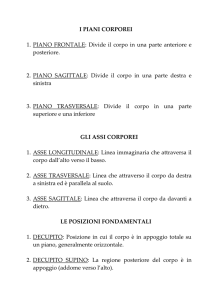
Deambulazione umana
(approfondimento esercizio)
1
Deambulazione
• movimento che produce locomozione
• negli umani include:
–
–
–
–
cammino,
corsa,
nuoto,
pedalata, etc
• caratteristiche:
– Bilancio energetico
– Flessibilità nell‟adattarsi a velocità, terreni, condizioni etc.
differenti
– Meccanismi di controllo sofisticati (deambulazione bipede o
instabile)
2
3
CONTENUTO
1.
2.
3.
Termini e definizioni di base
Visione di insieme
Forze in gioco:
peso, reazione al terreno, forze muscolari
4. “Determinanti” del cammino
5. Considerazioni sull‟energia
6. Corsa e cammino
Nozioni necessarie:
Movimenti ed anatomia funzionale dei complessi mioarticolari
4
Evoluzione del cammino
La marcia automatica ed altri riflessi sono presenti alla nascita, in seguito alla
maturazione neurale cefalo caudale si assiste alla loro progressiva sparizione
ed alla comparsa del cammino autonomo
•Startle reflex
•Riflesso tonico del collo
•Riflesso di raddrizzamento
•s. di Babinski
•Crawling
•Marcia automatica
Il raggiungimento della marcia bipede “centra” e riduce le oscillazioni della
GRF
5
Il risparmio di energia ha portato alla stazione eretta
Gli Umani si sono evoluti verso il cammino bipede in stazione
eretta perché questo tipo di deambulazione richiede un
dispendio energetico molto inferiore; il cammino umano, dal
punto di vista della spesa energetica, è circa 4 volte più
efficiente di quello di uno scimpanzé che procede alla stessa
velocità con l’appoggio sui quattro arti.
6
Costo netto della progressione (ml di O2 kg−1 m−1)
Costo netto della progressione (ml di O2 kg−1 m−1) per lo scimpanzè in cammino
quadrupede e bipede e per l’uomo
scimpanzè
(cammino quadrupede)
scimpanzè
(cammino bipede)
uomo
Sockol M D et al. PNAS 2007;104:12265-12269
Massa corporea (Kg)
Lavoro a livello delle varie articolazioni e di tutto l’arto inferiore
durante la fase di appoggio
Comparazione della meccanica del cammino (scimpanzè / umano)
CAMMINO E CORSA
CAMMINO = TIPO DI DEAMBULAZIONE IN
CUI AVVIENE UNA PROGRESSIONE NELLO
SPAZIO ALTERNANDO L’ANTEPOSIZIONE DI
UN ARTO INFERIORE ALL’ALTRO
MANTNENDO COMUNQUE ALMENO UN PIEDE
A TERRA
CORSA = COME IL CAMMINO MA SENZA IL
MANTENIMENTO DI UN PIEDE A TERRA
10
11
Termini di base
• Stride: ciclo completo di deambulazione, misurato tra un
appoggio calcaneare ed il successivo del medesimo piede
• Step (= passo): intervallo dall’appoggio calcaneare di un
piede appoggio calcaneare successivo dell’altro piede
• pertanto: 1 stride = 2 steps
• I termini “stride” (falcata) e “step” (passo) possono riferirsi
ad una qualsiasi delle seguenti proprietà rilevanti del
movimento:
• durata nel tempo
• distanza coperta
• numero di cicli
12
Distribuzione percentuale del tempo di ciclo del passo
Appoggio
10%
Doppio
contatto
0
Oscillazione
10%
Singolo contatto
Doppio
contatto
50
10%
Singolo contatto
Doppio
contatto
100
% in tempo del
ciclo del passo
13
14
carreggiata
15
Le 8 sottofasi temporali del ciclo del passo
Appoggio
1
2
3
10%
contatto
iniziale
risposta
al carico
4
30%
0
Oscillazione
5
50%
6
60%
7
73%
8
87%
50
appoggio
intermedio
pre
appoggio
oscillazione
finale
100
oscillazione
iniziale
% in tempo del
ciclo del passo
oscillazione
terminale
oscillazione
intermedia
16
• Cadenza: = steps al minuto
• Ciclo tempo di (= stride time): durata in secondi dello stride
• pertanto, tempo di ciclo = durata dello stride
= 2 x durata dello step
= 2 x 60/cadenza = 120/cadenza
• In un maschio adulto:
Cadenza
Ciclo
tempo (s)
90-135
0.9-1.3
Stride
Velocità
lunghezza (m)
(m s-1)
1.2-1.8
1.1-1.8
• la velocità e lunghezza naturali sono molto vicine alla
condizione di efficienza energetica ottimale
•
NB: la velocità di cammino nelle zone urbane è più elevata che
nelle zone rurali !
17
Efficienza del cammino e della corsa
(a) Consumo Metabolico
[potenza (W)]
Potenza metabolica (energia
utilizzata al secondo) per sostenere
il cammino (blu) e la corsa (rosso) a
diverse velocità.
Mentre il cammino a basse velocità
è molto economico, il cammino
veloce (> 2m/s = 7km/h) e la corsa
richiedono molta energia
18
Efficenza del cammino e della corsa
(b) Economia (J m-1)
Utilizzo di energia metabolica
per metro di avanzamento
(andamento opposto rispetto
al precedente).
