UNIVERSITA’ DEGLI STUDI DI PARMA
Scuola di Specializzazione per l’Insegnamento Secondario
VIII ciclo a.s. 2006-2007
Indirizzo F.I.M.
Didattica della Fisica con Laboratorio I
Laboratorio di Didattica della Fisica I
UNITA’ DIDATTICA
SISTEMA MASSA-MOLLA
Raschellà Raffaella
Gruppo di studio III: Mariani Flavia
Meli Claudio
Raschellà Raffaella
Previ Giuseppina
1
Introduzione
Scopo di questa unità didattica è lo studio della forza elastica. In particolare, si studierà il
comportamento di molle elicoidali, sia nel caso statico, sia nel caso dinamico.
Questa unità didattica è destinata a:
Istituto scolastico: Liceo Scientifico.
Anno scolastico: Terzo.
Schema dell’unità didattica
Prerequisiti
unità di misura: utilizzo e conversione
proporzionalità diretta
rappresentazione grafica di una legge lineare e significato della pendenza della retta
funzioni trigonometriche
moto circolare uniforme
grandezze fisiche: posizione, velocità, accelerazione, forza, massa, lavoro, energia cinetica
relazione tra il peso e la massa di un oggetto
II e III principio della dinamica
Forze conservative: energia potenziale, conservazione dell’energia meccanica
Obiettivi
Obiettivi generali:
Ricavare una legge dai dati sperimentali
Verificare una legge sperimentalmente
Obiettivi metodologici:
Rappresentare i dati su un grafico
Presentare e discutere i risultati sperimentali in una relazione
Uso di una bilancia digitale
Uso del software Curve Expert per rappresentare e interpolare i dati
Uso del software DataStudio per acquisire i dati
Obiettivi specifici:
Legge di Hooke
Legge oraria di un oscillatore armonico
Energia cinetica e potenziale di un sistema massa-molla
2
Fasi
FASE
1
TIPOLOGIA
verifica in
classe
1h
attività di
laboratorio
2h
DESCRIZIONE
test di ingresso: verifica dei
prerequisiti
PREREQUISITI
quelli dell’unità didattica
OBIETTIVI
capire quali prerequisiti
richiedono ripasso
misura delle elongazioni di
pesi di massa diversa
appesi a una molla, in
condizioni di equilibrio
unità di misura e
conversione;
proporzionalità diretta e
rappresentazione grafica
posizione, massa, peso
equilibrio
utilizzo del software di
acquisizione
riconoscere il legame tra lo
studio di x(P) e di
Fmolla(x)
dedurre dai dati la
dipendenza lineare tra Fmolla
e x
3
lezione
frontale
2h
Legge di Hooke
Oscillatore armonico
Energia potenziale elastica
posizione, velocità,
accelerazione
II principio della dinamica
funzioni trigonometriche
4
attività di
laboratorio
1h
precedenti +
III principio dinamica
5
attività di
laboratorio
1h
6
verifica in
classe
1h
misura della posizione,
della velocità e
dell’accelerazione al variare
del tempo di una massa in
moto soggetta a una forza
elastica
Analisi dati presi in lab:
verifica della conservazione
dell’energia meccanica e
discussione
test di uscita: verifica della
comprensione dei contenuti
dell’unità didattica
legge oraria di un corpo
soggetto a una forza
elastica
lavoro ed energia
potenziale della forza
elastica
verificare la legge oraria di
un corpo soggetto a una
forza elastica
studiare le proprietà del
moto armonico
2
comprensione delle attività
precedenti
discutere criticamente le
discrepanze tra dati
sperimentali e attesi
fissare i contenuti
Scheda insegnante
Teoria
Una forza F lineare nella posizione e diretta in verso opposto allo spostamento x è detta forza elastica e
si può scrivere nella forma:
F=-kx
dove k è detta costante elastica. Una legge di questo tipo, che lega in modo lineare la forza di richiamo e
la deformazione lineare, prende il nome di Legge di Hooke.
L’equazione del moto in presenza di una forza elastica è
mx kx
(1)
che ha come soluzione x(t)=x0cos(t) se le condizioni iniziali sono x(0)=x0 e x (0)=0, avendo definito
=k/m. La velocità è v(t)= x (t)= -x0sin(t) e l’accelerazione a(t)= x (t)= -x0cos(t).
3
Un sistema reale che segue in buona approssimazione, per un certo intervallo delle x, la legge della
forza elastica è composto da una massa attaccata a una molla, nel caso in cui la massa della molla sia
trascurabile, e avendo definito la x come l’elongazione rispetto alla lunghezza di riposo l0. In una
situazione reale in cui il sistema è verticale, e quindi la massa è soggetta anche alla forza peso,
l’equazione del moto diventa
mx kx mg
che equivale a traslare il riferimento in cui si scrive l’equazione (1) di una quantità mg/k.
Una molla reale non ha in generale una massa trascurabile, e per descrivere il moto si dovrebbe tener
conto del contributo di ogni elemento infinitesimo di molla, che è soggetta a una forza elastica che
dipende dalla posizione in cui si trova rispetto alla molla: un elemento nella posizione x di una molla
con lunghezza a riposo l0, è soggetto a un richiamo elastico pari a –k*x/l0*l, con l l’elongazione
misurata all’estremo della molla. La trattazione dettagliata porta a concludere che il sistema si può
schematizzare come una molla ideale a cui è attaccata una “massa equivalente”, pari a M eq=M+m/3,
dove M è la massa effettivamente attaccata, e m la massa della molla. Quindi la relazione tra periodo e
costante elastica deve essere corretta: T = 2 ((M+m/3)/k), e la stessa Meq deve essere usata per il calcolo
dell’energia cinetica. Si arriva allo stesso risultato nell’ipotesi che la velocità di ogni elemento di molla
sia proporzionale alla posizione in cui si trova rispetto alla lunghezza a riposo della molla: v(x) = x/l 0 V,
dove V è la velocità dell’oggetto attaccato all’estremo libero della molla. L’energia cinetica K del sistema
è quindi la somma dell’energia cinetica dell’oggetto e delle energie cinetiche di tutti gli elementi:
2
x
1
1m
dK dm v 2
dx V
2
2 l0
l0
2
l0
1
1
mV
1
K MV 2
x 2 dx M m 3 V 2
3
0
2
2 l0
2
La forza elastica è una forza conservativa, quindi si può definire l’energia potenziale U=-L0x=½kx2,
avendo preso come riferimento per cui U=0 la posizione di equilibrio x=0, cioè la lunghezza a riposo (o
di equilibrio se il sistema è soggetto anche alla forza peso). L’energia totale elastica, E=U+K si conserva.
4
Laboratorio
MATERIALE
Sono messe a disposizione molle di diversa massa e costante elastica, un portapeso e pesi di diversa
massa.
La molla può essere appesa a un sensore di forza PASCO CI-6537, mentre la posizione della base del
portapesi può essere rilevata da un sonar PASCO CI-6529. Entrambi gli strumenti sono connessi al
computer tramite un’interfaccia di acquisizione PASCO Science Workshop 500 e l’acquisizione e la
registrazione dei dati è effettuata con il software DataStudio. Per la misura delle masse è disponibile
una bilancia digitale.
x
x0
x
x0
5
TARATURA
Taratura del sonar: si posiziona il sensore a una distanza nota dal muro (ad esempio 1 m), la si immette
nella casella Distanza di calibrazione, nella finestra Proprietà del sensore Sensore
di moto rettilineo, quindi si preme il tasto Calibra.
