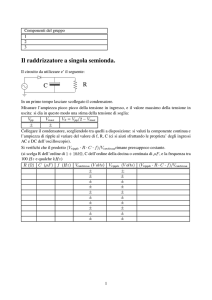
CIRCUITI DI IMPIEGO DEI DIODI Raddrizzare ad una semionda. Il circuito più semplice, che impiega il diodo come raddrizzatore di una tensione alternata, è rappresentato in Fig. 1. In esso un generatore ideale di tensione alternata il cui valore istantaneo è: Equazione 1 Figura 1
e(t ) Esen (t ) alimenta in serie, tramite il diodo, la resistenza RL, che costituisce il carico utile per il circuito. Ai capi della resistenza stessa si preleva la tensione raddrizzata utile Equazione 2 Vm RL I m Infatti il generatore di tensione alternata, polarizza in maniera diretta il diodo durante la semionda positiva [0, ] mettendolo in conduzione. Durante, invece, la semionda negativa [, 2] il diodo è polarizzato in modo inverso e quindi interdetto. Da notare che la massima tensione inversa a cui è sottoposto il diodo in questo intervallo è Emax. L'andamento della corrente anodica Im è allora di tipo pulsante, così come quello della tensione utile Vm. Se nel circuito di Fig 1 si fa l’equazione alla maglia si ottiene: Figura 2 Equazione 3 Emax VD Vm Vm Emax VD Dove VD è la c.d.t., dovuta alla resistenza interna del diodo. Questo sistema di raddrizzamento prevede ai capi del carico utile una tensione pulsante Vm ad una semionda (Fig. 2) il cui valore medio nel periodo, considerando la forma d'onda raddrizzata praticamente sinusoidale, vale: Equazione 4 Vm
E max
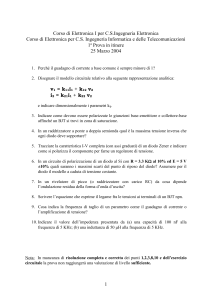
0.318 E max Raddrizzatore a doppia semionda. Per aumentare il valore medio della tensione raddrizzata e precisamente per raddoppiarlo, si ricorre al raddrizzamento a doppia semionda, impiegando due diodi con i catodi uniti come è rappresentato in Fig. 3 a). Questa volta l'alimentazione del circuito avviene attraverso un trasformatore, il cui primario è collegato al generatore di tensione alternata (rete di distribuzione dell’energia elettrica) e nel quale vi è un secondario di alta tensione, composto di due semiavvolgimenti uguali, la cui presa centrale è collegata a massa. Le due tensioni E1 e E2 uguali fra loro e disponibili agli estremi liberi dei due semiavvolgimenti sono fra loro sfasate di 180°, come si vede dal grafico di Fig. 3 b). Di conseguenza, i due anodi conducono alternativamente ogni 180° in modo che la tensione utile Vm, disponibile sui catodi, ai capi del carico RL, risulta raddrizzata a doppia semionda. Così facendo, il valore medio della tensione raddrizzata (pari al valore continuo nel periodo) risulta il doppio del precedente, ossia, considerando sempre sinusoidale la forma d'onda raddrizzata: Equazione 5 Figura 3 Vm 2
E max
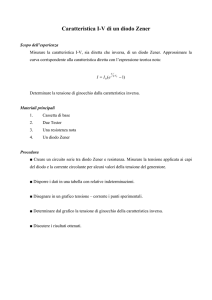
0.636 E max Se si desidera raddrizzare ambedue le semionde, non avendo a disposizione nel trasformatore il secondario di alta tensione a presa centrale, si riesce egualmente nell'intento, provvedendo, mediante un ponte di raddrizzatori, la cui disposizione è rappresentata in Fig. 4. Figura 4 Questo sistema ha il vantaggio, raddrizzando il ponte l'onda intera, di ottenere la stessa ampiezza e lo stesso andamento pulsante della tensione ai capi del carico, come quella del circuito di Fig. 3 con numero metà di spire sul secondario. Per contro, il circuito a ponte richiede 4 raddrizzatori. Circa il funzionamento del ponte di raddrizzatori, ci limitiamo ad osservare che, allorché giunge la semionda positiva, essa partendo dal nodo A passa attraverso il diodo 