")
Note introduttive all’econometria
Domenico Suppa∗
25 maggio 2016
Il modello di regressione lineare
Date n osservazioni campionare relative alla variabile Y e a k − 1 variabili X i (con
k < n):
Y = [Yi ]
X = 1,[X i, j ]
per i = 1,..., n
per i = 1,..., n e per j = 2,..., k
nel modello di regressione lineare si ipotizza che tra Y e X sussista una relazione lineare
alterata solo dalla presenza di una componente erratica ε. Le condizioni imposte, per
ipotesi, sono le seguenti:1
Y = Xβ + ε
ipotesi di linearità della relazione tra Y e X
(I1)
E[ε|X] = 0
ipotesi di esogeneità dei regressori X
(I2)
Ci si pone l’obiettivo di stimare il vettore dei parametri incogniti β. Tale stima, β̂, si
può ottenere minimizzando la somma dei quadrati dei residui2 u = Y − Xβ̂:
min u0 u
β̂
(1)
Si tratta, quindi, di determinare β̂ di modo che la lunghezza del vettore u sia la
più piccola possibile. Ciò equivale a calcolare β̂ imponendo la condizione che u sia
∗
Università di Napoli "Federico II".
Gli elementi della prima colonna della matrice X sono posti tutti pari a 1, in tal modo il primo elemento
del vettore β, indicato con β0 , è il termine costante (l’intercetta) della funzione lineare che determina Y.
Riguardo alla condizione (I2) essa risulta generalmente troppo restrittiva e quindi, quando è possibile,
si richiede solo l’incorrelazione tra l’errore e i regressori della medesima osservazione: E[ε|X = xi ] = 0.
2
È chiaro che u 6= ε: l’errore ε resterà sempre incognito mentre i residui calcolati u possono consentire di
inferire le caratteristiche di ε solo se sono soddisfatte le ipotesi (I1), (I2) e quelle di seguito specificate
nel testo. L’ipotesi che le k colonne di X siano linearmente indipendenti garantisce che la matrice X0 X
sia invertibile (unicità della stima) e che essa sia definita positiva (in tal modo la somma dei quadrati
dei residui è minima). Per valutare se una matrice simmetrica definita positiva è quasi-singolare (cioè
molto vicina ad una matrice non invertibile) si utilizza l’indice di condizionamento che è pari al rapporto
tra il massimo e il minimo autovalore della matrice (se questo rapporto è molto distante da 1, allora
la matrice è quasi-singolare e i risultati dell’inversione dipendono drasticamente dalla precisione di
macchina del calcolatore). V. appendice A3.
1
1
ortogonale al sottospazio di Rn generato dalle colonne di X. Tale sottospazio avrà
dimensione k, se le k colonne di X sono linearmente indipendenti (questa è un’ipotesi
ulteriore che può essere verificata facilmente), e pertanto il vettore u giacerà nel
sottospazio di Rn di dimensione n− k (Rn−k è il complemento ortogonale di Rk rispetto
a Rn ). Imposta la condizione di ortogonalità X0 u = 0, determiniamo β̂ risolvendo il
seguente sistema di equazioni:
Y = Xβ̂ + u
(2)
dal quale otteniamo:
−1 0
β̂ = (X0 X)
XY
(3)
−1
Lo stimatore dei minimi quadrati (X0 X) X0 Y è costruito sulla validità della ipotesi (I1).
Se è valida anche l’ipotesi (I2), tale stimatore è corretto. Infatti, data la (I1), possiamo
riscrivere la (3) nel modo seguente:
−1 0
β̂ = (X0 X)
−1 0
X (Xβ + ε) = β + (X0 X)
Xε
(4)
e, grazie alla (I2), verificare che lo stimatore dei minimi quadrati è non distorto:3
−1 0
E[β̂|X] = E[(X0 X)
X (Xβ + ε)|X]
−1 0
= β + E[(X0 X)
X ε|X]
−1 0
= β + (X0 X)
X E[ε|X]
= β +0 = β
(5)
La distorsione da variabile omessa
L’importante risultato di correttezza delle stime ottenute con il metodo dei minimi
quadrati (espresso nella (5)) richiede (oltre alle ipotesi (I1) e (I2)) che tra i regressori
siano incluse tutte le variabili esplicative dalle quali dipende probabilisticamente Y; in
altre parole non devono esservi variabili omesse (si tratta di un requisito che talvolta
viene esplicitato come una ulteriore ipotesi).4 Le conseguenze dell’omissione di una
variabile esplicativa, importante nella determinazione di Y, possono essere illustrate
nel modo seguente. Poniamo di dividere i regressori in due gruppi X1 e X2 , in modo
da avere il seguente processo che genera Y:
Y = X1 β 1 + X2 β 2 + ε
(6)
ma, supponiamo di omettere i regressori X2 nella specificazione del modello che
vogliamo stimare, allora la stima di β1 sarà:5
−1 0
X1 Y
β̂1∗ = (X01 X1 )
(7)
−1
Per effettuare i passaggi è necessario tener presente il fatto che (X0 X) X0 è funzione deterministica di
−1
−1
X, per cui E[(X0 X) X0 |X] = (X0 X) X0 .
4
Come vedremo, aggiungere questa ulteriore ipotesi non è strettamente necessario e in pratica
risulterebbe ridondante in quanto è già contenuta nella (I2).
5
Premoltiplichiamo la specificazione scorretta Y = X1 β̂1∗ + u per X0 , assumiamo la condizione di
ortogonalità X0 u = 0 (che non è corretta), ed esplicitiamo rispetto a β̂1∗ .
3
2
ma, dato il modello vero, sostituendo la (6) nella (7) e prendendo il valore medio, si
ha:
−1 0
X1 X2 β 2
E[β̂1∗ |X1 ] = β1 + (X01 X1 )
(8)
Quindi la stima β̂1∗ è distorta (sistematicamente diversa da β1 ) se non si verifica almeno
una delle seguenti condizioni:
−1
• (X01 X1 ) X01 X2 = 0 (i regressori X2 sono incorrelati con - cioè ortogonali ai regressori X1 );
• β2 = 0 (i regressori X2 sono incorrelati con - cioè ortogonali a - Y).
L’ultima condizione (β2 = 0) ci dice che l’omissione di regressori (X2 ) irrilevanti nel
processo di generazione di Y non altera i risultati della regressione di Y su X1 (l’intuizione è ovvia). La prima condizione, invece, indica che quando i regressori sono tra
loro ortogonali (cioè incorrelati), abbiamo la possibilità di condurre separatamente le
regressioni di Y su X1 e di Y su X2 avendo la certezza di ottenere gli stessi parametri
che avremmo ottenuto dalla regressione condotta su tutti i regressori in un’unica soluzione. Più in generale, però, la distorsione causata dall’omissione di una variabile
−1
rilevante (quantificata dal termine (X01 X1 ) X01 X2 β2 della (8)), che non sia ortogonale
ai regressori utilizzati, conduce a stime distorte. Inoltre, la distorsione da variabile
omessa non diminuisce all’aumentare della numerosità campionaria (le stime quindi
risultano distorte e anche inconsistenti). In effetti, si dovrebbe riflettere sul fatto che
questa omissione invalida l’ipotesi (I2): la variabile omessa, correlata con i regressori
utilizzati, viene inglobata nei residui della regressione che, a questo punto, non possono
più essere incorrelati con i regressori utilizzati (viene meno l’ipotesi (I2)).
Ora risultà più chiaro il senso della seguente affermazione:
sotto le ipotesi (I1) e (I2) sul modello di regressione lineare,
• gli stimatori dei minimi quadrati producono stime non distorte dei parametri β.
Sfericità degli errori e teorema di Gauss-Markov
Riguardo agli errori ε è stata già introdotta l’ipotesi (I2) di ortogonalità rispetto ai
regressori X del modello di regressione lineare. Si è visto che le stime dei parametri β̂
sono non distorte se è soddisfatta questa ipotesi (insieme alla (I1)). Per indagare la
variabilità di β̂ è necessario formulare una ulteriore ipotesi inerente la distribuzione
degli errori.6
In condizioni ottimali gli errori dovrebbero essere omoschedastici e non autocorrelati:
Var[ε|X] = E[εε0 |X] = σ2 I
ipotesi di sfericità degli errori
(I3)
Dove σ2 è la varianza costante di ε e I è la matrice identità n × n. Se i regressori X
non sono stocastici (perché, ad esempio, scaturiscono da un disegno sperimentale),
allora (tenuto conto della (4)) le varianze e le covarianze del vettore β̂ possono essere
calcolate nel modo seguente:
VarX [β̂|X] = E[(β̂ − β)(β̂ − β)0 |X]
6
Al riguardo, si veda ad esempio Greene (2012, cap. 4).
3
−1 0
= E[(X0 X)
−1
X εε0 X(X0 X)
−1 0
= (X0 X)
−1
X E[εε0 |X]X(X0 X)
−1 0
= (X0 X)
|X]
−1
X (σ2 I)X(X0 X)
−1
= σ2 (X0 X)
(9)
Se i regressori X sono stocastici (cioè sono delle variabili casuali), allora (v. appendice
A1):
Var[β̂] = EX VarX [β̂|X] + VarX E[β̂|X]
−1
= EX [σ2 (X0 X)
−1
] = σ2 EX [(X0 X)
]
(10)
−1
Tale risultato
tenendo presente che per la (9) VarX [β̂|X] = σ2 (X0 X)
si ottiene
la (5) VarX E[β̂|X] = VarX [β] = 0.
e per
Dalle ipotesi (I1), (I2) e (I3) si ricava il teorema di Gauss-Markov:
• gli stimatori dei minimi quadrati dei parametri β del modello di regressione lineare
hanno varianza minima tra tutti gli stimatori lineari e non distorti di β (sono BLUE, best
linear unbiased estimator).
Per provare il teorema consideriamo un qualunque altro generico stimatore di β
−1
che sia, per ipotesi, lineare e non distorto ma diverso da (X0 X) X0 Y. La stima di β
−1
sarà data da β̂C = CY (dove C è una matrice di dimensione k × n al pari di (X0 X) X0 ).
Il requisito della non distorsione consiste nella seguente uguaglianza:
E[β̂C |X] = E [CY|X]
= E [(CXβ + Cε)|X] = β
(11)
−1
che è soddisfatta solo se CX = I. In generale avremo C = D + (X0 X) X0 (dove D è
−1
definita implicitamente) e quindi CX = DX + (X0 X) X0 X = DX + I = I solo se DX = 0.
Assumendo che sia soddisfatta questa condizione, calcoliamo la varianza di β̂C :7
VarX [β̂C |X] = E[(β̂C − β)(β̂C − β)0 |X]
= E[Cε(Cε)0 ] = E[Cεε0 C0 ] = CE[εε0 ]C0 = σ2 CC0
2
0 −1 0
0 −1 0 0
= σ (D + (X X) X )(D + (X X) X )
−1
= σ2 DD0 + σ2 (X0 X)
= σ2 DD0 + VarX [β̂|X]
(12)
l’ultimo passaggio riprende il risultato della (9). La (12) stabilisce che VarX [β̂C |X]
−1
raggiunge il minimo solo quando β̂C = β̂, poiché DD0 e (X0 X) sono entrambe definite
positive.
È bene ribadire che il teorema di Gauss-Markov può essere applicato solo se il
modello di regressione lineare è correttamente specificato (ipotesi (I1) e (I2)) e se gli
errori sono omoschedastici e non autocorrelati (ipotesi (I3)).8 In condizioni alternative,
7
8
−1
Sostituendo C nella (4) al posto di (X0 X) X0 , abbiamo (β̂C − β) = Cε.
Un ipotesi molto più forte della (I3) potrebbe richiedere che gli errori siano variabili casuali indipendenti
e identicamente distribuite (iid).
