01CXGBN – Trasmissione numerica
parte 6:
calcolo delle probabilità I
1
Probabilità di errore – BER e SER
Per rappresentare la bontà di un sistema di trasmissione
numerica in termini di probabilità di errore useremo i
seguenti parametri:
SYMBOL ERROR RATE = SER = Ps(e) =
Probabilità che il generico segnale trasmesso sT sia ricevuto
errato
PS(e) = P( sR ≠ sT )
BIT ERROR RATE = BER = Pb(e) =
Probabilita’ che il generico bit trasmesso uT sia ricevuto errato
Pb(e) = P( uR ≠ uT )
2
Probabilità di errore
Grandezze di interesse
Rb [bit/s]
Data Rate (Bit Rate)
velocità delle sequenze binarie di informazione
Tb = 1/ Rb [s]
Tempo di bit
Durata di un bit di informazione
T = k Tb [s]
Tempo di simbolo (segnale)
Durata di un simbolo (segnale) della costellazione
R = 1/T [ simboli/s] [baud]
Symbol Rate (Baud Rate)
velocità delle sequenze di simboli (segnali) trasmessi
3
Probabilità di errore
Grandezze di interesse
Eb
Energia per bit di informazione
Energia media spesa per trasmettere un bit di informazione
ES
Energia di segnale (energia media della costellazione)
Energia media spesa per trasmettere un segnale della costellazione
S = Eb Rb = ES R [W] [dBm]
Potenza del segnale
Potenza media del segnale trasmesso sul canale
4
Probabilità di errore
Grandezze di interesse
N0
Densità spettrale di rumore
B [Hz]
Banda
Banda occupata dal segnale trasmesso
N = N0 B
Potenza del rumore
Potenza di rumore che cade nella banda occupata dal segnale trasmesso
5
Probabilità di errore
Grandezze di interesse
S/N
Rapporto segnale/disturbo
Rapporto tra le potenze di segnale e di rumore
Eb/N0
Rapporto segnale/disturbo riferito al bit di informazione
Legame:
Dove
S Eb Rb Eb
=
=
η
N N0 B N0
Rb
prenderà il nome di
η=
B
efficienza spettrale
6
Probabilità di errore
Le prestazioni in termini di probabilità di errore saranno
calcolate in funzione del rapporto Eb/N0
Questo risulta proporzionale alla potenza del segnale tramite la
bit-rate che è una grandezza fondamentale e ben definita del
sistema di trasmissione numerica
Eb Rb
Eb
S
S= N=
N0 B =
Rb N 0
N
N0 B
N0
7
Catena trasmissiva
uT ∈ Z 2 → vT ∈ H k → sT ∈ M → r ∈ R d → sR ∈ M → vR ∈ H k → uR ∈ Z 2
PS (e) = P( sR ≠ sT )
Pb (e) = P(uR ≠ uT )
Calcolo della probabilità di errore
• sul simbolo Ps(e) (Symbol Error Rate - SER)
• sul bit Pb(e) (Bit Error Rate - BER)
8
Calcolo SER
Definizione:
PS(e) = P( sR ≠ sT )
Il segnale trasmesso appartiene alla costellazione M
{}
sT ∈ M = si
Tutti i segnali sono equiprobabili
1
PS ( sT = si ) =
m
9
Calcolo SER
Per il teorema della probabilità totale:
m
1 m
PS (e) = ∑ PS (e | sT = si )P( sT = si ) = ∑ PS (e | sT = si )
m i =1
i =1
Dobbiamo calcolare:
(
( )
PS (e | sT = si ) = P( sR ≠ sT | sT = si ) = P ρ ∉ V si | sT = si
