Capitolo 2 - Modelli di sistemi: processi stocastici
I processi stocastici costituiscono una classe di modelli di sistemi che permette lo
studio e l’analisi dei sistemi. In questo capitolo introduciamo i processi stocastici
Markoviani per la loro applicazione all’analisi delle prestazioni di sistemi. In
particolare, richiamiamo brevemente la definizione e classificazione dei processi
stocastici che costituiscono la base dei modelli di sistemi che tratteremo in seguito.
2.1 Processi stocastici
Un processo stocastico (p.s.) è definito come una famiglia di variabili casuali X =
{X(t) | t∈T} definite su uno spazio di probabilità Ω, ed indiciate dal parametro t, dove
t varia in un insieme indice T.
L’indice t è usualmente detto tempo. Ogni variabile casuale (v.c.) X(t) assume
valori, detti stati della v.c., in un insieme E detto spazio degli stati del processo
stocastico. Poiché ogni v.c. è definita come una funzione da uno spazio campione S
all’insieme dei reali, un processo stocastico è un insieme di funzioni {X(t,s) | t∈T,
s∈S}. Fissato un particolare valore dell’indice t=t0 la funzione X(t 0,s), che indichiamo
con X(t0), è una v.c. sullo spazio campione S. Fissato un particolare punto dello spazio
s0∈S la funzione X(t,s 0) è una realizzazione del processo stocastico. Al variare di s e t
si ha una famiglia di v.c., ovvero il processo stocastico.
I processi stocastici possono essere classificati in base alle seguenti caratteristiche:
• spazio degli stati E
• indice tempo
• tipo di dipendenza stocastica fra le v.c..
• Lo spazio degli stati E può essere discreto o continuo. Nel primo caso il processo
stocastico a spazio discreto è anche detto catena e lo spazio E è spesso indicato come
l’insieme degli interi non negativi. Nel secondo caso l’insieme dei valori assunti dalle
v.c. non è finito o numerabile e il processo stocastico è a spazio continuo.
• L’indice tempo a sua volta può essere discreto o continuo. Un processo stocastico a
tempo discreto è anche detto sequenza stocastica ed è denotato come {Xn | n ∈ T }
dove l’insieme T è finito o numerabile. In questo caso i cambiamenti di stato si
osservano soltanto a determinati istanti, finiti o numerabili. Al contrario, se i
cambiamenti di stato avvengono in un qualsiasi istante in un insieme finito o infinito
di intervalli reali, allora si ha un processo a tempo continuo, denotato come {X(t) |
t∈T}.
S. Balsamo
- 21 -
Esempio. Il numero di pazienti ricoverati in un ospedale in funzione del
tempo, osservati alle ore 8 di ogni giorno, è un processo stocastico, in cui lo
spazio degli stati E è discreto (un sottoinsieme finito dei naturali) e il tempo
è discreto. La temperatura misurata in una stanza in funzione del tempo,
osservata ad ogni istante, è un processo stocastico, con spazio degli stati E
continuo e tempo continuo.
Esempio. Consideriamo un sistema di elaborazione rappresentato come una
singola risorsa a cui arrivano dall’esterno job a tempi casuali e che, dopo un
possibile tempo di attesa, vengono elaborati ed infine lasciano il sistema. Se
indichiamo con N k il numero di job presenti nel sistema all’istante di arrivo
del k-simo job al sistema, allora {Nk | k=1,2,...} è un p.s. a spazio discreto
E=N={0,1,2,...} e tempo discreto T={1,2,...}. Se invece consideriamo il
numero X(t) di job presenti nel sistema al tempo t, il p.s. {X(t) | t ∈ T } è a
spazio discreto E=N e tempo continuo T=R 0+={t | 0 ≤t≤ ∞ }. Infine se
indichiamo con W k il tempo di attesa del k-simo job nel sistema prima di
ricevere servizio e con Y(t) il tempo di servizio cumulativo di tutti i job
presenti nel sistema al tempo t, allora il p.s. {W k | k=1,2,...} è a spazio
continuo E=R0+ e a tempo discreto T={1,2,...}, mentre il p.s. {Y(t) | t ∈ T }
è sia a spazio continuo E=R 0+ che tempo continuo T=R 0+.
• La dipendenza stocastica fra variabili casuali X(t) per diversi valori di t (o X n per
diversi valori di n, nel caso di tempo discreto) caratterizza un processo stocastico e
talora semplifica la sua descrizione. La funzione che descrive le dipendenze
stocastiche fra le v.c. di un p.s. è la funzione di distribuzione di probabilità congiunta
per le v.c. X=[X(t1),X(t2),...,X(tn)], denotata come
FX (x;t) = Prob{ X(t1)≤x 1 ; X(t2)≤x 2 ;...; X(tn)≤x n}
al variare di n e di x=[x 1,x2,...,xn] e t=[t1,t2,...,tn], con xi∈E, t i∈T, 1≤i≤n, n≥1, e
t1<t2<...<tn. La descrizione completa di un processo in termini di funzione di
distribuzione congiunta è data da FX (x;t), ∀x, ∀t, ∀n. Per molti processi di interesse
pratico, sfruttando particolari proprietà è però possibile definire una descrizione del
processo molto più semplice.
