Appunti del corso di Misure Meccaniche e Termiche Misure di portata e di velocità dei fluidi a cura di R. Montanini
1. GENERALITÀ
Le misure della velocità e della portata di una corrente fluida rivestono grande importanza in
campo scientifico industriale ed economico (si pensi, ad esempio, alla contabilizzazione dei
consumi di acqua e gas delle utenze domestiche).
Il numero e la tipologia degli strumenti di misura disponibili sul mercato è estremamente vario,
tenuto conto delle differenti caratteristiche fisiche, del fluido oggetto delle misura (fluido
comprimibile o incomprimibile), della effettiva distribuzione del campo di velocità (flusso laminare
o turbolento), del tipo di moto (regime subsonico, transonico o supersonico), delle caratteristiche
metrologiche richieste (precisione, linearità, risposta in frequenza), del costo (sia dello strumento
che della catena di misura), della facilità di utilizzo.
Il metodo più immediato per la misura della portata di una corrente fluida è basato sulla sua
stessa definizione e consiste nel misurare il volume o la massa di fluido che fluisce in moto
stazionario in un determinato intervallo di tempo. Tale metodo, lento e laborioso, non ha
applicazioni industriali, ma viene utilizzato per la taratura (primaria) degli altri strumenti di misura
e per la determinazione dei coefficienti di efflusso dei dispositivi a strozzamento. Una seconda
possibilità consiste nel misurare il valore della velocità locale in più punti della corrente fluida per
poi risalire al valore della portata volumetrica, nota la sezione interessata. Infine si possono
utilizzare strumenti che forniscono direttamente una indicazione proporzionale alla portata (in
volume o in massa). Quest’ultima categoria di strumenti è di gran lunga la più utilizzata e svariati
sono i principi di funzionamento su cui sono basati tali misuratori di portata. Seguendo tale
classificazione, verranno descritti in sequela gli strumenti più comunemente utilizzati, distinguendo
tra quelli che misurano propriamente il valore della velocità locale del fluido e quelli che misurano
la portata, volumetrica o massica.
2. MISURA DELLA VELOCITÀ LOCALE DI UN FLUIDO
Come noto, con riferimento ad una corrente fluida che si muove con velocità V all’interno di un
condotto di diametro D, si suole distinguere il moto del fluido in laminare o turbolento. Nel primo
caso il profilo delle velocità nella sezione trasversale del condotto è di tipo parabolico, con valori di
V maggiori in corrispondenza dell’asse della simmetria della tubazione, mentre nel secondo caso il
profilo delle velocità tende a essere più. La transizione del moto da laminare a turbolento, oltre che
dalla velocità del fluido, dipende dalla sue caratteristiche fisiche (densità ρ, viscosità μ e dalla
geometria della tubazione,e viene convenientemente descritta dal valore che assume il numero di
Reynolds Re, definito come:
Re =
moto laminare
ρV D
μ
2000
(Eq. 2.1)
moto turbolento
Elevati valori di Re indicano la presenza di moto turbolento, bassi valori di Re sono invece tipici
di flussi laminari.
Per determinare la portata volumetrica in un condotto mediante misure locali della velocità del
fluido, è necessario eseguire una serie di rilevazioni in corrispondenza di diversi raggi
R
Q = 2π ∫ Vr (r ) r dr
(Eq. 2.2)
0
e quindi calcolare il valore dell’integrale per via grafica. È inoltre consigliabile ripetere il calcolo su
più sezioni per assicurarsi che non ci sia una distribuzione anomala delle velocità che falserebbe la
misura. Sono state anche proposte relazioni empiriche che consentono di calcolare la velocità media
nella sezione mediante un numero limitato di misure in corrispondenza di determinati valori del
raggio.
Nel misurare la velocità di un numero, bisogna inoltre ricordare, che essa è una quantità
vettoriale, caratterizzata da un modulo, una direzione e un verso, e che l’introduzione dello
strumento di misura altera, in maniera più o meno grande, il campo pre-esistente delle velocità
(errore di inserzione).
Gli strumenti più impiegati per la misura puntuale della velocità di un fluido sono il tubo di
Pitot, l’anemometro a filo caldo e il velocimetro laser Doppler. Prima di descrivere più in dettaglio
il funzionamento di questi strumenti, si farà un cenno ad alcuni sistemi utilizzati per visualizzare la
corrente, i quali forniscono prevalentemente informazioni di tipo qualitativo a tutto campo ma
costituiscono un valido aiuto, soprattutto in problemi complessi.
2.1. METODI DI VISUALIZZAZIONE DELLA CORRENTE FLUIDA
Sono basati sull’introduzione di particelle traccianti o bolle di idrogeno (nel caso dei liquidi),
da fumo prodotto dall’evaporazione di olio, presente sulla superficie di un conduttore sottoposto ad
impulsi elettrici (nel caso dei gas) o sulla variazione delle proprietà ottiche del fluido, prodotta da
una variazione della sua densità (metodo a ombra (shadowgraph), metodo shlieren, interferometria).
Se l’oggetto viene fotografato con illuminazione stazionaria, le bolle appaiono come corte scie
la cui lunghezza può essere misurata per ottenere i dati di velocità. Usando una luce stroboscopica
si ottengono serie di punti la cui spaziatura può essere sfruttata per ottenere informazioni simili.
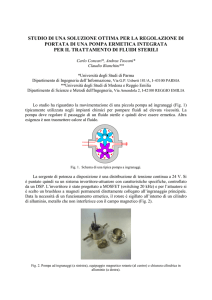
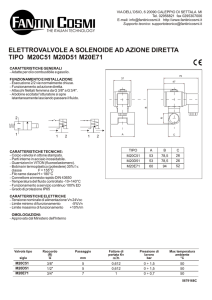
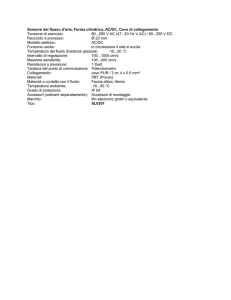
Esiste anche una tecnica di misura (Figg. 1-3) di tipo quantitativo più sofisticata, basata sulla
cross-correlazione di immagini digitali (PIV, Particle Image Velocimetry). Con quest’ultimo
sistema, ad esempio, è possibile mettere in evidenza molto bene la formazione dell’onda d’urto,
fenomeni di distacco della vena fluida, ecc.
Fig. 1 – Principio di funzionamento della PIV
Fig. 2 – Componenti essenziali di un sistema PIV
Fig. 3 – Esempio applicativo
2.2 IL TUBO DI PITOT
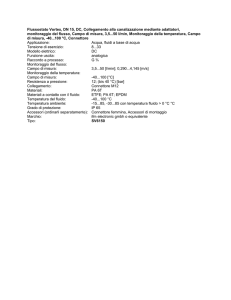
Si tratta di uno strumento, concettualmente molto semplice, il quale, nella sua configurazione
più classica (tubo di Pitot statico), consente la determinazione del modulo della velocità locale di
una corrente fluida di cui sia nota, con una certa precisione, la direzione (flusso
monodimensionale). La misura della velocità viene effettuata indirettamente attraverso la lettura
della differenza tra la pressione totale (di ristagno) e la pressione statica, effettuata collegando i due
rami di un manometro differenziale alle due prese di pressione di cui è munito il tubo di Pitot statico
(Fig. 4). Il tubo di Pitot può essere impiegato sia per fluidi incomprimibili che comprimibili.
