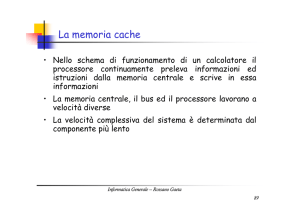
LA MEMORIA
SRAM e D R A M
|
|
static
dynamic
random access memory
SRAM: unità che memorizza un gran numero di parole in un
insieme di flip-flop, opportunamente connessi, mediante un
sistema di indirizzamento e trasferimento (lettura/scrittura)
di parole.
I flip-flop della memoria si dividono in 2k gruppi di h flip-flop,
ciascuno dei quali memorizza una parola di h bit.
Ogni gruppo è sostanzialmente un registro cui è logicamente
associato un indirizzo di k bit nell’intervallo 0 .. 2k –1.
La configurazione di una SRAM è completamente definita
specificando il numero 2k di celle indirizzabili (dimensione
verticale o altezza – height) e la dimesione h della cella
(dimensione orrizzontale o larghezza – width).
k
SRAM
h
2k × h
h
k ingressi per l’indirizzo
h ingressi per i dati
h uscite per i dati
3 ingressi di controllo
attivazione/selezione (chip select)
abilitazione uscita (output enable)
abilitazione scrittura (write enable)
La struttura con i multiplexor utilizzata per l’indirizzamento
all’interno del banco dei registri non è utilizzabile per memorie a
grandi dimensioni. In questo caso si utilizzano porte di
collegamento a tre stati che, distribuite tra le celle di memoria,
risultano più efficienti di un unico (gigantesco) multiplexor.
Per evitare decodificatori troppo grandi si organizza la memoria
in modo gerarchico e si usa un metodo di decodifica a due fasi.
Esempio.
Si consideri una SRAM 32 × 2.
Per indirizzare una tale memoria servono 5 bit (25 =32).
I dati in input ed in output sono di 2 bit.
Si puo’utilizzare prima un indirizzo a 3 bit (bit 4-3-2) per
selezionare la memoria di primo livello ed accedere poi ai dati
utilizzando i rimanenti 2 bit (bit 1-0).
110
10
000
001
110
111
DRAM
Mentre nella memoria statica (SRAM) il bit memorizzato viene
mantenuto per un tempo arbitrario (finché c’è alimentazione),
nella memoria dinamica (DRAM) un bit viene espresso sotto
forma di stato di carica di un transistor, non è stabile e quindi va
“rinfrescato” periodicamente.
Questo può essere fatto direttamente con un circuito di controllo
integrato sul componente di memoria liberando il processore
dall’operazione di rinfresco.
Usando meno transistor, la densità di bit memorizzati in una
DRAM è molto più alta rispetto ad una SRAM e quindi la DRAM
ha, a parità di capacità, un costo inferiore.
Nella DRAM la decodifica dell’indirizzo è un processo a due fasi,
simile a quello visto per la SRAM ma generalmente più lento.
Desiderio … .. irrealizzabile:
avere tanta memoria (potenzialmente infinita)
ad accesso molto veloce.
Soluzione … più realistica:
•avere tanta memoria (potenzialmente infinita)
strutturata gerarchicamete,
•con quella che ha più alta probabilità di servire subito
ad accesso più veloce;
•le altre, scendendo nella gerarchia, ad accesso sempre più lento.
CACHE
Le memorie più veloci (SRAM) saranno fisicamente più vicine
alla CPU al livello più alto, e manterranno i dati usati più di
recente, le altre (DRAM e dischi) formeranno i livelli più bassi.
La memoria più vicina al processore viene detta cache.
(cache = nascondiglio, luogo sicuro)
CPU
Cache
più veloce
più piccola
più costosa
RAM
Dischi, etc.
più lenta
più grande
meno costosa
Lo scambio di informazione avvene solo tra due livelli adiacenti.
L’unità di informazione che viene scambiata si dice blocco.
Quando arriva la richiesta di un dato ad un livello (livello
superiore) ci sono ovviamente due possibilità:
•il dato è presente a quel livello, e quindi la richiesta ha successo
(hit);
•il dato non è presente a quel livello, e quindi la richiesta non ha
successo (miss) e deve essere inoltrata al livello inferiore.
hit ratio: frequenza dei successi
miss ratio: frequenza dei fallimenti (1.0 – hit ratio)
hit time: è il tempo necessario per cercare il dato al livello
superiore.
Nota: anche quando il dato non è presente al livello superiore,
viene speso del tempo per cercare il dato in quel livello prima di
inoltrare la richiesta al livello inferiore.
miss penality: è il tempo necessario per passare l’informazione (il
blocco che contiene il dato cercato) da un livello inferiore ad un
livello superiore.
Principio di località:
•Località temporale: è probabile che un dato già utilizzato venga
riutilizzato dopo breve tempo.
•Località spaziale: è probabile che i dati utilizzati in un breve
intervallo di tempo siano memorizzati in zone vicine della
memoria.
Le memorie (memoria istruzioni e memoria dati) indicate
nella descrizione del processore sono cache.