4
più generali, altri stimatori (non lineari e magari distorti) possono essere più efficienti9
degli stimatori dei minimi quadrati nell’inferenza sul legame funzionale esistente tra Y
e X.
La varianza dell’errore
Siccome σ2 è (e resta) ignota, la definizione della varianza degli stimatori dei
minimi quadrati, fornita dalla (9) o dalla (10), non è direttamente utilizzabile nei
calcoli. Pertanto, è necessario stimare la varianza degli errori per determinare la
varianza degli stimatori dei minimi quadrati. La soluzione è basata sulla definizione
dei residui. Dalla (2) e dalla (3), abbiamo:
u = Y − Xβ̂
−1
−1
= I − X(X0 X) X0 Y = I − X(X0 X) X0 [Xβ + ε]
−1
= I − X(X0 X) X0 ε = MX ε
(13)
−1
dove con MX è stata indicata la matrice [I − X(X0 X) X0 ].10 Notiamo che, per l’ipotesi
(I2), dalla (13) segue che E[u|X] = E[MX ε|X] = 0.
Sfruttando le proprietà della matrice MX , si può dimostrare che:
• la varianza campionaria dei residui:
Su2 =
u0 u
n−k
(14)
è uno stimatore corretto della varianza degli errori.
Omettendo per semplicità il pedice deponente assegnato alla matrice MX :
E[u0 u] = E[(Mε)0 (Mε)] = E[ε0 M0 Mε] = E[ε0 Mε] = E[t r(ε0 Mε)] = E[t r(Mεε0 )]
= t r(E[Mεε0 ]) = t r(ME[εε0 ]) = t r(Mσ2 I) = t r(M)σ2 = (n − k)σ2
(15)
Questo risultato proviene dal fatto che ε0 Mε è uno scalare (la cui traccia t r(ε0 Mε)
coincide con il suo valore) e dalla definizione di M (che è una funzione deterministica
di X).11
La matrice delle covarianze di u è data da:
Var[u] = E[uu0 ] = E[(Mε)(Mε)0 ] = E[Mεε0 M0 ] = M(σ2 I)M0 = σ2 M
9
(16)
Uno stimatore è più efficiente rispetto a un altro se ha una varianza più bassa.
Una generica matrice MX (denominata residual maker) trasforma un qualunque vettore (o variabile)
nei rispettivi residui ortogonali allo spazio generato dalle componenti (colonne) della matrice X. È
semplice dimostrare che MX è simmetrica (M = M0 ), idempotente (M2 = MM = M) e semidefinita
positiva (i suoi autovalori sono non negativi). La matrice HX = I − MX (hat matrix) che proietta un
qualunque vettore sullo spazio generato dalle colonne di X, gode delle stesse proprietà di MX . Gli
autovalori di entrambe le matrici assumono valore 0 o 1 e si può facilmente verificare che il prodotto
HX MX ha come risultato una matrice nulla. Dato che H è simmetrica e idempotente, abbiamo:
H2 x = λ2 x = Hx = λx e quindi λ2 − λ = 0, da cui segue che λ può assumere solo i valori 0 e 1.
11
Si tenga presente anche che, quando le dimensioni delle matricipermettonola commutazione
del
−1
−1
prodotto, t r(AB) = t r(BA). Pertanto: t r ε0 Mε = t r Mεε0 e t r X(X0 X) X0 = t r X0 X(X0 X)
.
10
5
La (16) mostra che anche se gli errori ε sono tra loro incorrelati e hanno varianza
costante (rispettando l’ipotesi (I2)), in generale, i residui u non hanno varianza costante
e presentano un certo grado di autocorrelazione.12
Ipotesi di normalità degli errori
Per concludere l’elenco delle proprietà finite di cui può godere la stima dei minimi
quadrati dei parametri del modello di regressione lineare aggiungiamo l’ipotesi di
normalità dei residui. La motivazione è dovuta al fatto che per condurre dei test
statistici sui parametri stimati è necessario conoscere la distribuzione dei rispettivi
stimatori.
Se gli errori del modello di regressione lineare si distribuiscono in modo normale e
indipendente (fermo restando le altre ipotesi (I1), (I2) e (I3)), applicando la proprietà
riproduttiva della v. c. normale alla (4), risulta che anche i (gli stimatori dei) parametri
sono distribuiti in modo normale (essendo questi ultimi il risultato
di unacombinazione
2 0 −1
lineare degli errori come mostrato dalla (4)): β̂|X ∼ N β,σ (X X)
. L’ipotesi di
normalità degli errori può essere formalizzata nel modo seguente:
ε ∼ N 0,σ2 I
distribuzione normale degli errori
(I4)
−1
Sotto questa ipotesi, date la (4) e la (9), indicando con (X0 X)ii il termine diagonale
−1
della matrice (X0 X) corrispondente al parametro βi , possiamo affermare che:
β̂i − βi
∼ N (0,1) = z
q
σ (X0 X)−1
ii
per i = 1,..., k
(17)
la v. c. definita dalla (17) si distribuisce come la normale standardizzata, indicata con
z. Applicando la proprietà riproduttiva della variabile casuale normale alla (13), si
può dedurre che, se per l’errore ε vale l’ipotesi
di normalità (I4), anche i residui hanno
2
una distribuzione normale u ∼ N 0,σ MX . Inoltre, si può dimostrare, che la variabile
casuale
u0 u
σ2
si distribuisce come una v. c. Chi-quadrato con n − k gradi di libertà:13
2
ε S (n − k)
u0 u ε 0
u
2
=
MX
=
∼ χ(n−k)
2
2
σ
σ
σ
σ
(18)
Rapportando la (17) alla radice quadrata della (18) (dopo aver diviso quest’ultima
per n − k), deduciamo che tale rapporto si distribuisce come una variabile casuale t di
12
Nei successivi paragrafi emergeranno ulteriori considerazioni sulla relazione tra errori e residui in
base all’esame delle matrici MX e HX . In particolare, esaminando i termini diagonali della matrice
MX si può mostrare che la variabilità dei residui è sempre minore di quella degli errori. Ciò è
evidente anche intuitivamente, in quanto i residui sono calcolati in base ad un criterio di distanza
minima (l’ortogonalità alle colonne della matrice X) mentre per gli errori l’ipotesi di ortogonalità è
generalmente soddisfatta
Pn solo con una certa approssimazione.
13
2
Ricordiamo che χ(n)
= i=1 zi2 , dove zi sono variabili casuali normali standardizzate e tra loro indipendenti. Il risultato presentato nella (18) deriva dal fatto che se x, ad m componenti, si distribuisce come
una variabile casuale normale multivariata con vettore delle medie pari a µ e matrice delle covarianze
pari a S, allora la forma quadratica (x − µ)0 S−1 (x − µ) si distribuisce come una variabile casuale
chi-quadrato con m gradi di libertà. (Piccolo, 1998, pp. 423 e 879), Greene (2012), v. appendice A2.
6
Student con n − k gradi di libertà:
β̂ −β
qi i
σ (X0 X)−1
ii
β̂i − βi
z
∼È
= t (n−k)
=r
q
2
Su2 (n−k)
χ(n−k)
Su (X0 X)−1
ii
2
(n−k)σ
(19)
n−k
Grazie alla (19), se è valida la (I4), si può codurre il test t di Student sul confronto tra
2
β̂i e βi . Nella (19) il numeratore z deve essere indipendente dal denominatore χ(n−k)
,
cioè lo stimatore del parametro deve essere indipendente dallo stimatore dell’errore
standard degli errori.14
Cenni alle proprietà asintotiche dei minimi quadrati
Circa la consistenza dello stimatore dei minimi quadrati di β, osserviamo che la sua
varianza, ottenuta dalla (9), può essere riscritta nel modo seguente:
σ2 1 0 −1
XX
(20)
Var[β̂] =
n n
Il secondo membro della (20) è costituito dal prodotto di due termini: il primo, σ2 /n,
tende a zero al crescere di n, il secondo (grazie all’applicazione della legge dei grandi
numeri, se la matrice X0 X non è singolare e i regressori presentano alcuni requisiti di
regolarità) tende (in probabilità) ad un valore limite costante.15 Pertanto, siccome
la varianza dello stimatore dei minimi quadrati tende a zero al crescere di n, tale
stimatore è consistente oltre che corretto.16
Nel caso gli errori non siano normalmente distribuiti, al fine di ottenere stimatori dei
minimi quadrati la cui distribuzione sia asintoticamente normale, è necessario disporre
di una elevata numerosità campionaria e formulare l’ipotesi di indipendenza seriale:17
(xi ,εi ) per
i = 1,..., n
sono serialmente indipendenti
(I5)
(questa ipotesi rafforza l’incorrelazione richiesta dall’ipotesi di sfericità dei residui
formulata dalla (I3)). In un certo senso, il venir meno dell’indipendenza, a causa degli
errori non più distribuiti normalmente, richiede un assunto esplicito sull’indipendenza
degli errori. Permane, invece, immutata l’ipotesi di varianza costante degli errori. Sotto
queste condizioni è possibile applicare il teorema limite centrale.18
14
V. Davidson e MacKinnon (2003, cap. 4). V. appendice A2.
V. Greene (2012, p. 103 e ss.).
16
Uno stimatore θ̂n è consistente per il parametro θ se, al crescere della numerosità campionaria n,
tende a 1 la probabilità che θ̂n assuma il valore θ .
17
Indichiamo con xi il vettore riga trasposto della matrice dei regressori relativo all’osservazione i-esima.
18
Le due formulazioni del teorema limite centrale più utilizzate in econometria sono: quella di LindebergLevy e, in particolare, quella di Lindeberg-Feller; riguardo alla prima, la formulazione (più semplice) è
la seguente (vedi appendice A9 a p. 25):
Se x 1 ,..., x n è un capione casuale (cioè a componenti indipendenti)
estratto da una popolazione la cui
Pn
p
2
i=1 x i
funzione di distribuzione ha media µ e varianza σ finite e x n = n , allora, per n → ∞, n(x n − µ)
2
si distribuisce come una v. c. normale N (0,σ ) .
Il secondo teorema limite centrale, quello di Lindeberg-Feller, invece, pur conservando l’ipotesi di
indipendenza, ammette che le v. c. x i presentino diverse varianze (e anche diverse medie). È proprio
questo il teorema limite necessario per ottenere la (21), dato che le varianze dei termini xi εi non
possono essere ritenute costanti anche se è costante la varianza di εi al variare di i. Greene (2012).
15
7
Tenendo presente la (4), possiamo scrivere:19
p
X0 X
n(β̂ − β) =
n
−1
X0 ε
p
n
a
∼ N 0, σ2
X0 X
n
−1 (21)
Il membro di sinistra si distribuisce asintoticamente come una v. c. normale
0 −1con media
zero e varianza finita. Si è già detto che, al crescere di n il termine XnX
tende in
probabilità ad una matrice con valori finiti. La stima della varianza σ2 può essere
basata ancora sulla varianza campionaria dei residui Su2 definita dalla (14).20
Svolgiamo in modo più formale e dettagliato questo discorso. Nel seguito indichiap
mo con “plim” o → la convergenza in probabilità.21
Nell’approccio alla regressione lineare su dati di elevata numerosità campionaria si
assume che:22
0
XX
plim
=Q
con Q definita positiva e finita
(I6)
n
Date le ipotesi (I1), (I2), (I3), (I5), (I6), abbandonando l’ipotesi (I4), dalla (4) si
deduce che:23
• i minimi quadrati stimano in modo consistente i parametri del modello di regressione
lineare.
Dato che:
0 −1 0
Xε
XX
0 −1 0
per la (4)
(22)
β̂ = β + (X X) X ε = β +
n
n
la dimostrazione della precedente proposizione è basata sulle seguneti convergenze in
probabilità:24
X0 X
n
−1
p
→ Q−1
per la (I6)
n
p
X0 ε 1 X
=
xi εi → E[xi εi ] = Exi [xi E[εi |xi ]] = 0
n
n i=1
p
β̂ → β + Q−1 0 = β
per la LDGN e la (I2)
per le precedenti.
