Capitolo 6
Traiettorie interplanetarie
Finestra di lancio
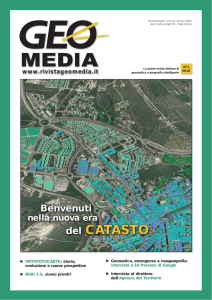
Supponiamo di voler trasferire la sonda S dalla Terra sul pianeta M. E’ necessario che la sonda e il
pianeta arrivino allo stesso punto x al medesimo istante. Bisogna quindi fissare l’istante di tempo in
cui la sonda entra nella traiettoria di trasferimento per raggiungere il pianeta nel punto x all’istante
previsto. Come da figura, assumendo che M si muova su un’orbita circolare, l’angolo percorso da
M nel tempo di volo della sonda sarà M nM t1 t0 dove t0 è il tempo iniziale. La sonda avrà
invece percorso nello stesso tempo un tratto di orbita di trasferimento definito dall’intervallo di
anomalia vera 1 0 M f . Se fissiamo l’orbita di trasferimento, cioè fissiamo il suo semiasse
ed eccentricità (per motivi di ottimizzazione at esempio, o per ridurre il tempo di volo) allora ν1 – ν0
resta fissato. Allora per far sì che pianeta M e sonda S si trovino allo stesso istante nel punto x
bisogna trovare γf . Una volta trovato γf, noi sappiamo che la sonda deve trovarsi in S nella
traiettoria di trasferimento all’instante t0. Il periodo di tempo in cui il lancio è consentito e permette
di posizionare la sonda sulla traiettoria di trasferimento nel punto S all’istante t0 è detto finestra di
lancio.
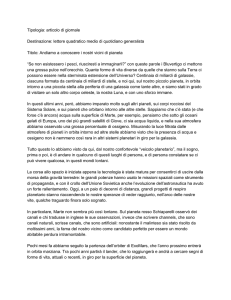
Tempo di volo
Supponiamo di voler mandare una sonda trasferire sulla Luna
una sonda che si trova su un’orbtia di parcheggio circolare
attorno alla Terra ad una altezza dalla superficie terrestre di h =
320 km. La Luna ha una distanza media dalla Terra pari a d =
384400 km. Se si compie un trasferimento di Hohmann allora il
semiasse maggiore dell'orbita di trasferimento è
r r 320 6384 384400
at 1 2
1,956 105 km
2
2
dove r1 sarà dato dalla somma di h e del raggio terrestre.
L'eccentricità di tale orbita di trasferimento si ricava sapendo che
at 1 e R h r1
quindi
r
e 1 1 0 ,9657
a
La variazione di velocità da imprimere alla sonda sarà:
Figura 17
1 e
m
3,08 103
a 1 e
r1
s
Il tempo di volo è semplicemente la metà del periodo orbitale della sonda posta sull’orbita di
trasferimento e quindi, sapendo che la massa della Terra vale M 5,9736 1024 kg , otteniamo:
v
Tof
n
a3
119, 4hr
5days
31
Per ridurre il tempo di volo è necessario aumentare l'eccentricità dell'orbita di trasferimento
perdendo in ottimizzazione (il consumo sarà maggiore). Se ad esempio la sonda venisse immessa su
r
di un orbita avente semiasse maggiore a' 2at allora e' 1 1 0 ,9828
a'
Ciò significa che la variazione di velocità da imprimere alla sonda è:
m
3, 20 103
a' 1 e'
r1
s
maggiore rispetto a quella richiesta per il trasferimento di Hohmann (quindi maggior consumo).
Per calcolare il tempo di volo in questo caso bisogna trovare il tempo richiesto dall’orbtia di
trasferimento per coprire la distanza angolare ν1-ν0.
Nonostante il periodo di questa seconda orbita di trasferimento
sia più lungo, comunque il tempo di volo risulterà inferiore
perché si giungerà al pianeta prima dell’afelio dell’orbita di
trasferimento dove viene spesa la maggior parte del tempo di
coasting.
v
1 e'
.
Figura 17
Sfera di influenza
Si consideri un sistema formato da tre corpi, dei quali uno ha massa trascurabile. Questo è il caso,
ad esempio, di un sistema composto da Sole-Terra-sonda, i quali hanno rispettivamente masse M ,
mp e mv=0.
