Segnali e Sistemi
Dispensa integrativa per l’insegnamento di Elementi di Controlli Automatici
Gianni Borghesan e Giovanni Marro
Indice
1 Introduzione
1.1 Notazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2
2 Classificazione dei segnali
2.1 Segnali a tempo continuo e a tempo
2.2 Segnali pari, dispari, periodici . . .
2.3 Energia e potenza di un segnale . .
2.4 Segnali singoli e multipli . . . . . .
3
3
5
5
6
discreto
. . . . .
. . . . .
. . . . .
.
.
.
.
.
.
.
.
3 Classificazione dei sistemi
3.1 Sistemi puramente algebrici e sistemi dinamici .
3.2 Sistemi causali e non causali . . . . . . . . . . .
3.3 Sistemi lineari e non lineari . . . . . . . . . . .
3.4 Sistemi stazionari e non stazionari . . . . . . . .
3.5 Sistemi stabili e instabili ingresso limitato-uscita
3.6 Lo stato iniziale dei sistemi dinamici causali . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . .
. . . . .
. . . . .
. . . . .
limitata
. . . . .
.
.
.
.
.
.
.
.
.
.
.
.
6
. 7
. 8
. 9
. 9
. 10
. 10
4 Analisi spettrale
4.1 Rappresentazione della serie di Fourier con esponenti
complessi o polare . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Rappresentazione della serie di Fourier in forma trigonometrica o cartesiana . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Rappresentazione della serie di Fourier in forma armonica . .
4.4 La trasformata di Fourier . . . . . . . . . . . . . . . . . . . .
4.5 La trasformata di Laplace . . . . . . . . . . . . . . . . . . .
1
12
. 12
.
.
.
.
13
15
16
17
1
Introduzione
Questo fascicoletto riporta alcuni complementi allo studio di Controlli
Automatici .
1.1
∈
∀
R
Rn
C
Cn
x∗
Z
C0
Ci
x(·)
x̃(·)
[α, β]
[α, β)
Notazione
appartenente a
per ogni
insieme dei numeri reali
insieme delle n-uple (vettori) di numeri reali
insieme dei numeri complessi
insieme delle n-uple (vettori) di numeri complessi
coniugato del numero complesso x
insieme dei numeri interi
classe delle funzioni limitate e continue a tratti
classe delle funzioni derivabili i volte q.o. con i-esima derivata ∈ C0
segnale a tempo continuo (x : R → R o x : R → C)
segnale a tempo discreto (x : Z → R o x : Z → C)
intervallo chiuso
intervallo aperto a destra
2
2
Classificazione dei segnali
Un segnale è una funzione che rappresenta il succedersi dei valori di una
grandezza fisica variabile nel tempo.
2.1
Segnali a tempo continuo e a tempo discreto
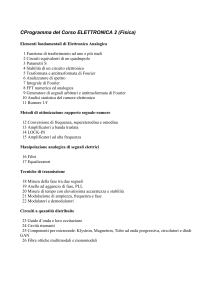
I segnali possono essere a tempo continuo o a tempo discreto. Questi si
rappresentano tipicamente come è indicato in Fig.1. Con il simbolo x(·) o x̃(·)
si indicherà l’ intero segnale a tempo continuo o discreto (la tilde caratterizza
il tempo discreto), mentre con x(t) o x̃(k) si indicherà il valore del segnale
all’ istante t o k.
x
0
x̃
-5 -4 -3 -2 -1 0 1 2
t
3
4 5
6
k
Figura 1: Segnali a tempo continuo e a tempo discreto.
Si noti che in entrambe le rappresentazioni è stata definita ed indicata con 0
un’ origine dei tempi , che determina la scala dei tempi. Quando l’ intervallo
di tempo in cui è definito il segnale non è specificato, si assume implicitamente
che sia t ∈ (−∞, ∞) o k ∈ (−∞, ∞). In altri casi esso viene dato, ad esempio
t ≥ 0 o k ≥ 0, oppure t ∈ [ta , tb ] o k ∈ [ka , kb ]. Anche l’ intervallo dei valori che
può assumere il segnale può essere o non essere esplicitamente specificato.
Esempi di segnali a tempo continuo: la temperatura in un ambiente, la corrente in un circuito elettrico, la pressione dell’ aria in un punto, che produce
un suono, rivelabile dall’ orecchio o da un microfono. Il microfono è un trasduttore, cioè un dispositivo che converte un segnale (pressione dell’ aria) in
un segnale di diverso tipo (tensione elettrica fra due terminali o corrente
elettrica in un circuito).
