© Maxwell 2011
ESERCIZI DI CALCOLO NUMERICO
Formule di quadratura
Esercizio 1 :
Costruire la formula di quadratura interpolatoria del tipo
4
∫ f (x )dx ≅ w f (1) + w f (2) + w f (3)
0
1
2
0
classificandola e determinandone l’ordine di accuratezza polinomiale.
Soluzione:
Per costruzione una formula interpolatoria su n nodi è esatta per i polinomi
p n −1 ( x ) . L’ordine di accuratezza polinomiale è il massimo grado d dei polinomi per
cui la formula è esatta: la formula è esatta per TUTTI i polinomi di grado minore o
uguale a d ed esiste almeno un polinomio di grado d + 1 per cui la formula NON è
esatta.
Per prima cosa classifichiamo la formula.
I nodi sono 3 e sono i punti di ascissa 1 , 2 e 3 . Gli estremi di integrazione non
sono nodi, quindi la formula è di tipo aperto.
I nodi sono equidistanti fra di loro e sono equidistanti dagli estremi.
Quindi stiamo ricercando una formula di Newton–Cotes aperta, costruita su tre
nodi.
N.B.: NON è la formula di Cavalieri–Simpson perché la formula richiesta non è
chiusa.
L’ordine di accuratezza polinomiale è 3 .
Ricaviamo ora la formula di quadratura.
prima tecnica: integrare il polinomio di Lagrange
(x − 2)(x − 3) = 1 (x − 2)(x − 3)
(1 − 2)(1 − 3) 2
(x − 1)(x − 3) = −(x − 1)(x − 3)
l1 ( x ) =
(2 − 1)(2 − 3)
(x − 1)(x − 2) = 1 (x − 1)(x − 2)
l 2 (x ) =
(3 − 1)(3 − 2) 2
l 0 (x ) =
1
© Maxwell 2011
4
4
(
4
)
1
1
1 1
5
1 64
8
w0 = ∫ ( x − 2 )( x − 3)dx = ∫ x 2 − 5 x + 6 dx = x 3 − x 2 + 6 x = − 40 + 24 =
2
20
2 3
2
3
0 2 3
0
Dato che i nodi sono simmetrici rispetto al punto medio dell’intervallo [0,4] , è
possibile concludere che
w2 = w0 =
8
3
4
∫ l (x )dx
per controllo è possibile verificare che risolvendo
2
si ottiene
0
8
.
3
4
Similmente, è possibile calcolare w1 risolvendo
∫ l (x )dx . Tuttavia, ricordando che
1
0
∑w
i
i
4
8 8
= b − a , si ricava che w1 = (b − a ) − (w0 + w2 ) = 4 − + = − .
3
3 3
seconda tecnica: imporre che la formula sia esatta sui polinomi 1 , x e x 2
4
1 : w0 ⋅ 1 + w1 ⋅ 1 + w2 ⋅ 1 = ∫ 1dx = 4
0
4
x : w0 ⋅ 1 + w1 ⋅ 2 + w2 ⋅ 3 = ∫ xdx =
0
4
1 2
x
2
4
=8
0
1
x : w0 ⋅ 1 + w1 ⋅ 4 + w2 ⋅ 9 = ∫ x dx = x 3
3
0
4
=
2
2
0
64
3
Si ottiene un sistema lineare da risolvere con eliminazione gaussiana:
w0 + w1 + w2 = 4
w0 + 2 w1 + 3w2 = 8
64
w0 + 4 w1 + 9 w2 =
3
1 1 1
1 1 1
4
4
4
1 1 1
1 2 3 8 ⇒ A ( 2 ) = 0 1 2
4 ⇒ P23 A (2 ) = 0 3 8 52 ⇒
3
0 1 2
1 4 9 64
0 3 8 52
4
3
3
⇒ A (3 )
1 1
1
= 0 3
8
0 0 − 2
3
4
52
3
16
−
9
2
© Maxwell 2011
w2 = −
16 1
16 3 8
=
=
9 2 9 2 3
−
3
81
12
4
52
w1 = − 8 = − = −
3 3
9
3
3
4 8 1 8
w0 = 4 − − − =
3 31 3
Per costruzione l’ordine della formula è almeno 2 .
Come si comporta con i polinomi di terzo grado?
