alimentazione 220/380 V")
CLASSE 3^ AFL
ANNO SCOLASTICO 2013/14
M.A.T. da i CV con 4 poli ( 2 coppie polari ) alimentazione 220/380 V;
n° 36 cave;
n° 18 matasse, composte da 88 spire con diametro del cavo da 0,65 mm;
n° 3 cave per polo e per fase; q = n° cave /( n° fasi × n° poli ) ;
36/ ( 3 ×4 ) = 3
passo dell’avvolgimento 1/ 10;
passo polare = 9 τ = n° cave/ n° poli ; 36/ 4 = 9;
COSTRUZIONE DI UN M.A.T.
ALUNNI:
1
COSTRUZIONE DELLE MATASSE
La prima operazione riguarda la costruzione delle 18 matasse alla macchina
matassatrice con cavo di rame smaltato da 0,65 di diametro.
E’ consigliabile distinguere le varie matasse numerandole con carta adesiva per
evitare che nella fase di infilaggio dei conduttori nelle apposite cave si
commettano errori nei collegamenti.
Le cave dello statore sono del tipo semichiuso, è necessario rivestire la cava con
del cartoncino isolante che sbordi per isolare la stessa ed evitare che il conduttore
nell’infilaggio deteriori l’isolamento.
Ultimata questa fase si procede alla chiusura delle cave inserendo dei tegolini
chiudacava in mylar.
Tenendo sempre ben presente lo schema degli avvolgimenti, si eseguono i
collegamenti elettrici, avendo cura di eliminare la resina isolante dei conduttori prima
della saldatura a stagno, poi si isolano i testimoni delle saldature con tubetto
sterlingato.
Eseguita tale operazione rimangono solo 6 terminali; 3 principi e 3 fini.
2
E’ raccomandabile inserire un diaframma di carta isolante nella parte laterale tra
una matassa e l’altra.
Si procede alla legatura con del cordino paraffinato per compattare le parti laterali
delle matasse in maniera da evitare eventuali interferenze col rotore dovute alle
vibrazioni.
3
Si procede in morsettiera ai collegamenti tra gli avvolgimenti del motore e la rete
di alimentazione inserendo le piastrine per il collegamento delle fasi a stella o
triangolo. Si esegue la prova di isolamento con un megaohmetro collegando un
morsetto dell’apparecchio alla carcassa del motore e l’altro ad una delle fasi, si fa
ruotare la manovella e se si legge sulla scala un valore che tenta all’infinito.
Non essendoci dispersioni, si può procedere al collaudo finale.
4
L’ultima fase prevede l’assemblaggio di tutti i componenti del motore avendo cura
di serrare bene i tiranti e assicurarsi che il rotore sia libero di ruotare, adesso si
può collegare il M.A.T. al banco prova per il collaudo finale che è risultato
conforme alle aspettative.
W2
O
O
U1
U2
O
O
V1
Stella
V2
O
W2
O
U2
O
V2
O
O
W1
O
O
V1
O
W1
U1
Triangolo
COLLEGAMENTI DELLA MORSETTIERA
5
6
CENNI STORICI
Galileo Ferraris nasceva il 30 ottobre 1847 a "Livorno Piemonte" poi ribattezzato
Livorno Ferraris in suo onore, moriva nella sua casa di Torino, in via XX settembre 46,
il 7 febbraio 1897.
Si laurea in ingegneria e diventa assistente di fisica tecnica al Regio Museo Industriale
Italiano (poi Politecnico di Torino).
Nel 1885 dimostra sperimentalmente in pubblico il
risultato
dei suoi studi: l'esistenza di un campo magnetico rotante
generato mediante due bobine fisse, tra loro perpendicolari,
percorse da correnti isofrequenziali in quadratura; un
cilindretto di rame, immerso nel campo magnetico, si mette
in movimento, tra la meraviglia dei presenti, sotto l'azione
delle forze elettrodinamiche tra campo rotante e correnti
indotte.
E' l'inizio del motore asincrono.
Galileo Ferraris pubblica la teoria del motore asincrono
sulla rivista L'Elettricità, soltanto dopo tre anni, nell'aprile
del 1888.
Nel mese di maggio dello stesso anno, Nicola Tesla
deposita in America cinque brevetti sulla costruzione dei
motori asincroni.
Innegabile il primato scientifico di Galileo Ferraris sul
principio di funzionamento e sulle basi teoriche del motore
asincrono che Tesla utilizza per la sua costruzione su base
industriale
(i brevetti furono acquistati dalla Westinghouse).
