini di una dettagliata analisi microscopica, è basata in particolare sullo
studio delle collisioni, le quali modicano la velocità e la posizione delle particelle e provocano
68
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
quindi l'entrata e l'uscita di particelle da un dato volume nello spazio delle fasi. Inoltre questa
equazione si fonda su un'importante ipotesi (Stosszahlansatz ) per la quale le particelle che entrano in collisione non sono correlate (perdita di memoria dopo una collisione).
Lo scienziato austriaco scoprì in seguito che è possibile associare a F (x, v, t) un'appropriata
funzione H(t), denita come
Z Z
H(t) =
F (r, v, t) ln[F (r, v, t)]drdv,
la quale possiede la proprietà di essere decrescente, cioè ddHt ≤ 0. La derivata di H(t) si annulla nel caso in cui F (x, v, t) è data dalla funzione di ripartizione di Maxwell-Boltzmann, ciò che
corrisponde ad una situazione di equilibrio. Questo stato è caratterizzato da un bilancio nullo
tra le collisioni che provocano l'entrata delle particelle nel volume dello spazio delle fasi dxdv e
quelle che ne provocano l'uscita.
Costruiremo ora un modello simile per la mappa del panettiere. Essendo questo un modello semplice, il senso sico è abbastanza limitato. Lo spazio delle fasi bidimensionale della
mappa rappresenta le 6N dimensioni di un sistema termodinamico, mentre la riduzione a una
dimensione che faremo rappresenta le 6 dimensioni dello spazio ad una particella.
La funzione f, che determina l'evoluzione di un punto nella mappa del panettiere, è invertibile
e la sua inversa vale
(x/2, 2y)
se
y < 12
−1
f (x, y) =
((x + 1)/2, 2y − 1)
se
y ≥ 12
L'equazione di Perron-Frobenius si scrive, essendo la mappa biettiva denita nel quadrato
[0, 1]2 ,
ρn+1 (x) = ρn (f−1 (x))
esplicitamente
ρn+1 (x, y) =
se
se
ρn (x/2, 2y)
ρn ((x + 1)/2, 2y − 1)
y<
y≥
1
2
1
2
.
Consideriamo una densità ridotta, integrando sulla variabile y , che rappresenta la direzione
attrattiva:
Z 1
Z 1
Z 2
2
ρn−1 ((x + 1)/2, 2y − 1)dy
Wn (x) =
ρn (x, y)dy =
ρn−1 (x/2, 2y)dy +
0
0
1
2
e, ponendo il cambiamento di variabile y 0 = 2y nel primo integrale e y 0 = 2y − 1 nel secondo,
otteniamo
Z 1
1
1
1
x+1
Wn (x) =
ρn−1 (x/2, y 0 ) + ρn−1 ((x + 1)/2, y 0 )dy 0 =
Wn−1
+ Wn−1
.
2 0
2
2
2
L'equazione
x
1
x+1
Wn (x) =
Wn−1
+ Wn−1
2
2
2
è un'equazione di Boltzmann per la mappa del panettiere: essa permette di calcolare l'evoluzione temporale della densità di probabilità ridotta alla sola variabile x.
4.9.
L'EQUAZIONE DI BOLTZMANN PER LA MAPPA DEL PANETTIERE
69
Risolviamo l'equazione di Boltzmann scrivendo Wn (x) in serie di Fourier.
Wn (x) =
∞
X
ak (n)e2πikx
k=0
allora
∞
Wn+1 (x) =
∞
1X
x+1
x
x
1X
ak (n) e2πik 2 + e2πik 2 =
ak (n)e2πik 2 (1 + eπik)
2
2
k=0
e, poiché
eπik
k=0
= −1 per k dispari, mentre
eπik
∞
X
Wn+1 (x) =
= 1 per k pari, si ottiene
ak (n)e
2πik x2
=
k=0,pari
∞
X
a2` (n)e2πi`x .
`=0
Osserviamo la perdita con un'iterazione dei termini ak con k dispari. Nella successiva iterazione,
si perderanno i termini ak con k corrispondente a due volte un numero dispari e così via. Nel
limite n → ∞, l'unico termine che rimane è a0 che dà W∞ (x) = a0 costante. La densità di
probabilità ridotta converge verso una densità costante
W∞ (x) = 1.
Si noti che si sarebbe potuto dimostrare in modo analogo che la densità per la mappa diadica è
costante nel limite n → ∞.
La grandezza H introdotta da Boltzmann per il nostro modello discreto equivale a
1
Z
Hn =
Wn (x) ln Wn (x)dx.