Introduciamo ora una classificazione dei processi stocastici in base al tipo di
dipendenza stocastica fra le v.c. che lo compongono.
Un processo stocastico è stazionario in senso stretto se la funzione di
distribuzione F X (x;t) è invariante rispetto ad uno spostamento sull’asse del tempo T,
ovvero se per ogni costante t
FX (x;t+τ) =FX (x;t)
dove t+τ=[t1+τ,t2+τ,...,tn+τ], e per ogni x, t ed n.
S. Balsamo
- 22 -
Un processo stocastico è stazionario in senso largo se i primi due momenti della
distribuzione sono indipendenti dalla posizione sull’asse T, ovvero se la media E[X(t)]
e la varianza Var[X(t)] sono costanti rispetto al tempo t∈T e se E[X(t1), X(t2)]
dipende solo da |t1-t2| e non dai singoli valori t1, t2∈T. In tal caso la funzione di
autocovarianza Cov[X(t1),X(t2)]=E[(X(t1)-E[X(t1)]) (X(t2)-E[Xt2)])] può essere
espressa come funzione della sola differenza |t1-t2| ed è una funzione pari.
Un processo stocastico è indipendente se la funzione di distribuzione congiunta è
fattorizzabile nelle singole funzioni di distribuzione marginali:
n
FX ( x ; t ) =
n
∏ F X (x ; t ) =∏ Prob{X(t ) ≤ x }
i=1
i
i
i
i
i
i=1
Un processo stocastico a tempo discreto {X n | n=1,2,...} è di rinnovamento se le
v.c. X1, X2,... sono indipendenti, identicamente distribuite (i.i.d.) e a valori non
negativi. In altre parole, un processo stocastico di rinnovamento si ripete
probabilisticamente, ovvero è possibile identificare una sequenza di punti detti di
rigenerazione, a partire dai quali il processo si comporta, in termini probabilistici,
sempre nello stesso modo. Il tempo fra due punti di rigenerazione è detto ciclo di
rigenerazione.
Un processo stocastico a tempo discreto {X n | n ∈ T } è di Markov se la
probabilità di stato al tempo n+1 dipende soltanto dallo stato al tempo attuale, n, e non
dalla storia precedente, ovvero se per ogni n>0 e per ogni valore degli stati j, i0, i 1,...,
in ∈ E si ha:
Prob {Xn+1 = j | X0 = i0 ; X1 = i1 ;...; Xn = in} = Prob {X n+1 = j | Xn = in}
(2.1).
In un processo stocastico Markoviano la dipendenza stocastica fra le variabili casuali è
quindi limitata nel tempo ad un passo. Lo stato corrente raccoglie in sè tutta la storia
passata.
Un p.s. a tempo continuo {X(t) | t ∈ T } è di Markov se per ogni sequenza di valori
t0<t1<...<tn<t la distribuzione di probabilità di X(t) condizionata a X(t 0), X(t1),...,
X(tn) dipende soltanto dallo stato X(tn), per ogni n>0 e per ogni valore degli stati j, i 0,
i1,..., in ∈ E:
Prob {X(t)=j | X(t0) = i0; X(t1) = i1;...;X(tn) = in} = Prob {X(t)=j | X(t n) = in}
(2.2).
Dalla definizione di processo Markoviano si può ricavare un vincolo sulla
distribuzione del tempo di permanenza in uno stato: per un processo di Markov a
S. Balsamo
- 23 -
tempo discreto il tempo di permanenza in uno stato è un v.c. geometrica, mentre per
un processo di Markov a tempo continuo è un v.c. esponenziale. Questo vincolo deriva
dalla proprietà di assenza di memoria indotta sulla v.c. dal processo Markoviano.
Come è noto le uniche distribuzioni che godono della proprietà di assenza di memoria
sono, rispettivamente, la geometrica fra le distribuzioni discrete e l’esponenziale fra le
continue.
Se si assume che la distribuzione di probabilità di permanenza in uno stato non sia
geometrica (per tempo discreto) o esponenziale (per tempo continuo), ma generale,
allora si ha un processo stocastico di semi-Markov. In questo caso le transizioni fra
stati del processo avvengono ad istanti di tempo distribuiti arbitrariamente. Se
consideriamo il p.s. ai soli istanti in cui avvengono le transizioni fra stati, allora
ritroviamo un p.s. di Markov, detto immerso (embedded).
Un p.s. di Markov a spazio discreto E è anche detta catena di Markov.
Una catena di Markov è di nascita-morte (birth-death) se le uniche transizioni
possibili che il processo può effettuare sono soltanto fra stati vicini. Indicando lo
spazio degli stati E come l’insieme di numeri naturali, nel caso di tempo discreto, se lo
stato X n=i allora lo stato al tempo successivo può soltanto essere Xn+1∈{i-1, i, i+1},
∀i∈E. La particolare struttura di tali processi rende particolarmente semplice la loro
analisi.