Esempi di segnali a tempo discreto: l’ indice di chiusura giornaliero della
Borsa di Milano, il traffico giornaliero in una stazione ferroviaria.
I segnali deterministici sono segnali i cui valori sono completamente assegnati
in ogni istante, mentre i segnali stocastici sono caratterizzati solo statisticamente. Ad esempio l’ indice di chiusura giornaliero della Borsa di Milano per
3
il passato è un segnale deterministico, per il futuro è un segnale stocastico.
Nel nostro contesto ci si occuperà solo di segnali deterministici.
x, x̃
x̃, x
0
0
t, k
k, t
Figura 2: Conversione da tempo continuo a tempo discreto e viceversa.
Spesso i segnali a tempo discreto si ottengono eseguendo il campionamento di
segnali a tempo continuo, come è indicato in Fig.2 a sinistra. Al campionamento in genere è associata la quantizzazione: al valore del segnale a tempo
continuo, espresso da un numero reale, viene associato un valore numerico
espresso da un numero finito di cifre, per cui esso può variare solo per incrementi finiti in un dato intervallo. La conversione inversa, da segnali a tempo
continuo a segnali a tempo discreto, viene eseguita mediante dispositivi di
tenuta, come è indicato in Fig.2 a destra.
I segnali a tempo continuo a valori reali si dicono anche segnali analogici ,
mentre i segnali a tempo discreto e a valori discreti si dicono segnali digitali .
I dispositivi che eseguono la conversione da segnali analogici a segnali digitali
si dicono convertitori analogico-digitale, mentre i dispositivi che eseguono la
conversione inversa si dicono convertitori digitale-analogico. I due tipi di
dispositivi vengono rappresentati negli schemi a blocchi come è indicato in
Fig.3.
x
A/D
x̃
x̃
D/A
x
Figura 3: Convertitore analogico-digitale e digitale-analogico.
Esempio: un suono registrato su un CD audio è campionato e quantizzato e
può essere riconvertito in segnale a tempo continuo mediante un dispositivo
di tenuta, amplificato e riconvertito in suono con un altoparlante.
È intuitivo che se il campionamento avviene a frequenza sufficientemente
elevata e la quantizzazione è sufficientemente fine la conversione di un segnale
4
analogico (a valori reali in un dato intervallo) in un segnale digitale (con un
numero finito di valori in un dato intervallo) e la conversione inversa possono
essere eseguite con errore trascurabile.
2.2
Segnali pari, dispari, periodici
Un segnale si dice pari se soddisfa la relazione
x(−t) = x(t) ∀ t
o
x̃(−k) = x̃(k) ∀ k
Un segnale si dice dispari se soddisfa la relazione
x(−t) = −x(t) ∀ t
o
x̃(−k) = −x̃(k) ∀ k
Gli esempi più comuni di segnali pari e dispari sono, rispettivamente, i segnali
x(t) = cos(ωt) e x(t) = sin(ωt).
Un segnale si dice periodico di periodo T o N se soddisfa la relazione
x(t + T ) = x(t) ∀ t
o
x̃(k + N ) = x̃(k) ∀ k
Il periodo fondamentale T0 o N0 è il più piccolo valore di T o N per cui le
precedenti relazioni sono soddisfatte.
2.3
Energia e potenza di un segnale
x
x
t
t
Figura 4: Segnale a energia finita e a potenza media finita.
L’ energia di un segnale a tempo continuo o discreto si definisce come
Z ∞
∞
X
2
E=
|x(t)| dt
o
E=
|x̃(k)|2
∞
k=−∞
5
La potenza media o valore efficace di un segnale a tempo continuo o discreto
si definisce come
1
P = lim
T →∞ T
Z
N
X
1
P = lim
|x̃(k)|2
N →∞ 2N + 1
k=−N
T /2
2
|x(t)| dt
o
−T /2
Esempi di segnali a tempo continuo ad energia finita e potenza media finita
sono rappresentati in Fig.4.
