1.2 – Teoria classica della gravitazione
Le Leggi di Keplero – Nel modello del Mondo basato sul sistema eliocentrico, i
pianeti, Terra compresa, descrivono delle orbite intorno al Sole supposto immobile al
centro del sistema. Le tre leggi di Keplero definiscono matematicamente queste orbite:
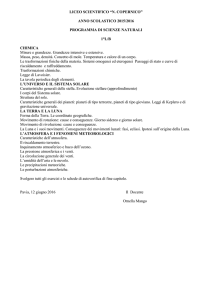
1° Legge (Legge delle orbite): I pianeti si muovono intorno al Sole descrivendo
una ellisse di cui il Sole occupa uno dei fuochi
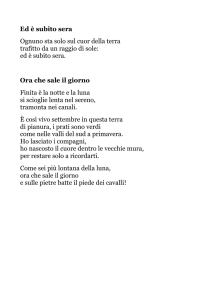
Fig.1.2.1 – L’orbita di un pianeta è una ellisse.
Il Sole si trova in uno dei fuochi.
La figura 1.1.1), rappresenta l’orbita di un pianeta disegnata molto eccentrica per
motivi didattici. In effetti le orbite della maggior parte dei pianeti sono molto vicine ad
una circonferenza, al punto che la reale rappresentazione dell’orbita della Terra sarebbe
indistinguibile da una circonferenza. Infatti l'eccentricità e = 0.017. Solo Mercurio e
Plutone fra i pianeti del Sistema Solare presentano una eccentricità elevata con e = 0.2
ed e = 0.25 rispettivamente.
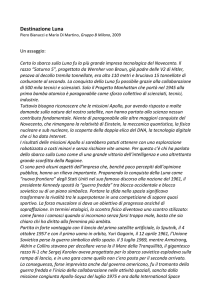
2° Legge (Legge delle aree) - Il segmento che congiunge il pianeta ed il Sole
(raggio vettore), descrive aree uguali in tempi uguali
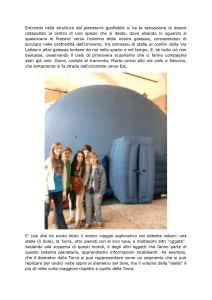
Fig.1.2.2) – Le aree S spazzate dal raggio vettore
in tempi uguali, sono uguali.
Il significato fisico di questa legge appare evidente dalla figura 1.2.2). Per poter
spazzare aree uguali in tempi uguali, il pianeta in transito nella parte dell’orbita più
vicina al Sole, dovrà percorrere quel tratto con una velocità maggiore rispetto a quando
transiterà nel tratto in cui è più distante dal Sole.
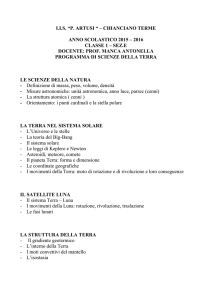
3° Legge (Legge dei periodi) – I quadrati dei tempi impiegati a percorrere le
orbite sono proporzionali ai cubi dei rispettivi semiassi maggiori.
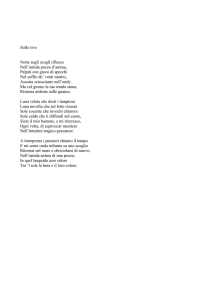
Fig.1.2.3) – La Legge dei periodi. La costante K
della legge dipende dal corpo centrale
e quindi se applicata ai pianeti,
dipende dal Sole. R è il semiasse
dell’orbita del pianeta in esame e T il
suo periodo di rivoluzione intorno al
Sole.
La Legge di Newton – Partendo dai risultati di Keplero e di Galileo, Newton
arrivò con geniali intuizioni alla legge della gravitazione universale. Nello suo studio
del moto della Luna, egli partì dall’ipotesi che la Luna ruotava intorno alla Terra
descrivendo un’orbita ellittica in accordo con le leggi di Keplero, così come la Terra
ruotava intorno al Sole seguendo le stesse leggi. Queste saranno anche in questa sede le
ipotesi di partenza per le dimostrazioni che seguono.
E’ acquisito, che ogni corpo in moto circolare è soggetto ad una forza che lo
devia, attraendolo continuamente verso il centro della sua traiettoria, in assenza della
quale, per il 1° Principio della dinamica già stabilito da Galileo, il corpo stesso
proseguirebbe indefinitamente con velocità costante lungo una linea retta.
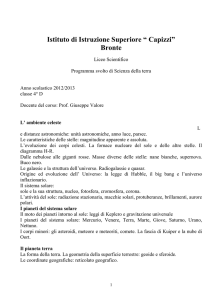
Poiché quindi la Luna descrive intorno alla Terra un’orbita ellittica, dobbiamo
ipotizzare l’esistenza di una forza attrattiva che costantemente la attrae verso la Terra,
senza la quale essa si allontanerebbe indefinitamente: fig.1.2.4).