Se per il moto di mv domina l’attrazione gravitazionale del sole, allora l’equazione del moto può
essere scritta rispetto al sole e la forza gravitazionale del pianeta è una perturbazione. L’equazione
del moto relativo al sole diventa:
r
r
r
rv GM v3 Gm p vp3 p3
r
rv
vp rp
Se invece è il pianeta con la sua attrazione gravitazionale a determinare il moto della sonda mentre
la forza gravitazionale del sole è una perturbazione, allora l’equazione del moto relativo al pianeta
diventa:
r
r
r
rvp Gm p vp3 GM v3 p3
r
rvp
v rp
rv indica la posizione della sonda rispetto al Sole, rvp la posizione della sonda rispetto
alla Terra. Il secondo termine tra parentesi indica il termine indiretto dovuto al moto del pianeta
attorno al sole. Possiamo riscrivere le equazioni nel seguente modo:
rvp K p Ps
rv K s Pp
La superficie in cui le perturbazioni sono circa uguali ai termini Kepleriani a due corpi, in cui vale
cioè la relazione:
32
Ps
Kp
Pp
Ks
è approssimativamente una sfera che prende il nome di sfera di influenza. Il suo raggio è:
mp
ri
M
Il raggio della sfera di influenza può essere
2
5
(3.6)
rp
confrontato con quello della sfera di Hill
1
rHill
mp
1 3
a.
M m 3
p
Se il rapporto tra la massa del pianeta (o in generale del corpo più piccolo) e il sole (o in generale il
corpo più massivo) è grande ( m p M ) allora la sfera di Hill risulta più grande di quella di
influenza, mentre succede il contrario (seppur di poco) nel caso opposto, ad esempio per il sistema
Terra-Luna. In ogni caso i due raggi sono comparabili.
All’interno della sfera di influenza di un pianeta il moto del corpo di prova può essere considerato
come quello a due corpi rispetto al pianeta con una piccola perturbazione dovuta ad Sole. La
traiettoria può essere trattata come un problema a due corpi perturbato. Mano a mano che ci si
avvicina alla sfera di influenza la perturbazione cresce fino a che il problema non può più essere
trattato efficacemente come un problema Kepleriano perturbato. Esiste una zona in prossimità della
sfera di influenza dove il moto sarà notevolmente complesso e non trattabile con il formalismo degli
elementi orbitali.
Esempi: sistema Sole-Terra
rHill 1.50 106 km
ri 9.29 105 km
sistema Terra-Luna
rHill 6.13 104 km
ri 6.62 104 km
aLuna 384400 km ri
33
Calcolo delle traiettorie interplanetarie: metodo delle patched-conics
Il metodo delle patched conics consiste nell’agganciare una sezione di conica ad un'altra. Ciascuna
sezione sarà un’orbita attorno ad un corpo, il sole o il pianeta. Nel punto di unione dovranno essere
aggiustati gli elementi orbitali in modo da rendere minimo il consumo di carburante che permette di
fare il trasferimento da un’orbita all’altra. Applichiamo ora questo metodo per una missione che
porti una sonda dalla Terra alla Luna. Supponiamo che la sonda sia già in orbita attorno alla Terra e
studiamo l’orbita di trasferimento che la porterà sulla sfera di influenza della Luna dove si passerà
ad una conica centrata sulla Luna. Supponiamo che la sonda si trovi ad una distanza r0 dalla Terra e
diamole una velocità v0 che formi un angolo 0 con la normale a v0 nel piano orbitale. Come in
figura, fissiamo anche l’angolo 1 con cui vogliamo che la sonda incontri la sfera di influenza della
Luna.
Figura 18
A partire dai questi quattro elementi iniziali vogliamo ricavare il tempo di volo Tof e l’angolo 0 .
Quest’angolo ci dice quando dobbiamo accendere i motori per arrivare alla Luna ed entrate nella
sua sfera di influenza con quel particolare angolo 1 . Per ottenere questo si passerà per le seguenti
variabili r1 ,v1 ,1 , 1 il cui significato è chiaro in figura.
Riassumendo:
34
r0 ,v0 ,0 ,1 r1 ,v1 ,1 , 1 Tof , 0
1) Calcolo del tempo di volo
v0 2
- Ricordando l'espressione dell’energia orbitale
si ricava il semiasse maggiore
2 r0
2a
dell'orbita di trasferimento.