Fig. 4 – Tubo statico di Pitot
Per trovare la relazione tra velocità e pressione è sufficiente integrare l’equazione generalizzata
del moto di un fluido, supposto privo di attrito, tra la sezione 0 in cui si ha fluido indisturbato con
pressione p1 = ps e velocità V1 = V e la sezione 1, in cui la corrente ristagna (p2 = pt , V2 = 0),
ottenendo nel caso di fluido incomprimibile:
c dc + v dp + g dz + dR + dL = 0
(Eq. 2.3)
pst + 12 ρ V 2 = ptot
(Eq. 2.4)
2 ( pt − ps )
V=
2 Δp
=
ρs
(Eq. 2.5)
ρs
Nel caso di fluido comprimibile, ipotizzando una evoluzione adiabatica ed isentropica, si ha:
C p T1 + 12 V12 = C p T2
(Eq. 2.6)
che insieme alle
Cp =
p
ρ
p
ρ
k
=
p1
ρ
k
1
kR
k −1
(calore specifico a p=cost)
= RT
=
p2
ρ 2k
(equazione dei gas perfetti)
= cost
(trasformazione adiabatica)
fornisce:
k ps V 2
k pt
+
=
k − 1 ρs
2 k − 1 ρt
2k ⎛ pt ps ⎞ ps
2k p s
⎜⎜ − ⎟⎟
=
V =
k − 1 ⎝ ρt ρ s ⎠ ρ s k − 1 ρ s
2
⎛ pt ρ s
⎞ 2k p s
⎜⎜
− 1⎟⎟ =
⎝ ps ρ t
⎠ k − 1 ρs
2k p s
V2 =
k − 1 ρs
⎡
⎢⎛⎜ pt
⎢⎜⎝ ρ s
⎢⎣
⎞
⎟⎟
⎠
k −1
k
⎤
− 1⎥
⎥
⎥⎦
(Eq. 2.7)
k −1
⎡
⎤
k
⎛
⎞
p
⎢⎜ t ⎟ − 1⎥
⎢⎜⎝ ρ s ⎟⎠
⎥
⎢⎣
⎥⎦
(Eq. 2.8)
Introducendo il numero di Mach M
M =
si ha:
V
c
2k RT
V2
M2 = 2 =
c
k − 1 kRT
⎛ pt ⎞
⎜⎜ ⎟⎟
⎝ ρs ⎠
⇒
c = kRT
con
k −1
k
k −1
⎡
⎤
k
⎞
⎛
p
⎢⎜ t ⎟ − 1⎥
⎢⎜⎝ ρ s ⎟⎠
⎥
⎢⎣
⎦⎥
=
k −1 2
M +1
2
k
⎛ k − 1 2 ⎞ k −1
=⎜
M + 1⎟
ρs ⎝ 2
⎠
pt
(Eq. 2.9)
e sviluppando in serie il binomio
pt = ps + 12 ρ s V 2 [1 + f (M )]
(Eq. 2.10)
Si nota che, se si utilizza la (eq. 2.5) in presenza di un fluido comprimibile si commette un errore in
eccesso, tanto maggiore quanto più grande è M. Si può quindi scrivere
V =ε
2( pt − ps )
ρs
con ε ≤ 1
(Eq. 2.11)
essendo ε un coefficiente minore di uno (=1 nel caso di fluido incomprimibile).
La relazione (2.11) vale per flussi subsonici (M < 1). Quando M > 1 si ha la formazione di
un’onda d’urto a monte del “naso” del tubo di Pitot (per regimi supersonici si impiegano tubi di
forma tale che l’onda d’urto si formi molto distante dalle prese di pressione). In questo caso si ha:
⎛ pt ,m ⎞
⎟⎟
⎜⎜
= f (M , k )
⎝ ps ⎠ M >1
(Eq. 2.12)
e dalla misura di pt e ps si ricava M e quindi V.
La presa di pressione statica di un tubo di Pitot deve essere praticata in una zona in cui il fluido
lambisce tangenzialmente il corpo stesso, in modo da non introdurre alcuna componente dinamica.
La pressione statica è, in generale, la più difficile da misurare (Fig. 5). La deviazione del valore
misurato di pst rispetto a quello reale può essere causata da una serie di fattori: depressione dovuta
alla forma del tubo di Pitot (bordo di entrata) che determina un aumento locale della velocità del
fluido, sovrappressione dovuta alla presenza dello stelo (la presa di pressione statica viene infatti
ricavata in una ben determinata sezione in cui tali due effetti tendono a compensarsi),
disallineamento dell’asse dello strumento rispetto alla direzione della corrente.
Fig. 5 – Errori sulla misura della pressione statica
Anche la misura della pressione di ristagno può essere affetta da alcuni errori dovuti
principalmente a:
1) Disallineamento – esso impedisce di raggiungere le condizioni di ristagno (V = 0) nel
foro di misura. Tubi convenzionali manifestano un errore dell’1% della pressione
dinamica per disallineamenti di ± 5-10°. Tubi progettati con particolare attenzione al fine
di ridurre la sensibilità al disallineamento (ad es., il tubo di Kiel) consentono invece di
limitare tale errore a valori < 1% fino ad angoli di ± 38° (Fig. 6).
2) Campi di velocità bidimensionali/tridimensionali
3) Effetti dovuti alla viscosità del fluido – le equazioni ricavate in precedenza
presuppongono il fluido privo di attrito. Nei fluidi reali, invece, la presenza di forze
viscose determina, soprattutto per bassi di valori di Re, un incremento della pr rispetto a
quella ottenuta per via teorica.
Fig. 6 – Sonda insensibile al disallineamento
Si può tener conto di ciò introducendo un fattore correttivo C, funzione, per un determinato
tubo, del numero di Reynolds
pt ,m = ps + C 12 ρ s V 2
(Eq. 2.13)
Il fattore C può essere ricavato teoricamente o sperimentalmente. Ad esempio, per un cilindro
si trova
C =1+
4
Re
10 < Re < 100
(Eq. 2.14)
, mentre per Re =10 esso diventa del 40% di
e quindi, per Re =100, l’effetto è pari al 4% di ; per Re > 500 tale effetto diventa trascurabile qualunque sia la forma del corpo.
Come è evidente dalle relazioni analitiche riportate, il tubo di Pitot è uno strumento quadratico
per cui esso risulta poco sensibile alle basse velocità. Un modo per incrementare la sensibilità
consiste nel porre il tubo di Pitot in un tubo di Venturi, determinando in tal modo una riduzione
artificiale del valore di pst misurato (la pr non cambia) rispetto a quello relativo al flusso
indisturbato, il che si ottiene appunto accelerando il fluido mediante un condotto convergentedivergente. Tali strumenti devono essere tarati individualmente.
2.3 L’ANEMOMETRO A FILO (FILM) CALDO
L’anemometro a filo caldo (Fig. 7) è costituito da una sonda all’estremità della quale è
applicato un filo di platino o tungsteno, avente un diametro di qualche decina di micrometri (5 – 25
×10-3 mm). Il filo viene immerso nella corrente fluida di cui si vuole misurare la velocità.
Fig. 7 – L’anemometro a filo caldo
Il principio di funzionamento è basato sull’equilibrio termico tra il calore prodotto per effetto
Joule – quando il filo di resistenza R è attraversato da una corrente I, ed il calore asportato per
convezione dal fluido. In condizioni di equilibrio termico si ha:
RI 2 = h S (T f − Tc )
(Eq. 2.15)
in cui h è il coefficiente di convezione, S la superficie di scambio termico, Tf la temperatura del
filo e Tc la temperatura della corrente fluida.
Per un dato fluido e per una determinata sonda, h varia con la velocità del fluido V, secondo la
seguente relazione (con C1 e C2 costanti):
h = C1 + C2 V
per cui si ha:
(
(Eq. 2.16)
)
RI 2 = C1 + C2 V S (T f − Tc )
(Eq. 2.17)
Tale relazione lega la velocità V (grandezza di ingresso) con i parametri I, R e Tf (possibili
grandezze di uscita). Quest’ultimi, però, non sono indipendenti tra loro: infatti, come noto, la
resistenza elettrica varia con la temperatura secondo la:
[
]
R = R0 1 + α (T f − T0 )
(Eq. 2.18)
Ammettendo quindi che la temperatura, la pressione e la densità del fluido rimangano costanti,
la velocità V può essere determinata:
A) mantenendo costante la temperatura del filo Tf e misurando l’intensità di corrente (metodo
a temperatura costante)
B) mantenendo costante l’intensità di corrente I e misurando la temperatura del filo, ovvero la
sua resistenza R (metodo a corrente costante)
Nel primo caso il circuito di misura prevede generalmente l’impiego di un ponte di Wheatstone,
secondo lo schema riportato in Fig. 8
Fig. 8 – Metodo di misura a temperatura costante
Dalle relazioni riportate in precedenza, si deduce, nel caso di Tf = costante:
I2 =
(C + C
1
2
)
V S (T f − Tc )
R
= C3 + C 4 V
(Eq. 2.19)
Riportando in un grafico V sulle ascisse e I2 sulle ordinate, tale relazione è rappresentata da
una retta (vedi Fig. 8)
La sonda deve essere tarata nello stesso fluido e nelle stesse condizioni (pressione, temperatura,
densità) di misura. A tale scopo si pone l’anemometro in una corrente a velocità V1, rigorosamente
nota e costante, dopo aver regolato R1 in modo da aumentare la temperatura del filo – la quale non
deve essere troppo bassa, per avere buona sensibilità, né troppo alta, per evitare una possibile
ossidazione del filo stesso). Quindi si bilancia il ponte agendo sul resistore R3, che deve essere
stabile al variare della temperatura, e si legge la corrente I1 che attraversa il filo mediante
l’amperometro (G). Si ottiene così un primo punto sul grafico V ˗ I2. Si varia quindi la velocità
del fluido fino ad un valore V2. Ciò determina uno sbilanciamento del ponte: infatti, se V2 > V1 la
temperatura del filo (e la sua resistenza) tenderà a diminuire. Agendo su R1 si bilancia il ponte,
riportando così la Tf e quindi la Rf al valore iniziale. Dalla lettura dell’amperometro si determina
quindi un altro punto (V2, I2) della curva di taratura. Tale operazione può essere ripetuta più volte,
costruendo così la curva di taratura dello strumento, la quale vale per quel fluido ed in quelle
determinate condizioni.
