")
Precorso di Analisi Matematica 1
(v.1.2.1)
Fabio Giannoni
1
1
versione (1.2) curata da Roberto Giambò
Indice
Introduzione (alla versione 1.1)
Introduzione alla versione 1.2
Correzioni alle versioni successive
5
6
6
Capitolo 1. Alcuni richiami: insiemi, relazioni e funzioni
1.1. Insiemi
1.2. Relazioni
1.3. Funzioni
7
7
11
13
Capitolo 2. Insiemi numerici
2.1. I numeri naturali
2.2. I numeri relativi
2.3. I numeri razionali
2.4. I numeri reali
17
17
20
21
25
Capitolo 3. Polinomi, radici, intervalli, moduli
3.1. Intervalli
3.2. Polinomi
3.3. Radici n-esime
3.4. Valore assoluto
27
27
28
32
33
Capitolo 4. Equazioni e disequazioni algebriche
4.1. Equazioni di secondo grado
4.2. Disequazioni di secondo grado
4.3. Radici razionali
4.4. Disequazioni biquadratiche
4.5. Equazioni di quarto grado reciproche
4.6. Disequazioni razionali
4.7. Disequazioni con il valore assoluto
4.8. Disequazioni irrazionali
35
35
37
39
40
41
45
48
51
3
INDICE
4
Capitolo 5. Funzioni esponenziali e logaritmiche
5.1. Funzione esponenziale
5.2. Funzione logaritmica
5.3. Disequzioni logaritmiche
5.4. Disequazioni esponenziali
5.5. Disequazioni trascendenti: ulteriori esempi
55
55
61
65
67
68
Capitolo 6. Elementi di trigonometria
6.1. Funzioni trigonometriche
6.2. Equazioni trigonometriche
6.3. Disequazioni trigonometriche
70
70
88
94
Capitolo 7. Principio di Induzione e Binomio di Newton
7.1. Binomio di Newton e somme di potenze.
97
100
Capitolo 8.
Brevi richiami di geometria analitica ed euclidea
105
Capitolo 9. I numeri complessi
Motivazioni
9.1. Definizione dei numeri complessi
9.2. Rappresentazione algebrica dei numeri complessi
9.3. Forma trigonometrica (o polare) dei numeri complessi
108
108
109
110
118
Introduzione (alla versione 1.1)
Queste note1 hanno lo scopo di fornire i prerequisiti che gli studenti debbono conoscere gli studenti del primo anno di matematica
e fisica per poter seguire con profitto il corso di Analisi Matematica
1.
Prima di iniziare questo precorso siete stati sottoposti ad un test
con lo scopo di provare il livello delle vostre conoscenze e consigliare
fortemente di seguire queste lezioni a chi il test non l’ha superato.
Io invece CONSIGLIO A TUTTI QUANTI di seguire questo
precorso perché vi farà bene.
Ma quello che importa di più è che lo seguiate, interrompendo
il docente quando c’è qualcosa che non vi è chiaro. E riguardando
a casa le cose che sono state dette durante la lezione. E’ questo il
primo passo per poter seguire piú agevolmente le lezioni del corso
di Analisi 1.
Buon lavoro.
Ringraziamenti. Vorrei ringraziare gli studenti del primo anno dei corsi di laurea di Matematica e di Fisica, anno accademico
2012/13, per la loro partecipazione attiva alle lezioni del precorso. In
particolare le studentesse Ilaria Giancamilli ed Elena Raponi per come hanno preso gli appunti che sono stati la base per scrivere queste
note. Ed anche tutti gli studenti e studentesse che sono intervenuti
ripetutamente con domande quando non era loro chiaro qualcosa.
Tra tutti spicca la studentessa Valentina Macchiati che si può proprio
dire che non me ne ha lasciata passare una e con le sue domande è
stata di aiuto a tutti.
1
il testo di questa introduzione è stato leggermente modificato rispetto alla
versione precedente.
5
Un ringraziamento particolare alla dottoressa Claudia Vannucchi che è stato tutor per il corso di Analisi Matematica 1 e che ha
trasformato gli appunti in un testo scorrevole.
Camerino, settembre 2013
Fabio Giannoni
Introduzione alla versione 1.2
Questa nuova versione del precorso di matematica per studenti
di Matematica e Fisica rivede ed integra quella già curata da Fabio
Giannoni, titolare del corso di Analisi Matematica 1 negli a.a. 2012–
2015. In particolare è stata leggermente rivista la parte sulle relazioni
tra insiemi, introducendo qualche definizione in più, e quella sulle
funzioni esponenziali. È cambiata anche la numerazione dei capitoli. Alcune sviste ed imprecisioni sono state corrette e senza dubbio
molte rimangono ancora da correggere: invito tutti gli studenti che
lo vorranno fare (e che ringrazio fin d’ora) a segnalarmele, di persona
o via email.
Camerino, ottobre 2015
Roberto Giambò
Correzioni alle versioni successive
vers. 1.2.1 – sezione 6.2.3 (pag. 91), Proprietà 7.3.
CAPITOLO 1
Alcuni richiami: insiemi, relazioni e funzioni
In questo primo capitolo, vengono richiamati sinteticamente alcuni concetti e nozioni relativi alla teoria degli insiemi e alle funzioni,
argomenti che saranno utili in seguito.
1.1. Insiemi
Ricordiamo che i matematici chiamano insieme una qualsiasi raccolta di oggetti. Questi vengono detti elementi e si dice che appartengono all’insieme. Di solito gli insiemi si indicano con una lettera
maiuscola ed i suoi elementi con lettere minuscole. Con la scrittura
a∈A
si intende dire che l’elemento a appartiene all’insieme A. Invece con
la scrittura a < A si intende che l’elemento a non appartiene ad A.
Indicheremo con ∅ l’insieme vuoto, ossia l’insieme privo di elementi.
Inoltre N, Z, Q, R indicheranno rispettivamente gli insieme dei numeri naturali, interi, razionali, reali (sui quali torneremo nel Capitolo
2).
Spesso un insieme può essere descritto mediante una proprietà che
caratterizza i suoi elementi. In altre parole se P(x) è una proprietà
che risulta vera o falsa a seconda di chi è x, a partire da essa si può
descrivere l’insieme di tutti gli elementi tali che la proprietà P è vera,
e tale insieme si rappresenta nel seguente modo:
{x : P(x) è vera} ,
o semplicemente {x : P(x)}.
7
Esempio 1.1. Se n ∈ N, consideriamo la proprietà
P(n) : ”n è divisibile per 2”.
L’insieme
{n : P(n) è vera},
è l’insieme dei numeri pari. I due punti (”:”) si leggono: ”tali che” o
”tale che” a seconda dei casi.
Definiamo ora le principali operazioni con gli insiemi. Gli insiemi
unione, intersezione e differenza sono definiti rispettivamente da
A ∪ B = {x : x ∈ A ∨ x ∈ B} ,
A ∩ B = {x : x ∈ A ∧ x ∈ B}
A \ B = {x : x ∈ A ∧ x < B} .
Si dice anche che A \ B è il complementare di B rispetto ad A. Il
simbolo ∨ si legge ”oppure” con il significato del vel latino, mentre il
simbolo ∧ si legge ”e”, (et latino).
Definiamo adesso le seguenti relazioni tra insiemi. Dati due insiemi A e B, si dice che A è sottoinsieme di B se ogni elemento di A
appartiene anche a B . In simboli
A⊆B
⇐⇒
(x ∈ A ⇒ x ∈ B).
Il simbolo ⇒ indica una conseguenza logica. La scrittura P(x) ⇒ Q(x)
si legge: se P(x) è vera allora Q(x) è vera. Invece il simbolo ⇐⇒ indica
una equivalenza logica. La scrittura P(x) ⇐⇒ Q(x) si legge: P(x) è
vera se e solo se Q(x) è vera.
Diciamo che due insiemi A e B sono uguali se hanno gli stessi
elementi, cioè se ogni elemento di A appartiene a B ed ogni elemento
di B appartiene ad A . In simboli:
A=B
⇐⇒
(A ⊆ B) ∧ (B ⊆ A) .
Notazione 1.2. Useremo anche i seguenti connettivi logici. Il
simbolo ∀ significherà “per ogni ”, mentre il simbolo ∃ significherà
“esiste ”.
8
Osservazione 1.3. Nella lingua parlata gli elementi costitutivi sono le proposizioni. Cosı̀ è anche in matematica. Ad esempio sono
proposizioni
• 2·3=6
• ∃n ∈ N : n è divisibile per 2
• n ∈ N è divisibile per 2 ∀n ∈ N.
sono proposizioni nel linguaggio matematico. Però a differenza della
lingua parlata le proposizioni in matematica possono avere un solo
valore di verità: vero o falso. Ad esempio la prima e la seconda
proposizione sono vere, mentre la terza è falsa. Una proposizione
può essere vera o falsa, non ci sono altre possibilità. D’altra parte non
tutte le proposizioni del linguaggio parlato sono una proposizione
nel linguaggio matematico (ad esempio ”Questa frase è falsa”, non
è una proposizione perché se suppongo che è vera allora è falsa e
viceversa). A titolo esemplificativo, la seguente proposizione
“∀n ∈ N,
n è divisibile per 2 “
risulta falsa.
Oltre alle proposizioni in matematica sono fondamentali le relazioni (o predicati) che possono dipendere da una o più variabili.
Quando non ci sono ”entità” variabili si parla di proposizioni. Abbiamo già incontrato un esempio di predicato nell’esempio 1.1; ora
consideriamo il predicato R(x), dipendente dalla variabile x ∈ R e
definito come segue:
x2 − 1 > 0
o il predicato binario (cioè dipendente da due variabili) S(x, y), dove
x, y ∈ R, e definito da
x + y = 1.
Si verifica che, ad esempio, R(1) è una proposizione falsa, mentre
S(2, −1) è una proposizione vera. Vediamo ora altri esempi; tra poco
torneremo sulle relazioni binarie, dandone una definizione rigorosa.
Esempio 1.4. La seguente proposizione
∀n ∈ N n dispari
9
⇒
n2 pari
è falsa.
Esempio 1.5. Siano
p(n) :
n dispari
q(n) :
n2 dispari .
Allora le seguenti proposizioni
p(n)
⇒
q(n) ∀n ∈ N ,
p(n)
⇔
q(n) ∀n ∈ N ,
sono vere.
Osservazione 1.6. Sia A ⊂ R .
∀x ∈ A,
p(x)
⇒
q(x)
NON q(x)
⇒
NON p(x) .
equivale a dire
∀x ∈ A,
Siano p(x) , q(x) proprietà qualsiasi. La negazione di
p(x) ∧ q(x)
è data da
NON p(x) ∨ NON q(x) ,
mentre la negazione di
p(x) ∨ q(x)
è data da
NON p(x) ∧ NON q(x) .
Notazione 1.7. Per semplicità, inseguito indicheremo ’NON p(x)’
con ’p̃(x)’ .
La negazione di
∀x,
p(x) è vera
è
∃ x : p̃(x) .
La negazione di
∃x,
p(x) è vera
10
è
∀x,
p̃(x) .
La negazione di
∀x,
p(x)
⇒
q(x)
è
∃x :
p(x) ∧ q̃(x) .
Di seguito esponiamo due importanti proprietà che coinvolgono
le operazioni di intersezione ed unione.
Esercizio 1.8. Verificando la doppia inclusione, dimostrare le
seguenti proprietà:
(1) proprietà distributiva dell’unione rispetto all’intersezione
(A ∩ B) ∪ C = (A ∪ C) ∩ (B ∪ C) ;
(2) proprietà distributiva dell’intersezione rispetto all’unione
(A ∪ B) ∩ C = (A ∩ C) ∪ (B ∩ C) .
Concludiamo il paragrafo ricordando al definizione di prodotto
cartesiano. Chiameremo coppia ordinata (x, y) l’insieme dei due
elementi x ed y posti ”in ordine prestabilito”: prima x e poi y. Se
x , y avremo che (x, y) , (y, x). Siano dati due insiemi X ed Y.
Chiameremo prodotto cartesiano di X ed Y l’insieme
X × Y = {(x, y) : x ∈ X ∧ y ∈ Y}.
1.2. Relazioni
Nel prodotto cartesiano sono definite le cosiddette relazioni
binarie.
Definizione 1.9. Una relazione (binaria) R da un insieme X verso
un insieme Y è un predicato che è definito su ogni coppia (x, y) ∈ X×Y.
Se R(x, y) è vera si dice anche che x è in relazione con y e si denota
con xRy. Il grafico della relazione R è il sottoinsieme gr R = {(x, y) ∈
X × Y : R(x, y)} ⊆ X × Y.
11
Il complementare di gr R in X × Y è l’insieme delle coppie per cui
R(x, y) è falsa. In tal caso si dice anche che x non è in relazione con y,
e
e si denota con xRy.
Esempio 1.10. Dati gli insiemi X = {1, 2, 3} e Y={2,3,4} e la relazione
R(x, y) espressa dal predicato “x + y è un numero pari”, abbiamo che,
e Si verifica infatti facilmente che gr R =
ad esempio 1R3, ma 1R4.
{(1, 3), (2, 2), (2, 4), (3, 3)}.
Importanti sono le relazioni in cui X = Y. Si parla allora di
relazione su un insieme X. Una relazione su un insieme X può
godere di alcune interessanti proprietà.
Definizione 1.11. Sia R una relazione su un insieme X. Diciamo
che R è
•
•
•
•
riflessiva, se ∀x ∈ X =⇒ R(x, x);
simmetrica, se ∀x, y ∈ X : R(x, y) =⇒ R(y, x);
antisimmetrica, se ∀x, y ∈ X : R(x, y) ∧ R(y, x) ⇒ x = y
transitiva, se ∀x, y, z : R(x, y) ∧ R(y, z) =⇒ R(x, z).
Inoltre:
una relazione su X che è contemporaneamente riflessiva,
simmetrica e transitiva è detta relazione di equivalenza;
una relazione su X che è contemporaneamente riflessiva,
antisimmetrica e transitiva è detta relazione d’ordine;
una relazione d’ordine si dice totale se, ∀x, y ∈ X =⇒ R(x, y) ∨
R(y, x). In tal caso l’insieme X si dice totalmente ordinato dalla
relazione R.
Esempio 1.12. Sia X l’insieme degli studenti di un certo istituto,
e consideriamo la relazione per cui R(a, b) è vera se e solo se gli
studenti a e b frequentano la stessa classe. Si verifica facilmente che
la relazione è di equivalenza.
Data una relazione di equivalenza su un insieme X, e un elemento
x ∈ X, il sottoinsieme di X
[x]R = {y ∈ X : R(x, y)} ⊆ X
12
è detto classe di equivalenza di x. Non è difficile verificare che le classi di
equivalenza di una relazione di equivalenza formano una partizione
di X, cioè le classi di equivalenza sono a due a due disgiunte e la loro
unione restituisce l’intero insieme X. L’insieme formato dalle classi
di equivalenza è detto insieme quoziente, e si denota con X/R:
X/R = {[x]R : x ∈ X}.
Esempio 1.13. Con riferimento all’esempio 1.12 precedente, la
classe di equivalenza di uno studente a è l’insieme dei suoi compagni
di classe (lui compreso), e l’insieme quoziente è, appunto, l’insieme
delle classi dell’istituto.
1.3. Funzioni
In questo paragrafo richiamiamo il concetto di funzione.
Dati due insiemi non vuoti A e B, una funzione f da A a B, indicata
nel seguente modo
f : A → B,
è una relazione da A verso B che associa ad elemento di A uno ed
un solo elemento di B. Dunque, se a è un elemento di A , tramite la
funzione f corrisponde ad esso l’elemento di b ∈ B indicato con f (a).
In simboli
a ∈ A 7→ f (a) ∈ B .
L’elemento f (a) è detta immagine di a tramite la f , mentre a è la controimmagine di b = f (a). L’inseme A è detto dominio della funzione,
mentre B è chiamato codominio di f .
Esempio 1.14. La seguente funzione
f : N → Q,
f (n) =
2n + 1
,
3
ha come dominio N e come codominio Q , e ad ogni n ∈ N corrisponde (tramite la definizione di f ) uno ed un solo elemento
q = f (n) ∈ Q .
13
Definizione 1.15. Una funzione f definita da un inseme A a un
insieme B si dice iniettiva se, comunque si scelgano due elementi
a1 , a2 ∈ A
a1 , a2
f (a1 ) , f (a2 ) ,
⇒
cioè se ad elementi distinti corrispondono immagini distinte.
Osservazione 1.16. La funzione dell’Esempio 1.14 è iniettiva.
Infatti, se f (n1 ) = f (n2 ) , cioè
2n1 + 1 2n2 + 1
=
3
3
si ha
2n1 + 1 = 2n2 + 1
⇒
2n1 = 2n2
⇒
n1 = n2 .
Definizione 1.17. Sia f una funzione definita da un inseme A a
un insieme B. Si dice che f è suriettiva (o surgettiva) se
∀b ∈ B
∃a ∈ A : f (a) = b ,
cioè se ogni elemento di B è immagine di almeno un elemento di A .
Osservazione 1.18. La funzione dell’esempio 1.14 non è suriettiva
Se lo fosse, infatti, per ogni p ∈ Q , dovrebbe esistere un n ∈ N :
2n+1
= p, cioè
3
2n + 1 = 3p
ovvero
(1.1)
2n = 3p − 1 ;
scegliendo ad esempio p = 12 , non esiste nessun n ∈ N tale per cui la
condizione (1.1) è verificata (infatti si ha 2n = 3 · 21 − 1 = 12 ) .
Invece, la funzione
f : Q → Q , f (r) =
è suriettiva, perché ∀p ∈ Q : p =
f (r) = p.
14
2r+1
3
2r + 1
3
, esiste r =
3p−1
2
∈ Q, tale che
Esempio 1.19. La funzione
f : R → R , f (x) = x2
non è iniettiva, essendo f (x) = f (−x) , e neppure suriettiva, poiché se
y < 0 , f (x) = y , cioè x2 = y , non ha soluzioni.
Tuttavia, se consideriamo la stessa funzione dell’esempio precedente, ma con f : R+ → R+ , abbiamo che essa è sia iniettiva che
suriettiva
Osservazione 1.20. Le precedenti osservazioni ci consentono di
sottolineare che una funzione non è definita solo dalla “legge”, ma è
caratterizzata anche dal suo dominio (insieme di partenza) e dal suo
codominio (insieme di arrivo).
Il simbolo ◦ è descritto nella
Definizione 1.21. Date le funzioni f : A → B , g : B → C , si
definisce la funzione composta
g◦ f :A→C
(si legge ”g composto f”) nel seguente modo: per ogni a ∈ A
def
g ◦ f (a) = g( f (a)) .
Esempio 1.22. Date le funzioni
2n + 1
,
3
g(r) = r2 ,
f : N → Q,
f (n) =
g : Q → Q,
la funzione composta g ◦ f : N → Q è definita da
2n + 1
(g ◦ f )(n) =
3
2
,
∀n ∈ N .
Se A = B la funzione f : A → A tale che f (a) = a si chiama funzione
identica o identità.
15
Definizione 1.23. Se una funzione f : A → B è sia iniettiva che
suriettiva, si dice che è una funzione biunivoca (o invertibile). In tal
caso è definita la funzione inversa
f −1 : B → A
e le funzioni composte
f ◦ f −1 : B → B
f −1 ◦ f : A → A ,
sono la funzione identità in B ed A rispettivamente.