)
(ricordando il criterio di decisione basato sulle regioni di Voronoi)
10
Calcolo SER
Prima formulazione:
(
)
( )
PS (e | sT = si ) = P ρ ∉ V si | sT = si =
= 1 − P( ρ ∈ V ( si ) | sT = si )
Seconda formulazione:
(
( )
)
PS (e | sT = si ) = P ρ ∉ V si | sT = si =
= ∑ P( ρ ∈ V ( s j ) | sT = si )
j ≠i
11
Calcolo SER
Per calcolare la SER useremo:
1 m
PS (e) = ∑ PS (e | sT = si )
m i =1
Dove:
APPROCCIO 1
PS (e | sT = si ) = 1 − P( ρ ∈ V ( si ) | sT = si )
Oppure
APPROCCIO 2
PS (e | sT = si ) = P( ρ ∉ V ( si ) | sT = si ) = ∑ P( ρ ∈ V ( s j ) | sT = si )
j ≠i
12
Calcolo SER
APPROCCIO 1
PS (e | sT = si ) = 1 − P( ρ ∈ V ( si ) | sT = si )
13
Calcolo SER
APPROCCIO 2
PS (e | sT = si ) = P( ρ ∉ V ( si ) | sT = si ) = ∑ P( ρ ∈ V ( s j ) | sT = si )
j ≠i
14
Peso e distanza di Hamming
H k = {v = (u1 ,.., ui ,..uk )}
Dato un vettore binario (ad esempio con k componenti), si definisce peso
di Hamming del vettore binario il numero di componenti uguali ad
1:
wH ( v ) = {i : ui = 1}
Esempio
v = (10110) → wH ( v ) = 3
15
Peso e distanza di Hamming
H k = {v = (u1 ,.., ui ,..uk )}
La distanza di Hamming tra due vettori binari è definito come il
numero di componenti dove i due vettori sono diversi:
d H ( v1 , v2 ) = {i : u1i ≠ u2i }
Esempio:
v1 = (10110)
v 2 = (01101)
→ d H ( v1 , v 2 ) = 4
16
Peso e distanza di Hamming
H k = {v = (u1 ,.., ui ,..uk )}
Introducendo la somma modulo 2 (EXOR) tra elementi di Z2
+
0
1
0
0
1
1
1
0
possiamo definire la somma modulo 2 tra due vettori binari come somma
componente per componente:
v1 = (u11 ,.., u1i ,..., u1k )
v 2 = (u21 ,.., u2i ,..., u2 k )
v1 + v 2 = (u11 + u21 ,.., u1i + u2i ,.., u1k + u2 k )
17
Peso e distanza di Hamming
H k = {v = (u1 ,.., ui ,..uk )}
Chiramente, la distanza di Hamming tra due vettori è uguale al peso di
Hamming della somma modulo 2 dei due vettori
d H ( v1 , v 2 ) = wH ( v1 + v2 )
Esempio:
v1 = (10110)
v 2 = (01101)
v1 + v 2 = (11011)
→ d H ( v1 , v 2 ) = wH ( v1 + v 2 ) = 4
18
Calcolo BER
Il passaggio dalla SER alla BER non è immediato: per costellazioni non
banali dipende fortemente dal labeling binario scelto.
Se il segnale ricevuto è corretto (sR= sT) anche il vettore binario di
informazione è corretto (vR= vT).
Se il segnale ricevuto è sbagliato (sR≠ sT) sicuramente il vettore binario di
informazione è sbagliato (vR ≠ vT), ma il numero di bit sbagliati dipende
dal labeling. In percentuale il loro numero vale:
d H (v R , vT )
k
(dH = distanza di Hamming tra vettori binari = numero di bit dove i vettori sono diversi)
Il passaggio dalla SER alla BER non è quindi immediato: per costellazioni
non banali dipende fortemente dal labeling binario scelto.