Per segnali periodici il valore efficace si riferisce al periodo e si definisce come
Z
1 X
1
|x(t)|2 dt
o
P =
|x̃(k)|2
(1)
P =
T T
N N
2.4
Segnali singoli e multipli
Nelle precedenti considerazioni con i simboli x(·) o x̃(·) ci si può riferire ad
una funzione che lega un solo valore reale alla variabile indipendente tempo
o ad una funzione che lega un vettore (n-upla di numeri reali) alla variabile
indipendente tempo. Nei due casi il segnale si dice rispettivamente singolo o
multiplo.
3
Classificazione dei sistemi
Un sistema è un modello matematico approssimante il comportamento di un
processo fisico, che lega un segnale di uscita o risposta y(·) ad un segnale di
ingresso o eccitazione x(·).
x
sistema
monovariabile
x1
x2
y
xp
sistema
multivariabile
y1
y2
yq
Figura 5: Sistema monovariabile e sistema multivariabile.
I sistemi si dicono a tempo continuo o a tempo discreto, a seconda del tipo di
segnale da essi elaborato. Nel caso dei sistemi a tempo continuo il segnale di
ingresso si suppone limitato e continuo a tratti (cioè con un numero finito di
punti di discontinuità per ogni intervallo temporale di misura finita), mentre
nel caso dei sistemi a tempo discreto il segnale di ingresso si suppone limitato.
6
Quindi un sistema equivale ad una trasformazione fra due funzioni. Nel caso
dei sistemi a tempo continuo si può scrivere
y(·) = F x(·) con x(·), y(·) definite in t ∈ (−∞, ∞)
(2)
mentre nel caso dei sistemi a tempo discreto si ha
ỹ(·) = F x̃(·) con x̃(·), ỹ(·) definite in k ∈ (−∞, ∞)
(3)
I segnali di ingresso e di uscita possono essere singoli o multipli. Nel primo
caso il sistema si dice monovariabile o SISO (single input-single output), nel
secondo si dice multivariabile o MIMO (multi input-multi output). In questo
secondo caso il valore della funzione di ingresso è un vettore a p componenti
reali e quello della funzione di uscita è un vettore a q componenti reali. Gli
schemi corrispondenti sono rappresentati in Fig.5.
3.1
Sistemi puramente algebrici e sistemi dinamici
Un sistema si dice puramente algebrico o privo di memoria se la sua uscita
all’ istante generico t o k dipende solo dal valore dell’ ingresso in quello stesso
istante. In caso contrario il sistema si dice dinamico o fornito di memoria.
R1
vi
R2
R
vu
vi
C
vu
Figura 6: Sistema puramente algebrico e sistema dinamico.
Esempi: Le relazioni
R2
vi (t) ,
t ∈ (−∞, ∞)
R1 + R2
Z t
1
vi (τ ) − vu (τ ) dτ ,
t, τ ∈ (−∞, ∞)
vu (t) =
R C −∞
vu (t) =
(4)
(5)
che si riferiscono ai circuiti elettrici di Fig.6, descrivono rispettivamente un
sistema a tempo continuo privo di memoria e un sistema a tempo continuo
fornito di memoria.
7
Le relazioni
ỹ(k) = k 2 x̃(k) ,
ỹ(k) =
k
X
p
k ∈ (−∞, ∞)
x̃(h) ,
k, h ∈ (−∞, ∞)
(6)
(7)
h=−∞
descrivono rispettivamente un sistema a tempo discreto privo di memoria e
un sistema a tempo discreto fornito di memoria.
3.2
Sistemi causali e non causali
Un sistema si dice causale se per ogni valore del tempo l’ uscita y(t) o ỹ(k)
all’ istante generico t o k dipende solo dai valori dell’ ingresso all’ istante
attuale o agli istanti precedenti, cioè da valori della funzione x(τ ), τ ∈ (−∞, t]
o x̃(h), h ∈ (−∞, k]. In caso contrario il sistema si dice non causale.
Esempi. I sistemi (4), (5), (6), (7) sono causali. Altri esempi di sistemi
causali sono
y(t) = x(t − t0 ) ,
t ∈ (−∞, ∞)
ỹ(k) = x̃(k − k0 ) ,
k ∈ (−∞, ∞)
(8)
(9)
con t0 reale non negativo e k0 intero non negativo. Questi sistemi sono detti
ritardi finiti, in quanto il segnale di uscita è uguale al segnale di ingresso
ritardato di t0 o k0 , mentre i sistemi
y(t) = x(t + t0 ) ,
t ∈ (−∞, ∞)
ỹ(k) = x̃(k + k0 ) ,
k ∈ (−∞, ∞)
detti anticipi finiti , sono non causali. L’ integratore
Z t
x(τ ) dτ ,
t, τ ∈ (−∞, ∞)
y(t) =
(10)
(11)
(12)
−∞
è un sistema causale, mentre il derivatore
d
x(t) ,
t ∈ (−∞, ∞)
(13)
dt
è non causale. Si considerino infatti i segnali gradino unitario, rappresentato
a sinistra in Fig.7 e rampa unitaria, rappresentato a destra nella stessa figura.