0
L'evoluzione temporale di Hn è data da
Z
Hn+1 =
1
Wn+1 (x) ln Wn+1 (x)dx =
0
Z
0
1
x
x
1
x+1
1
x+1
Wn
+ Wn
ln
Wn
+ Wn
dx.
2
2
2
2
2
2
La funzione da integrare è della forma F ( a+b
2 ) con F (z) = z ln z . Poiché F è convessa, vale
1
a+b
x
x+1
2 (F (a) + F (b)) ≥ F ( 2 ) e, ponendo a = Wn ( 2 ) e b = Wn ( 2 ), si ha
Hn+1
1
≤
2
Z
1
Wn
0
x
2
ln Wn
x
2
+ Wn
x+1
2
ln
x+1
2
dx.
Inne, con il cambiamento di variabile x0 = x2 nel primo termine e x0 = x+1
2 nel secondo, si
ottiene
Z 1
Z 1
1 2
0
0
0
Hn+1 ≤
Wn (x ) ln Wn (x )dx +
Wn (x0 ) ln Wn (x0 )dx0 = Hn .
1
2 0
2
Abbiamo dunque ottenuto un teorema H per la mappa del panettiere:
Hn+1 ≤ Hn .
Osserviamo che se W è costante, allora H rimane pure costante. Ciò coincide con il raggiungimento di una densità ridotta che descrive un punto sso, ossia lo stato di equilibrio.
70
CAPITOLO 4. MECCANICA STATISTICA DEI SISTEMI DINAMICI
4.10
Meccanica statistica e caos
Per concludere questo lavoro di maturità, metteremo in relazione la proprietà di ergodicità e di
mixing con il caos.
Abbiamo detto, anché la funzione di un sistema dinamico isolato raggiunga il suo valore di
equilibrio, il sistema dovrebbe essere mixing. Questa condizione porta a delle proprietà dinamiche
tipiche di un comportamento caotico.
In primo luogo, un sistema mixing possiede la proprietà della transitività, perché, per denizione, un insieme A nello spazio delle fasi, inizialmente disgiunto da un altro insieme B , si
espanderà, dopo un intervallo t, su tutta la supercie di energia costante e quindi sarà tale che
At ∩ B 6= ∅.
La transitività deriva dall'ergodicità, proprietà che presenta ogni sistema mixing. L'ipotesi ergodica comporta anche il concetto dell'eterno ritorno nel corso dell'evoluzione temporale, l'orbita
del sistema nello spazio delle fasi deve passare innitamente vicino a ogni congurazione possibile, ossia a ogni punto nello spazio delle fasi.
Inne un sistema mixing è anche sensibile alle condizioni iniziali. Abbiamo detto che una
regione, non importa quanto piccola essa sia, dello spazio delle fasi di un sistema mixing si
espanderà, dopo un certo intervallo in modo uniforme sulla supercie di energia costante o, più in
generale, sull'insieme invariante di Γ dove è connata la dinamica. Ciò signica che due condizioni
iniziali appartenenti a questa regione si ritroveranno molto lontane nel corso dell'evoluzione del
sistema. Una dierenza iniziale molto piccola è quindi amplicata: siamo di fronte al fenomeno
della sensibilità alle condizioni iniziali tipico dei sistemi dinamici caotici.
Questo fenomeno di espansione corrisponde più concretamente alla richiesta che la descrizione
di un sistema termodinamico in equilibrio non debba risentire molto delle condizioni iniziali che
producono quello stato, poiché ogni regione dello spazio delle fasi (insieme di condizioni iniziali)
porterà a un simile stato macroscopico del sistema all'equilibrio.
Bibliograa
[1] A. Baldassarri.
[2] G. Benettin.
Temperatura, Energia, Entropia. Ediesse, 2012.
Introduzione alla teoria ergodica. Università di Padova, 2001.
[3] J. Briggs, D. Peat.
Die Entdeckung des Chaos. Deutscher Taschenbuch Verlag, 1993.
[4] J. R. Dorfman. An Introduction
Cambridge University Press, 1999.
[5] B. Eckhardt.
to Chaos in Nonequilibrium Statistical Mechanics.
Chaos. S. Fischer Verlag, 2004.
[6] C. Ferrari.
Sistemi dinamici. Liceo Locarno, 2014.
[7] C. Ferrari.
Fisica. Liceo Locarno, 2014.
[8] M. W. Hirsch, S. Smale, R. L. Devaney. Dierential
Introduction to Chaos. Academic Press, 2012.