Blu = cammino; rosso = corsa
l‟efficienza ottimale per metro
percorso (utilizzo minimo di
energia si ha per velocità
intermedie di marcia (3,5
km/h))
19
Forze
• Le principali forze in gioco sono:
– Il peso del corpo (BW)
– La forza di reazione al terreno (GRF)
– La forza muscolare (MF)
• BW e GRF sono forze esterne; pertanto il moto del
centro di massa (CoM) può essere predetto solo da
loro
• MF deve essere preso in considerazione se si
vogliono studiare :
– il moto di singoli arti o segmenti corporei
– i cambiamenti di intensità e direzione di GRF durante
la deambulazione.
20
Punto molto importante:
Le forze muscolari possono
influenzare il movimento del
corpo nel suo insieme solo
indirettamente attraverso i loro
effetti sulla reazione al terreno.
21
Il meccanismo del cammino: una
panoramica
• Il cammino è un insieme preciso e coordinato di
movimenti che coinvolge molteplici articolazioni e
segmenti corporei
• Comprende uno schema di azione alternata dei due
arti inferiori
• I movimenti pendolari degli arti avvengono in 2 fasi: il
volo (oscillazione) e l‟appoggio (stance)
• Nel cammino, ma non nella corsa, le fasi di appoggio
si sovrappongono
22
Il cammino come “caduta controllata”
e le forze coinvolte
• Un modo di comprendere la meccanica del cammino è di
considerarne i movimenti come una “caduta controllata”
• quando si inizia il cammino ci si piega in avanti, (MF)
sbilanciandosi dalla posizione di equilibrio.
• Lo sbilanciamento imprime alla parte superiore del corpo
un moto in avanti ed in basso
• Come il corpo cade in avanti (BW), un‟arto inferiore si
estende in avanti ed arresta la caduta (MF; GRF)
• Contemporaneamente l‟altro arto “calcia e decolla” (MF;
GRF) per mantenere il moto in avanti del corpo.
• Il momento anteriore che si genera porta in avanti il corpo
verso la successiva “caduta” (il passo seguente) ed il ciclo
si ripete.
23
Peso del corpo (BW)
• Agisce sempre verso il basso lungo la verticale calata
dal CoM
• Se la sua linea d‟azione non passa attraverso
un‟articolazione produrrà su di essa un momento
torcente (imprimerà una coppia)
• La coppia causerà la rotazione dell‟articolazione a
meno che non vi si opponga un‟altra forza
(contrazione muscolare o vincolo legamentoso)
• BW contribuisce alla GRF
24
Forza di reazione del terreno
(Ground Reaction Force = GRF)
Forza di “azione”
• spinta esercitata sul terreno dal piede
• Risulta dalla somma di:
peso del corpo + forza di impatto del piede sul terreno (solo al
momento dell’appoggio calcaneare) + “forza di spinta” dovuta
alla contrazione dei muscoli estensori (verso la fine della fase di
stance)
Forza di “reazione”
• Spinta esercitata dal terreno sul piede, conseguenza della 3a
legge di Newton.
• Eguale intensità, stessa direzione, verso opposto, medesimo
punto di applicazione della forza di azione.
• Se la linea di azione della forza di reazione è esterna ad
un‟articolazione determinerà una coppia che tende a farla
ruotare
25
Forza muscolare
Nella deambulazione, come in tutti I movimenti umani,
l‟attività muscolare genera momenti interni alle
articolazioni (coppie) che:
–
–
–
–
–
Contribuiscono alla forza di reazione al terreno
Assicurano il bilanciamento
Aumentano l‟economia energetica
Permettono degli schemi deambulatori flessibili
Rallentano od impediscono i movimenti incontrollati degli arti
La maggior parte dell’attività muscolare nella deambulazione è
eccentrica o isometrica, piuttosto che concentrica
26
Effetti combinati della forza muscolare e del peso del
corpo (BW) sulla GRF in stazione eretta _ 1
• Nella stazione eretta la somma delle due GRF (una per
ciascun piede) è uguale ed opposta a BW, si ha una
condizione di equilibrio e non c'è movimento
• Quando pieghiamo le ginocchia, durante la fase di
movimento verso il basso l‟intensità di GRF scende
sotto il BW.
• Questo avviene perché la flessione delle articolazioni
dell‟arto inferiore impedisce che l‟intera forza peso del
corpo si trasmetta verso il basso attraverso i punti di
contatto tra piede e suolo
• In tal modo si genera una forza netta che agisce sul
corpo verso il basso e l’intero corpo si muove verso
il basso.
27
Effetti combinati della forza muscolare e del peso del
corpo (BW) sulla GRF in stazione eretta _ 2
• Quando l‟individuo raggiunge il punto inferiore del
piegamento la somma delle due forze GRF (una per
ciascun piede) è di nuovo uguale ed opposta al BW. Si
raggiunge ancora una condizione di equilibrio e,
momentaneamente, non si ha movimento
• Quando ci rialziamo dal piegamento, durante la fase di
movimento verso l'alto l‟intensità di GRF aumenta sopra
il BW.
• Ciò è possibile perché l‟estensione delle articolazioni
dell‟arto inferiore aumenta l‟azione della forza che
spinge contro il suolo a valori superiori al peso del corpo
sovrastante.
