Architetture di elaborazione neuromorfa
Cambiamo l'approccio allo studio di un modulo percettivo Finora abbiamo visto il sistema visivo
inteso come una black-box. Ora ci addentreremo nella struttura e la caratterizzeremo come connessione di blocchi semplici. Compariranno tanti sottoinsiemi che saranno interallacciati. Mentre
prima era suÆciente la relazione di ingresso e uscita, adesso abbiamo bisogno di una architettura
di sistema intesa come struttura. Dobbiamo percio denire:
ingresso, uscite e variabili di stato.
equazioni
! usso del segnale ! relazione di elaborazione
relazioni tra le parti componenti il sistema.
Quello che abbiamo pensato nora e il modello gerarchico, un modello multistrato in cui le unita
fondamentali possono essere accomunate secondo alcune caratteristiche. Di queste citiamo:
a) stesse proprieta di selettivita
b) stesse locazioni siche su vari strati
1
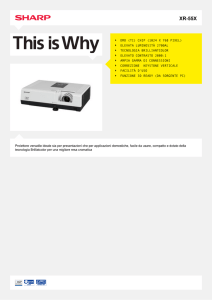
I tre tipi di connessioni tra cellule
Figura 1: I vari strati su cui si puo pensare sviluppato un sistema percettivi con le relative
connessioni
Cominciamo una descrizione dettagliata a partire da una determinata cellula, in un determinato strato (vedi g: 1). Verichiamo la presenza di connessioni dirette che provengono da un
altro strato ma anche connessioni intrastrato dalle altre cellule dello stesso strato. Esiste anche
una connessione di feedback o di retroazione che strati superiori esercitano sugli inferiori. Nella
corteccia ad un certo punto abbiamo la formazione di campi recettivi allungati dovuti al passaggio
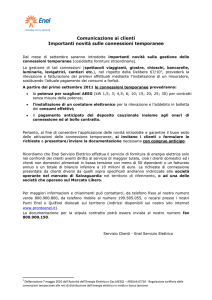
di strato delle connessioni che rompono la simmetria. Attraverso un modello alle connessioni solo
dirette Hubel-Wiesel (vedi g: 2) hanno dato un modello di campo recettivo dalla retina al LGN.
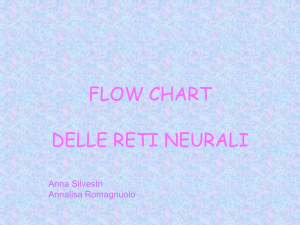
Tale modello pero non e suÆcientemente selettivo. Da questa obiezione si perviene un risultato
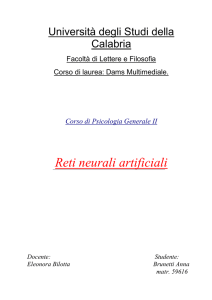
piu soddisfacente aggiungendo delle connessioni infrastrato (vedi g: 3). Studiamo modelli connessionisti, che sono alla base delle reti neurali, composti da tanti elementi semplici ttamente
connessi (vedi g: 4). I fattori chiave sono:
elevato n0 di unita elementari semplici
organizzazione funzionale delle loro interconnessioni
Si denisce un vettore di ingresso ~s = (s1 ; :::::::; sn ) e un vettore di stato ~u = (u1 ; :::::::; un ) e
considerano relazioni come
X
ui = wij sj
1
Figura 2: Esempio di campo recettivo desumibile dall'esperienza di Hubel-Wiesel
(a)
(b)
Figura 3: Incremento di selettivita all-orientamento rispetto al modello di Hubel-Wiesel: (a)
eccitazione e (b) inibizione
gli elementi wij rappresentano una matrice delle connessioni denita
0 w :::: w 1
11
1M
A
W = @ ::::::
wN 1 :::: wNM
Mentre la teoria delle connessioni puo riguardare zone variamente estese nello spazio noi
consideriamo solo zone limitate di connessioni che privilegiano dunque la localita.