Un random walk è un processo stocastico {Xn | n=1,2,...} che può essere pensato
come la rappresentazione del movimento di una particella nello spazio,
identificandone la sua posizione al tempo n, n>0. Tale posizione dipende dalla
posizione precedente e da una v.c. indipendente dallo stato del processo e con
distribuzione arbitraria. Formalmente un p.s. random walk è definito come {Xn | n≥0}
con X0=0 e
Xn= Y1+ Y2+ ... + Yn
n>0
e dove Y i, i>0, è una sequenza di v.c. indipendenti e con identica distribuzione (i.i.d.).
Il p.s. random walk è discreto (o continuo) se le v.c.Yi, i>0, sono discrete (o continue).
In un p.s. random walk discreto la probabilità di transizione fra due stati i e j dipende
soltanto dalla loro differenza (j-i). Ad esempio il numero di teste osservate in una
sequenza indipendente di lanci di moneta è un p.s. random walk discreto.
2.2 Processo di Poisson
Il processo stocastico di Poisson riveste un ruolo fondamentale nella definizione e
soluzione di modelli stocastici. Esso può essere definito in diversi modi equivalenti.
Indichiamo con N(t), t≥0, il numero di eventi osservati in un intervallo di tempo [0,t].
S. Balsamo
- 24 -
SISTEMA
arrivi
partenze
Fig. 2.1 - Sistema aperto Ad esempio, consideriamo un sistema aperto, rappresentato in Fig. 2.1, a cui arrivano
dall’esterno dei job (o utenti) i quali, dopo aver speso un certo tempo nel sistema, lo
lasciano. Rappresentiamo l’evoluzione nel tempo di tale sistema con la v.c. N(t) che
indica il numero di arrivi osservati al sistema nell’intervallo [0,t]. Tale processo è
anche detto processo d’arrivo. Inoltre sia Xi la v.c. che indica il tempo che intercorre
fra l’arrivo dell’(i-1)-esimo job e l’arrivo dell’i-esimo job al sistema, per i>1, mentre
X1 indica il tempo di arrivo del primo job. Se le v.c. Xi, i>0, sono i.i.d., allora il
processo stocastico {N(t) | t≥0} è di rinnovamento.
Inoltre se le v.c. Xi, i>0, sono i.i.d. con distribuzione esponenziale di parametro λ,
allora il processo stocastico {N(t) | t≥0} è di Poisson.
Il parametro λ rappresenta il tasso di arrivo al sistema. Il processo è omogeneo se
λ non varia nel tempo. La v.c. N(t) ha quindi distribuzione di probabilità di Poisson
con parametro λt , ovvero :
Prob { N(t) = i } = e
-λ t
(λt)
i!
i
i ≥0
E[N(t)] = Var[N(t)] = λt
(2.3).
In modo equivalente il processo di Poisson può essere definito come il p.s. {N(t),
t≥0} che indica il numero di eventi osservati in un intervallo di tempo [0,t], per cui
N(0)=0, e che soddisfa le seguenti condizioni:
1) il numero di eventi in intervalli disgiunti sono stocasticamente indipendenti;
2) il numero di eventi in un intervallo di tempo dipende solo dalla sua lunghezza e
non dall’istante iniziale;
3) per un valore sufficientemente piccolo di t e per una costante positiva λ si ha:
Prob { un evento in un intervallo di ampiezza t } = λt + o(t)
Prob { nessun evento in un intervallo di ampiezza t } = o(t)
Prob { più di un evento in un intervallo di ampiezza t } = o(t)
dove o(t) è una funzione di ordine inferiore a t , ovvero lim t→∞ [o(t)/t] = 0.
Si può dimostrare che il processo di Poisson è l’unico che soddisfa le condizioni 1-2-3
[FEL 66, KLE 75, TRI 82]. Dalla proprietà 2 deriva che
S. Balsamo
- 25 -
-λ t
Prob { k eventi nell'intervallo (s,s+t) } = e
k
(λt)
k!
k>0
Nel caso di processo di Poisson come processo di arrivo al sistema di Fig. 2.1, l’evento
considerato è l’arrivo al sistema di un job. In questo caso se il tempo di interarrivo è
esponenziale allora il processo di arrivo è di Poisson. Viceversa, se il processo di
arrivo è di Poisson allora il tempo di interarrivo è necessariamente esponenziale.
Infatti, se indichiamo con X la v.c. tempo di interarrivo con distribuzione cumulativa
A(t)=Prob{X≤t} allora possiamo scrivere, per la proprietà 2, che
A(t) = 1-Prob{N(t)=0 } = 1- e-λt , t>0
ovvero esponenziale di parametro λ. Quindi il tempo di interarrivo di un processo di
arrivo di Poisson è esponenziale.
Il processo di Poisson è spesso utilizzato per definire modelli di sistemi fisici e
organici, oltre che di sistemi di calcolo e di comunicazione. Tale applicazione dipende
anche alla seguente proprietà di tale processo: la somma di un grande numero di
processi di rinnovamento indipendenti e stazionari, ognuna con distribuzione del
tempo di rinnovamento arbitraria, tende ad un processo di Poisson. Questo importante
risultato permette di approssimare processi naturali e artificiali formati da un elevato
numero di individui o componenti, con un processo di Poisson.