Taratura del sensore di forza: si lascia libero il gancio del sensore, si preme il bottone di azzeramento
sullo strumento, quindi si immette il valore 0 nella casella Punto di minimo - Valore nella finestra
Proprietà del sensore Calibrazione, quindi si preme il tasto Calibra. Analogamente, si
appende una massa nota al gancio, e si procede allo stesso modo nella casella Punto di massimo,
inserendo il valore in Newton del peso noto, preceduto dal segno meno (per il sensore, una trazione è
una forza negativa e una spinta una forza positiva). Nell’esempio in figura, si è appesa una massa totale
di 339,66 g, cioè 3,331 N usando il valore per l’accelerazione di gravità 9,806 m/s 2, valido alla latitudine
di 45° (Parma è 44° 48' 0'' N).
6
POSIZIONAMENTO
Il sonar deve essere posto a distanza sufficiente dal tavolo, per non essere disturbato dalla sua presenza
nella misura. Si pone quindi il sensore di forza a distanza sufficiente, quindi con un filo a piombo si
posiziona il sonar.
MISURA DELLE MASSE
Le masse degli oggetti usati nell’esperimento vengono misurate con la bilancia digitale, che ha
un’incertezza di 0,01 g, e sono riassunte in tabella
OGGETTO
MOLLA
PESO
PESI USATI PER LA CALIBRAZIONE
ROSSA
BIANCA
VIOLA
25 CHIARO
25 SCURO
50 CHIARO
50 SCURO
50 A
50 B
50 C
PORTAPESO
MASSA (g)
12,03
12,03
23,88
25,09
24,98
50,00
50,07
50,11
49,96
49,89
39,56
VERIFICA DELLA LINEARITÀ FORZA-ALLUNGAMENTO
Si misurano le posizioni in cui il sistema massa-molla è all’equilibrio, per diversi valori della massa
appesa e per due diverse molle. In questo modo si può confrontare la dipendenza dell’elongazione della
molla dalla forza applicata P, che è uguale in modulo alla forza elastica F esercitata dalla molla, cioè si
può osservare x(F).
Un primo problema è la difficoltà nel raggiungere l’equilibrio. Dopo aver fermato il più possibile il
sistema, è conveniente acquisire la posizione per qualche secondo, e usare come valore della posizione
di equilibrio la media dei valori ottenuti. I risultati riportati nella tabella seguente sono ricavati da
misure di 2 s con un campionamento di 40 Hz.
MOLLA VIOLA (□)
oggetto
massa (g)
mg (N)
x (m)
MOLLA BIANCA (o)
x (m)
x (m)
x (m)
portapeso
39.56 0.0000
0.747
0
0.781
0
25 C
24.09 0.2362
0.721
0.026
0.769
0.012
50 S
50.00 0.4903
0.695
0.052
0.757
0.024
50 S + 25 C
74.09 0.7265
0.668
0.079
0.746
0.035
50 S + 50 C
100.07 0.9813
0.642
0.105
0.734
0.047
50 S + 50 C + 25 C
124.16 1.2175
0.615
0.132
0.723
0.058
50 S + 50 C + 25 C + 25 S
149.14 1.4625
0.589
0.158
0.712
0.069
7
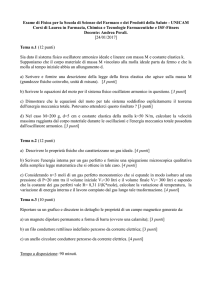
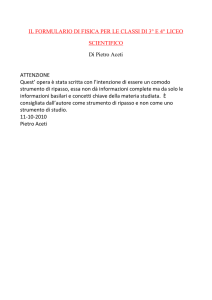
Riportando su un grafico i dati di peso ed elongazione per entrambe le molle, si può immediatamente
verificare la dipendenza lineare. Da un fit lineare si calcola la costante elastica di entrambe le molle, pari
alla pendenza della retta.
1.6
y = 21.241x - 0.0128
R2 = 0.9998
1.4
peso (N)
1.2
y = 9.2566x + 0.0007
R2 = 0.9999
1.0
0.8
0.6
0.4
0.2
0.0
0
0.05
0.1
0.15
0.2
elongazione (m)
MOLLA VIOLA: k = 9,26 0.05 N/m
MOLLA BIANCA: k = 21.24 0.14 N/m
Nota bene
Il sensore di forza funziona con un cristallo piezoelettrico. Oltre alla taratura, bisogna azzerare prima di
ogni misura, per evitare effetti di deriva che possono introdurre errori sistematici. Si può verificare
l’entità di questo problema, e quindi la necessità dell’azzeramento, confrontando i valori dei pesi
calcolati come (mmolla+mportapesi+mpeso)g con quelli della forza misurata durante le misure precedenti,
avvenute azzerando solo una volta per ogni molla. Si vede che i valori misurati si allontanano
sensibilmente da quelli calcolati dopo un certo numero di misure.
Con l’azzeramento prima di ogni misura, i valori invece corrispondono entro le incertezze di misura.
viola (23.88 g)
oggetto
massa (g) peso calc (N)
bianca (12.03 g)
F reazione
peso calc (N)
F reazione
portapeso
39.56
0.62
0.57
0.51
0.49
25 C
24.09
0.86
0.80
0.74
0.73
50 S
50.00
1.11
1.02
1.00
1.00
50 S + 25 C
74.09
1.35
1.25
1.23
1.21
50 S + 50 C
100.07
1.60
1.47
1.49
1.45
50 S + 50 C + 25 C
124.16
1.84
1.69
1.72
1.68
50 S + 50 C + 25 C + 25 S
149.14
2.08
1.93
1.97
1.91
Questo non influenza la misura della costante elastica, ma risulta importante nella misura dinamica,
perché dalla misura della forza della reazione vincolare si può ricavare l’accelerazione del sistema.
8
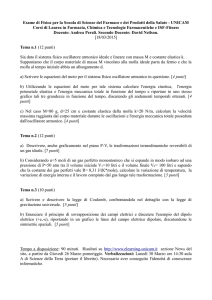
Figura 1. Dati di forza e posizione all’equilibrio relativi a diverse masse appese alla molla bianca. Ogni
acquisizione è di 2 secondi con un campionamento di 40 Hz.
9
Figura 2. Dati di forza e posizione all’equilibrio relativi a diverse masse appese alla molla viola. Ogni
acquisizione è di 2 secondi con un campionamento di 40 Hz.
10
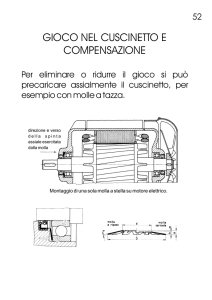
Figura 3. Dati di posizione, velocità, accelerazione e forza acquisiti durante l’oscillazione del sistema massamolla, costituito dalla molla bianca, il portapeso e una massa da 50 g.
11
Figura 4. Dati di posizione, velocità, accelerazione e forza acquisiti durante l’oscillazione del sistema massamolla, costituito dalla molla viola, il portapeso e una massa da 50 g.