Equations, Dynamical Systems, and an
[9] N. Lesmoir-Gordon, W. Rood, R. Edney. I frattali a fumetti. Raaello Cortina Editore, 2010.
[10] J. Marklof, C. Ulcigrai. Dynamical
[11] S. Prinz.
Systems and Ergodic Theory. University of Bristol, 2014.
Matematica. Liceo Locarno, 2014.
[12] D. Ruelle.
Caso e Caos. Bollati Boringhieri, 1992.
[13] I. Stewart.
Dio gioca a dadi?. Bollati Boringhieri, 1993.
[14] S. Tibaldi.
Che tempo farà?, in Le Scienze. Daniela Hamaui, numero 538, 2013.
[15] http://www.treccani.it/enciclopedia/determinismo (settembre 2014)
[16] http://it.cathopedia.org/wiki/Predestinazione (settembre 2014)
[17] http://www.wikipedia.org (dicembre 2014)
[18] http://www.maths.bristol.ac.uk/ maxcu/Doubling14.pdf (giugno 2014)
[19] http://www.math.uchicago.edu/wilkinso/papers/smoothergodictheory.pdf (dicembre 2014)
[20] http://www.mujeresdeempresa.com/del-caos-surge-el-orden (dicembre 2014)
71
Indice analitico
K -system, 63
Γ, 13, 15
A , 41
B , 42
σ -algebra, 41
di Borel, 42
Liber abbaci, 35
Crescita dell'informazione, 61
Cristianesimo, 2
Densità, 18, 26, 32, 37, 50
di probabilità, 65, 67, 68
Invariante, 66
Descrizione matematica dell'ergodicità, 48
Philosophiae Naturalis Principia Mathematica, Determinismo, 2, 4
Caotico, 9
2
Laplaciano, 4
Algebra, 41
Devaney Bob, 18
Approssimazione lineare, 16
Dieomorsmo, 51
Aristotele, 2
Dimensione di Hausdor, 39
Arnold Vladimir, 33
Dimensione frattale, 39
Attrattore, 7, 10, 27, 33, 38, 49
Dinamica newtoniana, 44
Ricostruzione, 11
Dio, 1, 2, 5
Descrizione matematica, 21
Dissipazione, 7, 15, 19, 22, 39
di Lorenz, 8
Distanza, 42
Strano, 18, 39, 40
Distribuzione di probabilità, 65
Autovalore, 16, 20, 29, 31, 34, 36, 37
Eetto farfalla, 9
Autovettore, 17, 21, 29, 34, 36, 52
Ensemble, 45, 47, 59, 60
Contrazione, 29, 34
Microcanonico, 45, 46, 48
Dilatazione, 29, 34
Entropia, 44
Bacino di attrazione, 22, 39
della partizione, 62
Base binaria, 27, 29, 32
di Boltzmann, 45
Bibbia, 1
di Kolmogorov-Sinai, 60
Biliardo, 19, 25
Equazione
di Sinai, 60
di Boltzmann, 65
Birkho George, 46
di Liouville, 59
Boltzmann Ludwig, 44
di Perron-Frobenius, 65, 68
Borel Felix, 42
Dierenziabile, 2
Equilibrio, 59, 60, 69, 70
Calvino, 5
Equilibrio termodinamico, 44, 45, 56
Cantor Georg, 39
Ergodicità, 44, 48, 56, 70
Cardinalità, 39, 61
nella mappa del panettiere, 52
Caso, 3
nella mappa diadica, 50
Causa nale, 2
nella mappa rotante, 51
Classe C 1 , 14
Esiodo, 1
Collisione, 44, 67
Esponente di Ljapunov, 6, 18, 20, 25, 31, 36, 63
Convezione atmosferica, 8
Eterno ritorno, 70
Cosmo, iii
Creazione, 1
Fibonacci Leonardo, 35
73
74
INDICE ANALITICO
Fourier Jean Baptiste, 51
FRACMAT, 10
Frobenius Ferdinand, 65
Funzione
Caratteristica, 47, 48, 62
di autocorrelazione, 58
di correlazione, 58
di ripartizione, 67
di Maxwell-Boltzmann, 67
Informazione, 62
Geometria frattale, 13, 19, 39
Gibbs Josiah, 55
Gradi di libertà, 8, 9
Gran Bretagna, 40
Hausdor Felix, 39
Indipendenza dalle condizioni iniziali, 22, 70
Induismo, 2
Industriale, 10
Insieme