16
CAPITOLO 2
Insiemi numerici
Lo scopo di questo capitolo è quello di descrivere rapidamente gli
insiemi numerici partendo dai numeri naturali, passando agli interi
e quindi ai razionali, per concludere con l’insieme dei numeri reali.
Vengono messe in luce le principali proprietà che caratterizzano tali
insiemi.
2.1. I numeri naturali
L’insieme dei numeri naturali, solitamente indicato con la lettera
N , è l’insieme dei numeri del “contare” nella vita di tutti i giorni:
N = {0, 1, 2, 3, 4, ...n, ...} .
2.1.1. Peano e i suoi assiomi. Nel 1894, il matematico italiano Giuseppe Peano, propose di caratterizzare assiomaticamente
l’insieme dei numeri naturali mediante i seguenti cinque assiomi.
(1)
(2)
(3)
(4)
(5)
Esiste un numero naturale, lo 0 .
Ogni numero naturale ha un numero naturale successivo.
Numeri diversi hanno successori diversi.
0 non è il successore di alcun numero naturale.
Ogni sottoinsieme di numeri naturali che contenga lo zero e
il successore di ogni proprio elemento, coincide con l’intero
insieme dei numeri naturali (assioma dell’induzione).
In simboli:
(1)
(2)
(3)
(4)
∃0 ∈ N (N , ∅)
∃s : N → N (s(x) “successivo” di x’)
x , y =⇒ s(x) , s(y)
s(x) , 0, ∀n ∈ N
17
(5) ∀U ⊆ N :
(i) 0 ∈ U,
(ii) x ∈ U ⇒ s(x) ∈ U ,
=⇒ U = N .
2.1.2. Operazioni in N e loro proprietà. Ricordiamo le principali
proprietà delle operazioni di addizione e moltiplicazione dei numeri
naturali. Da notare che addizione e moltiplicazione possono essere
definite rigorosamente utilizzando gli assiomi di Peano. Per quanto
riguarda la somma possiamo definirla ricorsivamente ponendo
(2.1)
n + 0 = n, n + s(m) = s(n + m),
mentre per la moltiplicazione si pone
(2.2)
n · 0 = 0, n · s(m) = n · m + n,
(Nella moltiplicazione il punto (”·”) spesso si toglie accostando le
lettere : a · b ha lo stesso significato di ab). La prima regola nella (2.2)
è detta legge di annullamento del prodotto.
Osservazione 2.1. Chiamiamo 1 = s(0) il successivo dello zero
(”uno”). Si osservi che, dalla (2.1), si ha
n + 1 = n + s(0) = s(n + 0) = s(n),
il che giustifica la notazione n + 1 per denotare s(n), il successivo di
n.
Si dice che 0 è l’elemento neutro rispetto alla somma e 1 è l’elemento neutro rispetto al prodotto. Utilizzando il principio di induzione
(e la definizione di addizione e moltiplicazione) possiamo dimostrare (con un po’ di pazienza) le seguenti proprietà di addizione e
moltiplicazione:
(1) Elemento neutro dell’addizione:
a + 0 = 0 + a = a ∀a ∈ N.
(2) Proprietà associativa dell’addizione:
(a + b) + c = a + (b + c) ∀a, b, c ∈ N .
(3) Proprietà commutativa dell’addizione:
a + b = b + a ∀a, b ∈ N .
18
(4) Elemento neutro della moltiplicazione:
a · 1 = 1 · a = a ∀a ∈ N.
(5) Proprietà commutativa della moltiplicazione:
a · b = b · a ∀a, b ∈ N .
(6) Proprietà associativa della moltiplicazione:
(a · b) · c = a · (b · c) ∀a, b, c ∈ N .
(7) Proprietà distributiva della moltiplicazione rispetto all’addizione:
(a + b) · c = a · c + b · c ∀a, b, c ∈ N .
Osserviamo che da queste proprietà possono essere ricavate
facilmente altre proprietà dei numeri naturali. Per esempio
(1) dispari + dispari = pari
Infatti: (2n + 1) + (2m + 1) = 2m + 2n + 2 = 2(m + n + 1) .
(2) dispari · dispari = dispari
Infatti: (2n + 1) · (2m + 1) = 2m · 2n + 2m + 1 = 2(mn + m + n) + 1 .
Osservazione 2.2. Si possono anche dimostrare (sempre a partire dalle definizioni di somma e prodotto) le seguenti importanti
proprietà
(2.3)
(2.4)
a=b⇒a+c=b+c
∀a, b, c ∈ N,
a = b ⇒ a · c = b · c ∀a, b, c ∈ N.
Inoltre si può definire in N una relazione d’ordine. Si dice che m ≥ n
se m = n oppure esiste k ∈ N \ {0} tale che n + k = m: se accade
quest’ultima eventualità si scrive anche m > n. Si può dimostrare
che la relazione m ≥ n è in effetti un relazione di ordine totale su N.
Si noti che se m > n è ben definito il numero naturale indicato con
m − n tale che n + (m − n) = n. Inoltre si può dimostrare che
m > n ⇒ m + k > n + k, m > n, k , 0 ⇒ m · k > n · k.
19
2.2. I numeri relativi
L’insieme dei numeri relativi, che estende quello dei naturali,
viene di norma indicato con la lettera Z e può essere descritto da
Z = {0, 1, 2, ..., n, ...} ∪ {−1, −2, ..., −m, ...} ,
dove −1, −2, ..., −m, ... saranno rispettivamente i numeri inversi di
1, 2, ..., m, ... rispetto alla somma (l’inverso rispetto alla somma di un
numero a è quel numero, denotato con −a, tale che a+(−a) = (−a)+a =
0). In questo modo 0 resta l’elemento neutro rispetto alla somma in
Z, la somma gode delle proprietà associativa e commutativa e della
proprietà (2.3). L’inverso rispetto alla somma di un numero a è detto
anche opposto di a. Da notare inoltre che che −(−n) = n.
I numeri naturali diversi da 0 saranno i numeri interi positivi (> 0),
mentre i numeri del tipo −m con m ∈ N \ {0} saranno i numeri interi
negativi (< 0).
Se n, m sono numeri naturali si pone per definizione
n − m, se n > m,
n + (−m) =
0 se n = m,
−(m − n) se n < m.
La quantità n + (−m) si indica anche con n − m. Infine si pone
(−n) + (−m) = −(n + m).
Possiamo cosı̀ estendere in Z la relazione di ordine definita in N
ponendo
m > n ⇔ m − n > 0.
Adesso si pone il problema di definire la moltiplicazione in Z
estendendo quella definita in N. Se m, n sono numeri interi positivi
la moltiplicazione sarà la stessa che in N. Supponiamo ora che
n > 0, m < 0. Sia m = −p, p > 0. Allora se vogliamo che valga la
proprietà distributiva
n · m = n · (−p)
è l’opposto di n · p , cioè
n · (−p) + n · p = 0 ,
20
dato che
n · (−p) + n · p = n · (−p + p) = n · 0 = 0
e vale la legge di annullamento del prodotto in N. Da notare che,
se vogliamo che valga la proprietà distributiva, −n · 0 è l’opposto di
n · 0 per cui la legge di annullamento del prodotto vale anche in Z.
Dunque anche la definizione di (−n) · (−m) è forzata e si deve avere:
(−n) · (−m) = n · m.
Si noti anche che 1 è l’elemento neutro rispetto al prodotto,
essendo
n · 1 = n ∀n ∈ Z .
Concludiamo questa sezione ricordando che dati due interi non
nulli m ed n, n si dice divisore di m se esiste un intero tale che m = k · n.
Si noti che 1 e −1 sono divisori di qualunque numero intero. Due
interi non nulli si dicono primi tra loro se non hanno altri divisori
comuni oltre a 1 e −1.
Esempio 2.3. Si può verificare che la relazione “n è divisore di m”
sull’insieme dei numeri naturali N è una relazione d’ordine, ma non
totale perché, ad esempio, 2 è divisore di 3, ma nemmeno accade che
3 è divisore di 2.
2.3. I numeri razionali
L’insieme dei numeri razionali viene indicato solitamente con la
lettera Q , e i suoi elementi possono essere descritti nel seguente
modo.
Q = {r = ab−1 : a ∈ Z, b ∈ Z \ {0}},
ove b−1 è l’inverso di b rispetto alla moltiplicazione (cioè quel numero
tale che b · (b−1 ) = (b−1 ) · b = 1), detto anche reciproco di b. Scriveremo
anche r = ba , con a ∈ Z, b ∈ Z \ {0}, con l’accorgimento che, per ogni
am
m ∈ Z, bm
= ba .
21
Osservazione 2.4. Ricordando la definizione 1.11 e la discussione
seguente la definizione stessa, una volta che si è definita sull’insieme
X = Z × (Z \ {0}) la relazione per cui R( ba , dc ) se e solo se ad = bc, è
facile verificare che questa è una relazione di equivalenza. L’insieme
Q dei numeri razionali può esser definito proprio come l’insieme
quoziente X/R.
Somma e moltiplicazione si possono definire nel seguente modo:
a c aq pb def 1
+ =
+
=
(aq + pb)
b d bq qb
bq
e
a p def ap
· =
,
b q
bq
verificando che tali definizioni non dipendono dalla rappresentazione scelta per i numeri razionali.
Utilizzando le due definizioni precedenti e le proprietà di somma
e prodotti in Z si possono facilmente dimostrare le seguenti proprietà
di somma e prodotto sui razionali (assiomi di campo)
I) In Q l’operazione + (somma) verifica ∀a, b, c, ∈ Q :
(1) a + b = b + a (proprietà commutativa)
(2) (a + b) + c = a + (b + c) (proprietà associativa)
(3) Esiste l’elemento neutro della somma (lo zero): a + 0 = a
(4) Per ogni a , esiste l’elemento inverso rispetto
alla somma (−a): a + (−a) = 0.
II) In Q l’operazione · (moltiplicazione) verifica ∀a, b, c, ∈ Q :
(1) a · b = b · a (proprietà commutativa)
(2) (a · b) · c = a · (b · c) (proprietà associativa)
(3) Esiste l’elemento neutro rispetto al prodotto (1):
a · 1 = a ∀a
(4) ∀a , 0, esiste l’inverso rispetto al prodotto (a−1 ):
a · a−1 = 1
(5) Proprietà distributiva (del prodotto rispetto alla somma):
(a + b) · c = a · c + b · c
Se usiamo la notazione r = ba , lo zero si può rappresentare con 01
e l’unità con 11 dove 0 e 1 sono rispettivamente gli elementi neutri
22
della addizione e moltiplicazione in Z. Inoltre a−1 significa 1a mentre
, Da queste fondamentali proprietà si deducono tutte le altre.
−r = −a
b
Naturalmente possiamo definire la differenza ponendo:
a − b = a + (−b),
ove b è l’inverso di b rispetto alla somma. Se r =
p
q
∈ Q \ {0} si pone
r > 0, se p, q sono concordi,
mentre
r < 0, se p, q sono discordi.
Anche in Q possiamo definire una relazione d’ordine totale, indicata
con il simbolo ≥:
b ≥ a ⇔ b − a ≥ 0.
Analogamente si possono definire le relazioni d’ordine ≤, <, >. La
relazione ≤ (≥) rende (Q, +, ·) un campo ordinato. Tale relazione ha
le seguenti caratteristiche:
• a≤b ⇒ a+c≤b+c
• a ≤ b,c ≥ 0 ⇒ a · c ≤ b · c,
che possono essere dimostrate facilmente a partire dalle definizioni
date.
Osservazione 2.5. Sia a , 0 . L’equazione di primo grado
ax + b = 0
ha come soluzione il numero razionale
b
x=− .
a
23
Dagli assiomi di campo, sappiamo che esiste l’inverso di a , cioè a−1
tale che a · a−1 = 1 . Quindi
a−1 (ax + b) = a−1 · 0 = 0
a−1 · ax + a−1 · b = 0
1 · x + a−1 · b = 0
x + a−1 b = 0
x + a−1 b − (a−1 b) = −a−1 b
b
x = −a−1 b ≡ − .
a
Osservazione 2.6. L’equazione di secondo grado
(2.5)
x2 = 2 ,
(ove x2 = x · x) ha come soluzioni
√
x = ± 2,
che però non sono numeri razionali. Infatti, supponiamo per assurdo
p
che la (2.5) ammetta soluzioni razionali e sia x = , p, q ∈ Z , q , 0 ,
q
una soluzione. Come abbiamo già osservato
p·α p
= , ∀α , 0.
q·α q
Di conseguenza, senza perdita di generalità, possiamo supporre che
p
p e q siano numeri primi tra loro. Poiché x = q è soluzione della
(2.5), si ha
p2
x2 = 2 = 2 ,
q
da cui
p2 = 2q2 .
Quindi p2 è pari e di conseguenza anche p lo è (infatti, se per assurdo
p fosse dispari, anche p2 sarebbe dispari). Da p = 2m , segue che
4m2 = 2q2 , da cui 2m2 = q2 . Ma q2 è pari, quindi anche q è pari, cioè
q = 2n . Pertanto sia p che q sono divisibili per 2 e quindi non sono
primi tra loro. Possiamo cosı̀ concludere che l’equazione (2.5) non
√
ammette soluzioni razionali, e quindi 2 non è un numero razionale.
24
È proprio per poter dare senso alle radici quadrate dei numeri
positive che si amplia l’insieme Q a quello dei numeri reali.
2.4. I numeri reali
L’insieme dei numeri reali viene generalmente indicato con la
lettera R . Con il simbolo (R, +, ·) si indica R con la somma e la
moltiplicazione. Esso è un campo, essendo caratterizzato dagli stessi
assiomi dei numeri razionali. Tale campo è totalmente ordinato dalla
relazione ≤ (0 ≥) e verifica le proprietà:
• a≤b ⇒ a+c≤b+c
• a ≤ b,c ≥ 0 ⇒ a · c ≤ b · c,
che abbiamo visto valere per i numeri razionali. L’insieme dei numeri
reali, oltre agli assiomi dei numeri razionali, è caratterizzato dalla
seguente proprietà che lo differenzia da Q
Assioma di completezza:
(2.6) Siano A, B ⊂ R tali che a ≤ b ∀a ∈ A, , ∀b ∈ B .
Allora ∃x ∈ R ( detto elemento separatore tra A e B) :
a ≤ x ≤ b,
∀a ∈ A, ∀b ∈ B .
Figura 2.1.
Esempio 2.7. Gli insiemi
A = {y ∈ R : y ≤ 0} ∪ {y ∈ R : y > 0 ∧ y2 < 2} ,
25
e
B = {y ∈ R : y > 0 ∧ y2 > 2} ,
hanno come elemento di separazione il numero reale
√
2.
Figura 2.2.
Un modo per descrivere i numeri reali è quello in cui si usano gli
allineamenti decimali cosiddetti propri.
Definizione 2.8. Chiamiamo allineamento decimale proprio un
allineamento decimale
a2
a1
an
+ 2 + ... n + ...
a0 , a1 a2 . . . an . . . ≡ a0 +
10 10
10
in cui le cifre an ∈ {0, 1, 2, 3, 4, 5, 6, 7, 8, 9} da un certo posto in poi non
sono tutte uguali a 9.
Somma e relazione di ordine tra gli allineamenti decimali propri
sono facili da definire. Un po’ meno lo è la definizione di moltiplicazione, perché si tratta di moltiplicare tra loro due somme “infinite”.
In ogni caso si può fare e con parecchia pazienza si può dimostrare
che l’insieme degli allineamenti decimale propri verifica gli assiomi
di campo ordinato e l’assioma di completezza e dunque è un modo
di rappresentare i numeri reali.
26
CAPITOLO 3
Polinomi, radici, intervalli, moduli
Questo capitolo inizia ricordando la nozione di intervallo sui
numeri reali, e continua con una digressione su polinomi e radici,
e si conclude richiamando la definizione di modulo e alcune sue
proprietà.
3.1. Intervalli
Siano a, b ∈ R , a < b . Definiamo i seguenti sottoinsiemi di R :
[a, b] = {x ∈ R : a ≤ x ≤ b} ,
] a, b ] = {x ∈ R : a < x ≤ b} ,
[ a, b [ = {x ∈ R : a ≤ x < b} ,
] a, b [ = {x ∈ R : a < x < b} .
L’insieme [a, b] è detto intervallo chiuso, ] a, b [ è detto intervallo aperto.
In generale, si definisce intervallo un sottoinsieme di R tale che, per
ogni coppia di suoi elementi x1 , x2 , appartengono al sottoinsieme
tutti i numeri reali compresi tra x1 e x2 . Dato a ∈ R , sono intervalli
anche i seguenti sottoinsiemi di R:
] a, +∞ [ = {x ∈ R : x > a} ,
[ a, +∞ [ = {x ∈ R : x ≥ a} ,
[ − ∞, a [ = {x ∈ R : x < a} ,
] − ∞, a ] = {x ∈ R : x ≤ a} .
Teniamo presente che
• I è un intervallo se per ogni a, b ∈ I con a < b si ha che
[a, b] ⊂ I ;
27
y
4
2
-4
2
-2
4
x
-2
-4
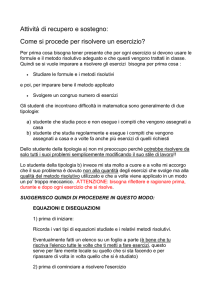
Figura 3.1. La funzione f (x) = x.
• C ⊂ R × R è convesso se e solo se ∀ c1 , c2 ∈ C il segmento che
congiunge c1 e c2 è contenuto in C .
3.2. Polinomi
Definizione 3.1. Sia n ∈ N . Un’espressione della forma
P(x) = an xn + an−1 xn−1 + ... + a1 x + a0 ,
con ai ∈ R, an , 0 , x ∈ R ,
viene detta polinomio di grado n . Gli ai sono chiamati coefficienti del
polinomio e n ≡ deg P è il grado del polinomio.
I polinomi costituiscono un particolare esempio di funzione.
Esempio 3.2. Consideriamo il seguente esempio di polinomio di
grado n:
(3.1)
f (x) = xn ,
n ∈ N.
Per n=1 , si ha
f (x) = x
che è la funzione identità in R ed è una funzione iniettiva e suriettiva.
Per n=2 , abbiamo
f (x) = x2
che è una funzione non iniettiva e non suriettiva (lo diventa se consideriamo la funzione con f : R+ → R+ ), ove R+ = {x ∈ R : x ≥ 0}.
28
y
15
10
5
-4
2
-2
4
x
Figura 3.2. La funzione f (x) = x2 .
Per n=3, si ha la funzione
f (x) = x3 ,
che è sia iniettiva che suriettiva.
y
5
-2
1
-1
2
x
-5
Figura 3.3. La funzione f (x) = x3 .
Le funzioni definite da (sottoinsiemi di) R verso R, godono della
proprietà che sia sul dominio che sul codominio è definita la relazione
d’ordine totale a ≥ b. Questo fatto motiva la seguente definizione.