12
MOTO DI UNA MASSA SOGGETTA A UNA FORZA ELASTICA
Per ogni molla, si è appeso il portapeso con il peso 50 S (M = 89,56 g in totale), e si è imposto un
allungamento iniziale di pochi centimetri, per poi rilasciare il peso e acquisire posizione e forza. La
velocità viene calcolata dal software di acquisizione.
La rappresentazione grafica (vd. Figura 3 e Figura 4) permette di verificare facilmente gli aspetti
qualitativi della teoria: la posizione ha un andamento che ben approssima una funzione sinusoidale, la
velocità risulta sfasata di /2, l’accelerazione opposta in fase.
La velocità è calcolata dai dati di posizione attraverso un rapporto incrementale discreto (come descritto
in dettaglio più avanti), e analogamente per l’accelerazione, calcolata dalla velocità. Il doppio passaggio
di un calcolo alle differenze finite dà un risultato troppo rumoroso, quindi è meglio usare i dati misurati
della reazione vincolare R. Ricavare l’accelerazione in questo modo permette inoltre di applicare, e
quindi ripassare, il III principio della dinamica. Infatti, il sistema oscillante è soggetto a una risultante
delle forze esterne F ( M m)aG ( M m)g R , quindi R ( M m) aG g . Quindi la reazione
uguaglia, a meno di una costante data dal peso del sistema, la forza agente sul sistema, e per il terzo
principio tale forza è pari in modulo a quella che il sistema compie sul vincolo, cioè quella misurata dal
sensore di forza Fmis.
R
( M m) g aG
k x
Mg
Se la massa della molla fosse trascurabile, si avrebbe Fmis = Mg - Ma, con a accelerazione del blocco
appeso, cioè quella di interesse. Se la massa m non è trascurabile, il sistema è equivalente a una massa
(M+m/3) collegata a una molla ideale (vd capitolo precedente), quindi Fmis = (M+m)g - (M+m/3)a.
13
Una verifica quantitativa delle relazioni tra posizione, velocità e accelerazione, richiede la
determinazione di ampiezza e pulsazione delle tre grandezze oscillanti. Un fit sinusoidale è possibile in
modo semplice e immediato direttamente da DataStudio, e permette di verificare l’uguaglianza dei
periodi delle tre grandezze, e le relazioni a0=2x0sin(t) e =k/M. I risultati sono riportati nelle seguenti
tabelle (x(t)=xm + x0sin(t); F(t)=Fm + F0sin(t)).
MOLLA VIOLA: m=23,88 g – M=89,56 g – k=9,25 N/m
MOLLA BIANCA: m=12,03 g – M=89,56 g – k=21,2 N/m
ω misurato
ω=(k/M)
ω=(k/(M+m/3))
F0 misurato
F0=x0*Mω^2
F0=x0*(M+m/3)ω^2
Fm misurato
Fm = (M+m)g
viola
9.74 s-1
10.166 s-1
9.743 s-1
0.309 N
0.276 N
0.301 N
1.11 N
1.112 N
bianca
15.02 s-1
15.400 s-1
15.067 s-1
0.297 N
0.288 N
0.301 N
0.97 N
0.996 N
Come si vede, in entrambi i casi è necessario correggere il valore della massa sommando 1/3 della massa
della molla, come discusso nella sezione di teoria, ottenendo un accordo con il valore misurato entro
l’1% per la molla viola e il 3% per la molla bianca.
L’accordo sembra ragionevole, anche se non è possibile una stima dell’incertezza di misura, che non è
solo dovuta alla opportuna propagazione delle incertezze delle misure dirette e della determinazione
dei parametri di fit, ma anche alla deviazione del moto dalla verticale, difficilmente riducibile e non
misurabile con il sistema a disposizione.
14
FIT SINUSOIDALE
Il fit eseguito da DataStudio sembra la scelta migliore per praticità (non richiede l’esportazione dei dati
a un altro programma, né valori iniziali per i parametri) e velocità, ma proprio per queste caratteristiche
non sempre può essere usato. Su certe serie di dati il fit restituisce funzioni che non si sovrappongono ai
dati (Figura 5), e non prevedendo l’intervento dell’utente per definire i valori iniziali, costringe a usare
un programma esterno. Questo si è reso necessario nel nostro caso per il fit della posizione per la molla
viola.
Figura 5. Dati di posizione e interpolazione sinusoidale effettuata con DataStudio, riferiti alla molla viola.
Di seguito sono riportati i risultati dei fit delle posizioni e le velocità per le due molle ottenuti con
Matlab, che permette la scelta dell’intervallo su cui eseguire il fit, e l’inserimento dei parametri iniziali.
Fit con Matlab:
f(x) = A*sin(*x +)+c
viola posizione
viola velocità
A (m)
0.03249 (0.03245, 0.03253)
0.3096 (0.3088, 0.3103)
(s )
9.743 (9.741, 9.744)
9.743 (9.74, 9.746)
1.776 (1.773, 1.779)
-2.936 (-2.941, -2.931)
c (m)
0.6903 (0.6903, 0.6903)
-2.789e-005 (-0.0005518, 0.000496)
SSE
3.183e-006
0.0008989
0.9999
0.9998
RMSE
0.0001686
0.002833
A (m)
(s-1)
c (m)
SSE
R2
RMSE
bianca posizione
0.01425 (0.01418, 0.01432)
15.02 (15.02, 15.03)
-1.765 (-1.775, -1.755)
0.7552 (0.7551, 0.7552)
8.415e-006
0.9993
0.0002741
bianca velocità
0.2028 (0.2017, 0.2038)
15.02 (15.01, 15.02)
-0.1821 (-0.1928, -0.1714)
0.0004101 (-0.0003218, 0.001142)
0.001767
0.9993
0.003972
-1
R
2
tra parentesi gli intervalli di confidenza al 95%
15
molla viola - posizione
0.72
0.7
0.68
0.66
0.5
1
-4
10
1.5
2
2.5
2
2.5
Residuals
x 10
5
0
-5
0.5
1
1.5
molla viola - velocità
0.2
0
-0.2
0.5
1
1.5
2
2.5
2
2.5
Residuals
0.01
0.005
0
-0.005
-0.01
0.5
1
1.5
16
molla bianca - posizione
0.77
0.76
0.75
0.74
0.5
1
-3
1
1.5
2
2.5
2
2.5
Residuals
x 10
0
-1
-2
-3
0.5
1
1.5
molla bianca - velocità
0.2
0.1
0
-0.1
-0.2
0.5
1
1.5
2
2.5
2
2.5
Residuals
0.04
0.03
0.02
0.01
0
-0.01
0.5
1
1.5
17
ENERGIA TOTALE ELASTICA
Con i valori misurati di costante elastica k, pulsazione e massa equivalente Meq=M+m/3, si possono
calcolare le energie potenziale U = ½ k x2 e cinetica Ecin = ½ Meq v2 sui dati di posizione e velocità
acquisiti.
Calcolo di x: per calcolare x = x – xeq, dove xeq è la posizione della massa all’equilibrio, non è
conveniente usare il valore di xeq misurato, in quanto l’incertezza sulla posizione è di 1 mm, e
l’ampiezza delle oscillazioni circa 2-3 cm, quindi si avrebbe un’incertezza di circa il 5%, che diventa 10%
sul quadrato che serve per calcolare l’energia potenziale. Dato che i dati si adattano bene a una curva
sinusoidale, si può prendere come valore di xeq la media dei dati di posizione, oppure la costante
additiva risultante dal fit con la funzione x(t)=xm + x0sin(t). I risultati per entrambe le molle sono
mostrati in Figura 6 e Figura 7. Si vede che il valore dato dal fit riduce notevolmente la differenza di
ampiezza tra due periodi successivi.