Per la misura della velocità incognita si pone lo strumento nel fluido a velocità incognita Vx e si
misura la Ix, dopo aver bilanciato il ponte agendo al solito sulla resistenza R1. Dalla curva di taratura
si determina, infine, la velocità Vx incognita.
Lo schema descritto prevede il bilanciamento manuale del ponte e non si presta quindi alla
misura di velocità rapidamente variabili nel tempo. In questo caso si può impiegare un circuito
controreazionato, in cui un amplificatore di corrente ad elevato guadagno, alimentato dalla tensione
di sbilanciamento del ponte, provvede a riscaldare il filo fino a ripristinare la condizione di
bilanciamento (Fig. 9). La corrente di sbilanciamento Ia, la quale costituisce una misura della
velocità V, viene determinata misurando la caduta di tensione da essa prodotta su una resistenza
calibrata R0. A causa del guadagno non infinito dell’amplificatore, la tensione di sbilanciamento
non può essere annullata completamente, ma può comunque essere resa molto piccola. Con un
sistema di questo tipo è possibile misurare variazioni di velocità ad elevata frequenza che si
sovrappongono ad una velocità media (ad esempio fluttuazioni dovute a moti turbolenti), con una
elevata risposta in frequenza (10 – 50 MHz, - 3 dB).
Fig. 9 – Schema funzionale semplificato di un sistema retroazionato a bilanciamento automatico
Con il metodo a corrente costante si ha:
⎛ R ⎞1
⎟⎟ + T0 = C5 + C6 R
T f = ⎜⎜
⎝ R0 − 1 ⎠ α
e quindi
(
(Eq. 2.20)
)
RI 2 = C1 + C2 V S (C5 + C6 R − Tc )
R=
C7 + C8 V
C9 + C10 V
(Eq. 2.21)
La misura di R si ricava dalla misura della differenza di potenziale Eu ai capi del filo caldo,
come indicato nella Fig. 10.
Fig. 10 – Metodo di misura a corrente costante
Dal punto di vista dinamico, un sistema di questo tipo si comporta come uno strumento del I°
ordine, con costante di tempo τ ≈ 0.001 s (banda passante di circa 160 Hz, - 3 dB). La dinamica
dello strumento può essere notevolmente migliorata mediante l’impiego di circuiti di
compensazione dinamica. Il metodo a corrente costante presenta rispetto a quello a temperatura
costante alcuni svantaggi, come, ad esempio, la possibile fusione del filamento qualora la velocità
del fluido si annulli improvvisamente e la difficoltà di effettuare la compensazione dinamica al
variare della velocità V.
Gli anemometri a filo caldo possono essere impiegati, oltre che per determinare il modulo del
vettore velocità, anche per determinarne la direzione: infatti, la corrente letta sull’amperometro è
massima quando il filo forma un angolo di 90° con il vettore velocità e diminuisce con legge
al diminuire dell’angolo. Un metodo più preciso del precedente consiste nell’utilizzo di una
sonda con due filamenti posti a 90° tra loro: la sonda, immersa nel fluido incognito, viene ruotata
intorno ad un asse fino a quando il ponte fornisce un segnale nullo. La bisettrice dell’angolo
formato dai due filamenti fornisce la direzione del vettore velocità (Fig. 11).
Fig. 11
Il principale pregio degli anemometri a filo caldo risiede nella loro elevata banda passante che
consente di misurare variazioni rapide di velocità. Per contro essi sono strumenti delicati e vengono
prevalentemente impiegati nel caso di correnti gassose prive di impurità.
Gli anemometri a film caldo funzionano secondo lo stesso principio, ma sono meno delicati,
consentendo di ovviare in parte a tale svantaggio. Rimane comunque la possibilità di ossidazione
e/o deposito di impurezze, che alterano la taratura preesistente, costringendo a frequenti operazioni
di pulitura e taratura dello strumento.
2.4 L’ANEMOMETRO LASER DOPPLER
L’anemometria laser Doppler è una tecnica relativamente recente – è stata dimostrata per la
prima volta da Yeh and Cummins nel 1964 – e negli ultimi anni ha subito un processo di rapida
evoluzione che ha portato allo sviluppo dei sofisticati strumenti attuali, in grado di misurare
simultaneamente fino a tre componenti di velocità. Sin da subito, infatti, si sono intuite le enormi
potenzialità della tecnica nello studio della fluidodinamica sperimentale, specialmente in regime
turbolento e in presenza di flussi reattivi e bifase.
L’anemometro o velocimetro laser doppler (LDA o LDV), misura la velocità istantanea di
particelle traccianti che attraversano un volume di misura definito dall’intersezione di due fasci
laser; se le particelle sono in equilibrio con il fluido, lo strumento può essere considerato
effettivamente un anemometro, e costituisce un interessante alternativa al tubo di Pitot e
all’anemometro a filo caldo già esaminati. A fronte di un costo e di una complessità maggiori,
l’anemometro laser presenta alcuni significativi vantaggi rispetto alle tecniche basate su sonde
materiali:
1) la misura avviene senza alcun contatto fisico con il fluido, il quale pertanto non è
influenzato dalla presenza della sonda; può quindi essere utilizzato in flussi bifase o in
presenza di reazioni chimiche (combustione);
2) il volume di misura può essere reso estremamente piccolo (0.2×0.2×0.2 mm3), con una
risoluzione spazio-temporale paragonabile a quella dell’anemometro a filo caldo;
3) non è affetto da ambiguità direzionale e consente di determinare correttamente modulo e
verso della componente di velocità selezionata;
4) misura direttamente la velocità con legge di risposta lineare e non richiede complesse e
delicate procedure di calibrazione.
Per contro, presenta una serie di limitazioni tra cui la necessità di avere un accesso ottico al
fluido e di dover inseminare il fluido con particelle riflettenti. Può essere impiegato sia con i liquidi
che con i gas.
Il principio di funzionamento prevede l’utilizzo di una sorgente ottica a luce laser
monocromatica. Il raggio luminoso viene dapprima sdoppiato in due fasci laser piani polarizzati e
coerenti e quindi focalizzato in un punto (volume di misura) in seno al fluido, dove si forma un
sistema di frange di interferenza. La diffusione della luce ad opera di una particella transitante nel
volume in esame determina uno spostamento in frequenza, dovuto all’effetto doppler, direttamente
proporzionale alla velocità della particella (che si assume uguale a quella del fluido), il quale viene
rilevato mediante un foto-detettore.
Lo schema descritto rappresenta solo una delle possibili configurazioni ed è denominato dualbeam o doppler differenziale (vedi Figg. 12-13).
Fig. 12 – LDA dual-beam con ricezione frontale
Fig. 13 – LDA dual-beam con ricezione in back-scattering
Il segnale prodotto dall’LDA differenziale (Fig. 14) può essere interpretato, come detto, in
termini di frange di interferenza alterne chiaro-scure prodotte dai due fasci nel punto di
intersezione. La distanza tra due frange consecutive vale:
δ=
λ
⎛θ ⎞
2 sin⎜ ⎟
⎝2⎠
(Eq. 2.22)
avendo indicato con λ la lunghezza d’onda della luce utilizzata e con θ l’angolo formato dai due
raggi. La frequenza doppler del segnale ottenuto quando una particella transita per il punto di
intersezione con velocità V (ortogonalmente alla direzione delle frange) è dunque:
⎛θ ⎞
2 V sin ⎜ ⎟
V
⎝2⎠
fD = =
δ
λ
(Eq. 2.23)
Un opportuno sistema di condizionamento del segnale provvede quindi a determinare il valore
della frequenza fD e della componente di velocità V. Il funzionamento dell’anemometro laser
doppler richiede che le particelle traccianti seguano correttamente il fluido sia nel suo moto medio,
sia nelle fluttuazioni turbolente fino alle frequenze più alte associate con le scale spaziali più
piccole. Di conseguenza, un contributo molto importante alla qualità e correttezza delle misure
deriva dalla capacità di selezionare opportunamente le particelle traccianti e di distribuirle nel
flusso, e questo introduce un aspetto empirico fortemente condizionato dall’esperienza
dell’operatore.
