Le logiche basate sulle norme triangolari e sui loro residui
prima stesura, da rivedere
Introduzione
Evidenziamo alcune caratteristiche della logica proposizionale di Gödel G.
1. Linguaggio: l’insieme dei connettivi è L = {∧, ∨, →, ¬, ⊥, ⊤}, lo stesso della logica proposizionale
Booleana B.
2. L’insieme dei valori di verità è costituito dall’intervallo reale unitario [0, 1]. (Mentre la logica
Booleana ha come insieme di valori di verità l’insieme di due elementi {0, 1}.) In particolare il valore
0 è attribuito a un’asserzione assolutamente falsa, mentre il valore 1 a un’asserzione assolutamente
vera; i valori intermedi sono attribuiti ad asserzioni sfumate, cioè vere, per cosı̀ dire, fino a un certo
punto.
3. L’interpretazione dei connettivi è verofunzionale, vale a dire che il valore di una formula φ = ψ ∗ ϑ,
dove ∗ è uno dei connettivi binari in L, sotto un assegnamento µ : V ar → [0, 1], dipende solo dal
valore assunto sotto µ dalle sottoformule ψ e ϑ di φ e dalla semantica fissata I∗ : [0, 1]2 → [0, 1] del
connettivo ∗:
µ(φ) = I∗ (µ(ψ), µ(ϑ)) .
Per esempio:
µ(ψ ∧ ϑ) = I∧ (µ(ψ), µ(ϑ)) ,
dove
I∧ (x, y) = min{x, y} .
Lo stesso discorso si applica ai connettivi di arità non binaria: per esempio ecco l’interpretazione
I¬ : [0, 1] → [0, 1] del connettivo unario di negazione ¬.
{
µ(¬ψ) = I¬ (µ(ψ)),
I¬ (x) =
1
0
se x = 0
altrimenti
Si noti che la verofunzionalità è un requisito piuttosto forte. Vi sono infatti forme naturali di
ragionamento che non sono vero-funzionali. Consideriamo ad esempio la teoria delle probabilità.
Supponiamo di valutare la probabilità di due eventi distinti A e B come P rob(A) = P rob(B) =
c ∈ [0, 1]. Possiamo identificare P rob con un assegnamento µ di valori di verità agli eventi in [0, 1],
vale a dire µ(A) = µ(B) = c. Gli eventi A e B hanno in genere un certo grado di interdipendenza
stocastica, un certo grado di correlazione. Per concretezza supponiamo che A sia l’evento Domani
pioverà e che B sia l’evento Il Brasile vincerà i prossimi mondiali di calcio. Ora, non sembra
1
plausibile che i due eventi siano correlati in maniera significativa, ma il principio di verofunzionalità,
se valesse nella teoria delle probabilità, ci porterebbe a concludere che µ(A → B) = 1, dato che
µ(A → A) = 1 e µ(A) = µ(B), vale a dire, l’evento Se domani pioverà allora il Brasile vincerà i
mondiali avrebbe la probabilità dell’evento certo. Ovviamente questa conclusione è inaccettabile
nella teoria delle probabilità. Analoghe considerazioni valgono per altre forme di ragionamento,
quali quelli modellati dalle logiche modali.
4. I connettivi si comportano come gli analoghi connettivi Booleani sui valori Booleani. Vale a dire che
l’interpretazione I∗ di un connettivo è tale cha la sua restrizione ai valori Booleani {0, 1} coincide
con la tavola di verità del connettivo ∗ nella logica Booleana.
Per esempio:
x
0
1
I¬ (x)
1
0
x
0
0
1
1
y
0
1
0
1
I∧ (x, y)
0
0
0
1
x
0
0
1
1
y
0
1
0
1
I→ (x, y)
1
1
0
1
5. Per quanto riguarda i valori intermedi (o sfumati) l’interpretazione dei connettivi gode di alcune
proprietà che possiamo giudicare ragionevoli. Ad esempio, la congiunzione ∧ è interpretata da un
operatore che è associativo e commutativo, monotono non-decrescente in entrambi gli argomenti,
avente 0 come elemento assorbente e 1 come elemento neutro.
Queste proprietà sono ragionevoli in quanto riflettono alcune caratteristiche di ciò che ci aspettiamo
sia una congiunzione. La commutatività riflette il fatto che il valore di una congiunzione di asserzioni
non dipenda dall’ordine in cui i congiunti sono presi. L’associatività riflette il fatto che il valore di
una congiunzione di n asserzioni (per qualche n finito) può essere calcolato combinando le asserzioni
in qualsiasi modo: detto altrimenti, possiamo eliminare le parentesi da ogni espressione che coinvolga
solo congiunzioni. La monotonia riflette il fatto che tanto più vere sono due asserzioni tanto più vera
deve essere il valore di verità della loro congiunzione. Infine, la congiunzione di un’asserzione con una
falsità assoluta deve essere una falsità assoluta ed analogamente, la congiunzione di un’asserzione
con una verità assoluta deve essere tanto vera quanto l’asserzione stessa.
6. Nella logica di Gödel si può esprimere una versione sfumata della regola di inferenza Modus Ponens:
φ→ψ
.
ψ
φ
La versione sfumata del Modus Ponens si riflette nella seguente proprietà, che vale per ogni coppia
di formule φ, ψ e ogni assegnamento µ : V ar → [0, 1]. Per ogni b ∈ {0, 1}:
µ(φ) ∧ b ≤ µ(ψ)
⇐⇒
b ≤ µ(φ → ψ) .
(La discussione sul modus ponens sfumato sarà ripresa nella sezione dedicata al residuo di una
t-norma).
7. L’interpretazione min(x, y) della congiunzione ∧ è una funzione continua1 .
1 Si
ricorda che una funzione f : [0, 1]2 → [0, 1] è continua se per ogni (x0 , y0 ) ∈ [0, 1]2 vale che
lim
(x,y)→(x0 ,y0 )
f (x, y) = f (x0 , y0 ) .
2
Le caratteristiche appena enumerate non sono solo appannaggio della logica di Gödel. Infatti esiste una
classe contenente infinite logiche polivalenti, tutte distinte tra loro, che hanno tutte queste caratteristiche
(con una piccola modifica al linguaggio L, dove saranno contemplati due simboli distinti per due tipi di
congiunzione distinte, chiamate forte e debole). Rilassando opportunamente l’ultima proprietà si ottiene
una classe ancora più grande di logiche che contiene propriamente la precedente.
Norme Triangolari
Vediamo come possiamo fissare una logica in questa classe scegliendo in maniera opportuna l’interpretazione del connettivo di congiunzione forte.
Definizione 1. Una norma triangolare, o t-norma, è un operatore
∗ : [0, 1]2 → [0, 1]
tale che, per ogni x, y, z, y1 , y2 ∈ [0, 1] valgono le seguenti proprietà:
• (Associatività): x ∗ (y ∗ z) = (x ∗ y) ∗ z;
• (Commutatività): x ∗ y = y ∗ x;
• (Monotonia non-decrescente): Se y1 ≤ y2 allora x ∗ y1 ≤ x ∗ y2 ;
• (Elemento assorbente): x ∗ 0 = 0;
• (Elemento neutro): x ∗ 1 = x.
Si noti che dalla commutatività e dalla monotonia segue che per ogni x1 , x2 , y ∈ [0, 1], se x1 ≤ x2 allora
x1 ∗ y ≤ x2 ∗ y.
Dalla definizione di t-norma si nota immediatamente che ogni t-norma ∗ soddisfa le proprietà 3, 4 e 5
elencate nell’introduzione. Le t-norme si pongono quindi come candidati ideali per l’interpretazione del
connettivo di congiunzione nelle logiche verofunzionali che hanno l’intervallo [0, 1] come insieme dei valori
di verità.