Massa equivalente: abbiamo già dimostrato nella sezione di teoria e verificato nel paragrafo precedente
che il sistema massa-molla si comporta come una massa Meq=(M+m/3) appesa a una molla ideale priva
di massa. L’energia cinetica è stata quindi calcolata come Ecin = ½ (M+m/3) v2
Calcolo dell’energia totale: l’energia totale non può essere calcolata direttamente come U+Ecin, perché i
dati di posizione e velocità non sono riferiti agli stessi istanti. In Figura 6 e Figura 7 i valori di U e Ecin
calcolati sui dati sono sovrapposti da curve ottenute con un’interpolazione spline, in modo da avere i
valori per istanti intermedi, uguali per entrambe le energie. Su queste interpolazioni è calcolata Etot.
-3
-3
bianca
3
energia (J)
viola
x 10
2.5
U
Ecin
2
Etot
1.5
1
U
Ecin
6
energia (J)
x 10
Etot
4
2
0.5
0
0
0.2
0.4
tempo (s)
0.6
0.8
0
0
0.2
0.4
0.6
0.8
tempo (s)
1
1.2
Figura 6. Energia potenziale, cinetica e totale per entrambe le molle, calcolate dai valori dei dati di posizione e
velocità. La posizione di equilibrio x eq è stata calcolata dalla media dei dati di posizione.
18
-3
-3
bianca
3
energia (J)
viola
x 10
2.5
U
Ecin
2
Etot
1.5
1
U
Ecin
6
energia (J)
x 10
Etot
4
2
0.5
0
0
0.2
0.4
tempo (s)
0.6
0
0.8
0
0.2
0.4
0.6
0.8
tempo (s)
1
1.2
Figura 7. Energia potenziale, cinetica e totale per entrambe le molle, calcolate dai valori dei dati di posizione e
velocità. La posizione di equilibrio x eq è stata ricavata dal fit, descritto nel paragrafo precedente.
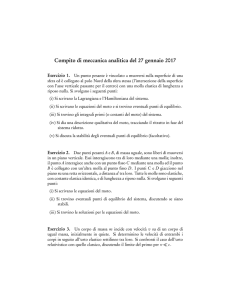
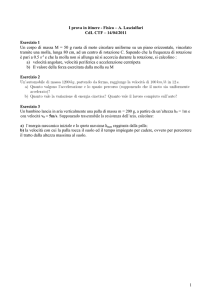
In Figura 8 sono mostrate le energie potenziale, cinetica e totale calcolate dal fit dei dati di posizione e
velocità, usando le funzioni modello xm+x0sin(t+) e vm+v0sin(t+): U=1/2*k* [x0sin(t+)]2,
Ecin=1/2*Meq* [v0sin(t+)]2 e Etot = U + Ecin.
Questa rappresentazione non permette di osservare le anarmonicità delle curve sperimentali, ma
permette di evidenziare come l’energia cinetica sia sottostimata rispetto a quella potenziale.
-3
-3
bianca
3
energia (J)
viola
x 10
2.5
U
Ecin
2
Etot
1.5
1
U
Ecin
6
energia (J)
x 10
Etot
4
2
0.5
0
0
0.2
0.4
tempo (s)
0.6
0.8
0
0
0.2
0.4
0.6
0.8
tempo (s)
1
1.2
Figura 8. Energia potenziale, cinetica e totale per entrambe le molle, calcolate dai fit dei dati di posizione e
velocità.
Ampiezza delle oscillazioni. Le oscillazioni dell’energia cinetica sono confrontabili in valore assoluto
per entrambe le molle (circa 1*10-4 J), ma meno evidenti per la molla viola, per la quale l’ampiezza del
19
moto armonico è maggiore. Il problema pratico di questo esperimento è porre l’oggetto appeso in
oscillazione lungo la verticale, cosa sempre più difficile all’aumentare dell’allungamento iniziale, che
quindi non permetterebbe di avere una maggiore costanza dell’energia totale.
molla bianca
molla viola
ampiezza oscillazioni di posizione
14,2 mm
32,5 mm
energia totale media Etot
2,03 mJ
4,776 mJ
ampiezza oscillazioni Etot (assoluta)
0,115 mJ
0,107 mJ
ampiezza oscillazioni Etot (%)
5,6%
2,2%
La non conservazione dell’energia totale non può essere attribuita all’attrito dell’aria, in quanto si sono
considerate solo i primi periodi, dove non c’è un’apprezzabile diminuzione dell’ampiezza di
oscillazione; inoltre lo smorzamento indurrebbe un andamento decrescente dell’energia totale, e non
oscillante. L’andamento oscillante deve essere attribuito a errori nella misura delle costanti k e Meq, e/o
dei valori di posizione e velocità nei diversi istanti.
Velocità. La velocità è calcolata come rapporto incrementale tra due istanti t1 e t4, e attribuita all’istante
t=(t2 + t3)/2. Questo è equivalente a eseguire uno smooth dei dati mediando tra il valore centrale e i primi
vicini, e calcolare il rapporto incrementale tra due dati successivi della serie così ottenuta.
La velocità così calcolata risulta sempre sottostimata:
v(t)= (sin(t+3t/2)- sin(t-3t/2))/(3t) = 2sin(3t/2)/(3t) * cos(t)
cioè la quantità v2, da cui si ricava l’energia cinetica, è [sin(3t/2)/(3t/2)]2 * cos2(t) < 2cos2(t), dove
2cos2(t) è la quantità esatta per v2.
E’ possibile stimare l’errore commesso dal calcolo discreto, supponendo i dati di posizione
perfettamente sinusoidali, e usando i dati di campionamento e del periodo dell’esperimento:
v% = (vdiscreta – vanalitica)/vanalitica = ([sin(3t/2)/(3t/2)]2 - 2)/2 *100
Campionamento: 40 Hz separazione tra istanti successivi t=0,025 s
molla viola: =9,74 s-1 v% = 4,4%
molla viola: =15,02 s-1 v% = 10,4%
Queste percentuali sembrano rendere conto della differenza tra il massimo dell’energia potenziale e il
massimo dell’energia cinetica (cioè il doppio dell’ampiezza di oscillazione dell’energia totale), quindi il
calcolo discreto della velocità può essere considerato la causa dominante dell’apparente non
conservazione dell’energia totale.
20
Misura di k e delle masse. L’incertezza nella misura della costante elastica e delle masse potrebbe
contribuire alla non conservazione dell’energia totale calcolata, dato che queste quantità compaiono a
fattore rispettivamente dell’energia potenziale e dell’energia cinetica, influenzandone l’ampiezza.
Tuttavia, le incertezze sono dell’ordine dello 0,5% per le k e 0.01% per le masse, quindi trascurabili
rispetto all’errore sul calcolo delle derivate. Infatti, se si suppone i dati di posizione sinusoidali (cosa
giustificata dal risultato dei fit) e si calcola l’energia cinetica con le velocità calcolate come
v(t)=*x0cos(t), con e x0 ottenuti dal fit dei dati di posizione, l’energia totale risulta costante,
confermando che i valori ottenuti per k e le masse forniscono i coefficienti corretti per i due tipi di
energia (Figura 9).
