Analisi errore per
EDO
Analisi Numerica
Prof. M. Lucia Sampoli
a.a. 2013/2014
Metodi multistep lineari
La forma generale di questi metodi è
k
j 0
k
j
yn j h j f n j
n 0,1, 2...
j 0
dove αj βj sono costanti e k 0, k k 0, f n j f ( xn j , un j )
I metodi discreti multistep a k-passi necessitano di k valori innesco.
Se βk=0: metodo esplicito, se βk≠0: metodo implicito
I metodi espliciti sono più facili da calcolare. Nella pratica vengono
maggiormente usati i metodi impliciti che danno prestazioni migliori,
anche se più costosi dal punto di vista computazionale.
Dalla formula sopra se ne può ottenere una equivalente
yn k h k f ( xn k , yn k ) g n k 0
k
Si può dimostrare che esiste unica la soluzione un+k se
k
Lh
1
k
Analisi degli errori
Dato un metodo discreto nella sua forma generale (LMM,PC, R-K,..)
0 r k valori di innesco
yr sr (h)
k
i yn i h f ( xn , yn k ,..., yn , h)
i 0
Definiamo il seguente polinomio (legata alla eq. alle differenze):
k
( ) i i
i=0
Nel caso dei LMM possiamo definire anche un secondo polinomio
k
( ) i i
i=0
Convergenza
La richiesta minimale da fare ad un metodo discreto affinché dia una
buona approx della soluzione esatta è che sia convergente, cioè:
max yn y ( xn ) 0 per h 0
0 n N
Ne segue che per un metodo MS la convergenza deve implicare la
convergenza anche dei valori di innesco. Inoltre dalla convergenza
uniforme segue anche la convergenza puntuale: fissato x=a+ih, si
ha che
i
per
h0
0, h , i
tali che
y ( x) yi i i e h h
Coerenza (consistenza)
Definizione: si definisce l’errore di discretizzazione locale la quantità
d ( xn k , y ( xn k ))
1
nk
'(1) h
Definizione: un metodo discreto si dice coerente (o consistente) se
max
0 n N
dn 0
per h 0
Inoltre si dice coerente di ordine p se max ||dn||=o(hp)
dnk
Caratterizziamo in modo più pratico la coerenza
1 k
j [ y ( xn ) j h y '( xn j h)] h ( xn k , y ( xn k ), , y ( xn ), h)
'(1) h j 0
y ( xn ) k
(
,
(
))
(
,
(
),...,
(
),
)
h
j
f
x
h
y
x
h
h
x
y
x
y
x
h
j
n
j
n
j
nk
nk
n
'(1) h j 0 j
Coerenza (consistenza)-2
Dalla precedente espressione segue che condizione necessaria e
sufficiente per la coerenza è che si abbia:
1. lim yr y0 r 0,1,...k 1
h 0
2.
j
0 ( (1) 0)
3. lim ( xn k , y ( xn k ), , y ( xn ), h)
h 0
j
f ( x, y ( x)) '(1) f ( x, y ( x))
La condizione 3 puo’ essere cosi riscritta:
MML: (1) '(1)
PECE: (1) '(1) ( (1) 0, (1) 0)
R-K: c '(1)
Le tre condizioni sopra elencate sono necessarie per la
convergenza
la coerenza è condizione necessaria per la
convergenza.
C
k
j
C
C
P
Stabilità
Dobbiamo formulare una richiesta analoga alla dip. continua dai dati per
il metodo numerico. La sola richiesta che il problema sia ben
condizionato (garantito per es. dalla lipschitzianità di f) è necessaria ma
non sufficiente. Bisogna richiedere che anche il metodo discreto non
propaghi gli errori.
Tale richiesta è suggerita dalla necessità di tenere sotto controllo gli
inevitabili errori che l’aritmetica finita di ogni calcolatore introduce.
Definizione:Siano δn δn*, n=0,1,…,N due qualsiasi perturbazioni del MD
e siano zn e zn* le sol. perturbate. Se esiste h0,k tali che per ogni hє(0,h0]
zn zn* k
quando
n n*
si dice che il metodo è zero-stabile.