Fig. 14 – Formazione di frange di interferenza e segnale Doppler in un velocimetro LDA
La misura di una grandezza scalare, la frequenza Doppler, non consente di risolvere il verso
della velocità e pertanto un sistema LDV come quello descritto finora presenta la stessa ambiguità
direzionale dell’anemometro a filo caldo. Utilizzando schemi più complessi con due sorgenti
luminose di differente lunghezza d’onda, risulta possibile acquisire simultaneamente due diverse
componenti della velocità nel punto di misura ovvero distinguere anche il verso del vettore velocità,
mediante sistemi che impongono uno spostamento noto della frequenza dei due fasci ottici (Fig.
15).
Fig. 15 – Velocimetro LDA a due componenti
2.5 DETERMINAZIONE DELLA DIREZIONE DELLA VELOCITÀ DEL FLUIDO
I sistemi visti in precedenza misurano, in generale, il modulo della velocità del fluido e
richiedono quindi la conoscenza della direzione della corrente, lungo la quale deve essere allineata
la sonda di misura. Nel caso di flussi monodimensionali, tale problema potrebbe essere risolto
ruotando opportunamente la sonda di misura fino ad ottenere un segnale massimo in uscita. Tale
metodo è tuttavia laborioso, poco pratico e di difficile attuazione nel caso di flussi bi- o tridimensionali. Si utilizzano allora a tale scopo delle sonde di forma opportuna (sonde sferiche e
sonde ad artiglio), dotate di più prese (fori) di pressione (3-5), le quali, usualmente, consentono di
determinare anche il modulo del vettore velocità (Fig. 16).
Il funzionamento di tali sonde è basato sulle relazioni esistenti tra le pressioni misurate in
corrispondenza dei fori e gli angoli di incidenza meridiano ed equatoriale che il vettore di velocità
forma rispetto all’asse della sonda. Tali relazioni teoriche devono essere corrette mediante taratura
per tener conto delle reali condizioni di efflusso.
Fig. 16 – Sonde per la determinazione della direzione del flusso
3. MISURA DELLA PORTATA VOLUMETRICA
3.1 DISPOSITIVI A STROZZAMENTO (AREA COSTANTE, Δp VARIABILE)
Nell’attraversamento di una qualunque ostruzione inserita in una condotta, il fluido subisce una
variazione di pressione Δp proporzionale al quadrato della portata volumetrica Q, per cui,
misurando la caduta di pressione si può risalire al valore di Q. Il legame funzionale tra Δp e Q
dipende dalla geometria dello strozzamento e dal moto del fluido, cioè dal numero di Reynolds e,
per misure accurate, deve essere ricavato sperimentalmente. Al fine di evitare la taratura individuale
del tipo di ostruzione, si possono adottare le dimensioni unificate (UNI EN ISO 5167-1/4:2004).
I tipi più diffusi di strozzamenti unificati sono il venturimetro, il boccaglio ed il diaframma
(Fig. 17).
Fig. 17 – Dispositivi unificati a caduta di pressione per misure di portata
Dal punto di vista teorico la relazione tra la portata volumetrica e la differenza di pressione si
ricava, per tutti e tre le tipologie di strumento, applicando l’equazione di Bernoulli tra la sezione 1
in cui il fluido è indisturbato e la sezione 2 di contrazione massima della vena fluida, nell’ipotesi di
moto permanente di un fluido incomprimibile, privo di attrito ed in assenza di scambi di calore e di
lavoro:
p1 + 12 ρ1 V12 = p2 + 12 ρ 2 V22
(Eq. 3.1)
che, insieme alla Qt=A1fV1=A2fV2 fornisce, essendo ρ1=ρ2=ρ
V2 =
Qt =
2 Δp
1
⎛A
1− ⎜ 2 f
⎜A
⎝ 1f
⎞
⎟
⎟
⎠
2
2 Δp
A2 f
⎛A
1− ⎜ 2 f
⎜A
⎝ 1f
ρ
⎞
⎟
⎟
⎠
2
ρ
(Eq. 3.2)
(Eq. 3.3)
La portata teorica si discosta da quella effettiva Qeff a causa delle perdite irreversibili, a causa
della possibile differenza tra i valori di A1f e A2f , riferiti al fluido, rispetto alle sezioni A1 del
condotto e A2 della sezione ristretta. Si tiene conto di ciò introducendo un coefficiente di efflusso C
definito come:
C≡
Qeff
Qt
(Eq. 3.4)
ottenendo quindi, indicando con α il coefficiente di portata:
Qeff =
2 Δp
C A2
⎛A ⎞
1 − ⎜⎜ 2 ⎟⎟
⎝ A1 ⎠
ρ
2
= α A2
2 Δp
(Eq. 3.5)
ρ
Per i tipi unificati, il coefficiente di efflusso viene fornito sotto forma di tabelle e grafici, in
funzione del numero di Reynolds e del rapporto β=D2/D1 tra i diametri dello strozzamento e della
condotta (differenza degli andamenti di C(Re) per diaframma e venturimetro boccaglio). Si noti che
essendo Re funzione della velocità (incognita) è necessario adottare un criterio iterativo, a partire da
un valore di tentativo per C.
In presenza di un fluido comprimibile l’equazione del moto generalizzato del fluido diventa,
ipotizzando una evoluzione adiabatica ed isentropica:
C pT1 + 12 V12 = C pT2 + 12 V22
(Eq. 3.6)
che insieme alle
Cp =
p
ρ
p
ρ
k
=
p1
ρ
k
1
kR
k −1
(calore specifico a p=cost)
= RT
=
p2
ρ 2k
(equazione dei gas perfetti)
= cost
(trasformazione adiabatica)
Wt = ρ1 A1 f V1 = ρ 2 A2 f V2
(moto permanente)
fornisce:
2
k ⎛ p1 p2 ⎞ 1 2 ⎡ ⎛ ρ1 ⎞ ⎛⎜ A2 f
⎜ − ⎟ = V2 ⎢1 − ⎜ ⎟
k − 1 ⎜⎝ ρ1 ρ 2 ⎟⎠ 2 ⎢ ⎜⎝ ρ 2 ⎟⎠ ⎜⎝ A1 f
⎣
⎞
⎟
⎟
⎠
2
⎤
⎥
⎥
⎦
2
2⎤
⎡
2k p1 ⎡ p2 ρ 2 ⎤ ⎢ ⎛ p1 ⎞ k ⎛⎜ A2 f ⎞⎟ ⎥
1−
= 1− ⎜ ⎟
k − 1 ρ1 ⎢⎣
p1 ρ1 ⎥⎦ ⎢ ⎜⎝ p2 ⎟⎠ ⎜⎝ A1 f ⎟⎠ ⎥
⎢⎣
⎥⎦
2
k −1
2⎤
⎡
⎤ ⎡
2k p1 ⎢ ⎛ p2 ⎞ k ⎥ ⎢ ⎛ p1 ⎞ k ⎛⎜ A2 f ⎞⎟ ⎥ 2
1− ⎜ ⎟
V2
= 1− ⎜ ⎟
k − 1 ρ1 ⎢ ⎜⎝ p1 ⎟⎠ ⎥ ⎢ ⎜⎝ p2 ⎟⎠ ⎜⎝ A1 f ⎟⎠ ⎥
⎢⎣
⎥⎦ ⎢⎣
⎥⎦
V2 =
k −1
⎡
⎤
2k p1 ⎢ ⎛ p2 ⎞ k ⎥
1− ⎜ ⎟
k − 1 ρ1 ⎢ ⎜⎝ p1 ⎟⎠ ⎥
⎣⎢
⎦⎥
2
2⎤
⎡
k
⎢1 − ⎛⎜ p2 ⎞⎟ ⎛⎜ A2 f ⎞⎟ ⎥
⎢ ⎜⎝ p1 ⎟⎠ ⎜ A1 f ⎟ ⎥
⎠ ⎥
⎝
⎢⎣
⎦
Wt = ρ 2 A2 f V2 = A2 f
Weff = C A2
2
k −1
⎡
⎤
2k 2 ⎛ p2 ⎞ k p1 ⎢ ⎛ p2 ⎞ k ⎥
1− ⎜ ⎟
ρ1 ⎜ ⎟
k − 1 ⎜⎝ p1 ⎟⎠ ρ1 ⎢ ⎜⎝ p1 ⎟⎠ ⎥
⎣⎢
⎦⎥
2
2
⎡
⎤
k
⎢1 − ⎛⎜ p2 ⎞⎟ ⎛⎜ A2 f ⎞⎟ ⎥
⎢ ⎜⎝ p1 ⎟⎠ ⎜ A1 f ⎟ ⎥
⎠ ⎥
⎝
⎢⎣
⎦
k −1
2
⎡
⎤
k
⎛
⎞
⎛
⎞
2k 2 p2 p1 ⎢
p2 k ⎥
1− ⎜ ⎟
ρ1 ⎜ ⎟
k − 1 ⎜⎝ p1 ⎟⎠ ρ1 ⎢ ⎜⎝ p1 ⎟⎠ ⎥
⎣⎢
⎦⎥
2
⎡
⎤
k
⎢1 − ⎛⎜ p2 ⎞⎟ (m )2 ⎥
⎢ ⎜⎝ p1 ⎟⎠
⎥
⎣⎢
⎦⎥
(Eq. 3.7)
(Eq. 3.8)
D22 A2
con m = 2 =
D1
A1
la quale, introdotto il coefficiente di comprimibilità ε, può essere posta nella forma:
Weff = ε C
A2
⎛A ⎞
1 − ⎜⎜ 2 ⎟⎟
⎝ A1 ⎠
2
2 ρ1 Δp
con ε = f ( k , m,
p2
)
p1
(Eq. 3.9)
Quest’ultima relazione fornisce l’espressione della portata in massa effettiva per un fluido
comprimibile.