-3
-3
bianca
x 10
3
U
Ecin
2.5
2
1.5
1
U
Ecin
6
energia (J)
energia (J)
viola
x 10
4
2
0.5
0
0
0.2
0.4
tempo (s)
0.6
0.8
0
0
0.2
0.4
0.6
0.8
tempo (s)
1
1.2
Figura 9. Energia potenziale, cinetica e totale (.) per entrambe le molle, calcolate dai fit dei dati di posizione.
21
Test d’ingresso
1. Nel SI, la forza si misura in:
a. newton, pari a g m s-2
b. newton, pari a kg m s-2
c. joule, pari a kg m s-2
d. joule, pari a N m
soluzione: b. verifiche: unità di misura
2. Dato un oggetto di massa m=56,07 g, calcola il suo peso.
soluzione: 0,55 N. verifiche: massa e peso, conversione unità di massa
3. Un oggetto di massa m=2 kg, inizialmente fermo, viene trascinato lungo un piano orizzontale
per 13 m da una forza costante F = 5 N diretta lungo una direzione che forma un angolo =30°
con l’orizzontale, verso il basso. Calcola a) il lavoro compiuto dalla forza per trascinare l’oggetto;
b) l’accelerazione dell’oggetto; c) la velocità e l’energia cinetica dell’oggetto dopo aver percorso
13 m. Trascurare l’attrito.
soluzione: a) 56,29 J; b) 2,17 m s-2; c) v=7,5 m/s; K=56,29 J
verifiche: a) lavoro, coseno di un angolo; b) accelerazione, II principio della dinamica; c) velocità, energia cinetica
4. Osserva il grafico in figura, che rappresenta sulle ascisse la temperatura T e in ordinata il
numero di tacche non coperte dalla colonnina di mercurio, N. La legge che lega le due quantità
è:
a. di proporzionalità inversa
b. quadratica
N
c. di proporzionalità diretta
d. lineare
T
soluzione: d. verifiche: concetto di proporzionalità diretta/ linearità e rappresentazione grafica
22
5. Due blocchi, di massa m1=4 kg e m2=2 kg, sono a contatto e appoggiati su un piano orizzontale
con attrito trascurabile. Al blocco 1 si applica una forza orizzontale F=6 N. Determinare la forza
di contatto e l’accelerazione del sistema.
soluzione: a=F/(m1+m2); T=m2/(m1+m2)*F; verifiche: II e III principio
6. In un moto circolare uniforme, se il modulo della velocità tangenziale e il raggio raddoppiano,
l’accelerazione:
a. raddoppia
b. triplica
c. quadruplica
d. nessuna delle risposte precedenti è esatta
soluzione: a; verifiche: moto circolare uniforme
23
Lezione 1
Legge di Hooke
L’esperienza di laboratorio ha permesso di studiare la risposta di una molla a una deformazione lineare.
La forza esercitata dalla molla risulta proporzionale all’elongazione e diretta in verso opposto a essa. La
legge che lega la forza all’elongazione si chiama legge di Hooke:
F = - kl
Un forza di questo tipo si chiama forza elastica, e la costante di proporzionalità si chiama costante elastica.
L’elongazione l è calcolata come l – l,0, cioè come differenza tra la lunghezza l e una lunghezza l0 “a
riposo”, che è la lunghezza naturale della molla quando non è soggetta a nessuna forza.
Lavoro della forza elastica
Il lavoro compiuto dalla forza elastica nello spostare una massa appesa alla molla dalla posizione
coincidente con la lunghezza a riposo alla posizione x, cioè di un tratto x=x-l0, non si può calcolare in
modo semplice, perché la forza non è costante durante lo spostamento. Sappiamo però che in questi
casi, il lavoro è pari all’area sottesa al grafico F(x). Prendiamo come origine della posizione della massa
la lunghezza a riposo l0, in modo che x sia l’elongazione. Dalla figura si vede che il lavoro è l’area del
triangolo di base x e altezza kx: L = - ½ k x2.
Moto armonico
Per studiare il moto di una massa attaccata a una molla, cioè soggetta a una forza elastica, supponiamo
di allungare la molla di una quantità x-l0 rispetto alla lunghezza a riposo l0, e di rilasciare la massa,
cioè la velocità iniziale della massa è nulla. Dalla legge di Hooke, la forza cui è soggetta la molla
dipende dalla sua posizione secondo l’espressione F = -kx (avendo preso come origine la lunghezza a
riposo l0). Dal secondo principio della dinamica, F = ma, quindi l’accelerazione della massa deve essere
proporzionale all’opposto della posizione:
ma = -kx a = -k/m x
24
Il moto che ha queste caratteristiche si chiama moto armonico e la sua legge oraria ha una forma
sinusoidale:
x(t) = cos(t)
Si può capire il perché considerando il moto armonico come proiezione del moto circolare lungo un
diametro.
Infatti, il seno e il coseno sono stati introdotti come proiezione del raggio della circonferenza unitaria
lungo gli assi verticale e orizzontale, rispettivamente. Se il raggio è pari ad A, i due cateti del triangolo
rettangolo in figura sono lunghi Acos e Asin. Se il raggio viene fatto ruotare di moto circolare
uniforme, l’angolo varia nel tempo secondo la legge =t, e il cateto orizzontale varia la sua lunghezza
secondo la legge x=Acos(t).
La velocità tangenziale del moto circolare uniforme ha modulo v=r=A. Dalla figura si vede che la sua
proiezione lungo la x è vx=-Asin(t). Allo stesso modo si può ricavare la forma dell’accelerazione
lungo la x al variare del tempo, sapendo che è la proiezione dell’accelerazione centripeta a=2r=2A:
ax=-2Acos(t), cioè abbiamo trovato un moto per cui l’accelerazione è proporzionale in ogni istante
all’opposto della posizione, che è quello che viene richiesto
imponendo il secondo principio della dinamica al caso della forza
elastica.
Conoscendo quindi solo le leggi della dinamica e la dipendenza
della forza dalla posizione, ricavata sperimentalmente in condizioni
statiche, si può dedurre, per via puramente matematica, il moto di
un corpo soggetto a questo tipo di forza. Questo diventa un’ipotesi
da verificare sperimentalmente.
In figura sono riassunte le forme nel tempo della posizione x(t), la
velocità v(t) e l’accelerazione a(t) del moto armonico, con le relazioni
tra le loro ampiezze e le corrispondenze tra i massimi, i minimi e gli
zeri.
25
Forza di gravità
Nella trattazione precedente è stata trascurata la forza di gravità, cioè si è supposto che un oggetto
appeso a una molla risenta solo della forza elastica dovuta all’azione della molla. Verifichiamo la
legittimità di questa assunzione.
Dall’esperimento già effettuato, si intuisce che la forza di gravità non possa essere considerata
trascurabile in quanto il suo effetto è visibile e confrontabile con quello della molla, infatti appendendo
diversi pesetti la molla veniva allungata finché la forza peso non uguagliava in modulo la forza elastica.