Definizione 3.3. Sia f : A ⊆ R → R una funzione definita su un
sottinsieme A di R a valori in R. Diciamo che f è
• monotòna crescente su A se, ∀a, b ∈ A : a < b =⇒ f (a) ≤ f (b);
29
• monotòna strettamente crescente su A se, ∀a, b ∈ A : a < b =⇒
f (a) < f (b);
• monotòna decrescente su A se, ∀a, b ∈ A : a < b =⇒ f (a) ≥ f (b);
• monotòna strettamente decrescente su A se, ∀a, b ∈ A : a <
b =⇒ f (a) > f (b).
La funzione xn gode di alcune interessanti proprietà.
Proprietà 3.4.
• Per n ≥ 1 , la funzione f (x) = xn con f : R+ → R+ è
strettamente crescente, cioè
0 ≤ x1 < x2
⇒
f (x1 ) < f (x2 ) .
Per dimostrare questo fatto, osserviamo preliminarmente
che la condizione f (x1 ) < f (x2 ) equivale a f (x2 ) − f (x1 ) > 0 .
Siano 0 ≤ x1 < x2 . Abbiamo
per n = 1 ,
f (x2 ) − f (x1 ) = x2 − x1 > 0 ;
per n = 2 ,
f (x2 ) − f (x1 ) = x22 − x21 = (x2 − x1 )(x2 + x1 ) > 0 ;
per n = 3 ,
f (x2 ) − f (x1 ) = x32 − x31 = (x2 − x1 )(x22 + x1 x2 + x21 ) > 0 .
In generale, si ha
(3.2) f (x2 ) − f (x1 ) = xn2 − xn1 =
n−2
(x2 − x1 )(xn−1
+ xn−2
+ xn−1
2
2 x1 + ... + x2 x1
1 ) =
(x2 − x1 ) · g(x1 , x2 ) > 0 ,
perché g(x1 , x2 ) è dato dalla somma di termini non negativi
almeno uno dei quali, xn−1
, é strettamente positivo. Si osservi
2
che nella (3.2) abbiamo utilizzato il fatto che
n−2
(x2 − x1 )(xn−1
+ xn−2
+ xn−1
2
2 x1 + ... + x2 x1
1 )
2 n−2
= xn2 + xn−1
+ x2 xn−1
2 x1 + ... + x2 x1
1
n−1
2
−(x1 xn−1
+ xn−2
+ xn1 ),
2
2 x1 + ... + x2 x1
e semplificando nell’ultima espressione restano soltanto il
primo e l’ultimo termine, cioè xn2 − xn1 .
30
Si noti che essendo g(x1 , x2 ) > 0 dalla (3.2) si ha
xn2 − xn1 > 0
⇔
x2 − x1 > 0 .
• Se n è pari, f (x) = xn è una funzione pari, cioè
f (−x) =
f (x) ∀x ∈ R.
La dimostrazione di questa proprietà è immediata.
Infatti, per n pari, si ha
f (−x) = (−x)n = (−1)n xn = xn = f (x) ∀x ∈ R .
Di conseguenza, per n pari, il grafico della funzione f (x) = xn
è simmetrico rispetto all’asse y (vedere in Figura 3.2 il grafico
di f (x) per n=2).
• Se n è dispari, f (x) = xn è una funzione dispari, cioè f (−x) =
− f (x) ∀x ∈ R.
Anche in questo caso, segue facilmente che per n dispari
f (−x) = (−x)n = (−1)n xn = −xn = − f (x) ∀x ∈ R .
Di conseguenza, per n dispari, il grafico della funzione è simmetrico rispetto all’origine degli assi cartesiani (ad esempio
vedere in Figura 3.3 il grafico di f (x) per n=3).
Sia n ∈ N , n > 0 . Abbiamo visto che la funzione xn è strettamente
crescente in R+ . Da questo segue che la funzione x−n è strettamente
decrescente in in R+ .
In generale, vale la seguente
Proposizione 3.5. Se la funzione f : [a, b] → R+ \ {0} è strettamente
1
è strettamente decrescente.
crescente, allora
f
Dimostrazione. Supponiamo a ≤ x1 < x2 ≤ b .
1
1
Vogliamo dimostrare che
>
. Poiché f è positiva, la
f (x1 )
f (x2 )
relazione sopra equivale a
f (x2 )
> 1,
f (x1 )
a sua volta equivalente a
f (x2 ) > f (x1 ) ,
31
cioè l’ipotesi di stretta crescenza di f .
3.3. Radici n-esime
Dati n ∈ N e x ∈ R, il simbolo xn è detto potenza n-esima di x .
Vale la seguente
Proprietà 3.6.
∀y ∈ R+ , n ∈ N \ {0}, ∃! a ∈ R+ : an = y .
Osservazione 3.7. L’unicità è immediata perché
a1 , a2 ⇒ an1 , an2 .
Infatti se 0 ≤ a1 < a2 come abbiamo visto an1 < an2 .
L’esistenza è più delicata: la dimostrazione al daremo nel corso di
Analisi Matematica 1, utilizzando il cosiddetto Teorema degli Zeri.
Definizione 3.8. Il numero reale positivo a che verifica la
Proprietà 3.6 è detto radice n-esima di y e si indice con
√
n
1
y ≡ yn
Osservazione 3.9. Si osservi che, nel caso in cui n sia un numero
dispari, la radice n-ma è ben definita anche per gli y negativi, e quindi,
in definitiva, ∀y ∈ R. Ciò dipende dal fatto che la funzione xn : R →
R per n dispari è biettiva (e dunque invertibile); quando n è pari
invece, abbiamo bisogno di restringere il dominio (e il codominio) di
xn all’intervallo [0, +∞[, per poter ottenere una funzione biettiva.
32
3.4. Valore assoluto
Definizione 3.10. Il valore assoluto o modulo di un numero reale x ,
è definito nel seguente modo:
(
x se x ≥ 0 ,
|x| =
−x se x < 0 .
Consideriamo un numero reale a > 0 e la disequazione
|x| ≤ a .
(3.3)
Se x ≥ 0 , dalla definizione di valore assoluto si ha che |x| = x , quindi
la (3.3) diventa
x ≤ a.
Se x < 0 , la (3.3) diventa
−x ≤ a ,
cioè
x ≥ −a .
Quindi, complessivamente, le soluzioni della (3.3) sono i valori
di x compresi tra −a e a , cioè
−a ≤ x ≤ a
o equivalentemente, i valori dell’intervallo [−a, a] .
Figura 3.4.
Proprietà fondamentali del valore assoluto.
(1) −|x| ≤ x ≤ |x| ∀x ∈ R ; tale proprietà si dimostra
distinguendo i casi x ≥ 0 e x < 0.
(2) |xy| = |x||y| ∀x, y ∈ R
e in particolare | − x| = |x| ∀x ∈ R ; questo si dimostra
distinguendo tra le posizioni di (x, y) in R2 , a seconda che si
trovi nel primo, secondo, terzo o quarto quadrante.
33
(3) (Disuguaglianza triangolare) |x + y| ≤ |x| + |y| ∀x ∈ R .
Per dimostrare tale proprietà, proveremo la seguente
disuguaglianza ad essa equivalente
|x + y|2 ≤ (|x| + |y|)2
(3.4)
∀x ∈ R .
In generale, osserviamo che ∀a ∈ R si ha
(
a2 se a ≥ 0 ,
2
2
2
|a| = a , essendo |a| =
(−a)2 se a < 0 .
Pertanto la (3.4) equivale a
x2 + 2xy + y2 ≤ x2 + 2|x||y| + y2 .
Tale disuguaglianza è vera se e solo se
2xy ≤ 2|x||y|
⇔
xy ≤ |x||y|
⇔
xy ≤ |xy| ,
ma quest’ultima proprietà è vera per ogni x, y ∈ R . La
proprietà triangolare risulta quindi dimostrata.
(4) ||x| − |y|| ≤ |x − y| ∀x, y ∈ R .
Dimostrazione: basta sfruttare due volte la disuguaglianza
triangolare appena dimostrata. Infatti:
|x| = |x − y + y| ≤ |x − y| + |y| =⇒ |x| − |y| ≤ |x − y|
e
|y| = |y − x + x| ≤ |y − x| + |x| = |x − y| + |x| =⇒ |x| − |y| ≥ −|x − y|,
dove abbiamo anche sfruttato il fatto che | − a| = |a|. Dunque
−|x − y| ≤ |x| − |y| ≤ |x − y|,
e quindi, ricordando la proprietà (1) dimostrata sopra, si ha
la tesi.
34
CAPITOLO 4
Equazioni e disequazioni algebriche
In questo capitolo vengono presentati alcuni metodi risolutivi per
equazioni e disequazioni di secondo grado, disequazioni biquadratiche, equazioni di quarto grado reciproche, disequazioni contenenti il
modulo, disequazioni razionali e irrazionali. Per ciascuna tipologia,
l’esposizione del metodo risolutivo è seguito da alcuni esempi svolti.
4.1. Equazioni di secondo grado
Nel capitolo precedente abbiamo introdotto la nozione di polinomio di grado n . In questa sezione prenderemo in considerazione
polinomi di secondo grado e ci occuperemo delle loro radici, ossia
dato il polinomio
P(x) = ax2 + bx + c ,
a, b, c ∈ R , a , 0 ,
studieremo l’equazione P(x) = 0 , ovvero
(4.1)
ax2 + bx + c = 0 .
Il nostro scopo in questa sezione sarà precisamente quello di trovare
le soluzioni x dell’equazione, dette zeri del polinomio o radici dell’equazione, cioè quei valori numerici che sostituiti al posto di x nella
(4.1) danno come risultato il valore 0.
Osserviamo anzitutto che, grazie all’ipotesi a , 0 , l’equazione
(4.1) è equivalente a
c
b
x2 + x + = 0 .
a
a
Cerchiamo α, β tali che
(4.2)
b
c
x2 + x + = (x − α)2 + β = x2 − 2αx + α2 + β .
a
a
35
Si noti subito che
(4.3)
(x − α)2 + β = 0
⇔
(x − α)2 = −β
⇔
p
x − α = ± −β ,
segue quindi che deve essere β ≤ 0 . Dalla (4.2) si ottiene cosı̀ il
sistema
b
−2α = a
α2 + β = ac
β≤0
da cui
b
4ac − b2
α=− , β=
.
2a
4a2
Sostituendo nella (4.3) si ottiene
!2
b2 − 4ac
b
=
x+
;
2a
4a2
per semplicità definiamo
∆ := b2 − 4ac
detto discriminante dell’equazione. Quindi
!2
b
∆
x+
= 2.
2a
4a
Ora, se ∆ > 0 , si ha
r
b
∆
x+
=±
,
2a
4a2
quindi l’equazione ha due soluzioni x1 , x2 reali e distinte date da
√
√
−b + ∆
−b − ∆
x1 =
, x2 =
.
2a
2a
Osservazione 4.1. Si noti che x1 + x2 = − ba , x1 x2 =
c
a
Se ∆ = 0 , si ha
!2
b
x+
= 0,
2a
perciò l’equazione ha due soluzioni reali coincidenti, cioè
b
.
2a
Infine, se ∆ < 0 , l’equazione non ammette soluzioni reali (non
√
essendo definita ∆).
x1 = x2 = −
36
Osservazione 4.2. Consideriamo il caso ∆ ≥ 0 , e siano x1 , x2 soluzioni dell’equazione, quindi P(x1 ) = P(x2 ) = 0 . Dal teorema di
Ruffini1, sappiamo che è possibile fattorizzare il polinomio, poiché
P(x) è divisibile per (x − x1 ) . Pertanto, se consideriamo l’equazione
P(x) = 0 nella forma
b
c
x2 + x + = 0 ,
a
a
si ha che
P(x) = (x − x1 )(dx + c) .
Essendo nel nostro caso il coefficiente di x2 uguale a 1 , P(x) diventa
P(x) = (x − x1 )(x + c) = (x − x1 )(x − x2 ) = x2 − (x1 + x2 )x + x1 x2 .
4.2. Disequazioni di secondo grado
In generale, una disequazione di secondo grado può essere
ricondotta nella forma
ax2 + bx + c R 0
con a > 0 . Se consideriamo la corrispondente funzione
y = ax2 + bx + c .
Possiamo osservare che geometricamente essa rappresenta una parabola con concavità rivolta verso l’alto. Si possono distinguere tre
casi sulla base del valore del discriminante ∆ . Consideriamo per
semplicità il caso
ax2 + bx + c ≥ 0 ,
a > 0.
Siano x1 e x2 le soluzioni (eventualmente complesse) dell’equazione
associata ax2 + bx + c = 0 . Si ha che:
• se ∆ > 0 e se supponiamo x1 < x2 , la disequazione è
soddisfatta per ogni x ≤ x1 ∨ x ≥ x2 ;
• se ∆ = 0 , si ha x1 = x2 e la disequazione è soddisfatta ∀x ∈ R ;
• se ∆ < 0 , la disequazione è soddisfatta ∀x ∈ R .
37
Figura 4.1.
Presentiamo di seguito un esercizio svolto.
Esercizio 4.3. Risolvere la seguente disequazione di secondo
grado:
x2 − 3x + 2 < 0 .
Svolgimento: Il discriminante in questo caso è
∆ = 9 − 8 = 1 > 0.
Quindi, l’equazione
x2 − 3x + 2 = 0
ammette due soluzioni reali e distinte date da
3±1
x1,2 =
⇒ x1 = 1 , x2 = 2 .
2
Pertanto, la disequazione ha come soluzioni i valori dell’intervallo
] 1, 2 [ .
1
Teorema di Ruffini: un polinomio P(x) è divisibile per (x − x1 ) se e solo se
P(x1 ) = 0.
38
4.3. Radici razionali
Allo scopo di trovare radici razionali di un polinomio a coefficienti
interi è utile il seguente
Teorema 4.4. Consideriamo l’equazione
an xn + an−1 xn−1 + . . . a1 x + a0 = 0
con ai ∈ Z, e an , 0. Se x0 =
un divisore di an .
Dimostrazione. Sia
p
q
p
q
è una radice allora p è un divisore di a0 e q è
una radice con p e q primi tra loro. Si ha
p
p
p
an ( )n + an−1 ( )n−1 + . . . a1 ( ) + a0 = 0
q
q
q
Allora abbiamo
an pn + an−1 pn−1 q + . . . a1 pqn−1 + a0 qn = 0.
Ora p divide i primi n−1 termini quindi deve dividere a0 qn . Poiché
p e q sono primi tra loro, p deve dividere a0 . Analogamente q divide i
termini dal secondo in poi quindi divide an pn e pertanto divide an . Esempio 4.5. Se abbiamo una equazione del tipo
4x5 − 3x2 + 4x − 5 = 0
le eventuali radici razionali sono della forma ± 54 , ± 52 , ±5, ± 14 , ± 21 , ±1.
Si verifica in effetti che x = 1 è l’unica radice razionale.
Consideriamo invece l’equazione
x3 + x + 1 = 0 .
Osserviamo che gli unici “candidati”per l’annullamento del polinomio P(x) = x3 + x + 1 sono ±1 . Ma nessuno dei due annulla P(x) .
Quindi l’equazione data non ha soluzioni razionali.
39
4.4. Disequazioni biquadratiche
In questa sezione, vengono proposti alcuni esercizi svolti con
lo scopo di presentare il metodo risolutivo per le disequazioni
biquadratiche.
Esempio 4.6. Risolviamo la seguente disequazione
4x4 − 17x2 + 4 > 0 .
(4.4)
Utilizzando la sostituzione
x2 = t ,
la disequazione iniziale diventa una disequazione di secondo grado
in t :
4t2 − 17t + 4 > 0 .
(4.5)
Calcoliamo il discriminante
∆ = (17)2 − 4 · 16 = 225 > 0
⇒
√
∆ = 15
e determiniamo le soluzioni dell’equazione associata:
1
17 ± 15
⇒ t1 = 4 , t2 = .
8
4
Le soluzioni della disequazione (4.5) sono
1
t<
∪ {t > 4} .
4
Quindi la (4.4) ha come soluzioni
n
o
1
2
∪ x2 > 4 ;
x <
4
le soluzioni di
1
x2 <
4
sono
1
1
− <x<
,
2
2
e quelle di
x2 > 4
t1,2 =
sono
{x < −2} ∪ {x > 2} .
40
Riassumendo, le soluzioni della disequazione iniziale sono
1
1
∪ {x > 2} .
{x < −2} ∪ − < x <
2
2
Esempio 4.7. Risolvere
9x4 + 4x2 − 5 > 0 .
(4.6)
Ponendo x2 = t si ottiene
9t2 + 4t − 5 > 0 .
Si ha
∆ = 16 + 180 = 196
√
⇒
∆ = 14 ,
da cui
−4 ± 14
5
⇒ t1 = , t2 = −1 .
18
9
Quindi le soluzioni della (4.6) sono
n
o 5
2
2
x < −1 ∪ x >
.
9
t1,2 =
La disequazione x2 < −1 non ha soluzioni reali (essendo ∆ = −4 < 0) ,
mentre le soluzioni di x2 > 95 sono
√ ) (
√ )
(
5
5
x<−
∪ x>
,
3
3
che sono anche le soluzioni della (4.6).
4.5. Equazioni di quarto grado reciproche
Le cosiddette equazioni di quarto grado reciproche, si classificano
nel seguente modo:
• I specie
P(x) = ax4 + bx3 + cx2 + bx + a
a, b, c ∈ R , a , 0 ;
• II specie
P(x) = ax4 + bx3 − bx − a
41
a, b ∈ R , a , 0 .
Osservazione 4.8. Se x0 è una radice di P(x) = 0 , allora anche x10
è radice di P(x) = 0 . Infatti, prendiamo in considerazione l’equazione di I specie (si ragiona analogamente per quelle di II specie). Il
polinomio è della forma
P(x) = ax4 + bx3 + cx2 + bx + a .
Osserviamo che
1
P
x0
(4.7)
(4.8)
(4.9)
a
x40
1
= 4
x0
1
= 4
x0
=
+
b
b
c
+a
+ 2+
3
x0 x0 x0
a + bx0 + cx20 + bx30 + ax40
· P(x0 ) .
Quindi
P(x0 ) = 0
1
P
= 0.
x0
⇒
Metodo risolutivo per le equazioni di I specie. Consideriamo
l’equazione P(x) = 0 dove il polinomio P(x) è del tipo
P(x) = ax4 + bx3 + cx2 + bx + a
a, b, c ∈ R , a , 0 .
Osserviamo preliminarmente che P(0) = a , 0 . Quindi possiamo escludere a priori il valore 0 per x , cioè supporre x , 0 . Di
conseguenza, si ha
P(x)
b
a
2
=
ax
+
bx
+
c
+
+
x2
x x2
ovvero
P(x)
1
1
2
=a x + 2 +b x+
+ c.
x2
x
x
Quindi l’equazione iniziale può essere riscritta nella forma
1
1
2
a x + 2 +b x+
+ c = 0.
x
x
Si utilizza a questo punto la sostituzione
(4.10)
1
t=x+
x
⇒
1
1 2
x + 2 = x+
− 2,
x
x
2
42
grazie alla quale l’equazione diventa
at2 − 2a + bt + c = 0 .
Analogamente per le disequazioni.
Esempio 4.9. Risolvere la seguente disequazione reciproca di I
specie
2x4 − 3x3 + 4x2 − 3x + 2 > 0 .
(4.11)
Utilizzando il metodo appena esposto, grazie alla sostituzione (4.10),
si ottiene la disequazione in t
2t2 − 3t > 0 ,
le cui soluzioni sono
3
.