- Dall'equazione dell'integrale momento angolare è possibile ricavare l'eccentricità
h r r r0v0 cos 0 a 1 e2
- Tramite l'equazione trigonometrica dei coseni si calcola r1
2
m 5
r1 D2 Rs 2 2DRs cos 1 con Rs raggio della sfera di influenza Rs 2 D .
m1
- Riprendendo ancora le equazioni dell'integrale energia e dell'integrale momento angolare è
possibile calcolare la velocità in r1 e l'angolo 1
r v cos 0
h
0 0
v1 2 e cos 1
r1v1
r1v1
r1 2a
Rs
sin 1
r1
e 0 si fa ricorso prima all'equazione della conica di trasferimento e poi
- Tramite l'identità trigonometrica dei seni infine si calcola l'angolo γ1 : sin 1
- Per calcolare infine Tof
all'equazione di Keplero
r0 1 e cos f
0
r
1 1 e cos f1
quindi
M 0 U 0 e sinU 0
con
M1 U1 e sinU1
Tof
r0
cos f 0 r e
0
cos f r1
1
r1e
m
M1 M 0 nm2 t
am2 3
m2
M1 M 0
tan
2
am2 3
;
U
1 e
tan
2
1 e
2
U0
U1
Tof
0 f1 f 2 1 m2 t1 t2
2) Orbita attorno alla Luna
Vogliamo ora calcolare l’orbita della sonda
quando entra nella sfera di influenza Lunare e
quindi passa da un moto centrato attorno alla
Terra ad uno centrato attorno alla Luna.
Riferiamo la sonda alla Luna. La velocità
relativa sonda-Luna risulta
v 2 v1 v m2 con v m2 velocità della Luna. .
Il modulo della velocità v2 è facilmente
calcolabile tramite il teorema di Carnot
v2 v12 vm2 2 2v1v2 cos 1 1
Figura 19
35
L' elemento orbitale che occorre per conoscere l'orbita della sonda attorno alla Luna è l'angolo ε.
Si inizia col proiettare le velocità perpendicolarmente al
vettore r2 (v. fig. 20)
v2 sin vm2 sin 1 v1 sin vm2 cos 1 v1 sin
2
Si trasforma ora l'angolo α in un elemento orbitale già noto
1 1 1 1 1 1
quindi
2
2
sin cos 1 1 1
In conclusione
v2 sin vm2 cos 1 v1 cos 1 1 1
da cui si ricava ε.
Figura 20
La sonda entra quindi nella sfera di influenza con un vettore posizione il cui modulo Rs r2 e una
velocità pari v2. Grazie all'integrale energia si può calcolare il semiasse maggiore a2 riferito
all’orbita attorno alla Luna.
m
v2 2 m2
2
2
r2
2a2
e tramite l'integrale momento angolare si calcola infine l'eccentricità e2
h r2v2 sin 2 a2 1 e2
2
Questi calcoli possono essere iterati in modo da ottenere l’orbita di arrivo sulla Luna che può essere
più facilmente modificata dai motori in un orbita di parcheggio, di flyby o di atterraggio. Il
procedimento consiste nel cambiare le quattro variabili di partenza r0 ,v0 ,0 ,1 fino a che non si
ottiene un’orbita di arrivo con a2 ed e2 opportuni.
Dinamica del gravity assist ed effetto fionda
Durante la progettazione di missioni interplanetarie è possibile sfruttare la forza di gravità dei
pianeti tramite passaggi ravvicinati allo scopo di aumentare la velocità della sonda e/o di deviarne la
traiettoria senza dover ricorrere all'uso dei motori. La prima missione che sfruttò l’effetto fionda
gravitazionale, o gravity assist, fu il Mariner 10. La traiettoria, progettata da Giuseppe Colombo e
lanciato il 3 novembre 1973, prevedeva un passaggio ravvicinato con Venere per raggiungere
l’orbita di Mercurio troppo interna rispetto a quella della Terra per essere raggiungibile solo con i
motori a quel tempo disponibili. Durante il Flyby a Venere ad una distanza di circa 5770 km fu
osservata per la prima volta la sua atmosfera. La gravità di Venere permise alla sonda di
raggiungere l’orbita di Mercurio su un’orbita eliocentrica retrograda e di effettuare tre passaggi
ravvicinati con una distanza minima di circa 327 km all’ultimo passaggio.
36
Immagine di Mercurio presa dalla Mariner 10
Di seguito sono proposte alcuni schemi di missioni portate a termine nelle quali è stato fatto uso di
manovre gravitazionalmente assistite.