4
8
4
8
1
x : ⋅ 1 − ⋅ 8 + ⋅ 27 = ∫ x 3 dx = x 4
3
3
3
4
0
4
= 64 ⇒
3
0
8
(1 − 4 + 27 ) = 64
3
L’uguaglianza è verificata e quindi la formula è esatta sulla base 1, x, x 2 , x 3
dei
polinomi di terzo grado. Perciò è esatta per tutti i polinomi di grado almeno 3 .
Come si comporta con i polinomi di quarto grado?
4
8
4
8
1
x : ⋅ 1 − ⋅ 16 + ⋅ 81 = ∫ x 4 dx = x 5
3
3
3
5
0
4
=
4
0
1 5
8
1
⋅ 4 ⇒ (1 − 8 + 81) ≠ 4 5
5
3
5
L’uguaglianza non è verificata e quindi esiste almeno un polinomio di grado 4 per
cui la formula non è esatta.
Per questo motivo l’ordine di accuratezza polinomiale è 3 .
Esercizio 2 :
Classificare, se possibile, la seguente formula di quadratura
4
∫ f (x )dx ≅ w f (0) + w f (2) + w f (3) .
0
1
2
0
Soluzione:
È una formula semiaperta (o semichiusa). Non è di Newton–Cotes perché i nodi
non sono equidistanti. Inoltre i nodi non sono simmetrici rispetto al punto medio
dell’intervallo di integrazione.
Non siamo quindi in grado di classificare questa formula di quadratura.
3
© Maxwell 2011
Esercizio 3 :
2
1
Osservando che ln 2 = ∫ dx , si vuole approssimare ln 2 utilizzando la formula dei
x
1
trapezi composita.
Si richiede di
•
stabilire se la stima è per eccesso o per difetto con considerazioni
geometriche;
dimostrare l’affermazione precedente con considerazioni analitiche;
determinare il numero di sottointervalli che si devono utilizzare per ottenere
un errore minore di 10 −4 .
•
•
Soluzione:
1
è monotona decrescente. Inoltre essa è convessa. Per questo
x
motivo, l’errore è sicuramente per eccesso. Infatti, ricordando la definizione di
funzione convessa, un segmento che unisca due punti qualsiasi della funzione si
trova sempre al di sopra di quest’ultima.
La funzione
Dimostrazione analitica:
RN = −
T
f (x ) =
b − a 2 ''
b−a
h f (c ) dove c ∈ (1,2) e h =
.
12
N
1
1
2
, f ' ( x ) = − 2 = − x − 2 , f '' ( x ) = 2 x − 3 = 3 .
x
x
x
RN = −
T
1 1 2
< 0 ∀N , ∀c . Quindi la stima è per eccesso.
12 N 2 c 3
L’errore esatto non è conoscibile, ma è possibile stimarlo:
RN = −
b − a 2 ''
b−a
h f (c ) dove c ∈ (1,2) e h =
12
N
RN = −
1 1 2
1 1
=−
2
3
12 N c
6N 2 c3
T
T
RN
T
=
1 1
6N 2 c3
Nella peggiore delle ipotesi
1
= 1 , quindi
c3
4
© Maxwell 2011
RN
T
1
1
⋅1 =
2
6N
6N 2
≤
È necessario garantire che
1
10 4
100
−4
2
≤
10
⇒
N
≥
⇒N≥
≅ 41
2
6
6N
6
Esercizio 4 :
π
∫ (cos
È dato
)
x + sin 2 x dx .
3
0
Si richiede di
•
•
•
stimare per eccesso l’errore commesso approssimando l’integrale con la
formula dei trapezi composita con N = 10 intervalli;
approssimare l’integrale con la formula di Cavalieri–Simpson composita su
N = 2 intervalli;
confrontare in numero di intervalli richiesti nei due casi, nonché in numero
di valutazioni di funzione da eseguire, per avere un errore minore o uguale
a 10 −6 .
Soluzione:
L’errore di quadratura per la formula dei trapezi è
RN = −
T
b − a 2 ''
b−a
h f (c ) dove c ∈ (a, b ) , h =
.
12
N
Le derivate prima e seconda della funzione sono
f ( x ) = cos 3 x + sin 2 x
f ' ( x ) = 3 ⋅ cos 2 x ⋅ (− sin x ) + 2 sin x cos x = −3 sin x cos 2 x + sin 2 x
(
)
f '' ( x ) = −3 cos 3 x + sin x ⋅ 2 ⋅ cos x ⋅ (− sin x ) + 2 cos 2 x = −3 cos 3 x + 6 sin 2 x cos x + 2 cos 2 x =
(
)
.
