Corso di Fisica tecnica e ambientale – a.a. 2011/2012 - Docente: Prof. Carlo Isetti
CAPITOLO 2
CENNI DI CINEMATICA
2.1 GENERALITÀ
La cinematica studia il moto dei corpi in relazione allo spazio ed al tempo
indipendentemente dalle cause che lo producono. Un corpo si muove quando la sua posizione
relativa ad un punto di riferimento fisso varia nel tempo.
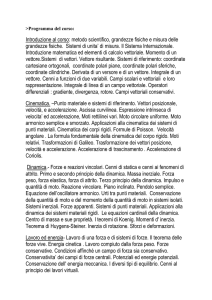
Si consideri un corpo, supposto puntiforme (punto materiale), che si sposta nello
spazio rispetto ad un sistema di coordinate
cartesiane, secondo la curva rappresentata in
figura (traiettoria).
Il corpo si trovi nel punto A in un certo
istante 1, la sua posizione è individuata dal
vettore r1 OA . All'istante 2 il corpo si trova in
B, dopo aver percorso la traiettoria rappresentata
in figura. La sua posizione è ora individuata dal
vettore r2 OB . Lo spostamento del corpo r AB è evidentemente pari a OB OA , ed è
definito da:
un valore numerico proporzionale alla lunghezza del segmento AB;
una direzione coincidente con la retta a cui appartiene il segmento AB;
un verso (da A a B).
Lo spazio percorso risulta pari alla lunghezza dell'arco di traiettoria compreso tra A e B.
2.2 VELOCITÀ
La velocità di un corpo è definita come la variazione della sua posizione nel tempo:
considerando il vettore spostamento AB, si definisce come velocità media del corpo tra A e B
il seguente rapporto:
CAPITOLO 2
Cenni di cinematica
Corso di Fisica tecnica e ambientale – a.a. 2011/2012 - Docente: Prof. Carlo Isetti
AB
wm
Ove: = 2 - 1 rappresenta l' intervallo di tempo impiegato per andare da A a B.
La velocità così definita corrisponde alla velocità media tenuta nell'intero percorso tra
A e B, in quanto essa non tiene in alcun conto le eventuali variazioni di velocità che si
possono essere verificate nel percorso stesso.
La velocità è una grandezza vettoriale (rapporto di un vettore per uno scalare)
caratterizzata da:
modulo: pari alla lunghezza dello spostamento AB diviso l’intervallo di tempo;
direzione: uguale a quella del vettore AB ;
verso: da A a B.
La velocità è dimensionalmente espressa come una lunghezza diviso un tempo; se si
esprime la lunghezza in metri ed il tempo in secondi (sistema S.I.), l'unità di misura della
velocità è il metro al secondo [m/s].
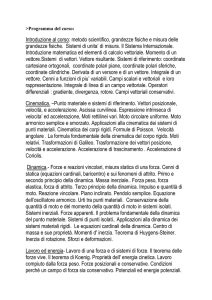
Si considerino ora, in riferimento alla figura a fianco, le
posizioni intermedie del corpo sull traiettoria B1, B2, .., Bn
sempre
più
prossime ad A.. Si
osservi
come
i
corrispondenti vettori AB n tendano ad assumere la
direzione della tangente alla traiettoria nel punto A per B
A o (lo stesso per 0).
Si definisce quindi come velocità istantanea w su una traiettoria qualsiasi:
AB ds
w lim
0
d
dove ds rappresenta lo spazio infinitesimo percorso nell' istante d .
Si noti che la direzione di w sarà eguale a quella della tangente alla traiettoria nel
punto A; il verso sarà quello secondo il quale la traiettoria è percorsa.