La stabilità dello schema discreto è legata al comportamento delle
radici del polinomio caratteristico
Stabilità: condizioni alle radici
Definizione: Un MD soddisfa la condizione delle radici se le radici del
primo polinomio ρ(θ) sono dentro il cerchio unitario e quelle sulla
circonferenza sono semplici.
Definizione: Un MD soddisfa la condizione forte delle radici se ρ(θ) ha
una sola radice semplice in +1 e le rimanenti sono tutte
strettamente interne al cerchio unitario.
Se il metodo è coerente ρ(1) =0, per cui +1 è radice
Convergenza
Teorema: Un metodo discreto è zero-stabile se e solo se soddisfa la
condizione delle radici
Nei metodi one-step ρ(θ)=α1θ-α0, per cui si ha una sola radice, che è
uguale a 1 se il metodo è consistente (infatti in questo caso ρ(1)=α1α0=0 → α1=α0)
Teorema (Dahlquist): Un metodo discreto è convergente se e solo se è
consistente e zero-stabile
Corollario: Un metodo one-step è convergente se e solo se è consistente
Riassumendo:
La coerenza è il minimo livello di accuratezza da richiedere. Essa controlla
la grandezza dell’errore di discretizzazione locale
La zero-stabilità controlla il modo in cui si propagano gli errori quando h→0
Entrambe sono necessarie per raggiungere la convergenza
Errore globale
Nel caso in cui si tenga conto degli errori di arrotondamento, la
soluzione effettivamente calcolata non soddisferà esattamente
l’equazione alle differenze, ma si avrà
k
i 0
i
yn i h f ( xn , yn k ,..., yn , h) Rn k
Analogamente si avrà per i valori iniziali:
yr sr (h)
0r k
Si definisce quindi l’errore globale di arrotondamento y j y j j
che dipende dagli errori locali e dalla loro propagazione
Errore totale
L’errore totale sarà quindi dato da
En y n y ( xn ) y n yn yn y ( xn )
n
en
L’errore totale è composto da due parti:l’errore globale di
arrotondamento εn e l’errore globale di discretizzazione en
Esiste una soglia inferiore al di sotto della quale l’errore totale
aumenta!
Assoluta stabilità
I metodi numerici devono rispettare alcune proprietà della soluzione
esatta, quale, per esempio, fornire una soluzione limitata se la
soluzione esatta è limitata.
Zero-stabilità di un metodo numerico: si studia il comportamento
della soluzione yn in [x0, x0+X] per h→0
Assoluta stabilità di un metodo numerico: si studia il comportamento
della soluzione yn per xn→∞, per h fissato. Proprietà legata al
comportamento asintotico di yn ; viene anche chiamata stabilità per
h fissato.
Assoluta stabilità
In pratica h non può tendere a zero, quindi la convergenza non è
una garanzia assoluta che un metodo fornisca dei risultati
numericamente accettabili, in quanto la zero stabilità assicura la
propagazione stabile degli errori per h→0.
Necessità di una nuova definizione di stabilità per h fissato
Definizione: Un MD si dice assolutamente stabile per un certo h fissato
e per un dato PVI se l’errore globale rimane limitato per n→∞
Definizione legata al particolare PVI, che non permette un’analisi
generale del comportamento del metodo.
Osservazione: lo studio dell’errore equivale a considerare la soluzione
di
'( x) f y ( x, y ( x)) ( x)
z ( x) y ( x) ( x)
z ( xi ) y ( xi ) ei
(a )
Linearizzando lo Jacobiano fy , supponendolo costante, si può in
prima approssimazione riportare il problema ad un problema lineare
scalare: y’=λy (problema modello)
Polinomio di assoluta stabilità
Il pb. test è un modello accettabile interpretando λ ( anche complesso)
come un valore che localmente rappresenta un qualsiasi autovalore
dello Jacobiano di f.