Tuttavia, il suo effetto è solo quello di spostare la posizione di equilibrio, cioè le oscillazioni devono
essere riferite alla lunghezza di equilibrio, per la quale forza elastica e forza peso si uguagliano, invece
che alla lunghezza di riposo naturale della molla. Infatti, riscrivendo il secondo principio della dinamica
tenendo conto anche della gravità,
F = ma = -kx + mg
siccome mg è costante, l’equazione precedente si può riscrivere come:
ma = -k(x-mg/k)
cioè la forza peso ha solo l’effetto di traslare l’origine del riferimento, e la scelta del riferimento non può
cambiare la fisica del fenomeno, ma solo i valori misurati: la x non è l’elongazione rispetto alla
lunghezza a riposo l0, ma rispetto alla lunghezza di equilibrio l0+mg/k.
Energia potenziale
Il lavoro della forza elastica per spostare un oggetto dalla posizione x1 alla posizione x2 si può calcolare
come area del trapezio di basi kx1 e kx2, e altezza x2-x1: L = ½ (kx1 + kx2)*(x2-x1) = ½ (kx22 – kx12). Si
vede che il lavoro dipende solo dalle posizioni di partenza e arrivo, e non dal percorso fatto (compito:
calcolare il lavoro della forza elastica per uno spostamento da x1 a x2, passando per una posizione x3 in direzione
opposta).
Quindi la forza elastica è una forza conservativa, e si può definire un’energia potenziale associata:
U(x) = ½ k x2
che esprime l’energia “accumulata”
nella molla, cioè il lavoro che è in
grado
di
fare.
L’energia
totale
elastica, cioè la somma dell’energia
potenziale
elastica
e
dell’energia
cinetica, si conserva:
E = U + K = ½ k x2 + ½ m v2
26
Test d’uscita
1. La costante elastica k di una molla è:
e. la costante di proporzionalità tra elongazione e forza di richiamo, x = -kF
f.
la costante di proporzionalità tra forza di richiamo ed elongazione, F = -kx
g. la costante di proporzionalità quadratica tra forza di richiamo ed elongazione, F = ½ kx2
h. la costante di proporzionalità inversa tra forza di richiamo ed elongazione, F = -k/x
soluzione: b. verifiche: legge di Hooke
2. Scrivi le dimensioni di k e indica un’unità di misura appropriata (possono essere corrette più
risposte):
a. [k]=[F*L-1], si può misurare in dine/cm
b. [k]=[F*L], si può misurare in N*m
c. [k]=[F*L-1], si può misurare in N/m
d. [k]=[F*L2], si può misurare in N*m2
soluzione: a-c. verifiche: legge di Hooke, analisi dimensionale, unità di misura
3. Il moto di un corpo soggetto a una forza elastica è:
a. circolare
b. parabolico
c. armonico
d. il corpo rimane in equilibrio
e. (c) o (d) a seconda della posizione e velocità iniziali
soluzione: e. verifiche: legge di Hooke, moto di una massa soggetta a una forza elastica
4. In un moto armonico l’accelerazione è:
a. costante
b. direttamente proporzionale allo spostamento rispetto alla posizione di equilibrio e diretta
nello stesso verso dello spostamento
c. direttamente proporzionale allo spostamento rispetto alla posizione di equilibrio e diretta
nel verso opposto dello spostamento
d. inversamente proporzionale allo spostamento e diretta nel verso opposto
soluzione: c. verifiche: moto armonico
27
5. Una molla oscilla con un periodo uguale a T. A un’altra molla con la stessa costante elastica della
prima è appeso un corpo di massa doppia. Qual è il periodo di oscillazione della seconda molla?
a. T
b. 2T
c. ½ T
d.
2T
soluzione: d. verifiche: relazione periodo moto armonico e proprietà del sistema, k e m
6. La pallina di un flipper (m = 150g) viene lanciata usando una molla di massa trascurabile e di
costante elastica k = 800N/m. a) Se si comprime la molla al massimo (3 cm), con che velocità
viene lanciata la pallina? b) Quanto bisogna comprimere la molla per lanciare la pallina con una
velocità dimezzata?
soluzione: a) 2,2 m/s; b) x(v/2)=x(v)/2=1,5 cm. verifiche: energia cinetica ed energia potenziale elastica,
conservazione energia, calcolo letterale per semplificare i calcoli numerici
7. Una massa di 0,5 kg fissata ad una molla oscilla di moto armonico con frequenza uguale a 2 Hz e
ampiezza massima dell’oscillazione uguale a 10 cm. Determina il valore massimo della forza ad
essa applicata e il valore della costante elastica della molla.
soluzione: 7,9 N; 79N/m. verifiche: relazione T(k,m); accelerazione nel moto armonico; II principio dinamica
8. Una molla di costante elastica K=100 N/m oscilla con periodo T di 1 secondo. Determina la
massa del corpo appeso.
soluzione: 2,5 kg. verifiche: relazione T(k,m); equazioni algebriche
Esame di alcuni libri di testo
Sono stati esaminati tre testi rivolti al Liceo Scientifico.
Amaldi, “Corso di Fisica”, Zanichelli
Gli argomenti trattati qui in un’unica unità didattica sono invece trattati in questo libro separatamente,
in diversi capitoli della sezione di meccanica, in un arco che copre cinque capitoli:
4 – il moto armonico dal punto di vista cinematico
Il moto armonico viene introdotto come proiezione del moto circolare; non si fa uso delle
funzioni goniometriche, ma si dà un’idea qualitativa dell’andamento della posizione. Non si
28
ricava la relazione tra velocità e posizione, si ricava invece quella tra accelerazione e posizione
utilizzando gli angoli simili che si formano tracciando i vettori posizione e accelerazione
centripeta.
5 – definizione operativa della forza attraverso l’uso del dinamometro
La molla viene introdotta come elemento del dinamometro, ma non si evidenzia la linearità
tra pesi e allungamento; per la definizione di forza è necessario solo che a pesi uguali
corrispondano allungamenti uguali (in figura tuttavia la linearità è mostrata).
6 – principi della dinamica
Viene trattato qui il moto armonico dal punto di vista dinamico, come moto che verifica il
secondo principio della dinamica nel caso della forza elastica, definita qui per la prima volta.
7 – Lavoro
Il lavoro della forza elastica viene mostrato brevemente come esempio di lavoro di una forza
non costante.
8 – Conservazione dell’energia
Viene definita l’energia potenziale elastica. Non viene evidenziato l’andamento nel tempo
dell’energia cinetica e potenziale.
Nel complesso la forza elastica e la molla vengono trattati in modo frammentario e poco approfondito,
dando quindi poca importanza alla forza elastica e al moto armonico come modello per diversi
fenomeni, e usandola invece come esempio ogni volta che si introduce un concetto nuovo.
Parodi, Ostili, Mochi Onori, “L’evoluzione della fisica”, Paravia
La struttura degli argomenti ricalca l’impostazione “tradizionale”, seguita anche dall’Amaldi:
cinematica, dinamica (definizione operativa con dinamometro, principi dinamica, lavoro, conservazione
energia meccanica), ma la forza elastica e il moto armonico vengono trattati in modo più unitario: nel
capitolo di cinematica si anticipa solo il moto circolare, mentre il moto armonico viene introdotto come
moto dovuto a una forza di tipo elastico nel capitolo dedicato alle “forze e il moto”, unendo quindi gli
aspetti cinematici, statici e dinamici. Anche qui il moto è presentato come proiezione del moto circolare,
ma con qualche dettaglio in più, facendo ricorso alle funzioni goniometriche, e quindi dando
l’espressione esatta della legge oraria e della velocità e dell’accelerazione nel tempo.