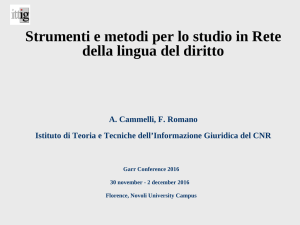
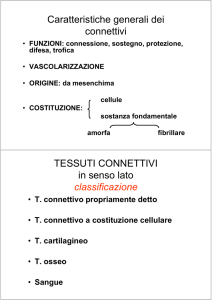
Esempio 2. Esistono infinite t-norme distinte. Eccone alcuni esempi (si vedano anche i grafici nella
Figura 1).
• t-norma di Gödel:
• t-norma prodotto:
• t-norma di Lukasiewicz:
• t-norma prodotto drastico:
x ∧ y = min{x, y} .
x · y = xy .
x ⊙ y = max{0, x + y − 1} .
x
y
x ∗P D y =
0
3
se y = 1
se x = 1
altrimenti
• t-norma minimo nilpotente:
{
x ∗N M y =
min{x, y}
0
se x + y > 1
altrimenti
• Le seguenti funzioni non sono t-norme: x + y, max{x, y}, min{x, 2y}, x − y, 0, max{0, x − y}.
Perché?
1.0
1.0
0.5
1.0
0.5
0.0
0.5
0.0
1.0
0.0
1.0
0.5
1.0
0.5
0.0
0.5
0.0
0.0
0.0
0.0
0.0
0.5
0.5
0.5
1.0
1.0
(a) x ∧ y.
1.0
(b) x · y.
(c) x ⊙ y.
1.0
1.0
0.5
0.5
0.0
1.0
0.0
1.0
0.5
0.5
0.0
0.0
0.0
0.0
0.5
0.5
1.0
1.0
(d) x ∗P D y.
(e) x ∗N M y.
Figura 1: I grafici delle t-norme definite in Esempio 2.
Si noti che le t-norme ∧, ⊙, · sono continue, mentre le t-norme ∗P D e ∗N M non lo sono. In particolare
∗P D è continua da destra, vale a dire
lim
(x,y)→(x0 ,y0 )+
(x ∗P D y) = x0 ∗P D y0 ,
mentre ∗N M è continua da sinistra, vale a dire
lim
(x,y)→(x0 ,y0 )−
(x ∗N M y) = x0 ∗N M y0 .
Come vedremo nella nostra discussione sul connettivo di implicazione, restringeremo lo spettro delle possibili interpretazioni del connettivo di congiunzione forte solo alle t-norme continue da sinistra (ovviamente
una t-norma continua è anche continua da sinistra).
4
Consigli pratici
Le proprietà definitorie delle t-norme sono quasi tutte riscontrabili con semplici accorgimenti nel grafico
delle t-norme stesse.
In particolare, sia f : [0, 1]2 → [0, 1] una funzione di due variabili. Allora
• f è commutativa se e solo se il suo grafico è simmetrico rispetto alla retta y = x.
• f è non decrescente se e solo se per ogni (x0 , y0 ) ∈ [0, 1]2 la funzione g : [0, 1]2 → [0, 1] definita da
g(x, y) = f (x, y) − f (x0 , y0 ) è tale che
(x, y) ∈ [x0 , 1] × [y0 , 1]
=⇒
g(x, y) ≥ 0 .
• Se f è una t-norma allora il comportamento di f ai bordi del dominio di definizione [0, 1]2 è fissato:
per ogni x, y ∈ [0, 1],
f (x, 0) = f (0, y) = 0,
f (x, 1) = x,
f (1, y) = y .
In principio anche l’associatività di f può essere riscontrata attraverso caratteristiche geometriche del
suo grafico, ma queste caratteristiche sono considerevolmente più complicate da verificare.
Il Residuo di una t-norma
Stiamo cercando di definire una classe di logiche polivalenti verofunzionali. Abbiamo deciso che il connettivo di congiunzione forte dovrà essere interpretato da una t-norma. Introdurremo ora la classe di
operatori che interpreteranno il connettivo di implicazione.
Anche in questo caso, stiliamo una lista di proprietà considerate ragionevoli per un tale operatore
⇒ : [0, 1]2 → [0, 1].
In primo luogo richiediamo le proprietà elencate ai punti 3, 4 e 5 nell’introduzione. Dunque richiediamo
che ⇒ coincida sui valori Booleani 0 e 1 con la tavola di verità dell’implicazione nella logica Booleana.
Richiediamo anche che:
Se
x≤y
allora
x ⇒ y = 1.
Infatti è ragionevole aspettarsi, da un’implicazione verofunzionale, che ogni volta che la premessa è meno
vera della conclusione, allora l’intera implicazione sia assolutamente vera.
Inoltre richiediamo che tali operatori siano non-crescenti nel primo argomento e non-decrescenti nel
secondo argomento.
Un operatore ⇒ : [0, 1]2 → [0, 1] è detto:
• non-crescente nel primo argomento se per ogni x1 , x2 , y ∈ [0, 1] vale che
x1 ≤ x2
implica
x1 ⇒ y ≥ x2 ⇒ y .
• non-decrescente nel secondo argomento se per ogni x, y1 , y2 ∈ [0, 1] vale che
y1 ≤ y2
implica
x ⇒ y1 ≤ x ⇒ y2 .
La giustificazione di questa richiesta deriva dal fatto che è ragionevole aspettarsi che, nel caso in cui il
valore di verità della premessa supera quello della conclusione, quanto più piccola è la differenza tra i
valori di verità di premessa e conclusione, tanto più grande (vicino a 1) deve essere il valore di verità
dell’intera implicazione.
Queste richieste non fissano ancora la semantica del connettivo di implicazione. Per determinare un unico
operatore ⇒∗ associato alla t-norma ∗, dobbiamo introdurre un vincolo ulteriore.
5
Una versione sfumata del Modus Ponens
Richiediamo la correttezza di una versione sfumata della regola di inferenza Modus Ponens (si veda il
punto 6 nell’elenco riportato nell’introduzione). In particolare chiediamo che, per ogni assegnamento µ e
ogni coppia di formule φ, ψ valga quanto segue.
Da (una stima inferiore del) valore di verità µ(φ) e da (una stima inferiore del) valore di verità
µ(φ → ψ), si deduce (una stima inferiore del) valore di verità µ(ψ).
Vale a dire:
a ≤ µ(φ)
Se
e
b ≤ µ(φ → ψ)
allora
c ≤ µ(ψ) ,
(1)
dove il valore di c è calcolato a partire dai valori a e b.
Dunque c dipende da a e b. Assumendo, nello spirito della verofunzionalità, che c dipenda solo da a e b e
dalla logica in cui stiamo lavorando, possiamo richiedere l’esistenza di un operatore M P0 : [0, 1]2 → [0, 1]
tale che
• M P0 (a, b) = c.
Abbiamo richieste ulteriori anche su M P0 . In particolare,
• M P0 deve essere non-decrescente in entrambi gli argomenti.
• Per ogni d ∈ [0, 1], deve valere che M P0 (d, 1) = M P0 (1, d) = d.
• Per ogni d ∈ [0, 1], deve valere che M P0 (d, 0) = M P0 (0, d) = 0.
Queste richieste riflettono il fatto che ci aspettiamo che quanto maggiori sono le nostre stime dei valori
delle premesse tanto maggiori deve essere la nostra stima del valore di verità della conclusione. In
particolare, se una delle due premesse è assolutamente vera (vale 1), allora la conclusione deve valere
tanto quanto la premessa. Se, invece, una delle due premesse è assolutamente falsa, ci aspettiamo che
anche la conclusione sia assolutamente falsa.