Il processo di Poisson gode inoltre delle seguenti proprietà che riguardano la
composizione e la decomposizione di processi.
Composizione di processi di Poisson. La sovrapposizione o composizione di n
processi di Poisson indipendenti rispettivamente di parametro λ 1, λ2 , ..., λ n è
anch’esso un processo di Poisson di parametro λ 1+λ 2 +…+λ n.
Esempio. Ad un sistema di elaborazione provengono due flussi di arrivo di
programmi rappresentabili con due processi di Poisson indipendenti,
rispettivamente di parametro, ovvero con tasso di arrivo, λ1 e λ2. Il
processo di arrivo complessivo è anch’esso di Poisson e il tasso totale di
arrivo è λ 1+λ 2.
Decomposizione di processi di Poisson. Dato un processo di Poisson {N(t) | t≥0} di
parametro λ, assumiamo che sia decomposto in n processi, selezionando ogni uscita
del processo secondo una distribuzione di probabilità di Bernoulli ad n uscite, con
S. Balsamo
- 26 -
probabilità pi, 1≤i≤n. Allora gli n processi di uscita {Ni(t) | t≥0} sono indipendenti e
sono anch’essi processi di Poisson rispettivamente con parametro λpi, 1≤i≤n.
Esempio. Supponiamo che il numero di transazioni in arrivo ad un sistema
di basi di dati sia rappresentabile da un processo di Poisson di parametro λ.
Assumiamo che il sistema sia composto da n archivi e che ogni transazione
in arrivo richieda l’archivio i con probabilità pi, 1≤i≤n. Sotto l’ipotesi di
indipendenza fra le transazioni anche il processo di arrivo al singolo
archivio i è un processo di Poisson di parametro λp i, 1≤i≤n.
2.3 Processi di Markov
Introduciamo la classe di processi stocastici di Markov considerando lo spazio degli
stati discreto (e quindi catene di Markov) ed il tempo discreto o continuo nelle due
seguenti sezioni.
2.3.1 Catene di Markov a tempo discreto
Abbiamo definito un processo stocastico a tempo discreto {Xn | n ∈ T} di Markov
se la probabilità di stato al tempo n+1 dipende soltanto dallo stato corrente, n, e non
dall’evoluzione precedente del processo, come espresso dalla formula (2.1).
Assumiamo, senza perdita di generalità, che T sia l’insieme dei naturali N. Se anche lo
spazio degli stati E è discreto allora {Xn | n ∈N} è una catena di Markov a tempo
discreto, e Xn=j indica che il processo si trova nello stato j al tempo n, n∈N, j∈E.
Nella formula (2.1) la probabilità condizionata al membro destro
Prob {Xn+1 = j | Xn = i}
è detta probabilità di transizione al tempo n dallo stato i allo stato j, i,j∈E, n≥0.
Una catena di Markov si dice omogenea se le probabilità di transizione sono
indipendenti dal tempo n. Si definisce la probabilità di transizione dallo stato i allo
stato j come:
pij = Prob {Xn+1 = j | Xn= i}
(2.4)
∀i,j∈E, ∀n≥0. Tali probabilità costituiscono gli elementi della matrice delle
probabilità di transizione P= [pij], che, di conseguenza, soddisfa le seguenti proprietà:
pij∈[0,1] e Σ j p ij =1, ∀i,j∈E. Da ora in poi consideriamo soltanto catene di Markov
omogenee.
S. Balsamo
- 27 -
Una catena di Markov può essere analizzata sia in un tempo finito (analisi transiente)
sia a lungo termine (analisi stazionaria).
Analisi transiente
Denotiamo con pij(m) = Prob {Xn+m = j | Xn = i} la probabilità di transizione
dallo stato i allo stato j in m passi, ∀i,j∈E, ∀m>0. Considerando un qualsiasi stato
k∈E, la transizione dallo stato i allo stato j in m passi può essere vista come
composizione della transizione dallo stato i allo stato k in m-1 passi seguita dalla
transizione dallo stato k allo stato j in un passo. Per la definizione di processo
Markoviano i due eventi sono indipendenti e si può scrivere:
pij(m) = Σ k∈E pik (m-1) pkj
m>1
(2.5).
Tale formula è nota come equazione di Chapman-Kolmogorov per il calcolo della
probabilità in m passi. In forma matriciale dalla formula (2.5) segue immediatamente
che la matrice delle probabilità di transizione in m passi P(m) è calcolabile come
P(m) = P(m-1) P da cui, per l’omogeneità della catena P(m)=Pm.
Sia πj(n)= Prob{Xn= j} la probabilità di osservare lo stato j al tempo n, ∀j∈E,
∀n>0. In forma compatta indichiamo con π(n) = [π0(n) π1(n) π2(n) ...] il vettore
delle probabilità di stato al tempo n. Se la distribuzione di probabilità di stato del
processo al tempo iniziale π(0) è nota, allora la distribuzione di probabilità di stato al
tempo n>0 è calcolabile come
π (n) = π (0) P (n)
ovvero
π (n) = π (0) P n
(2.6).