1, il carico anodico e, quindi, si chiude con il generatore tramite iI diodo 3. Quando giunge la semionda negativa, ossia positiva per il nodo B, essa percorrendo il diodo 2, il carico anodico, si chiude con il generatore attraverso il diodo 4. Da notare che in ambedue i casi, attraverso il carico la corrente ha circolato sempre nello stesso senso secondo il diagramma di Fig. 4 b). In questo caso trovandosi i diodi in serie a due a due, la massima tensione inversa a cui sono sottoposti è Emax I dati relativi alle grandezze in gioco nei circuiti di raddrizzamento a due semionde o a ponte di Graetz, sono riportati nella Tab. 1 Tabella 1 Dati sui circuiti di raddrizzamento. Nella Tab. 1 sono riportati i valori che legano fra loro le grandezze in gioco nei circuiti di raddrizzamento più comunemente usati in radio elettronica. Con E ed Emax, l ed lmax sono indicati i valori efficaci e massimi della tensione e della corrente di ingresso; con Vm, Veff Im, leff i valori medi ed efficaci delle tensioni e delle correnti al carico; con Vinv la tensione inversa a cui sono sottoposti i diodi; con ldp, ldm, ldeff le correnti di picco, media ed efficace nei diodi; con Kr il coefficiente di ripple, inteso come il rapporto fra il valore efficace della tensione della fondamentale della tensione di ripple e il valore medio della tensione al carico. Con VA la potenza apparente all'ingresso; con VAc la potenza dissipata da carico. Quest'ultima è data in funzione di Vm e di Im in quanto questi sono facilmente misurabili con uno strumento a bobina mobile. I dati della tavola si riferiscono ad un carico ohmico. Alimentatori Per il funzionamento dei circuiti elettronici occorrono sorgenti di energia continua; pertanto bisogna trasformare al valore desiderato e quindi raddrizzare la tensione alternata che viene fornita Figura 5 attraverso la rete di distribuzione. A tale scopo provvedono i così detti « alimentatori». Essi sono costituiti da un trasformatore di alimentazione, da un circuito rettificatore e da un litro di livellamento. Lo schema a blocchi di un alimentatore è riportato in Fig 5. Il circuito trasformatore è costituito da un trasformatore o da un autotrasformatore il quale ha il compito di trasformare il valore di tensione dal valore di rete 230V al valore di tensione desiderato 12 – 24 ‐
9 etc. a seconda della destinazione d’uso. Il circuito rettificatore è del tipo di quelli considerati nei paragrafi precedenti, e come si è osservato la tensione di uscita Vm ai capi del carico utile RL è di tipo pulsante (a semplice o a doppia semionda). Nel tipo a una semi onda il valore medio nel periodo della tensione ai capi della resistenza di carico RL, vale: Equazione 6 Vm
E max
0.318 E max
mentre nel raddrizzamento a doppia semionda il valore medio raddoppia, ossia: Equazione 7 Vm 2
E max
0.636 E max
In entrambi i casi, la tensione pulsante d'uscita è allora composta da una componente continua, che è pari al valore medio della tensione raddrizzata, e da una componente alternata, la quale non essendo perfettamente sinusoidale, è composta, a sua volta, da una frequenza fondamentale e da armoniche. Dato che il circuito viene alimentato dalla rete di distribuzione dell'energia elettrica, la cui frequenza è di 50 Hz, nel raddrizzamento a una semionda la frequenza fondamentale della componente pulsante è 50 Hz, mentre nei raddrizzamento a doppia semionda tale frequenza raddoppia, ossia