Per definire matematicamente questa forza, analizziamo l’accelerazione centripeta
a cui è soggetta la Luna.
Nella ipotesi di orbita circolare, che è accettabile in quanto l’eccentricità
dell’orbita è piccola ed il conseguente errore che si commette è modesto,
l’accelerazione centripeta è espressa dalla:
aL =
v L2
rTL
1.2.1)
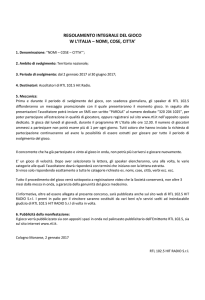
Fig.1.2.4) – La Luna percorre un’orbita intorno alla
Terra in quanto esiste una forza
centripeta (in blu). Se la forza non
esistesse la Luna dovrebbe allontanarsi
indefinitamente con un moto rettilineo ed
uniforme (in rosso).
dove rTL è il raggio dell’orbita lunare, cioè la distanza Terra-Luna e vL la velocità lineare
della Luna lungo la sua orbita. Sempre nell’ipotesi fatta, questa velocità sarà costante e
quindi possiamo utilizzare la relazione valida per i moti circolari uniformi:
vL =
2π ⋅ rTL
TL
1.2.2)
avendo chiamato TL il periodo di rivoluzione della Luna intorno alla Terra. La 1.2.2)
sostituita nella 1.2.1) dà:
2
4π 2 ⋅ rTL
aL =
TL2
rTL
=>
aL =
4π 2 ⋅ rTL
TL2
1.2.3)
Considerando che per il moto della Luna intorno alla Terra vale la 3° Legge di
3 , pertanto sostituendo
Keplero, il periodo può essere espresso attraverso la: TL2 =kT ⋅rTL
questa espressione nella 1.2.3) si ottiene:
4π 2 ⋅ rTL 2
4π 2 1
⋅ 2
1.2.4)
3
2
kT rTL
kT ⋅ rTL
kT ⋅ rTL
L’accelerazione centripeta quindi risulta inversamente proporzionale all’inverso
del quadrato della distanza fra i due corpi e questo è un risultato fondamentale che
ritroveremo in altre occasioni.
La costante di proporzionalità kT al denominatore della 1.2.4) dipende, in accordo
con la 3° Legge di Keplero, dalla Terra che è il corpo centrale del sistema. La forza FL
che mantiene la Luna nella sua orbita e l'accelerazione aL che ne deriva, debbono essere
in relazione con la massa mL della stessa Luna in accordo con il 2° Principio della
dinamica:
aL =
=> aL =
4π 2
FL = mL ⋅ a L = mL ⋅
k
T
4π 2
1
2
r TL
=> a L =
1.2.5)
L'espressione 1.2.5) quindi è proprio l’espressione della forza attrattiva esercitata
dalla Terra che costringe la Luna a descrivere la sua orbita.
Ma questa è una prerogativa della sola Terra in quanto corpo speciale
dell’Universo, oppure ogni corpo dotato di massa è in grado di esercitare lo stesso tipo
di forza?
Per rispondere a questa domanda consideriamo il sistema Sole-Terra, nel quale è
la Terra a girare intorno al Sole.
Ripetendo il ragionamento che ha portato alle relazioni scritte per il sistema TerraLuna, sostituendo i parametri con quelli del nuovo sistema, per la forza esercitata dal
Sole che vincola la Terra nella sua orbita si ottiene una espressione analoga alla 1.2.5).
Questa nuova forza è però esercitata da un altro corpo: il Sole. Ciò vuol dire che:
● ogni corpo dotato di massa, esercita questo tipo di forza su un’altra massa.
Quindi tornando al sistema Terra-Luna, anche la Luna dovrà esercitare sulla Terra
una forza del tipo descritto dalla 1.2.5). La conclusione è che la forza esercitata dalla
Luna sulla Terra deve essere esprimibile dalla relazione:
4π 2
FT = M T ⋅ aT = M T
k
L
1
2
r TL
1.2.6)
dove la costante kL deve dipendere dalla Luna che è causa della forza.
Se nelle 1.2.5) e 1.2.6) al posto dei fattori 4π2/kL e 4π2/kT introduciamo due nuove
costanti secondo le relazioni:
4π 2
= G mL
kL
1.2.7)a
4π 2
= G MT
kT
1.2.7)b
nelle quali, le costanti kL e kT si legano alle masse mL ed MT della Luna e della Terra
rispettivamente, attraverso il fattore G che è una nuova costante avente lo stesso valore
per entrambe le forze.