• In tal modo si genera una forza netta che agisce sul
corpo verso l’alto e l’intero corpo si muove verso
l’alto
28
L'attività muscolare influenza il GRF
Ciò che causa le alterazioni della GRF durante un piegamento è il
rilasciamento dei muscoli estensori durante la fase discendente e la
loro contrazione concentrica durante la fase di risalita. Le variazioni
di attività muscolare influenzano il GRF modificando l‟intensità della
pressione che i piedi esercitano contro la superficie di appoggio.
• Pertanto :
GRF (per definizione uguale ed opposta alla forza esercitata dal piede sul
terreno) = Peso del corpo(BW) + qualsiasi attività muscolare estensoria
Quando gli estensori si rilasciano, il peso del corpo non può più essere
trasmesso efficacemente sul piede (perché non c'è più una struttura
rigida per trasmetterlo)
• Pertanto :
GRF = uguale ed opposta alla forza esercitata dal piede sul terreno< Peso
del corpo
29
Per riassumere:
• GRF + = BW
– Il CoM del corpo manterrà la medesima quota (o rimarrà in
moto costante)
• GRF + > BW (ad es.: salto)
– Il CoM del corpo si muoverà verso l'alto (o il movimento
verso il basso del CoM sarà rallentato o arrestato)
• GRF + < BW (ad es.: piegamento)
– Il CoM del corpo si muoverà verso il basso (o il movimento
del CoM verso l'alto sarà rallentato o arrestato)
30
postura statica :
GRF uguale ed
opposto BW
piegamento
verso il basso :
movimento
verso l'alto :
GRF<BW
GRF>BW
31
Rilevazione della GRF durante l‟appoggio
Piattaforme di forza (pedane stabilometriche)
32
Diagramma a farfalla della GRF durante la fase
di stance (appoggio)
Le linee rappresentano I
vettori di forza della GRF
a intervalli di ca. 50 ms
durante la fase di stance
La linea all‟estrema
sinistra rappresenta il
vettore forza nel momento
di impatto del calcagno sul
terreno. La linea
all‟estrema destra
rappresenta la GRF
quando il 1° dito lascia il
terreno.
NB: le linee dei vettori incorporano 3 aspetti della
forza che rappresentano : intensità (=lunghezza della
linea), punto di applicazione, e direzione di azione 33
Diagramma della GRF nei vari piani convenzionali
34
Componenti verticali e orizzontali della GRF
•
“A” rappresenta la GRF al momento
dell‟impatto calcaneare.
•
Ha una componente orizzontale (C) e una
verticale (B).
•
È la somma vettoriale
35
Componenti verticali e orizzontali della GRF
• Sia la componente orizzontale che quella verticale
variano durante la fase di stance.
• Il verso della componente orizzontale (cioè verso
l'avanti o verso l'indietro) identifica se il corpo in
quell‟istante accelera o decelera il suo movimento
verso l'avanti.
• La grandezza della componente verticale (e
specificamente se è maggiore o minore del peso
del corpo) descrive il movimento verticale del corpo
36
La GRF durante la fase di contatto
•
Inizialmente la GRF agisce diagonalmente verso l'indietro e verso
l'alto, a partire dal calcagno. Il peso del corpo agisce verso l'indietro,
ma la componente verticale della GRF è maggiore del peso del corpo
pertanto in questo istante :
– Ferma la “caduta controllata verso il basso” del corpo
– Esercita un effetto frenante sul movimento in avanti
•
Durante la parte intermedia della fase di stance la GRF:
– resta > peso del corpo e pertanto il CoM è lievemente sollevato.
– Il punto di azione si muove in avanti rispetto al calcagno.
– La linea di azione diviene sempre più verticale e pertanto l‟effetto
frenante/rallentante sparisce
•
Dopo la mezzeria della fase di stance la componente verticale della
GRF cade (< peso del corpo), nell‟istante in cui l‟arto inferiore
oltrepassa la posizione verticale il CoM si muove verso il basso.
•
Alla fine della fase di stance, la GRF si incrementa ancora, agendo
verso l'avanti e verso l'alto e fornendo la forza propulsiva necessaria
per fermare il movimento verso il basso del CoM, e per mantenere il
movimento del corpo verso l'avanti.
37
Cambiamenti di posizione del centro di pressione (CoP)
• Il CoP è inizialmente
vicino al margine laterale
del calcagno
• Come la fase di stance
(appoggio) progredisce, si
muove verso l'avanti e
medialmente, finendo
sotto l‟alluce.
38
Pressogramma plantare (baropodogramma)
La linea tratteggiata rossa
rappresenta la
traiettoria del CoP
durante una singola fase di
stance
I colori denotano I picchi
pressori raggiunti in
differenti punti sul piede.
39
Determinanti della deambulazione (Dd)
• 6 specifici aspetti che incrementano l‟
efficienza del cammino e della corsa
• Tutti riducono i movimenti non necessari della
parte superiore del corpo, sia verticali, sia
orizzontali sull‟asse laterale
40
41
Dd1: basculamento pelvico
Riduce i movimenti
verticali del corpo
sovrastante e aumenta
l‟efficienza energetica.