Gli aspetti energetici vengono invece trattati molto più avanti, dopo un capitolo sull’equilibrio, uno sui
sistemi di riferimento, un’ampia trattazione della forza gravitazionale (dall’approssimazione uniforme
della forza peso alle leggi di Keplero, addirittura arrivando a cenni di relatività generale), la
29
conservazione della quantità di moto e gli urti, dove si definisce l’energia cinetica, e la conservazione
del momento angolare.
Il lavoro e l’energia potenziale della forza elastica non vengono proposti solo come brevi esempi di
calcolo di queste due grandezze, ma viene dato un certo spazio alla conservazione dell’energia elastica,
mostrando anche l’andamento temporale dell’energia cinetica e potenziale, ed esplicitando il valore
costante dell’energia totale.
Wilson, Buffa, “Fisica, percorsi e metodo”, Principato
E’ il libro, tra quelli esaminati, che tratta la forza elastica in modo meno approfondito. Il moto armonico
non viene trattato né dal punto di vista cinematico né dinamico, la forza elastica viene trattata solo dal
punto di vista statico attraverso la legge di Hooke, e di conseguenza anche dal punto di vista energetico
ci sono pochi accenni.
In definitiva, tutti i libri seguono l’impostazione tradizionale di presentazione della meccanica, divisa in
cinematica e dinamica, e in “concetti”: forza, lavoro, energia potenziale… In questo modo si frammenta
la descrizione di un fenomeno fisico, perché per ogni concetto si trattano diversi esempi. Nella presente
unità didattica si è invece supposto di presentare gradualmente le grandezze fondamentali per la
descrizione della meccanica all’interno della trattazione di un tipo di fenomenologia (ad esempio, la
gravitazione), per poi riprenderli in modo unitario riferiti a nuovi fenomeni (i moti dei sistemi, dei corpi
rigidi, la forza elastica,…)
Inoltre, l’introduzione della forza con il dinamometro separa la “molla da dinamometro” dalla “molla
da legge di Hooke”, come se fossero due oggetti diversi, uno che subisce una deformazione
proporzionale alla forza applicata, e l’altro che risponde con una forza proporzionale alla deformazione
subita.
30
Scheda studente
Test d’ingresso
1. Nel SI,
a.
b.
c.
d.
la forza si misura in:
newton, pari a g m s-2
newton, pari a kg m s-2
joule, pari a kg m s-2
joule, pari a N m
2. Dato un oggetto di massa m=56,07 g, calcola il suo peso.
3. Un oggetto di massa m=2 kg, inizialmente fermo, viene trascinato lungo un piano orizzontale per 13 m
da una forza costante F = 5 N diretta lungo una direzione che forma un angolo =30° con l’orizzontale,
verso il basso. Calcola a) il lavoro compiuto dalla forza per trascinare l’oggetto; b) l’accelerazione
dell’oggetto; c) la velocità e l’energia cinetica dell’oggetto dopo aver percorso 13 m. Trascurare l’attrito.
4. Osserva il grafico in figura, che rappresenta sulle ascisse la temperatura T e in ordinata il numero di
tacche non coperte dalla colonnina di mercurio, N. La legge che lega le due quantità è:
N
a.
b.
c.
d.
di proporzionalità inversa
quadratica
di proporzionalità diretta
lineare
T
5. Due blocchi, di massa m1=4 kg e m2=2 kg, sono a contatto e appoggiati su un piano orizzontale con
attrito trascurabile. Al blocco 1 si applica una forza orizzontale F=6 N. Determinare la forza di contatto e
l’accelerazione del sistema.
6. In un moto circolare uniforme, se il modulo della velocità tangenziale e il raggio raddoppiano,
l’accelerazione:
a. raddoppia
b. triplica
c. quadruplica
d. nessuna delle risposte precedenti è esatta
31
Esperimento 1
TITOLO
Studio della deformazione di una molla
INTRODUZIONE
Con questo esperimento vogliamo studiare la relazione che lega l’allungamento di un oggetto elastico (nel nostro
caso una molla) alla forza che lo causa, e la risposta dell’oggetto a una deformazione.
PREPARAZIONE DELL’ESPERIMENTO
Posizionare il sonar sulla verticale, usando il filo a piombo
FASE 1
Misura
delle masse a disposizione: 2 molle, 1 portapeso, 4 pesetti.
Azzerare la bilancia prima di ogni misura
Appoggiare un peso
Leggere il valore e riportarlo nella seguente tabella
Ripetere per ogni oggetto
OGGETTO
PESO
PORTAPESO
BIANCA
VIOLA
25 CHIARO
25 SCURO
50 CHIARO
50 SCURO
MASSA (g)
12,03
23,88
25,09
24,98
50,00
50,07
39,56
FASE 2
Studio
dell’allungamento di una molla soggetta a una forza.
Appendere la prima molla al gancio, e il portapeso al gancio inferiore della molla
Aspettare che sia raggiunto l’equilibrio e acquisire la posizione per 2 secondi
Aggiungere al portapeso le combinazioni di pesetti indicate in tabella, e per ognuna acquisire la posizione
di equilibrio come indicato nel punto precedente
Compilare le colonne 1, 3 e 5 della tabella seguente; come posizione di equilibrio del portapeso e delle
diverse combinazioni di pesetti scrivere media dei dati acquisiti (visualizzata automaticamente dal
software)
DOMANDE:
o E’ possibile arrivare all’equilibrio perfetto? Come hai deciso che la situazione era di equilibrio?
o Perché abbiamo preso come posizione la media sui dati acquisiti per 2 secondi?
FASE 3
Vogliamo ricavare la legge che lega l’allungamento dell’oggetto molla+massa+portapeso alla forza che lo induce,
cioè il peso dei pesetti aggiunti.
Calcolare l’allungamento come x = x0-x, dove x0 è la posizione dell’oggetto a riposo.
Calcolare i pesi degli oggetti appesi
Compilare le colonne 2, 4 e 6 della tabella con i valori ottenuti
32
oggetto
portapeso
25 C
50 S
50 S + 25
50 S + 50
50 S + 50
50 S + 50
MOLLA VIOLA
MOLLA
COL 1
COL 2
COL 3
COL 4
COL 5
massa (g) mg (N)
x (m) deltaX (m) x (m)
39.56
0.0000
0.747
0
0.781
24.09
0.2362
0.721
0.026
0.769
50.00
0.4903
0.695
0.052
0.757
C
74.09
0.7265
0.668
0.079
0.746
C
100.07
0.9813
0.642
0.105
0.734
C + 25 C
124.16
1.2175
0.615
0.132
0.723
C + 25 C + 25 S 149.14
1.4625
0.589
0.158
0.712
BIANCA
COL 6
deltaX (m)
0
0.012
0.024
0.035
0.047
0.058
0.069
Riporta su un grafico i valori delle forze peso in ascissa e degli allungamenti in ordinata, per entrambe le
molle
DOMANDE:
o C’è correlazione tra allungamento e forza peso? Se sì, che dipendenza c’è?
o Che differenza c’è tra le due molle?
o Considerando che le posizioni misurate sono all’equilibrio, chi esercita la forza che compensa il
peso?