7
Galileo Ferraris non ne fu amareggiato: "Ho visto a Francoforte che tutti
attribuiscono a me la prima idea, il che mi basta. Gli altri facciano pure i
denari, a me basta quel che mi spetta, il nome".
Al convegno internazionale di elettricità che si tenne a Chicago, nell'agosto 1893, fu da
tutti riconosciuto che la scoperta del campo magnetico rotante era dovuta al genio di
Galileo Ferraris.
L' invenzione del motore asincrono e i suoi studi sul funzionamento e sul rendimento dei
trasformatori cambiarono il mondo .
Motore elettrico
Per motore elettrico si definisce una macchina elettrica in cui la potenza di ingresso
sia di tipo elettrico e quella di uscita sia di tipo meccanico. I motori elettrici hanno
importanza fondamentale nella società moderna, tanto è vero che la popolazione dei
motori elettrici di un paese ne determina il suo sviluppo. Inoltre l'andamento, ovvero
l'aumento o la diminuzione della popolazione dei motori elettrici è uno dei fattori
utilizzati per valutare il livello di crescita tecnologica di tale paese. Per verificare ciò
basti pensare a tutti gli oggetti che normalmente ci circondano, dal treno al frullatore,
dal walkman alla lavatrice e via dicendo, di cui la società moderna fa ampio uso e che
si può dire mettano in moto la nostra vita.
Parti principali:
Statore
Rotore
Campo magnetico
] Funzionamento:
La corrente elettrica passa in un avvolgimento di spire che si trova su un pezzo di
ferro dolce chiamato rotore. Questo avvolgimento, composto da fili di rame, crea un
campo elettromagnetico al passaggio di corrente. Questo campo elettromagnetico è
immerso in un altro campo magnetico creato dallo statore, il quale è caratterizzato
dalla presenza di due o più coppie polari (calamite, elettrocalamite, ecc.). Il rotore per
induzione elettromagnetica inizia a girare, in quanto il "nord" del campo magnetico
del rotore è attratto dal "sud" del campo magnetico dello statore e viceversa. Ogni
mezzo giro la polarità cambia, in modo da dare continuità alla rotazione. Questo
motore funziona a corrente alternata, per il motore a corrente continua vedere nelle
voci correlate. Durante la trasformazione dell'energia in piccola parte viene dispersa
per l'effetto Joule.
8
Motore asincrono
Il motore asincrono è un tipo di motore elettrico in corrente alternata in cui la
frequenza di rotazione non è uguale o un sottomultiplo della frequenza di rete, ovvero
non è "sincrono" con essa; per questo si distingue dai motori sincroni. Il motore
asincrono è detto anche motore ad induzione in virtù del suo principio di
funzionamento descritto di seguito.
Il motore si compone di una parte fissa detta statore e una parte mobile detta rotore,
ambedue di forma cilindrica. In ambedue le parti, delle quali lo statore contiene il
rotore, sono praticati dei fori paralleli all'asse del cilindro, detti cave, destinati ad
ospitare gli avvolgimenti, ovvero l'insieme dei conduttori.
Lo statore ospita normalmente un avvolgimento trifase, i cui conduttori sono
distribuiti nelle cave in modo che una terna di correnti sinusoidali nel tempo produca
una distribuzione spaziale di campo magnetico sinusoidale rotante. Il rotore è dotato
di un certo numero di fasi m di norma chiuse in corto circuito.
Tale rotazione del campo magnetico avviene ad una velocità fissa n legata alla
frequenza di alimentazione f, detta velocità di sincronismo. Per qualunque velocità di
rotazione del rotore nr diversa da quella di sincronismo la velocità dell'onda di campo
magnetico di statore rispetto al rotore è nr-n. Il rotore quindi è soggetto da parte dello
statore ad un campo magnetico variabile a frequenza nr-n, giacché l'onda ruota, e
quindi sarà sede di forze elettromotrici indotte, da qui la dizione motore a induzione,
e dunque correnti alla stessa frequenza nr-n. Le correnti di rotore produrranno un'altra
onda di campo magnetico rotante, ma rotante a velocità nr-n rispetto al rotore che
ruota a velocità nr rispetto allo statore, per cui il campo di rotore ruota a velocità n
rispetto allo statore ed è dunque sincrono con il campo di statore. Tale condizione di
sincronismo tra le due onde di campo magnetico assicura che il motore produca una
coppia costante. Unica eccezione, se il rotore gira al sincronismo, cioè n=nr, in esso
non vi sono forze elettromotrici quindi non vi sono correnti e dunque la coppia è
zero. Diversamente, la mutua interazione attraverso i relativi campi magnetici tra le
correnti di rotore e quelle di statore produce una coppia risultante netta.