•
La pelvi si inclina verso il basso lateralmente dal lato dell‟arto in fase di
oscillazione. cioè ruota attorno ad un asse antero-posteriore
•
È anatomicamente possibile se l‟oscillazione dell‟arto inferiore può essere
accorciata per liberare un terreno sufficiente all‟appoggio (principalmente grazie
alla flessione di ginocchio).
•
Quando non è possibile (ad es.: dopo un trauma), si ha assenza di basculamento
pelvico e, ovviamente, si hanno pronunciati movimenti della parte superiore del
corpo
42
Spostamento del baricentro sul piano verticale
43
Dd2: rotazione pelvica
•
A lunghezza fissa di passo la rotazione su un‟asse verticale consente di
ridurre l’escursione verticale del tronco
•
Di converso, a parità di escursione verticale del tronco, possono essere
raggiunte lunghezze di passo maggiori
44
Spostamento del baricentro sul piano orizzontale
45
46
47
Dd3: flessione di ginocchio nella fase di stance
•
durante la fase di appoggio quando l‟anca passa sopra il piede vi è una certa
flessione del ginocchio.
•
questo riduce i movimenti verticali dell‟anca, e, di conseguenza, del tronco e
della testa
48
Dd4: meccanica della caviglia
• Al momento del contatto la lunghezza effettiva dell‟arto inferiore
è incrementata dalla proiezione del calcagno dietro la caviglia.
• Questo è possibile grazie alla dorsiflessione della caviglia
49
Dd5: meccanica dell’avampiede
•
Durante la parte finale della fase di appoggio, l‟avampiede serve ad
incrementare la lunghezza effettiva della leva dell‟ arto inferiore.
• Questo è possibile grazie alla flessione plantare della caviglia
50
Dd6: Riduzione della lateralizzazione pelvica
• Si può minimizzare restringendo la base del cammino cioè mantenendo i
piedi più vicini tra loro delle anche
• Questo consente di usare meno energia per muovere le anche da un lato
all‟altro (è necessario un minor movimento laterale per bilanciare il corpo sul
piede di appoggio).
• È permesso dall‟angolo in valgismo del ginocchio
51
Economia (J m-1)
considerazioni su efficienza e energia
• Energeticamente il cammino è molto efficiente: usa pochissimo ATP
perché vi sono vari meccanismi che assicurano il passaggio dell‟energia
meccanica del corpo da un passo all‟altro
•
Le due forme di energia meccanica coinvolte sono
•energia cinetica (energia dovuta al movimento)
•energia potenziale (energia dovuta alla posizione)
52
Efficienza della deambulazione e azione pendolare
• Un pendolo è un oggetto, che oscilla da un fulcro,
sotto l‟influenza della gravità.
• Un pendolo ha una frequenza di oscillazione naturale
che dipende dalla sua massa e dalla distanza dal
fulcro del suo CoM.
• durante l‟oscillazione di un pendolo, l‟energia
potenziale e cinetica sono interconvertite e,
pertanto, l‟ energia complessiva, è conservata.
• Sia gli arti superiori che inferiori del corpo umano
possono muoversi con moto pendolare, con o senza
intervento muscolare.
53
Interconversione di energia in un pendolo
convenzionale
P.E. – energia potenziale
K.E. – energia cinetica
Sono illustrati 3 punti
dell‟oscillazione di un pendolo.
Man mano che il pendolo oscilla
lontano dalla mezzeria KE è
progressivamente convertita in PE
Nei punti estremi dell‟ oscillazione,
non c'è più KE e tutta l‟energia è
presente come PE
54
Azione di un pendolo convenzionale
durante la fase di oscillazione
• Gli arti inferiori si muovono come pendoli convenzionali durante
la fase di oscillazione (con minima assistenza da parte dei
flessori dell‟anca).
• Questo riduce l‟ammontare dell‟energia muscolare necessaria
per muovere l‟arto inferiore che oscilla in avanti
• Spiega anche la frequenza “naturale” della deambulazione che
è quella per cui si ha l‟efficienza energetica ottimale
• Mentre l‟oscillazione anteriore degli arti inferiori è simile a quella
di pendoli, l‟oscillazione posteriore è prevenuta dal contatto del
piede.
• durante la fase di appoggio, l‟arto inferiore può essere
considerato come un “pendolo invertito” (con fulcro a livello del
centro di rotazione della caviglia), anche in questo caso si
assiste ad un‟interconversione tra energia cinetica e potenziale.
55
Un pendolo“invertito”
Il pendolo
“rimbalza”
indietro ed
avanti usando
le molle
56
57
Azione a pendolo“invertito” durante
la fase di appoggio
• durante la fase di stance, l‟arto inferiore può essere considerato un
“pendolo invertito”.
• Il momento in avanti del corpo dà la velocità iniziale di rotazione
angolare (prendendo il posto della molla della figura precedente).
• Anche l‟azione a pendolo “invertito” determina l‟inter-conversione
di energia potenziale e cinetica, ma in questo caso (diversamente
dal pendolo convenzionale) KE è minima sull‟asse di mezzeria
mentre PE è massima.
• quando raggiunge il termine della sua “oscillazione invertita”
facendo fulcro sull‟appoggio l‟arto inferiore non oscilla indietro,
come farebbe un pendolo invertito reale, perché il piede è
sollevato dal terreno ed il fulcro di oscillazione si trasferisce dal
piede all‟anca, consentendo all‟arto inferiore di oscillare ancora
come un pendolo convenzionale.