Riporta su un grafico la forza esercitata dalla molla (che abbiamo capito essere in modulo pari al peso) in
funzione dell’allungamento.
DOMANDE:
o La dipendenza è uguale a prima? Scrivi la legge che lega la forza della molla all’allungamento
o I due grafici relativi alle due molle mostrano entrambi una dipendenza lineare, ma con pendenza
diversa. Sapresti dire da quale proprietà della molla dipende la pendenza del grafico (massa,
densità, rigidità, materiale, …)?
Abbiamo trovato che la molla risponde a un allungamento x con una forza F = kx, dove k è la costante di
proporzionalità, detta COSTANTE ELASTICA.
Riporta i dati (x,F) di una molla in CurveExpert
Esegui il fit lineare
Fai lo stesso con la seconda molla
Riporta le costanti elastiche trovate:
MOLLA VIOLA: k =
MOLLA BIANCA: k =
33
Esperimento 2
TITOLO
Studio del moto di una massa soggetta a una forza elastica
PREPARAZIONE DELL’ESPERIMENTO
Posizionare il sonar sulla verticale, usando il filo a piombo
FASE 1
Misura
delle masse a disposizione: 2 molla, 1 portapeso, 1 pesetto da 50g.
Azzerare la bilancia prima di ogni misura
Appoggiare un peso
Leggere il valore e riportarlo nella seguente tabella
Ripetere per ogni oggetto
OGGETTO
MOLLA
VIOLA
BIANCA
50 SCURO
PESO
PORTAPESO
MASSA (g)
12,03
12,03
25,09
39,56
FASE 2
Oscillazione della massa appesa alla molla
Azzerare il sensore di forza prima di appendere qualsiasi cosa
Appendere una molla al gancio del sensore di forza, il portapeso alla molla e il pesetto al portapeso
Tirare la massa il più possibile lungo la verticale
Rilasciare la massa e acquisire per 3 secondi. La posizione e la forza vengono misurati, la velocità e
l’accelerazione calcolati.
Ripetere la procedura per la seconda molla, ricordandosi di azzerare prima di cominciare.
FASE 3
Analisi
dei dati qualitativa.
Verificare che posizione, velocità e accelerazione sono sinusoidali e con uguale periodo
Verificare che la velocità presenta massimi e minimi dove la posizione si annulla e viceversa
Verificare che l’accelerazione presenta minimo dove la posizione ha massimo e viceversa
Analisi dei dati quantitativa
Il sensore di forza misura la forza che il sistema massa-molla esercita su di esso, opposta, per il terzo principio
della dinamica, alla reazione del gancio R=m(g-a). Quindi per avere dei dati di accelerazione meno rumorosi, si
possono dare i dati della forza.
Scrivere l’espressione che rappresenta i dati di posizione, velocità e forza
Riportare in tabella i valori del periodo, dell’ampiezza e del valore medio di posizione, velocità e forza
ampiezza
viola
periodo
media
ampiezza
bianca
periodo
media
posizione
velocità
forza
Applicare un fit sinusoidale alle tre grandezze e riportarli in tabella di fianco a quelli trovati a mano
Verificare che i periodi delle tre grandezze sono uguali
34
Calcolare la pulsazione dal periodo (=2/T) per entrambe le molle; calcolare la costante elastica dalla
relazione k=m2
Confrontare le due k calcolate con quelle ricavate dall’esperimento precedente. Calcolare l’ampiezza
dell’accelerazione dalla relazione F0=m2x0 per entrambe le molle, e confrontarle con quelle ricavate dal
fit dei dati sperimentali. Compilare la tabella con i valori ottenuti.
viola
misurata
bianca
attesa
misurata
attesa
costante elastica k
ampiezza F0
DOMANDA: Perché i valori calcolati sono diversi da quelli misurati? Cosa abbiamo trascurato?
Studio della conservazione dell’energia.
Calcolare in DataStudio L’energia potenziale U = ½ k x2 e l’energia Ecin = ½ m v2. x = x-xm, dove x
sono i dati di posizione e xm è il valore medio restituito dal fit. Calcolare l’energia totale elastica Etot =
U+Ecin.
DOMANDA: Perché non si conserva? Cosa abbiamo trascurato?
FASE 4
Ricalcolare le grandezze calcolate nella fase 3 (k, F0 e Ecin) sostituendo alla massa appesa la quantità
meq=mappesa+mmolla/3. Verificare se l’accordo tra i dati misurati e attesi migliora
Usando il periodo T e l’ampiezza x0 ottenuti con il fit dei dati di posizione, costruire in Excel una colonna di
tempi e una con le posizioni calcolate come x=x 0*cos(2/T*t). Affiancare una colonna di velocità calcolate
come v=-x0*sin(2/T*t). Costruire le due colonne dell’energia potenziale U e dell’energia cinetica K
calcolate su questi valori di posizione e velocità, e una colonna dell’energia totale. Rappresentare su un
grafico U, Ecin ed Etot.
DOMANDA: l’energia ora si conserva? Perché?
35
Test di uscita
1. La costante elastica k di una molla è:
a. la costante di proporzionalità tra elongazione e forza di richiamo, x = -kF
b. la costante di proporzionalità tra forza di richiamo ed elongazione, F = -kx
c. la costante di proporzionalità quadratica tra forza di richiamo ed elongazione, F = ½ kx2
d. la costante di proporzionalità inversa tra forza di richiamo ed elongazione, F = -k/x
2. Scrivi le dimensioni di k e indica un’unità di misura appropriata (possono essere corrette più risposte):
a. [k]=[F*L-1], si può misurare in dine/cm
b. [k]=[F*L], si può misurare in N*m
c. [k]=[F*L-1], si può misurare in N/m
d. [k]=[F*L2], si può misurare in N*m2
3. Il moto
a.
b.
c.
d.
e.
di un corpo soggetto a una forza elastica è:
circolare
parabolico
armonico
il corpo rimane in equilibrio
(c) o (d) a seconda della posizione e velocità iniziali
4. In un moto armonico l’accelerazione è:
a. costante
b. direttamente proporzionale allo spostamento rispetto alla posizione di equilibrio e diretta nello
stesso verso dello spostamento
c. direttamente proporzionale allo spostamento rispetto alla posizione di equilibrio e diretta nel verso
opposto dello spostamento
d. inversamente proporzionale allo spostamento e diretta nel verso opposto
5. Una molla oscilla con un periodo uguale a T. A un’altra molla con la stessa costante elastica della prima è
appeso un corpo di massa doppia. Qual è il periodo di oscillazione della seconda molla?
a. T
b. 2T
c. ½ T
d.
2T
6. La pallina di un flipper (m = 150g) viene lanciata usando una molla di massa trascurabile e di costante
elastica k = 800N/m. a) Se si comprime la molla al massimo (3 cm), con che velocità viene lanciata la
pallina? b) Quanto bisogna comprimere la molla per lanciare la pallina con una velocità dimezzata?
7. Una massa di 0,5 kg fissata ad una molla oscilla di moto armonico con frequenza uguale a 2 Hz e
ampiezza massima dell’oscillazione uguale a 10 cm. Determina il valore massimo della forza ad essa
applicata e il valore della costante elastica della molla.
8. Una molla di costante elastica K=100 N/m oscilla con periodo T di 1 secondo. Determina la massa del
corpo appeso.
36