• come si fa a sapere se un dato è presente nella cache?
• come si recupera un dato presente nella cache?
L’hit time chiaramente dipende dalla risposta a queste due
domande.
La risposta alla prima domanda diventa facile quando ogni blocco
può essere memorizzato in un solo posto della cache, ovvero se ad
ogni locazione di memoria corrisponde esattamente una locazione
della cache: indirizzamento diretto.
Sia M il numero di blocchi che possono essere contenuti nella
cache. Un semplice metodo di indirizzamento diretto consiste nel
prendere come indirizzo nella cache l’indirizzo del blocco modulo
M.
Se M = 2m allora l’indirizzo del blocco modulo M è dato dagli m
(=log2 (M)) bit meno significativi dell’indirizzo.
0
0
1
1
0
1
M = 8 = 23
0
0
0
0
1
0
0
1
0
1
0
1
0
0
1
0
1
1
0
1
1
0
0
0
1
1
0
1
0
1
1
1
0
0
1
0 1
5
9
13
17
21
25
1
1
1
0
1
29 31
Supponiamo di cercare il dato all’indirizzo 21 = 101012.
Dobbiamo prima sapere se la posizione 101 della cache contiene
un dato reale o no (cioè se è gia’stata caricata o no): aggiungiamo
un bit di validità.
Inoltre, dobbiamo sapere se la posizione 101 della cache contiene
il dato cercato oppure quello ad uno degli altri indirizzi che
vengono mappati in 101: aggiungiamo un insieme di tag.
Memorizzando un bit di validità ed un insieme di (etichette) tag
che contengono i bit più significativi dell’indirizzo (non usati per
l’indirizzamento nella cache) si può dare una risposta veloce alle
domande precedenti.
Esempio.
Supponiamo di cercare i dati ai seguenti indirizzi in una cache
inizialmente vuota.
ind10
ind2
cache
hit/miss
22
26
22
26
6
3
18
10 110
11 010
10 110
11 010
00 110
00 011
10 010
110
010
110
010
110
011
010
miss
miss
hit
hit
miss
miss
miss
Indirizzo
cache
000
001
010
011
100
101
110
111
bit di validità
tag
N
N
Y
N
N
N
Y
N
blocco
11
Mem(11010)
10
Mem(10110)
Osservazione.
Nell’architettura MIPS, i due bit meno significativi di ogni
indirizzo servono per individuare il byte all’interno della parola.
Se ogni blocco della cache contiene una parola (4 byte), i due bit
meno significativi dell’indirizzo non servono per indirizzare
all’interno della cache e l’indirizzo nella cache si forma
considerando i bit da 2 in poi.
Tag
Byte
offset
Indice
Bit di
validita'
Tag
=
Le memorie (memoria istruzioni e memoria dati) indicate
nella descrizione del processore sono cache.
In caso di miss la soluzione più semplice e’che l’unità di controllo
del processore sospenda (ponendosi in una situazione di stallo)
ogni operazione finchè, utilizzando un controllo separato, la
memoria non sia stata aggiornata.
Alcuni accorgimenti possono essere presi per diminuire i tempi di
stallo (e quindi di esecuzione).
Primo tipo di implementazione cache: blocchi di una parola
(DECStation 3100 - con processore MIPS2000)
La gestione delle richieste di lettura (sia di dato che di
istruzione) è quella più ovvia:
- L’indirizzo viene inviato alla memoria appropriata.
- Viene effettuato il controllo per la presenza nella cache.
In caso di hit si procede con l’esecuzione.
In caso di miss la richiesta viene inviata alla memoria
principale. Appena disponibile, il dato (o l’istruzione) viene
scritto nella cache e l’esecuzione riprende.
La gestione delle richieste di scrittura è un po’meno ovvia.
Problema dell' inconsistenza tra cache e memoria principale.
Se eseguendo una store il dato viene registrato solo nella
cache e non viene riportato anche nella memoria principale,
due posizioni corrispondenti (indirizzo + tag) potrebbero
contenere dati diversi.
Richieste di scrittura
Per mantenere la memoria principale e la cache sempre
consistenti, ogni modifica alla cache dovrebbe essere subito
riportata nella memoria principale.
Questa soluzione è detta di write-through.
Questa scelta ha chiaramente un costo (attesa che l’operazione di
scrittura in memoria principale sia completata) che, per
programmi con frequenti operazioni di memorizzazione, puo’
diventare molto elevato.
Per ridurre i costi si puo' utilizzare una memoria tampone (write
buffer): il processore scrive il dato nella cache e nel buffer e poi
prosegue l’esecuzione.
Il processo di scrittura nella memoria principale avviene in
parallelo prelevando un dato alla volta dal write buffer (liberando
man mano spazio per memorizzazioni successive).
In caso di frequenti operazioni di scrittura, il processore può
ugualmente dover entrare in una situazione di stallo aspettando
che il buffer si liberi.
Un'altra tecnica utilizzata prevede la scrittura in memoria solo nel
momento in cui il dato nella cache deve venir riscritto (write
back).