(23)
Inoltre, si dimostra che:
• gli stimatori dei minimi quadrati si distribuiscono in modo asintoticamente normale.
19
a
Il simbolo ∼ indica che il termine di sinistra “si distribuisce asintoticamente come” il termine di destra.
20
Per le dimostrazioni di questi enunciati si veda Greene (2012, pp. 103 e ss. e app. D).
21
Una successione di variabili casuali X n converge alla variabile casuale X se e solo se, per qualsiasi
δ > 0:
lim P r ob(|X n − X |) < δ = 1
n→∞
in altri termini, al crescere di n, tende ad essere nulla la probabilità che X n assuma valori che si
discostano da X .
22
Nella prassi si richiede che siano rispettate le condizioni (minimali) di Grenander sul comportamento
regolare della matrice dei regressori. Greene (2012, p. 105).
23
Naturalmente, l’ipotesi (I4) potrebbe essere ancora valida senza in alcun modo compromettere il
discorso svolto in questa sede.
24
LDGN è l’acronimo di legge debole dei grandi numeri.
8
Consideriamo il termine
0
X
pε
n
=
Pn
i=1
xi εi
p
n
della (21), abbiamo E[xi εi ] = 0 e:
Var[xi εi ] = E[xi εi εi 0 xi 0 ]
n 0 0 0
X
xi εi
xi εi
p
= E xi E[εi εi 0 |xi ]xi 0 = σ2 E[xi xi 0 ] → σ2 Q
=
p
p
n
n
i=1
Pn
l’ultimo passaggio è giustificato all’identità X0 X = i=1 xi xi 0 ; infatti, dividendo ambo i
membri di quest’ultima per n e considerando l’ipotesi (I6), segue:
Pn
0
X0 X p
i=1 xi xi
E[xi xi 0 ] =
=
→Q
n
n
Pertanto, applicando il teorema limite centrale di Lindeberg-Feller, il termine
2
0
X
pε
n
della
(21) tende a distribuirsi asintoticamente come una v. c. normale N 0, σ Q . Gra25
zie a questi risultati, e alle (23), applicando il teorema di Slutsky,
deduciamo che
−1
−1 2
−1 0
la distribuzione asintotica del primo membro della (21) è: N Q 0, Q σ QQ
.
p
Quindi, come riportato
nella (21), la v. c. n(β̂ − β) tende a distribuirsi come una v. c.
2 −1
normale N 0, σ Q .
Infine:
• la varianza dei residui Su2 è uno stimatore consistente della varianza degli errori σ2 .
Dalla (14), ricordando la definizione della matrice M:
0
0 −1 0
0
0
ε
I
−
X(X
X)
X
ε
uu
ε Mε
Su2 =
=
=
n−k n−k
n−k
0
0 0 −1 0
εX
XX
Xε
n
εε
(24)
=
−
n−k n
n
n
n
n
Il fattore costante n−k
tende a 1 al crescere di n, il secondo termine della differenza
nelle parentesi quadre, grazie alla (I6) e alle convergenze in probabilità già calcolate
0
nella (23), tende ad annullarsi. Il termine εnε converge, sotto condizioni minimali, a
σ2 per n tendente all’infinito. Quindi: plim Su2 = σ2 e, pertanto, la varianza asintotica
−1
di β̂ è uguale a Su2 (X0 X) .
In conclusione, grazie alla teoria asintotica che permette di determinare la (21),
possiamo applicare il test sulla media di una v. c. normale standard z quando i dati
sono numerosi e per essi non è possibile sostenere l’ipotesi di normalità degli errori.26
Per quanto si è detto in questo paragrafo:
p
Su
n(β̂i − βi )
=
r
X0 X −1
n ii
β̂i − βi
∼z
q
−1
0
Su (X X)ii
p
25
(25)
p
Se g è una funzione continua che non dipende da n, allora g(x n ) → g(x) se x n → x.
26
D’altra parte è anche ben noto che la variabile casuale t (n) tende velocemente alla v. c. normale
standard all’aumentare di n. Quindi il test sui parametri può essere basato sulla v. c. normale standard
ogni volta che vi è una considerevole numerosità campionaria: prossima o superiore a 100.
9
A0. Il teorema di Frisch-Waugh-Lovell e i valori anomali
Il teorema di Ragnar Frisch, Frederick V. Waugh27 e Michael C. Lovell28 afferma
che ogni regressione lineare può essere condotta in più stadi. La procedura può essere
descritta nel modo seguente: i regressori vengono divisi in due gruppi, si calcola la
regressione della variabile dipendente rispetto al primo gruppo, poi si calcolano le
regressioni del secondo gruppo di variabili esplicative rispetto al primo gruppo di
regressori, si effettua infine la regressione dei residui della prima regressione rispetto
ai residui delle altre regressioni. I parametri ottenuti nell’ultimo stadio di questo
procedimento sono uguali a quelli che si ottengono da un unica regressione condotta
su tutte le variabili esplicative (in un’unica soluzione).29 Il modello di partenza è il
seguente:30
Y = X1 β 1 + X2 β 2 + u
(A0-1)
Sotto la condizione di ortogonalità dei residui rispetto ai regressori (implicita nel
metodo dei minimi quadrati), si possono determinare i parametri β1 , ottenendo:
−1 0
X1 Y −
β1 = (X01 X1 )
−1 0
X1 X2 β 2
(X01 X1 )
(A0-2)
Sostituendo β1 nella (A0-1) e riorganizzando i termini:
−1 0
X1 Y −
Y = X1 (X01 X1 )
−1 0
X1 ]Y =
[I − X1 (X01 X1 )
−1 0
X1 ],
Posto MX 1 = [I − X1 (X01 X1 )
−1 0
X1 X2 β 2 +
X1 (X01 X1 )
X2 β 2 + u
−1 0
X1 ]X2 β2 +
[I − X1 (X01 X1 )
u
(A0-3)
(A0-4)
la (A0-4) può essere riscritta in sintesi:
M X 1 Y = M X 1 X2 β 2 + u
(A0-5)
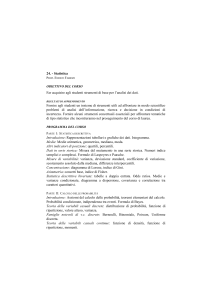
Teorema FWL: I parametri β2 e i residui u ottenuti da quest’ultima equazione di regressione
sono identici a quelli prodotti dal modello espresso dall’equazione (A0-1). La figura 1
illustra l’interpretazione grafica del teorema in uno spazio a tre dimensioni.
Per giungere alla dimostrazione del teorema basta notare che la retta passante
per r2 è parallela alla perpendicolare a X 1 passante per X 2 e che le parallele passanti
per a1 , a2 e X 1 individuano dei segmenti corrispondenti e proporzionali (in base al
teorema di Talete) sulle rette passanti per r1 e r2 . Quindi, l’univocità di β2 è garantita
dalla corrispondenza tra le proiezioni di Y lungo le rette per r1 e r2 . Naturalmente, i
residui sono individuati, in ogni caso, dalla perpendicolare rispetto al piano generato
da X 1 e X 2 passante per Y .31
Un’applicazione del teorema FWL è costituita dall’analisi dell’influenza dei cosiddetti
valori anomali sulla regressione. Si tratta di punti (o osservazioni) lontani dalla
funzione di regressione lineare. Tale distanza è valutata in un duplice senso: verticale
(gli outliers) e orizzontale (i punti di leverage). La combinazione di queste due distanze
27
Frisch e Waugh (1956).
Lovell (1963).
29
Anche i residui sono gli stessi.
30
Rispetto alla simbologia utilizzata in precedenza, con u indichiamo ancora i residui mentre β rappresenta il vettore dei parametri stimati. Il simbolo Y identifica ancora la cosiddetta variabile dipendente
e X sono sempre le variabili esplicative o regressori (compresa la costante).
31
Vedi Davidson e MacKinnon (2003).
28
10
Y
r2
X2
r1
a2
a1
0
X1
figura 1: Il teorema FWL in uno spazio a tre dimensioni
determina l’influenza del punto preso in considerazione sulla pendenza della funzione
di regressione lineare. Indicando con ξ i residui di una generica regressione:
Y = Xβ + ξ
(A0-6)
introduciamo una variabile (vettore colonna) dummy ẽ che assume valore 1 in corrispondenza dell’osservazione per la quale si vuole valutare l’influenza e ha tutte le altre
componenti uguali a zero. Questa operazione comporta una variazione dei parametri
(da β a β̃) e l’equazione (A0-6) diventa:
Y = Xβ̃ + ẽα + u
(A0-7)
Per misurare la differenza (β − β̃), premoltiplichiamo la precedente equazione per HX
(ricordando che per definizione Ŷ = HX Y = Xβ, che HX X = X0 HX = X e che i residui u
sono ortogonali sia a X, sia a ẽ); abbiamo i seguenti ovvi passaggi:
Xβ = Xβ̃ + αHX ẽ
(A0-8)
X(β − β̃) = αHX ẽ
(A0-9)
0
0
X X(β − β̃) = αX HX ẽ
−1 0
β − β̃ = α(X0 X)
X ẽ
(A0-10)
(A0-11)
Grazie al teorema FWL, considerato che MX X = 0 e che ẽ0 u = 0, possiamo sviluppare
l’equazione (A0-7) nel modo seguente:
MX Y = αMX ẽ + u
11
(A0-12)
α=
ẽ0 MX Y = αẽ0 MX ẽ + ẽ0 u
(A0-13)
ẽ0 MX Y = αẽ0 MX ẽ
(A0-14)
ẽ0 MX Y
ẽ0 MX Y
ũ
=
=
0
0
ẽ MX ẽ
ẽ [I − HX ]ẽ
1 − h̃
(A0-15)
Nell’ultima espressione, ũ e h̃ indicano rispettivamente la componente del vettore dei
residui u e l’elemento diagonale della matrice HX corrispondenti all’osservazione della
quale si vuole misurare l’influenza. Determinato il valore del parametro α, possiamo
sostituirlo nell’equazione (A0-11), ottenendo:
β − β̃ =
ũ
1 − h̃
−1 0
(X0 X)
X ẽ
(A0-16)
La (A0-16) mostra che l’effetto dell’osservazione presa in esame è tanto più grande
quanto maggiore è ũ e quanto più elevato è h̃. Quest’ultimo valore, infatti, appartiene
all’intervallo [0,1], in quanto è pari al quadrato della proiezione di ẽ (un vettore
di norma unitaria) sul sottospazio generato dalle colonne di X. In altri termini, per
l’idempotenza di HX :
h̃ = ẽ0 HX ẽ = ẽ0 HX HX ẽ = kHX ẽk2
(A0-17)
In realtà h̃ non può essere minore di 1/n (dove n è la numerosità delle osservazioni).