Il comportamento transiente del processo è descritto dal vettore π(n) che può
essere quindi calcolato dalla probabilità di stato iniziale e dalla matrice di transizione
P. Tale soluzione è facilmente calcolabile solo in casi particolari, ad esempio per
catene di Markov con spazio E finito e/o per particolari strutture della matrice P.
L’analisi del comportamento del processo di Markov per n che tende ad infinito
richiede l’identificazione degli stati che il processo visita infinite volte. Per questo
scopo introduciamo una breve classificazione degli stati di una catena di Markov.
Classificazione degli stati
Una catena di Markov può essere rappresentata dal diagramma di transizione fra
S. Balsamo
- 28 -
stati. Esso è un grafo orientato con archi etichettati, i cui nodi rappresentano gli stati
del processo e in cui esiste un arco (i,j), con etichetta pij se e solo se la probabilità di
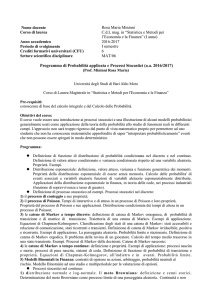
transizione pij>0. La Fig. 2.2 mostra un esempio di catena di Markov finita con spazio
E={1,2,3,4,5,6} e matrice di transizione P e il relativo diagramma degli stati.
Una catena di Markov è detta irriducibile se ogni stato può essere raggiunto da
ogni altro stato in un tempo finito, ovvero se per ogni i,j∈E esiste un m>0 tale che
pij(m)>0. Un sottoinsieme di stati E' di E è chiuso se non esiste alcuna transizione da
E' al suo complemento E-E'. Una catena di Markov con spazio E che contiene
sottoinsiemi chiusi è riducibile. Se E'={i} sottoinsieme chiuso di E è formato da un
solo stato i, questo si dice stato assorbente. In questo caso pii=1. Uno stato i∈E è
ricorrente se il processo, iniziando nello stato i, torna allo stato i con certezza (con
probabilità 1). Uno stato i è ricorrente non-nullo (o ricorrente positivo) se il tempo
medio di ricorrenza in i è finito, mentre è ricorrente nullo se il tempo medio di
ricorrenza in i è infinito. Uno stato i è transiente se vi è probabilità non nulla di non
ritorno allo stato i.
Per uno stato ricorrente i si definisce il periodo γi come il massimo comun divisore
dell’insieme degli interi m per cui pii(m)>0. Uno stato ricorrente è aperiodico se γi=1
ed è periodico se γ i>1.
Una catena di Markov è ergodica se è irriducibile e formata da stati aperiodici e
ricorrenti non nulli.
Esempio. In Fig. 2.2 il sottoinsieme E'={1,2,3} è chiuso, gli stati 1, 2 e 3
sono ricorrenti periodici di periodo 3. Gli stati 4 e 5 sono transienti e lo stato
6 è assorbente.
Per catene di Markov irriducibili si può dimostrare [FEL 66] che tutti gli stati sono
o transienti o ricorrenti nulli o ricorrrenti non-nulli e, se periodici, hanno tutti lo stesso
periodo.
P=
0
0
1
0
1
0
0
0
0
1
0
0
0
0
0
0
0 0
0 0
0 0
0.5 0.5
0 0 0 0.7 0 0.3
0 0 0 0 0 1
2
1
4
6
3
5
Fig. 2.2 - Esempio di diagramma fra gli stati di una catena di Markov a tempo discreto
con matrice delle probabilità di transizione P -
S. Balsamo
- 29 -
Analisi stazionaria
La descrizione del processo stocastico in condizioni asintotiche, per il tempo n che
tende ad infinito, si esprime in termini di distribuzione di probabilità di stato. Sia π j =
limn→∞ πj (n) = Prob{X= j} la probabilità di osservare lo stato j in condizioni di
equilibrio, ∀j∈E. In forma compatta indichiamo con π = [ π0 π 1 π2 ...] il vettore delle
probabilità stazionarie di stato.
Riportiamo, senza dimostrazione, un importante teorema della teoria delle catene
di Markov.
Teorema [KLE 75]
La distribuzione di probabilità stazionaria π di una catena di Markov omogenea,
irriducibile e aperiodica esiste sempre ed è indipendente dallo stato iniziale. Inoltre
• se gli stati sono transienti o ricorrenti nulli πj= 0, ∀j∈E, e non esiste
distribuzione stazionaria;
• se gli stati sono ricorrenti non-nulli π j > 0, ∀j∈E, e la distribuzione stazionaria π
è l’unica soluzione non negativa del sistema lineare
π =π P
(2.7)
con la condizione di normalizzazione Σ j π j =1.
In altre parole π è l’autovettore sinistro associato all’autovalore dominante di P,
uguale ad 1, poiché la matrice P è stocastica.
Se una catena di Markov è finita e irriducibile allora tutti gli stati sono ricorrenti
non nulli e la distribuzione stazionaria di stato si calcola risolvendo il sistema (2.7).