La velocità n alla quale il motore non produce coppia, detta velocità di sincronismo.
Essa non viene usualmente superata ed è legata alla frequenza f di alimentazione e al
numero di coppie polari p dalla relazione:
Per esempio, un motore con tre coppie polari (6 poli totali), alimentato a 50 Hz ha
una velocità angolare di sincronismo di 1000 giri al minuto.
La velocità reale in condizioni nominali è sempre minore di circa il 3-6%, è il
fenomeno dello scorrimento che consente la produzione della coppia. Dalla formula
dello scorrimento posso esprimere la velocità di rotazione effettiva del rotore (nr):
9
Ovviamente il valore effettivo dello scorrimento dipende dal carico di fatto presente.
Il carico non è mai zero perché sono sempre presenti i fenomeni dell'attrito e della
ventilazione che impediscono al motore di ruotare alla velocità di sincronismo,
impegnando una certa coppia.
Gli avvolgimenti statorici sono in genere inglobati in resine che garantiscono
un'ottima protezione dall'acqua e dagli agenti atmosferici. Questi motori sono
frequentemente alimentati per mezzo di inverter elettronici che possono variarne la
velocità variando in modo coordinato la frequenza e la tensione di alimentazione.
L'uso di inverter permette di azionare il motore anche a partire da una corrente
continua, come avviene nella trazione ferroviaria.
Gli avvolgimenti statorici trifase possono essere collegati a stella oppure a triangolo,
permettendo di alimentare lo stesso motore con tensioni trifase di 400 e 230 Volt. In
alcuni grossi motori si preferisce avviare a stella e poi commutare a triangolo, al fine
di limitare le correnti di spunto, quando non sono utilizzati gli inverter.
Esistono motori asincroni di potenza usualmente inferiore a 1 kW alimentati anche
con tensioni monofase. Tali motori possono essere dotati di ordinari avvolgimenti a
due fasi, dove per alimentare la seconda fase si usa il ritardo di tempo introdotto da
un condensatore. Per potenze piccolissime si usano i motori in cui la seconda fase è
un circuito spazialmente asimmetrico chiuso in corto circuito (motori a "polo
shuntato")
I motori asincroni operano normalmente con gli avvolgimenti di rotore chiusi in corto
circuito ma il rotore può essere eseguito in costruzioni differenti.
A gabbia di scoiattolo
Il circuito rotorico è costituito da barre di alluminio pressofuse direttamente nelle
cave collegate tra loro da due anelli di alluminio. Si tratta quindi di un circuito in cui
il numero di fasi è pari al numero di barre e che è per costruzione in corto circuito.
Questi motori sono largamente utilizzati nell'industria in quanto affidabili ed
economici.
Storicamente particolari costruzioni della gabbia (doppia gabbia, cava profonda)
soddisfacevano le esigenze di avviamento dei motori di grossa taglia.
A rotore avvolto
Questo tipo di motore è simile al precedente, con la differenza che il rotore è
costituito da un ordinario avvolgimento trifase simile a quello di statore i cui
terminali fanno capo a tre anelli coassiali con il rotore. Su questi anelli strisciano
delle spazzole fisse collegate ai morsetti rotorici.
10
Storicamente i morsetti rotorici venivano collegati ad un reostato. Variando la
resistenza elettrica del reostato si poteva aumentare la resistenza dei circuiti rotorici
spostando la coppia massima verso lo scorrimento unitario (s=1 -> rotore fermo), in
modo da disporre in fase di avvio del motore della coppia di spunto massima
disponibile. Questo metodo serve ad avviare motori di medie dimensioni (10-300
kW). Dopo la partenza del motore le resistenze reostatiche vanno staccate dopo aver
opportunamente cortocircuitato i circuiti rotorici. In particolare, se le resistenze
reostatiche vengono collegate ai circuiti rotorici la curva di coppia si modifica perché
la coppia massima si sposta verso la scorrimento unitario e quindi si ottiene un punto
di lavoro a velocità inferiore (uso delle resistenze reostatiche per regolare la velocità).
Attualmente i motori asincroni a rotore avvolto sono applicati convenientemente,
insieme ad inverter, in unità motrici o generatrici a velocità variabile in cui
l'intervallo di variazione della velocità è piccolo. Il caso più tipico e diffuso è quello
dei generatori eolici.
Prova a vuoto del motore asincrono
Serve per la determinazione delle perdite meccaniche e le perdite nel ferro, oltre che
della corrente assorbita a vuoto (col relativo fattore di potenza). Inoltre permette di
determinare i parametri trasversali del circuito equivalente semplificato.