{t < 0} ∪ t >
2
Quindi rispetto ad x , si ha:
x+
1
<0
x
⇒
x2 + 1
<0
x
⇒
x<0
(essendo x2 + 1 > 0 per ogni x reale) ;
x+
1 3
>
x 2
x2 + 1 3
>
x
2
2
x +1 3
− >0
x
2
2
2x − 3x + 2
> 0.
2x
⇔
⇔
⇔
Osserviamo che 2x2 − 3x + 2 > 0
Quindi
∀x ∈ R , essendo ∆ = 9 − 16 < 0 .
2x2 − 3x + 1
>0
2x
⇔
x > 0.
Si noti che nella procedura precedente abbiamo usato x , 0 che è
soluzione della disequazione (4.11), che pertanto è verificata da ogni
numero reale.
43
Metodo risolutivo per le equazioni di II specie. Consideriamo
il polinomio
P(x) = ax4 + bx3 − bx − a
a, b ∈ R , a , 0 .
Osserviamo che
P(1) = a + b − b + a = 0 ,
P(−1) = a + b(−1) − b(−1) − a = a − b + b − a = 0 ,
quindi P è divisibile per x − 1 e per (x + 1). Applicando la regola di
Ruffini, si ottiene
P(x) = (x − 1)(ax3 + (b + a)x2 + (b + a)x + a) .
Consideriamo ora il polinomio
Q(x) = (ax3 + (b + a)x2 + (b + a)x + a) ,
e osserviamo che
Q(−1) = −a + (b + a) − (b + a) + a = 0 .
Possiamo dunque applicare di nuovo la regola di Ruffini, ottenendo
cosı̀
Q(x) = (x + 1)(ax2 + bx + a) ,
da cui
P(x) = (x − 1)(x + 1)(ax2 + bx + a) .
Esempio 4.10. Risolviamo la seguente disequazione biquadratica
di II specie
x4 + 4x3 − 4x − 1 ≥ 0 .
Applicando il metodo appena esposto, la disequazione può essere
riscritta nella forma equivalente
(x − 1)(x + 1)(x2 + 4x + 1) ≥ 0 .
Studiamo il segno dei singoli fattori:
x−1≥0
⇔
x ≥ 1, x + 1 ≥ 0
e
x2 + 4x + 1 ≥ 0
⇔
n
⇔
x ≥ −1 ,
o n
o
√
√
x≤− 3−2 ∪ x≥ 3−2
44
(infatti si ha ∆ = 16 − 4 = 12 e
√
−4 ± 12
x1,2 =
2
√
√
√
da cui x1 = − 3 − 2 , x2 = 3 − 2 . (Si noti che − 3 − 2 < −1 <
√
3 − 2 < 1).
Figura 4.2.
Quindi dalla situazione descritta graficamente si deduce che le
soluzioni della disequazione sono
n
o n
o
√
√
x ≤ − 3 − 2 ∪ −1 ≤ x ≤ 3 − 2 ∪ {x ≥ 1} .
4.6. Disequazioni razionali
In generale, una disequazione razionale può essere scritta nella
forma
P(x)
≥ 0,
Q(x)
dove P(x), Q(x) sono polinomi. Dopo aver escluso i valori che annullano Q(x) (che renderebbero la disequazione priva di significato), per
individuare l’insieme delle soluzioni, si studia il segno di ciascuno
dei polinomi, e si traccia poi uno schema riassuntivo (come nell’esempio 4.10) per stabilire gli intervalli di x per i quali l’espressione al
membro sinistro della disequazione assume il segno desiderato (nel
nostro caso valori positivi o nulli), ricordando la regola dei segni.
45
Esempio 4.11. Risolvere la disequazione
1
1
≥
.
x−1 x+1
Per prima cosa, escludiamo i valori di x che annullano i denominatori,
cioè
x , 1 , x , −1 .
2+
Riconduciamo ora la disequazione nella forma standard con tutte la
frazioni da una stessa parte della disuguaglianza:
1
1
−
≥0
x−1 x+1
2x2 − 2 + x + 1 − x + 1
≥0
(x − 1)(x + 1)
2x2
≥ 0.
(x − 1)(x + 1)
2+
Studiamo il segno dei singoli fattori:
2x2 ≤ 0 ∀x ∈ R
x−1>0
⇔
x>1
x+1>0
⇔
x > −1 .
Quindi, riassumendo, si ha:
Figura 4.3.
Pertanto l’insieme delle soluzioni è
{x < −1} ∪ {x > 1} ∪ {0} .
46
Esempio 4.12. Risolvere la disequazione
1
1
1
+
+
≥ 0.
x x−1 x−2
Anzitutto si ha:
x , 0,x , 1,x , 2.
Riconduciamo la disequazione nella forma standard:
(x − 1)(x − 2) + x(x − 2) + x(x − 1)
≥0
x(x − 1)(x − 2)
x2 − 2x − x + 2 + x2 − 2x + x2 − x
≥0
x(x − 1)(x − 2)
3x2 − 6x + 2
≥ 0.
x(x − 1)(x − 2)
Studiamo a questo punto il segno dei fattori al denominatore:
x>0
x−1>0
⇔
x>1
x−2>0
⇔
x > 2.
Passiamo quindi a studiare il segno del numeratore, trovando prima
di tutto le radici di
3x2 − 6x + 2 = 0 .
Essendo ∆ = 36 − 24 = 12 > 0 , si ha
√
√
√
6 ± 12 6 ± 2 3 3 ± 3
x1,2 =
=
=
6
6
3
da cui
√
√
3− 3
3+ 3
x1 =
, x2 =
;
3
3
quindi il denominatore è non negativo per i seguenti valori di x:
√ ) (
√ )
(
3− 3
3+ 3
x≤
∪ x≥
.
3
3
Osservando che 0 <
riassuntivo:
√
3− 3
3
<1<
√
3+ 3
3
47
< 2, si ha il seguente schema
Figura 4.4.
Pertanto l’insieme delle soluzioni della disequazione è
√ )
√ ) (
(
3+ 3
3− 3
∪ 1<x≤
∪ {x > 2} .
0<x≤
3
3
4.7. Disequazioni con il valore assoluto
In questa sezione vengono risolte alcune disequazioni con il
valore assoluto.
Esempio 4.13. Risolvere la seguente disequazione
2 − |x − 2| ≥ 0 .
Dalla definizione di valore assoluto, si ha
(
x − 2 se x − 2 ≥ 0 ,
|x − 2| =
−(x − 2) se x − 2 < 0 .
Quindi la disequazione iniziale equivale all’unione delle soluzioni di
due sistemi:
(
(
x−2≥0
x−2<0
∪
2 − (x − 2) ≥ 0
2 + (x − 2) ≥ 0 .
Risolvendoli, si ha
(
(
x≥2
4−x≥0
∪
48
x<2
x≥0
da cui
(
(
x≥2
x≤4
∪
x<2
x ≥ 0.
e infine
{2 ≤ x ≤ 4} ∪ {0 ≤ x < 2} ,
cioè
{0 ≤ x ≤ 4} .
Esempio 4.14. Risolvere la disequazione
2|x2 − x| > |x| .
Esaminiamo per prima cosa il segno di x2 − x:
x2 − x ≥ 0
⇔
{x ≤ 0} ∪ {x ≥ 1}.
Ricordando la definizione di | · | si ha che risolvere la disequazione
precedente è equivalente a determinare le soluzioni di
(
(
(
x≤0
0<x<1
x≥1
∪
∪
2
2
2(x − x) > −x
−2(x − x) > x
2(x2 − x) > x
(
Risolviamo i tre sistemi:
(
x≤0
0<x<1
∪
2
2x − 2x + x > 0
−2x2 + 2x − x > 0
(
⇔
(
⇒
da cui
∪
(
x≤0
x(2x − 1) > 0
(
⇒
(
x≤0
2x2 − x > 0
∪
x≤0
x<0 ∨ x>
0<x<1
−2x2 + x > 0
1
2
∪
0<x<1
0 < x < 12
(
x≥1
2x2 − 3x > 0
∪
(
∪
(
∪
1
3
∪ x>
{x < 0} ∪ 0 < x <
2
2
cioè
(4.12)
x≥1
2x2 − 2x − x > 0
∪
0<x<1
x(−2x + 1) > 0
(
(
1
3
x< ,x,0 ∪ x>
.
2
2
49
x≥1
x(2x − 3) > 0
x≥1
x<0 ∨ x>
3
2
In alternativa, avremmo potuto risolvere la disequazione
osservando che
2|x2 − x| > |x|
⇔
2|x(x − 1)| > |x|
⇔
2|x − 1| > 1 ,
2|x||x − 1| > |x|
⇔
con x , 0
essendo |x| > 0 . Quindi in questo caso dobbiamo risolvere
1
,
2
e si procede cosı̀ con il metodo usuale, ottenendo le soluzioni come
nell’esempio 4.12.
x , 0, 2|x − 1| > 1
⇔
x , 0, |x − 1| >
Esempio 4.15. Risolvere la disequazione
x − 1 x − 7 > 1 .
Ovviamente, si pone x , 7 . Inoltre, poiché |x − 7| > 0 s2 x , 7 la
disequazione precedente è equivalente a
|x − 1| > |x − 7|, x , 7,
le cui soluzioni si ottengono risolvendo
(
x<1
1−x>7−x
(
∪
1≤x<7
x−1>7−x
(
∪
x>7
x − 1 > x − 7.
Quindi:
(
x<1
1>7
(
∪
1≤x<7
x>4
(
∪
x>7
,
1<7
ed osservando che il primo sistema è impossibile, si ottiene che
l’insieme delle soluzioni della disequazione è dato da
{4 < x < 7} ∪ {x > 7}
cioè
{x > 4 , x , 7} .
Esempio 4.16. Risolvere la disequazione
(x + 1)2 < |x2 − 1| .
50
Anzitutto osserviamo che
|x2 − 1| = |x − 1||x + 1| ,
e che x = −1 non è soluzione, quindi la disequazione data è
equivalente a
|x + 1| < |x − 1|
che ha per soluzioni {x < −1} ∪ {−1 < x < 0}, ossia
{x < 0 , x , −1} .
4.8. Disequazioni irrazionali
Ricordiamo che una disequazione si dice irrazionale quando in essa
compaiono uno o più radicali contenenti l’incognita.
Per risolvere una disequazione irrazionale, si cerca si trasformarla
in una razionale elevando alla stessa potenza ambo i membri della
disequazione. Occorre tuttavia fare una distinzione, dovuta al diverso comportamento delle funzioni xn a seconda che n sia pari o dispari
(vedi par. 3.2). Si ottiene una disequazione equivalente a quella di
partenza:
• elevando a una potenza dispari entrambi i membri;
• elevando a una potenza pari entrambi i membri, se entrambi
i membri sono non negativi. In quest’ultimo caso però vanno
aggiunte tutte le disequazioni che esprimono le condizioni
di realtà dei radicali.
Vediamo alcuni semplici esempi.
Esempio 4.17. Risolvere la disequazione irrazionale
√
9x2 − 42x + 40 < 3x − 1.
In questo caso, eleviamo al quadrato entrambi i membri, ottenendo
la disequazione
9x2 − 42x + 40 < (3x − 1)2 ⇔ 36x − 39 > 0.
51
Occorre però tener conto del fatto che deve essere 9x2 −42x+40 ≥ 0, in
modo tale che il primo membro della disequazione di partenza abbia
senso; inoltre deve anche essere 3x − 1 > 0 perché il membro di destra
della disequazione di destra è maggiore della radice quadrata al
primo membro, che è una quantità necessariamente non negativa. Ne
consegue che la disequazione di partenza è equivalente al seguente
sistema:
36x − 39 > 0,
2
9x − 42x + 40 ≥ 0,
3x − 1 > 0.
Si dimostra facilmente che la prima disequazione è verificata dagli x
13
tali che x > 12
, la terza dagli x tali che x > 13 , e la seconda dagli x ≤ 43
e dagli x ≥ 103 . L’insieme degli x che verifica la disequazione è quindi
dato da
4
10
13
<x≤
∪ x≤
.
12
3
3
Esempio 4.18. Risolvere la disequazione irrazionale
√
2 − x2 > 2x − 1 .
Costruiamo i due sistemi
(
2 − x2 ≥ 0
2x − 1 < 0
(
∪
2x − 1 ≥ 0
.
2 − x2 > (2x − 1)2
Nel primo sistema supponiamo che il secondo membro della disequazione sia negativo. Di conseguenza, essendo il primo membro
positivo per definizione di radice quadrata, la disequazione, nel suo
dominio di esistenza, è sempre verificata. Nel secondo sistema, invece, supponiamo che il secondo membro della disequazione sia
positivo e possiamo quindi elevare entrambi i membri al quadrato
(la condizione di esistenza della radice quadrata in questo caso è
ovviamente superflua).
Risolviamo ora i due sistemi:
√
√
2
<
x
<
2
−
1
x<
2
∪
52
1
x≥
2
5x2 − 4x − 1 < 0
1
x≥ 2
∪
1
− < x < 1,
5
√
1
1
− 2≤x<
∪
≤x<1 ,
2
2
√
1
− 2≤x<
2
da cui
cioè
n √
o
− 2≤x<1 .
Esempio 4.19. Risolvere la disequazione
√3
8x3 − 7 < 2x − 1 .
Eleviamo al cubo entrambi i membri della disequazione:
8x3 − 7 < (2x − 1)3
⇔
8x3 − 7 < 8x3 − 12x2 + 6x − 1
⇔
−12x2 + 6x + 6 > 0
⇔
2x2 − x − 1 < 0
ed essendo ∆ = 1 + 8 = 9 > 0 , si ottiene l’insieme delle soluzioni
1
{− < x < 1} .
2
Esempio 4.20. Risolvere la disequazione irrazionale
√
√
3x2 − 1 > x2 − 3 .
Essa è equivalente al sistema:
3x2 − 1 ≥ 0
2
x −3≥0
3x2 − 1 > x2 − 3
(
⇔
x2 − 3 ≥ 0
2x2 + 2 > 0.
Poiché 2x2 + 2 > 0 è sempre verificata, il sistema precedente è
equivalente alla disequazione
x2 − 3 ≥ 0 ,
le cui soluzioni sono
√
{x ≤ − 3}
∪
53
{x ≥
√
3} .
Esempio 4.21. Risolvere la disequazione irrazionale
√3
√6
x − 1 + x − 1 − 2 < 0.
Osserviamo che, in generale, per a ≥ 0 , si ha
√6
√3
1
2
1
( a)2 = (a 6 )2 = a 6 = a 3 = a ,
√6
come vedremo nel prossimo capitolo. Ponendo x − 1 = t , e
lavorando sotto l’ipotesi x − 1 ≥ 0 , la disequazione diventa
t2 + t − 2 < 0 ,
essendo ∆ = 1 + 8 = 9 , si ottiene l’insieme delle soluzioni
{−2 < t < 1} .
Quindi,
x−1≥0
√6
x−1<1
√
6 x − 1 > −2
(
⇔
x≥1
x−1<1
da cui
{1 ≤ x < 2} .
54
(
⇔
x≥1
x<2
CAPITOLO 5
Funzioni esponenziali e logaritmiche
Questo capitolo si sviluppa attorno alla funzione esponenziale e a quella logaritmica, e presenta alcuni esempi di equazioni e
disequazioni esponenziali e logaritmiche.
5.1. Funzione esponenziale
Alla scuola media ci hanno insegnato che, dato a ∈ R , n ∈ N ,
n ≥ 2, si dice potenza n-esima di a , il numero
an = a · a · ... · a ,
dato dal prodotto di n fattori tutti uguali ad a . Quindi, a1 = a, a2 = a·a,
e cosı̀ via. Il numero a è detto base e n è chiamato esponente.
Direttamente dalla definizione si provano le seguenti proprietà:
Proposizione 5.1. Per ogni m, n ∈ N \ {0}, per ogni a, b ∈ R \ {0} si
ha:
(1)
(2)
(3)
(4)
an+m = an · am ,
(a · b)n = an · bn ,
(an )m = am·n ,
n
n > m ⇒ aam = an−m .
Fissiamo ora a ∈ R \ {0}, e cerchiamo di estendere la definizione
di ax , che per ora conosciamo solo nel caso in cui x ∈ N \ {0}. Affinché
la (4) della proposizione 5.1 valga senza l’ipotesi n > m, si pone
a0 = 1,
a−n =
1
,
an
∀n ∈ N.
Questo ci permette quindi di dare significato a ax nel caso x ∈ Z.
55
Ora cerchiamo di estenderci al caso in cui x ∈ Q, cioè x =
1
aq ,
p
q
con
1
p, q interi., q , 0. Per cominiciare, poniamo y =
da cui yq = (a q )q .
Affinché le proprietà della proposizione 5.1 valgano anche quando
gli esponenti sono numeri razionali, occorre quindi che
q
1
yq = (a q )q = a q = a1 = a,
il che implica che y deve essere la radice q–ma di a (vedi paragrafo
3.3). Questo fatto pone delle limitazioni, perché nel caso in cui q sia
pari, la base deve essere per forza positiva (si ricordi l’osservazione
3.9). Stante questa limitazione, poniamo per definizione
√q
a1/q = a.
Infine, volendo poi definire la potenza con esponente razionale, Se
p/q ∈ Q , con p, q primi tra loro, si pone
√q
p
a q = ap .
sempre affinché le proprietà della proposizione 5.1 siano vere anche per esponenti in Q. Per evitare i problemi legati al segno del
radicando, si supporrà d’ora in poi che a > 0.
5.1.1. Un modo alternativo di vedere le cose. Quanto detto sopra ci permette di definire in modo rigoroso, fissato a ∈ R+ , una
funzione
ax : Q −→ R.
Un modo diverso per costruire la funzione esponenziale parte dall’idea di voler determinare le funzioni da R in R che mandano somme
in prodotti, ossia le funzioni f : R → R tali che
f (x + y) = f (x) · f (y), ∀x, y ∈ R.
(5.1)
Intanto si ha
• f (1 + 1) = f (1) · f (1) = ( f (1))2 ;
• se n ∈ N ,
f (n) = f (1 + 1 + ... + 1) = f (1) · f (1 + 1 + ... + 1) = ( f (1))n ;
| {z }
| {z }
n volte
n−1 volte
56
Si pone f (1) = a cosı̀ ( f (1))n = an per ogni n ∈ N.
Si noti che f (0 + 0) = f (0) · f (0), ossia
( f (0))2 = f (0).
Dunque f (0) = 1 oppure f (0) = 0. Se scegliamo f (0) = 0 si ottiene
f (0 + x) = f (x) · f (0) = 0 ∀x ∈ R.
Quindi, poiché vogliamo anche funzioni diverse dalla funzione
identicamente nulla, scegliamo f in modo che f (0) = 1.
Se m = −n , n ∈ N , allora deve essere
1 = f (0) = f (n + (−n)) = f (n) · f (−n),
per cui siamo obbligati a porre
(5.2)
f (−n) =
1
1
= n.
f (n) a
Con questa definizione si dimostra, riconducendoci ai risultati noti
in N, che la proposizione 5.1 vale per esponenti in Z. Inoltre, Se fosse
f (1) = a = 0, dovremmo avere, per ogni x ∈ R,
f (x) = f (1 + (x − 1)) = f (1) · f (x − 1) = 0 · f (x − 1) = 0,
e quindi scegliamo a , 0.