è pari a 100 Hz. Il filtro di livellamento è indispensabile per poter rendere praticamente continua la grandezza pulsante fornita dal raddrizzatore. La sua funzione è quella di eliminare la componente alternativa della tensione raddrizzata e di aumentare in larga misura il valore medio della componente continua d'uscita, in modo che essa raggiunga l'85 ÷ 90 % del valore massimo della tensione raddrizzata. Filtri di livellamento. FILTRO CAPACITIVO. Prendiamo in esame il circuito di Fig. 6 a) in cui, In un normale circuito di raddrizzamento ad una semionda, si è posto in parallelo al carico RL un condensatore C di elevata capacità. Durante il primo quarto d'onda il condensatore si carica al valore massimo della tensione del generatore Emax (Fig. 6 b), portando di conseguenza anche il catodo del raddrizzatore a questa tensione. Quando la tensione del generatore scende a valori inferiori a quelli della tensione catodica, ossia alla carica massima raggiunta dal condensatore, il diodo si interdice. Durante questo intervallo è il condensatore che si improvvisa generatore e, mediante la corrente di scarica, fornisce energia al carico (tempo t0 ÷ t1). La scarica è tanto più rapida quanto più piccolo è il condensatore C e la resistenza di carico RL. Appena la tensione ai capi dell'anodo raggiunge e supera la tensione residua ai capi del condensatore, circola corrente nel diodo, ed il condensatore si ricarica con un impulso di corrente tanto più intenso quanto più grande è la capacità stessa, recuperando gli [Asec.] perduti nella scarica. Infatti nel breve tempo t1 ÷ t2 il condensatore deve reintegrare la quantità di corrente perduta nel tempo t0 ÷ t1, in modo che l'area della scarica eguagli quella della ricarica. Per l'integrità del diodo, viene limitato dal costruttore il guizzo di corrente di ricarica del condensatore, indicando il valore massimo di capacità da collegare tra catodo e massa. Come si era detto in precedenza e come si può intuitivamente dedurre dal grafico di Fig. 6 b) la tensione al carico è composta da una parte continua con sovrapposta una componente alternata. Quest'ultima prende il nome di tensione di ripple: Vr. Il rapporto tra il valore efficace della tensione di ripple e il valor medio della tensione al carico è chiamato coefficiente di ripple Kr. Figura 6 Equazione 8 Kr
Veff
Vm
Tanto più piccolo è Kr tanto migliore è l'alimentatore: Per diminuire il valore della tensione di ripple si può usare un circuito raddrizzatore a due semi onde o a ponte di Graetz. In tal, caso, fermo restando il processo di carica e scarica del condensatore, si dimezzano i tempi di attuazione del ciclo e la frequenza della tensione di ripple è doppia rispetto a prima. FILTRO A PI GRECO. Per limitare ulteriormente il valore della tensione di ripple, si interpone tra il condensatore C, e il carico RL una cella LC come in Fig. 7, ottenendo così un filtro detto a pi greco. Vediamo quanto vale il ripple della tensione sul carico. Per il calcolo del ripple occorre calcolare Veff sul carico. Figura 7
Se indichiamo con VR1eff la tensione sul condensatore C1, rappresentante la tensione che si avrebbe sul carico se non ci fosse il filtro a pi greco, e con VR2eff la tensione sul carico, quando agisce il filtro. Applicando il partitore di tensione si ha: Equazione 9 V R 2 eff
X c2
V R 1 eff
X L X C2
Ricordando l’equazione 8, sostituendo l’equazione 9 si ha: Kr2
VR 2 eff