Per integrare il gradino ricavandone la rampa è sufficiente conoscerne i valori
fino all’ istante attuale, mentre il calcolo della derivata della rampa all’ istante
0 è un’ operazione non causale, in quanto per eseguire il limite destro (e quindi
ricostruire la discontinuità del gradino) occorre conoscere valori futuri.
y(t) =
8
1
1
1
0
t
0
t
Figura 7: Gradino unitario e rampa unitaria.
3.3
Sistemi lineari e non lineari
Un sistema a tempo continuo descritto dall’ equazione (2), si dice lineare se,
essendo
y1 (·) = F x1 (·) ,
y2 (·) = F x2 (·)
vale la relazione
α1 y1 (·) + α2 y2 (·) = F α1 x1 (·) + α2 x2 (·)
per ogni coppia di numeri reali α1 , α2 . La definizione di linearità per un
sistema a tempo discreto descritto dall’ equazione (3) è del tutto analoga.
Un sistema che non sia lineare si dice non lineare.
Esempi: i sistemi (4), (5), (6), (8), (9), (10), (11), (12), (13) sono lineari,
mentre il sistema (7) è non lineare.
3.4
Sistemi stazionari e non stazionari
Un sistema a tempo continuo si dice stazionario o tempo invariante se una
traslazione nel tempo in anticipo o in ritardo del segnale di ingresso produce
la stessa traslazione nel tempo del segnale di uscita, cioè se
y(t − t0 ) = F x(t − t0 ) ,
t ∈ (−∞, ∞)
per ogni valore reale di t0 , positivo o negativo. Un sistema che non sia
stazionario si dice non stazionario o tempo variante. Analogamente, per un
sistema a tempo discreto la stazionarietà corrisponde alla relazione
ỹ(k − k0 ) = F x̃(k − k0 ) ,
k ∈ (−∞, ∞)
per ogni valore intero di k0 , positivo o negativo.
Esempi: i sistemi (4), (5), (7), (8), (9), (10), (11), (12), (13) sono stazionari,
mentre il sistema (6) è non stazionario.
9
3.5
Sistemi stabili e instabili ingresso limitato-uscita
limitata
Un sistema a tempo continuo si dice stabile ingresso limitato-uscita limitata
(i.l.u.l.) se per ogni costante reale k1 tale che il segnale di ingresso soddisfi
la relazione
|x(t)| ≤ k1 ,
t ∈ (−∞, ∞)
esiste una costante reale k2 tale che il corrispondente segnale di uscita soddisfa
la relazione
|y(t)| ≤ k2 ,
t ∈ (−∞, ∞)
Un sistema che non sia stabile i.l.u.l. si dice instabile ingresso limitato-uscita
limitata. Nel caso dei sistemi a tempo discreto la definizione di stabilità
i.l.u.l. è del tutto analoga.
Esempi: i sistemi (4), (5), (7), (8), (9), (10), (11), (13) sono stabili i.l.u.l.,
mentre i sistemi (6), (12) sono instabili i.l.u.l.
3.6
Lo stato iniziale dei sistemi dinamici causali
In molti casi il comportamento dei sistemi dinamici causali viene analizzato
a partire da un certo istante, in genere l’ origine 0 dell’ asse tempi. In questi
casi in luogo dei modelli (2), (3) si usano modelli del tipo
y(·) = F s0 , x(·) con x(·), y(·) definite in t ∈ [0, ∞)
(14)
ỹ(·) = F s0 , x̃(·) con x̃(·), ỹ(·) definite in k ∈ [0, ∞)
(15)
in cui s0 indica lo stato iniziale, consistente in un parametro (numero reale,
vettore o funzione) che compendia l’ informazione necessaria per determinare
il comportamento futuro del sistema.