È dunque ragionevole chiedere che
M P0 (a, b) = a ∗ b ,
dove ∗ è la t-norma che interpreta la congiunzione forte nella nostra logica. (Ovviamente una generica
t-norma possiede altre proprietà, vale a dire la commutatività e l’associatività: si potrebbero enunciare
criteri di ragionevolezza per l’operatore M P0 che si traducano in queste ultime due proprietà, ma per
semplicità ci accontentiamo di quelle già discusse.)
Dunque (1) si riscrive come segue:
Se
a ≤ µ(φ)
e
b ≤ µ(φ → ψ)
allora
a ∗ b ≤ µ(ψ) .
(2)
Supponiamo ora che la nostra stima sul valore di verità di φ sia la migliore possibile, vale a dire: a = µ(φ).
Allora (2) diventa:
Se
b ≤ µ(φ → ψ)
allora
µ(φ) ∗ b ≤ µ(ψ) .
(3)
Ricordiamo che il nostro obiettivo è definire il valore di µ(φ) ⇒∗ µ(ψ) = µ(φ → ψ). A tal fine richiediamo
ora che µ(φ → ψ) sia un confine superiore ai valori b ∈ [0, 1] tali che µ(φ) ∗ b ≤ µ(ψ), dunque:
Se
µ(φ) ∗ b ≤ µ(ψ)
allora
6
b ≤ µ(φ → ψ) .
(4)
Da (3) e (4) immediatamente concludiamo:
µ(φ) ∗ b ≤ µ(ψ)
se e solo se
b ≤ µ(φ → ψ) .
(5)
Per trovare la soluzione a (5) consideriamo innazitutto:
d = sup{b ∈ [0, 1] | µ(φ) ∗ b ≤ µ(ψ)} .
Il valore d esiste sempre, ma potrebbe non fare al caso nostro, potrebbe infatti essere il caso che
d ̸∈ {b ∈ [0, 1] | µ(φ) ∗ b ≤ µ(ψ)} ,
e dunque µ(φ) ∗ d > µ(ψ).
Dobbiamo quindi chiedere anche che:
d ∈ {b ∈ [0, 1] | µ(φ) ∗ b ≤ µ(ψ)} ,
vale a dire
d = max{b ∈ [0, 1] | µ(φ) ∗ b ≤ µ(ψ)} .
(6)
µ(φ) ⇒∗ µ(ψ) := µ(φ → ψ) := max{b ∈ [0, 1] | µ(φ) ∗ b ≤ µ(ψ)} .
(7)
Da (6) definiamo:
Sostituendo in (5) µ(φ), µ(ψ) e b con generici valori x, y, z ∈ [0, 1], troviamo la condizione nota in
letteratura come residuazione:
x∗z ≤y
se e solo se
z ≤ x ⇒∗ y .
(8)
Si osservi che l’esistenza del massimo nell’equazione (6) non è affatto garantita in genere. Il seguente
teorema ci dice esattamente per quali t-norme ∗ è possibile definire il residuo ⇒∗ come nell’equazione
(7).
Teorema 3. Condizione necessaria e sufficiente affinchè una t-norma ∗ sia residuata, vale a dire, che
esista l’operatore
x ⇒∗ y = max{z ∈ [0, 1] | x ∗ z ≤ y} ,
(9)
è che ∗ sia continua da sinistra.
Quando una t-norma ∗ è residuata diciamo anche che l’implicazione è ottenuta dalla congiunzione tramite
residuazione.
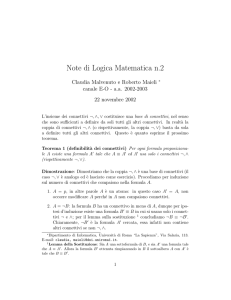
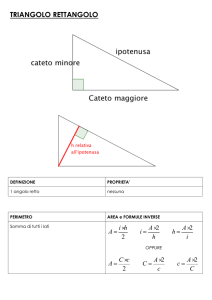
Esempio 4. Ecco i residui associati alle t-norme continue da sinistra dell’Esempio 2. Dato che essi costituiscono l’interpretazione del connettivo di implicazione, con un leggero abuso di linguaggio li chiamiamo
direttamente implicazioni. Si veda anche la Figura 2.
• Implicazione di Gödel:
{
x →∧ y =
• Implicazione del prodotto:
{
x →· y =
1
y
1
y/x
7
if x ≤ y
altrimenti
if x ≤ y
altrimenti
• Implicazione di Lukasiewicz:
{
1
1−x+y
x →⊙ y =
if x ≤ y
altrimenti
= min{1, 1 − x + y}
• Implicazione del minimo nilpotente:
{
x →N M y =
if x ≤ y
altrimenti
1
max{1 − x, y}
Dal Teorema 3 segue immediatemente che la t-norma prodotto drastico non ha residuo associato. Si noti
anche che l’unica funzione continua fra quelle elencate è l’implicazione di Lukasiewicz.
Un utile esercizio consiste nel calcolare i residui elencati sopra a partire dalla t-norma associata e
dall’equazione (9).
1.0
1.0
0.5
1.0
0.5
0.0
1.0
0.0
1.0
0.5
0.0
1.0
0.5
0.0
0.0
0.5
0.0
1.0
0.5
0.0
1.0
0.5
0.0
0.0
0.5
0.0
0.0
0.5
1.0
0.0
0.5
1.0
(a) x →∧ y.
0.5
0.5
1.0
(b) x →· y.
(c) x →⊙ y.
1.0
(d) x →N M y.
Figura 2: I grafici dei residui riportati in Esempio 4.
Il seguente Lemma elenca alcune proprietà significative del residuo ⇒∗ di una t-norma ∗.
Lemma 5. Per ogni x, y, x′ , y ′ ∈ [0, 1]:
1. Se x ≤ y allora x ⇒∗ y = 1;
2. Se x ≤ x′ allora x ⇒∗ y ≥ x′ ⇒∗ y;
3. Se y ≤ y ′ allora x ⇒∗ y ≤ x ⇒∗ y ′ ;
4. x ⇒∗ 1 = 1;
5. x ⇒∗ x = 1;
6. 1 ⇒∗ x = x.
Dimostrazione: Facili esercizi di verifica, usando la definizione di residuo e le proprietà delle t-norme.
8
La negazione
Abbiamo visto che la scelta di una t-norma ∗ continua da sinistra determina la semantica del connettivo
di congiunzione forte, interpretato dalla t-norma stessa, e del connettivo di implicazione, interpretato
dal residuo ⇒∗ di ∗. Anche la semantica del connettivo di negazione è fissata dalla scelta di ∗, infatti
definiamo la negazione come pseudocomplemento (rispetto a 0).
¬∗ x = x ⇒∗ 0 .
Dunque, da (9), ¬∗ x = max{z ∈ [0, 1] | x ∗ z = 0}.
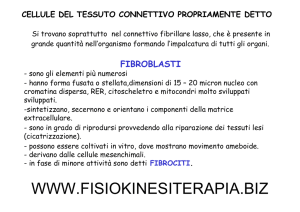
Esempio 6. Ecco le negazioni associate alle t-norme continue da sinistra dell’Esempio 2.
• Negazione di Gödel:
{
¬∧ x =
• Negazione del prodotto:
{
¬· x =
• Negazione di Lukasiewicz:
1
0
se x = 0
altrimenti
1
0
se x = 0
altrimenti
¬⊙ x = 1 − x
• Negazione del minimo nilpotente:
¬N M x = 1 − x
Come si può notare le negazioni associate alla t-norma di Gödel e alla t-norma prodotto coincidono,
sono la stessa funzione. Anche le negazioni associate alla t-norma di Lukasiewicz e a quella del minimo
nilpotente coincidono. Si veda la Figura 3.