= −3 cos 3 x + 6 1 − cos 2 x cos x + 2 cos 2 x = −9 cos 3 x + 6 cos x + 2 cos 2 x
Tutte queste funzioni trigonometriche possono essere maggiorate con il valore 1 ,
quindi
f ' ( x ) ≤ 3 cos x + 6 sin x cos x + 2 cos 2 x = 3 + 6 + 2 = 11 .
3
2
La stima per eccesso dell’errore risulta
R10 ≤
T
π π
2
11 3
⋅ ⋅ 11 =
π ≅ 0.28 .
2 10
1200
5
© Maxwell 2011
Per calcolare l’integrale si può applicare direttamente la formula di Cavalieri–
Simpson composita:
I2 =
S
h
π
π
3
f (0 ) + 4 f + 2 f + 4 f π + f (π ) .
6
4
2
4
Nel nostro caso h =
I2 =
S
π
2
=
b−a
, perciò
N
(
π
)
π
1 2 1
1 2 1
π
+ + 2 ⋅ 1 + 4 −
+ + (− 1) =
1 + 4
1+ 2 + 2 + 2 − 2 + 2 −1 =
12
2
2
2
2 2
2 2
12
Per garantire un errore minore di 10 −6 è sufficiente imporre che R N
RN
≤ 10 −6 . Si ricorda che R N = −
S
T
T
≤ 10 −6 e che
b − a 2 ''
b − a 4 (4 )
S
h f (c ) e che R N = −
h f (c ) .
12
2880
Il comportamento dell’errore più critico si ha per il valore massimo della derivata.
Infatti è in questa condizione che il modulo dell’errore di quadratura potrebbe
diventare maggiore del valore richiesto dal problema. È sufficiente quindi cercare
il numero di intervalli necessari usando come valore della derivata proprio il
massimo.
Tuttavia non sempre è semplice trovare questo massimo. Nei casi in cui non sia
immediato, o ragionevolmente semplice, determinare questo valore studiando
l’andamento della funzione f '' ( x ) , è sufficiente cercare una maggiorazione M
della derivata. Ad esempio, se riesco ad affermare che f '' ( x ) ≤ M ∀x ∈ [a, b] allora
vale la seguente disuguaglianza R N
T
≤
b−a 2
h M . Un risultato analogo si trova con
12
S
RN .
Le derivate della funzione necessarie sono fino alla quarta. Per le prime due si
rimanda a quanto ottenuto al primo punto. Le rimanenti sono
f ''' ( x ) = −27 cos 2 x ⋅ (− sin x ) + 6(− sin x ) + 4 cos 2 x ⋅ (− sin 2 x ) =
= 27 cos 2 x sin x − 6 sin x − 4 sin 2 x cos 2 x = 27 cos 2 x sin x − 6 sin x − 2 sin 4 x
(
)
f (4 ) ( x ) = 27 2 cos x ⋅ (− sin x )sin x + cos 2 x cos x − 6 cos x − 8 cos 4 x =
(
)
.
= 27 cos 3 x − 2 cos x sin 2 x − 6 cos x − 8 cos 4 x
Si cerca ora una maggiorazione ragionevole della derivata quarta, dato che la sua
espressione piuttosto complessa non permette uno studio di funzione rapido:
f (4 ) ( x ) ≤ 27 ⋅ 3 + 6 + 8 = 81 + 6 + 8 = 95 .
6
© Maxwell 2011
Utilizzando tale maggiorazione è possibile calcolare il numero di intervalli richiesti
e il numero di valutazioni di funzione necessarie nei due casi:
RN
T
RN
S
π π2
11 3 1
π ⋅ 2
2 N
12
N
.
4
π π
95 5 1
≤
⋅ 95 =
π ⋅ 4
2880 N 4
2880
N
≤
2
⋅ 11 =
Risolvendo si ha
trapezi:
11 3 1
11
11
π ⋅ 2 < 10 −6 ⇒ N 2 > π 310 6 ⇒ N > 10 3 π
π = 5332 ;
12
12
12
N
Cavalieri–Simpson:
95 5 1
95 5 6
95
π ⋅ 4 < 10 −6 ⇒ N 2 >
π 10 ⇒ N > 10π 4
π 10 2 = 57 .
2880
2880
2880
N
Riassumendo:
trapezi
5332
5333
numero di intervalli
valutazioni di f ( x )
Cavalieri–Simpson
57
115
Il risultato ottenuto è ragionevole perché l’errore di Cavalieri–Simpson decresce
come h 4 , mentre quello della formula dei trapezi tende a zero come h 2 .