19
Calcolo BER
Per calcolare la BER si usa ancora il teorema della probabilità totale:
1 m
Pb (e) = ∑ Pb (e | sT = si )
m i =1
Il calcolo della BER deve sempre avvenire (a meno di costellazione banali)
seguendo l’approccio 2, perché è necessario separare il contributo alla
BER di ogni segnale diverso da quello trasmesso:
Pb (e | sT = si ) = ∑
j ≠i
d H (v j , vi )
k
( )
dove v = e−1 s
i
i
P( ρ ∈ V ( s j ) | sT = si )
( )
e v j = e−1 s j
20
Calcolo BER
Per calcolare la BER useremo:
Dove (APPROCCIO 2):
1 m
Pb (e) = ∑ Pb (e | sT = si )
m i =1
Pb (e | sT = si ) = ∑
j ≠i
d H (v j , vi )
k
P ( ρ ∈ V ( s j ) | sT = si )
21
Calcolo SER e BER costellazione binaria antipodale
Calcolo della probabilità di errore per una costellazione binaria
antipodale
Consideriamo una costellazione binaria monodimensionale (d=1) con due
segnali (m=2) antipodali (simmetrici rispetto all’origine).
M = {s1 = (+ A) s2 = (− A) }
Le due regioni Voronoi sono:
V ( s1 ) = {ρ = ( ρ1 ) , ρ1 ≥ 0 }
V ( s2 ) = {ρ = ( ρ1 ) , ρ1 ≤ 0 }
22
Calcolo SER e BER costellazione binaria antipodale
Applichiamo la definizione:
1 m
1
PS (e) = ∑ PS (e | sT = si ) = PS (e | sT = s1 ) + PS (e | sT = s2 )
2
m i =1
Calcoliamo
PS (e | sT = s1 )
e
PS (e | sT = s2 )
23
SER/BER computation for binary antipodal signals
Per calcolare
PS (e | sT = s1 ) usiamo ad esempio l’approccio 2
PS (e | sT = s1 ) = P( ρ ∈ V ( s2 ) | sT = s1 ) = P( ρ1 < 0 | sT = s1 )
Abbiamo:
dove
r = sT + n
r = ρ = ( ρ1 )
sT = s1 = (+ A)
n = (n1 )
Di conseguenza, quando sT=s1:
ρ1 = A + n1
24
SER/BER computation for binary antipodal signals
PS (e | sT = s1 ) = P( ρ1 < 0 | sT = s1 ) = P( A + n1 < 0) = P(n1 < − A)
La variabile casuale n1 è Gaussiana, con valor medio nullo e varianza
N0/2
A2
1
PS (e | sT = s1 ) = P (n1 < − A) = P (n1 > A) = erfc
N
2
0
25
Sulla funzione erfc
Le distribuzioni f r ( ρ | sT = si ) sono ddp di tipo gaussiano.
Incontreremo molto spesso il seguente problema:
Data una variabile casuale n monodimensionale con ddp gaussiana
-
Valor medio
-
varianza
-
ddp
Calcolare
µ
σ2
( x − µ )2
f n ( x) =
exp(−
)
2
2σ
2πσ 2
1
+∞
P(n > x) =
∫
x
1
x−µ
f n ( x) dx = erfc
2
2
σ
26
Sulla funzione erfc
erfc( x) =
dove
Infatti
2
π
+∞
P(n > x) =
∫
π
+∞
∫
( x−µ )
−t 2
∫e
f n ( x) dx =
e dt =
−t 2
dt
x
+∞
x
1
+∞
∫
x
( x − µ )2
exp(−
)dx =
2
2
2σ
2πσ
1
1
x−µ
erfc
2
σ
2
2σ
Nel caso di ddp gaussiana con valor medio nullo e varianza N0/2 si ottiene
x2
1
x−µ 1
P(n > x) = erfc
= erfc
N
2
2σ 2
0
27
Sulla funzione erfc
erfc( x) =
2
π
+∞
∫e
−t 2
dt
x
Per valutare numericamente la erfc, si può usare limitazione :
erfc( x ) ≤ e − x
28
SER/BER computation for binary antipodal signals
Calcoliamo ora
PS (e | sT = s2 )
PS (e | sT = s2 ) = P( ρ ∈ V ( s1 ) | sT = s2 ) = P( ρ1 > 0 | sT = s2 )
In questo caso:
r = sT + n
r = ρ = ( ρ1 )
sT = s2 = (− A)
n = (n1 )
Di conseguenza, quando sT=s2:
ρ1 = − A + n1
29
SER/BER computation for binary antipodal signals
PS (e | sT = s2 ) = P(− A + n1 > 0) = P(n1 > A)
A2
1
PS (e | sT = s2 ) = erfc
N0
2
30
Calcolo SER e BER costellazione binaria antipodale
Abbiamo ottenuto
PS (e | sT = s1 ) = PS (e | sT = s2 )
E quindi :
1
PS (e) = PS (e | sT = s1 ) + PS (e | sT = s2 ) = PS (e | sT = s1 )
2
Si ha quindi
A2
1
PS (e) = PS (e | sT = s1 ) = erfc
2
N
0
[ Risultato che ci servirà dopo: notiamo che si può scrivere, introducendo la
distanza d tra i due segnali:
d2
1
PS (e) = erfc
4 N0
2
31
Costellazioni GU
I due segnali avevano regioni di Voronoi congruenti.