Se la matrice dei regressori fosse costituita dalla sola costante con tutte le componenti
uguali a 1, indicando con H1 la matrice delle proiezioni, avremo:
1
= kH1 ẽk2
n
(A0-18)
ma se oltre alla costante vi sono altri regressori, avremo H1 HX = HX H1 = H1 , perché
il vettore costante appartiene a X, e quindi:
1
= kH1 ẽk2 = kH1 HX ẽk2 ≤ kHX ẽk2
n
(A0-19)
La proiezione di ẽ su X non può essere in modulo minore della proiezione di ẽ sul
vettore con tutte le componenti pari a 1 (dato che questo vettore è una colonna della
matrice X; infatti, la proiezione ortogonale di un qualunque punto P su una retta r non
può essere maggiore della proiezione dello stesso punto su un sottospazio che contiene
la retta, in quanto la proiezione ortogonale del punto P sulla retta r non è altro che la
proiezione ortogonale sulla retta del punto del sottospazio, contenente la retta, che
è proiezione del punto P sul sottospazio al quale appartiene la retta; in un triangolo
rettangolo ogni cateto non può avere lunghezza maggiore dell’ipotenusa). Inoltre, il
valore medio dei termini diagonali di HX è k/n, poiché vi sono n termini diagonali e la
traccia di HX è pari al numero k dei regressori. I valori h̃ tendono ad essere sempre più
elevati via via che le componenti dei regressori si allontanano dalle rispettive medie
(generando l’effetto leverage). Premoltiplicando la (A0-16) per ẽ0 X, abbiamo:
ũ 0
h̃
0
0 −1 0
ẽ X(X X) X ẽ =
ẽ X(β − β̃) =
ũ
(A0-20)
1 − h̃
1 − h̃
tale valore è l’effetto sulla stima dell’elemento di Y individuato dalla componente di ẽ
diversa da zero. Posto Ỹ = Xβ̃, dall’equazione (A0-9), premoltiplicando ambo i membri
12
per se stessi, dividendo per kSu2 e tenendo conto della (A0-15), si ottiene la distanza di
Cook:32
2
(Ŷ − Ỹ)0 (Ŷ − Ỹ) k(Ŷ − Ỹ)k
α2 0
h̃ũ2
=
=
ẽ
H
ẽ
=
X
2
kSu2
kSu2
kSu2
kSu2 (1 − h̃)
(A0-21)
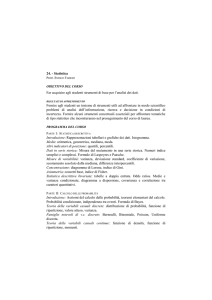
Nella figura 2 è riportata una simulazione del modello:
y = β0 + β1 x + u
1
2
3
4
5
0
2
4
6
8
10
0
6
2
4
1
6
8
10
6
8
10
∆β1
Cook’s distance
2
3
4
5
∆β0
6
3
6
21
45
0
2
4
6
8
10
0
2
4
figura 2: Distanza di Cook
Il primo grafico rappresenta le 100 osservazioni (con x in ascissa e y in ordinata) e
la retta di regressione. Il secondo grafico, a destra, riporta la relazione tra x (in ascissa)
Pn
32
u2
(Y−Ŷ)0 (Y−Ŷ)
i=1 i
Con Su2 si è indicata la varianza dei residui della regressione: Su2 = n−k
=
. V.: Weisberg
n−k
ũ
p
(2005) e anche Belsey et al. (1980). Ogni valore ũs =
è detto residuo studentizzato, con questa
notazione la (A0-21) può scriversi come
h̃ũ2s
k(1−h̃)
=
Su 1−h̃
ũ2s h̃
k 1−h̃ = outlier × leverage = influence.
13
e h̃ (in ordinata). La linea orizzontale continua indica il valore medio h = k/n = 2/100,
la linea tratteggiata corrisponde al doppio di tale media. Il grafico illustra l’effetto
leverage esercitato da ogni x: valori più distanti dalla media x (corrispondente alla
linea verticale) causano un valore più elevato di h̃ (i primi 6 valori sono numerati).
Nel grafico in basso a sinistra sono riportati in ordinata i valori che risultano dalla
formula (A0-21) per ogni osservazione (x è riportato in ascissa come negli altri grafici
e la linea orizzontale tratteggiata corrisponde al valore 4/n). Dal grafico si può notare
come i valori che influiscono di più sulla stima di y (con maggiore ordinata) non siano
in generale tutti quelli con un più alto leverage. Il valore di ũ (l’eventuale condizione
di outlier), infatti, modifica l’effetto sintetizzato da h̃ (leverage). L’ultimo grafico, in
basso a destra, riporta l’equazione (A0-16) per entrambi i parametri del modello. Si
può notare come gli effetti siano differenziati per i diversi parametri.
A1. Medie e varianze condizionate
La variabile casuale doppia (X,Y) ha la seguente distribuzione di probabilità:
Definizioni di probabilità
marginali e probabilità congiunta
Probabilità marginali
e Probabilità congiunta
pX i = pX i ,Y1 + pX i ,Y2
Y
X
X1
X2
Y1
Y2
pX 1 ,Y1
pX 2 ,Y1
pY1
pX 1 ,Y2
pX 2 ,Y2
pY2
pY j = pX 1 ,Y j + pX 2 ,Y j
pX 1
pX 2
1
pX i ,Y j = P(X i ∩ Y j )
Le distribuzioni di probabilità marginali (pX 1 ,pX 2 ) e (pY1 ,pY2 ), rispettivamente nell’ultima riga e nell’ultima colonna della tabella, sono date dalla somma delle probabilità
congiunte (pX i ,Y j ).
Consideriamo ora le variabili casuali condizionate, del tipo (X|Yi ), e le loro distribuzioni di probabilità pX|Y j = P(X|Y j ). Data la definizione di probabilità congiunta:
pX i ,Y j = P(X i ∩ Y j ) = pX i P(Y j |X i ) = pX j pYi |X j = pY j P(X i |Y j ) = pY j pX j |Yi
(A1-1)
avremo le seguenti probabilità condizionate:
pX i |Y j =
pX i ,Y j
pY j |X i =
pY j
pX i ,Y j
pX i
e il riepilogo dettagliato riportato nelle seguenti tabelle:
Probabilità condizionate di X
Y
Y1
Y2
X 1 pX 1 |Y1 pX 1 |Y2
X
X 2 pX 2 |Y1 pX 2 |Y2
1
1
Probabilità condizionate di Y
Y
Y1
Y2
X 1 pY1 |X 1 pY2 |X 1
1
X
X 2 pY1 |X 2 pY2 |X 2
1
14
(A1-2)
Utilizzando le probabilità condizionate si possono calcolare i valori medi condizionati di X e Y:
E[X|Y1 ] =
E[X|Y2 ] =
E[Y|X 1 ] =
E[Y|X 2 ] =
pX 1 ,Y1
pY1
pX 1 ,Y2
pY2
pX 1 ,Y1
pX 1
pX 2 ,Y1
pX 2
X1 +
X1 +
Y1 +
Y1 +
pX 2 ,Y1
pY1
pX 2 ,Y2
pY2
pX 1 ,Y2
pX 1
pX 2 ,Y2
pX 2
X 2 = pX 1 |Y1 X 1 + pX 2 |Y1 X 2
X 2 = pX 1 |Y2 X 1 + pX 2 |Y2 X 2
Y2 = pY1 |X 1 Y1 + pY2 |X 1 Y2
Y2 = pY1 |X 2 Y1 + pY2 |X 2 Y2
Calcolando le medie delle medie condizionate, si dimostra che vale la legge delle
aspettative iterate (LIE, law of iterated expectations). Con riferimento alle precedenti
due tabelle, tenuto conto delle identità (A1-2), (posto E[X|Y] = (E[X|Y1 ], E[X|Y2 ]) e
E[Y|X] = (E[Y|X 1 ], E[Y|X 2 ])), calcoliamo:
EY [E[X|Y]] = pY1 E[X|Y1 ] + pY2 E[X|Y2 ]
= pY1 pX 1 |Y1 X 1 + pX 2 |Y1 X 2 + pY2 pX 1 |Y2 X 1 + pX 2 |Y2 X 2
= pX 1 ,Y1 X 1 + pX 2 ,Y1 X 2 + pX 1 ,Y2 X 1 + pX 2 ,Y2 X 2
= pX 1 X 1 + pX 2 X 2 = E[X]
(A1-3)
EX [E[Y|X]] = pX 1 E[Y|X 1 ] + pX 2 E[Y|X 2 ]
= pX 1 pY1 |X 1 Y1 + pY2 |X 1 Y2 + pX 2 pY1 |X 2 Y1 + pY2 |X 2 Y2
= pX 1 ,Y1 Y1 + pX 2 ,Y1 Y2 + pX 1 ,Y2 Y1 + pX 2 ,Y2 Y2
= pY1 Y1 + pY2 Y2 = E[Y]
(A1-4)
In definitiva, la media delle medie condizionate EY [E[X|Y]] è uguale alla media non
condizionata E[X]. Ogni realizzazione della variabile casuale media condizionata
E[X|Yi ] è funzione di Yi (la media condizionata varia al variare di Yi , per = 1,..., n e
viene detta funzione di regressione). La variabile casuale media condizionata E[X|Y],
quindi, eredita la propria distribuzione da quella della variabile casuale condizionante
Y e lo stesso vale anche per la media
di ogni funzione deterministica di X.
condizionata
2
Pertanto, avremo, ad esempio, EY E[X |Y] = E[X2 ].
Il risultato della (A1-3) può essere utilizzato per scomporre la varianza della variabile X nella somma della varianza (condizionata) della funzione di regressione e della
varianza (condizionata) dei residui di X rispetto alla funzione di regressione.
Premesso che la varianza può essere sempre espressa come differenza tra la media
dei quadrati e il quadrato della media, per una generica variabile casuale Z:
Var[Z] = E (Z − E[Z])2 = E Z 2 + (E[Z])2 − 2Z E[Z] = E Z 2 − (E[Z])2 (A1-5)
calcoliamo il valore atteso della varianza condizionata di X rispetto a Y:
EY [VarY [X|Y]] = EY E[X2 |Y] − (E[X|Y])2
= EY E[X2 |Y] − EY (E[X|Y])2
15
Sommando e sottraendo (E[X])2 (ricordando la (A1-3) e che EY E[X2 |Y] = E[X2 ]):
EY [VarY [X|Y]] = E[X2 ] − EY (E[X|Y])2 − (E[X])2 + (E[X])2
= E[X2 ] − (E[X])2 − EY (E[X|Y])2 − (EY [E[X|Y]])2
applicando la (A1-5) possiamo scrivere:
EY [VarY [X|Y]] = Var[X] − VarY [E[X|Y]]
e infine otteniamo:
Var[X] = VarY [E[X|Y]] + EY [VarY [X|Y]]
(A1-6)
Quindi, la varianza di X, Var[X], è data dalla somma della varianza condizionata
della funzione di regressione VarY [E[X|Y]] e della media condizionata delle varianze di X rispetto alla funzione di regressione EY [VarY [X|Y]]. Questo risultato resta
così dimostrato in termini generali, ma, per fissare le idee, proviamo ad applicarlo
all’esemplificazione riportata nelle tabelle precedenti, utilizzate nel calcolo dei valori
attesi condizionati espressi dalla (A1-3) e dalla (A1-4). Siamo condotti alla seguente
esemplificazione dei termini della (A1-6):
VarY [E[X|Y]] = EY (E[X|Y])2 − (EY [E[X|Y]])2 =
= pY1 (E[X|Y1 ])2 + pY2 (E[X|Y2 ])2 − (E[X])2
(A1-7)
EY [VarY [X|Y]] =pY1 VarY1 [X|Y1 ] + pY2 VarY2 [X|Y2 ] =
=pY1 pX 1 |Y1 (X 1 − E[X|Y1 ])2 + pX 2 |Y1 (X 2 − E[X|Y1 ])2 +
pY2 pX 1 |Y2 (X 1 − E[X|Y2 ])2 + pX 2 |Y2 (X 2 − E[X|Y2 ])2 =
=pX 1 ,Y1 (X 1 − E[X|Y1 ])2 + pX 2 ,Y1 (X 2 − E[X|Y1 ])2 +
pX 1 ,Y2 (X 1 − E[X|Y2 ])2 + pX 2 ,Y2 (X 2 − E[X|Y2 ])2 =
=pX 1 ,Y1 X 1 2 + (E[X|Y1 ])2 − 2X 1 E[X|Y1 ] +
pX 2 ,Y1 X 2 2 + (E[X|Y1 ])2 − 2X 2 E[X|Y1 ] +
pX 1 ,Y2 X 1 2 + (E[X|Y2 ])2 − 2X 1 E[X|Y2 ] +
pX 2 ,Y2 X 2 2 + (E[X|Y2 ])2 − 2X 2 E[X|Y2 ] =
=E[X2 ] + pY1 (E[X|Y1 ])2 + pY2 (E[X|Y2 ])2 − 2EY (E[X|Y])2
(A1-8)
Sommando la (A1-7) e la (A1-8): VarY [E[X|Y]] + EY [VarY [X|Y]] = E[X2 ] − (E[X])2 =
Var[X].