Vm
V
X c2
X c2
X c2
K r1
VR1eff R1eff
Vm X L X C 2
Vm X L X C 2
X L XC2
Analizziamo il termine: X c2
X L XC2
1
1
1
j C 2
1
jC 2
j C 2
2
2
2
1
LC
1
j
C
LC
1
LC
1
2
2
2
2
jL
j C 2
jC 2
Essendo LC2 > 1 allora Kr2 < Kr1. quindi il ripple su un alimentatore con filtro a pi greco risulta ridotto. Allo stesso risultato si arriva se si considera il circuito di figura 8 Figura 8 I dati relativi alla grandezze in gioco sono riportati nella Tab. 2. Tabella 2 Per la progettazione di un alimentatore con diodi a semiconduttore, oltre che dei dati riportati nella tavola, ci si può servire dei diagrammi di Fig. 9, 10, 11 e 12. Figura 9 Figura 10 Figura 11 Figura 12 In essi sono riportati, in funzione del prodotto n2fCRL e Requ
nRL
i valori di Vm I dp I deff
;
;
Emax I dm I dm
Il valore di n è 1 per i circuiti di raddrizzamento a una semi onda, 2 per quelli ad onda intera. Req è la somma di RS + Rdifferenziale del diodo + Rdegli avvolgimenti del trasformatore. I valori del rapporto, I dp
I dm
e
I deff
I dm
servono per la scelta dei diodi da impiegare, per il calcolo della loro temperatura di funzionamento e, quindi, per il tipo di montaggio da preferire; dati questi che vengono forniti dal costruttore per ogni tipo di diodo. Esempio: Con il circuito di Fig. 13 si vuole alimentare un carico RL = 50. Supposti: E = 12V e C = 2000F si determinino i valori delle tensioni e correnti nel carico e nel diodo. Figura 13 Risoluzione: Dalla Tab. 2, nei dati relativi al tipo di filtro, si ha: C
5
5
0.02 F 2000 F fRL 50 50
Quindi il nostro condensatore verifica la condizione. Il valore della tensione Vm sul carico si determina dalla stessa tabella. Vm
Emax
2 12
15.4V 1
1
1
1
2 fCRL
2 50 2000 10 6 50
La corrente sul carico e sul diodo vale: I dm
Vm 15.4
0.308 A RL
50
La tensione inversa del diodo deve essere almeno: Vinv = 2Emax = 33.94 V Il coefficiente di ripple vale: Kr
1
1
0.058 5.8%; 3.46 fRL C 3.46 50 50 2000 10 6
Vediamo se il diodo scelto BYX36 soddisfa le condizioni: calcoliamo: n2fCRL n2fCRL 1 2 3.14 50 2000 106 50 31.4 nel digramma di figura 11 si evidenzia la curva relativa la termine n 2fCR L 31.4 (fig. 14). Si tira una linea parallela, all’asse delle x, partendo dal punto Vm
15.4
0.91 Emax
2 12
La corrispondente ascissa Figura 14
vale: Req
RL
0.0032 Req 0.0032 RL 0.16 Dai diagrammi di figura 11 e 12, con analogo procedimento si ricavano: I dp
12.5 I dp 12.5 I dm 12.5 0.308 3.85
I dm
I
deff 3.15 I 3.15 I 3.15 0.308 0.97
deff
dm
I dm
Quindi il diodo sarà scelto in funzione di: Idp = 3,85 A, Idm = 0,308 A, Vinv 2 2 12 33.84V . Il diodo BYX26, avendo: Idm = 0,8 A, Idp = 5 A, Vinv = 100 V, soddisfa alle condizioni richieste. Duplicatore di tensione. È il circuito più comunemente impiegato allorché si deve alimentare un radioricevitore od un televisore, quando esistono problemi di economia e d'ingombro. Infatti, con questo circuito, si può evitare l'impiego del trasformatore di alimentazione, collegando il circuito direttamente alla tensione di rete. Il duplicatore di tensione rappresentato in Fig. 9 funziona Figura 15 nel seguente modo. Il diodo 1, per effetto della carica al valore massimo di C1, si trova ai suoi capi (A e B) la tensione che varia fra lo zero ed il doppio della tensione massima di rete. Questa tensione, pari a 2Emax, tramite il diodo 2, la cui caduta interna nel senso della conduzione, è praticamente trascurabile, viene trasferita per intero ai capi del