I tre dispositivi esaminati, pur funzionando secondo il medesimo principio, presentano alcune
differenze sostanziali.
Il venturimetro consente di “guidare ” meglio il fluido, evitando fenomeni di distacco della
vena fluida, per cui esso presenta, a fronte di un maggior costo e di ingombri più elevati, un elevato
valore del coefficiente di efflusso (0.95< C < 0.98). Ciò si traduce, a parità di Δp, in una minore
perdita di pressione tra le sezioni a monte e a valle del misuratore (≈ 10 – 15% Δp), ed è quindi
indicato per la misura di grandi portate volumetriche, alle quali è associata una dissipazione di
potenza idraulica non trascurabile.
Il diaframma presenta il vantaggio di una maggiore semplicità costruttiva (viene infatti già
fornito dalle prese di pressione, disposte in sezioni diverse a seconda dei modelli, e viene inserito
mediante una flangia, direttamente nella condotta), ma produce una elevata perdita di pressione (≈
40% Δp), è particolarmente sensibile alle variazioni di forma del foro (se, ad esempio, a causa
dell’usura, si produce uno smussamento degli spigoli vivi del foro, varia il coefficiente di efflusso e
quindi, l’indicazione fornita dal dispositivo rispetto alle condizioni di taratura) e può determinare,
se disposto centrato assialmente, un accumulo delle sostanze trascinate con il fluido.
Il boccaglio presenta caratteristiche intermedie tra quelle del venturimetro e quelle del
diaframma.
Oltre ai dispositivi elencati si trovano in commercio altri due tipi di misuratori a strozzamento
(non unificati): il tubo di Dall e gli elementi a flusso laminare. Il primo, simile costruttivamente al
venturimetro, presenta il vantaggio di una bassissima perdita di pressione a parità di Δp, mentre il
secondo funziona secondo un principio diverso, poiché è progettato per lavorare in condizioni di
flusso laminare (Re molto basso): in esso le relazioni tra la portata volumetrica e il Δp è di tipo
lineare anziché quadratica e quindi la sua sensibilità è costante nell’intero campo di misura. Dal
punto di vista costruttivo esso è costituito da un insieme di tubi capillari o da una struttura a nido
d’ape. Esso può essere utilizzato anche qualora si inverta il verso della corrente fluida, è meno
sensibile alla presenza di accidentalità (curve, gomiti, raccordi) a valle e a monte della sezione di
misura, ma non consente alcun recupero della pressione (Δp), la quale viene interamente dissipata
nel passaggio attraverso il misuratore.
Fig. 18 – Tubo di flusso di Dall ed elementi a flusso laminare
3.2 ROTAMETRO (Area variabile, Δp costante)
Il rotametro è costituito da un condotto conico (o comunque di sezione crescente) verticale,
percorso dal fluido dal basso verso l’alto. All’interno viene posto un corpo di forma opportuna detto
“galleggiante” (anche se in realtà esso ha densità ρc superiore a quelle del fluido ρf) il quale assume
una posizione dipendente dalla portata. Infatti, su di esso, in condizioni di equilibrio, agiscono la
forza di gravità (ρc g vc), la spinta idrostatica (ρf g vc), la spinta Δp Ac derivante dalla caduta di
pressione che il flusso incontra nell’attraversare l’ostruzione costituita dal galleggiante stesso, di
sezione frontale Ac e l’attrito tra fluido e pareti del condotto. Trascurando quest’ultimo, in
condizioni di equilibrio si ha:
V2
ρf
Ac Δp = ( ρ c − ρ f ) g vc = Ac
2
ed essendo costante il termine a secondo membro, risulta Δp = cost., per cui, al variare della portata,
varia la sezione di passaggio S = At – Ac compresa tra il tubo e il corpo, esattamente il contrario di
quanto avviene nei dispositivi di strozzamento (in cui S è costante e Δp variabile).
Introducendo al solito un coefficiente di efflusso C, in funzione del numero di Reynolds, per
tener conto delle condizioni reali di efflusso, si ottiene per la portata volumetrica e massica
Qeff = C ( At − Ac ) V = C S
2(ρ c − ρ f ) g vc
ρ f Ac
(Eq. 3.10)
Weff = C ρ f ( At − Ac ) V = C S
essendo S = At − Ac =
π
[( D + kh)
4
2
− d2
2 ρ f (ρ c − ρ f ) g vc
Ac
(Eq. 3.11)
]
Fig. 19 – Rotametro
Scegliendo opportunamente i parametri d, D e k si può rendere con ottima approssimazione
lineare la variazione della sezione di passaggio del fluido e quindi il legame tra la portata e l’altezza
alla quale si dispone il galleggiante dentro il tubo. Si noti che la portata dipende dalla densità e dalla
viscosità (coefficiente di efflusso) del fluido. Sagomando opportunamente la forma del corpo e
facendo ρc=2ρf (come si ottiene minimizzando la funzione Weff(ρf)) è possibile rendere molto
piccola tale dipendenza rendendo lo strumento insensibile alle piccole variazioni di viscosità del
fluido.
Costruttivamente il rotametro può essere realizzato in materiale trasparente, rendendo così
visibile il galleggiante, la cui posizione relativa viene letta sulla scala solidale al tubo, oppure in
metallo, nel qual caso la posizione del galleggiante viene misurata da un opportuno trasduttore di
spostamento (magnetico o induttivo) ed il segnale può anche essere trasmesso a distanza.
Il coefficiente di efflusso C deve essere determinato per taratura. I rotametri possono essere
impiegati sia con i liquidi che con i gas (cambiando il galleggiante). La precisione ottenibile è di
circa 1 - 2% del fondo scala.
3.3 MISURATORE A TURBINA
Sono costituiti da una turbina generalmente preceduta da elementi di forma opportuna atti a
regolarizzare la vena, mossa dalla corrente fluida oggetto della misurazione. Riducendo
opportunamente gli attriti è possibile ottenere una relazione lineare tra la portata volumetrica Q e la
velocità di rotazione della turbina n, per cui dalla misura di quest’ultima si può ottenere la portata.
La misura della velocità di rotazione può essere effettuata mediante un sensore magnetico di
prossimità, il quale produce un impulso di tensione ogni qual volta una delle pale del rotore
determina, passando nella zona di misura, una variazione della riluttanza del circuito magnetico. La
frequenza di ripetizione degli impulsi risulta quindi proporzionale alla portata del fluido.
Fig. 20 – Misuratore di portata a turbina
In virtù della relazione lineare Q-n è anche possibile misurare accuratamente la quantità di
fluido transitata in un determinato intervallo di tempo. Alle basse portate (piccoli Re) gli effetti
viscosi determinano un comportamento non lineare della caratteristica reale Q-n, la quale viene
ottenuta per taratura. Grazie alle loro elevate caratteristiche metrologiche, i misuratori a turbina
vengono spesso utilizzati come campioni secondari di misuratori di portata funzionanti secondo
principi diversi. Il campo di misura è generalmente limitato al tratto lineare della caratteristica Q-n.