A2. Indipendenza tra trasformazioni di vettori di v. c. normali
Sia z un vettore ad n componenti di variabili casuali normali standardizzate e
incorrelate (quindi indipendenti) e sia q(z) una forma quadratica con argomento z:
q(z) = z0 Az
z ∼ N(0,I)
16
(A2-1)
dove A è una matrice simmetrica n × n. Dal teorema spettrale33 sappiamo che A è
diagonalizzabile mediante una similitudine ortogonale. Sia C la matrice ortogonale
(C0 C = I) che realizza la diagonalizzazione di A:34
C0 AC = L
⇐⇒
A = CLC0
(A2-2)
dove L è la matrice diagonale degli autovalori {λi } di A.35 Sostituendo A con CLC0
nella definizione di q(z):
q(z) = z0 CLC0 z
(A2-3)
Definito il vettore y = C0 z, abbiamo:
E[y] = C0 E[z] = 0
Var[y] = C0 Var[z]C = C0 IC = I
y ∼ N(0,I)
(A2-4)
Quindi, la forma quadratica q(z) può essere rappresentata nel modo seguente:
0
q(z) = y Ly =
n
X
λi yi2
(A2-5)
i=1
Se la matrice A, associata a q(z), è anche idempotente (oltre che simmetrica), i suoi
autovalori possono assumere solo i valori 1 o 0; in questo caso, grazie alla (A2-5),
possiamo stabilire che:36
0
0
q(z) = z Az = y Ly =
n−k
X
2
y 2j ∼ χ(n−k)
(A2-6)
j=1
dove j indicizza gli n − k autovalori non nulli di A che compongono ordinatamente la
diagonale di L. In particolare, se la matrice associata alla forma quadratica qA(z) = z0 Az
ha rango pari a n (essendo A simmetrica ed idempotente: A = I), avremo:
2
q(z) = z0 Az ∼ χ(n)
(A2-7)
Siano qA(z) = z0 Az e qB (z) = z0 Bz due forme quadratiche idempotenti, esse sono
indipendenti solo se AB = 0.37 Infatti, posto yA = Az e yB = Bz, risulta qA(z) = yA0 yA
e qB (z) = yB 0 yB (per la simmetria e l’idempotenza di A e B). Queste due funzioni,
rispettivamente di yA e yB , sono indipendenti solo se sono indipendenti yA e yB . In altri
termini, dato che E[yA] = 0 e E[yB ] = 0, la matrice delle covarianze deve soddisfare
la condizione E[yAyB 0 ] = 0. Ma: E[yAyB 0 ] = E[Azz0 B0 ] = AE[zz0 ]B0 = AIB0 = AB = 0.
Questo risultato permette di stabilire l’indipendenza tra numeratore e denominatore
della definizione della v. c. F di Fisher-Snedecor e della v. c. t di Student.38
33
Lang (1984, p. 245).
Le colonne della matrice C costituiscono una base ortonormale dello spazio Rn .
35
Per costruzione le matrici A e L hanno:
· gli stessi autovalori e, quindi,
· la stessa traccia (pari alla somma degli autovalori),
· lo stesso determinante (pari al prodotto degli autovalori),
· lo stesso rango (pari al numero degli autovalori non nulli).
36
V. nota 10 e Piccolo (1998, p. 508).
37
Questa affermazione è nota come teorema di Craig e consente di dimostrare che media e varianza di
un campione casuale estratto dal una v. c. normale sono tra loro indipendenti (e viceversa, se media
e varianza campionarie sono indipendenti allora il campione è estratto da una popolazione che si
distribuisce in modo normale) Piccolo (1998, p. 508).
38
Riguardo alla v. c. t di Student, la forma lineare Bz e la forma quadratica z0 Az sono indipendenti solo
se AB = 0. La dimostrazione si ottine allo stesso modo di quella fornita per due forme quadratiche.
34
17
A3. Indice di condizionamento
Dal punto di visto operativo, il calcolo dei parametri β̂ richiede l’inversione della
matrice X0 X, come mostrato dalla (3). Il punto è che la “precisione” dell’operazione di
inversione di una matrice, su qualunque calcolatore, è segnata dai limiti posti dalla
precisione di macchina. Pertanto, quando una matrice è quasi-singolare (cioè non molto
diversa da una matrice singolare), l’approssimazione per mezzo dei numeri di macchina
dei risultati nelle varie fasi della procedura di calcolo dell’inversa può generare un
output molto diverso da quella che è la determinazione "esatta".39 Questo tipo di
errore, che non è contemplato dalla struttura probabilistica del modello di regressione
lineare, determina la differnza tra la determinazione esatta di β̂ e quella ottenuta dai
calcoli β̂ ∗ . In termini percentuali, possiamo esprimere tale differenza come:
e=
||β̂ ∗ − β̂||
(A3-1)
||β̂||
Considerando le condizioni più semplici possibili, per misurare e, posto A = X0 X e
c = X0 Y, introduciamo una perturbazione nella variabile Y (diciamo δY, cosi che
δc = X0 δY) per la quale, mentre si intende risolvere il sistema Aβ̂ = c, in realtà il
calcolatore risolve il sistema Aβˆ∗ = c + δc. Essendo β̂ = A−1 c e βˆ∗ = A−1 c + A−1 δc,
avremo:
e=
||β̂ ∗ − β̂||
||β̂||
=
||A−1 δc||
||A−1 c||
(A3-2)
Il massimo valore del numeratore ||A−1 δc|| può essere determinato considerando che
la matrice A, di dimensione k × k, è simmetrica e definita positiva e che, pertanto, può
essere diagonalizzata (come nel paragrafo precedente) mediante una base ortonormale
di vettori vi che generano Rk . Ogni vettore s ∈ Rk può essere rappresentato come
combinazione lineare dei vettori vi mediante opportuni ed univoci coefficienti t i ,
Pk
ottenendo: s = i=1 t i vi . Visto che ogni vi è un autovettore di A (per cui Avi = λi vi ),
che vi 0 vi = 1 e vi 0 v j6=i = 0, abbiamo:
||As||2 = (As)0 As =
k
X
0
t i Avi
k
X
i=1
=
k
X
t i λi vi 0
i=1
Essendo ||s||2 =
Pk
i=1 t i
2
2
t i Avi
i=1
k
X
t i λi vi =
k
X
i=1
t i 2 λi 2
(A3-3)
i=1
, indicando con λmax il massimo autovalore di A, abbiamo:
||As|| =
k
X
t i 2 λi 2 ≤ λmax 2 ||s||2 ⇔ ||As|| ≤ λmax ||s||
(A3-4)
i=1
Siccome la matrice A−1 è anch’essa simmetrica definita positiva e ha come spettro i
reciproci degli autovalori di A, analogamente alla (A3-4):
||A−1 s|| ≤
39
1
λmin
||s||
(A3-5)
l’indice Variance inflation factor può essere utilizzato per misurare l’effetto della collinearità sulla stima
dei parametri. Greene (2012).
18
Quindi, per il numeratore della (A3-2) abbiamo ||A−1 δc|| ≤
e=
||β̂ ∗ − β̂||
||β̂||
≤
||δc||
λmin
1 ||δc||
||β̂ ∗ − β̂||
||β̂||
≤
(A3-6)
λmin ||β̂||
Il minimo valore del denominatore della (A3-2) sarà dato da
quindi, sostituendolo nella (A3-6), abbiamo:
e=
e, sostituendo:
||c||
λmax
≤ ||A−1 c|| = ||β̂|| e,
λmax ||δc||
λmin ||c||
(A3-7)
λ
L’indice di condizionamento λmax esprime il rapporto massimo possibile tra l’errore
min
relativo iniziale sui dati (rappresentati mediante numeri di macchina) e l’errore relativo finale commesso sui risultati (anche questi espressi in numeri di macchina). Il
valore ideale minimo dell’indice di condizionamento è 1, al suo aumentare i risultati
dell’elaborazione sono sempre meno accurati e se tende all’infinito l’elaborazione è
impossibile (la matrice A è singolare). Il reciproco dell’indice di condizionamento,
quindi, rappresenta, in termini relativi, la distanza della matrice A dalla matrice singolare ad essa più vicina, una distanza che va da 0 (se A è singolare) a 1 (nessun errore
λ
nell’elaborazione). L’indice λmax può essere interpretato come l’elasticità massima (o
min
massima reattività) dell’errore nei risultati rispetto agli errori in fase di immissione (e
in qualunque altra fase dell’elaborazione) dei dati.
Questi risultati possono essere generalizzati in vari modi, ad esempio considerando
perturbazioni anche nella matrice A, oltre che nel vettore c, oppure analizzando il
caso delle matrici non simmetriche, ottenendo, ovviamente, per il calcolo dell’indice,
formule diverse dalla precedente.40
A4. Intervallo di previsione
Date le ipotesi del teorema di Gauss-Markov, Ŷi = xi β̂ è la stima BLUE di EX [Yi |xi ] =
xi β, l’ampiezza dell’intervallo nel quale ricade l’errore di previsione della funzione
di regressione può essere stimata utilizzando la varianza campionaria del residuo
ui = Ŷi − Yi = xi (β̂ − β) + εi :
0
VarX [ui |X ] = E xi (β̂ − β) + εi xi (β̂ − β) + εi
−1
= σ2 1 + xi (X0 X) xi 0
(A4-1)
−1
Quindi Su2 = Su2 (1 + xi (X0 X)
i
xi 0 ).
Se accettiamo anche l’ipotesi di normalità degli errori, abbiamo che
Pertanto l’intervallo di previsione di Yi sarà dato da:
q
Ŷi ± t (n−k,1−α/2) Sui = Ŷi ± t (n−k,1−α/2) Su (1 + xi (X0 X)−1 xi 0 )
Yi −Ŷi
Sui
∼ t (n−k) .
(A4-2)
dove α ∈ [0,1] è un opportuno livello di fiducia assegnato. Nell’approccio della teoria
asintotica la v. c. di riferimento non sarà più la t ma la z.
40
Nell’esposizione si è seguito Quarteroni e Saleri (2006, pp. 134 e ss), per una trattazione generale
dell’indice di condizionamento Murli (2007, pp. 221 e ss.).
19
Se si vuole determinare l’ampiezza dell’intervallo di confidenza per l’errore che
si commette prevedendo Yi con il suo valore medio E[Yi |xi ], allora Su2 deve essere
i
−1
Su2 (xi (X0 X) xi 0 )
stimato con
(poiché il valore atteso di εi è zero). Questo l’intervallo
di confidenza sarà molto meno ampio rispetto a quello determinato con la (A4-2).
A5. Trasformazione di Box e Cox
Talvolta è possibile applicare una opportuna trasformazione alla variabile y per
fare in modo di ricondurla alla “normalità” quando questa condizione non è soddisfatta.