1.0
1.0
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0.0
0.2
0.4
0.6
0.8
1.0
0.0
(a) ¬∧ x = ¬· x.
0.2
0.4
0.6
0.8
1.0
(b) ¬⊙ x = ¬N M x.
Figura 3: I grafici delle negazioni riportate in Esempio 6.
9
Consigli pratici
Il grafico della negazione ¬∗ associata a una t-norma ∗ si può ricavare facilmente dal grafico della t-norma
∗ stessa. Infatti basta considerare il confine superiore dell’insieme {(x, y) ∈ [0, 1]2 | x ∗ y = 0}. Questo
segue immediatamente dalla definizione: per ogni x ∈ [0, 1], ¬∗ x = max{y ∈ [0, 1] | x ∗ y = 0}. Come
applicazione di questo metodo si confrontino le figure 1.a e 3.a, e le figure 1.c e 3.b.
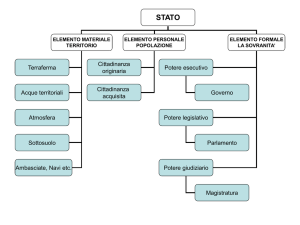
Una tecnica analoga può essere applicata anche per determinare il comportamento dell’implicazione. In
particolare il grafico di ogni funzione della forma fy0 (x) = x ⇒∗ y0 , per ogni y0 ∈ [0, 1], si ottiene come
confine superiore dell’insieme {(x, y) ∈ [0, 1]2 | x ∗ y ≤ y0 }. Il grafico dell’implicazione è costituito dalla
famiglia infinita di funzioni fy0 al variare di y0 in [0, 1]. Ecco in Figura 4 alcuni grafici di questo tipo.
1.0
0.5
1.0
1.0
1.0
0.8
0.8
0.8
0.6
0.6
0.6
0.4
0.4
0.4
0.2
0.2
0.2
0.0
1.0
0.5
0.0
0.0
0.5
0.0
0.2
0.4
0.6
0.8
1.0
0.0
(a) x →∧ 1/4.
0.2
0.4
0.6
0.8
1.0
0.0
(b) x →∧ 1/2.
0.2
0.4
0.6
0.8
1.0
1.0
(c) x →∧ 3/4.
(d) x →∧ y.
1.0
0.5
1.0
1.0
1.0
0.8
0.8
0.8
0.6
0.6
0.6
0.4
0.4
0.4
0.2
0.2
0.2
0.0
1.0
0.5
0.0
0.0
0.5
0.0
0.2
0.4
0.6
0.8
(e) x →⊙ 1/4.
1.0
0.0
0.2
0.4
0.6
0.8
1.0
0.0
(f) x →⊙ 1/2.
0.2
0.4
0.6
0.8
1.0
(g) x →⊙ 3/4.
1.0
(h) x →⊙ y.
Figura 4: Grafici di alcune funzioni x ⇒∗ y0 .
Stiamo delineando un quadro semantico per le logiche di cui vogliamo parlare. In particolare abbiamo
deciso che la congiunzione (forte, o monoidale) sarà interpretata da una t-norma continua a sinistra,
l’implicazione dal residuo associato e la negazione dallo pseudocomplemento (rispetto a 0).
In particolare, il linguaggio scelto per queste logiche è
L = {&, →, ⊥} ,
dove & denota la congiunzione forte, → l’implicazione e ⊥ la costante 0.
10
La negazione è dunque un connettivo derivato rispetto a L in quanto ¬φ è pensabile come abbreviazione
di una formula in L, uniformemente rispetto a φ. Vale a dire, per ogni formula φ di L,
¬φ := φ → ⊥ .
Riprenderemo il discorso sulle logiche a valori in [0, 1] basate su L e sui connettivi derivati nella Sezione
Logica basata su una t-norma.
I connettivi reticolari
Data una t-norma continua (la continuità a sinistra per il discorso che segue non è sufficiente) si definiscono altre due operazioni associate ai connettivi di congiunzione e disgiunzione deboli o reticolari,
rispettivamente denotati da ∧ e ∨.
Tali connettivi sono derivati rispetto a L. In particolare, per ogni coppia di formule φ e ψ di L:
φ ∧ ψ := φ & (φ → ψ) .
φ ∨ ψ := ((φ → ψ) → ψ) ∧ ((ψ → φ) → φ) .
Dunque, data una t-norma continua ∗, le operazioni che interpretano i connettivi reticolari sono definite
come segue (dove usiamo gli stessi simboli ∧ e ∨ per denotarle). Per ogni x, y ∈ [0, 1]:
x ∧ y = x ∗ (x ⇒∗ y) ,
x ∨ y = ((x ⇒∗ y) ⇒∗ y) ∧ ((y ⇒∗ x) ⇒∗ x) .
Mostriamo ora che per ogni t-norma continua ∗ le operazioni associate ai connettivi reticolari sono sempre
min e max.
Lemma 7. Per ogni t-norma continua ∗ e per ogni x, y ∈ [0, 1]:
x ∧ y = min{x, y} .
(10)
Dimostrazione: Analizziamo una casistica esaustiva. Se x ≤ y allora
x ∧ y = x ∗ (x ⇒∗ y) = x ∗ 1 = x = min{x, y} .
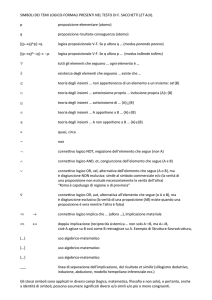
Se x > y, consideriamo la funzione Fx∗ : [0, 1] → [0, 1] definita come
Fx∗ (z) = x ∗ z ,
per ogni z ∈ [0, 1] .
Si noti che (si veda Figura 5):
1. Fx∗ (0) = 0;
2. Fx∗ (1) = x;
3. Fx∗ è una funzione continua su tutto [0, 1].
4. Fx∗ è monotona non decrescente.
Dalle proprietà 1–3 segueche esiste z ∗ ∈ [0, 1] tale che Fx∗ (z ∗ ) = y, vale a dire x ∗ z ∗ = y. Dunque
z ∗ ∈ {z ∈ [0, 1] | x ∗ z ≤ y}. Possiamo concludere che
max{z ∈ [0, 1] | x ∗ z ≤ y} = z ∗∗ ,
11
x
y
z*
0
1
Figura 5: Grafico qualitativo di una funzione avente le 4 proprietà elencate nel Lemma 7.
per qualche z ∗∗ ∈ [0, 1], z ∗∗ ≥ z ∗ , tale che, per la proprietà 4,
x ∗ z ∗∗ = y .
Quindi,
x ∗ (x ⇒ y) = x ∗ max{z ∈ [0, 1] | x ∗ z ≤ y} = x ∗ z ∗∗ = y = min{x, y} .
Dato che non ci sono altri casi, l’equazione (10) è valida.
Lemma 8. Per ogni t-norma continua ∗ e per ogni x, y ∈ [0, 1]:
x ∨ y = max{x, y} .
(11)
Dimostrazione: Procediamo per casi: Se x ≤ y allora x ⇒∗ y = 1 e dunque
x ∨ y = (1 ⇒∗ y) ∧ ((y ⇒∗ x) ⇒∗ x) = y ∧ ((y ⇒∗ x) ⇒∗ x) .
Dato che stiamo supponendo x ≤ y dobbiamo mostrare che x ∨ y = y, per cui ci basta provare che
(y ⇒∗ x) ⇒∗ x ≥ y .