In questi casi si definisce la risposta libera, cioè dovuta al solo stato iniziale,
con segnale di ingresso identicamente nullo
y1 (·) = F(s0 , 0) ,
ỹ1 (·) = F(s0 , 0)
e la risposta forzata, dovuta al solo segnale di ingresso, con stato iniziale
nullo,
y2 (·) = F 0, x(·) ,
ỹ2 (·) = F 0, x̃(·)
Nel caso dei sistemi lineari la risposta è data dalla somma della risposta
libera e della risposta forzata ed entrambe le risposte sono funzioni lineari.
Esempi: il sistema (5) si può descrivere con la relazione
Z t
1
vu (t) = s0 +
vi (τ ) − vu (τ ) dτ ,
t, τ ∈ [0, ∞)
(16)
RC 0
10
con s0 = vu (0). La conoscenza della tensione di carica del condensatore
all’ istante t = 0 equivale pertanto alla conoscenza del segnale di ingresso vi (·)
nell’ intervallo t ∈ (−∞, 0). Il sistema (7) equivale a
ỹ(k) = s0 +
k
X
p
x̃(h) ,
s0 = ỹ(0) , k, h ∈ [0, ∞)
h=0
Il sistema (12) equivale a
Z t
x(τ ) dτ ,
y(t) = s0 +
s0 = y(0) , t, τ ∈ [0, ∞)
0
11
4
Analisi spettrale
L’ analisi spettrale permette di caratterizzare un segnale attraverso le sue
frequenze. Gli strumenti utilizzati per trovare il contenuto frequenziale di
un segnale sono lo sviluppo in serie in serie di Fourier e la trasformata di
Fourier , rispettivamente per i segnali periodici e i segnali aperiodici, definiti
in t ∈ (−∞, ∞). Dalla trasformata di Fourier si deduce la trasformata di
Laplace, per segnali definiti in t ∈ [0, ∞), di largo impiego nello studio dei
sistemi causali il cui segnale di uscita dipende sia dalla funzione applicata
all’ ingresso sia dallo stato iniziale.
4.1
Rappresentazione della serie
esponenti complessi o polare
di
Fourier
con
Lo sviluppo in serie di Fourier di una funzione x(t) periodica di periodo T
continua a tratti e a valori complessi corrisponde ad un cambio di coordinate
dal dominio del tempo al dominio delle frequenze. Come nel caso dello
sviluppo in serie di Taylor, lo sviluppo in serie di Fourier rappresenta un
cambio di coordinate in cui la base è rappresentata da funzioni, cioè la
funzione oggetto è espressa da una combinazione lineare di altre funzioni
ϕn (t), n ∈ Z, in genere a valori complessi, che si suppongono ortogonali, cioè
soddisfacenti la proprietà
Z
ϕn (t) ϕ∗m (t)dt = T δnm
(17)
T
in cui con ϕ∗ si indica il coniugato del numero complesso ϕ e con δnm , si indica
il simbolo di Kronecker , che per definizione vale 1 se n = m, 0 se m 6= n.
La (17) è soddisfatta dalle funzioni
ϕn (t) = ejnΩt ,
con Ω =
2π
T
Infatti in questo caso è
ϕn (t) ϕ∗m (t) = ej(n−m)Ωt = cos(n − m)Ωt + j sin(n − m)Ωt
funzione manifestamente uguale ad 1 per n = m e periodica di periodo T , il
cui integrale in T vale pertanto T per n = m e 0 per n 6= m. Lo sviluppo in
serie di Fourier della funzione x(t) è espresso dalla relazione
x(t) =
∞
X
n=−∞
12
cn ejnΩt
(18)
in cui i coefficienti cn si calcolano con le relazioni
Z
1
x(t) e−jnΩt dt
cn =
T T
(19)
che si deducono moltiplicando per e−jmΩt /T ambo i membri della (18) e
integrando nel periodo:
Z
Z
∞
∞
X
1
1 X
jnΩt −jmΩt
−jmΩt
cn e
e
dt =
cn δnm = cm
x(t) e
dt =
T T
T n=−∞
T
n=−∞
Le (18) e (19) si dicono equazione di sintesi ed equazione di analisi . I
coefficienti ck sono numeri complessi, detti coefficienti complessi di Fourier.