Le due probabilità di errore sono risultate uguali.
Possiamo indurre un ragionamento di validità generale sulle
costellazioni geometricamente uniformi.
32
Costellazioni GU
Una costellazione M è detta geometricamente uniforme se le
regioni di Voronoi dei suoi segnali sono congruenti ovvero
hanno tutte la stessa forma (sovrapponibili combinando
traslazione, riflessione e rotazione).
Usando l’approccio 1 si ha:
PS (e | sT = si ) = 1 − P( ρ ∈ V ( si ) | sT = si ) = 1 −
∫
f r ( ρ | sT = si ) d ρ
V ( si )
Le ddp Gaussiane hanno la stessa espressione analitica per ogni
segnale trasmesso. Le aree di integrazioni hanno la stessa
forma e quindi la probabilità PS (e | sT = si ) è la stessa per
ogni segnale trasmesso.
33
Costellazioni GU
Per una costellazione geometricamente uniforme
PS (e | sT = si )
è la stessa per ogni segnale si della costellazione trasmesso.
Segue:
1 m
PS (e) = ∑ PS (e | sT = si ) = PS (e | sT = s1 )
m i =1
La probabilità di errore si può calcolare considerando un solo
segnale qualsiasi della costellazione (ad esempio s1)
(Molte costellazioni usate in pratica sono GU)
34
Calcolo SER e BER costellazione binaria antipodale
Abbiamo calcolato:
A2
1
PS (e) = erfc
N0
2
Vogliamo esprimere questa probabilità di errore in funzione del rapporto
Eb/N0. Abbiamo:
2
E ( s1 ) = E ( s2 ) = A
ES =
E quindi:
E ( s1 ) + E ( s2 )
2
= A2
ES
Eb =
= ES = A2
k
35
Calcolo SER e BER costellazione binaria antipodale
Per una costellazione binaria antipodale si ha quindi:
Eb
1
PS (e) = erfc
2
N0
36
Calcolo SER e BER costellazione binaria antipodale
Per questa costellazione ad ogni segnale è associato un bit. Ad esempio
possiamo stabilire questo labeling binario:
e : H1 ⇔ M
v1 = (0) ⇔ s1
v2 = (1) ⇔ s2
In ogni caso, se il segnale è ricevuto errato anche il bit corrispondente viene
ricevuto errato. Di conseguenza si avrà sicuramente:
Eb
1
Pb (e) = PS (e) = erfc
2
N0
37
Calcolo SER e BER costellazione binaria antipodale
Se proprio si vogliono esplicitare i conti:
Pb (e | sT = s1 ) =
d H (v2 , v1 )
P( ρ ∈ V ( s2 ) | sT = s1 ) =
k
= P( ρ ∈ V ( s2 ) | sT = s1 ) = PS (e | sT = s1 )
Segue:
PS (e) = Pb (e)
38
BER costellazione binaria antipodale
Risultato fondamentale
Per una costellazione binaria antipodale
Eb
1
Pb (e) = erfc
2
N0
Questa espressione lega la probabilità di errore sul bit al rapporto
è proporzionale alla potenza ricevuta S.