Dal punto di vista dinamico, il misuratore a turbina si comporta, per piccole variazioni
nell’intorno del punto di lavoro, come uno strumento del 1° ordine, con costante di tempo compresa
nell’intervallo 2-10 ms. Qualora si desideri in uscita un segnale analogico (in tensione continua), si
può impiegare un convertitore frequenza-tensione.
3.4 MISURATORE ELETTROMAGNETICO
Il principio di funzionamento di questi misuratori di portata è basato sulla legge dell’induzione
magnetica: quando un conduttore di lunghezza l si muove con velocità V ortogonalmente ad un
campo magnetico di induzione B, in esso viene indotta una f.e.m. (e) data da:
e=BlV
Nella realizzazione pratica il conduttore è costituito dal fluido stesso (che pertanto deve avere
una sufficiente conducibilità elettrica), e la sua lunghezza è pari al diametro Dt della tubazione.
Nella sua configurazione più tipica, il misuratore di portata ad induzione è costituito da un tubo
in materiale non ferromagnetico, immerso in un campo magnetico di induzione B, e presenta due
elettrodi all’interno, a contatto con il fluido. Il misuratore viene inserito in serie alla tubazione di cui
si vuole misurare la portata.
Fig. 21 – Misuratore di portata elettromagnetico
Se con R si indica la resistenza elettrica del fluido, la tensione ai morsetti di uscita dello
strumento vale teoricamente B Dt V- R i, ed è quindi proporzionale alla velocità media del fluido
nella sezione di misura. Lo strumento terminale dovrà avere una impedenza di ingresso adeguata, in
dipendenza del valore di R, che può essere stimato teoricamente o misurato sperimentalmente.
Il campo magnetico può essere costante o variabile, dando luogo rispettivamente ad un segnale
in uscita in continua o in alternata. Quest’ultimo consente di eliminare gli effetti indesiderati di
polarizzazione agli elettrodi e consente una semplice amplificazione del segnale, esente da
fenomeni di deriva, ma induce segnali spuri nel circuito di misura. Una alternativa è costituita
dall’utilizzo di un campo continuo modulato in modo da assumere la forma di un’onda quadra, che
consente una compensazione automatica dei disturbi, ottenuta sottraendo al segnale utile il segnale
di zero più volte al secondo.
La conducibilità minima richiesta al fluido è di circa 0.1 μS/cm. Per la misura della portata di
metalli liquidi (ad es. mercurio) il sistema di misura si semplifica notevolmente, a causa della
elevata conducibilità del fluido, che consente di prelevare il segnale utile mediante elettrodi montati
direttamente sulla tubazione metallica (all’esterno) e di utilizzare una campo magnetico costante.
I principali vantaggi dei misuratori di portata ad induzione risiedono nell’assenza di ostruzioni
al fluido, nella capacità di misurare correnti fluidi in entrambi i versi, nella insensibilità alla densità
e viscosità del fluido ed ai disturbi del profilo delle velocità (purché esso presenti simmetrie
assiale), nel vasto campo lineare, nella buona risposta in frequenza (pressoché “istantanea” nei
sistemi DC, limitata dalla frequenza della portante nei sistemi AC e DC modulati).
3.5 MISURATORE A VORTICE
L’introduzione di un corpo di forma opportuna in una corrente fluida dà luogo ad una serie di
vortici a valle del corpo stesso (scia vorticosa di Von Karman) per Re >10.000. La frequenza f di
formazione dei vortici, in regime turbolento, risulta proporzionale alla velocità del fluido, secondo
la relazione
N V
(Eq. 3.12)
f = st
d
essendo d la dimensione caratteristica dell’ostruzione ed Nst (numero di Strouhal) un parametro
dipendente da Re e dalla geometria del corpo. Sagomando opportunamente quest’ultimo, si può
rendere Nst costante per un ampio intervallo di Re, ottenendo così una misura indiretta della portata
attraverso la misura della frequenza f di formazione dei vortici. La f può essere misurata in svariati
modi (ad esempio collegando l’ostruzione ad un elemento ad un elemento elastico). La precisione
ottenibile è dell’1% ed è possibile misurare la portata sia di liquidi che di fluidi comprimibili. Vi è
inoltre il vantaggio di un’uscita intrinsecamente digitale.
Fig. 22 – Misuratore di portata a vortice
3.6 MISURATORE AD ULTRASUONI
Sono basati sull’impiego di trasduttori, generalmente di tipo piezoelettrico, che svolgono la
funzione di trasmettitori/ricevitori di onde ultrasoniche (f = 1-10 MHz), le quali si propagano nel
fluido con velocità c±V, essendo c la velocità di propagazione del suono nel mezzo considerato e V
la velocità del fluido. Tra le numerose configurazioni possibili una delle più utilizzate prevede
l’impiego di una coppia di trasduttori posti all’esterno della tubazione, che trasmettono e ricevono
alternativamente le onde ultrasonore nei due sensi, favorevole e contrario alla corrente fluida.
Indicando con L il tragitto percorso dalle onde, il tempo di transito (o la frequenza di ripetizione
degli impulsi) nei due sensi vale, rispettivamente
c + V cos ϑ
⎧
⎪ f1 =
2V cos ϑ
L
⇒ Δf = f1 − f 2 =
⎨
c − V cos ϑ
L
⎪ f2 =
⎩
L
L
⎧
⎪ t1 = c + V cos ϑ
2V L cos ϑ
⇒ Δt = t1 − t2 =
⎨
L
c2
⎪t2 =
c − V cos ϑ
⎩
Per cui, noti L e ϑ, dalla misura dell’intervallo di frequenza o dell’intervallo di tempo, si può
determinare V. La misura del Δt anziché del Δf presenta l’inconveniente di dipendere dal valore di
c: il valore Δt risulta molto piccolo essendo c elevato. Inoltre, poiché c dipende dalla temperatura,
una variazione di questa introduce un errore nella misura non trascurabile, poiché c compare al
quadrato.
Fig. 23 – Misuratore di portata ad ultrasuoni
La velocità V misurata è in realtà l’integrale delle velocità del fluido lungo il percorso delle
onde, per cui il suo valore dipende dal profilo delle velocità nella sezione di misura, e quindi dal
numero di Reynolds. Un vantaggio non trascurabile del misuratore ad ultrasuoni deriva dall’assenza
di ostruzioni alla corrente fluida. Gli svantaggi derivano dalla già citata sensibilità al profilo di
velocità e dalla necessità che il fluido sia “pulito”.
Un’altra tipologia di strumenti basati sull’impiego di onde ultrasonore è costituita dai
misuratori doppler ad ultrasuoni. Essi, analogamente a quanto visto per l’anemometro laser doppler,
richiedono la presenza di particelle riflettenti in seno al fluido. Il principio di funzionamento è
basato sulla deviazione di un fascio di onde ultrasonore ad opera delle particelle trascinate con il
fluido e sul conseguente spostamento della frequenza per effetto Doppler. Dalla misura della
variazione di frequenza tra l’elemento trasmettitore e quello ricevitore, si ottiene una misura locale
della velocità del fluido:
Δf = f t − f r =
2 f t cos ϑ
V
c
(Eq. 3.13)
Fig. 24 – Misuratore di portata ad ultrasuoni ad effetto Doppler
3.7 FLUSSOMETRI VOLUMETRICI A VANI ROTANTI
I misuratori volumetrici a vani rotanti sono in sostanza dei totalizzatori del volume defluito,
ovvero forniscono una indicazione proporzionale al volume che li attraversa. Il fluido di cui si vuole
misurare la portata riempie delle camere di volume noto, producendo la rotazione di un elemento
rotante. Le tipologie costruttive possibili sono molteplici. Il problema principale consiste nel ridurre
al minimo gli attriti e le inerzie delle parti in movimento nonché le perdite di fluido attraverso le
tenute. A questo scopo sono stati anche proposti sistemi dotati di controllo attivo, in cui l’albero di
rotazione viene accelerato o rallentato in modo tale da rendere sempre nulla la caduta di pressione
(e quindi le perdite di carico) attraverso il flussometro. L’attuatore riceve quindi il segnale da un
trasduttore di pressione differenziale. Con questo sistema viene sottratta un’energia trascurabile al
fluido (Δp ≈ 0).
Fig. 25 – Flussometro a vani rotanti
4. MISURA DELLA PORTATA IN MASSA
In molte applicazioni, la misura della portata in massa è più significativa di quella in volume.
Per esempio, la capacità di un aeroplano o di un missile a combustibile liquido di coprire una
determinato campo di azione è determinata dalla massa di carburante e non dal volume. Anche nelle
industrie in cui si svolgono processi chimici la portata massica è spesso la quantità significativa.