La trasformazione di Box e Cox (1964) può essere impiegata a questo fine, essa ha il
vantaggio di richiedere la stima di un unico parametro aggiuntivo λ. Poniamo che la
variabile yλ ( y), trasformata della y, abbia una distribuzione normale e indichiamo
con f ( yλ ) la sua funzione di densità di probabilità (la pdf, cosi che F ( yλ ) è la sua
primitiva, la cdf), allora avremo che (considerando la funzione composta F ( yλ ( y)))
dy
la funzione di densità di y sarà data da f ( yλ ) d yλ . In pratica la trasformazione in
y λ −1
questione è yλ = λ ma se λ = 0 allora si pone yλ = ln( y) (che è il limite per λ → 0
della trasformazione originaria). Con questo accorgimento la trasformazione è definita
su tutto l’asse reale rispetto a λ ma solo per valori non negativi di y. Si tratta, quindi,
di rendere massima la verosimiglianza rispetto al fatto che il campione sia stato estratto
da una popolazione (rappresentata da yλ ) distribuita in modo normale. La funzione di
verosimiglianza è la seguente:
L (λ) =
n
Y
f ( yi ) =
i=1
=
n
Y
n
Y
f ( yλ i )
i=1
f
( yλ i ) yiλ−1
d yλi
d yi
= (2πσλ2 )
−n
2
e
−
Pn
i=1
( yλi −µλ )2
2σ2
λ
n
Y
yiλ−1
(A5-1)
i=1
i=1
e passando al logaritmo:
n
n
2
X
n log 2π n log σλ X ( yλi − µλ )2
l o g L (λ) = −
−
−
+ (λ − 1)
log yi
2
2
2σλ2
i=1
i=1
(A5-2)
raggruppando i termini costati in C, bisogna risolvere il problema:
n
n
X
X
1
2
max log L (λ) = C − log
( yλi − µλ ) + (λ − 1)
log yi
λ
2
i=1
i=1
(A5-3)
per determinare il valore di λ.
A6. Test di Wald
Cosideriamo due modelli econometrici: un modello ristretto con m regressori è
un modello completo con k > m regressori. Nei due modelli la variabile dipendente Y
è la stessa e i primi m regressori sono gli stessi. Date le caratteristiche geometriche
dei minimi quadrati, il modello ristretto produce dei residui che hanno una maggiore
varianza rispetto al modello completo. Il test di Wald si pone l’obiettivo di verificare il
potere esplicativo dei k − m regressori aggiunti nel modello completo rispetto a quello
20
ristretto. Il test è quindi basato sul confronto tra le varianze dei residui dei due modelli.
Se i k − m regressori aggiunti nel modello completo hanno un buon potere esplicativo
nei confronti della variabile Y , allora la varianza dei residui u del modello completo
deve essere significativamente inferiore alla varianza dei residui u∗ prodotti dal modello
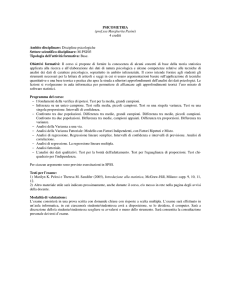
ristretto. Il grafico della figura 3 (nel quale z = Y e y è il regressore aggiunto) illustra
il significato geometrico di queste proposizioni:
z
u
u*
y
Hz
x
figura 3: Test di Wald
In formule:41
u∗ = Y − Xβ∗ = Y − Xβ∗ + Xβ − Xβ = Y − Xβ + X(β − β∗ ) = u + X(β − β∗ )
u∗ 0 u∗ = u0 u + (β − β∗ )0 X0 X(β − β∗ ) ≥ u0 u
perché il doppio prodotto u0 X(β − β∗ ) è nullo e
u∗ 0 u∗ − u0 u = (β − β∗ )0 X0 X(β − β∗ ) = ||X(β − β∗ )||2 ≥ 0
(A6-1)
Sotto l’ipotesi H0 che le varianze di u∗ e u siano uguali, considerato che lo stimatore
al primo membro della (A6-1) (diviso per σ2 ) si distribuisce come una v. c. χ 2 che
ha (n − m) − (n − k) = k − m gradi di libertà42 e che lo stimatore u0 u (diviso per σ2 ) si
distribuisce come una variabile casuale χ 2 con n − k gradi di libertà, trattandosi di due
stimatori indipendenti, una volta divisi entrambi per i rispettivi gradi di libertà, il loro
rapporto si distribuisce come una v. c. F di Fisher-Snedecor con k − m e n − k gradi di
libertà:43
u∗ 0 u∗ −u0 u
k−m
u0 u
n−k
∼ F(k−m,n−k)
41
(A6-2)
Ancora una volta, per non appesantire la notazione, indichiamo con β i parametri stimati e non le v. c.
da cui sono generati.
42
Per il teorema di Fisher e Cochran, v. Piccolo (1998, p. 508),
43
Per la dimostrazione di queste affermazioni v. Piccolo (1998, pp. 507 e ss.). Il test di Wald può essere
costruito con il metodo del rapporto di verosimiglianza, v. Piccolo (1998, pp. 639 e ss.).
21
Utilizziamo le seguenti uguaglianze per definire una misura del fitting della regressione:
l’indice di determinazione, indicato con R2 :=
Y = Xβ:45
(Ŷ−Y)0 (Ŷ−Y) 44
.
(Y−Y)0 (Y−Y)
Ricordando che Ŷ = Xβ e
Y − Y = (X − X)β + u
(Y − Y)0 (Y − Y) = β 0 (X − X)0 (X − X)β + u0 u = (Ŷ − Y)0 (Ŷ − Y) + u0 u
(Ŷ − Y)0 (Ŷ − Y)
(Y − Y)0 (Y − Y)
u0 u
(Y − Y)0 (Y − Y)
+
u0 u
(Y − Y)0 (Y − Y)
=1
= 1 − R2
(A6-3)
Dividendo numeratore e denominatore della (A6-2) per (Y − Y)0 (Y − Y), possiamo
verificare la seguente uguaglianza:
u0∗ u∗ −u0 u
k−m
u0 u
n−k
=
(R2 − R2∗ )/(k − m)
(1 − R2 )/(n − k)
∼ F(k−m,n−k)
(A6-4)
dove R2∗ è l’R-quadro (l’indice di determinazione) del modello ristretto.
Se consideriamo il modello ristretto con la sola costante (l’intercetta verticale), per
qualunque modello completo con k > 1 regressori, la (A6-4) diventa:46
(Ŷ−Y)0 (Ŷ−Y)
k−1
u0 u
n−k
=
R2 /(k − 1)
∼ F(k−1,n−k)
(1 − R2 )/(n − k)
(A6-5)
Infatti, nel modello restretto (con la sola intercetta verticale) l’indice R2∗ è pari a zero.
In questo caso il test di Wald consente di esprimere un giudizio statistico complessivo
su tutti i parametri del modello di regressione (escluso β0 ). Naturalmente, se k = 2,
questo test produce gli stessi risultati del test t condotto sotto l’ipotesi H0 che β1 sia
2
nullo. In generale F(1,n−2) = t (n−2)
, ma si può anche verificare che, per il modello di
regressione semplice (con soli due parametri), la statistica al primo membro della
(A6-5) è pari al quadrato della statistica che compare al primo membro della (19).
44
Questa definizione dell’R2 è frutto della scomposizione della devianza totale della Y nella somma della
devianza della stima Ŷ e della devianza dei residui u e non rispetta il criterio generale di parsimonia
che dovrebbe sovrintendere alla specificazione del modello di regressione. Una misura corretta, per
tener conto della perdita di gradi di libertà all’aumentare del numero dei regressori, è data dall’indice
S2
di determinazione corretto R2c = 1 − S 2u . Altre misure di fitting proposte per selezionare la migliore
Y
specificazione del modello sono l’Akaike Information Criterion (AIC), il Bayesian Information Criterion
(BIC) e il Criterio di Schwarz. In ogni caso questi indici cercano di coniugare l’obiettivo di ridurre la
varianza dei residui con la necessità di rendere semplice il percorso esplicativo che mira ad interpretare
la variabile dipendente, riducendo al minimo il numero di regressori (si tratta, in ogni caso, di proporre
una soluzione accettabile al trade-off che sussite tra questi due obiettivi).
45
I simboli Y e X indicano rispettivamente la media campionaria di Y e il vettore riga delle medie
campionarie delle colonne della matrice X.
46
Siccome in questo caso u0∗ u∗ = (Y − Y)0 (Y − Y), dal secondo passaggio della (A6-3) segue che:
u0∗ u∗ − u0 u = (Y − Y)0 (Y − Y) − u0 u = (Ŷ − Y)0 (Ŷ − Y)
22
Una ulteriore applicazione del test di Wald è il test di Chow per il confronto di
due identici modelli definiti su set di dati alternativi e tra loro indipendenti. L’ipotesi
H0 è che i due modelli presentano gli stessi coefficienti contro l’ipotesi alternativa
che i coefficienti sono diversi. Il test di Chow può essere impiegato per verificare la
stabilità strutturale del modello (che consegue all’accettazione di H0), oppure per
individuare un break strutturale verificatosi nel tempo o per quantificare l’impatto di un
trattamento (ad esempio un intervento di policy) sulla variabile dipendente (in questi
due casi l’ipotesi statistica è confermata se si rifiuta H0). Il modello vincolato stima i
parametri sulla totalità delle osservazioni (producendo, così, una maggiore devianza
dei residui u∗ ). Il modello non vincolato stima gli stessi parametri su dei sottoinsiemi di
dati (tipicamente ripartiti in due sottoinsiemi). La devianza dei residui del modello non
vincolato u0 u = u1 0 u1 + u2 0 u2 è minore di quella del modello vincolato per costruzione
ed è ottenuta come somma dei residui stimati nei diversi sottoinsiemi nei quali è
stato diviso il campione. Supponendo che i dati costituiti da n osservazioni siano stati
ripartiti in due sottoinsiemi di numerosità n1 e n2 , con riferimento alla (A6-2), i gradi
di libertà del numeratore saranno dati da (n − k) − [(n1 − k) + (n2 − k)] = k e quelli del
denominatore da (n1 − k) + (n2 − k) = n1 + n2 − 2k = n − 2k:
u∗ 0 u∗ −u0 u
k
u0 u
n−2k
∼ F(k,n−2k)
(A6-6)
A7. Stima numerica di massima verosimiglianza
Sia `(β) il logaritmo della funzione di verosimiglianza L (x;β), la massimizzazione
∂ `(β)
di quest’ultima si effettua risolvendo l’equazione di verosimiglianza ∂ β = 0. Molto
spesso questa equazione non ha una forma risolvibile rispetto a β, allora è necessario
utilizzare dei metodi numerici applicati allo sviluppo in serie di Taylor dell’equazione
di verosimiglianza (nel punto β0 ):
∂ 2 `(β0 )
∂ `(β̂) ∂ `(β0 )
'
+ (β̂ − β0 )
'0
∂β
∂β
∂ β2
2
−1
∂ `(β0 )
∂ `(β0 )
β̂ ' β0 −
2
∂β
∂β
(A7-1)
Quindi, è possibile utilizzare un processo iterativo per trovare la soluzione β̂,
basta sostituire β̂ con βn+1 e β0 con βn ad ogni iterazione fino a quando |βn+1 − βn |
non risulta minore ad un valore piccolo fissato a piacere (eventualmente, il doppio
della precisione di macchina). Tale procedimento è detto metodo di Newton, la sua
f (x)
formulazione generale è: x n+1 = x n − f 0 (x) . La convergenza a β̂ non è sempre garantita,
tutto dipende dalle caratteristiche della funzione di cui bisogna determinare gli zeri.
Non è detto che le derivate prime della funzione f (x) siano esprimibili in forma
analitica, in tal caso è necessario una loro approssimazione (ottenuta calcolando la
pendenza della retta che interseca la f (x) in due punti vicini). In ogni caso il metodo
può fallire per vari motivi.