condensatore elettrolitico C2 e quindi ai capi del carico RL come tensione continua, secondo le polarità indicate nella figura stessa. Triplicatore di tensione. Il triplicatore di tensione è raramente impiegato perché presenta una forte componente di ronzio ai capi del carico RL. La Fig. 10 rappresenta lo schema elettrico del triplicatore. In esso, durante la semionda positiva, della tensione di rete, il condensatore C1 si carica attraverso il diodo 1, a Emax. Successivamente la semionda negativa, per effetto della C1, carica C attraverso il diodo 2 al potenziale 2 Emax. Nella Figura 16 successiva semionda positiva conduce il diodo 3 che provvede, caricando C3 a 2Emax (tensione presente ai capi di C2) a stabilire ai capi del carico RL un potenziale parti a 3Emax. Naturalmente l'isolamento dei condensatori elettrolitici C2 e C3 deve essere proporzionato alle tensioni in gioco. Quadruplicatore di tensione. II quadruplicatore di tensione (come anche, il triplicatore) viene impiegato, di solito, per l'alimentazione degli elettrodi dei tubi a raggi catodici per osciIIoscopi, dove alta è la tensione che occorre e bassa è la corrente che si richiede (qualche mA). Lo schema del quadruplicatore è rappresentato in Fig. 11. Il Figura 17
funzionamento è molto evidente: infatti, si può notare l'impiego di due duplicatori di tensione collegati in modo da sommare le loro tensioni d'uscita. Infine, in Fig. 12 è rappresentato un circuito generale di moltiplicatore di tensione, capace di moltiplicare la tensione di alimentazione per un fattore intero qualsiasi. Indicando con n il numero di volte che si vuole moltiplicare il valore massimo della tensione di rete, il numero di diodi da impiegare è pari ad n stesso. Figura 18 Alimentatori stabilizzati. Stabilizzare un alimentatore significa rendere indipendente, entro discreti limiti, la sua tensione di uscita sia dalle variazioni della tensione di rete, sia dalle variazioni della corrente assorbita dal carico. Questo secondo caso si verifica normalmente quando l'alimentatore provvede all'alimentazione di amplificatori. Infatti essi richiedono, sotto tensione costante, una corrente tanto più intensa quanto è più elevata la loro potenza di uscita. Si può allora dedurre che il carico RL, equivalente all'amplificatore, rispetto ad una determinata condizione di funzionamento, aumenta o diminuisce il suo valore (richiedendo quindi più o meno corrente) rispettivamente al dimimùre o al crescere della potenza di uscita. Impiego del diodo Zener come stabilizzatore di tensione. Negli alimentatori per circuiti che richiedono correnti non molto elevate, si ottiene una sufficiente stabilizzazione della tensione di uscita mediante l'impiego dei diodi Zener. Il diodo va posto in parallelo al carico, mentre tra il filtro di livellamento (che spesso si riduce ad una sola grossa capacità) ed il carico stesso va Figura 19 posto un resistore RS, come illustrato in Fig. 13. La variazione della tensione di uscita Vu è data da: Vu SVi R0 I L S Z T Equazione 10 Dove: coefficiente di stabilizzazione resistenza d’uscita Equazione 11: Equazione 12: S
Vu
1
Vi 1 RS RS
rZ RL
R0
Vu
rR
z S
I L rz RS
SZ (coefficiente di temperatura) fornito dal costruttore. rZ è la resistenza differenziale del diodo Zener nella zona di funzionamento, valore fornito dal costruttore. In generale: Equazione 13 VU VZ rZ I Z Equazione 14 Vi I Z I L RS Vu Equazione 15 RS
Vi Vu
IZ IL