Per la misura della portata in massa di un fluido vengono impiegati comunemente due distinti
approcci:
A) Metodi indiretti basati sulla misura simultanea della massa volumica e della portata
volumetrica (con uno dei metodi visti in precedenza)
B) Metodi diretti mediante strumenti intrinsecamente sensibili alla portata massica
La misura della massa volumica (densità) del fluido può essere ottenuta con un gran numero di
dispositivi basati su differenti principi. La Fig. 26 mostra alcuni metodi di base.
Fig. 26 – Misura della densità di un fluido
In Fig. 26a una porzione del liquido che fluisce viene derivata con un circuito di by-pass e
inviata a un serbatoio di tranquillizzazione. La forza di galleggiamento che agisce sul galleggiante è
direttamente legata alla densità e può essere misurata in vari modi, per esempio con un elemento
elastico strumentato con estensimetri. In Fig. 26b una certa quantità di liquido in movimento
contenuto in un tubo ad U, viene continuamente pesata con un dispositivo a molla e un trasduttore
di spostamento pneumatico. Giunti flessibili isolano il tubo ad U dalle forza esterne. Per misurare il
peso può anche essere utilizzato un sistema di bilanciamento pneumatico retroazionato, che
minimizza la deflessione e riduce gli errori dovuti agli effetti elastici variabili legati agli
accoppiamenti flessibili e alle cerniere. La Fig. 26c mostra un metodo di misura della densità dei
gas che si basa su un piccolo compressore centrifugo (che lavora a velocità costante) il cui compito
è quello di pompare con continuità un campione prelevato dal flusso. La caduta di pressione a
cavallo del compressore è proporzionale alla densità del fluido e può essere misurata con un
opportuno trasduttore di pressione differenziale. I misuratori di portata volumetrici ad ultrasuoni
possono essere corredati da un trasduttore a cristallo per la misura della densità del fluido (Fig.
26d). Tale trasduttore funge da rilevatore di impedenza acustica, la quale dipende dal prodotto della
densità per la velocità dl suono. Poiché tramite il misuratore di portata volumetrico è possibile
ottenere un segnale proporzionale alla velocità del suono, dividendo il segnale di impedenza
acustica per il segnale proporzionale alla velocità del suono, si ottiene un segnale proporzionale alla
densità. L’attenuazione della radiazione proveniente da una sorgente di radioisotopi dipende dalla
densità del mezzo attraverso cui passa la radiazione (Fig. 26e). Per un dato fluido, l’uscita in
corrente del rilevatore di radiazione è all’incirca lineare con la densità (su un intervallo di valori di
densità limitato, ma generalmente adeguato). Per portate di gas è piuttosto comune anche la
misurazione indiretta della densità attraverso il calcolo a partire dai segnali di pressione e di
temperatura (Fig. 26f). Esistono anche sistemi basati su sistemi vibranti: la Fig. 26g mostra uno
strumento costituito da un tubo ad U, nel quale fluisce il fluido di misura. Il primo modo dio vibrare
flessionale di tale sistema è ben approssimato dalle formule classiche riguardanti la trave a mensola.
La rigidezza della trave non dipende dal liquido interno, ma la massa per unità di lunghezza varia in
modo diretto con la densità del liquido, restituendo così una frequenza propria dipendente dalla
densità (secondo una legge non lineare). Il sistema viene mantenuto in oscillazione continua ad una
frequenza molto alla frequenza propria del tubo, mediante un trasduttore di forza magnetico. Un
opportuno sistema di controllo retroazionato provvede ad “inseguire” le variazioni di frequenza
propria al variare della densità del fluido. Circuiti elettronici standard per la misura della frequenza
leggono la densità con elevata risoluzione e accuratezza, mentre possono essere facilmente utilizzati
microprocessori per linearizzare la relazione frequenza-densità e/o garantire la compensazione
termica a partire da segnali provenienti da sensori di temperatura.
Nel calcolare la portata massica a partire dai segnali provenienti dal misuratore di portata di
volume e dal densimetro, il tipo di calcolatore necessario varia a seconda del tipo di misuratore di
flusso. Per i misuratori a battente variabile (ossia quelli che producono una differenza di pressione o
un segnale elettrico proporzionale alla pressione dinamica ρV,2 come, per esempio, un diaframma)
il computer moltiplica il segnale di ρ per ρV2 in modo da ottenere ρ2V2 e poi ne fa la radice quadrata
ricavando ρV che è proporzionale alla portata massica. Per i misuratori di flusso a velocità (come,
per esempio, i tipi a turbina e quelli elettromagnetici) il segnale disponibile è proporzionale a V,
così il calcolatore deve semplicemente moltiplicare quest’ultimo termine per il segnale di ρ.
Sebbene i metodi di misura della portata massica indiretti sopra riportati risultino spesso
soddisfacenti e siano ampiamente utilizzati, esistono anche metodi di misura diretti, i quali possono
presentare, in determinate applicazioni, vantaggi per quanto riguarda l’accuratezza, la semplicità, il
costo, il peso, l’ingombro, ecc. I flussometri intrinsecamente sensibili alla portata in massa più
diffusi sono i seguenti:
1. Misuratori a variazione del momento della quantità di moto (momento angolare)
2. Misuratori ad effetto Coriolis
3. Misuratori termici (gas)
Il misuratore a variazione del momento della quantità di moto, che è impiegato, tra l’altro,
nelle misure di portata del carburante degli aeroplani, è fondato sulla legge del momento angolare
delle turbomacchine:
T = G (Vti ri − Vto ro )
G = portata in massa attraverso la girante, kg/s
T = coppia torcente, m N
Vti = velocità tangenziale in ingresso (immissione), m/s
ri = raggio sezione di ingresso, m
Vto = velocità tangenziale in uscita (scarico), m/s
ro = raggio sezione di uscita, m
Si consideri ora il sistema di Fig. 27. La portata da misurare viene indirizzata attraverso un
elemento rotante, che viene azionato da un motore che lavora a velocità costante. Se la portata in
ingresso non ha componenti di rotazione (Vti = 0) e se la lunghezza assiale della girante è sufficiente
per garantire Vto = ω r allora la coppia motrice che è necessario fornire all’elemento rotante è:
T = r2 ω G
(Eq. 4.1)
Dato che sia ω che r sono costanti allora la coppia T (che può essere misurata in vari modi)
costituisce una misura diretta e lineare della portata in massa G. Un inconveniente di questa
soluzione è che, a causa degli attriti e delle variazioni di viscosità del fluido, in condizioni di portata
nulla (G = 0) la coppia non si annulla perfettamente. Una variante di questo approccio è quella di
comandare la girante con una coppia costante: in tal modo la velocità angolare ω della girante varia
con G in accordo alla legge:
ω=
T
G r2
(Eq. 4.2)
La velocità ω risulta ora non lineare con G ma può essere più semplice da misurare di quanto lo
sia la coppia. Se viene utilizzato un trasduttore di prossimità magnetico per misure di velocità
l’intervallo di tempo t tra due impulsi è inversamente proporzionale a ω; in questo modo la misura
di t risulta lineare con G.
Fig. 27 – Elemento a momento angolare
Un’ulteriore variante è mostrata in Fig. 28 anche in questo caso una girante comandata da un
motore a velocità costante comunica momento angolare al fluido; tuttavia nessuna misura di coppia
o di velocità angolare viene effettuata su questa girante. Nelle vicinanze, a valle, una seconda
girante (turbina) viene trattenuta dal girare, per mezzo di un vincolo elastico. Per la prima girante
(pompa), Vto = ω r; inoltre questa velocità diventa Vti per la turbina. Dato che la turbina non può
ruotare, se quest’ultima è sufficientemente lunga in direzione assiale allora il momento angolare
viene eliminato e Vto per la turbina risulta nulla. Allora la coppia sulla turbina è fornita dalla Eq.
4.1. Se il vincolo elastico è lineare la deformazione θ è una misura diretta e lineare di G e può
essere trasdotta in un segnale elettrico in molti modi. Il disco di disaccoppiamento riduce
l’accoppiamento viscoso tra la girante della pompa e la turbina così che sulla girante della turbina
agisca la coppia viscosa minima in corrispondenza di una portata nulla. Esistono numerose varianti
basate sul principio di funzionamento sopra accennato.
Fig. 28 – Misuratore di portata in massa a momento angolare
Il misuratore ad effetto Coriolis (Fig. 29) è privo di ostruzioni, è essenzialmente insensibile
alle variazioni di viscosità, pressione e temperatura del fluido e può essere utilizzato sia con liquidi
che con gas.