Figura 23
La figura a fianco mostra il principio base di
una manovra di gravity assist. Si consideri una
sonda che viaggia con velocità v s rispetto al
Sole e che stia avvicinandosi ad un pianeta per
la manovra di gravity assist. Si supponga che
il pianeta viaggi con velocità v p rispetto al
Sole. La velocità con cui la sonda si muove
rispetto al pianeta è quindi v vs v p .
Dopo aver compiuto un flyby su di un tratto di
orbita iperbolica la sonda uscirà dalla sfera di
influenza del pianeta con una velocità pari a
Figura 24
37
v rispetto al pianeta e, nel sistema eliocentrico, pari a vs v v p . L’obiettivo è quello di
calcolare la velocità v s una volta noti i parametri del passaggio ravvicinato. In altre parole,
determinare quali parametri del passaggio ravvicinato sono in grado di determinare il Δv che serve
per la missione.
(3.7)
Questi parametri sono: la velocità con cui la sonda
viaggia rispetto al pianeta se posta ad una distanza
infinita v e la minima distanza dal pianeta
durante il flyby r0. Da questi due parametri è
possibile ricavare tutti gli elementi evidenziati in
figura 25, in particolare il parametro d'impatto D ed
il turn angle γ.
Per un’orbita iperbolica, l’equazione della traiettoria
è:
h2
con
(3.7)
r f
a e2 1
1 e cos f
L'integrale momento angolare e l'integrale energia
sono:
h a e2 1
v2
2 r 2a
Figura 25
(3.8)
(3.9)
Dalla relazione 3.9 è possibile ricavare sia la velocità v0 in corrispondenza alla distanza di minimo
avvicinamento r0 che il semiasse maggiore a
2
v0 2 v
2
ma r e quindi
0 v0 v 2
2 r0
2
r
r
r0
v0 2
2 r0 2a
a
v 2
In pratica come valore di v viene presa la velocità della sonda rispetto al pianeta quando la prima
entra nella sfera di influenza del secondo. E' lecita questa approssimazione dato che il raggio della
sfera di influenza del pianeta è sufficientemente grande.
Dalla 3.8 si possono calcolare il parametro d'impatto D e l'eccentricità e
2 r0
h r0v0 v D
D r0 2
v 2
h a e 2 1 r0v0
e 1
v 2 r0
(3.10)
Il parametro d'impatto assume un ruolo importante nelle collisioni tra oggetti interstellari. Si
definisce come sezione d'urto di un pianeta l'area entro la quale un oggetto deve passare per
collidere col pianeta. Se ad esempio il pianeta è sferico ed ha un raggio R allora la sezione d'urto
geometrica è banalmente geom R2 . Il pianeta, però, esercita sull'oggetto una forza attrattiva; di
conseguenza tale oggetto potrebbe comunque impattare col pianeta per l’effetto di focusing della
38
forza
di
gravità. Si definisce quindi la sezione d'urto gravitazionale come
2 R
gravitaz D 2 R 2 2 . Da notare che nella formula riportata si è posto r0 R dove R è il
v
raggio del pianeta dato che r0 rappresenta la minima distanza raggiunta dall'oggetto vagante
durante il flyby.
Per calcolare infine il turn angle occorre fare ricorso alla longitudine vera f.
Usando l'espressione 3.7 della posizione in coordinate polari ed imponendo una distanza infinita
allora il corrispondente valore di f che definisce l’asintoto è
1
1 ecos f0 0 quindi cos f 0
e
Osservando la figura a fianco è immediato
ricavare le seguenti uguaglianze
f0 f0
2 2
2
2
1
quindi sin cos f 0 e sostituendo ad e
2
e
l'espressione trovata precedentemente risulta
2 arcsin
r0 v 2
Come già anticipato le relazioni di
conversione delle velocità dal sistema
eliocentrico a quello planetocentrico sono:
prima del flyby: v vs v p
(3.11)
Figura 26
dopo il flyby: v vs v p
Sapendo inoltre che v p v p v p , dato che il pianeta non varia la sua velocità per il fatto che
possiede una massa notevolmente più grande di quella della sonda e inoltre il tempo impiegato dal
passaggio è molto minore del periodo orbitale, allora la variazione di velocità impressa alla sonda è
v v v v s v s
Tenendo inoltre presente che v v v in modulo (cambia solo la direzione) e applicando il
teorema dei coseni risulta:
v 2 v 2 v 2 2v v cos 2v 2 1 cos 2v 2 1 cos 2 f 0
2v 2 1 cos 2 f 0 cos sin 2 f 0 sin 2v 2 1 2 cos 2 f 0 1 4v 2 cos 2 f 0
4v 2
e2
In conclusione
2v
(3.12)
e
La corrispondente variazione di energia orbitale della sonda durante la manovra risulta:
E 2v p v sin sin
(3.13)
2
Il nuovo angolo introdotto, , è detto angolo di entrata. Esso è l'angolo compreso tra un asse
avente origine nel Sole e passante per il pianeta e il semiasse maggiore dell'iperbole. Quest'ultimo è
orientato come mostrato in figura.