Utilizzando questa notazione, le due forze agenti nel sistema Terra-Luna
diventano:
FTL = G ⋅
FLT = G ⋅
M T ⋅ mL
2
r TL
M T ⋅ mL
2
r TL
1.2.8)a
1.2.8)b
Le 1.2.8) sono identiche, come deve essere per il 3° Principio della dinamica in un
sistema isolato: fig.1.2.5).
Fig.1.2.5) – Nel sistema Terra-Luna considerato
in prima approssimazione isolato,
vale il 3° Principio della dinamica.
L’ipotesi fatta, che ogni corpo dotato di massa, esercita su altre masse una forza
attrattiva del tipo espresso dalle 1.2.8), porta alla conclusione che anche la forza con la
quale tutti i corpi sulla superficie della Terra vengono attratti verso il centro, la forza
peso, sia della stessa natura. In accordo con questa ipotesi, la forza peso deve avere una
espressione simile alla 1.2.5):
4π 2 1
F = m ⋅
⋅
kT r 2
T
1.2.9)
dove m è la massa del corpo che sulla superficie terrestre subisce l'attrazione
gravitazionale, rT è la distanza fra il corpo m posto sulla superficie ed il centro della
Terra: cioè il raggio della Terra.
Ma è noto che la forza peso è data dall'espressione: P= mg, quindi il termine fra
parentesi al 2° membro della 1.2.9) non può che essere l’accelerazione di gravità g:
g =
4π 2 1
⋅
kT rT2
1.2.10)
Di conseguenza, ricordando la 1.2.3), il rapporto fra l’accelerazione esercitata
dalla Terra sulla Luna aL e l’accelerazione esercitata sempre dalla Terra su un corpo
qualsiasi posto sulla sua superficie g, si può scrivere come:
4π 2 1
⋅
2
kT rTL
aL
=
g
4π 2 1
⋅
kT rT2
=>
a L rT2
=
2
g rTL
1.2.11)
Nella 1.2.11) la costante kT si semplifica perché in entrambi i casi ci si riferisce
sempre dalla Terra come corpo che esercita la forza. In questa equazione, tutti i termini
sono ricavabili sperimentalmente: l’accelerazione di gravità g, l’accelerazione centripeta
della Luna aL, la distanza Terra-Luna rTL, il raggio della Terra rT.
La verifica della eguaglianza 1.2.11) quindi, rappresenta la validità dell’ipotesi
fatta da Newton. Il calcolo del 1° membro della 1.2.11) porta al risultato:
aL =
4π 2 ⋅ rTL
TL2
g = 9,81
=
4π 2 ⋅ 3,84 ⋅ 10 8
(27 ,3 ⋅ 24 ⋅ 60 ⋅ 60 )
2
≅ 2.72 ⋅ 10 − 3
m
s
m
1.2.12)a
1.2.12)b
s2
aL
≅ 2,77 ⋅ 10 − 4
g
1.2.12)c
Mentre il calcolo per il 2° membro dà come risultato:
6 ,371 ⋅ 10 6
=
2
3.84 ⋅ 10 8
rTL
rT2
2
≅ 2.75 ⋅ 10 − 4
1.2.13)
I valori 1.2.12)c e 1.2.13) sono in ottimo accordo, confermando la validità della
uguaglianza 1.2.11). Pertanto si può affermare che:
● la forza esercitata dalla Terra, che vincola la Luna sulla sua orbita, è dello stesso
tipo di quella che viene esercitata dalla Terra sui corpi posti sulla sua superficie.
E poiché questa forza ubbidisce alle stesse leggi della forza che il Sole esercita
sugli altri pianeti e che gli altri pianeti come per esempio Giove, esercitano sui loro
satelliti (leggi di Keplero e leggi della dinamica), dobbiamo concludere che questa è una
forza di tipo universale e che in accordo con le considerazioni fatte deve ubbidire alla
relazione generale:
F =G⋅
M ⋅m
r2
1.2.14)
dove M ed m sono le masse dei corpi fra i quali si esercita la forza ed r la distanza fra i
loro centri. L'equazione 1.2.14), stabilita per la prima volta da Newton, è nota come la
Legge della Gravitazione Universale.
La costante G nell’equazione 1.2.14), è una costante universale, ovvero ha lo
stesso valore in qualsiasi punto dell’Universo e forse, è anche costante nel tempo da
quando l’Universo è stato creato fino ad oggi.*
La legge della gravitazione universale si applica a tutti corpi che abbiano una
massa. Essa regola la caduta dei corpi sulla Terra, il moto della Luna, il moto dei pianeti
intorno al Sole, l’attrazione fra stelle, la rotazione delle galassie, fino alla espansione
dell’Universo.