2.3 ACCELERAZIONE
Quando la velocità di un corpo varia in modulo o in direzione, o verso, si ha
un'accelerazione. L'accelerazione media di un corpo che si muove da A a B con velocità
CAPITOLO 2
Cenni di cinematica
Corso di Fisica tecnica e ambientale – a.a. 2011/2012 - Docente: Prof. Carlo Isetti
iniziale w 1 in A e w 2 in B (rispettivamente al tempo 1 e 2) rappresenta la rapidità di
variazione della velocità nel tempo e può essere espressa nel modo seguente:
w 2 w 1 w
am
2 1
Anche l' accelerazione, come la velocità, è un vettore e la sua direzione è uguale a
quella di w . L' accelerazione è dimensionalmente espressa come una velocità diviso un
tempo; in unità S.I. l'unità di misura dell'accelerazione è il metro al secondo quadrato [m/s 2]
che corrisponde all'accelerazione media di un corpo che varia la sua velocità di un metro al
secondo nell'intervallo di tempo di un secondo. L'accelerazione istantanea è definita come la
variazione di velocità tra due istanti molto vicini, e quindi:
w dw
a lim
0
d
2.4 MOTO RETTILINEO UNIFORME
Sulla base delle precedenti definizioni, si può osservare che nel caso di moto su una
traiettoria curva, si verifica sempre una variazione di velocità, anche se il modulo di essa
rimane costante; ciò in quanto il vettore velocità cambia continuamente in direzione. Il solo
moto in cui non si ha variazione di velocità, nè in modulo, nè in direzione e verso è detto
moto rettilineo uniforme. Esso è un caso particolare del moto rettilineo vario, che è
caratterizzato da velocità diverse ad istanti di tempo diversi.
Nel moto rettilineo uniforme, qualunque sia l'intervallo di tempo relativamente al
quale si valuta la velocità media, questa risulta sempre costante e pari alla velocità istantanea.
Considerando solo i moduli si può scrivere: w w m
s ds
d
integrando nell' intervallo x1 - xo = s (w = cost) l'espressione ds = w d risulta:
x1
1
x0
0
ds w d
si ottiene:
x1 - xo = s = w (1 - 0)
posto o= 0 (istante iniziale) e 1= si può scrivere anche:
s=w
CAPITOLO 2
Cenni di cinematica
Corso di Fisica tecnica e ambientale – a.a. 2011/2012 - Docente: Prof. Carlo Isetti
2.5 MOTO RETTILINEO UNIFORMEMENTE ACCELERATO
Un altro caso particolare di moto rettilineo vario è rappresentato dal moto in cui la
variazione della velocità nel tempo è uniforme; in questo caso si dice che il moto è
uniformemente accelerato.
w
am
cos t.
dw
a
cos t.
d
Risulta, quindi, costante il rapporto:
l'accelerazione istantanea è anch'essa costante:
r
ed ha la stessa direzione di w .
a
Considerando solo i moduli risulta:
dw
a d = dw
d
ed integrando tra o= 0 e 1 = e le corrispondenti velocità wo e w, si ha:
w
a d dw
w
0
0
a = w - wo
Lo spazio percorso s è esprimibile come:
s = x - xo = wm
ove con wm si è indicata la velocità media del moto:
wm= (w + wo)/ 2
Si può scrivere, allora:
s = wm = (w + wo)/2
e poichè la velocità istantanea è:
w = wo + a
risulta:
s
w 0 a w
1
w 0 a 2
2
2
e cioè lo spazio percorso è una funzione di wo , a, : s = f (wo , a, )
Sostituendo nell' espressione = (w - wo)/a si ottiene anche:
s
1
w 2 w 20
2a
w2 = wo2 + 2 a s
che esprime la velocità w del punto materiale come w = f (wo, a, s).
CAPITOLO 2
Cenni di cinematica
Corso di Fisica tecnica e ambientale – a.a. 2011/2012 - Docente: Prof. Carlo Isetti
Un esempio di moto uniformemente accelerato è rappresentato dalla caduta libera di
un oggetto almeno fino a quando sono trascurabili gli effetti dovuti alla resistenza dell'aria.