v
39
A seconda che l'angolo d'entrata sia compreso tra 0 e π o tra π e 2 π la variazione di energia
impressa al probe è rispettivamente negativa o positiva.
Figura 27
40
Problema di Lambert
Si supponga di voler portare un corpo da un
punto iniziale P1 ad un punto P2 per mezzo di
una traiettoria ellittica. L'equazione dell'ellisse
impone le due seguenti condizioni
P1 F P1 F * 2a
P1F * 2a r1
*
*
P2 F P2 F 2a
P2 F 2a r2
Figura 28
Le ultime due equazioni definiscono i raggi di
due circonferenze mostrate in figura (linee tratteggiate) e centrate rispettivamente in P1 ed in P2. Le
loro intersezioni forniscono le possibili soluzioni della posizione del fuoco vacante F* e permettono
quindi di definire in modo univoco l’ellisse tramite cui andare da P1 a P2. In realtà esistono due
soluzioni in quanto due sono le possibili intersezioni delle circonferenze. Nel caso limite in cui le
due circonferenze sono tangenti e quindi i due punti si uniscono in uno si ha la soluzione che
fornisce il semiasse maggiore minimo am (figura 30). Il suo valore si può facilmente calcolare
come:
2am r2 2am r1 c am r1 r2 c
dove c è la distanza tra i punti P1 e P2. In
questo caso il fuoco vacante F* si trova sulla
retta congiungente P1 e P2. Questa ellisse
rappresenta quella di minima energia. Si può
calcolare anche quella di minima eccentricità
che risulta essere pari a em=(r2-r1)/c.
Figura 29
Figura 30
Il formulazione precisa del problema dei Lambert è la seguente: stabilito il tempo di volo Tof per
andare dai punti P1 e P2 ed il fuoco F (cioè r1, r2, c e θ, dove θ è l’angolo sotteso da r1 e r2), si
richiede di calcolare l'orbita ellittica di trasferimento.
Per risolvere il problema di Lambert sono necessarie le seguenti identità trigonometriche:
1
1
1. cos cos cos cos
2
2
41
2. cos cos cos sin sin
3. cos cos 2 sin
sin
2 2
4. sin sin 2 cos
sin
2 2
5. cos 1 2 sin 2
2
I dati di partenza del problema sono 4:
r1, r2, c e Tof . Sapendo che
r a 1 ecosU allora
r1 r2 a 1 e cosU1 1 e cosU 2
a 2 e cosU1 cosU 2
Si definiscono ora i seguenti angoli:
U U2
U U1
UP 1
e UM 2
.
2
2
Utilizzando la prima identità trigonometrica
si ha che
r1 r2 a 2 2ecosU M cosU P
Figura 31
Sapendo poi che c 2 x2 x1 y2 y1 e che x a cosU e y b sinU su un’orbita ellittica,
allora
2
2
c 2 a cosU 2 a cosU1 a 1 e 2 sinU 2 a 1 e 2 sinU1
2
a 2 cosU 2 cosU1 1 e 2 sinU 2 sinU1
2
2
e usando le identità trigonometriche 3 e 4 si ottiene:
c 2 a 2 2 sinU P sinU M 1 e2 2 cosU P sinU M
2
2
2
4a sin U
2
2
M
e 2 cos 2 U P sinU M
4a 2 sin2 U M 1 e2 cos 2 U P
Si introduce ora l'angolo ξ tale che cos e cosU P . Quest'uguaglianza è lecita dato che
l'eccentricità e ha sempre un valore inferiore ad 1. Allora:
c 2 4a 2 sin 2 U M 1 cos 2 4a 2 sin 2 U M sin 2
Riassumendo, le due espressioni trovate sono
r1 r2 a 2 2ecosU M cosU P 2a( 1 cosU M cos )
c 2a sinU M sin
Si definiscono ora due nuovi angoli: U M e U M . Sarà utile in successivi passaggi
sapere anche che U M
,
e U 2 U1
2
2
Per terminare questa prima fase si calcolano α, β ed a in funzione degli elementi noti r1, r2 e c. Per i
seguenti passaggi si è fatto ricorso alle identità 2 e 5.