di tipo Cantor, 39
Disgiunto, 42
Misurabile, 41
Ipotesi ergodica, 44, 45
Irreversibilità, 44, 45
Islam, 2
Jacobi Carl, 16
Jung Carl, iii
Kolmogorov Andrej, 60
Laplace Pierre-Simon, 3
Libero arbitrio, 4
Linearizzazione, 14
Liouville Joseph, 59
Livello macroscopico, 44
Livello microscopico, 44
Ljapunov Aleksander, 20
Lorenz Edward, 8
Mappa, 13, 17
Bidimensionale, 15
del panettiere, 28, 43, 52, 55, 61, 62, 68
Dissipativa, 38
di Arnold, 33, 58
di classe C 1 , 17
Diadica, 23, 43, 50, 66, 69
Rotante, 42, 50, 51, 58
Unidimensionale, 13
Markov Andrej, 63
Matrice
Aggiunta, 21
di Jacobi, 15, 20, 28, 33, 34, 39
Simmetrica, 35, 37
Meccanica, 2
Classica, 3, 44
Deterministica, 4
Statistica, 3, 41
Media
Statistica, 48, 49
Temporale, 48, 49
Meteorologia, 7
Metodo di Ruelle-Takens, 11
Misura, 41
Finita, 42
Invariante, 42
Mitologia, 1
Modulo, 23
Morbillo, 10
Newton Isaac, 1
Operatore di Perron-Frobenius, 66
Orbita, 14, 15, 23, 46
Periodica, 13, 14, 24, 30, 34, 46, 51
Attrattiva, 14, 17
Densa, 18, 26, 31, 32, 37
Repulsiva, 14, 17, 24
Repulsiva iperbolica, 17
Parametro di risoluzione, 60
Partizione, 50
Microcanonica, 45
di Markov, 63, 64
Generante, 63
Perdita di memoria, 68
Perron Oskar, 65
Pesin Yakov, 63
Poincaré Henri, 9, 49
Predestinazione, 5
Previsioni, 5, 7, 9, 10
Principio di indeterminazione di Heisenberg, 3
Problema dei tre corpi, 49
Proiettore, 36
Punto
di equilibrio, 6, 16
Fisso, 1316, 19, 23, 26, 30, 69
Attrattivo, 1416, 22
Iperbolico, 29
Periodico, 26
INDICE ANALITICO
Repulsivo, 1416, 23
Repulsivo iperbolico, 16
Periodico, 13, 14, 17, 31, 32, 35
Ricorrente, 49
Vagante, 49
Quantistica, v, 14
Relatività, v
Reversibilità temporale, 44
Risotto, 55
Ruelle David, 6
Russel Bertrand, 36
Misurabile, 41
Spazio delle fasi, 7, 8, 46, 56
Ricostruzione, 10, 11
SRAMA, 11
Stabilità, 7, 14, 17
del sistema solare, 9
delle orbite periodiche, 34
Stato
di equilibrio, 44, 70
Microcanonico, 45
Stosszahlansatz, 68
Successione, 30, 31, 39
di Fibonacci, 35
San Tommaso d'Aquino, 5
Tempo
Sant'Agostino, 5
di ricorrenza, 49
Saturno, 7
di soggiorno, 49
Schrödinger Erwin, 4
Teogonia, 1
Scomponibilità metrica, 50, 56
Teorema
Secondo principio della termodinamica, 44
H , 65, 69
Sensibilità alle condizioni iniziali, 6, 8, 18, 46,
della ricorrenza, 49
65, 70
di Birkho, 46, 49, 52, 53
Caso unidimensionale, 19
di Pesin, 63
Mappa del panettiere, 31
Ergodico, 46
Mappa diadica, 25
Spettrale, 36
Caso bidimensionale, 20
Thom René, 4
Mappa di Arnold, 36
Toro, 33, 38
Serie di Fourier, 51, 69
Transitività, 18, 25, 31, 37, 70
Serie temporale, 11
Trasformazione
Sinai Yakov, 60
Misurabile, 42
Sistema
Preserva la misura, 42
Aleatorio, 4
Caotico, 9, 13, 19, 23, 28, 33, 38, 70
Zaerano, 55
Complesso, 5
Conservativo, 15, 29, 34, 44
Deterministico, 6
Dinamico, 4, 6, 13
Chiuso, 63
Iperbolico, 63
Non lineare, 13
Dissipativo, 7, 15, 39
Ergodico, 46, 47, 51, 56
Evoluzione, 2, 10
Mixing, 55
Solare, 9
Stabile, 7
Termodinamico, 68
Spazio
di misura, 41, 42
di probabilità, 42
Metrico, 42
75