Nel caso in cui il segnale sia reale vale la relazione
cn = c∗−n
(20)
Consideriamo ora il valore efficace, partendo dalla definizione data in precedenza, e dimostriamo il teorema di Parseval , che lega la potenza media o
valore efficace ai coefficienti della serie di Fourier:
Z
∞
X
1
2
(21)
|x(t)| dt =
|cn |2
T T
n=−∞
che si dimostra con i seguenti passaggi
Z
Z
∞
X
1
1
2
|x(t)| dt =
cn c∗m ejnΩt e−jmΩt dt
P =
T T
T T n,m=−∞
Z
∞
1 X
∗
jnΩt −jmΩt
=
cn cm
e
e
dt
T n,m=−∞
T
=
∞
X
n,m=−∞
4.2
cn c∗m δnm
=
∞
X
|cn |2
n=−∞
Rappresentazione della serie di Fourier in forma
trigonometrica o cartesiana
Si considera il caso in cui la funzione x(t) sia reale, caso in cui è soddisfatta
la (20). Si noti che nello sviluppo (18) il termine corrispondente ad n = 0,
che si può scrivere
Z
1
c0 =
x(t) dt
T T
13
rappresenta il valor medio nel periodo, mentre le coppie corrispondenti ciascuna ad un dato valore di n ed al suo opposto danno luogo a termini in seno
e coseno dei tipi an cos nΩt e bn sin nΩt. Infatti per ciascuna di tali coppie
valgono le relazioni
c−n e−jnΩt + cn ejnΩt = (Re cn − j Im cn ) (cos nΩt − j sin nΩt) +
(Re cn + j Im cn ) (cos nΩt + j sin nΩt)
= 2 Re cn cos nΩt − 2 Im cn sin nΩt
mentre la (19) si può scrivere
1
cn = Re cn + j Im cn =
T
Z
T
1
x(t) cos nΩt dt − j
T
Z
x(t) sin nΩt dt
T
Posto
a0 = 2 c 0 ,
an = 2 Re cn ,
bn = −2 Im cn ,
(n > 0)
(22)
si deduce immediatamente la forma trigonometrica dello sviluppo in serie di
Fourier, le cui equazioni di sintesi e analisi sono
∞
a0 X
x(t) =
+
an cos nΩt + bn sin nΩt
2
n=1
2
an =
T
Z
T
2
x(t) cos nΩt dt , bn =
T
Z
x(t) sin nΩt dt (n ≥ 0)
(23)
(24)
T
Questo tipo di rappresentazione mostra con chiarezza le propietà che hanno
gli sviluppi in serie di segnali pari e dispari; un segnale pari può essere
sviluppato in serie di soli coseni:
∞
a0 X
x(t) =
+
an cos nΩt
2
n=1
Analogamente, un segnale periodico dispari si sviluppa come somma di soli
seni:
∞
X
x(t) =
bn sin nΩt
n=1
Altro vantaggio di questa rappresentazione è la possibilità di scomporre il
segnale nella somma di un segnale pari ed un segnale dispari. Utilizzando
questa propietà si possono caratterizzare i segnali reali pari e dispari sviluppati in serie polare: un segnale pari avrà coefficienti cn reali, mentre uno
dispari avrà coefficienti immaginari puri, con cn = − c−n .
14
La potenza media in questo caso è data da
∞
P =
4.3
a20 X 2
+
an + b2n
4
n=1
(25)
Rappresentazione della serie di Fourier in forma
armonica
Questa rappresentazione è adatta a rappresentare solamente segnali reali.