(12)
Ora notiamo che per il Lemma 7, abbiamo che
y ∗ (y ⇒∗ x) = min{x, y} = x ,
dunque
y ∈ {z ∈ [0, 1] | (y ⇒∗ x) ∗ z ≤ x} ,
e quindi
y ≤ max{z ∈ [0, 1] | (y ⇒∗ x) ∗ z ≤ x} = (y ⇒∗ x) ⇒∗ x .
Abbiamo provato la disequazione (12) e dunque se x ≤ y allora x ∨ y = max{x, y}. Per quanto riguarda
l’altro caso x > y, grazie alla simmetria della formula che definisce x ∨ y, e alla commutatività dell’operazione min, scambiando x con y ci riconduciamo al caso precedente. Abbiamo provato la validità
dell’equazione (11).
Lemma 7 e Lemma 8 mostrano che per ogni assegnamento µ : V ar → [0, 1] e per ogni coppia di formule
φ, ψ vale che:
µ(φ ∧ ψ) = min{µ(φ), µ(ψ)} ,
µ(φ ∨ ψ) = max{µ(φ), µ(ψ)} .
12
Logica basata su una t-norma
Ogni t-norma continua ∗ : [0, 1]2 → [0, 1] determina semanticamente un’unica logica (proposizionale)
polivalente L∗ , il cui insieme di valori di verità è l’intervallo reale unitario [0, 1], nel modo di seguito
descritto.
Definizione 9. Sia ∗ : [0, 1]2 → [0, 1] una t-norma continua, e sia ⇒∗ : [0, 1]2 → [0, 1] il residuo di ∗.
Allora:
1. Il linguaggio di L∗ è in prima istanza {&, →, ∧, ∨, ¬, ⊥, ⊤}: come adesso vedremo, alcuni connettivi
saranno definibili a partire da altri, per cui, eliminando i connettivi definibili, il linguaggio di L∗ è
per definizione {&, →, ⊥}.
2. Dato un assegnamento µ : V ar → [0, 1], la sua estensione canonica alle formule del linguaggio di L∗
è definita come segue:
• µ(φ&ψ) = µ(φ) ∗ µ(ψ);
• µ(φ → ψ) = µ(φ) ⇒∗ µ(ψ);
• µ(⊥) = 0.
3. Si definiscono i seguenti connettivi derivati:
• ¬φ = φ → ⊥;
• ⊤ = ¬⊥;
• φ ∧ ψ = φ&(φ → ψ);
• φ ∨ ψ = ((φ → ψ) → ψ) ∧ ((ψ → φ) → φ).
4. Una formula φ è una tautologia di L∗ (o L∗ -tautologia, in simboli |=L∗ φ) se e solo se per ogni
assegnamento µ : V ar → [0, 1] vale che
µ(φ) = 1 .
5. Una formula φ è una conseguenza logica (o L∗ -conseguenza), di un insieme di formule Γ in L∗ (in
simboli Γ |=L∗ φ) se e solo se per ogni assegnamento µ : V ar → [0, 1] tale che µ(γ) = 1 per ogni
γ ∈ Γ, si ha che µ(φ) = 1.
6. Una formula φ è 1-soddisfacibile in L∗ (o L∗ -1-soddisfacibile), se e solo se esiste un assegnamento
µ : V ar → [0, 1] tale che µ(φ) = 1.
7. Una formula φ è debolemente soddisfacibile in L∗ (o L∗ -debolemente soddisfacibile), se e solo se
esiste un assegnamento µ : V ar → [0, 1] tale che µ(φ) > 0.
Si ha immediatemente la seguente proposizione:
Proposizione 10. Sia ∗ una t-norma continua. Per L∗ vale la forma sfumata del modus ponens (1).
In particolare, quando µ(φ) = µ(φ → ψ) = 1 e assumiamo che le nostre stime siano precise (in (1) si ha
che a = b = 1), allora anche c = µ(ψ) = 1, dunque la regola di inferenza classica del modus ponens
φ
φ→ψ
ψ
è corretta, vale a dire: se le premesse sono tautologie, anche la conclusione lo è.
13
Questo fatto ci fornisce un ingrediente importante che sfrutteremo per assiomatizzare una logica del tipo
L∗ . Mostreremo infatti che per alcune di queste logiche è possibile costruire un’insieme di tautologie,
chiamati assiomi, e una nozione di prova, che a partire dagli assiomi e dalla regola di inferenza del modus
ponens, produce algoritmicamente tutte e sole le tautologie delle logiche in oggetto.
Per quanto concerne i connettivi derivati, è un facile esercizio dimostrare le seguenti identità.
Proposizione 11. Sia ∗ una t-norma continua. Per ogni assegnamento µ : V ar → [0, 1] e ogni coppia
di formule φ, ψ:
• µ(¬φ) = µ(φ) ⇒∗ 0;
• µ(⊤) = 1;
• µ(φ ∧ ψ) = min{µ(φ), µ(ψ)};
• µ(φ ∨ ψ) = max{µ(φ), µ(ψ)}.
Si noti che ∗ determina ⇒∗ , nel senso che per ogni scelta possibile della t-norma continua ∗, esiste ed è
unico il residuo ad essa associato ⇒∗ , ma ciò non implica che ⇒∗ sia derivabile da ∗, vale a dire, in genere
non esiste alcuna formula θ(φ, ψ) nel linguaggio {&, ⊥} tale che µ(θ(φ, ψ)) = µ(φ) ⇒∗ µ(ψ). D’altro
canto, i connettivi ¬, ⊤, ∧, ∨ sono derivabili proprio in questo senso, come afferma la Proposizione 11.
Identificando una logica con l’insieme delle sue tautologie, introduciamo la nozione seguente:
Definizione 12. Sia K un insieme di t-norme continue da sinistra. La Logica LK determinata da K ha
come tautologie tutte e sole le formule che sono tautologie di L∗ per ogni ∗ ∈ K.
Siamo pronti a definire, a livello semantico, la Basic Logic di Hájek.
Definizione 13. La Basic Logic BL è la logica basata sul linguaggio {&, →, ⊥} di tutte le t-norme
continue (e loro residui), nel senso seguente:
• Diciamo che una formula φ è una tautologia di BL (o BL-tautologia) se e solo se φ è una L∗ -tautologia
per ogni t-norma continua ∗.
Vale a dire: BL = LK , per K = {∗ | ∗ t-norma continua}.
Le nozioni di BL-conseguenza logica e di BL-soddisfacibilità si ricavano adattando in modo ovvio le
corrispondenti nozioni definite per una logica L∗ nella Definizione 9.
Abbiamo visto, in una sezione precedente, che il requisito minimo per l’esistenza del residuo di una tnorma non è la continuità della t-norma stessa, ma la più debole condizione di continuità da sinistra (cfr.
Teorema 3). Si può quindi generalizzare, con qualche accorgimento, la definizione di logica basata su una
t-norma, estendendola al caso delle t-norme continue da sinistra, ma non necessariamente continue.
La modifica più rilevante che dobbiamo apportare alla Definizione 9 è che nel caso di t-norme continue
a sinistra, il Lemma 7 non vale più. (Esercizio: dove, nella prova del Lemma, si usa la continuità della
t-norma?) In effetti, vale una versione indebolita del Lemma 7.
Lemma 14. Se ∗ è una t-norma continua da sinistra allora
x ∗ (x ⇒∗ y) ≤ min{x, y}
per ogni (x, y) ∈ [0, 1]2 .
14
Dimostrazione. Lasciata per esercizio. Suggerimento: cosa succede ad assumere che la funzione Fx
definita nella dimostrazione del Lemma 7 sia continua solo da sinistra?
Grazie al Lemma 14, il Lemma 8 continua a valere. (Esercizio: perché?)