Questa legge è una della conquiste della conoscenza umana che maggiormente
hanno segnato il cammino dell’Uomo. L’applicazione al Sistema solare spiega il moto
dei pianeti e dei satelliti, le orbite delle comete e, tramite l’analisi delle reciproche
perturbazioni dei pianeti nelle loro orbite, è riuscita persino a prevedere l’esistenza e la
posizione di pianeti come Nettuno e Plutone che non erano mai stati precedentemente
osservati.
Il valore della costante universale G, che compare nella equazione di Newton, è
rimasto sconosciuto per molti anni dopo la formulazione della legge della gravitazione e
questo non ha permesso per molto tempo di conoscere le masse effettive dei vari corpi
celesti, ma soltanto il loro rapporto rispetto ad una di esse presa unitaria.
Per capire come è possibile arrivare ai rapporti fra le varie masse di un sistema in
cui agiscono forze gravitazionali analizziamo i sistemi Terra-Luna e Sole-Terra.
Nel sistema Terra-Luna, sia FG la forza di attrazione gravitazionale fra la Terra e
la Luna ed FC la forza centrifuga dovuta al moto di rivoluzione della Luna.
L’espressione esplicita delle due forze è:
FG = G ⋅
M T ⋅ mL
1.2.12)a
2
r TL
FC = mL ⋅ ω 2 rTL = m L ⋅
4π 2
rTL
1.2.12)b
TL2
Poiché il sistema è stabile, cioè la Luna non cade sulla Terra né si allontana
indefinitamente da essa, due forze 1.2.12) debbono essere uguali:
FG = FC
=>
G⋅
M T ⋅ mL
2
r TL
= mL ⋅
4π 2
TL2
rTL
1.2.13)
Semplici riduzioni algebriche della 1.2.13) portano alla:
3
4π 2 r TL
MT =
⋅
G TL2
1.2.14)a
ma, non conoscendo il valore di G, anche il valore di MT resta incognito.
Applicando gli stessi concetti al sistema Terra-Sole in cui la Terra gira intorno al
Sole, si può ottenere il rapporto fra la massa della Terra e quella del Sole. L’espressione
per la massa del Sole in analogia con la 1.2.14)a è:
---------------------------------------------------------------------------------------------------------*Non ci sono misure attendibili sul valore della costante di gravitazione universale nei primi istanti di
vita dell’Universo, né misure certe sulla sua possibile variazione fino ad oggi.
MS =
3
4π 2 r ST
⋅
G TT2
1.2.14)b
Quindi se non il valore assoluto delle masse, si può conoscere il rapporto fra di
esse. Considerando infatti le 1.2.14), per il rapporto fra le masse del Sole e della Terra si
ottiene:
3
4π 2 r ST
⋅
G TT2
r 3ST TL2
=
=
⋅
3
3
M
TT2 r TL
T
4π 2 r TL
⋅
G TL2
M
S
=>
r 3ST TL2
=
⋅
3
M
r TL
TT2
T
M
S
1.2.15)
Il 2° membro della 1.2.15), è formato da termini ricavabili sperimentalmente:
rST = 1,496 ⋅ 10 11 m
1.2.16)a
TT = (365 ,25 ⋅ 24 ⋅ 60 ⋅ 60 ) s = 3 ,147 ⋅ 107 s
1.2.16)b
rTL = 3 ,844 ⋅ 10 8 m
1.2.16)c
TL = (27 ,32 ⋅ 24 ⋅ 60 ⋅ 60 ) s = 2 ,36 ⋅ 10 6 s
1.2.16)d
per cui sostituendo i valori 1.2.16) nella 1.2.15) si ottiene:
2
(
1,496 ⋅ 10 11 ) 3 (2 ,36 ⋅ 10 6 )
3 ,35 ⋅ 10 33 5 ,57 ⋅ 10 12
=
⋅
≅
⋅
3
2
24
M
8
7
56
,
8
⋅
10
9 ,90 ⋅ 10 14
T
(3,844 ⋅ 10 ) (3,147 ⋅ 10 )
M
M
M
S
S
T
=
18 ,66 ⋅ 10 45
562.32 ⋅ 10
38
≅ 0 ,033 ⋅ 107 ≅ 3 ,3 ⋅ 10 5
1.2.17)a
1.2.17)b
la massa del Sole risulta cioè circa 330.000 volte più grande della massa della Terra.*
Non conoscendo l’effettiva massa della Terra, in quanto sconosciuta la densità
media del Pianeta, non si poteva conoscere né ricavare la massa del Sole, così come
degli altri corpi celesti, se non in modo relativo.
----------------------------------------------------------------------------------------------------------* I calcoli precedenti sono stati sviluppati dettagliatamente per mettere ancora una volta in evidenza
l’importanza della notazione scientifica per ricavare i valori finali delle grandezze fisiche.