58
59
Il cammino
modellizzato come
un limone che rotola
Il modello del pendolo serve a
comprendere l‟ efficienza energetica
concentrandosi sull‟azione dei singoli
arti inferiori.
in realtà è necessario considerare la
spesa energetica a livello dell‟intero
corpo
Il modello più semplice è
rappresentato da un‟ellisse che rotola
il cui centro rappresenta il CoM del
corpo
60
Il cammino modellizzato come un limone
che rotola:
fase centrale dell‟appoggio
Nel punto intermedio dell‟appoggio
di ciascun arto inferiore il CoM
corpo è al suo punto più alto
(anche nella deambulazione
energeticamente migliore).
pertanto la PE del corpo è
relativamente alta e la KE (velocità
del movimento in avanti) è
relativamente bassa
61
Il cammino modellizzato come un limone che
rotola:
fase iniziale/finale dell‟appoggio
Verso l‟inizio o la fine
dell‟appoggio di ciascun arto
inferiore il CoM del corpo è al
suo punto più basso
pertanto la PE del corpo è
ridotta e la KE (velocità del
è
relativamente alta
movimento in avanti)
62
La fase di doppio appoggio si accorcia all’aumentare della velocità di deambulazione
63
La corsa
• La principale differenza qualitativa tra cammino e
corsa è la fase di volo (cioè il periodo di non
appoggio) e l‟assenza di un periodo di doppio
appoggio.
• Un‟ importante differenza quantitativa della corsa
rispetto al cammino è che il piede colpisce il terreno
meno in avanti rispetto al centro of gravità (cioè
quando corriamo, l‟arto inferiore che oscilla in avanti
al momento del contatto del piede è proteso meno
oltre il tronco)
• questa caratteristica è tanto più pronunciata quanto
più veloce è la corsa.
64
Le due differenze precedenti determinano
alcune conseguenze :
• Quando si corre, il momento del corpo grava su un solo
piede di appoggio, dato che l‟altro piede non è in contatto
col terreno.
• La posizione relativa dell‟appoggio calcaneare, rispetto al
CoM, è facilitante perché impedisce al CoM di
abbassarsi troppo al momento dell‟impatto.
• La posizione dell‟appoggio calcaneare rispetto al CoM
riduce anche l‟ „effetto frenante ‟ della GRF durante la
prima parte della fase di stance
65
Eventi e fasi che caratterizzano il cammino e la corsa
Durante la transizione da cammino a corsa,
• Il periodo di doppio appoggio scompare
•La maggior parte del tempo del passo è spesa nella fase di oscillazione
Attività
Cammino lento
% di tempo in
appoggio
60
volo
40
Cammino veloce
Corsa
50
30
50
70
Scatto
20
80
66
Eventi e fasi che caratterizzano il cammino e la corsa
67
Lunghezza e frequenza della falcata
•
•
•
quando aumenta la velocità della
corsa aumentano sia la frequenza
che la lunghezza della falcata.
inizialmente, a velocità
relativamente basse, l‟incremento
della lunghezza è
proporzionalmente maggiore di
quello della frequenza
vicino alla velocità massima la
frequenza si incrementa più della
lunghezza
In termini di efficienza energetica è più conveniente incrementare la velocità allungando
i passi piuttosto che facendoli più frequentemente:
la frequenza infatti aumenta quando si è vicini ai limiti di vincolo meccanico
68
Diagramma “a farfalla” della forza di reazione al terreno
(GRF) durante la corsa
69
Distribuzione della spinta sul terreno con diversi appoggi
70
Differenze tra cammino e corsa: GRF
•
Il picco di „contatto‟
iniziale è
proporzionalmente
inferiore ed è meno
angolato indietro
(meno effetto
frenante)
•
•
Il picco di „spinta‟ finale
è maggiore (per
proiettare il corpo nella
fase di volo, per
raggiungere velocità
maggiori etc.)
La durata della fase di
contatto è più breve
71
ALTRI ASPETTI: “CPG”(Central Pattern Generator)
FLESSIONE
GENERATORE
DI RITMO
ESTENSIONE
•Ci sono più di 50 CPG per la regolazione di attività
ritmiche (locomozione, respirazione, nutrizione etc.)
•Il generatore di segnali ritmici è midollare ed agisce
mediante mutua inibizione
•È modulato da informazioni propriocettive
“CPG”
SEGNALI
DISCENDENTI
RETE DI
“PATTERING”
MOTONEURONI
SEGNALI
ASCENDENTI
SEGNALI EFFERENTI:
• Inizio /Fine :
corteccia motoria z tronco cerebrale z tratto
reticolo spinale
• Regolazione fine del passo:
corteccia motoria z tratto cortico spinale
• Regolazione fine del ritmo:
v. cerebello z vestibulozspinale,
v. cerebello z rubro z spinale,
v. cerebello z reticolo z spinale
MUSCOLI
72
73
ALTRI ASPETTI: la prospettiva robotica
Processi computazionali che
sottostanno al controllo motorio
TRAETTORIA
DESIDERATA
PIANIFICAZIONE
MOTORIA
Coordinate
spaziali
FORMAZIONE
TRAETTORIA
Coordinate
spaziali
TRAETTORIA
REALE
CINEMATICA
INVERSA
Trasformazione
Coordinate
DINAMICA
INVERSA
Coordinate
Articolari
ATTUATORI
Coordinate
Attuatori
CARICO
74
75
Differenze tra cammino e corsa: Utilizzo di energia
• L‟utilizzo di energia tra corsa e cammino è
fondamentalmente diverso
• Nella corsa sia l‟energia cinetica e sia l‟energia
potenziale sono massime durante la fase di volo
• L‟immagazzinamento di energia nei tessuti elastici
all‟inizio della fase di appoggio ha un ruolo più
prominente nella corsa.