Esempio 15. Verificare per esercizio che
x ∗N M (x →N M y) ̸= min{x, y} ,
e che
x ∗N M (x →N M y) ≤ min{x, y} .
Il seguente Lemma mostra che l’identità del Lemma 7 vale se e solo se la t-norma ∗ è continua.
Lemma 16. Se ∗ è una t-norma continua da sinistra, ma non continua, allora esistono x0 , y0 ∈ [0, 1]
tali che
x0 ∗ (x0 ⇒∗ y0 ) ̸= min{x0 , y0 } .
Dimostrazione. Lasciata per esercizio. Suggerimento: si usi il seguente risultato dell’analisi: sia f : [0, 1]2 →
[0, 1] una funzione non-decrescente. Allora f è continua su [0, 1]2 se e solo se per ogni a ∈ [0, 1] le funzioni
f (a, y) : [0, 1] → [0, 1] e f (x, a) : [0, 1] → [0, 1] sono continue su [0, 1].
Dato che il Lemma 7 non vale in genere per t-norme continue da sinistra, dobbiamo includere nel
linguaggio il connettivo ∧, che non risulta più derivabile da {&, →, ⊥}, e fissarne la semantica.
Definizione 17. Sia ∗ : [0, 1]2 → [0, 1] una t-norma continua da sinistra, e sia ⇒∗ : [0, 1]2 → [0, 1] il
residuo di ∗. Allora:
1. Il linguaggio di L∗ è {&, ∧, →, ⊥}.
2. Dato un assegnamento µ : V ar → [0, 1], la sua estensione canonica alle formule del linguaggio di L∗
è definita come al punto 2. della Definizione 9, inoltre:
• µ(φ ∧ ψ) = min{µ(φ), µ(ψ)}.
3. I connettivi derivati ¬, ⊤, ∨ sono definiti come al punto 3. della Definizione 9.
4. Si applicano i rimanenti punti 4.–7. della Definizione 9.
Con questa definizione vale la seguente affermazione.
Proposizione 18. Le Proposizioni 10 e 11 valgono anche quando ∗ è una t-norma continua solo da
sinistra.
Analogamente a quanto fatto per le t-norme continue, introduciamo a livello semantico la logica MTL
(Monoidal t-norm-based logic, introdotta da Esteva e Godo) di tutte le t-norme continue da sinistra (e
loro residui).
Definizione 19. La logica MTL è la logica basata sul linguaggio {&, ∧, →, ⊥} di tutte le t-norme continue
da sinistra (e loro residui), nel senso seguente:
• Diciamo che una formula φ è una tautologia di MTL (o MTL-tautologia) se e solo se φ è una
L∗ -tautologia per ogni t-norma continua da sinistra ∗.
15
Vale a dire: MTL = LK , per K = {∗ | ∗ t-norma continua da sinistra}.
Le nozioni di MTL-conseguenza logica e di MTL-soddisfacibilità si ricavano adattando in modo ovvio le
corrispondenti nozioni definite per una logica L∗ nella Definizione 17.
Si osservi che ovviamente, se φ è una MTL-tautologia allora è anche una BL-tautologia, mentre il viceversa
fallisce. In particolare, si può ottenere BL come estensione schematica di MTL, ovvero specificando
assiomi aggiuntivi che sono BL-tautologie ma non MTL-tautologie. Specificatamente basta aggiungere
un unico schema di assiomi, che codifica il fatto che ∧ in BL è definibile da {&, →, ⊥}:
Introduciamo lo schema di assiomi di divisibilità DIV. Per ogni coppia di formule (φ, ψ):
• DIV:
(φ ∧ ψ) → (φ&(φ → ψ)).
Vale il seguente lemma.
Lemma 20. Una t-norma ∗ continua da sinistra è tale che DIV è una L∗ -tautologia per ogni coppia
(φ, ψ) se e solo se ∗ è continua.
Dimostrazione. Sia µ un assegnamento e si ponga x = µ(φ) e y = µ(ψ). Abbiamo detto che per ogni
t-norma ∗ continua da sinistra e ogni (x, y) ∈ [0, 1]2 vale che x ∗ (x ⇒∗ y) ≤ min{x, y}. D’altro canto DIV
afferma che min{x, y} ⇒∗ (x ∗ (x ⇒∗ y)) = 1, che vale se e solo se min{x, y} ≤ (x ∗ (x ⇒∗ y)). Dunque
min{x, y} = (x ∗ (x ⇒∗ y)), proprietà che, per la dimostrazione del Lemma 7 e i Lemmi 14 e 16, vale per
∗ se e solo se ∗ stessa è continua.
Indichiamo il fatto stabilito dal Lemma 20 con:
BL = MTL + DIV .
Analogamente, possiamo descrivere altre logiche nella gerarchia di BL e MTL come estensioni schematiche
di queste ultime, trovando assiomi che forzino le t-norme ad avere specifiche proprietà.
Ad esempio, si può facilmente mostrare che l’unica t-norma ∗ idempotente (cioè, tale che x ∗ x = x per
ogni x ∈ [0, 1]) è la t-norma di Gödel.
Definiamo lo schema di assiomi di idempotenza IDEM. Per ogni formula φ:
• IDEM:
φ → (φ&φ).
Lemma 21. L’unica t-norma ∗ tale che IDEM è una L∗ -tautologia per ogni formula φ è la t-norma di
Gödel (x, y) 7→ min{x, y}. Usando la notazione precedentemente introdotta:
G = MTL + IDEM .
Dimostrazione. Sia ∗ una t-norma tale che IDEM è una L∗ -tautologia per ogni φ. Allora ∗ è idempotente,
e dunque x ∗ x = x per ogni x ∈ [0, 1]. Si ricordi ora che x ∗ 1 = x per ogni x ∈ [0, 1]. Per la proprietà
di monotonia delle t-norme, per ogni x e ogni y ∈ [x, 1], vale che x = x ∗ x ≤ x ∗ y ≤ x ∗ 1 = x, dunque
x ∗ y = x per ogni y ≥ x, il che equivale a dire che x ∗ y = min{x, y}.
Ovviamente vale anche G = BL + IDEM.
La dimostrazione del Lemma 21 mostra anche che la t-norma di Gödel è quella i cui valori, punto per
punto sono massimi rispetto a tutte le altre t-norme. La t-norma con i valori minimi punto a punto è la
16
t-norma del prodotto drastico: per ogni t-norma ∗ (scelta senza restrizioni sulle proprietà di continuità)
e per ogni (x, y) ∈ [0, 1]2 :
x ∗P D y ≤ x ∗ y ≤ x ∧ y .
La logica di Lukasiewicz possiede una definizione analoga a quella data nel Lemma 21 per la logica di
Gödel, sebbene la proprietà che dobbiamo considerare non valga solo per la t-norma di Lukasiewicz.
La proprietà da analizzare è la legge della doppia negazione: per ogni x ∈ [0, 1] vale che:
¬⊙ ¬⊙ x = x .
(Verificarlo per esercizio).
Definiamo lo schema di assiomi di involutività (della negazione) INV. Per ogni formula φ:
• INV:
¬¬φ → φ.
Lemma 22. Se una t-norma continua ∗ è tale che INV è una L∗ -tautologia per ogni formula φ allora
una formula ψ è una L∗ -tautologia se e solo se ψ è una tautologia della logica L⊙ basata sulla t-norma
di Lukasiewicz. Dunque,
L = BL + INV .