2
Riduzione architetturale di un modulo percettivo
Abbiamo gia visto una descrizione di sistema percettivo comportamentale ma ne esiste anche una
architetturale. Di qui i primi due modelli.
2.0.1 Modello comportamentale
Il riferimento e la struttura gerarchica del modello percettivo visivo (vedi g: 5.a). Tale modello
ha il vantaggio della semplicita ma lo svantaggio della rigidita (tutte le connessioni non sono
modicabili)
2.0.2 Modello completamente connessionista
Costituisce l'alternativa al modello precedente (vedi g: 5.b) con il vantaggio dell'aderenza al
modello biologico e una migliore adattabilita (calcolo parallelo). Per contro, manca ancora
2
Figura 4: Modello che prevede solo connessioni dirette
(a)
(b)
(c)
Figura 5: Varie alternative per rappresentare un sistema percettivo: a) modello comportamentale;
b) modello completamente connessionista; c) modello misto
una suÆciente conoscenza del percorso visivo e sussiste un alto costo computazionale a causa
dell'esorbitante numero di connessioni.
2.0.3 Modello misto
Una via di mezzo alle soluzioni precedenti e rappresentata dalla congurazione di gura 5.c.
Suppongo di ssare un certo livello e immagino di "congelare" le proprieta di questo livello con un
modello comportamentale. Per gli strati superiori considero un modello connessionista a piu strati
per migliorare la selettivita. In tal modo si ottiene una progressiva scomposizione della scatola
nera tipo black-box che puo tendere a un modello completamente connessionista. Tale soluzione
ha il pregio di essere semplice e adattabile e riassume in tono minore gli svantaggi dei modelli
precedenti.
3
Primitive architetturali
Passiamo da una visione organizzativa ad uno studio dei componenti basilari. Questi sono
rappresentati da :
neuroni (i pallini)
le interconnessioni (tratti di unione)
Il modello generico di neurone cui possiamo far riferimento e costituito da un blocco sommatore
3
Figura 6: Modello del neurone come sommatore seguito da una non-linearita
Figura 7: Rappresentazione di neurone eccitatorio e inibitorio
seguito da un blocco non lineare (vedi g: 6). I neuroni possono essere di tipo eccitatorio o
inibitorio (vedi g: 7).
Per quanto riguarda le connessioni, queste sono anche dette sinapsi (talvolta si considera il peso
w con tale termine). Se consideriamo connessioni di somma, vale il principio di sovrapposizione,
mentre per connessioni non lineari diciamo di avere a che fare con modulazini (cioe moltiplicazioni
o divisioni). Chiariamo quali sono i tre tipi di variabili che entrano in gioco nella determinazione
del modello:
1. Variabili di stato: comprendono
ingresso
eccitazione
uscita
! s(x; t)
! e(x; t)
! u(x; t)
2. Variabili fisiologiche: saranno caratterizzate da una funzione da una funzione di trasferimento f (e) da tempi di ritardo T per la propagazione dell'attivita oltre che da un tempo di integrazione sinaptica e un coeÆciente di guadagno nel senso che si presenta u = f (e).
Variabili anatomiche: distribuzione (organizzazione delle connessioni delle intensita.
Tenuto conto di queste variabili, una equazione che descrive il sistema si puo presentare nella
forma
X
e(ik) = wij s(jk)
j
ovvero l'eccitazione e una combinazione lineare degli ingressi ,
u(ik) = i(k) f (e(ik) )
l'uscita e una funzione non lineare dell'eccitazione. Se aggiungo il ritardo nel tempo
e(ik) (t) =
X (k) (k)
wij sj (t Tj(k) )
j
Quando considero anche il tempo di membrana ottengo l'equazione dinamica dell'eccitazione
strati
X X (n) (n)
de(k)
wij f [ej (t Tj(n))]
i = e(ik) (t) +
dt
n j
4
3.0.4 Congurazione topologiche elementari di neuroni
Figura 8: Congurazioni topologiche fondamentali: a)convergenza, b)divergenza, c)seriale,
d)parallela , e)auotretroazione e f)feedback
Possiamo pensarle come modalita di collegamento di neuroni o nodi (vedi g: 8), ne esistono
sei tipi diversi:
convergenza
divergenza
seriale
parallela
autoretroazione
feedback; ne esistono di tre tipi: positivo eccitatorio, positivo inibitorio e negativo.