L’analisi stazionaria di una catena di Markov omogenea irriducibile e aperiodica
richiede quindi semplicemente la soluzione di un sistema lineare la cui dimensione è
pari alla cardinalità dello spazio degli stati E. Questo sistema lineare è risolvibile
esattamente soltanto per catene di Markov finite o per particolari strutture della
matrice P. Un altro approccio risolutivo, spesso applicato per catene aperte, si basa sul
metodo di trasformazione della funzione di probabilità in funzione generatrice.
Ricordiamo inoltre che, per la proprietà di assenza di memoria della catena di
Markov, possiamo anche analizzare il tempo di permanenza in ogni stato del processo.
La v.c. t i che denota il tempo in cui la catena rimane nello stato i∈E durante una sola
visita (ovvero con continuità) è distribuita geometricamente con parametro pii,
probabilità di transizione dallo stato i ad i stesso. La probabilità di un tempo di visita
di n passi (n>0) è Prob{ti =n}= (1-p ii ) p iin-1, e il numero medio di passi spesi nello
stato i sono E[ti] = 1/(1-pii).
2.3.2 Catene di Markov a tempo continuo
S. Balsamo
- 30 -
In un processo stocastico di Markov a tempo continuo {X(t) | t∈T} lo stato futuro
dipende soltanto dallo stato corrente e non dall’evoluzione precedente del processo,
come espresso dalla formula (2.2). Assumiamo, senza perdita di generalità che T sia
l’insieme dei reali non negativi R0+. Se anche lo spazio degli stati E è discreto allora
{X(t) | t ≥ 0} è una catena di Markov a tempo discreto, e X(t) = j indica che il processo
si trova nello stato j al tempo t≥0, j∈E. Se indichiamo il tempo t=tn+s, con s>0, allora
possiamo riscrivere la formula (2.2) come segue
Prob {X(tn+s)=j | X(t0)=i0; X(t1)=i1;...; X(tn)=in} = Prob {X(tn+s)=j | X(tn)=in
per ogni n>0, per ogni j,i0,i1,...,in∈E e per ogni t0<t1<...tn<tn+s.
Una catena di Markov a tempo continuo è omogenea se la probabilità condizionata al
membro destro è indipendente dall’istante iniziale t n, ma dipende soltanto da s;
definiamo la probabilità di transizione dallo stato i allo stato j in un intervallo di
ampiezza s come segue:
pij(s) = Prob {X(tn+s) = j | X(tn) = i}
(2.8)
∀i,j∈E, ∀tn≥0. Tali probabilità costituiscono gli elementi della matrice delle
probabilità di transizione P(s) = [pij(s)] che gode delle stesse proprietà osservate nel
caso discreto: p ij(s)∈[0,1] e Σj pij(s) =1, ∀i,j∈E. Consideriamo soltanto catene di
Markov omogenee.
Analogamente alle catene di Markov a tempo discreto, si può ricavare l’equazione
di Chapman-Kolmogorov per le catene di Markov omogenee a tempo continuo:
pij(s+t) = Σ k∈E pik (s) pkj (t)
s,t >0
(2.9)
e, in forma matriciale P(s+t)=P(s)P(t) e si pone per definizione P(0)=I, matrice
identità.
Poiché l’uso diretto dell’equazione (2.9) per determinare la soluzione transiente è
complesso, si derivano altre equazioni ottenute considerando condizioni limite, ovvero
differenziando.
Mentre nel caso di catene a tempo discreto si fa riferimento alla matrice di probabilità
di transizione relativa ad un passo (discreto), nel caso di catene a tempo continuo dalla
matrice di transizione P(s), definita in funzione dell’intervallo di ampiezza s>0, si
definisce una matrice Q delle velocità infinitesimali di transizione fra gli stati. Tale
matrice Q = [qij], i,j∈E, è anche detta generatore infinitesimale del processo o
matrice delle velocità di transizione, ed è definita come:
S. Balsamo
- 31 -
Q = lim
s→0
P(s) - I
s
(2.10)
dove
qii = lim
s→0
pii (s) -1
s
qij = lim
s→0
pij (s)
i≠j
s
∀i,j∈E
Gli elementi della matrice Q possono essere interpretati, rispettivamente, q ii come la
velocità complessiva di uscita dallo stato i, quando il processo è nello stato i, e q ij
come la velocità con cui il processo si sposta dallo stato i allo stato j, partendo dallo
stato i.
Dalla condizione di normalizzazione sulle probabilità, Σj pij(s)=1, deriva la
condizione sulle righe di Q: Σj qij=0, ∀i,j∈E. Si noti che gli elementi di Q sono
velocità di transizione e non probabilità, e quindi possono assumere valori maggiori di
uno.
Una catena di Markov a tempo continuo può essere rappresentata dal diagramma
di transizione fra stati, grafo orientato con archi etichettati, i cui nodi rappresentano gli
stati del processo e in cui esiste un arco (i,j), i≠j, con etichetta qij se e solo se la
velocità di transizione qij>0, i,j∈E. Si noti che in tal caso nel grafo non sono
rappresentati gli archi corrispondenti agli elementi diagonali, qii, i∈E.