Omettiamo la prova del Lemma precedente. Si osservi che non si afferma che la t-norma di Lukasiewicz
sia l’unica t-norma continua ∗ per cui ¬∗ ¬∗ x = x. Ciò che si afferma è che la logica determinata da
ogni siffatta t-norma è la stessa, vale a dire, definisce lo stesso insieme di tautologie. In termini algebrici
ciò discende dal fatto che la struttura ([0, 1], ⊙, →⊙ , 0) è isomorfa alla struttura ([0, 1], ∗, →∗ , 0) per ogni
t-norma continua involutiva ∗.
Elenchiamo ora, senza dimostrazione la caratterizzazione come estensioni schematiche di BL o MTL delle
altre logiche basate su t-norme che abbiamo considerato.
La logica della t-norma prodotto si ottiene da BL tramite l’assioma di cancellatività CANC. Per ogni
coppia di formule (φ, ψ):
• CANC:
¬φ ∨ ((φ → (φ&ψ)) → ψ).
Lemma 23. Se una t-norma continua ∗ è tale che CANC è una L∗ -tautologia per ogni coppia (φ, ψ)
allora una formula ψ è una L∗ -tautologia se e solo se ψ è una tautologia della logica L· basata sulla
t-norma del prodotto. Dunque,
Π = BL + CANC .
La logica della t-norma del minimo nilpotente si ottiene da MTL tramite due schemi di assiomi: INV e
l’assioma debole del minimo nilpotente WNM. Per ogni coppia di formule (φ, ψ):
• WNM:
¬(φ&ψ) ∨ ((φ ∧ ψ) → (φ&ψ)).
Lemma 24. Se una t-norma continua da sinistra ∗ è tale che sia WNM che INV sono L∗ -tautologie per
ogni coppia (φ, ψ)allora una formula ψ è una L∗ -tautologia se e solo se ψ è una tautologia della logica
L∗N M basata sulla t-norma del minimo nilpotente. Dunque,
NM = MTL + WNM + INV .
Cosa succede se richiediamo che per una t-norma continua da sinistra valgano sia IDEM che INV?
17
Lemma 25. Non esiste alcuna t-norma continua da sinistra ∗ tale che sia IDEM che INV sono L∗ tautologie.
Dimostrazione. Per il Lemma 21, l’affermazione segue immediatamente dall’osservazione seguente. Se
x ∈ [0, 1] è tale che ¬∧ ¬∧ x = x allora x ∈ {0, 1}.
Come possiamo caratterizzare la logica data da MTL + IDEM + INV? Il Lemma 25 mostra che senz’altro
non è la logica di una t-norma, ma d’altro canto (a meno che non sia la logica inconsistente in cui tutte
le affermazioni sono vere), è una logica nella gerarchia delle estensioni schematiche di MTL. Riusciamo
a caratterizzarla se restringiamo l’insieme dei valori di verità ammessi: da [0, 1] torniamo a considerare
l’insieme classico {0, 1}.
Lemma 26. La logica L più debole2 nel linguaggio {&, ∧, →, ⊥} in cui tutte le MTL-tautologie sono
L-tautologie, ed in cui sia IDEM che INV sono L-tautologie per ogni coppia (φ, ψ), è la logica Booleana.
Dunque,
B = MTL + IDEM + INV .
Dimostrazione. Anche quest’affermazione segue immediatamente dall’osservazione nella dimostrazione
del Lemma 25.
Si osservi che anche BL + IDEM + INV è la logica Booleana.
Abbiamo visto che due delle più celebrate leggi della logica classica, l’idempotenza della congiunzione, e
la legge della doppia negazione, non valgono in genere nelle logiche basate su t-norme e loro estensioni.
Abbiamo altresı̀ verificato che se le richiediamo entrambe, riotteniamo la logica classica.
C’e’ un’altra celebrata legge classica che non vale nelle logiche della gerarchia di MTL diverse dalla logica
classica:
L’assioma del terzo escluso: EXM. Per ogni formula φ:
• EXM:
φ ∨ ¬φ.
Lemma 27. La logica L più debole nel linguaggio {&, ∧, →, ⊥} in cui tutte le MTL-tautologie sono
L-tautologie, ed in cui EXM è una L-tautologia per ogni φ, è la logica Booleana.
Dimostrazione. Sia ∗ : [0, 1]2 → [0, 1] una t-norma continua da sinistra. Si noti che max{x, x ⇒∗ 0} = 1
se e solo se x = 1 o x ⇒∗ 0 = 1. Per definizione x ⇒∗ 0 = max{z ∈ [0, 1] | x ∗ z = 0}. Per z = 1 vale
x ∗ z = 0 se e e solo x = 0, dunque max{x, x ⇒∗ 0} = 1 se e solo se x = 0 o x = 1.
Se invece si estende MTL o BL con un’altra celebrata legge classica, si ottengono logiche più deboli della
logica classica.
L’assioma di non contraddizione: NC: Per ogni formula φ:
• NC:
¬(φ ∧ ¬φ).
Definiamo:
• SMTL = MTL + NC.
• SBL = BL + NC.
che una logica L è più debole di una logica L′ , se ogni L-tautologia è anche una L′ -tautologia. Nell’ambito
che stiamo studiando la logica più debole di tutte è MTL, e ogni logica basata su una t-norma continua è più forte di BL.
2 Diciamo
18
Si può verificare che sia SMTL che SBL sono estensioni di MTL che non collassano nella logica classica.
Più precisamente SBL è più forte di SMTL, mentre sia G che Π sono più forti di SBL.
Il diagramma seguente riporta (alcuni fra) i rapporti di forza tra (alcune del)le estensioni schematiche di
MTL.
IDEM
Bf
z= O X22aCCC
z
22 CC
z
zz
22 CC
z
22 CCC
zz
z
z
22 CCC
z
z
CC
z
22
C
INV zz
2
z
IDEM
o
INV
22 IDEM CCC
z
z
CC
z
22
CC
zz
z
2
CC
22
zz
CC
z
z
2
CC
z
22
z
CC
z
22
C
zz
2
L
G
EOY
=z ΠO
IDEM 22
F
2
z
22
zz
22
zz
z
22
zz
zz
22 z
z
22 CANC zz
2
z
IDEM
z
22
zz
z
22
zz
22
zz
z
22
z
z
22
zz
z
z
INV CANC
NM
SBL
O aDD
O
DD
DD
DD
IDEM
DD
DD
DD
DD
DD
DIV
INV
NC DD
DD
DD
DD
DD
DD
D SMTL
BL
WNM
O
=
aDD
{{
DD
{
DD
{{
DD
{{
{
DD
{{
DD
{{
DD
{
DD
WNM {{
{
DD
DIV
{{
NC DD
{
{
DD
{
DD
{{
DD
{
{{
DD
DD
{{
{
D
{{
MTL
19
EXM
Assiomatizzazioni
Nella sezione precedente abbiamo introdotto la definizione semantica di logica basata su una t-norma.
In questa sezione accenneremo alla controparte sintattico-assiomatica di questo concetto. In particolare
forniremo un concetto di prova di una formula in un sistema assiomatico e enunceremo la definizione di
un sistema assiomatico corretto e completo per BL: vale a dire, le formule provate in questo sistema sono
tutte e sole le BL-tautologie. Faremo poi lo stesso per MTL.
Definizione 28. Un sistema assiomatico con il modus ponens come unica regola di inferenza è costituito
da un insieme di formule presentate come l’insieme di tutte le istanze di un insieme di schemi di assiomi
Ax.
Una prova nel sistema determinato da Ax è una sequenza finita di formule φ1 , . . . , φu tale che, per ogni
i ∈ {1, 2, . . . , u}, vale almeno una delle seguenti condizioni:
1. φi è istanza di un assioma in Ax.
2. Esistono due indici j, k < i, tali che φi è ottenuta per modus ponens da φj e φk , vale a dire:
φk = φj → φi .