Eb/N0, che
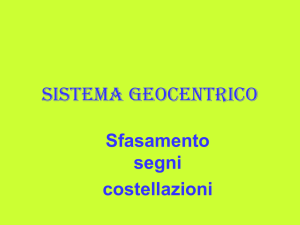
La rappresentazione usuale di queste curve di prestazioni viene effettuata
ponendo:
- sulle ascisse il rapporto
Eb/N0 in dB in scala lineare
- sulle ordinate il valore della
Pb(e) in scala logaritmica
39
Calcolo SER e BER costellazione binaria antipodale
Eb
1
Pb (e) = erfc
2
N0
costellazione binaria antipodale
1
0.1
0.01
1E-3
1E-4
1E-5
BER
1E-6
1E-7
1E-8
1E-9
1E-10
1E-11
1E-12
1E-13
1E-14
-2
0
2
4
6
8
Eb/N0 [dB]
10
12
14
16
40
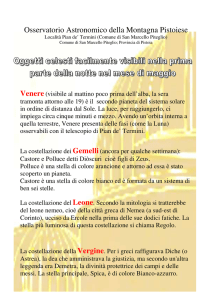
Calcolo SER e BER costellazione binaria antipodale
Importante:
L’espressione della BER vs. Eb/N0 non dipende dalla forma dei segnali
trasmessi ma solo dalla geometria della rappresentazione vettoriale di M.
Ad esempio, nel caso della costellazione binaria antipodale, l’espressione è la
stessa sia per
b1 (t ) =
1
PT (t )
T
che per
b1 (t ) =
2
PT (t ) cos(2π f 0t )
T
41
Calcolo SER costellazione 4-PSK
Calcolo della probabilità di errore per una costellazione 4-PSK
Consideriamo una costellazione bidimensionale (d=2) con quattro segnali
(m=4) equispaziati su un cerchio.
M = {s1 = (a, a) s2 = (− a, a ) s3 = (− a, − a ) s4 = (a, − a ) }
ss2
ss1
0
1
a
a
ss 3
2
ss 4
3
42
Calcolo SER costellazione 4-PSK
Le regioni di Voronoi sono:
V ( s1 ) = {ρ = ( ρ1 , ρ 2 ) , ( ρ1 ≥ 0) ∩ ( ρ 2 ≥ 0)}
V ( s2 ) = {ρ = ( ρ1 , ρ 2 ) , ( ρ1 ≤ 0) ∩ ( ρ 2 ≥ 0)}
V ( s3 ) = {ρ = ( ρ1 , ρ 2 ) , ( ρ1 ≤ 0) ∩ ( ρ 2 ≤ 0)}
V ( s4 ) = {ρ = ( ρ1 , ρ 2 ) , ( ρ1 ≥ 0) ∩ ( ρ 2 ≤ 0)}
Sono congruenti,
la costellazione è GU:
ss2
ss1
0
1
a
a
ss3
2
ss 4
3
43
Calcolo SER costellazione 4-PSK
Si ha:
1 m
PS (e) = ∑ PS (e | sT = si ) = PS (e | sT = s1 )
m i =1
Usiamo l’approccio 1:
PS (e | sT = s1 ) = 1 − P( ρ ∈ V ( s1 ) | sT = s1 )
44
Calcolo SER costellazione 4-PSK
Calcoliamo
P( ρ ∈ V ( s1 ) | sT = s1 ) = P(( ρ1 ≥ 0) ∩ ( ρ 2 ≥ 0) | sT = s1 )
Si ha:
r = sT + n
con:
r = ρ = ( ρ1 , ρ 2 )
sT = s1 = (a, a )
n = (n1 , n2 )
Di conseguenza, quando sT=s1:
ρ1 = a + n1
ρ 2 = a + n2
45
Calcolo SER costellazione 4-PSK
P( ρ ∈ V ( s1 ) | sT = s1 ) = P((a + n1 ≥ 0) ∩ (a + n2 ≥ 0)) = P((n1 ≥ − a) ∩ (n2 ≥ − a))
n0 e n1 sono v.c. gaussiane statisticamente indipendenti
P( ρ ∈ V ( s1 ) | sT = s1 ) = P(n1 ≥ −a) P(n2 ≥ − a)
46
Calcolo SER costellazione 4-PSK