Esercizio 5 :
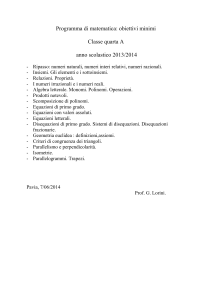
1
2
Per approssimare l’integrale
∫ x dx
si applichi la formula dei trapezi composita
1
−
2
prima con 3 e poi con 4 nodi. Si calcoli in entrambi i casi l’errore commesso
confrontando l’approssimazione con l’integrale esatto e si commenti il risultato.
Soluzione:
N.B.: si considereranno solamente nodi equidistanti.
Dato che la funzione è di classe C 0 , non è possibile stimare l’errore con la solita
formula.
Per prima cosa è necessario calcolare l’integrale esatto:
I=
1
2
1
∫ x dx = 4
−
1
2
7
© Maxwell 2011
0,5
0,4
0,3
0,2
0,1
0
-0,5
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0,5
Applicando invece la formula dei trapezi si ottiene:
con 3 nodi: I 2 =
T
1 1
h 1
b−a b−a 1
1 1 1
f − + 2 f (0 ) + f = + 0 + = dove h =
=
=
2 2
2 4
N
2
2
2 4 2
l’errore calcolato è R2 =
T
1 1
− =0
4 4
h 1
1
1
f − + 2 f − + 2 f +
2 2
6
6
b−a b−a 1
dove h =
=
=
N
3
3
con 4 nodi: I 3 =
T
l’errore calcolato è R3 =
T
1 1 1 2 2 1 1 5 5
f = + + + = =
2 6 2 6 6 2 6 3 18
1 5
1
− =− .
4 18
36
Per capire meglio cosa significano questi risultati si può calcolare l’integrale
considerando 5 nodi:
h 1 1
1
1
f − + 2 f − + f (0) + f + f =
2 2 4
4
2
b−a b−a 1
dove h =
=
=
N
4
4
I4 =
T
l’errore calcolato è R4 =
T
11
1 1 1
2 1
1
+ 2 + 0 + + = (2) = =
82
4 2 8
8 4
4
1 1
− = 0.
4 4
8
© Maxwell 2011
Con un numero di intervalli pari l’errore è nullo; con un numero di intervalli
dispari, invece, l’errore è diverso da zero. Infatti, se il punto angoloso della
funzione x è uno dei nodi, allora l’approssimare la funzione stessa con delle rette
(come fa la formula dei trapezi) non genera errori, in quanto non vi sono intervalli
che abbiano i due estremi entrambi non nulli e con segni discordi. Al contrario,
se il numero di intervalli è dispari, uno di essi si troverà sicuramente “a cavallo”
dell’origine e quindi, in quell’intervallo, la formula dei trapezi commetterà un
errore. In particolare la stima sarà per eccesso e perciò l’errore sarà negativo.
Esercizio 6 :
Ricavare i pesi della formula di Cavalieri–Simpson.
Soluzione:
La formula generica è
b
∫ f (x )dx ≅ w f (a ) + w
1
a
2
a+b
f
+ w3 f (b ) .
2
Per calcolare i pesi w1 , w2 e w3 si impone che la formula sia esatta sulle funzioni
1, x , x 2 :
b
1 : w1 + w2 + w3 = ∫ 1dx = b − a
a
a+b
1
w2 + bw3 = ∫ xdx = x 2
2
2
a
b
x : aw1 +
b
=
a
(
1 2
b − a2
2
1 3
a+b
2
2
x : a w1 +
w2 + b w3 = ∫ x dx = x
3
2
a
2
2
b
b
=
2
a
)
(
)
1 3
b − a3 .
3
Il sistema lineare ottenuto può essere risolto con eliminazione gaussiana:
1
a
a2
1
a+b
2
2
a
+
b
2
1
b
b2
1
2
1
3
b − a 1
1
1
b−a
2
2
b − a ⇒ 0
b−a
2
b − a 3a + b 2
2
b −a
b 3 − a 3 0
2 2
(
)
(
)
b−a
1
2
(b − a )
⇒
2
1
(b − a ) b 2 − 2a 2 − ab
3
(
)
9
© Maxwell 2011
1
1
b−a
⇒ 0
2
0
0
1
b−a
1 2
b−a
b − a2 .
2
b−a 1
(b − a )
(b − a )3
2 12
(
)
w1
A questo punto, per ottenere la soluzione w2 è sufficiente effettuare una
w
3
sostituzione all’indietro.
10