• L‟immagazzinamento di energia elastica durante il
cammino è inferiore
76
Energia durante la corsa: il modello a palla rimbalzante
Diversamente dal
modello del cammino
(limone che rotola)
sia KE che PE sono
elevate all‟apice del
“rimbalzo” (equivalente
alla metà della fase di
volo)
durante il contatto con il
terreno, KE e PE sono
basse e l‟energia è
immagazzinata nei
tessuti elastici.
Pertanto nella corsa si devono
considerare le interconversioni tra
TRE differenti forme di energia:
PE, KE e elastica
77
Differenze tra cammino e corsa: costi energetici
78
Immagazzinamento di energia elastica durante la
progressione
•
Totale dissipazione energia cinetica all‟impatto= 100 J/passo (soggetto
di 70 kg; 4.5. m s-1)
•
All‟inizio della fase di appoggio, l‟energia elastica è immagazzinata in:
– tendine Achille
~35J
– tendine rotuleo
~20J
– Arco plantare
~17J
TOTAL
~72J
• In tal modo circa ¾ dell‟energia cinetica energia che si
perderebbe al contato calcaneare è immagazzinata nei
legamenti e nei tendini, per essere riconvertita in energia cinetica
durante gli ultimi istanti della fase di appoggio
• Grazie a questo immagazzinamento di energia elastica i muscoli
riducono la loro necessità di contrazione sia come tempo che
come intensità risparmiando l‟energia metabolica disponibile
(soprattutto in ATP)
79
Proprietà elastiche dei tendini
• I tendini possono stirarsi sino all‟ 8% della loro
lunghezza iniziale recuperandola elasticamente
• >93% dell‟energia immagazzinata è recuperata
• Sia il tendine rotuleo che quello achilleo sono
relativamente lunghi e sottili pertanto entrambi
possono flettersi significativamente mentre
immagazzinano energia
80
Forza elastica e tendine di Achille: dati sperimentali
• Maratoneta (2h 37 min)
• picco di forza sul metatarso = 2.7×Peso Corporeo (=1900 N)
• picco forza sul t. di Achille = 4700 N
• Minima sezione trasversa del tendine = 90mm2
• forza per unità di sezione trasversa = 50 N mm-2
• Conseguente stiramento del tendine attorno al 6%
• Carico di rottura del tendine =100 N mm-2
• Margine di sicurezza è circa del 100% cioè il tendine è
sottoposto ad una tensione pari alla metà del carico di
rottura
81
Scarpe da corsa ed immagazzinamento di
energia elastica
• Il tallone delle scarpe da corsa assorbe un massimo
di ca. 7J e ne restituisce meno del 66%
• Pertanto le scarpe contribuiscono poco all‟economia
di energia
• Il quantitativo di energia elastica che può essere
immagazzinato dalle scarpe è limitato dalla necessità
di avere stabilità laterale
82
Anatomia di una scarpa sportiva
collo
tessuto
protezione
achillea
imbottiture
puntale
conchiglia
calcaneare
spessore
calcaneare
soletta
suola esterna
interna rivestimento suola
arco plantare
intermedia a
interno
doppia densità
83
Movimenti di varie
articolazioni durante il ciclo
della deambulazione e attività
muscolare associata
84
Sistema optoelettronico per la rilevazione del
movimento
85
Sistema optoelettronico per la rilevazione del
movimento
86
Sistema optoelettronico per la rilevazione del
movimento
87
88
89
90
PRINCIPALE ATTIVITÀ MUSCOLARE DURANTE IL CICLO DEL PASSO
AZIONE MUSCOLARE
MUSCOLI
PERIODO
Ammortizzazione
Quadricipite
Dorsiflessori
Carico del peso
Stabilizzazione
Grande,medio,piccolo gluteo
Tensore Fascia Lata
Erettore della colonna
Doppio appoggio
Sollevamento del piede
Flessore lungo delle dita
Flessore lungo del 1°dito
Gastrocnemio
Peronei Lungo e breve
Soleo
Tibiale Posteriore
Scarico del peso
Acceleratori
Adduttori lungo e grande
Iliopsoas
Sartorio
Scarico del peso
Controllori del piede
Estensore lungo delle dita
Estensore lungo del 1°dito
Tibiale Anteriore
Fase di volo
Deceleratori
Gracile
Semimembranoso
Semitendinoso
Bicipite femorale
Dalla fase intermedia di volo
al contatto iniziale
91
Tipo di contrazione muscolare in fase di appoggio ed oscillazione
.