Ogni formula φ che appare in una prova è dunque provata e si dice teorema del sistema basato su Ax. In
simboli:
⊢Ax φ .
Una definizione analoga fornisce il concetto di prova in un sistema assiomatico di una formula da una
teoria.
Definizione 29. Sia Ax un sistema assiomatico come definito in 28, e sia Γ un insieme di formule. Allora
una sequenza di formule φ1 , . . . , φu è una prova in Ax dalla teoria Γ se per ogni i ∈ {1, 2, . . . , u}, vale
almeno una delle seguenti condizioni:
1. φi è istanza di un assioma in Ax.
2. φ ∈ Γ.
3. Esistono due indici j, k < i, tali che φi è ottenuta per modus ponens da φj e φk , vale a dire:
φk = φj → φi .
Se φ appare in una prova da Γ scriviamo Γ ⊢Ax φ.
Compito precipuo della logica è trovare e provare la stretta aderenza tra sistemi assiomatici e loro controparte semantica. Nell’ambito del nostro quadro concettuale, questo compito si riduce a trovare, per
ogni logica L nella gerarchia MTL, un sistema assiomatico A(L) tale che
• A(L) sia corretto rispetto a L, vale a dire che per ogni formula φ:
⊢A(L) φ
=⇒ |=L φ .
• A(L) sia completo rispetto a L, vale a dire che per ogni formula φ:
|=L φ
=⇒ ⊢A(L) φ .
20
Dunque, la correttezza garantisce che il sistema A(L) non prova alcuna formula che non sia una tautologia
di L, viceversa la completezza garantisce che tutte le L-tautologie siano provabili in A(L). In genere, la
correttezza è facile da provare, mentre dimostrare la completezza può essere molto arduo.
L’analoga nozione Γ ⊢A(L) φ ⇐⇒ Γ |=L φ è nota come completezza forte.
Riportiamo qui di seguito due sistemi assiomatici corretti e completi rispettivamente per BL e MTL.
Definizione 30. Il sistema assiomatico A(BL) di Hájek per BL:
(A1) (φ → ψ) → ((ψ → ϑ) → (φ → ϑ))
(A2) (φ&ψ) → φ
(A3) (φ&ψ) → (ψ&φ)
(A4) (φ&(φ → ψ)) → (ψ&(ψ → φ))
(A5a) (φ → (ψ → ϑ) → ((φ&ψ) → ϑ)
(A5b) ((φ&ψ) → ϑ) → (φ → (ψ → ϑ))
(A6) ((φ → ψ) → ϑ) → (((ψ → φ) → ϑ) → ϑ)
(A7) ⊥ → φ
Teorema 31.
⊢A(BL) φ
⇐⇒
|=BL φ .
Definizione 32. Il sistema assiomatico A(MTL) di Esteva e Godo per MTL:
(B1) (φ → ψ) → ((ψ → ϑ) → (φ → ϑ))
(B2) (φ&ψ) → φ
(B3) (φ&ψ) → (ψ&φ)
(B4) (φ ∧ ψ) → φ
(B5) (φ ∧ ψ) → (ψ ∧ φ)
(B6) (φ&(φ → ψ)) → (φ ∧ ψ)
(B7a) (φ → (ψ → ϑ) → ((φ&ψ) → ϑ)
(B7b) ((φ&ψ) → ϑ) → (φ → (ψ → ϑ))
(B8) ((φ → ψ) → ϑ) → (((ψ → φ) → ϑ) → ϑ)
(B9) ⊥ → φ
Teorema 33.
⊢A(MTL) φ
⇐⇒
|=MTL φ .
Si noti che per il teorema 20, anche il sistema {B1, . . . , B9} ∪ {DIV} è corretto e completo per BL. Allo
stesso modo, per esempio, {A1, . . . , A7} ∪ {INV} fornisce un’assiomatizzazione corretta e completa per
la logica basata sulla t-norma di Lukasiewicz, anche se ne vedremo presto una molto più concisa.
1
Disgiunzioni forti e t-conorme
Nel nostro quadro concettuale c’è un concetto che brilla per la sua assenza: se nel nostro linguaggio
ammettiamo due connettivi, forte e debole, per la congiunzione, perché abbiamo un solo connettivo per
la disgiunzione (ed è quello debole)? La risposta esauriente trascende gli scopi di questo corso: ci basti dire
che i sistemi che contemplano entrambe le coppie di connettivi sono considerevolmente più complessi da
studiare di quelli considerati finora, e di fatto, ne manca ancora una sistematizzazione sufficientemente
sviluppata. Possiamo però, sulla falsariga di quanto fatto per gli altri connettivi, fornire requisiti di
ragionevolezza sufficienti a inquadrare la classe di operatori candidati a giocare il ruolo di disgiunzione
forte rispetto a una data congiunzione forte.
21
Definizione 34. Una t-conorma è un operatore
+ : [0, 1]2 → [0, 1]
tale che, per ogni x, y, z, y1 , y2 ∈ [0, 1] valgono le seguenti proprietà:
• (Associatività): x + (y + z) = (x + y) + z;
• (Commutatività): x + y = y + x;
• (Monotonia non-decrescente): Se y1 ≤ y2 allora x + y1 ≤ x + y2 ;
• (Elemento assorbente): x + 1 = 1;
• (Elemento neutro): x + 0 = x.
Dovrebbero essere abbastanza ovvi i motivi per cui il concetto di t-conorma risulta duale a quello di
t-norma. In particolare ad ogni t-norma si associa canonicamente una specifica t-conorma, e viceversa,
nel modo seguente.
Definizione 35. La t-conorma associata a una t-norma ∗ è definita come:
x +∗ y = 1 − ((1 − x) ∗ (1 − y)) .
Analogamente, la t-norma associata a una t-conorma + è definita come:
x ∗+ y = 1 − ((1 − x) + (1 − y)) .
In genere non è possibile definire la t-conorma associata a una t-norma ∗ tramite le operazioni associate
in L∗ ai connettivi del linguaggio {&, →, ⊥}, vale a dire, non è possibile definire in genere un connettivo
derivato la cui interpretazione in L∗ sia la t-conorma +∗ . Ad esempio, la t-conorma del prodotto è
l’operatore:
(x, y) 7→ 1 − ((1 − x)(1 − y)) = x + y − xy .
Si può verificare che tale funzione non può essere costruita a partire dalle funzioni ·, →. e dalla funzione
costante 0.
Alcune t-norme però permettono di definire la t-conorma associata come interpretazione di un connettivo
derivato, come ad esempio le t-norme di Gödel e di Lukasiewicz.
La t-conorma di Gödel è l’operatore:
(x, y) 7→ 1 − min{1 − x, 1 − y} = max{x, y} ,
e dunque la t-conorma nella logica di Gödel è l’interpretazione del connettivo derivato ∨.
La t-conorma di Lukasiewicz è l’operatore:
(x, y) 7→ 1 − ((1 − x) ⊙ (1 − y)) = 1 − max{0, 1 − x + 1 − y − 1} = min{1, x + y}, .
Dunque la t-conorma nella logica di Lukasiewicz è la somma troncata a 1. Un modo di definire tale
somma troncata è il seguente:
• φ ⊕ ψ = ¬(¬φ&¬ψ).
È un facile esercizio verificare che µ(φ ⊕ ψ) = min{1, µ(φ) + µ(ψ)} per ogni assegnamento µ e ogni coppia
di formule (φ, ψ). È altrettanto facile verificare che per ogni t-norma ∗ tale che INV è una L∗ -tautologia,
l’interpretazione di φ ⊕ ψ è la t-conorma associata a ∗.
22