Equazione 16 IZ
Vi Vu
IL RS
Equazione 17
V V
PZ VZ i u I L
RS
L'alimentatore stabilizzato deve fornire una tensione di uscita la più costante possibile al variare di Vi o di IL. In pratica perciò si possono verificare tre casi: 1. Vi e IL variano entrambi; 2. Vi varia mentre IL rimane costante; 3. Vi è costante mentre varia IL Scegliendo come corrente minima di Zener (Izmn) circa il 10 % di ILmax, si ha: Condizione 1: Equazione 18 RS
Vi min Vu
1.1I L max
Equazione 19 VZ Vu rz 1.1I L max I L min Equazione 20 I Z max 1.1I L max I L min Equazione 21
V
V
PZ max VZ i max u I L min RS
Equazione 22 RS
Equazione 23 VZ Vu Equazione 24 V
V
PZ max VZ i max u I L RS
Equazione 25 RS
Equazione 26 VZ Vu Equazione 27 V
V
PZ max VZ i max u I L min RS
condizione 2: Vi min Vu
1.1I L max
condizione 3: Vi Vu
1.1I L max
Dove VZ è intesa la tensione di Zener e con PZmax la massima potenza dissipata dallo Zener. Esempio: Disponendo di una tensione Vi = 14 ± 2 V, si vuole alimentare, con il circuito di Fig. 20 un carico alimentato ad una tensione Vu= 9 V e che assorbe una corrente, IL , variabile da 50 a 300 mA. Calcolare i valori di: RS, tensione, corrente e potenza del diodo zener, supposto rZ = 2.5 . Risoluzione. Vi e IL variano entrambe, pertanto ci troviamo nella condizione 1, per cui: Figura 20 RS
Vi min Vu
14 2 9
9
1.1I L max 1.1 300 10 3
VZ Vu rz 1.1I L max I L min 9 2.5 1.1 300 10 3 50 10 3 8.3V I Z max 1.1I L max I L min 1.1 300 10 3 50 10 3 280mA
V
Vu
14 2 9
PZ max VZ i max
I L min 8.3
50 10 3 6.04W RS
9
Stabilizzazione con transistore in serie. Un altro metodo per stabilizzare la tensione di uscita di un alimentatore è quello di porre in serie, fra il filtro di livellamento e il carico, un transistore la cui base è mantenuta ad un potenziale costante mediante un diodo Zener (Fig. 21). La tensione base‐emettitore del transistore è data dalla differenza fra la tensione di Zener e quella di uscita: Figura 21 Equazione 28 VBE Vz Vu Ad ogni variazione di Vu corrisponde quindi una variazione di segno opposto di VBE. Pertanto se Vu aumenta: VBE diminuisce, rendendo meno conduttore il transistore, che aumentando di conseguenza la sua VCE, compensa l'aumento di Vu . Il processo inverso avviene allorquando Vu diminuisce. In pratica, per ottenere una sufficiente stabilizzazione, si sceglie Equazione 29
V 1.5 2V
u
i
I
5
I
Z
B
IL
I B
hFE
Inoltre: la potenza dissipata dal transistor vale: Equazione 30 PD Vi Vu I L R1 vale: Equazione 31 R1
Vi VZ
IB IZ
La potenza dissipata dal diodo zener è: Equazione 32 V VZ
I B VZ
Pz i
R1
Esempio: Disponendo di una tensione Vi = 14 ± 2 V, si vuole alimentare, con il circuito di Fig. 20 un carico alimentato ad una tensione Vu= 9 V e che assorbe una corrente, IL , variabile da 50 a 300 mA. Calcolare i valori di: RS, tensione, corrente e potenza del diodo zener, supposto rZ = 2.5 inoltre il transistor ha i seguenti dati: hFEmin = 45 e hFEmax = 130 Dimensionare il circuito di figura 22: Risoluzione. La potenza del diodo deve essere: PD max Vi max Vu I L max 14 2 9300 10 3 2.1W
Fissati (mettendosi nelle condizioni peggiori): VZ Vu 9V
I 5I
B max 30mA
Z
I L max 300 103
I
6.5mA
B max
h
130
FE max
I L min 50 10 3
I B min
0.38mA
hFE min
45
Si determina: R1
Vi max VZ
14 2 9
192 I B max I Z 6.5 3010 3
La potenza dissipata dal diodo vale: V
VZ
14 2 9
I B min VZ
Pz max i max
0.38 103 9 0.324W R1
192
Il diodo Zener BZX29C9V1 soddisfa alle condizioni richieste.