Fig. 29 – Misuratore di portata in massa ad effetto Coriolis
Fig. 30 – Misuratore di portata in massa ad effetto Coriolis di tipo commerciale
Il suo principio di funzionamento è basato sulla coppia generata dalla accelerazione di Coriolis
sviluppata dal fluido che passa attraverso un tubo a forma di C vincolato a mensola. Il tubo è
mantenuto in vibrazione flessionale stazionaria con un regime sinusoidale (alla sua frequenza
propria, tra 50 Hz e 80 Hz, modellandolo come una trave a mensola) da un sistema magnetico
retroazionato. Questo è un sistema di controllo auto-alimentato che lavora sempre in corrispondenza
della frequenza propria della mensola (e quindi con richiesta di potenza minima), anche quando tale
frequenza varia per effetto del cambiamento della densità del fluido. Questo viene realizzato
derivando il segnale del motore, che fornisce la forza, da un avvolgimento sensibile alla velocità,
avvolto sulla medesima struttura su cui è posto l’avvolgimento del motore (pertanto, i due
avvolgimenti condividono lo stesso nucleo magnetico). L’ampiezza viene stabilizzata col controllo
retroazionato, che confronta la tensione dell’avvolgimento sensibile (velocità) con un segnale di
riferimento imposto. La particolare configurazione meccanica (tipo “diapason”) minimizza la forza
di vibrazione che si deve fornire al telaio. Nella configurazione tipica, il vettore ω della velocità
angolare del movimento oscillatorio prodotto dalla flessione del tubo a C attorno ai suoi supporti è
ortogonale alla velocità V del fluido. Con riferimento alla Fig. 29, per un’analisi semplificata del
principio di funzionamento, ω è trattata come la rotazione di un corpo rigido attorno ad un asse
fisso e la portata di fluido è rappresentata tramite un’unica velocità V, invece che attraverso un
profilo di velocità. L’accelerazione assoluta di un punto individuato da un vettore ρ, che parte
dall’origine – individuata da un vettore R che esce da un punto di riferimento fisso – di un sistema
di coordinate rotante definito da un vettore di velocità angolare ω, è data da
&& + ω × (ω × ρ ) + ω& × ρ + ρ&& + 2ω × ρ&
&r& = R
r
r
(Eq. 4.3)
= V. I sensori di movimento del misuratore di
Per il nostro esempio R = 0, quindi = 0 e
flusso sono sensibili all’angolo di torsione θ; dunque, siamo interessati soltanto a quelle forza
d’inerzia che causano una sollecitazione di torsione. Nell’equazione di sopra, l’unico termine di
: un elemento di massa di fluido dM in
questo tipo è l’accelerazione di Coriolis 2
corrispondenza di ρ fornisce un contributo alla forza d’inerzia pari a (dM)( 2
) e direzione
. Poiché V cambia di segno quando il fluido percorre i due rami del tubo a C, due
opposta a
masse elementari dM generano una coppia elementare dT, che integrata lungo l’intera lunghezza
fornisce la coppia torsionale d’inerzia T:
⎛G ⎞
dT = 2(2ω × V )(dM )d = 2(2ω × V )⎜ dρ ⎟d
⎝V
⎠
L
L
T = ∫ dT = 4ωGd ∫ dρ = 4 LdωG
0
0
(Eq. 4.4)
(Eq. 4.5)
Poiché la velocità angolare ω oscilla sinusoidalmente, anche la coppia T avrà un andamento
sinusoidale. La frequenza di questa oscillazione forzata prodotta dalla coppia T è ben al di sotto
della frequenza propria torsionale del tubo. Il sistema torsionale agisce come un sistema massamolla con rigidezza Ks, permettendo il calcolo dell’angolo di torsione θ:
θ=
4 Ldω
G
Ks
(Eq. 4.6)
I trasduttori di spostamento P1 e P2 (di tipo ottico o magnetico), collocati come mostrato in
figura nei pressi della posizione neutra del tubo, sono di tipo on-off (dunque non di tipo
proporzionale) e generano un impulso quando il tubo passa in corrispondenza della loro posizione.
A causa della torsione θ uno dei trasduttori verrà triggerato un intervallo di tempo Δt più in ritardo
dell’altro. Se la velocità media in questo intervallo di tempo è indicata con ωav, allora avremo
θ=
( Lωav ) Δt Lω Δt
≈
2d
2d
(Eq. 4.7)
in cui la velocità angolare istantanea può essere considerata uguale a quella media a causa del fatto
che il movimento viene rilevato su una piccola frazione del ciclo totale. Combinando la (Eq. 4.6) e
la (Eq. 4.7) si ottiene infine:
G=
Ks
Δt
8d 2
(Eq. 4.8)
nella quale Δt è una misura lineare della portata in massa. Siccome Δt è misurato una volta per ogni
ciclo di flessione, il misuratore è in grado di rispondere in modo rapido a portate variabili; in
pratica, tuttavia, al fine di migliorare l’accuratezza, la misura viene mediata su più cicli.
La configurazione con tubo a C del misuratore ad effetto Coriolis è solo una delle possibili
soluzioni costruttive: la Fig. 31 (Direct Measurement Corp., Longmont, CO) mostra varie
configurazioni possibili, alcune delle quali vengono impiegate nella strumentazione commerciale.
Fig. 31 – Varie configurazioni per misuratore di portata in massa ad effetto Coriolis
I misuratori termici, utilizzati per la misura della portata massica dei gas, sono costituiti da
due avvolgimenti resistivi che assolvono la duplice funzione di elementi riscaldatori e di sensori di
temperatura, e sono collegati su due rami adiacenti di un circuito a ponte. Nello schema di misura
più comune (Fig. 32), viene effettivamente misurata soltanto una frazione della portata totale
(principio del by-pass). Il valore di quest’ultima è ottenuto moltiplicando il dato misurato per un
fattore di proporzionalità, assunto costante e noto: ciò consente di misurare portate notevoli con un
misuratore più piccolo ed economico. Per garantire un rapporto fissato tra il flusso principale e il
limitato flusso di by-pass, entrambe le zone di passaggio delle portate vengono progettate in modo
da avere un flusso laminare sull’intero campo di misura dello strumento (per regolarizzare il flusso
principale vengono utilizzate canalette sottili di sezione rettangolare, inserite lungo il perimetro di
un cilindro). Poiché la caduta di pressione tra i due rami è la stessa, ne consegue che la portata
principale è sempre proporzionale alla portata rilevata nel by-pass. Il rapporto delle portate varia da
1 (per i misuratori più piccoli) a 100 000 (per quelli più grandi).
Fig. 32 – Misuratore di portata in massa di tipo termico
Gli avvolgimenti elettrici vengono applicati esternamente alla tubazione di misura. In
condizioni di portata nulla (
= 0) la distribuzione di temperatura nel tratto interessato è
simmetrica (ΔT = T1 –T2 = 0) e, scegliendo opportunamente le resistenze, il ponte risulta bilanciato
(uscita di tensione nulla). In questa condizione, l’energia termica fornita dalle resistenze elettriche
viene utilizzata per bilanciare la perdita di calore dal tubo di misura verso lo spazio circostante, che
si assume rimanere alla temperatura costante Ta. Quando invece la tubazione è attraversata dal
fluido con portata
≠ 0 (moto stazionario), al raggiungimento del nuovo equilibrio termico il
profilo delle temperature tende a diventare asimmetrico (T1 diminuisce, T2 rimane all’incirca
costante). La temperatura T1 decresce poiché il fluido caldo che lascia questa zona sottrae energia
(con rapidità
). In tal modo, per mantenere l’equilibrio termico, viene richiesto un aumento
del trasferimento termico scambiato localmente (dal tubo verso il fluido), e quindi un aumento della
differenza di temperatura tra fluido e tubo. Perché ciò avvenga, T1 deve diminuire in maniera
proporzionale a . La temperatura T2 varia in modo limitato poiché in quella regione la quantità di
calore perduto viene rimpiazzata dal nuovo fluido caldo che arriva. Sebbene il segnale di portata
massica desiderato sia principalmente associato a T1, l’utilizzo del segnale ΔT, reso disponibile
dallo schema a ponte, presenta il vantaggio di fornire un segnale nullo per portata nulla e di rendere
lo strumento meno sensibile alla temperatura ambiente, visto che T1 e T2 risentono della variazione
di Ta circa allo stesso modo. Gli strumenti commerciali hanno un fondo scala variabile da 10
cm3/min fino ad oltre 6 m3/min. L’accuratezza ottenibile è di circa 1% del fondo scala.