23
A8. Varianza dei parametri e log-verosimiglianza
R∞
Sia f (x;β) una funzione di densità di probabilità, per definizione −∞ f (x;β)d x =
1 è costante rispetto a β. Quindi, se vi sono le condizioni per applicare il teorema di
Libeniz, differenziando rispetto a β:
∂
∂β
∞
∞
∂f f
f (x;β)d x =
dx =
−∞ ∂ β f
−∞
Z
Z
∞
∂ log f
f dx =
−∞ ∂ β
Z
Z
`0 f = E[`0 ] = 0 (A8-1)
dove ` è la funzione di log-verosimiglianza e `0 è la sua derivata rispetto a β (tale
derivata è detta anche score). La somma delle varianze di ogni componente di `0 (una
per ogni osservazione campionaria) è definita informazione di Fisher ed è indicata con
(nI) := Var[`0 ]. Il valore I indica di quanto varia la pendenza del piano tangente alla
funzione di log-verosimiglianza nell’intorno di β. Quanto maggiore è questa varianza,
tanto più le sezioni superiori di ` saranno “vicine” alla perpendicolare passante per β.
Consideriamo la derivata seconda `00 di ` rispetto a β, per essa si ha:
`00 =
f 00 f − f 0 f 0
f 00
∂ `0
∂ f0
=
=
− (`0 )2
=
∂β ∂β f
f2
f
Prendendo il valore atteso di ambo i membri della (A8-2):
Z 00
Z
0 2
0 2
0 2
f
∂2
00
E[` ] =
f − E (` ) =
f
−
E
(`
)
=
−E
(` ) = −Var[`0 ]
2
f
∂β
(A8-2)
(A8-3)
Quindi: Var[`0 ] = E (`0 )2 = −E[`00 ] (la varianza di `0 è pari all’opposto della matrice
hessiana della funzione di log-verosimiglianza).
Se nella (A7-1) si pone β0 uguale al valore vero di β, allora:
∂ 2 `(β)
β̂ − β = −
∂ β2
−1
∂ `(β)
`0
= − 00
∂β
`
e, moltiplicando ambo i membri della (A8-4) per
naria):
p
p
(A8-4)
n (dove n è la numerosità campio-
−1
`0 n
`0 `00
n(β̂ − β) = − p 00 = − p
n`
n n
(A8-5)
Essendo `0 pari alla sommma di tutte le sue componenti (log f (X i ;β)), per il teorema
0
p 0
limite centrale, la distribuzione del termine p` n = n `n tende ad essere quella di v. c.
normale con media zero è varianza nI: N (0,nI). Per la legge dei grandi numeri il
00
termine `n (pari alla media delle varianze delle singole componenti di `0 ) si approssima
p
a nI all’aumentare di n. Pertanto, n(β̂ − β) tende ad essere distribuito come una
v. c. normale N (0,(nI)−2 (nI)) = N (0,(nI)−1 ). In definitiva, all’aumentare di n, la
distribuzione di β̂ risulta approssimarsi a quella di v. c. normale N (β,(nI)−1 ) dove
(nI)−1 è l’inversa della matrice delle varianze-covarianze dello score (o matrice inversa
dell’informazione di Fisher).47 I termini diagonali della matrice (nI)−1 approssimano
le varianze delle stime dei parametri β̂. La varianza di ogni stimatore non distorto
47
La matrice (nI) è più spesso indicata con I, inglobando il fattore n.
24
ottenuto con il metodo della massima verosimiglianza ha un limite inferiore stabilito
1
1
dalla disuguaglianza di Cramér-Rao: Var[β̂] ≥ (nI)
= Var[`
0 ] . Infatti, per uno stimatore
non distorto:
Z
Z
Z
∂
β̂ f = β ⇒
β̂ f = β̂`0 f = E[β̂`0 ] = 1
(A8-6)
∂β
ricordando che cov[x, y] = E[x y] − E[x]E[ y] e che E(`0 ) = 0, abbiamo:
E[β̂`0 ] = cov[β̂`0 ] = 1
e, per la disuguaglianza di Schwarz:48
2
1 = cov[β̂`0 ] ≤ Var[β̂]Var[`0 ]
che dimostra la disuguaglianza di Cramér-Rao.
I precedenti risultati forniscono fondamento teorico a gran parte della statistica
inferenziale e, in particolare, consentono di capire la logica di uno dei test statistici
più generali, il test del rapporto di verosimiglianza. Tale test è basato sul confronto
di due massimi della funzione di verosimiglianza, il primo relativo ad un modello
ristretto (nel quale, ad esempio, alcuni parametri sono posti pari a zero) e il secondo
relativo ad un modello senza restrizioni (che, ad esempio, include tutti i parametri).
Se la funzione di verosimiglianza del modello ristretto raggiunge un valore massimo
significativamente maggiore del massimo della funzione di verosimiglianza del modello
senza restrizioni, allora non è possibile rifiutare l’ipotesi H0 che il modello ristretto sia
più verosimile del modello senza restrizioni, viceversa è necessario accettare l’ipotesi
alternativa (favorevole al modello con restrizioni) e, quindi, rifiutare H0. Si tratta di
L
prendere una decisione in base al valore assunto dal seguente rapporto: Q = L0 dove la
A
massima verosimiglianza al numeratore è funzione dei parametri del modello ristretto,
mentre quella al denominatore è funzione dei parametri del modello senza restrizioni.
Espandendo in serie di Taylor il logaritmo del numeratore di Q (nell’intorno di βA),
otteniamo:
1
`0 = `A + (β0 − βA)`0 + (β0 − βA)2 `00
2
0
considerato che (data H0) E[` ] = 0 in βA e che, quindi, in tale punto del dominio di
`A, risulta `0 ' 0, possiamo scrivere:
−2logQ = −2(`0 − `A) = −(β0 − βA)2 `00
Dai paragrafi precedenti sappiamo che −`00 ' −E[`00 ] è l’informazione di Fisher (nI),
pertanto −2(`0 −`A) si distribuisce come (β0 − βA)2 (nI). Ma, per quanto si è dimostrato
nel paragrafo precedente, (β0 − βA) si distribuisce come un v. c. normale N (0,(nI)−1 ) e
1
ciò implica che (β0 − βA)(nI) 2 si distribuisce come una v. c. normale standard N (0,1).
Quindi, abbiamo che (β0 − βA)2 (nI) si distribuisce come una variabile casuale χ g2 , dove
g è la differenza tra il numero di parametri del denominatore e il numero di parametri
del numeratore. Si è cosi determinato che la statistica −2logQ si distribuisce come
una v. c. χ g2 . Tale risultato è noto come teorema di Wilks (Piccolo, 1998, p. 647).
48
R
R
R
2
Per dimostrare la disuguaglianza di Cauchy-Schwarz, ( g f ) ≤ ( g 2 )( f 2 ), basta considerare la
funzione
di t definita
come
che l’integrale del suo quadrato è sempre non negativo
R
R
R g + t f e verificare
R
(g + t f )2 = ( g 2 ) + 2t( g f ) + t 2 ( f 2 ) ≥ 0. Ciò può verificarsi solo se il discriminante di questa
R
R
R
2
equazione di secondo grado in t è minore di zero: ( g f ) −( g 2 )( f 2 ) ≤ 0 (cvd). Tale discriminante
è uguale a zero solo se g e f sono linearmente dipendenti, per cui esiste un t tale che la funzione
R
R
R
2
g + t f = 0. In questo caso ( g f ) = ( g 2 )( f 2 ).
25
A9. Teorema limite centrale
La formulazione più semplice del teorema limite centrale riguarda la convergenza della somma standardizzata di n v. c. X i ∼ iid verso la distribuzione normale
standardizzata. Indicando con σ2 la varianza e con µ la media delle v. c. X i :
Pn Pn
Pn
X
−
E
i
i
i Xi
i X i − nµ
q
Pn = p 2
nσ
Var
i Xi
P
p 1 Pn
n
1
n n i Xi −µ
n
i Xi −µ
∼ N (0,1)
(A9-1)
=
=
σ
p
σ
n
Quindi, si ha che all’aumentare di n:
p 1 Pn
n n i Xi −µ
p
∼ N (0,1) ⇔ n(X n − µ) ∼ N (0,σ2 )
σ
dove X n è la media campionaria delle n v. c. X i .
26
(A9-2)
B0. Test statistici premessa
Nel test delle ipotesi statistiche α è la probabilità di commettere l’errore del Io
tipo: rifiutare l’ipotesi H0 quando essa è vera. Fissato α, rifiuto H0, al livello α, se il
valore stimato a partire dalla realizzazione campionaria ricade nella Regione Critica
(la regione dello spazio parametrico che, dato il campione e il valore prescelto per α,
implica il rifiuto dell’ipotesi nulla H0).
Nel seguito n è la numerosità del campione, e:
n
n
1 X
S =
(x i − x)2
n − 1 i=1
1X
x=
xi
n i=1
2
(1)
sono rispettivamente la media e la varianza campionarie. In generale faremo riferimento a popolazioni distribuite in modo normale e ipotizzeremo che i campioni siano
casuali (rappresentativi), cioè costituiti da realizzazioni di variabili casuali indipendenti
ed identicamente distribuite (distribuite come la popolazione).49
B1. Test sulla media
1. Se la varianza σ2 della popolazione dalla quale è stato estratto il campione è
nota, allora la seguente statistica (calcolata sotto l’ipotesi H0: la media della
popolazione è uguale a µ0 ) è la realizzazione di uno stimatore che si distribuisce
come una variabile casuale normale standardizzata: z ∼ N (0,1),
zc =
x − µ0
p
σ/ n
(2)
l’ipotesi H0, può essere rifiutata al livello di significatività α, se |zc | > zα/2 . Dove,
zα/2 è il valore teorico di z che delimita la Regione Critica (corrispondente ai
valori di z più distanti dalla media che possono verificarsi con probabilità α).50
2. Se la varianza della popolazione è incognita, lo stimatore della media, che si
distribuisce come una variabile casuale t di Student con n − 1 gradi di libertà51 ,
da luogo al calcolo della seguente statistica:
tc =
x − µ0
p
S/ n
(3)
l’ipotesi H0, può essere rifiutata al livello di significatività α, se |t c | > t n−1,α/2 .
Dove, t n−1,α/2 è il valore teorico di t n−1 che delimita la Regione Critica (corrispondente ai valori di t n−1 più distanti dalla media che possono verificarsi con
probabilità α).
L’ipotesi potrebbe essere formulata in modo unidirezionale e, in questo caso, il confronto dovrebbe essere effettuato con il valore t n−1,α .
49
V. Piccolo D., 1998, Statistica, Il Mulino, Bologna.
V. figura 4.
51
In quanto al punto precedente si è sostituita al denominatore della statistica σ con S.
50
27
Il test sulla differenza tra i valori medi di due campioni casuali indipendenti
(di numerosità n ed m) generati da variabili casuali normali è basato sull’ipotesi che
le varianze delle due popolazioni, X e Y , siano uguali anche se incognite. L’ipotesi
H0 afferma che la differenza tra le medie delle due popolazioni è d0 contro l’ipotesi
alternativa H1 che tale differenza sia maggiore di (minore o diversa da) d0 . La statistica
da calcolare è:
v
t nm(n + m − 2)
x − y − d0
(4)
tc = q
n+m
(n − 1)S 2 + (m − 1)S 2
x
y
essa dovrà essere confrontata con il valore teorico della variabile casuale t di Student in
corrispondenza ad n + m − 2 gradi di libertà ed opportuni livelli di α/2 o α (a secondo
che l’ipotesi sia bidirezionale, |t c | > t n+m−2,α/2 , o unidirezionale t c > t n+m−2,α ). In
sostanza questo test verifica se le due popolazioni sono somiglianti. Per campioni
grandi la precedente statistica può essere semplificata nel modo seguente:
zc = q
x − y − d0
(5)
S 2x /n + S 2y /m
da confrontare con i valori della variabile casuale normale standardizzata zα o zα/2
secondo i casi. Se le varianze sono diverse (problema di Behrens-Fisher), un test
asintotico (test di Welch), può essere basato sulla seguente statistica:
tc = q
x − y − d0
(6)
S 2x /n + S 2y /m
e i gradi di libertà della variabile casuale t di Student saranno dati dall’espressione:
S 2x /n − S 2y /m
(7)
S 2y
S 2x
+
n2 (n−1)
m2 (m−1)
Il test sulla differenza tra valori medi per dati appaiati è riferito a coppie di
variabili casuali. L’ipotesi nulla è specificata come H0 : µ x − µ y = v0 contro l’ipotesi
alternativa H1 : µ x − µ y > v0 . La statistica del test è:
tc =
d − v0
p
Sd / n
(8)
dove:
n
di = x i − yi
d=
1X
(x i − yi )
n i=1
Sd2 =
n
1 X
(di − d)2
n − 1 i=1
(9)
Fissato α, l’ipotesi H0 viene rifiutata, al livello α, se t c risulta maggiore al valore teorico
t n−1,α . Anche in questo caso l’ipotesi potrebbe essere bidirezionale e il valore teorico
della v. c. t di Student da prendere in considerazione sarà t n−1,α/2 .