42
r1 r2 c 2a 1 e cosU M cosU P sinU M sin 2a 1 cosU M cos sinU M sin
2a 1 cos U M 4a sin 2
2
r1 r2 c 2a 1 e cosU M cosU P sinU M sin 2a 1 cosU M cos sinU M sin
2a 1 cos U M 2a 1 cos 4a sin 2
2
Si consideri ora l'equazione di Keplero. E' possibile scrivere
M 1 U1 e sinU1
con
M 2 M 1 n t2 t1
Tof
M 2 U 2 e sinU 2
a3
quindi
3
Tof a 2 U 2 U1 e sinU 2 sinU1
Ricordando quanto scritto a proposito della definizione di α e β e facendo ricorso all'identità 4 per
due volte si conclude
3
3
Tof a 2 e sinU 2 sinU1 a 2 2e cosU P sinU M
3
3
a 2 2 cos sinU M a 2 sin sin
Si ottiene quindi un sistema di 3 equazioni per le 4 incognite α, β, a, il semiasse dell’orbita cercata,
ed e, la sua eccentricità.
3
Tof a 2 sin sin
2
(3.14)
r1 r2 c 4a sin
2
2
r1 r2 c 4a sin 2
Le soluzioni sono quindi infinite. Possiamo però ridurre il numero delle soluzioni a 2 fissando ad
esempio il semiasse maggiore. Una volta dato il valore ad a , possiamo calcolare direttamente i
valori di e β ed eccentricità. Infine otteniamo anche f1 e f2 sfruttando le relazioni:
f 2 f1
a 1 e 2
r1
1 e cos f1
a 1 e2
r
2 1 e cos f 2
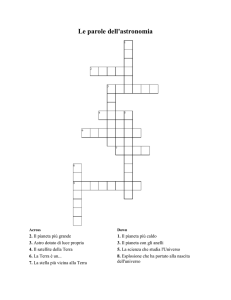
Dalle relazioni 3.14) possiamo studiare come varia il tempo di volo una volta fissato il semiasse
maggiore dell’orbita di trasferimento. Il grafico a fianco mostra l'andamento del Tof per diversi
valori di a nel caso di un’orbita di trasferimento dalla Terra a Marte. Sono fissati r1,r2 e θ e per
ogni valore di a si trovano due valori del Tof in accordo con le equazioni precedenti. Esiste un
valore minimo di semiasse maggiore che può essere calcolato sulla base degli argomenti geometrici
iniziali. Esiste anche un valore minimo di tempo di volo per orbite ellittiche che si ottiene
aumentando il semiasse maggiore. Per ottenere tempi di volo inferiori a t p è necessario ricorrere ad
43
orbite iperboliche. Come si ottiene il valore
di tp ? Si prende l’equazione di Lambert e si
manda il semiasse maggiore all’infinito,
ottenendo così l’orbita iperbolica limite.
Per comodità si introduce ora il nuovo
1
parametro s r1 r2 c . Di conseguenza
2
il sistema 3.14 risulta
1 r1 r2 c
s
sin
2 2
a
2a
1 r1 r2 c
sc
2 2
a
2a
Se a tende ad infinito allora estremi i seni
tendono a zero. Occorre quindi fare uno
sviluppo in serie intorno allo zero.
sin
Figura 32
3
3 5
3 5
a 2
3! 5!
3! 5!
32
52
32
52
3
2 s c
2 s c
2s
2s
2
a
a 3 2 3! a 5 2 5!
a 3 2 3!
a 5 2 5!
3
t p a 2 2 sin sin
Il secondo e il quarto termine dello sviluppo (e quelli successivi) tendono a 0 dato che
definitiva il tempo di trasferimento parabolico è pari a:
2
32
32
tp
s s c
3
44
a3 2
0 . In
a5 2