In realtà, per poter definire f su tutti i razionali dovremo scegliere
a > 0. Infatti
!!q
1
1
1 1
,
f (1) = f ( + + ... + ) = f
q q
q
q
|
{z
}
q volte
!
1
che è positivo se q è pari. Poniamo f
= y . Si ha
q
yq = f (1) > 0
e pertanto possiamo ricavare y = f ( 1q ) in funzione di f (1) ponendo
!
p
1
1
q
f
= ( f (1)) q ≡ f (1) .
q
(La soluzione nel caso pari si prende > 0, dato che nel caso dispari
c’è solo la soluzione > 0).
57
Sia ora r > 0 un numero razionale qualsiasi:
p
r = , p, q > 0 .
q
Deve essere
!
!
!!p
p
p
p
1
1 1
1
1
q
f (1) .
(5.3) f
= f p·
= f ( + + ... + ) = f
=
q
q
q q
q
q
|
{z
}
p volte
Se r > 0 si sfrutta il fatto che deve essere 1 = f (0) = f (r) f (−r).
pn
Osservazione 5.2. La definizione (5.3) è ben data. Infatti se r = qn
con n numero naturale non nullo, è una diversa ”rappresentazione”
p
del numero reale r = q (p, q > 0), si ha
f (r) = f (
Ma la relazione
√
(
è equivalente a
√
[(
qn
qn
√
pn
qn
) = ( a)pn .
qn
√q
a)pn = ( a)p
√q
a)pn ]qn = [( a)p ]qn ,
per la stretta monotonia della funzione xm con m ∈ Z.
Ma dalla (3) di Proposizione 5.1 e dalla definizione di radice
n–esima si ottiene
√
√
qn
qn
[( a)pn ]qn = [( a)qn ]pn = apn
e
√q
√q
[( a)p ]qn = [( a)q ]pn = apn .
Osservazione 5.3. Nella definizione di esponenziale con esponente razionale, l’ordine con cui si esegue l’elevamento a potenza e
si estrae la radice non ha importanza. Infatti
√q
√q
( a)p = ap
è equivalente a
√q
√q
[( a)p ]q = ( ap )q .
58
E tale uguaglianza è vera come si verifica usando la (3) di
Proposizione 5.1.
Osservazione 5.4. Con la stessa tecnica usata nelle osservazioni
precedenti si dimostra che in effetti la Proposizione 5.1 vale anche
per esponenti in Q.
Osservazione 5.5. Dalla definizione segue subito che
ar > 0, ∀r ∈ Q.
Inoltre abbiamo
a > 1 ⇒ (ar > 1 ⇔ r > 0).
Infatti sia
p
> 0.
q
Possiamo supporre p , q > 0 , ossia p , q ∈ N \ {0} . Abbiamo
√q
ar = ( a)p
r=
con a > 1. Osserviamo che
a>1
infatti
√q
a>1
⇒
√q
⇔
a > 1;
a > 1q = 1 .
Ma per ogni b > 1, bp > 1p = 1 e questo vale in particolare se
√
b = q a.
Invece se r < 0, prendendo q > 0 e p < 0 si dimostra in modo
√
simile che ( q a)p < 1.
Proposizione 5.6. Se a > 1 , allora la funzione f (x) = ax è strettamente
crescente in Q, cioè
x1 < x2 ,
x1 , x2 ∈ Q
⇒
ax1 < ax2 .
Dimostrazione. La tesi equivale a
a −a >0
x2
x1
x1
a
⇔
59
ax2
− 1 > 0.
ax1
Ma
1
ax1
= a−x1 per ogni x1 ∈ Q, quindi
x2
x1 a
a
− 1 = ax1 (ax2 · a−x1 − 1) = ax1 (ax2 −x1 − 1) > 0
x
1
a
⇔
ax2 −x1 > 1 ,
da cui la tesi.
Consideriamo f (x) = ax , con a > 0 . Cosa succede se x ∈ R \ Q ?
√
Esempio 5.7. Sia ad esempio x = 2 . Mi è capitato tante volte di
sentirmi dire dagli studenti che
√
a
2
a · a · ... · a ,
| {z }
√
” 2 volte”
cosa che ovviamente è PAZZESCA.
Si utilizzerà il fatto che ogni numero reale può essere approssimato con una ”successione” di numeri razionali. Sia xn una successione
di numeri razionali che ”approssima” x numero reale. Nel corso di
Analisi 1 studieremo il comportamento di axn per arrivare a definire
ax su ogni numero reale.
Sia a > 1 . Il grafico della funzione f (x) = ax è in figura 1.
Figura 5.1. La funzione esponenziale ax nel caso a > 1.
60
Sia 0 < a < 1 . Si ha
0<a<1
⇒
a−1 > 1 .
Quindi, (a−1 )x = a−x è un caso simile al precedente. Se si cambia il
segno della x , il grafico è simmetrico rispetto all’asse y . Quindi, in
questo caso, il grafico della funzione esponenziale è quello di figura
2.
Figura 5.2. La funzione esponenziale ax nel caso 0 <
a < 1.
5.2. Funzione logaritmica
Durante il corso di Analisi 1 verificheremo anche che la funzione
esponenziale f (x) = ax , f : R → R+ è una funzione biunivoca: quindi essa è invertibile. La funzione inversa viene chiamata funzione
logaritmica in base a e si indica con
loga : R+ → R
Per definizione, il loga x è l’unico y tale che a y = x . In altre parole,
il logaritmo in base a di x è l’esponente da attribuire alla base a per
ottenere l’argomento x .
Il grafico della funzione logaritmica si ottiene da quello della
funzione esponenziale, osservando che, dato il grafico di una certa
61
funzione, il grafico della funzione inversa si ottiene simmetrizzando
rispetto alla bisettrice del I e III quadrante, cioè alla retta y = x
rappresentata in Figura 3.1):
Figura 5.3. Il grafico della funzione loga x nel caso a > 1.
Figura 5.4. Il grafico della funzione loga x nel caso a < 1.
Di seguito, vengono riportate alcune proprietà della funzione
logaritmica (definita per ogni base , 1). Esse sono conseguenza delle
proprietà della funzione esponenziale che abbiamo dimostrato per
gli esponenti razionali, ma che, come vedremo nel corso di Analisi
1, valgono per tutti gli esponenti reali. Per le proprietà dimostrate di
seguito si supporrà sempre a, b, c ∈ R+ \ {1} e x, y ∈ R+ .
62
Cominciamo dalla
Proprietà 5.8.
aloga x = x,
che è una immediata conseguenza del fatto che il logaritmo in
base a è la funzione inversa della funzione esponenziale di base a.
Proprietà 5.9.
loga xy = loga x + loga y,
cioè il logaritmo trasforma un prodotto in una somma (mentre l’esponenziale
trasforma somme in prodotti: ax+y = ax · a y ).
Dimostrazione. Dimostrare la proprietà è equivalente a
verificare
aloga xy = aloga x+loga y
ma
aloga xy = xy
e
aloga x+loga y = aloga x · aloga y = xy .
Proprietà 5.10.
loga
1
= − loga x.
x
Dimostrazione. Dimostriamo la proprietà equivalente
loga
1
+ loga x = 0 ;
x
che segue dal fatto che
loga
1
1
+ loga x = loga
· x = loga 1 = 0.
x
x
Come conseguenza delle due proprietà precedenti, segue la
Proprietà 5.11.
loga
x
= loga x − loga y .
y
63
Inoltre abbiamo
Proprietà 5.12.
loga xα = α loga x, ∀α ∈ R.
Dimostrazione. Dimostriamo che
α
aloga x = aα loga x
ma quest’ultima equivalenza e vera se e solo se
xα = (aloga x )α
⇔
xα = xα
e ciò conclude la dimostrazione.
Proprietà 5.13.
loga b =
1
= − log 1 b .
a
logb a
Dimostrazione. Dimostriamo prima che
loga b =
1
.
logb a
Ciò equivale a
loga b · logb a = 1
⇔
aloga b·logb a = a
logb a
aloga b
=a
⇔
blogx b = a
⇔
a = a.
⇔
Dimostriamo poi che
1
= − log 1 b .
a
logb a
Ciò equivale a
(logb a)(log 1 b) = −1
⇔
a
⇔
log 1 b !logb a −1
1
1
a
=
a
a
⇔
blogb a = a
⇔
a = a.
64
Proprietà 5.14.
loga b = loga c · logc b .
Dimostrazione. Si ha che
loga b = loga c · logc b
⇔
aloga b = aloga c·logc b
logc b
b = aloga c
⇔
b = clogc b
⇔
b = b.
⇔
5.3. Disequzioni logaritmiche
In questo paragrafo risolveremo alcune disequazioni con l’incognita che compare nell’argomento di uno o più logaritmi, ricordando
che se la base è > 1 il logaritmo è strettamente crescente, mentre se la
base è in ]0, 1[ il logaritmo è strettamente decrescente.
Esempio 5.15. Risolvere la disequazione
log3 x <
1
.
2
Svolgimento:
∃!x0 : log3 x0 =
1
2
che è caratterizzato da
1
3log3 x0 = 3 2
⇔
x0 =
√
3.
Quindi l’insieme delle soluzioni della disequazione è
√
{0 < x < 3} .
65
Esempio 5.16. Risolvere la disequazione
log 1 (x2 + 4x) > −1 .
5
Svolgimento:
∃!x0 : log 1 x0 = −1 ,
5
e
−1
1
x0 =
= 5.
5
Poiché 0 < 51 < 1, dobbiamo risolvere il sistema
(
(
x2 + 4x > 0
x(x + 4) > 0
⇔
⇔
2
x + 4x < 5
x2 + 4x − 5 < 0
(
x < −4 ∨ x > 0
−5 < x < 1
le cui soluzioni sono
{−5 < x < −4} ∪ {0 < x < 1} .
Esempio 5.17. Risolvere la disequazione
log2 x2 (x2 − 2) < 3 .
Svolgimento:
∃!x0 : log2 x0 = 3 , cioè x0 = 23 = 8 .
Le soluzioni della disequazione sono quindi le soluzioni del sistema
(
x2 (x2 − 2) > 0
x2 (x2 − 2) < 8 .
Esempio 5.18. Risolvere la disequazione
log2 x2 > log2 x .
Abbiamo
log2 x2 > log2 x
⇔
2 log2 x > log2 x
cioè {x > 1} , perché la base 2 è maggiore di 1.
66
⇔
log2 x > 0
5.4. Disequazioni esponenziali
Una disequazione si dice esponenziale se l’incognita compare
all’esponente di una o più potenze.
Esempio 5.19. Risolvere la disequazione esponenziale
4x > 2 .
L’equazione può essere riscritta nella forma
22x > 2
2x > 1
⇔
⇔
x>
1
.
2
Esempio 5.20. Risolvere la disequazione
x(1−12x)
1
(5.4)
< 3.
3
Svolgimento:
x(1−12x) −1
1
1
<
3
3
x(1 − 12x) > −1
⇔
perché ( 31 )z è strettamente decrescente, e risolvendo l’ultima
disequazione si trovano le soluzioni della (5.4).
Esempio 5.21. Risolvere la disequazione
2
8x+1 ≥ 2x .
Svolgimento:
8x+1 ≥ 2x
2
⇔
2
23(x+1) ≥ 2x
⇔
3(x + 1) ≥ x2
da cui si ricavano le soluzioni della disequazione iniziale.
Esempio 5.22. Risolvere la disequazione
24x −5x +1 < 1 .
4
2
Svolgimento:
24x −5x +1 < 1
4
2
⇔
24x −5x +1 < 20
4
2
⇔
4x4 − 5x2 + 1 < 0
e risolvendo si trovano le soluzioni della disequazione iniziale.
67
Esempio 5.23. Risolvere la disequazione
2|x−1| < 2x .
Svolgimento:
2|x−1| < 2x
|x − 1| < x
⇔
e risolvendo si trovano le soluzioni della disequazione iniziale.
Esempio 5.24. Risolvere la disequazione
4x + 2x − 2 < 0 .
Svolgimento: osserviamo che
4x = 22x = (2x )2
quindi la disequazione diventa
(2x )2 + 2x − 2 < 0 ,
da cui, ponendo 2x = t si ottiene
t2 + t − 2 < 0
(
⇔
2 > −2
2x < 1
⇔
(
x
⇔
−2 < t < 1
x∈R
x<0
⇔
{x < 0} .
5.5. Disequazioni trascendenti: ulteriori esempi
Esempio 5.25. Risolvere la disequazione
2
(x + 1)x −1 > 1 .
Svolgimento: poniamo la condizione di esistenza
x+1>0
⇔
x > −1 .
Si ha
2
(x + 1)x −1 > 1
x2 −1
> 2log2 1
⇔
2log2 (x+1)
⇔
(x2 − 1) log2 (x + 1) > 0 .
⇔
2
2(x −1) log2 (x+1) > 20
Studiamo il segno dei fattori (nel nostro insieme di esistenza)
x2 − 1 > 0
⇔
68
x>1
log2 (x + 1) > 0
⇔
x+1>1
x > 0.
⇔
Quindi le soluzioni sono {−1 < x < 0} ∪ {x > 1} .
Esempio 5.26. Risolvere la disequazione
(5.5)
logx−2 (2x2 − 13x + 21) > 0 .
Svolgimento: poniamo la condizione di esistenza
(x − 2 > 0) ∧ (x − 2 , 1)
⇔
x > 2 ∧ x , 3.
Ora, se chiamiamo 2x2 − 13x + 21 = b , si ha
log2 (2x2 − 13x + 21)
log2 b
=
.
logx−2 b = logx−2 · log2 b =
log2 (x − 2)
log2 (x − 2)
Quindi la disequazione (5.5) è equivalente alla disequazione
log2 (2x2 − 13x + 21)
> 0.
log2 (x − 2)
Studiamo separatamente il segno del numeratore e del denominatore
del primo membro.
log2 (2x2 −13x+21) > 0
⇔
2x2 −13x+21 > 1
2x2 −13x+20 > 0 ,
⇔
ed essendo ∆ = 169 − 160 = 9 , si ottengono le soluzioni
{x < 25 } ∪ {x > 4} . Studiamo il segno del denominatore:
log2 (x − 2) > 0
⇔
x−2>1
⇔
x > 3.
Quindi le soluzioni della disequazione iniziale sono
5
< x < 3 ∪ {x > 4} .
2
69
CAPITOLO 6
Elementi di trigonometria
Questo capitolo si sviluppa attorno alle funzioni trigonometriche,
delle quali vengono presentate le principali proprietà, dopo aver
discusso sulla loro definizione. Vengono poi presentati alcuni esempi
di equazioni e disequazioni trigonometriche.
6.1. Funzioni trigonometriche
Figura 6.1.
Sia P un punto sulla circonferenza ”goniometrica” {x2 + y2 = 1}.
La misura dell’angolo AÔPr è per definizione la lunghezza del settore
_
circolare APr percorso in senso antiorario. Se invece si percorre l’arco
in senso orario la misura dell’angolo ha il segno opposto.
_
l(APr ) = misura dell’angolo AÔPr
70
2π = lunghezza dell’intera circonferenza
π = lunghezza della semicirconferenza
Nota 6.1. Una precisazione a questo punto è doverosa: per poter
trattare questa parte in modo rigoroso, occorrerebbe anzitutto definire il concetto di lunghezza di una curva. Inoltre dato x ∈ [0, 2π[ occorrerebbe mostrare che esiste un unico Px ∈ {x2 + y2 = 1} sulla circon_
_
ferenza goniometrica tale che l(APx ) = x con il settore APx , percorso
in senso antiorario (l’unicità è dovuta alla stretta crescenza della lunghezza dell’arco viaggiando in senso antiorario sulla circonferenza
goniometrica).
_
Sia x ∈ [0, 2π[ , e Px tale che l(A P x ) = x (vedere la figura che
segue).
Figura 6.2.
Definizione 6.2. Si dice seno dell’angolo x l’ordinata del punto Px
associato a x nella circonferenza goniometrica.
Definizione 6.3. Si dice coseno dell’angolo x l’ascissa del punto Px
associato a x nella circonferenza goniometrica.
71
Le funzioni sin x e cos x si estendono per periodicità nel seguente
modo:
sin(x + 2kπ) = sin(x) ∀x ∈ R , ∀k ∈ Z ,
cos(x + 2kπ) = cos(x) ∀x ∈ R , ∀k ∈ Z ;
Osservazione 6.4. Come si può intuire (vedi la Nota 6.1)
guardando la Figura 6.3, vale la seguente proprietà:
_
_
l(AQ) > l(AP) .
Figura 6.3.
Di seguito elenchiamo alcune delle principali proprietà che
coinvolgono le funzioni trigonometriche.
• Identità fondamentale della trigonometria:
sin2 x + cos2 x = 1 ;
• le funzioni seno e coseno sono limitate:
| sin(x)| ≤ 1
∀x ∈ R ,
| cos(x)| ≤ 1
∀x ∈ R .
Nel seguito, indichiamo con AB la lunghezza del segmento [A.B]
di estremi A e B. Chiamiamo −Px il punto simmetrico rispetto all’asse
x di un punto Px della circonferenza goniometrica che si trova nel
primo quadrante (vedi figura 6.4). Ovviamente anche −Px è un punto
della circonferenza goniometrica. Poiché il segmento [Px . − Px ] ha
72
Figura 6.4.
lunghezza minore di qualunque altra curva che unisce i due punti,
ed essendo
_
−Px Px = 2 sin x , l(−Px Px ) = 2x
si ottiene che
(6.1)
⇒
| sin x| < |x|
π π
\ {0} .
∀x ∈ − ,
2 2
Si ricordi che si adotta la seguente convenzione: quando x > 0 ,
l’angolo è misurato in senso antiorario, se invece x < 0 l’angolo è
misurato in senso orario (vedere la figura che segue).
Figura 6.5. Il punto P−x individuato dall’angolo −x
(in radianti) coincide col punto −Px , simmetrico di Px
rispetto all’asse x.
Osservazione 6.5. Si osservi che, per provare la (6.1), si può alternativamente sfruttare il fatto che, detto A il punto di coordinate
73
_
(1, 0) l’area del settore circolare individuato dall’arco APx è maggio4
re dell’area del triangolo OAPx . Occorre però sapere che l’area del
settore circolare è pari a x2 , cioè che l’area del settore circolare è direttamente proporzionale all’angolo x, cosa che è di nuovo collegata
alla definizione di lunghezza di una curva.
Proprietà 6.6. La funzione seno è dispari,
sin(−x) = − sin x , ∀x ∈ R,
mentre la funzione coseno è pari, cioè
cos(−x) = cos x , ∀x ∈ R.
Nelle due figure seguenti abbiamo i grafici qualitativi delle
funzioni seno e della funzione coseno.
Figura 6.6. Grafico qualitativo di sin x.
Essi li possiamo ottenere osservando direttamente come variano il seno ed il coseno mentre si percorre in senso antiorario la
circonferenza goniometrica.
Adesso possiamo definire la funzione tangente di un angolo.
74
Figura 6.7. Grafico qualitativo di cos x.
Definizione 6.7. Sia x ∈ [0, 2π[. Si definisce tangente di un angolo
la funzione
x , π2 , x , 3π
2
tan x =
sin x
.
cos x
In figura, la tangente dell’angolo α è l’ordinata del punto T che
coincide con la lunghezza del segmento [A, T].