Distinguiamo le connessioni fra anatomiche e funzionali a seconda che siano semplicemente di
osservazione oppure diano luogo a inter-attivazioni o a co-attivazioni.
4
Campi neurali
Arontiamo una trattazione delle connessioni nel caso di campi continui. In generale la descrizione
del sistema e aÆdata ad alcune equazioni gia presentate. Citiamo
ej =
X
ij sj
il passaggio alla trattazione continua produce
e(x) =
Z
w(x; x0 )s(x0 )dx0 =)
nel caso sia spazio invariante dove il passaggio e i; j
Z
w(x x0 )s(x0 )dx
! (x; x0 )
con x; x0
2 <. Dal punto di vista
Figura 9: Il neurone con le distribuzioni pre e post sinaptiche
5
della topologia (vedi g: 9), deniamo due distribuzioni: la postsinaptica (Æ ) e la presinaptica
(). Formalmente queste due riconducono a
w(x; x0 ) =
Z
Æ(x; z )(z; x0 )dz
Dati due neuroni p e q gracamente possiamo rappresentare i collegamenti come in g: 11. E`
Figura 10: Rappresentazione funzionale delle terminazioni del neurone
Figura 11: Esempio di interattivazione fra neuroni
molto importante l'ordine degli indici. Possiamo introdurre un'altra variabile anatomica: la densita
cellulare che esprimiamo con la funzione f~(x) che e la densit
a di uno strato. Per quanto riguarda
l'elaborazione dell'informazione diamo uno sguardo alla trasformazione topograca applicata a due
strati neurali adiacenti. La localita e grosso modo conservata dalla trasformazione R : <2 ! <2
nel passaggio da x a x0 (intesi come strati, g: 12). Considerando interazioni tra piu strati neurali
Figura 12: Corrispondenza topograca tra diversi piani neurali
possiamo scrivere l'equazione di integrazione sinaptica come
Q
X
d
ep (x; t) = ep (x; t) +
dt
q=1
Z
sq (x0 ; t)Æpq (x x0 )dx0
dove la sommatoria riguarda tutti gli strati. Lo stato iniziale l'immagino ep (x; 0) nullo.
Consideriamo una operazione puntuale data dalla trasformazione
up (x; t) = f (e(x; t))f~(x)
Una terza equazione e data dalla propagazione assonica nella forma
sq (x; t) =
P Z
X
up (x; t)qp (x Rqp (x0 ))dx0
p=1
6
Se vale la linearita, cioe u = e, allora posso sostituire
Q
X
d
ep (x; t) = ep () +
dt
q
ovvero anche
QX
P
X
d
ep () = ep () +
dt
q p
!
Z Z X
P
0
0
ep ()qp (x x )dx Æpq (x x")dx"
p
Z
ep (x0 ; t)
Z
|
qp (x0
x")Æpq (x x")dx" dx0
{z
wpq (x x )
}
0
qui wpq rappresenta la forza di accoppiamento delle nuvole di interazione.
(a)
(b)
(c)
Figura 13: I vari insiemi neurali tipici: (a) K0; (b) KI; (c) KII.
Figura 14: Versione semplicata dell'insieme KII
4.0.5 Insiemi neurali tipici
Spesso si possono voler denire dei macroblocchi, che costituiscono i sistemi descritti a livello
continuo, in presenza di proprieta comuni. Come notazione facciamo riferimento a Walter Freeman:
egli deniva insiemi di ordine superiore denominati K di complessita crescente K 0, K 1 e KII .
Vediamoli nel dettaglio nella g. 13. Esiste anche una versione semplicata di KII (vedi g:14).
7