92
Fase di oscillazione : colonna e pelvi
movimenti:
• Rotazione della pelvi verso l‟arto inferiore in appoggio (cioè l‟arto
non in appoggio va in avanti);
• Basculamento laterale della pelvi verso l‟arto inferiore non in
appoggio
• movimenti delle articolazioni vertebrali allo scopo di contrastare
le conseguenze dei movimenti pelvici sottostanti :
– La parte superiore della colonna ruota in senso opposto alla
rotazione pelvica
– La colonna lombare si inclina in senso opposto al basculamento
pelvico
• I movimenti della colonna impediscono ai movimenti pelvici di
determinare la rotazione e la flessione di tutta la parte superiore
del corpo .
93
Fase di oscillazione : anca
• La flessione è il movimento principale.
• La massima flessione di anca è raggiunta circa a metà della
fase di oscillazione.
• La rotazione e l‟ad/abduzione dell‟anca sono necessarie per far
si che l‟arto inferiore che oscilla continui a puntare verso l'avanti,
nonostante la rotazione pelvica.
• Il ms. Ileopsoas è il motore principale ma è attivo solo nelle
prime fasi del movimento
• La fase di oscillazione è pertanto solo parzialmente un
movimento ballistico
• Nella fase iniziale dell‟oscillazione contribuiscono al movimento
anche la gravità e l‟energia immagazzinata nei legamenti stirati
dell‟anca.
94
La massima flessione di anca è raggiunta circa a
metà della fase di oscillazione
95
Angolo di flesso estensione dell‟anca
Massima flessione
all‟85% del ciclo
Estensione per
tutto l‟ appoggio
Estende prima della
fase di appoggio
estensione
50
40
20
10
0
flessione
gradi
30
-10
-20
-30
20
40
60
80
100
Ciclo del passo in %
96
Fase di oscillazione : ginocchio
• Prima si flette per permettere l‟esposizione del terreno
necessario all‟appoggio in collegamento al basculamento
pelvico
• Poi si estende per preparare l‟impatto calcaneare
• L'attività muscolare durante l‟oscillazione è scarsa. I
movimenti del ginocchio sono conseguenze passive della
flessione dell’anca. (azione a doppio pendolo articolato
dell‟arto inferiore)
• Alla fine l‟attivazione dei flessori del ginocchio arresta l‟
estensione (azione eccentrica). La contrazione del
quadricipite anticipa l‟appoggio calcaneare (azione
isometrica, effetto stabilizzante)
97
Movimenti del ginocchio durante la fase di oscillazione :
flessione inizialmente, e poi estensione
98
Angolo di flesso estensione del ginocchio
Estensione fino a
massima estensione
dell‟anca
Modesta
flessione da
appoggio
70
Massima flessione
nella prima fase di
oscillazione
60
estensione
40
30
20
flessione
gradi
50
10
0
-10
20
40
60
80
100
Ciclo del passo in %
99
Fase di oscillazione : caviglia e piede
Movimenti:
• Dorsiflessione (esposizione del terreno per l‟appoggio e
meccanica della caviglia)
Azione muscolare del Tibiale anteriore :
• All‟inizio dell‟oscillazione si contrae (terreno esposizione del
terreno per l‟appoggio in relazione al basculamento pelvico)
• L‟attività si spegne a metà della fase di volo
• Si contrae ancora poco prima del contatto calcaneare
(prevenzione della caduta del piede e stabilizzazione
dell‟appoggio calcaneare).
100
Fase di oscillazione : dorsi flessione della caviglia
101
Principali eventi durante la fase di appoggio
2. appiattimento del piede
(seguito dal distacco del 1° dito controlaterale)
3. sollevamento del calcagno
1. appoggio calcaneare
(seguito dall‟appoggio calcaneare controlaterale)
4. distacco del 1° dito
102
Angolo di flesso estensione della caviglia
Dorsiflessione al
termine della
oscillazione in vista
dell‟impatto
calcaneare
Veloce flessione
plantare al distacco
del calcagno
Dorsiflessione
(estensione)
Dorsiflessione
da pianta in
appoggio
40
30
10
0
Flessione
Plantare
gradi
20
-10
-20
-30
-40
20
40
60
80
100
Ciclo del passo in %
103
Fase di appoggio : anca
• Il principale movimento è di estensione partendo da
una posizione flessa
• La rotazione e l‟adduzione/abduzione di anca mediano
movimenti pelvici richiesti nelle fasi iniziali del cammino
• I ms. Glutei e i Flessori del ginocchio, attivi durante la
fase iniziale, interrompono la loro attività a metà
dell‟appoggio e subentra la gravità.
• durante la fase di singolo appoggio, il medio gluteo ed il
tensore della fascia lata (abduttori dell‟anca) lavorano
isometricamente ed eccentricamente per mantenere la
stabilità pelvica.
104
Fase di appoggio :
da una posizione flessa l‟anca si estende
105
Fase di appoggio : ginocchio
• Lieve flessione dall‟impatto del calcagno sino alla mezzeria
• Poi estensione dopo la mezzeria sino al sollevamento del calcagno
• Il Quadricipite si attiva (eccentricamente) durante la fase precoce
con effetto stabilizzante poiché la linea di azione della GRF passa
dietro l‟articolazione del ginocchio
• questa azione immagazzina energia che è restituita durante la
successiva attività concentrica
• Una volta che l‟arto inferiore ha passato la posizione verticale
(mezzeria), il ginocchio si blocca (cioè non sono più necessari gli
estensori).