Figura 6.8. Definzione della tangente di un angolo.
Proprietà 6.8. La funzione tangente è periodica di periodo π , infatti
π
tan(x + kπ) = tan x ∀x ∈ R \
+ kπ , k ∈ Z .
2
75
Dimostrazione. Intanto osserviamo che per ogni k ∈ Z, sin(x +
kπ) = sin x se k è pari, mentre sin(x + kπ) = − sin x se k è dispari.
Analogamente cos(x + kπ) = − cos x se ki è pari,h mentre cos(x + kπ) =
cos x se k è dispari. Allora per ogni x ∈ − π2 , π2 . Si ha
tan(x + kπ) =
sin(x + kπ)
;
cos(x + kπ)
e quindi
tan(x + kπ) = tan x ,
come si verifica immediatamente distinguendo tra k pari e k dispari.
Prima di presentare la proprietà di monotonia stretta della
tangente, ricordiamo una proprietà di carattere più generale:
Lemma 6.9. Siano f , g : A ⊂ R → R+ \ {0} due funzioni strettamente
crescenti. Allora f · g è strettamente crescente.
Dimostrazione. Siano x1 < x2 ∈ A . Vogliamo dimostrare che
f (x1 )g(x1 ) < f (x2 )g(x2 ) . Per iniziare osserviamo che x1 < x2 implica,
per la stretta crescenza di f , che f (x1 ) < f (x2 ). Ricordiamo che, presi
a, b, c numeri positivi, si ha che a < b ⇒ ac < bc. Dunque si ha
f (x1 )g(x1 ) < f (x2 )g(x1 ).
Ma poiché anche g è strettamente crescente, g(x1 ) < g(x2 ) da cui,
moltiplicando per f (x2 ), si ha
g(x1 ) f (x2 ) < g(x2 ) f (x2 )
e dunque si ottiene quanto si voleva provare combinando le due
disuguaglianze ottenute.
Proprietài 6.10. hLa funzione tangente è strettamente crescente
nell’intervallo − π2 , π2 .
76
h
h
Dimostrazione. Nell’intervallo 0, π2 la funzione seno è positiva e strettamente crescente, la funzione coseno è positiva ma strettamente decrescente. Quindi, dalla Proposizione 3.5, la funzione
1
è positiva e strettamente crescente. Pertanto, per la Proprietà
cos x
6.9, la funzione tangente, essendo
h il hprodotto delle funzioni sin x e
1
, è strettamente crescente in 0, π2 , e poiché è dispari, lo è anche
cos x
i
nell’intervallo − π2 , 0] .
Il grafico qualitativo della funzione tangente è allora quello nella
figura seguente:
Figura 6.9. Grafico qualitativo di tan x.
Osservazione 6.11. Le proprietà di monotonia delle funzioni sin x,
cos x e tan x (quando si restringe il dominio di tali funzioni ad un intervallo opportuno) è per definire le funzioni inverse di queste funzioni trigonometriche. Ad esempio, restringendo il dominio della
funzione sin x all’intervallo [−π/2, π/2], si prova che la funzione è
strettamente crescente (e dunque iniettiva) e suriettiva, dunque biettiva e perciò invertibile. L’inversa di questa restrizione è chiamata
funzione arcoseno,
π π
arcsin x : [−1, 1] −→ − ,
,
2 2
il cui grafico è mostrato in Figura 6.10.
In altre parole, arcsin x è l’angolo, compreso tra −π/2 e π/2, il cui
seno è pari ad x.
77
π
2
1
-1
-
π
2
Figura 6.10. Grafico qualitativo di arcsin x.
Analogamente si ragiona restringendo il dominio di cos x
all’intervallo [0, π], ottenendo la funzione arcocoseno
arccos x : [−1, 1] −→ [0, π] ,
il cui grafico è mostrato in Figura 6.11.
π
π
2
1
-1
Figura 6.11. Grafico qualitativo di arccos x.
Infine, anche la funzione tangente è invertibile nell’intervallo ] −
π/2, π/2[ (si veda la Proprietà ), e la sua funzione inversa è detta
arcotangente,
π π
arctan x : R → − ,
,
2 2
78
e il suo grafico è mostrato in Figura 6.12.
π
2
-10
5
-5
-
10
π
2
Figura 6.12. Grafico qualitativo di arctan x.
Rimarchiamo il fatto che le restrizioni fatte sopra per invertire le
funzioni trigonometriche sono fissate per convenzione. Sarebbe stato
del tutto lecito, ad esempio, invertire la funzione sin x restringendone
il dominio all’intervallo [π/2, 3π/2].
π
, individuato dal punto Px della
Osservazione 6.12. Sia x ∈ 0,
2
circonferenza goniometrica (vedi Figura 6.13). Sappiamo che
OA = 1 ,
4
4
e, grazie alla similitudine dei triangoli Px 0Hx e Tx 0A, per ogni x ∈]0, π2 [
si ha:
Hx Px ATx
=
,
OHx
OA
da cui, come abbiamo già detto,
tan x =
sin x
= ATx .
cos x
Inoltre, come vedremo tra poco
(6.2)
P1x P2x < Q1x Q2x , ∀x ∈]0,
79
π
[
2
Figura 6.13. Dimostrazione della (6.3).
da cui si ricava (usando necessariamente la definizione di lunghezza
di una corda)
x < ATx = tan x
Dunque
x < tan x
(6.3)
π
∀x ∈ 0,
.
2
Per verificare (6.2) si costruisca il trapezio isoscele la cui base minore è
il segmento P1x P2x ed uno dei vertici della base maggiore è il punto Q2x ,
e si osservi che, in ogni trapezio isoscele, la base minore ha lunghezza
minore del segmento che unisce un vertice della base maggiore con
un punto qualsiasi del lato obliquo opposto.
Si osservi che, similmente a quanto visto nell’Osservazione 6.5,
per provare la (6.3), si può alternativamente sfruttare il fatto che l’a_
rea del settore circolare individuato dall’arco APx è minore dell’area
4
del triangolo OATx . Occorre però sapere che l’area del settore circolare è pari a 2x , cioè che l’area del settore circolare è direttamente
proporzionale all’angolo x.
80
Osservazione 6.13. Grazie a seno e coseno possiamo esprimere
la lunghezza dei cateti di un triangolo rettangolo in funzione dell’ipotenusa e degli angoli che essi formano con l’ipotenusa. Per la
similitudine dei triangoli indicati in figura
Figura 6.14.
AB = AC · cos α
BC = AC · sin α.
Infatti se , se AC0 = 1, si ha
BC
AC
=
B0 C0
C0 A
=
sin α
.
1
6.1.1. Formule di addizione e sottrazione.
(6.4)
cos(x + y) = cos x cos y − sin x sin y
(6.5)
cos(x − y) = cos x cos y + sin x sin y
(6.6)
sin(x + y) = sin x cos y + cos x sin y
(6.7)
sin(x − y) = sin x cos y − cos x sin y .
Dimostrazione.
• Dimostriamo la formula (6.5). Siano
81
Px = (cos x, sin x)
P y = (cos y, sin y)
P y−x = (cos(y − x), sin(y − x))
A = (1, 0)
come in figura.
Figura 6.15.
Poiché gli angoli negativi sono quelli misurati in senso orario, si
ha che la lunghezza del settore che congiunge A con P y−x è la stessa
del settore che congiunge Px con P y . Come vedremo nel corso di
analisi 1, archi di uguale lunghezza hanno estremi su segmenti di
uguale lunghezza, quindi
AP y−x = Px P y
(AP y−x )2 = (Px P y )2 .
⇒
Utilizzando la relazione sin2 x + cos2 x = 1 , si ottiene
(AP y−x )2 = (cos(y − x) − 1)2 + (sin(y − x))2
= cos2 (y − x) + 1 − 2 cos(y − x) + sin2 (y − x)
= 2 − 2 cos(y − x)
e
82
2
Px P y = (cos x − cos y)2 + (sin x − sin y)2
= cos2 x + cos2 y − 2 cos x cos y + sin2 x + sin2 y − 2 sin x sin y
= 2 − 2 cos x cos y − 2 sin x sin y ,
da cui la tesi.
• Dimostriamo la (6.4) .
cos(x + y) = cos(x − (−y)) = cos x cos(−y) + sin x cos(−y)
= cos x cos y − sin x sin y .
• Per dimostrare la (6.6) , utilizziamo le seguenti proprietà:
π
sin x = − cos x +
2
π
cos x = sin x +
2
(6.8)
(6.9)
Figura 6.16.
Si ha:
83
π
π
sin(x + y) = − cos x + y +
= − cos x + y +
2
2
π
π
− sin x sin y +
= − cos x cos y +
2
2
= − cos x(− sin y) − sin x cos y
= cos x sin y + sin x cos y .
• Infine, dimostriamo la formula (6.7):
sin(x − y) = sin(x + (−y))
= sin x cos(−y) + cos x sin(−y)
= sin x cos y − cos x sin y .
6.1.2. Formule di duplicazione.
(6.10)
cos 2x = cos2 x − sin2 x
(6.11)
sin 2x = 2 sin x cos x .
Siano
π
π
= a,
sin = b .
4
4
Applicando le formule di duplicazione, otteniamo:
π
1 = sin = 2ab
2
π
0 = cos = a2 − b2 .
2
Le condizioni sopra equivalgono al sistema
(
2ab = 1
a2 − b2 = 0 .
cos
La seconda equazione conduce alla relazione a = ±b ; scegliamo
a = b poiché siamo nel primo quadrante. Quindi, sostituendo nella
prima equazione, otteniamo
2a2 = 1
1
a=b= √ .
2
⇔
84
Pertanto abbiamo dimostrato che
√
π
π
2
(6.12)
sin = cos =
4
4
2
π
tan = 1 .
(6.13)
4
Determiniamo ora le formule per cos 3x e sin 3x usando quelle di
addizione e di duplicazione:
cos(3x) = cos(2x + x) = cos(2x) cos x − sin(2x) sin x
= (cos2 x − sin2 x) cos x − 2 sin2 x cos x
= cos3 x − sin2 x cos x − 2 sin2 x cos x
= cos3 x − 3 sin2 x cos x ;
sin(3x) = sin(2x + x) = sin(2x) cos x + cos(2x) sin x
= 2 sin x cos2 x + (cos2 x − sin2 x) sin x
= 2 sin x cos2 x + cos2 x sin x − sin3 x
= 3 sin x cos2 x − sin3 x
= 3 cos2 x sin x − sin3 x .
Siano
π
=a
6
π
sin = b .
6
Applicando le formule di triplicazione appena dimostrate, otteniamo
π
π
3x =
⇒ cos 3x = cos = 0 ,
2
2
da cui il sistema
(
a3 − 3ab2 = 0
3a2 b − b3 = 1 .
cos
Poiché a , 0 , possiamo dividere per a e ottenere
(
(
a2 = 3b2
a2 = 3b2
⇔
⇔
3 · 3b2 · b − b3 = 1
8b3 = 1
85
(
a2 = 3b2
b = 21
⇔
Abbiamo cosı̀ ottenuto
√
π
3
cos =
,
6
2
Osserviamo ora che
√
a=
b=
3
2
1
.
2
√
π
3
tan =
.
6
3
π 1
sin = ,
6
2
π π π
= − ,
3
2 6
quindi applicando le formule di addizione e sottrazione, segue che
π
π π
π π
π
π 1
cos = cos
−
= cos − +
= − sin −
= sin = ,
3
2 6
6 2
6
6
2
√
π
π π
π
π
3
sin = sin − +
= cos −
= cos =
,
3
6 2
6
6
2
π √
tan = 3 .
3
Quindi abbiamo provato che
√
π 1
π
3
π √
cos = , sin =
, tan = 3 .
3
2
3
2
3
Dimostriamo ora la seguente formula
tan(α + β) =
(6.14)
tan α + tan β
.
1 − tan α tan β
Anzitutto, si ha che
sin(α + β) sin α cos β + cos α sin β
=
cos(α + β) cos α cos β − sin α sin β
sin α cos β + cos α sin β
1
=
·
sin α sin β
cos α cos β
1 − cos α cos β
!
!
sin α cos β cos α sin β
1
=
·
+
1 − tan α tan β
cos α cos β cos α cos β
tan α + tan β
=
.
1 − tan α tan β
tan(α + β) =
Ricordando che la funzione tangente è dispari, si ottiene
(6.15)
tan(α − β) = tan(α + (−β)) =
86
tan α − tan β
,
1 + tan α tan β
cioè la formula che volevamo dimostrare.
Come caso particolare , se β = α , si ottiene
tan 2α =
(6.16)
2 tan α
;
1 − tan2 α
in quest’ultima, se 2α = β , si ha
β
2 tan 2
β ,
tan β =
1 − tan2 2
β
da cui, ponendo tan 2 = t , si ottiene
tan β =
2t
1 − t2
⇒
cos β =
1 − t2
1 + t2
sin β =
2t
.
1 + t2
Dimostriamo inoltre che
(6.17)
cos 2α =
1 − tan2 α
.
1 + tan2 α
cos2 α − sin2 α
cos2 α + sin2 α
sin2 α
cos2 α 1 − cos
2α
=
sin2 α
cos2 α 1 + cos
2α
cos 2α = cos2 α − sin2 α =
=
1 − tan2 α
.
1 + tan2 α
Dimostriamo ora che
(6.18)
sin 2α =
2 tan α
.
1 + tan2 α
87
2 sin α cos α
sin 2α = 2 sin α cos α =
sin2 α + cos2 α
sin α
cos2 α 2cos
α
2
=
sin α
+
1
cos2 α cos
2α
=
2 tan α
.
1 + tan2 α
6.2. Equazioni trigonometriche
6.2.1. Equazioni
seguenti equazioni:
trigonometriche
elementari. Risolvere
(1) sin x = 0 .
L’insieme delle soluzioni è
{x = kπ : k ∈ Z} .
Figura 6.17.
(2) cos x = 0
L’insieme delle soluzioni è
π
x = + kπ : k ∈ Z .
2
(3) sin x = 1 .
L’insieme delle soluzioni è
π
x = + 2kπ : k ∈ Z .
2
88
le
Figura 6.18.
(4) cos x = 1 .
L’insieme delle soluzioni è
{x = 2kπ : k ∈ Z} .
(5) sin x = 2 .
L’equazioni non ammette soluzioni, in quanto il seno è
sempre minore
o uguale a 1 .
√
3
(6) cos x = 2 .
Figura 6.19.
Graficamente si vede che x0 è simmetrico di
π . Quindi
x0 +
2
π
6
=π
⇒
x0 +
π
= 2π
6
89
⇒
x0 = 2π −
π
6
rispetto a
π 11
= π.
6
6
Pertanto l’insieme delle soluzioni dell’equazione è
π
11
x = + 2kπ , k ∈ Z ∪ x = π + 2kπ , k ∈ Z .
6
6
6.2.2. Equazioni trigonometriche di secondo grado.
(1) cos2 x + 3 sin x − 3 = 0 .
Riscriviamola esprimendo il coseno in funzione del seno per mezzo della prima identità fondamentale della
trigonometria:
1 − sin2 x + 3 sin x − 3 = 0 .
Ponendo t = sin x , si ottiene
t2 − 3t + 2 = 0
da cui
3±
t1,2 =
√
9−8
2
⇒
t1 = 1, t2 = 2 .
Quindi
{sin x = 1} ∨ {sin x = 2}
cioè
{x =
π
+ 2kπ , k ∈ Z} .
2
6.2.3. Ulteriori esempi di equazioni trigonometriche.
(1) tan x + sin x = 1 + cos x .
n
o
Condizione di esistenza: cos x , 0 , cioè x < π2 + kπ , k ∈ Z .
Utilizzando la definizione di tangente l’equazione diventa
⇒
sin x
+ sin x = 1 + cos x
cos x
sin x(1 + cos x) = cos x(1 + cos x)
⇒
(sin x − cos x)(1 + cos x) = 0
⇒
{sin x − cos x = 0} ∨ {1 + cos x = 0} .
Si ha
sin x − cos x = 0
1 + cos x = 0
⇔
⇔
tan x = 1
cos x = −1
90
⇔
⇔
π
x = + kπ , k ∈ Z ;
4
{x = π + 2kπ , k ∈ Z} .
Quindi le soluzioni dell’equazione sono
π
x = + kπ , k ∈ Z ∪ {x = π + 2kπ , k ∈ Z} .
4
(2) sin 2x − cos x = 0 .
Ricordando la formula di duplicazione per il seno, si ha
2 sin x cos x − cos x = 0
⇔
cos x(2 sin x − 1) = 0
⇔
cos x = 0 ∨ sin x − 1 = 0
π
π
5π
x = + kπ , k ∈ Z ∪ x = + 2kπ , k ∈ Z ∪ x =
+ 2kπ , k ∈ Z .
2
6
6
⇔
(3) 2 cos2 x + sin2 2x = 2 .
Dalla relazione fondamentale della trigonometria si ha
2 cos2 x + 4 sin2 x cos2 x = 2
2 cos2 x + 4(1 − cos2 x) cos2 x = 2
e ponendo cos2 x = t , si ottiene
2t + 4(1 − t)t = 2
2t + 4(1 − t)t − 2 = 0
−4t2 + 6t − 2 = 0
2t2 − 3t + 1 = 0
√
3± 9−8 3±1
=
⇒
t1,2 =
4
4
Quindi:
cos2 x = 1
∨
t=1 ∨ t=
⇒
cos2 x =
1
.
2
1
2
cioè
{x = kπ , k ∈ Z}
∪
π
π
x= +k , k∈Z .
4
2
(4) sin x + cos x = 1 .
Poniamo t = tan x2 e sfruttando le formule parametriche
sin x =
2t
,
1 + t2
cos x =
91
1 − t2
,
1 + t2
si ottiene
1 − t2
2t
+
=1
1 + t2 1 + t2
2t + 1 − t2 = 1 + t2
2t2 − 2t = 0
t = 0 ∨ t = 1.
⇒
Quindi:
• t=0
⇒
x
2
• t=1
⇒
x
=0
2
= κπ , k ∈ Z ⇒ x = 2kπ , k ∈ Z ;
x
⇒ tan = 1
2
π
π
= + κπ , k ∈ Z ⇒ x = + 2kπ , k ∈ Z .
4
2
⇒
x
2
tan
Riassumendo, le soluzioni dell’equazione sono
π
x = + 2kπ , k ∈ Z .
{x = 2kπ , k ∈ Z} ∪
2
Supponiamo in generale di avere una equazione del tipo
a sin x + b cos x = c .
(6.19)
Vorremmo ricondurci ad una equazione della forma
A sin(x + ϕ) = c .
Determiniamo quindi A , ϕ tali che
a sin x + b cos x = A sin(x + ϕ) .
Dal fatto che
A sin(x + ϕ) = A(sin x cos ϕ + cos x sin ϕ)
seguono le condizioni
A cos ϕ = a
A sin ϕ = b ,
da cui
tan ϕ =
sin ϕ b
=
cos ϕ a
⇔
92
b
ϕ = arctan .
a
Questo metodo risolutivo può essere utilizzato per individuare le
soluzioni delle equazioni della forma (6.19). L’equazione considerata
nell’ultimo esempio è di questo tipo, con a = b = c = 1 , e possiamo
quindi applicare il metodo appena esposto. Otteniamo:
π
tan ϕ = 1 ⇒ ϕ = ,
4
√
1
A=
=
2,
cos π4
perciò l’equazione iniziale è equivalente a
√
π
=1
2 sin x +
4
ovvero
π
1
sin x +
= √ .