Introduciamo
Si ha
a2
1
p = P(n > a) = erfc
N0
2
P(n1 ≥ −a) = 1 − P(n1 ≥ a) = 1 − p
P(n2 ≥ −a) = 1 − P(n2 ≥ a) = 1 − p
segue
P( ρ ∈ V ( s1 ) | sT = s1 ) = (1 − p ) 2
PS (e) = 1 − P( ρ ∈ V ( s1 ) | sT = s1 ) = 1 − (1 − p) 2 = 2 p − p 2
47
Calcolo SER costellazione 4-PSK
Vogliamo esprimere questa probabilità di errore in funzione del rapporto
Eb/N0. Abbiamo:
E ( s1 ) = E ( s2 ) = E ( s3 ) = E ( s4 ) = 2a 2
E quindi:
ES = 2 a 2
ES ES
=
= a2
Eb =
2
k
Segue:
a2 1
Eb
1
p = P(n > a) = erfc
= erfc
2
N0
N0 2
48
Calcolo SER costellazione 4-PSK
Per una costellazione 4-PSK (4 segnali equispaziati su un cerchio) abbiamo
quindi:
PS (e) = 2 p − p 2
con
Eb
1
p = erfc
2
N0
49
Calcolo BER costellazione 4-PSK (labeling di Gray)
Per calcolare
e:
Pb(e) consideriamo il seguente labeling (detto labeling di Gray):
H2 ⇔ M
v1 = (00) ⇔ s1
01/s4
a
v 2 = (10) ⇔ s2
v3 = (11) ⇔ s3
11/s3
a
00/s1
10/s2
v 4 = (01) ⇔ s4
50
Calcolo BER costellazione 4-PSK (labeling di Gray)
1 m
Pb (e) = ∑ Pb (e | sT = si )
m i =1
Dobbiamo usare l’approccio 2:
Pb (e | sT = s1 ) = ∑
j ≠i
d H (v j , v1 )
k
P( ρ ∈ V ( s j ) | sT = s1 ) =
1
2
1
= P( ρ ∈ V ( s2 ) | sT = s1 ) + P( ρ ∈ V ( s3 ) | sT = s1 ) + P( ρ ∈ V ( s4 ) | sT = s1 )
2
2
2
51
Calcolo BER costellazione 4-PSK (labeling di Gray)
Pb (e) =
1
2
1
P( ρ ∈ V ( s2 ) | sT = s1 ) + P( ρ ∈ V ( s3 ) | sT = s1 ) + P( ρ ∈ V ( s4 ) | sT = s1 )
2
2
2
a 1
Eb
1
p = P(n > a) = erfc
= erfc
2
2
N
0
N0
P( ρ ∈ V ( s2 ) | sT = s1 ) = P(n0 < − a) P(n1 > − a) = p(1 − p)
P( ρ ∈ V ( s3 ) | sT = s1 ) = P(n0 < − a ) P(n1 < − a ) = p 2
P( ρ ∈ V ( s4 ) | sT = s1 ) = P(n0 > − a) P(n1 < − a ) = (1 − p) p
Pb (e) =
A lezione:
calcolate in modo
grafico
1
1
p(1 − p) + p 2 + (1 − p) p = p
2
2
52
Calcolo BER costellazione 4-PSK (labeling di Gray)
Per una costellazione 4-PSK con labeling di Gray si ha quindi
Eb
1
Pb (e) = erfc
N
2
0
come per una costellazione binaria antipodale.
53
Modulazione 4-PSK
Giustificazione: Quando si usa il labeling di Gray, la costellazione 4-PSK può
essere vista come il prodotto cartesiano di due modulazioni 2-PSK
una sul canale I (primo bit) e una sul canale Q (secondo bit).
01
11
1
01
00
10
10
0
Il canale di trasmissione introduce due componenti di rumore statisticamente
indipendenti sul canale I e sul canale Q.