Essa mette in evidenza con chiarezza ampiezza Cn e angolo di fase ϑn della nesima armonica. C0 è detta componente continua, mentre la prima armonica
è detta fondamentale. Le equazioni di sintesi ed analisi sono rispettivamente
x(t) = C0 +
∞
X
Cn cos(nΩt − ϑn )
(26)
n=1
C0 =
a0
,
2
Cn =
p
a2n + b2n ,
ϑn = arg(an + j bn )
(27)
e la potenza media è
∞
X
P =
Cn2
(28)
n=0
La (26) si ricava applicando relazione trigonometrica
cos α cos β + sin α sin β = cos (α − β)
alla (23), considerando che le (27) esprimono le relazioni
an = Cn cos ϑn ,
bn = Cn sin ϑn
Una forma armonica equivalente alle (26), (27) è
x(t) = C0 +
∞
X
Cn sin(nΩt + ϕn )
n=1
C0 =
a0
,
2
Cn =
p
a2n + b2n ,
15
ϕn = arg(bn + j an )
4.4
La trasformata di Fourier
Si applichi lo sviluppo in serie (18) ad una funzione periodica f (t) a valori
reali o complessi, si ponga F (nΩ) = cn (funzione discreta con periodo Ω della
pulsazione continua ω) e si applichi il fattore 1/T . Contemporaneamente si
applichi il fattore T alla (19), ottenendo le relazioni
∞
1 X
f (t) =
F (nΩ) ejnΩt
T n=−∞
F (nΩ) =
(29)
T /2
Z
f (t) e−jnΩt dt
(30)
−T /2
che sono, ovviamente, anch’ esse legate dalla proprietà di biunivocità. Si
suppone che la funzione f (t), non necessariamente periodica, sia ad energia
finita, cioè che soddisfi la condizione
Z ∞
|f (t)| dt ≤ M < ∞
(31)
−∞
Posto ω = nΩ, ∆Ω = ω/n = Ω, la (30) si può scrivere
Z π/∆Ω
f (t) e−jωt dt
F (ω) =
−π/∆Ω
e, per ∆Ω → 0 (n → ∞),
F (ω) =
∞
Z
f (t) e−jωt dt
(32)
−∞
mentre la (29), che si può scrivere
f (t) =
∞
1 X
F (nΩ) ejnΩt ∆Ω
2π n=−∞
al limite per ∆Ω → 0 diventa
1
f (t) =
2π
Z
∞
F (ω) ejωt dω
(33)
−∞
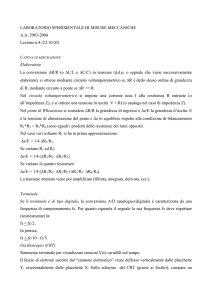
Le (32) e (33) definiscono rispettivamente la trasformata di Fourier e
l’ antitrasformata di Fourier , che si applicano a funzioni impulsive, definite nell’ intervallo t ∈ (∞, ∞), limitate, continue a tratti e ad energia limitata,
16
f
f
e−σc t
0
t
0
a)
1
σc
t
b)
Figura 8: Segnali trasformabili secondo Fourier e secondo Laplace.
cioè soddisfacenti la (31). Un esempio è riportato in Fig.8,a. Il teorema
di Parseval consente di calcolare l’ energia del segnale dalla trasformata di
Fourier. Esso è espresso dalla relazione
Z ∞
Z ∞
1
2
|F (ω)|2 dω
|f (t)| dt =
E=
(34)
2π
−∞
−∞
4.5
La trasformata di Laplace
Si consideri ora una funzione f (t) a valori reali o complessi del tipo rappresentato in Fig.8,b, definita in [0, ∞), continua a tratti, limitata per ogni
valore finito del tempo e tale che esista un numero reale σ̄ per cui è
Z ∞
|f (t)| e−σ̄t dt ≤ M < ∞
(35)
0
Se la (35) è soddisfatta per un dato valore di σ̄, essa è soddisfatta per
ogni valore maggiore di esso. L’ estremo inferiore σc dell’ intervallo (in molti
casi aperto) dei valori di σ̄ per cui la (35) è soddisfatta si dice ascissa di
convergenza di f (t). Sotto tali condizioni la funzione f (t) e−σt ammette
trasformata di Fourier per ogni σ > σc . Tale trasformata di Fourier è
Z ∞
f (t) e(−σ−jω)t dt
(36)
F (σ + jω) =
0
definita nel semipiano del piano complesso Re s > σc . L’ antitrasformata è
Z j∞
1
−σt
f (t) e
=
F (σ + jω) ejωt dω
2π −j∞
cioè
1
f (t) =
2π
Z
j∞
F (σ + jω) e(σ+jω)t dω
−j∞
17
e, operando il cambio di variabili s = σ + jω,
1
f (t) =
2πj
Z
σ0 +j∞
F (s) est ds
(37)
σ0 −j∞
in cui l’ integrale nel piano complesso si intende eseguito lungo una retta parallela all’ asse imaginario, di ascissa σ0 , contenuta nel semipiano di convergenza. Lungo tale retta si ha ds = dσ + jdω = jdω. La trasformata di Laplace
di f (t) è definita dalla (36), che si può scrivere nella forma più compatta
F (s) =
Z
∞
f (t) e−st dt
0
mentre la (37) definisce l’ antitrasformata di Laplace di F (s).
18
(38)