Sulla superficie terrestre l'accelerazione di un corpo che cada liberamente risulta
pressochè costante; questa accelerazione è detta accelerazione di gravità e viene usualmente
indicata con il simbolo "g" che assume un valore numerico (modulo) pari a: g = 9.81 m/s2 .
ESEMPIO
Un oggetto viene lasciato cadere dal tetto di un palazzo. Se la durata della sua caduta è pari a
tre secondi, si valuti l'altezza del palazzo e la velocità finale dell'oggetto espressa in km/h.
Soluzione
Ponendo l'origine dell'asse x coincidente con il tetto dell'edificio, l'altezza h del
palazzo coincide con lo spazio percorso nel tempo = 3 s ; si ha quindi:
1
1
1
h w 0 g 2 g 2 9.81 (3) 2 44 (m)
2
2
2
essendo la velocità iniziale wo = 0
Per valutare la velocità finale si può utilizzare l’espressione:
w w 0 g g 9.81 3 29.4 (m / s)
ricordando che:
1 (km) = 1000 (m) => 1 m = 10-3 (km)
1 ( h) = 3600 (s) => 1 (s) = 1/3600 (h)
risulta:
w 29.4
10 3 km
105.8 (km/h)
1/3600 h
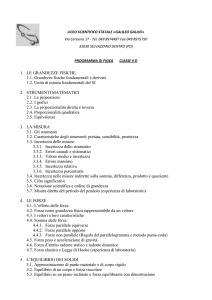
Accelerazione su traiettoria curvilinea
Se un corpo si muove su traiettoria curvilinea, la velocità cambia continuamente
direzione e quindi, considerando il vettore w , questo non rimarrà costante, e di conseguenza
neppure l'accelerazione. Anche nel caso che la velocità si mantenga costante in modulo, non si
può affermare che il vettore velocità sia costante. Si ha quindi comunque un'accelerazione, già
definita come variazione nel tempo del vettore velocità, che, dalla definizione, sarà diretta
come w . Si può quindi realizzare la situazione riportata in figura ove l'accelerazione a
risulta orientata in una direzione che non coincide con la direzione della traiettoria.
CAPITOLO 2
Cenni di cinematica
Corso di Fisica tecnica e ambientale – a.a. 2011/2012 - Docente: Prof. Carlo Isetti
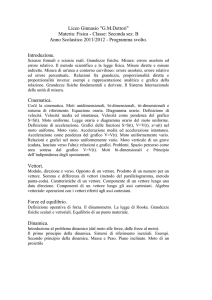
Moto circolare uniforme
Una particolare traiettoria curvilinea è quella circolare; se si considera il moto di un
corpo in movimento con velocità uniforme su una traiettoria circolare (vedi figura) si avrà
comunque un'accelerazione dovuta alla variazione della direzione della velocità. Per trovare la
direzione del vettore accelerazione si ricorda che:
w dw
a lim
0
d
Come si può facilmente osservare in figura per 0 il vettore w dw e cioè tende a
essere perpendicolare al vettore velocità w che è tangente alla traiettoria. Considerando
infatti, in riferimento alla figura, intervalli progressivamente minori, si ha che il
corrispondente vettore w tende ad orientarsi verso il centro della circonferenza e quindi in
una direzione perpendicolare alla traiettoria. Poichè il vettore accelerazione è caratterizzato
dalla stessa direzione e verso (verso il centro), si usa parlare in questi casi di accelerazione
centripeta.
CAPITOLO 2
Cenni di cinematica
Corso di Fisica tecnica e ambientale – a.a. 2011/2012 - Docente: Prof. Carlo Isetti
Il modulo di a può essere valutato facilmente in riferimento alle figure. Nel punto 1,
, all'istante , è . Il corpo ha percorso una
all'istante 1, la velocità è rappresentata da w
1
2 w2
distanza s sulla circonferenza maggiore del segmento z.
Poichè il modulo dei vettori velocità è uniforme il triangolo formato dai due raggi R e
, e w
da z è simile al triangolo formato da w
.