54
Modulazione 4-PSK
01
11
1
01
00
10
10
0
Dato il simbolo ricevuto ρ[n]=(ρ1[n] , ρ2[n]), quando si effettua la
decisione basata sulle regioni di Voronoi:
¾
¾
il segno della componente ρ1[n] lungo l’asse x determina univocamente
la scelta del primo bit
il segno della componente ρ2[n] lungo l’asse y determina univocamente
la scelta del secondo bit.
La 4-PSK con labeling di Gray si comporta come 2 costellazioni 2-PSK
trasmesse in parallelo.
55
Calcolo BER costellazione 4-PSK (labeling diverso)
Proviamo ore a calcolare
precedente:
e:
Pb(e) con il seguente labeling, diverso dal
H2 ⇔ M
v1 = (00) ⇔ s1
11/s4
a
v 2 = (01) ⇔ s2
v3 = (10) ⇔ s3
v 4 = (11) ⇔ s4
10/s3
a
00/s1
01/s2
56
Calcolo BER costellazione 4-PSK (labeling diverso)
1 m
Pb (e) = ∑ Pb (e | sT = si )
m i =1
Pb (e | sT = s1 ) = ∑
j ≠i
d H (v j , v1 )
k
P( ρ ∈ V ( s j ) | sT = s1 ) =
1
1
2
= P( ρ ∈ V ( s2 ) | sT = s1 ) + P( ρ ∈ V ( s3 ) | sT = s1 ) + P( ρ ∈ V ( s4 ) | sT = s1 )
2
2
2
1
1 2
Pb (e) = p (1 − p) + p + (1 − p ) p =
2
2
3
p − p
2
57
Calcolo BER costellazione 4-PSK
Per una costellazione 4-PSK con labeling di Gray si ha, detto
Eb
1
p = erfc
2
N0
Pb (e) = p
Per una costellazione 4-PSK con labeling “naturale” si ha invece
3
Pb (e) = p − p > p
2
La probabilità di errore è peggiorata.
58
Labeling binario e BER
Analizzando l’espressione della Pb(e)
Pb (e | sT = si ) = ∑
j ≠i
d H (v j , vi )
k
P(r ∈ V ( s j ) | sT = si )
si intuisce che, quando scelgo un labeling binario, cioé una corrispondenza
tra segnali di M e vettori binari, devo cercare di minimizzare la distanza di
Hamming dei vettori associati a segnali adiacenti.
(Infatti, gli eventi di errore con probabilità più alta sono quelli di cadere nelle
regioni di Voronoi dei segnali a minima distanza da quello trasmesso.
Questo è tanto più vero quanto più cresce il rapporto Eb/N0. Infatti,
fissata Eb, se Eb/N0 cresce, N0 diminuisce, quindi diminuisce la varianza
delle componenti di rumore. Se la varianza è piccola significa che le
distribuzione Gaussiane sono concentrate attorno all’origine: quando si
sbaglia, si sbaglia solo su regioni di Voronoi vicine a quelle del segnale
trasmesso.)
59
Labeling di Gray
Data una costellazione, un labeling di Gray è definito in questo modo:
Considero ogni segnale si. Ad esso è associato il vettore binario ui =e-1( si ).
Considero tutti i segnali adiacenti a si (a minima distanza Euclidea da si) e gli
associo dei vettori binari a distanza di Hamming 1 da ui ..
In questo modo viene minimizzata la BER asintotica (alto Eb/N0 e bassa BER)
60
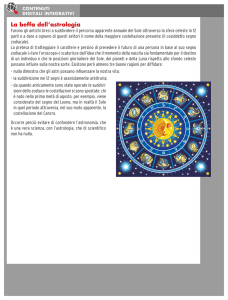
Labeling di Gray
[Esempio: Gray Labeling 8-PSK]
011
001
111
101
100
000
010
110
IMPORTANTE: cambiando il labeling cambia il solo BER. La SER riguarda solo
la forma della costellazione e non dipende dal labeling binario.
61