Sostituendo il pb. test la funzione Φf del MD diventa lineare in yn+i i=0..k:
k
i 0
k
i
yn i h f ( xn , yn k ,..., yn , h) h i (h ) yn i
i 0
k
Possiamo pertanto scrivere:
i 0
k
i
k
i 0
y n i h f ( xn , y n k ,..., y n , h) h i (h ) y n i n k
i 0
k
i
y ( xn i ) h f ( xn , y ( xn k ),..., y ( xn ), h) h i (h ) y ( xn i ) n k
i 0
Sottraendo membro a membro: Er r r valori di innesco
k
i h i (h ) En i n k n k
i 0
Equazione alle differenze lineare non omogenea, se gli errori sono piccoli la
soluzione dipende dalle radici del polinomio caratteristico associate alla parte
omog.
k
( , h ) i h i (h ) i
polinomio di stabilita'
i 0
Regione di assoluta stabilità
Definizione: Lo schema è detto assolutamente stabile per un dato hλ (fix),
se le radici del polinomio di stabilità π(ξ,hλ), giacciono tutte nella
circonferenza unitaria, cioè: 1
La regione del piano complesso tale che h si ha assoluta
stabilitàè detta regione di assoluta stabilità:
Esempi:
h C : (h ) 1,
1, 2, , k
k
i
MLM: ( , h ) i hi ( ) h ( )
R-K: ( , h ) 1 0 h 0 (h ) :
i 0
0 (h ) polinomio(R-K espliciti), 0 (h ) funz. razionale(R-K impliciti)
kP P
P
PECE: ( , h ) ( ) h ( ) h P ( ) h ( )
k
Tutti i metodi a k passi ottimali hanno . I metodi di Adams espliciti
hanno in generale una regione più piccola di quelli impliciti dello stesso
ordine. A parte i R-K impliciti aumentando l’ordine si rimpicciolisce
Regione di assoluta stabilità: esempi
Ogni metodo ha la sua regione
di assoluta
stabilità.
k
k
Se hλ=0 allora ( , 0) i 0 i (h ) i i i ( ) . Se lo schema è
i 0
i 0
zero-stabile le radici di ρ(ξ) sono tutte interne al cerchio unitario.
Quindi per ogni MD il punto hλ=0 si trova sulla frontiera della
corrsispondente regione di assoluta stabilità
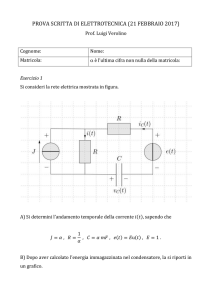
Eulero:
yi 1 yi h f ( xi , yi );
f ( x, y ) y
yi 1 yi h yi
( , h ) (1 h ) una sola radice 1 1 h
1 1 h (1) 1
-2
-1
Regione di assoluta stabilità: esempi -2
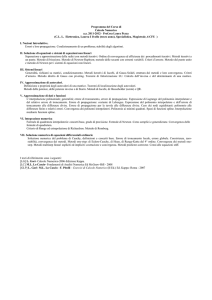
Eulero implicito:
yi 1 yi h yi 1
( , h ) (1 h ) 1 una sola radice 1 (1 h ) 1
(1 h ) 1 1 1 h 1
Trapezi (Crank-Nicolson)
yi 1 yi
h
( yi yi 1 )
2
1
1 h
1
1
( , h ) 1 h 1 h una sola radice 1 2
1
2
2
1 h
2
1 1 Re(h ) 1
Regione di assoluta stabilità: esempi -3
A-stabilità
Le regioni di assoulta stabilità appena viste non sono utilizzabili se
Re(λ)≥0 (con λ autovalore di fy). In questo caso le soluzioni
crescono al crescere di x e non ha senso chiedere che l’errore
rimanga limitato se y(x) diverge.
Il concetto di assoluta stabilità ha senso solo se Re(λ)<0 ovvero se il
problema di Cauchy è asintoticamente stabile (bencondizionato)
è evidente la convenienza di avere regioni di assoluta stabilità più
grandi possibile. Se |λ| è molto grande, può essere necessario
controllare hλ con un passo molto piccolo.
Più grande è RA,più grande può essere preso h (e meno calcoli
devono essere fatti).
Definizione: Un MD è detto A-stabile se la corrispondente RAcontiene
il semipiano Re(λ)<0 .
A(α)-stabilità
Nessun metodo LMM esplicito è A-stabile ed un metodo LMM
implicito A-stabile non ha ordine maggiore di 2. Tra questi il migliore
è il metodo di Crank-Nicolson.
Non esistono metodi R-K espliciti A-stabili
La condizione di A-stabilità è molto forte ed ha motivato lo studio e
sviluppo dei metodi R-K impliciti.