1 w2
z w
z
Risulta quindi:
w w
R
w
R
a lim
Il modulo dell' accelerazione è:
0
w
w z w
z
lim
lim
0
0
R R
E, poichè per 0 il segmento z tende all'arco s, risulta:
w
z w
s w 2
a lim
lim
R 0 R 0 R
Per descrivere il moto circolare uniforme sono frequentemente utilizzate espressioni
della velocità e dell'accelerazione in funzione dell'angolo"spazzato" dal punto materiale sulla
circonferenza.
Considerando un punto di partenza O sulla circonferenza, (origine) la posizione
angolare del punto P rispetto a tale punto sia, ad esempio, definita dal valore dell' angolo.
In generale, si misura l'angolo in radianti e cioè come
rapporto, adimensionale, tra l'arco x ed il raggio R: risulta, quindi,
= x/R.
L'angolo ' che corrisponde ad un arco pari all'intera
circonferenza, e cioè l'angolo giro, vale: ' = 2R/R = 2 rad
Si consideri ora un corpo in moto lungo la traiettoria circolare il quale occupi
all'istante o la posizione angolare o e all'istante 1 la posizione 1. Si può definire una
velocità angolare media m:
m
1 0
1 0
[1/s] oppure [rad/s]
Supponiamo di considerare un moto circolare uniforme e cioè =
cost. Se conveniamo di misurare gli angoli e i tempi a partire da o= 0
e o=0 si può scrivere:
0
[rad/s]
0
CAPITOLO 2
Cenni di cinematica
Corso di Fisica tecnica e ambientale – a.a. 2011/2012 - Docente: Prof. Carlo Isetti
e quindi, indicando con T il tempo necessario per compiere un giro completo ' = 2 rad:
= '/T =2/T
Il tempo T è definito periodo del moto; si definisce inoltre la frequenza f del moto
(numero di giri nell'unità di tempo) come l'inverso del periodo: f = 1/T.
Se un oggetto si muove con velocità angolare uniforme lungo una traiettoria circolare,
il modulo della velocità lineare w è esprimibile nel modo seguente:
w
2R
R
2 /
[m/s]
Mentre per il modulo dell' accelerazione, risulta:
a
w 2 2 R 2
2 R
R
R
[m/s2]
ESEMPIO
Un oggetto si muove con velocità lineare costante pari ad 80 (km/h) lungo una pista circolare
di 2 km di diametro. Determinare la velocità angolare ed il periodo del moto.
Soluzione
Trasformando per prima cosa i dati nel sistema S.I., si ha:
w = 80 km/h = 80 • 1000/3600 (m/s) = 22.2 (m/s)
R = 1 km = 1000 m
La velocità angolare ed il periodo del moto T, risultano:
w 22.2 m / s
0.022 1/s oppure rad/s
R
1000m
T = 2/ = 283 (s)
In generale, se si considera un moto curvilineo in cui la velocità rimane costante in
modulo, a è sempre perpendicolare a w e diretta verso l'interno della traiettoria.
Nel caso di moto circolare uniforme, come già visto, il modulo di a è costante,
mentre in generale questo non si verifica più nel caso di un generico moto curvilineo con
velocità lineare uniforme (w = cost.).
In questo caso, infatti, il modulo di a varia, risultando minore nei tratti a minore raggio di
curvatura e maggiore nel caso opposto, come rappresentato in figura.
CAPITOLO 2
Cenni di cinematica
Corso di Fisica tecnica e ambientale – a.a. 2011/2012 - Docente: Prof. Carlo Isetti
In generale, per un moto curvilineo qualuque con velocità lineare variabile l'accelerazione
potrà essere sempre scomposta in due componenti: una tangenziale ed una radiale (o normale)
diretta secondo il raggio di curvatura della traiettoria; la prima è legata alla variazione del
modulo della velocità lineare (sulla traiettoria), la seconda è legata alla variazione della
direzione della velocità stessa.
CAPITOLO 2
Cenni di cinematica