Dalla definizione di matrice Q, con alcuni passaggi si possono ricavare le seguenti
equazioni differenziali:
d P(t)
= P(t) Q
dt
d P(t)
= Q P(t) .
dt
Imponendo la condizione iniziale P(0)=I, si ricava la soluzione
P(t) = e Q t t>0
(2.11)
dove la matrice potenza è definita come:
eQ t = I + Q t + Q2 (t2 / 2!) + Q3 (t3 / 3!) + ... .
Analisi transiente
Sia πi(t)= Prob{X(t) = i} la probabilità di osservare lo stato j al tempo t, ∀i∈E,
∀t>0, e, in forma vettoriale π(t) = [ π0(t) π 1(t) π2(t) ...]. Il comportamento transiente
S. Balsamo
- 32 -
può essere ricavato dalla distribuzione di probabilità di stato del processo al tempo
iniziale, π(0), e dalla matrice di probabilità di transizione P(t) tramite l’equazione:
π(t) = π(0) P(t), t>0, dove P(t) è definita dall’equazione (2.11).
Analisi stazionaria
Per definizione della matrice Q, per un piccolo intervallo dt>0, possiamo scrivere
π i(t + dt) = πi(t) [1-Σj≠ i qij dt ] + Σj≠ i qji dt +o(dt )
da cui, poiché qii=-Σj≠ i qij e considerando il limite per dt che tende a 0, si ricava
d πi (t)
dt
=
∑ π (t) q
j
ji
j∈S
e, in forma matriciale
d π (t)
= π (t) Q
dt
(2.12).
Sia πj = limt→∞ π j(t) = Prob{X= j} la probabilità di osservare lo stato j in
condizioni stazionarie, ∀j∈E, e in forma vettoriale π = [ π0 π 1 π 2 ...].
La classificazione degli stati di una catena di Markov a tempo continuo è identica a
quella introdotta per le catene a tempo discreto. In particolare una c. di M. a tempo
continuo è irriducibile se ogni stato può essere raggiunto da ogni altro stato. In tal caso
vale il seguente teorema:
Teorema. Per una catena di Markov a tempo continuo omogenea, irriducibile ed
aperiodica esiste sempre la probabilità stazionaria di stato πj = lim t→∞ πj(t), j∈E, ed
è indipendente dallo stato iniziale.
La soluzione stazionaria si ottiene allora imponendo dπ(t) / dt =0 da cui, dalla
equazione (2.12) deriva
π Q=0
(2.13)
che, insieme alla condizione di normalizzazione Σ i πi =1, determina univocamente la
soluzione.
Si noti che anche in questo caso la soluzione stazionaria della catena di Markov è
espressa in termini di soluzione di un sistema lineare omogeneo la cui dimensione è
S. Balsamo
- 33 -
pari alla cardinalità dello spazio degli stati E. In particolare tale sistema è infinito se lo
spazio E è infinito.
Il sistema di equazioni (2.13) è detto anche sistema di equazioni di bilanciamento
globale in quanto la singola equazione relativa allo stato i può essere riscritta come:
πi
Σj≠ i qij = Σj≠ i
π j qji
(2.14).
Tale equazione si può interpretare come bilanciamento fra il flusso totale uscente dallo
stato i (membro sinistro) e il flusso totale entrante in i e proveniente da tutti gli altri
stati j≠i (membro destro). Il termine globale è utilizzato per distinguere questo sistema
dal cosiddetto sistema di equazioni di bilanciamento locale che il processo
Markoviano soddisfa soltanto sotto particolari condizioni. Una catena di Markov
soddisfa il bilanciamento locale se sono uguali il flusso di probabilità da uno stato i ad
uno stato j e viceversa, ovvero se per ogni i,j∈E
π i qij = π j qji
(2.15).
Sommando le equazioni (2.15) per j≠i si ottengono le equazioni (2.14); quindi se un
processo soddisfa le equazioni di bilanciamento locale allora soddisfa anche le
equazioni di bilanciamento globale, mentre il contrario non è necessariamente vero. Il
bilanciamento locale è strettamente legato al concetto di processo di Markov
reversibile di cui si può trovare una estesa trattazione in [KEL 79].
2.4 Processi di nascita-morte
Vediamo ora una classe particolare di processi di Markov per la quale è possibile
calcolare molto semplicemente la soluzione e che trova ampia applicazione nei
modelli basilari di teoria delle code. In una catena di Markov di nascita-morte (birthdeath), con spazio degli stati E=N, le uniche transizioni fra stati ammesse sono dallo
stato i agli stati i-1, i, i+1, ∀i∈E. Se lo stato è interpretato come la dimensione di una
popolazione, una transizione da i ad i+1 rappresenta una nascita ed una transizione da i
ad i-1 rappresenta una morte.
λ
λ0
0
1
2
1
µ
1
S. Balsamo
µ
...
λ k-1
k-1
k
µ
2
- 34 -
λ k
k
k+1
µ
k+1
...