Viene condotta alimentando il motore con frequenza nominale ed i risultati vanno
riferiti alla tensione nominale, infatti le perdite nel ferro dipendono sia dalla tensione
che dalla frequenza e le perdite meccaniche dipendono dalla velocità e, quindi, dalla
frequenza.
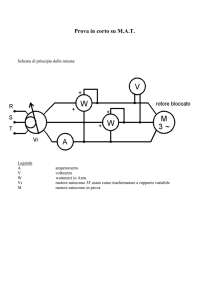
Il circuito di misura è il seguente:
Tutti gli strumenti di misura impiegati devono essere per corrente alternata e
frequenza pari a quella di prova, inoltre la loro classe di precisione deve essere pari a
0,5 o migliore, così che si possano trascurare gli errori sistematici strumentali e si
possa tenere conto unicamente degli errori sistematici d'autoconsumo (che andranno
corretti in relazione al tipo d'inserzione impiegato nella prova). L'alimentazione del
circuito di misura deve essere del tipo trifase, simmetrica con forma d'onda
sinusoidale.
Il voltmetro, inserito tra due fili di linea per misurare la tensione concatenata, verifica
il valore della tensione applicata.
11
I tre amperometri servono a misurare la corrente assorbita a vuoto ed a verificare che
per le tre fasi sia pressoché la stessa (eventuali marcate differenze significherebbero
un difetto di costruzione del motore).
I due wattmetri servono a misurare la potenza assorbita dal motore. Si osserva che
sono inseriti secondo Aron, questo perché il motore funzionante a vuoto costituisce
un sistema equilibrato. Inoltre, siccome il f.d.p. per un motore a vuoto è tipicamente <
0,5 , ci si deve attendere un'indicazione negativa dal secondo wattmetro.
L'inserzione adottata è del tipo con le voltmetriche a monte, questo perché il motore a
vuoto è assimilabile ad un'impedenza di grande valore e tale inserzione favorisce
errori d'autoconsumo più piccoli (in ogni caso tali errori verranno corretti).
Come è stato visto dalla teoria, esistono diverse tecniche per separare le perdite nel
ferro da quelle meccaniche, per il momento prendiamo in considerazione il metodo
della interpolazione grafica che richiede di condurre diverse prove a vuoto a
frequenza nominale e con tensioni decrescenti a partire da un valore V 1,1·Vn fino
ad un valore Vmin tale per cui non avvenga un rallentamento apprezzabile del
motore.
Per ciascuna delle prove si determineranno:
V [V]
direttamente indicata dal voltmetro.
essendo A1, A2, A3 le indicazioni degli amperometri.
(PFe + Pm) = W1 + W2 - (2·RWA·Io2 + 3·RA·Io2) - 3·RSYt·Io2 [W]
essendo RWA [] la resistenza interna amperometrica di ciascun wattmetro (uguale
per entrambi), RA [] è la resistenza interna degli amperometri (uguale per tutti e tre)
e 3·RSYt·Io2 [W] la potenza che la corrente a vuoto dissipa negli avvolgimenti
statorici (non più trascurabile rispetto alla corrente nominale a causa del suo elevato
valore dovuto all'elevata riluttanza del circuito magnetico originata dall'elevato
traferro presente tra lo statore ed il rotore) dove la resistenza equivalente a stella è
alla temperatura di prova.
avendo supposto equilibrato il comportamento del circuito.
b) perdite nel ferro e meccaniche in funzione della tensione applicata:
12
dalle quali, come già visto in teoria, si ricavano PFen , Pm , (Pfe + Pm)n. L'operazione
può risultare facilitata se le perdite vengono riportate in funzione del quadrato della
tensione, infatti in tal caso la caratteristica è rettilinea e ne viene facilitata
l'estrapolazione fino al valore zero di tensione.
La caratteristica ha andamento parabolico perché le perdite nel ferro, a parità di
frequenza, dipendono dal quadrato dell'induzione e, quindi, della tensione applicata.
Dalle caratteristiche tracciate si determinano le seguenti grandezze riferite alla
tensione e frequenza nominali:
Pm [W] , PFen [W] , (Pm + PFe)n [W]
equilibrato Tali valori andranno confrontati con quelli forniti dalle tabelle dei
costruttori al fine di valutare la bontà del comportamento a vuoto del motore provato.
Si possono poi determinare i parametri trasversali del circuito elettrico equivalente
semplificato:
13
Prova a rotore bloccato del motore asincrono
Serve per la determinazione delle perdite sotto carico, oltre che della corrente di
avviamento (col relativo fattore di potenza). Inoltre permette di determinare i
parametri longitudinali del circuito equivalente semplificato.