4
2
Quindi si ha
π π
= + 2kπ,
4
4
cioè otteniamo le soluzioni
x+
{x = 2kπ , k ∈ Z}
x+
∪
π 3
= π + 2kπ ,
4
4
π
x = + 2kπ , k ∈ Z .
2
Osservazione 6.14. Osserviamo che il metodo descritto sopra si
basa sul fatto che
a sin x + b cos x = α sin x + β cos x
⇔
(a − α) sin x + (b − β) cos x = 0
(
a=α
⇔
b = β.
∀x ∈ R
Lemma 6.15. Se λ , µ sono tali che
λ sin x + µ cos x = 0
∀x ∈ R
allora λ = µ = 0 .
Dimostrazione. Se scegliamo x =
λ sin
π
π
+ µ cos = 0
2
2
93
π
2
, si ha
⇒
∀x ∈ R
λ = 0,
e prendendo x = 0 , si ottiene
π
π
λ sin + µ cos = 0
2
2
⇒
µ = 0.
Esempio 6.16. Determinare le soluzioni delle equazioni
(1) sin(cos x) = 0 ,
(2) sin(sin x) = 1 .
(1) Se poniamo cos x = t , l’equazione sin t = 0 ha soluzioni
t = kπ , k ∈ Z . Ma Se k , 0 , si avrebbe cos x = kπ e tale
equazioni non ha soluzioni, in quanto |kπ| > 1 mentre il
coseno assume valori in [−1, 1] . Quindi l’unica possibilità è
k = 0 , cioè cos x = 0 , da cui le soluzioni x = π2 + kπ , k ∈ Z .
(2) Si ha sin x = π2 + kπ , ma tale equazione non ammette
soluzioni. Quindi l’equazione iniziale è impossibile.
6.3. Disequazioni trigonometriche
Esempio 6.17. Risolvere la seguente disequazione
2 sin2 x − 5 sin x + 2 < 0 .
Poniamo per semplicità sin x = t ; otteniamo
2t2 − 5t + 2 < 0
e osservando che ∆ = 25 − 16 = 9 , si ottiene
5±3
t1,2 =
4
da cui le soluzioni
1
< t < 2.
2
Quindi
sin x < 2
è vera per ogni x reale, mentre
sin x >
94
1
2
ha per soluzioni
π
5
+ 2kπ < x < π + 2kπ ,
6
6
k∈Z
che sono le soluzioni della disequazione iniziale.
Esempio 6.18. Risolvere la disequazione
p
√
1 − 2 sin2 x ≥ 2 sin x + 1 .
L’insieme di esistenza della disequazione è dato da tutti gli x reali
tali che
1 − 2 sin2 x ≥ 0 .
La disequazione iniziale è equivalente ai due sistemi
(
1 − 2 sin2 x ≥ 0
√
1 − 2 sin2 x ≥ 0
√
∪
2 sin x + 1 ≥ 0
√
2 sin x + 1 < 0
1 − 2 sin2 x ≥ ( 2 sin x + 1)2 .
Per semplificare la notazione poniamo sin x = t , otteniamo:
(
( √
1 − 2t2 ≥ 0
2t + 1 ≥ 0
√
√
∪
2t + 1 < 0
1 − 2t2 ≥ 2t2 + 1 + 2 2t
⇔
⇔
1
1
−√ <t< √
2
2
∪
1
t<−√
2
√
2
2
−
<t<
2 √
2
2
t<−
2
√
∪
1
t≥−√
2
t(2t +
√
2) ≤ 0
√
2
t≥−
√ 2
2
−
≤ t ≤ 0.
2
Il primo sistema non ha soluzioni, il secondo è risolto da
( √
)
2
−
≤t≤0 ,
2
95
da cui
√
sin x ≥ −
2
2
sin x ≤ 0 ,
le cui soluzioni sono
5
π + 2kπ ≤ x ≤ π + 2kπ , k ∈ Z
4
∪
96
7
π + 2kπ ≤ x ≤ 2π + 2kπ , k ∈ Z .
4
CAPITOLO 7
Principio di Induzione e Binomio di Newton
Nel paragrafo 2.1.1 abbiamo incontrato gli assiomi che definiscono i numeri naturali, ed in particolare il quinto assioma, quello
dell’induzione. Nel seguito analizzeremo un po’ più da vicino questo
utile strumento, in una forma leggermente diversa (ma equivalente) a quella vista in precedenza, e lo useremo per dimostrare alcune
interessanti proprietà.
Il principio di induzione (Quinto assioma di Peano). Sia p(n)
un predicato definito su N . Se p(n) è tale che ∃k ∈ N per cui
(1) p(k) è vera ,
(2) ∀n ≥ k, p(n) =⇒ p(n + 1) ,
allora p(n) è vera ∀n ∈ N : n ≥ k.
In particolare, nel caso k = 0, se si prova che p(0) è vera e p(n)
implica sempre p(n + 1), allora p(n) è vera ∀n ∈ N.
Proprietà 7.1. Sia x , 1 . Si ha che
p(n) =: 1 + x + x + ... + x =
2
n
n
X
xi =
i=0
1 − xn+1
∀n ∈ N.
1−x
Dimostrazione. Per dimostrare la proprietà p(n) , utilizziamo il
Principio di induzione. Osserviamo che p(0) e p(1) sono vere, infatti
p(0) :
0
X
xi = x0 = 1 =
i=0
p(1) :
1
X
1 − x1
,
1−x
xi = x0 + x1 = 1 + x =
i=0
97
1 − x2
= 1 + x.
1−x
Facciamo vedere ora che p(n)
supponendo vera p(n) , cioè
⇒
1 + x + x + ... + x =
n
2
n
X
p(n + 1).
xi =
i=0
In altre parole,
1 − xn+1
,
1−x
vogliamo dimostrare che p(n + 1) è vera, ossia
1 + x + x + ... + x + x
2
n
n+1
=
n+1
X
xi =
i=0
1 − xn+2
.
1−x
Ma osserviamo che dall’ipotesi induttiva segue che
1 + x + x2 + ... + xn + xn+1 = (1 + x + x2 + ... + xn ) + xn+1
1 − xn+1
=
+ xn+1
1−x
1 − xn+1 + xn+1 − xn+2
=
1−x
n+2
1−x
,
=
1−x
cioè la tesi.
Proprietà 7.2.
1 + 2 + ... + (n − 1) + n =
n(n + 1)
.
2
Dimostrazione. p(1) è vera, infatti
1·2
.
2
Supponiamo vera p(n) è dimostriamo che anche p(n + 1) è vera, cioè
1=
1 + 2 + ... + (n − 1) + n + (n + 1) =
(n + 1)(n + 2)
.
2
Si ha
1 + 2 + ... + (n − 1) + n + (n + 1) = [1 + 2 + ... + (n − 1) + n] + (n + 1)
n(n + 1)
=
+ (n + 1)
2
n(n + 1) + 2(n + 1)
=
2
(n + 1)(n + 2)
=
.
2
98
Proprietà 7.3 (Disuguaglianza
x ∈ R , x ≥ −1 . Allora
(1 + x)n ≥ 1 + nx,
di
Bernoulli). Sia n ∈ N
e
∀n ≥ 1 .
Dimostrazione. p(1) è vera, infatti
p(1) :
1 + x ≥ 1 + x.
Supponiamo poi vera p(n) e mostriamo che p(n + 1) è vera, cioè
(1 + x)n+1 ≥ 1 + (n + 1)x .
Per ipotesi induttiva, si ha
(1 + x)n+1 = (1 + x)n (1 + x)
≥ (1 + nx)(1 + x)
≥ 1 + nx + x + nx2
≥ 1 + (n + 1)x + nx2
≥ 1 + (n + 1)x
dove nel secondo passaggio abbiamo sfruttato l’ipotesi x ≥ −1 , e
nell’ultimo il fatto che nx2 ≥ 0 . Quindi p(n) è vera, ∀n ≥ 1 e la
proprietà è dimostrata. Osserviamo a margine che la disuguaglianza
di Bernoulli vale anche per n = 0, nel qual caso diventa l’identità 1 = 1
ed occorre ovviamente supporre x , −1 affinché il primo membro
abbia significato.
Definizione 7.4. Un insieme si dice numerabile se può essere messo
in corrispondenza biunivoca con l’insieme N dei numeri naturali.
Esempi 7.5.
• L’insieme Q dei numeri razionali è numerabile;
• l’insieme P dei numeri pari è un insieme numerabile, dato
che la corrispondenza
ϕ : N → P,
ϕ(n) = 2n
è biunivoca. In generale, i sottoinsiemi di N che non sono
finiti sono insiemi numerabili.
99
7.1. Binomio di Newton e somme di potenze.
E’ elementare verificare la seguente formula (quadrato di un
binomio):
(a + b)2 = a2 + 2ab + b2 ;
ed anche la seguente (cubo di un binomio):
(a + b)3 = a3 + 3a2 b + 3ab2 + b3 .
In generale si ha la seguente formula:
Proprietà 7.6. (Binomio di Newton). ∀a, b ∈ R \ {0}, e ∀n ∈ N, si ha
!
n
X
n
(7.1)
(a + b)n =
an−k bk ,
k
k=0
dove
n
k
!
≡
n!
k!(n − k)!
0! ≡ 1 = 1!
è detto coefficiente binomiale.
Dimostrazione. Dimostriamo la formula (7.1) utilizzando il
principio di induzione su n. Vediamo come fare.
Nel caso n = 0 la (7.1) è immediata, perché ricordando il fatto che
0! = 1 si ha che sia il primo che il secondo membro della (7.1) sono
pari ad 1.
Supponiamo quindi che la (7.1) sia vera per un certo n e proviamo
che
!
n+1
X
n + 1 n+1−k k
n+1
(7.2)
(a + b) =
a
b.
k
k=0
Sfruttando la (7.1) si ha
(7.3) (a + b)n+1
n
!
X n
= (a + b)n (a + b) =
an−k bk (a + b)
k
k=0
!
!
n
n
X
n n−k+1 k X n n−k k+1
=
a
b +
a b .
k
k
k=0
100
k=0
A questo punto, osserviamo che
!
!
n
n
X
n n−k+1 k
n n+1 X
a
b =
a +
(7.4)
k
0
k=1
k=0
!
!
n−1
n n+1 X n
an−(h+1)+1 bh+1 =
a +
=
h+1
0
h=0
!
n n−k+1 k
a
b
k
!
!
n−1
n n+1 X n
an−h bh+1 ,
a +
h+1
0
h=0
mentre
!
!
!
n−1
n
X
n n−k k+1 X n n−k k+1
n n+1
a b =
a b +
b .
k
k
n
(7.5)
k=0
k=0
Quindi, usando (7.4) e (7.5) in (7.3) si ha
(a + b)
n+1
!
!
!#
!
n−1 "
n n+1 X
n
n
n n+1
n−k k+1
=
a +
+
a b +
b
0
k+1
k
n
k=0
!
!
!
n−1
n n+1 X n + 1 n−k k+1
n n+1
=
a +
a b +
b
0
k+1
n
k=0
!
!
!
n
n + 1 n+1 X n + 1 n−h+1 h
n + 1 n+1
=
a +
a
b +
b
0
h
n+1
h=1
!
n+1
X
n + 1 n+1−h h
=
a
b,
h
h=0
cioè la (7.2). La formula (7.1) risulta dunque dimostrata.
Con n = 3 si ottiene la formula per calcolare il cubo di un binomio.
Infatti
(a + b)
3
!
3
X
3
=
ak bn−3
k
k=0
!
!
3
3
0 3
=
a b +
a b2 +
0
1
101
3
2
!
a b+
2
3
3
!
a b3
e dalla definizione di coefficiente binomiale si ha
!
!
3
3
3!
3!
=
=
=1
=3
0! 1!
1! 2!
0
1
!
!
3
3
3!
3!
=
=
=3
= 1.
2! 1!
3! 0!
2
0
Naturalmente se n = 2 si ottiene la formula del quadrato del binomio.
Esercizio 7.7. Determiniamo
n
X
k2 .
k=1
Svolgimento:
n
n
X
X
3
(k + 1) =
(k3 + 3k2 + 3k + 1)
k=0
k=0
=
(7.6)
n
X
k3 + 3
k=0
n
X
k=0
n
X
k + (n + 1)
k2 + 3
k=0
ma si ha anche
n
n+1
n+1
X
X
X
3
3
(k + 1) =
h =
k3 .
k=0
h=1
k=1
Quindi, eguagliando la (7.6) con la (7.6) e ricordando che abbiamo
precedentemente dimostrato che
n
X
k=0
k=
n(n + 1)
,
2
si ottiene
n
n+1
X
X
k3 + 3
k2 + 3
k + (n + 1) =
k3
k=0
k=0
k=0
k=1
n
n
n
n
X
X
X
X
k3 + 3
k2 + 3
k + (n + 1) =
k3 + (n + 1)3 ,
n
X
n
X
k=0
k=0
da cui
3
n
X
k=0
k=0
k2 + 3
k=1
n(n + 1)
+ (n + 1) = (n + 1)3 ,
2
102
e quindi
n
X
k=0
"
#
3n(n
+
1)
1
(n + 1)3 −
k2 =
− (n + 1) .
3
2
Pertanto
n
X
k=0
k
2
n+1
3
2
=
(n + 1) − n − 1
3
2
n+1
[2(n + 1)2 − 3n − 2]
6
n+1 2
=
(2n + 4n + 2 − 3n − 2)
6
n+1 2
(2n + 1)
=
6
n(n + 1)(2n + 1)
=
.
6
=
7.1.1. Il triangolo di Tartaglia per il calcolo dei coefficienti binomiali. Il triangolo di Tartaglia (o di Pascal) è un modo semplice
per calcolare induttivamente i coefficienti binomiali dello sviluppo
di una potenza di un binomio. Si costruisce con le seguenti regole:
l’n–ma riga (n ≥ 0) ha n + 1 elementi disposti in modo tale che il
primo e l’ultimo sono uguali ad 1; ogni riga va centrata sotto la precedente; infine, nei posti dal secondo al penultimo di ciascuna riga,
il valore da inserire è dato dalla somma dei due valori che si trovano
immediatamente in alto a sinistra e in alto a destra.
Nella figura seguente è rappresentato il triangolo fino alla sesta
riga (n = 5):
n=0
n=1
n=2
n=3
n=4
n=5
1
1
1
1
1
1
1
2
3
4
5
1
3
6
10
1
4
10
1
5
1
Esempio 7.8. Struttando il triangolo di Tartaglia possiamo immediatamente calcolare, ad esempio, la quinta potenza di un binomio.
103
Osservando che i valori presenti sulla riga corrispondente a n = 5
sono, in ordine, 1, 5, 10, 10, 5, 1, si ha:
(a + b)5 = a5 + 5a4 b + 10a3 b2 + 10a2 b3 + 5ab4 + b5 .
104
CAPITOLO 8
Brevi richiami di geometria analitica ed euclidea
• Equazione di una retta generica:
y = mx + q
• Equazione di una retta passante per due punti di coordinate
(x1 , y1 ) e (x2 , y2 ):
(y − y2 )(x1 − x2 ) = (x − x2 )(y1 − y2 ) .
In particolare, segue che
y = cost
se y1 = y2 , x1 , x2 ,
x = cost
se x1 = x2 , y1 , y2 .
• Equazione della circonferenza di raggio 1 centrata
nell’origine:
x2 + y2 = 1 .
La generica equazione di una circonferenza di centro
C = (α, β) e raggio r:
(x − α)2 + (y − β)2 = r2 .
• Equazione di una parabola in posizione generica:
y = ax2 + bx + c ,
• Distanza tra due punti:
q
P = (x1 , y1 ), Q = (x2 , y2 ) ⇒ PQ = (x2 − x1 )2 + (y2 − y1 )2 .
La formula della distanza tra due punti si ottiene dal
Teorema 8.1 (Teorema di Pitagora). In ogni triangolo rettangolo il
quadrato dell’ipotenusa è equivalente alla somma dei quadrati dei due cateti.
105
Dimostrazione. Dimostrazione algebrico-geometrica del Teorema di Pitagora (di J.Garfield):
Figura 8.1.
L’area del trapezio in figura si calcola in due modi diversi
ottenendo:
(b − a)(b + a) c2
= + ab ,
a(a + b) +
2
2
da cui semplificando di ottiene a2 + b2 = c2 .
Teorema 8.2 (Primo Teorema di Euclide). In ogni triangolo rettangolo il quadrato costruito su un cateto è equivalente al rettangolo che ha per
dimensioni l’ipotenusa e la proiezione del cateto sull’ipotenusa.
Figura 8.2.
a2 = (c + d) · c = c2 + dc .
106
Teorema 8.3 (Secondo Teorema di Euclide). In ogni triangolo rettangolo il quadrato costruito sull’altezza relativa all’ipotenusa è equivalente
al rettangolo che ha per dimensioni le proiezioni dei cateti sull’ipotenusa.
h2 = cd .
Dimostrazione. (Del secondo teorema di Euclide) Per il Teorema di
Pitagora si ha che
(c + d)2 = a2 + b2
h2 = a2 − c2 = b2 − d2 .
Quindi segue che
2cd = a2 − c2 + b2 − d2 = h2 + h2
⇒
cd = h2 .
Dimostrazione. (Del primo teorema di Euclide) Per il secondo
teorema di Euclide si ha che
h2 = cd,
mentre dal Teorema di Pitagora si ha
a2 = c2 + h2
da cui la tesi.
107
CAPITOLO 9
I numeri complessi
In quest’ultimo capitolo viene fornita una breve introduzione sull’insieme C dei numeri complessi. Prima di tutto diamo una idea di
come sono ”nati”, a partire dalla soluzione delle equazioni di terzo
grado (a coefficienti reali). La trattazione dei numeri complessi inizia poi con la definizione formale di numero complesso, vengono poi
definite le operazioni in C , e presentate le diverse rappresentazioni
dei numeri complessi.
Motivazioni
Consideriamo l’equazione di terzo grado
y3 + ay2 + by + c = 0, a, b, c ∈ R,
con lo scopo di individuare un metodi per scrivere le radici in
funzione dei coefficienti a, b, c.
Se sostituiamo nella equazione una nuova incognita x tale che
a
y=x− ,
3
con un conto non complicato si ottiene una equazione in x priva del
termine di secondo grado
(9.1)
x3 + px + q = 0, p, q ∈ R,
sulla quale concentreremo i nostri sforzi.
considereremo anche il caso concreto
(9.2)
Nel fare questo
x3 − 19x + 30 = 0.
che ha tre soluzioni reali: 2, 3, −5.
Come vedremo nel corso di Analisi 1, l’equazione (9.1) ha almeno
una soluzione reale x0 . Introduciamo allora una incognita ausiliaria
108
u radice dell’equazione
p
=0
3
Supponiamo di essere nella situazione in cui il discriminante della
equazione (9.3) è strettamente positivo. Allora (9.3) ha due radici
p
reali α e β. Come sappiamo la loro somma e’ x0 e il loro prodotto − 3 .