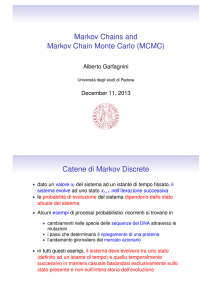
Fig. 2.3 - Diagramma degli stati di un processo di nascita e morte Consideriamo un processo di nascita-morte a tempo continuo. In tal caso
definiamo la matrice Q = [qij] delle velocità di transizione fra stati i,j∈E, come:
q i i+1 = λ i
i≥0
q i i-1 = µ i
i≥1
q 0 0 = -λ 0
q i i = - (λ i + µ i )
i≥1
qij =0
per | i - j | > 1
dove λi e µ i denotano, rispettivamente, il tasso di nascita e di morte quando il
processo è nello stato i. Il processo è omogeneo perché questi tassi dipendono solo
dallo stato e non dal tempo. La matrice Q ha struttura tridiagonale. La Fig. 2.3 mostra
il diagramma di transizione fra stati del processo.
Il sistema di equazioni (2.12) relativo alla distribuzione di probabilità di stato π(t)
al tempo t>0 per un processo di nascita e morte assume la forma seguente:
d π 0 (t)
dt
d πk (t)
dt
= µ1 π 1 (t) - λ 0 π 0 (t)
= λ k-1 πk-1 (t) + µk+1 π k+1 (t) - (λ k+ µk ) πk (t)
k>0
Questo sistema di equazioni descrive il comportamento del processo in funzione del
tempo e può essere risolto assumendo una distribuzione di probabilità di stato iniziale.
Se il processo di nascita e morte è irriducibile la probabilità stazionaria di stato π si
ottiene dalla soluzione del sistema di equazioni di bilanciamento globale (2.13) che
può essere riscritto come:
µ1 π 1 = λ 0 π0
λ k-1 π k-1 + µk+1 π k+1 = (λ k + µk ) π k
k>0
Questo sistema può essere facilmente risolto ad esempio per sostituzione. Infatti dalla
prima equazione si ricava
π1 = π 0
λ0
µ1
e per sostituzione, dalla seconda equazione
S. Balsamo
- 35 -
π2 = π 1
λ1
= π0
µ2
λ 1 λ0
µ2 µ1
e, per sostituzioni successive, dall’equazione k-sima
πk = π k-1
λk-1
µk
k-1
= π0
∏
i=0
λi
k>0
µi+1
Infine, sfruttando la condizione di normalizzazione sulle probabilità,
(2.16).
Σ i π i =1,
si
ottiene
1
π0 =
∞
1+
k-1
∑∏
k=1 i=0
λi
(2.17).
µi+1
La soluzione stazionaria del processo di nascita e morte a tempo continuo espresso
dalle formule (2.16) e (2.17) può essere applicata soltanto se il processo è ergodico. In
altre parole i tassi di nascita e di morte devono garantire che vi sia una probabilità non
nulla di sistema vuoto, π0 > 0.
Condizione di stazionarietà
Una condizione necessaria e sufficiente perché il processo di nascita e morte sia
ergodico (irriducibile, aperiodico, ricorrente non nullo) [KLE 75] è che esista un k0>0
tale che ∀k > k 0 sia λk < µ k.
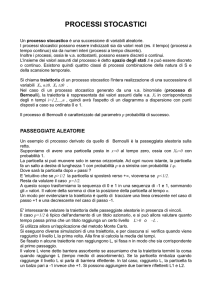
Processo di pura nascita
Considerando il particolare processo di nascita e morte in cui i tassi di morte sono
nulli (µ k=0, k>0), definiamo un processo di pura nascita. Assumiamo inoltre che il
tasso di nascita sia costante, indipendente dallo stato: λ k = λ, k≥0. Il diagramma degli
stati è mostrato in Fig. 2.4. Il sistema (2.12) relativo delle probabilità di stato π(t) al
tempo t diventa
λ
λ
0
1
λ
2
... k-1
λ
k
k+1
...
Fig. 2.4 - Diagramma degli stati di un processo di pura nascita -
S. Balsamo
- 36 -
d πk (t)
dt
= - λ πk (t) + λ π k-1 (t)
d π0 (t)
k≥1
dt
= - λ π 0 (t)
Assumendo la condizione iniziale di sistema vuoto, π 0(0) = 1, πk(0) = 0, ∀k≠0, si
ricava facilmente la soluzione transiente:
πk (t) =
(λt)
k!
k
- λt
k ≥ 0, t ≥ 0
e
che riconosciamo, in accordo alla formula (2.3), come la distribuzione di Poisson di
parametro λt, di media e varianza λt. Si noti che il processo di pura nascita non
soddisfa la condizione di stazionarietà, infatti tutti gli stati sono transienti, e quindi
non esiste la soluzione stazionaria.
Nel prossimo capitolo introduciamo un particolare processo di nascita e morte con
il quale è possibile rappresentare un modello basilare di code: il sistema M/M/1 ed
alcune sue varianti.
S. Balsamo
- 37 -