Richiesta più debole:
Definizione: Un MD è detto A(α)-stabile con 0, / 2 se la sua
regione di assoluta stabilità contiene il cono Wα di semiapertura
angolare α nella parte del semipiano sinistro complesso.
2
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-1
-0.5
0
0. 5
1
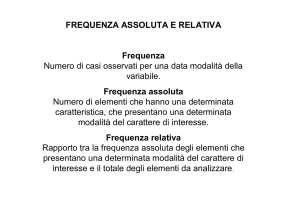
Problemi stiff
Il termine “stiff” viene usato per problemi differenziali le cui soluzioni
sono caratterizzati da parti con andamento molto difforme.
Esempio:
1.5
y ' 103 ( y e x ) e x
y (0) 0
3
y ( x) e x e 10
x
1
0.5
Un termine ha costante di decadimento 1 l’altro
ha una costante 10-3!
Dal punto di vista analitico l’equazione è asintoticamente stabile,
tende cioè ad uno stato stazionario.
Dal punto di vista numerico è estremamente difficile seguire la
soluzione nella sua fase transiente perché i MD richiedono un passo
troppo piccolo per soddisfare le condizioni di stabilità
In questi casi sono necessari MD con una grande regione di
assoluta stabilità
0
0
0. 5
1
1. 5
2
2. 5
3
Problemi stiff -2
Definizione (Lambert): Un problema è detto stiff se approssimato con un
metodo numerico caratterizzato da una regione di assoluta stabilità finita,
obbliga quest’ultimo, per ogni condizione iniziale per il quale il problema
ammetta soluzione, ad utilizzare un passo di discretizzazione eccessivamente
piccolo rispetto a quello necessario per descrivere ragionevolmente l’andamento
della soluzione esatta.
Definizione (2): Il sistema si dice stiff rispetto alla soluzione y(x) ed al
valore x se, detti λ1, λ2,,… λn, gli autovalori di fy(x,y(x)) essi sono tali che
(i ) Re(i ) 0 i
(ii )
max i Re(i )
1
min i Re(i )
: parametro di stiffness
Quindi in generale non ci deve essere LOCALMENTE nessuna componente
della soluzione instabile. Deve esistere una componente superstabile. La
soluzione a regime deve variare molto lentamente rispetto al contributo della
soluzione superstabile
Si osserva che ρ=ρ(x)
Stabilità per problemi stiff
Ci interessa l’accuratezza per i transienti veloci (associati ad autovalori con
parte reale molto negativa) e quindi non è necessario che tutto il semipiano
sinistro complesso stia in RA,, ma solo la parte che contiene gli autovalori hλ
molto negativi (distanti dall’asse Im), che sono la causa di stiffness.
Per tali autovalori h può essere grande in quanto i transienti si esauriscono
subito. Fissato quindi a>0 reale tutto il semipiano a sinistra di –a deve stare in
RA nella zona –a ≤ Re(hλ) ≤0 cioè per i transienti più lenti bisogna richiedere
maggiore accuratezza.
D’altra parte autovalori positivi e grandi generano instabilità (pb.
malcondizionati), quindi fissato b>0 a destra di b ho una regione di instabilità.
Bisogna tenere conto dei fenomeni di oscillazione legati alle componenti
oscillanti delle soluzioni dovute a parti immaginarie grandi,che vanno limitate
Definizione: un MD è stiffly stabile se esistono a,b,c >0 costanti, tali che
(i ) h : Re(h ) a A
(ii ) h : h (a, b) (c, c) si abbia accuratezza
h verrà scelto in modo che le componenti che decadono rapidamente siano
approx stabilmente e quelle che decrescono lentamente in modo accurato
Metodi BDF
I metodi BDF (Backward Differentiation Formulae) sono una classe di
metodi, introdotti da Gear, stiffly stabili
Esso sono un tipo particolare di LMM impliciti in cui si richiede che solo
un coefficiente βi≠0, in particolare quello di ordine piu’ elevato (β0)
Come suggerisce il nome essi sono costruiti approssimando la
derivata nel punto corrente fn mediante k valori precedenti yn-j
(backward differentiation):
k
yn i yn i h 0 f ( xn , yn )
i 1
Per k=1 si ottiene il metodo di Eulero all’indietro (o Eulero implicito)