Poiché x0 = α + β e’ una radice di (9.1) si ottiene:
u2 − x0 u −
(9.3)
(α + β)3 + p(α + β) + q = 0.
Sviluppando il cubo e ricordando che 3αβ + p = 0 si ottiene
α3 + β3 = −q
p
D’altra parte αβ = − 3 per cui abbiamo anche
α3 β3 = −
p3
27
Questa ultime due uguaglianze mostrano che α3 e β3 sono le radici
dell’equazione di secondo grado
p3
=0
27
a cui ci si riconduce per poter individuare le radici α+β. La cosa pero’
che sconvolse i matematici che studiavano questo problema e che in
casi come il nostro in cui abbiamo tre radici reali, il discriminante delle
equazione (9.4) può’ essere negativo (da qui l’esigenza di considerare
in qualche modo radici quadrate di numeri negativi). Si noti che nel
nostro caso il discriminante e’ dato da
4
4
q2 + p3 = (30)2 + (−19)3 < 0.
27
27
(9.4)
z2 + qz −
9.1. Definizione dei numeri complessi
L’insieme dei numeri complessi viene solitamente indicato con la
lettera C . Un numero complesso z viene definito nel seguente modo.
Definizione 9.1. Un numero complesso z è una coppia ordinata di
numeri reali (a, b) , con a e b dette rispettivamente parte reale (Re z) e
parte immaginaria (Im z) di z .
109
Esempio 9.2. Ad esempio z1 = (a1 , b1 ) e z2 = (a2 , b2 ) rappresentati
in figura sono numeri complessi.
Figura 9.1.
Possiamo definire somma e prodotto di due numeri complessi
z1 = (a, b) e z2 = (c, d).
Somma:
def
z1 + z2 = ((a + c), (b + d)) .
Il numero complesso 0 = (0, 0) è l’elemento neutro rispetto alla
somma. L’opposto del numero complesso z = (a, b) è −z = (−a, −b) .
Prodotto:
(a, b) · (c, d) = (ac − bd, ad + bc) .
L’elemento neutro rispetto al prodotto è il numero immaginario (1, 0) ,
essendo
(a, b) · (1, 0) = (a − 0, 0 + b) = (a, b) .
9.2. Rappresentazione algebrica dei numeri complessi
Un numero complesso z = (a, b) può essere rappresentato in forma
algebrica, cioè può essere scritto come
z = a + ib ,
con
a = Re z ,
b = Im z .
110
i è detto unità immaginaria 1, è un numero complesso individuato da
i = (0, 1) ,
ed è tale che i · i = i2 = −1 . Tenendo presente questa proprietà, pos-
Figura 9.2.
siamo definire somma e prodotto di due numeri complessi z1 = (a, b)
e z2 = (c, d) utilizzando la rappresentazione algebrica. Le definizioni
di somma e prodotto sono ”obbligate” se cogliamo che C munito di
tali operazioni sia un campo.
Somma:
z1 = a1 + ib1
z2 = a2 + ib2
z1 + z2 = a1 + ib1 + a2 + ib2 = a1 + a2 + ib1 + ib2
= a1 + a2 + i(b1 + b2 )
(cioè nella somma di due numeri complessi si sommano tra loro
rispettivamente le parti reali e le parti immaginarie).
1
Supponiamo di voler trovare x tale che
x2 = −1 .
Se x0 è soluzione, anche −x0 lo è. Queste due soluzioni vengono indicate con i e
−i , e i è detto unità immaginaria.
111
Prodotto:
z1 · z2 = (a1 + ib1 )(a2 + ib2 )
= a1 (a2 + ib2 ) + ib1 (a2 + ib2 )
= a1 a2 + a1 ib2 + ib1 a2 + ib1 ib2
= a1 a2 + ia1 b2 + ib1 a2 + i2 b1 b2
= a1 a2 + ia1 b2 + ib1 a2 − b1 b2
⇒
(a1 , b1 )(a2 , b2 ) = (a1 a2 − b1 b2 , a1 b2 + b1 a2 ) .
L’elemento neutro rispetto alla somma è 0 + i0 . Inoltre, se z = a + ib ,
il suo opposto è −z = −a − ib .
L’elemento neutro rispetto alla moltiplicazione è 1 = 1 + i · 0 .
Esiste il reciproco: infatti, supponiamo che z , 0 (lo 0 è l’elemento
neutro rispetto alla somma) e dimostriamo che esiste un unico y tale
che z · y = 1. Si ha
(9.5) y =
α − iβ
α − iβ
−β
1
1
α
1
=
=
·
= 2
=
+
i
z α + iβ α + iβ α − iβ α + β2 α2 + β2
α2 + β2
essendo (α + iβ)(α − iβ) = α2 − i2 β = α2 + β2 > 0 .
Verifichiamo che effettivamente la y determinata è il reciproco di
z:
(α + iβ) ·
α − iβ
1
1
= 2
(α + iβ)(α − iβ) = 2
· (α2 + β2 ) = 1 .
2
2
2
2
α +β
α +β
α +β
Dimostriamo ora che il reciproco è unico: per assurdo siano y1 , y2
tali che y1 ·z = 1 e y2 ·z = 1 . Tra tutti i possibili reciproci di z scegliamo
z−1 ∈ C definito da (9.5) (abbiamo che z−1 · z = 1). Segue che:
y1 · z−1 · z = z−1
y2 · z−1 · z = z−1
)
⇒
y1 = y2 = z−1 .
Osservazione 9.3. Grazie all’esistenza del reciproco si vede come
è possibile effettuare la divisione in C. Siano z1 = α1 +iβ1 , z2 = α2 +iβ2 .
112
Allora
1
α2 − ib2
z1 α1 + iβ1
=
= (α1 + iβ1 ) ·
= (α1 + iβ1 ) · 2
.
z2 α2 + iβ2
α2 + iβ2
α2 + β22
Adesso diamo una diversa dimostrazione di esistenza e unicità
per il reciproco.
z = α + iβ , 0
( ossia α2 + β2 > 0) ,
y = a + ib ,
con a e b da determinare in modo che (α + iβ)(a + ib) = 1 = 1 + i · 0 ,
Essendo
(α + iβ)(a + ib) = αa + iαb + iaβ − βb ,
si hanno le condizioni
αa − βb = 1
αb + aβ = 0
(
Risolviamo il sistema supponendo β , 0 . Dalla seconda equazione
si ottiene
−αb
a=
β
e sostituendo nella prima, segue
!
−αb
α
− βb = 1
β
−α2 b β2 b
−
=1
β
β
α2 b + β2 b = −β
da cui
b=
e
−β
α2 + β2
!
−β
−αb −α
α
a=
=
= 2
.
2
2
β
β α +β
α + β2
Quindi, se β , 0 si ha
y=
α2
β
α
−i 2
.
2
+β
α + β2
113
Se invece β = 0 , α , 0 , si ha il sistema
(
αa = 1
αb = 0
che ha come soluzione
b = 0,
a=
1
,
α
cioè
y=
1
+ i · 0.
α
Definizione 9.4. Il coniugato di z è il numero che si ottiene da z
cambiando di segno la parte immaginaria.
Dato z = α + iβ , il suo coniugato, denotato con z , è
z = α − iβ .
Definizione 9.5. Il modulo di z , indicato con |z| , è dato da
q
|z| = α2 + β2 .
Di conseguenza:
1
z
= 2,
z |z|
zz = |z|2 ,
z + z = 2Rez
z − z = i · 2Rez .
Esercizio 9.6. Dimostrare le seguenti proprietà.
(1) z1 + z2 = z1 + z2 ;
(2) z1 · z2 = z1 · z2 ;
1
1
(3)
= .
z
z
Svolgimento:
(1) Siano z1 = a1 + ib1 e z2 = a2 + ib2 , con a1 , a2 , b1 , b2 ∈ R . Si ha
z1 + z2 = a1 + a2 + i(b1 + b2 ) ,
114
quindi
z1 + z2 = a1 + a2 − i(b1 + b2 )
= a1 + a2 − ib1 − ib2
= a1 − ib1 + a2 − ib2
= z1 + z2 .
(2) Siano z1 , z2 come nel punto precedente. Abbiamo
z1 · z2 = (a1 + ib1 )(a2 + ib2 )
= a1 a2 + ia1 b2 + ib1 a2 − b1 b2
= a1 a2 − b1 b2 + i(a1 b2 + b1 a2 )
quindi
z1 · z2 = a1 a2 − b1 b2 − i(a1 b2 + b1 a2 )
= a1 a2 − b1 b2 − ia1 b2 − ib1 a2 =
= (a1 − ib1 )(a2 − ib2 ) = z1 · z2 .
(3) Sia z = a + ib , a, b ∈ R . Allora
!
a
1
b
= 2
+i 2
2
z
a +b
a + b2
a + ib
a + ib
= 2
=
2
a +b
(a + ib)(a − ib)
1
1
=
= .
a − ib z
Esercizio 9.7. Verifichiamo che in C vale la proprietà distributiva
del prodotto rispetto alla somma, cioè ∀z1 , z2 , z3 si ha
(z1 + z2 ) · z3 = z1 · z3 + z2 · z3 .
Svolgimento: siano
z1 = a1 + ib1
z2 = a2 + ib2
z3 = a3 + ib3 .
115
Sia ha
(z1 + z2 ) · z3 = [a1 + a2 + i(b1 + b2 )] · (a3 + ib3 )
= (a1 + a2 )a3 − (b1 + b2 )b3 + i[(a1 + a2 )b3 + (b1 + b2 )a3 ]
= a1 a3 + a2 a3 − b1 b3 − b2 b3 + ia1 b3 + ia2 b3 + ib1 a3 + ib2 a3
= a1 a3 − b1 b3 + i(a1 b3 + b1 a3 ) + a2 a3 − b2 b3 + i(a2 b£ + b2 a3 )
= (a1 + ib1 )(a3 + ib3 ) + (a2 + ib2 )(a3 + ib3 ) .
Proprietà del modulo. Sia z = α + iβ . Il modulo di z , cioè
p
|z| = α2 + β2 , gode delle seguenti proprietà:
a) |z| ≥ 0 , |z| = 0 ⇔ z = 0 ;
b) |z| = |z| ;
c) i) |Re z| ≤ |z|
ii) |Im z| ≤ |z|
iii) |z| ≤ |Re z| + |Im z| ;
d) (disuguaglianza triangolare) |z1 + z2 | ≤ |z1 | + |z2 | .
Dimostriamo le proprietà sopra elencate.
a) Questa proprietà segue direttamente dalla definizione di
modulo.
√
b) Sia z = a + ib e z = a − ib il suo coniugato. Si ha |z| = a2 + b2
p
e |z| = a2 + (−b)2 , da cui la tesi.
c) Sia z = a + ib .
√
a2 + b2
⇔
a2 ≤ a2 + b2
i) |Re z| = |a| ≤
che è sempre vera;
ii) la dimostrazione è analoga al punto precedente;
iii) √
dimostrare |z| ≤ |Re z| + |Im z| equivale a dimostrare che
a2 + b2 ≤ |a| + |b| , a sua volta equivalente a
a2 + b2 ≤ (|a| + |b|)2
= |a|2 + |b|2 + 2|a||b|
= a2 + b2 + 2|a||b|
che vale perchè 2|a||b| ≥ 0.
d) Siano z1 = a + ib , z2 √= c + id .√Dobbiamo dimostrare che
p
(a + c)2 + (b + d)2 ≤ a2 + b2 + c2 + d2 ma ciò è equivalente
116
a
√
√
(a + c)2 + (b + d)2 ≤ a2 + b2 + c2 + d2 + 2 a2 + b2 c2 + d2
√
√
a2 + c2 + 2ac + b2 + d2 + 2bd ≤ a2 + b2 + c2 + d2 + 2 a2 + b2 c2 + d2
√
√
ac + bd ≤ a2 + b2 c2 + d2
p
ac + bd ≤ (a2 + b2 )(c2 + d2 ) .
⇒
⇔
⇔
Ma abbiamo
ac + bd ≤ |ac + bd| ≤ |ac| + |bd| = |a||c| + |b||d|
∀a, b, c, d ∈ R .
Quindi per concludere la dimostrazione è sufficiente
dimostrare che
p
|a||c| + |b||d| ≤ (a2 + b2 )(c2 + d2 ) .
Grazie alla presenza dei moduli, si può dimostrare la proprietà solamente per a, b, c, d ≥ 0 . Quindi basta provare
che
(ac + bd)2 ≤ (a2 + b2 )(c2 + d2 )
⇔
a2 c2 + b2 d2 + 2abcd ≤ a2 c2 + b2 c2 + a2 d2 + b2 d2
⇔
b2 c2 + a2 d2 − 2abcd ≥ 0
⇔
(bc + ad)2 ≥ 0
che è sempre vera. La tesi è quindi dimostrata.
Esercizio 9.8. Trovare tutti i numeri complessi z = a + ib che
soddisfano l’equazione
z2 + i Im z + 2z = 0 .
(9.6)
Svolgimento: z = a + ib verifica l’equazione (9.6) se e solo se
(a + ib)(a + ib) + ib + 2(a − ib) = 0
⇔
a2 − b2 + 2iab + ib + 2a − 2ib = 0
⇔
a2 − b2 + 2a + i(2ab + b) = 0
( 2
a − b2 + 2a = 0
2ab + b = 0
⇔
117
La seconda equazione ha le due soluzioni
b=0
2a + 1 = 0 .
∨
• Se b = 0 , dalla prima equazione segue a = 0
quindi si ottengono i numeri complessi
z=0+i·0
∨
a = −2
z = −2 + i · 0 .
∨
1
• Se a = − , allora dalla prima equazione si ha
2
1
3
− b2 − 1 = 0 ⇒ b2 = −
4
4
che non ha soluzioni
9.3. Forma trigonometrica (o polare) dei numeri complessi
Un numero complesso z = (a, b) può essere rappresentato
utilizzando le coordinate polari (ρ, ϑ) nel seguente modo:
z = ρ(cos ϑ + i sin ϑ)
dove ρ è il modulo di z dato da
√
ρ = |z| =
a2 + b2
e ϑ è l´argomento di z , che si ottiene dalle relazioni
b = ρ sin ϑ
a = ρ cos ϑ
ovvero
b
= tan ϑ .
a
i
h
La funzione tan : − π2 , π2 → R è biunivoca (come vedremo
nel corso di Analisi Matematica 1) e la sua inversa è la funzione
arcotangente che indicheremo con arctan.
Sia z , 0 . Allora z può essere scritto utlizzando le coordinate
polari nel seguente modo
z = ρ(cos ϑ + i sin ϑ)
118
Figura 9.3.
dove
√
ρ=
a2 + b2 ,
cos ϑ = √
a
a2 + b2
,
sin ϑ = √
b
a2 + b2
.
Esercizio 9.9. Scrivere il numero complesso
√
z= 3+i
in forma trigonometrica.
Svolgimento:
r
√ 2
ρ=
3 + 12 = 2 ,
Quindi:
1
π
tan ϑ = √
⇒ ϑ = ,.
6
3
π
π
z = 2 cos + i sin
.
6
6
Il prodotto di due numeri complessi z1 , z2 scritti in forma
trigonometrica, cioé
z1 = ρ1 (cos ϑ1 + i sin ϑ1 )
z2 = ρ2 (cos ϑ2 + i sin ϑ2 ) ,
viene calcolato come segue:
z1 · z2 = ρ1 ρ2 (cos ϑ1 + i sin ϑ1 )(cos ϑ2 + i sin ϑ2 )
= ρ1 ρ2 (cos ϑ1 cos ϑ2 − sin ϑ1 sin ϑ2
+i(sin ϑ1 cos ϑ2 + cos ϑ1 sin ϑ2 ))
= ρ1 ρ2 (cos(ϑ1 + ϑ2 ) + i sin(ϑ1 + ϑ2 )) .
119
Se z1 = z2 = z = ρ(cos ϑ + i sin ϑ) , allora
z2 = ρ2 (cos 2ϑ + i sin 2ϑ) .
Figura 9.4.
Siano ρ1 = ρ2 = 1 . Osserviamo che
π
π
i = cos + i sin
2
2
e
i · i = i2 = −1 .
Dunque ruotando i di un angolo di
π
2
si arriva in (−1, 0)) .
9.3.1. Formula di De Moivre.
zn = ρn (cos nϑ + i sin nϑ) .
Dimostriamo la proprietà usando il principio di induzione. Osserviamo che p(2) è vera. Quindi facciamo vedere che p(n) ⇒ p(n+1),
cioè
zn = ρn (cos 0ϑ+i sin nϑ)
⇒
zn+1 = ρn+1 (cos(n+1)ϑ+i sin(n+1)ϑ) .
Per ipotesi induttiva si ha
zn+1 = z · zn = ρn (cos nϑ + i sin nϑ)ρ(cos ϑ + i sin ϑ) .
Resta da dimostrare che
(cos nϑ + i sin nϑ)(cos ϑ + i sin ϑ) = cos(n + 1)ϑ + i sin(n + 1)ϑ .
120
Ma poiché il prodotto si ottiene sommando gli angoli, si ottiene come
angolo
ϑ + nϑ = (n + 1)ϑ
e la dimostrazione è conclusa.
9.3.2. Radice n-esima dell’unità. Sia
z = ρ(cos ϑ + i sin ϑ) .
Allora
zn = 1
se e solo se
cos nϑ + i sin nϑ = 1
⇔
ρ=1e
cos nϑ + i sin nϑ = 1 .
Dunque abbiamo
(
⇔
e da ciò segue nϑ = 2kπ ,
cos nϑ = 1
sin nϑ = 0 ,
k ∈ Z . Quindi
ϑ=
2kπ
.
n
Se
k = 0,
ϑ=0
2π
ϑ=
n
4π
ϑ=
n
se
k = 1,
se
k = 2,
se
k = n − 1,
se
k = n,
ϑ=
ϑ = 2π
2(n − 1)π
n
cioè per k = n abbiamo fatto un giro completo. Quindi tutte le
soluzioni dell’equazione zn = 1 sono
(
)
2kπ
2kπ
cos
+ i sin
, k = 0, ..., n − 1 .
n
n
Consideriamo ora un’equazione del tipo
zn = ω
121
con
ω = r(cos ϕ + i sin ϕ) ,
ϕ ∈ [0, 2π[ .
Quindi, se esprimiamo z come z = r(cos ϑ + i sin ϑ) , l’equazione
diventa
ρn (cos nϑ + i sin nϑ) = r( cos ϕ + i sin ϕ) ,
da cui
ρn = r
⇒
nϑ = ϕ + 2kπ
ρ=
√
n
r
⇒
ϑ=
ϕ 2kπ
+
.
n
n
Quindi le soluzioni sono
( "
!
!#
)
√
ϕ 2kπ
ϕ 2kπ
n
r cos
+
+ i sin
+
: k = 0, ..., n − 1 .
n
n
n
n
Esercizio 9.10. Risolviamo l’equazione
z5 = 1 + i .
L’equazione è della forma vista sopra con n = 5 e ω = 1+i . Scriviamo
ω in forma trigonometrica. Si ha che
√
|ω| = 2 ,
quindi
√ π
π
2 cos + i sin
.
4
4
Pertanto le soluzioni dell’equazione sono
!
!
)
(
√
π 2kπ
π 2kπ
10
+
+ i sin
+
: k = 0, 1, 2, 3, 4 .
2 cos
20
5
20
5
ω=
122
")