• I flessori del ginocchio si attivano all‟inizio ed alla fine della fase di
appoggio (iniziando la flessione rispettivamente durante l‟appoggio
e l‟oscillazione).
106
Fase di appoggio : ginocchio
leggera flessione seguita da estensione
107
Fase di appoggio : caviglia
• Inizialmente (all‟appoggio calcaneare) vicino alla
posizione neutra
• La flessione plantare produce appiattimento del piede
• Poi lieve dorsiflessione mentre l‟arto inferiore e il
corpo soprastanti oscillano in avanti.
• Previene l‟ulteriore dorsiflessione che il peso del
corpo tende a causare.
• Flessione Plantare alla fine della fase propulsiva
108
Fase di appoggio : caviglia
posizione neutra
all‟appoggio calcaneare
dorsiflessione all‟
oscillazione anteriore
appiattimento del piede
flessione plantare alla fine
della fase propulsiva
109
Fase di appoggio : azione dei muscoli sulla caviglia
• Tibiale anteriore all‟appoggio calcaneare (previene la caduta del
piede)
• Gastrocnemio e soleo dalla mezzeria al sollevamento del primo
dito
• L‟attività del tricipite surale, assieme a quella degli estensori
dell‟anca, genera la forza propulsiva necessaria per mantenere il
movimento in avanti :
– L‟attività iniziale è eccentrica: i muscoli si attivano mentre la caviglia
è ancora dorsiflessa.
– In seguito l‟azione è concentrica durante la flessione plantare della
caviglia
– Questa azione “bifasica” genera un ciclo stiramento/accorciamento
in grado di generare contrazioni rapide e potenti
110
corsa: differenze e somiglianze col
cammino
• I movimenti sono in generale simili a quelli del
cammino, ma
– Escursioni articolari di solito maggiori
– Differente coordinazione tra gli arti inferiori è (ad es.: non vi
è la fase di doppio appoggio).
– Maggior impegno muscolare perché la velocità riveste più
importanza dell‟economia di energia
111
corsa: fase di oscillazione
• Il moto dell‟anca dipende più dall‟azione muscolare
che dal meccanismo pendolare
• La flessione del ginocchio e la dorsiflessione della,
caviglia, portano il CoM dell‟arto inferiore più vicino
all‟anca. Ciò riduce il momento di inerzia e aumenta
la velocità angolare.
• I movimenti del ginocchio sono largamente passivi
(non dovuti all'attività muscolare), e risultano dal
trasferimento del momento dalla coscia.
• In dipendenza dalla velocità della corsa, il contatto
iniziale con il terreno può avvenire con il calcagno,
l‟intero piede, o il metatarso
112
corsa: fase di appoggio
• anca: leggera flessione seguita da estensione. La
contrazione iniziale del grande gluteo è di tipo
eccentrico
• ginocchio: grado di flessione aumenta con velocità;
quello dell‟ estensione decresce. La contrazione
iniziale del quadricipite al ginocchio è di tipo
eccentrico
• caviglia : dorsiflessione seguita da flessione
plantare. Il gastrocnemio ed il soleo durante l‟intera
fase ma soprattutto verso la fine.
• L‟immagazzinamento di energia da
accorciamento/allungamento avviene in tutte e
tre le articolazioni
113
114
115
Importanza dell’impatto calcaneare nella dinamica del cammino
116
Man mano che la velocità di traslazione aumenta, il movimento del COM nel cammino
adulto normale diminuisce in direzione mediolaterale ed aumenta in direzione verticale.
Ridurre la velocità di traslazione può richiedere un significativo aumento della risposta
di bilanciamento a causa della maggior dislocazione del COM
Escursioni verticali del COM che sarebbero evidenti a velocità normale potrebbero
essere mascherate a velocità ridotta .
Nell’analisi dei movimenti del COM bisogna sempre tener conto della velocità di marcia
e degli spostamenti mediolaterali
117
118
119
120
121
122
123
Il piede nella fase di appoggio
Zone sottoposte
a carico nelle
varie fasi di
appoggio
podalico
124
piede di appoggio e piede di spinta
Piede astragalico: astragalo,
scafoide, cuneiformi, I-II-III
metatarso; articolato con la
gamba è il piede di “spinta”
Piede calcaneare: calcagno, cuboide,
IV-V metatarso; non è articolato con
la gamba, è il piede statico o di
equilibrio
125
piede di appoggio e piede di spinta
Permette il movimento del
piede durante il cammino e
la proiezione del corpo nello
spazio
Triangolo
statico
Assicura la posizione eretta
Triangolo
dinamico o
propulsivo
Cerniera
metatarso
falangea
126
Il piede come ammortizzatore di impatto
TESSUTI MOLLI PERI CALCANEARI
Tendine di achille
Borse sierose
Tessuto adiposo
Aponeurosi plantare
127
Il piede come ammortizzatore di impatto
Suola venosa plantare di Lejars (ammortizzatore idraulico)
128
Il piede come ammortizzatore di impatto
Archi plantari
(ammortizzatori a balestra)
Arco
longitudinale
mediale
(interno)
Arco
longitudinale
laterale
(esterno)
Arco trasverso o
anteriore
129
Il piede come ammortizzatore di impatto
Muscoli estensori
e flessori plantari
come regolatori di
rigidità
c
b
a
d
e
130
131
132
133
Integrando il tutto:
134
135