Viene condotta alimentando il motore con frequenza nominale e tensione ridotta
(tensione di cortocircuito) così che il motore assorba la corrente nominale, infatti le
perdite nel rame dipendono dalla corrente mentre la reattanza di dispersione dipende
dalla frequenza.
Questa prova viene anche chiamata
prova di cortocircuito a causa dell'analogia col trasformatore in corto (infatti, a rotore
bloccato s = 1 e la resistenza fittizia di rotore vale zero).
Il circuito di misura consigliato è il seguente:
Tutti gli strumenti di misura impiegati devono essere per corrente alternata e
frequenza pari a quella di prova, inoltre la loro classe di precisione deve essere pari a
0,5 o migliore, così che si possano trascurare gli errori sistematici strumentali e si
possa tenere conto unicamente degli errori sistematici d'autoconsumo (che andranno
corretti in relazione al tipo d'inserzione impiegato nella prova).
L'alimentazione del circuito di misura deve essere del tipo trifase, simmetrica con
forma d'onda sinusoidale.
Il voltmetro, inserito tra due fili di linea per misurare la tensione concatenata, verifica
il valore della tensione di cortocircuito.
L' amperometro serve a verificare che la corrente assorbita sia quella nominale.
I due wattmetri servono a misurare la potenza assorbita dal motore. Si osserva che
sono inseriti secondo Aron, questo perché il motore funzionante a rotore bloccato
costituisce un sistema. Inoltre, siccome il f.d.p. per un motore in cortocircuito è
piuttosto basso (anche se non come quello a vuoto), ci si deve attendere
un'indicazione negativa dal secondo wattmetro.
L'inserzione adottata è
del tipo con le voltmetriche a valle, questo perché il motore a rotore bloccato è
assimilabile ad un'impedenza di piccolo valore e tale inserzione favorisce errori
d'autoconsumo più contenuti (in ogni caso tali errori verranno corretti).
Se non interessano le caratteristiche di cortocircuito è possibile fare una sola prova
alla frequenza nominale e con applicata quella tensione ridotta che determina
l'assorbimento della corrente nominale, diversamente si faranno tante prove a partire
da una corrente di circa I = 1,1·In [A] per poi arrivare a tensione applicata nulla. E'
preferibile procedere riducendo le correnti al fine di favorire un migliore
14
raffreddamento degli avvolgimenti e poter così considerare tale temperatura costante
e pari a quella ambientale.
Per ciascuna delle prove si determineranno:
VCCt [V]
direttamente indicata dal voltmetro.
I [A]
direttamente indicata dall'amperometro.
dove RWV [] la resistenza interna voltmetrica di ciascun wattmetro (supposta uguale
per entrambi), RV []è la resistenza interna del voltmetro,
[W]
sono le perdite nel ferro che non si possono trascurare essendo nei motori la tensione
di cortocircuito non trascurabile rispetto alla tensione nominale (a causa dell'elevata
impedenza interna dovuta alla elevata reattanza di dispersione). Tali perdite sono
presenti sia nello statore che nel rotore (essendo questo fermo e quindi tagliato dal
campo rotante) e, considerando che la massa di ferro rotorica equivale alla massa di
ferro statorica, poste pari al doppio di quelle presenti a vuoto (ricondotte alla tensione
applicata secondo la nota legge di dipendenza quadratica).
avendo supposto equilibrato il comportamento del circuito.
Grazie ai valori sopra calcolati, si possono determinare le seguenti caratteristiche di
cortocircuito:
a) tensione di cortocircuito in funzione della corrente assorbita:
15
Vcc: In = Vn : Icc
Icc = In * Vn / Vcc
La caratteristica ha andamento pressoché rettilineo in quanto la tensione applicata
risulta essere direttamente proporzionale alla corrente assorbita VCCt = 1,732·Ze'·I .
Questo purché si trascuri la presenza dei rami trasversali e si assumano costanti Re'
ed Xe'. Per quanto riguarda la resistenza, essa può essere ragionevolmente ritenuta
costante solo se la temperatura degli avvolgimenti non varia durante la prova. .
. Il procedimento per il caso del motore è più semplice di quello visto per il
trasformatore non essendo richiesta la separazione delle perdite Ohmiche da quelle
addizionali (infatti, nei motori, le perdite addizionali sono convenzionalmente
calcolate come lo 0,5% della potenza elettrica assorbita). I passaggi sono i seguenti:
in quanto la reattanza di dispersione non dipende dalla temperatura.
16
 alimentazione 220/380 V")