Un caso particolare di test sulla media è quello del test asintotico sulla proporzione. Nel caso dell’ipotesi semplice unidirezionale, H0 è formulata come p = p0
28
contro H1 : p > p0 . La distribuzione del carattere in esame è di tipo bernoulliano: ogni
elemento assume l’attributo 1 con probabilità p e valore 0 con probabilità (1 − p). La
media della popolazione è, quindi, pari a p e la varianza della popolazione è p(1 − p).
La statistica da calcolare per sottoporre a test l’ipotesi H0 è:
zc = p
p̂ − p0
(10)
p0 (1 − p0 )/n
dove p̂ è la media campionaria (la somma dei valori 0 e 1 divisa per n). L’ipotesi
H0 verrà rifiutata se zc > zα . Quest’ultimo test, in definitiva, sottopone a verifica
un’ipotesi sull’andamento delle frequenze di un attributo. In questa stessa tipologia
rientra anche il test sulla differenza tra le frequenze relative di un attributo detto anche
test sul confronto tra proporzioni relative a variabili casuali indipendenti. L’ipotesi
H0 sostiene che la differenza tra le due proporzioni è pari a d0 e l’ipotesi alternativa
H1 è espressa da pˆx − pˆy > d0 . La statistica da calcolare è:
zc = p
pˆx − pˆy − d0
(11)
p̂(1 − p̂)(1/n + 1/m)
dove:
p̂ =
n pˆx + m pˆy
(12)
n+m
Il valore calcolato dovrà essere posto a confronto con la variabile casuale normale
standardizzata zα o zα /2 a secondo che l’ipotesi sia rispettivamente unidirezionale
(tenuto conto del verso) o bidirezionale.
B2. Test sulla varianza
Se non è nota la media della popolazione dalla quale è stato estratto il campione,
l’ipotesi H0 che può essere sottoposta a test è la seguente: H0 : σ2 = σ02 contro
H1 : σ2 > σ02 . Calcolata la seguente statistica:
χc2 =
n−1
σ02
S2
(13)
2
essa deve risultare maggiore del valore teorico χn−1,α
corrispondente al livello di
significatività α e ad n−1 gradi di libertà. Nel caso sia nota la media bisogna considerare
n gradi di libertà. Se l’ipotesi è formulata come: H0 : σ2 = σ02 contro H1 : σ2 6= σ02
allora, il rifiuto di H0, al livello di significatività α, sarà possibile solo se la statistica
χc2 assume valori esterni all’intervallo che ha come estremi, rispettivamente, inferiore
e superiore i valori teorici:
2
χn−1,1−α/2
2
χn−1,α/2
(14)
Il test sul rapporto tra le varianze di variabili casuali normali e indipendenti
sottopone a verifica l’ipotesi H0 : σ2x = σ2y contro l’ipotesi alternativa H1 : σ2x > σ2y . La
statistica da calcolare è:
Pn
1
2
S 2x
n−1
i=1 (x i − x)
Fc = 2 = 1 Pm
(15)
2
Sy
(
y
−
y)
i
m−1
i=1
29
e i valori critici teorici della v. c. Fn−1,m−1 di Fisher-Snedecor per n − 1 e m − 1 gradi
di libertà sono quelli corrispondenti al livello di significatività α o 1 − α (secondo la
direzione), nel caso unidirezionale, oppure α/2 e 1 − α/2 nel caso bidirezionale. È
utile tener presente la seguente relazione:
Fn−1,m−1,1−α =
1
Fn−1,m−1,α
(16)
Questo test permette di rifiutare l’ipotesi nulla di uguaglianza delle varianze solo quando
il numeratore della statistica e molto diverso dal denominatore.
B3. Test non parametrici
Il test sulla bontà di adattamento formula l’ipotesi H0 che le frequenze osservate
siano uguali alla frequenze teoriche di un preciso modello probabilistico. La statistica
necessaria per effettuare questo confronto tra frequenze osservate e frequenze teoriche
è la seguente:
χc2
k
X
(ni − npi )2
=
npi
i=1
(17)
dove ni sono le frequenze osservate per le k classi la cui unione costituisce il supporto
delle probabilità pi , quindi i valori npi sono le frequenze teoriche calcolate in base al
modello probabilistico scelto dall’ipotesi H0. Fissato il livello α, la regione critica per il
2
rifiuto di H0 è data da χc2 > χk−1,α
.
Il test sulla indipendenza formula l’ipotesi H0 di indipendenza di due variabili
casuali, X e Y . La statistica del test è costruita in base allo scostamento tra frequenze
osservate ni j e frequenze teoriche n̂i j calcolate sotto l’ipotesi di indipendenza:
χc2
=
k X
h
X
(ni j − n̂i j )2
i=1 j=1
n̂i j
(18)
La regione critica per H0 è χc2 > χ(k−1)(h−1),α .
B4. ANOVA
L’ANOVA (analisi della varianza) analizza le medie in più di due gruppi mediante
il confronto delle devianze. Questa metodologia è basata sulla decomposizione della
devianza totale, D, di un fenomeno multivariato nel quale un determinato effetto y
può dipendere da k cause (o trattamenti):
nj
nj
k X
k X
k
X
X
X
2
2
D=
( yi j − y) =
( yi j − y j ) +
n j ( y j − y)2 = DW + DB
j=1 i=1
j=1 i=1
(19)
j=1
dove y è la media globale, y j è a media del gruppo j soggetto alla causa j, D è la
devianza globale, DW è la devianza all’interno dei gruppi (within) e DB è la devianza tra
30
i gruppi (between). Dividendo le devianze per i rispettivi gradi di libertà, si ottengono
la varianza within e la varianza between, rispettivamente:
2
SW
=
DW
n−k
SB2 =
DB
k−1
Pn j
( yi j − y j )2
(20)
Considerato che:
k
X
n−k =
(n j − 1)
S 2j
=
j=1
i=1
nj −1
(21)
risulta:
Pk
2
SW
2
j=1 (n j − 1)S j
= Pk
j=1 (n j − 1)
(22)
per cui la varianza within è una media ponderata delle varianze all’interno di ogni
gruppo. Il test statistico F di Fisher-Snedecor può essere utilizzato per stabilire se la
varianza between è significativamente maggiore della varianza within. L’ipotesi nulla
è che le due varianze siano uguali, il suo rigetto significa che almeno una causa ha
agito, modificando la variabilità dell’effetto medio tra i gruppi oltre il livello medio
di variabilità registrato all’interno dei gruppi. I gradi di libertà del numeratore della
statistica sono k − 1 e quelli del denominatore son n − k, pertanto il valore calcolato
dalla statistica:
Fc =
SB2
2
SW
(23)
verrà confrontato con i valore teorico, dipendente da α, della v.c. Fk−1,n−k,α . Perché sia
valida questa procedura è necessario verificare che le componenti erratiche individuali
siano distribuite normalmente.
31
B5. Esempio di individuazione della Regione Critica
Il grafico seguente mostra un esempio di individuazione della regione critica per
un test unidirezionale sulla media nel caso della v. c. z.
0.3
0.2
RC(α)=zc > zα
0.1
Densita della v.c. normale standardizzata
0.4
Individuazione della Regione Critica per H0
0.0
α
−3
−2
−1
0
1
zα 2
3
z
figura 4: La regione critica per H0, RC(α), va da zα a ∞.
B6. Simulazione della regressione lineare in R
Per studiare la regressione può essere conveniente simulare il DGP (data generating
process) e poi inferire dai dati le caratteristiche del DGP che sono, in realtà, già note.
Ciò permette di verificare i risultati e di constatarne la coerenza rispetto alle prescrizioni
teoriche del modello di regressione lineare.
Poniamo che le osservazioni ( yi , x i ) siano generate da una relazione lineare con
errori che si distribuiscono come una v.c. normale standardizzata ε ∼ N (0,1):
y i = β0 + β1 x i + ε i
dove β0 = 5 e β1 = 1.2 [v. R1 e figura 5]. Uno dei test utilizzati per verificare la
corretta specificazione funzionale del modello di regressione è il test di Ramsey (reset
test).52 Se il modello è stato specificato correttamente non si può rifiutare l’ipotesi
H0: «la forma funzionale è ben specificata» dato il valore del p-value (che deve risultare
maggiore di 0.05 per accettare H0).
Inoltre, in base alle ipotesi sul modello di regressione, i residui dovrebbero distribuirsi in modo "normale" (vedi grafico in alto a destra della figura 5). L’analisi
52
Per i test citati è necessario caricare alcune librerie - ad. es. lmtest - come specificato negli esempi.
32
15
5
10
y
2
4
6
8
10
x
figura 5: Scatter plot (x i , yi )
grafica consente di avere un’idea della distribuzione degli errori e l’ipotesi di normalità
può essere verificata applicando il test di Shapiro-Wilk sulla normalità dei residui
êi −e
(preventivamente standardizzati con la trasformazione σ
), in tal caso l’ipotesi H0: «i
e
residui sono distribuiti come una v.c. normale» può essere accettata solo se il p-value è
sufficientemente elevato. Con obiettivi analoghi, dal grafico della figura 7 (Normal Q-Q
Plot), si può verificare se gli errori standardizzati si distribuisco come la v. c. normale
standardizzata: i punti dovrebbero disporsi lungo la retta a 45o , se è verificata l’ipotesi
di normalità. Riguardo alla corretta specificazione del modello di regressione lineare, è
utile esaminare il grafico dei residui rispetto ai valori stimati della variabile dipendente:
i punti dovrebbero disporsi orizzontalmente rispetto alle ascisse e simmetricamente
rispetto alla linea orizzontale con intercetta zero (v. grafico in basso a sinistra nella
figura 6). Lo stesso tipo di grafico può essere tracciato rispetto ad ogni variabile esplicativa: se la disposizione dei residui non è casuale ciò indica che il modello "vero" non
è lineare rispetto a quel particolare regressore.
Per testare l’eteroschedasticità dei residui si può utilizzare il test di Breusch-Pagan
per l’ipotesi H0: «la varianza degli errori e costante» (omoschedasticità) che verrà
accettata se il p-value è elevato.
Soprattutto per le serie storiche viene utilizzato il test Durbin-Watson per verificare
che non vi sia autocorrelazione nei residui sotto l’ipotesi H0: «i residui sono incorrelati»
che può essere accettata se il valore del p-value è abbastanza alto. Nello stesso contesto
seriale è possibile utilizzare la funzione di autocorrelazione totale (acf) e la funzione
di autocorrelazione parziale (pacf) per inferire sul processo ARMA che potrebbe aver
generato i residui.
In tutti i software statistici l’output del modello di regressione prevede il calcolo
33
0.2
0.0
5
0.1
10
y
Density
15
0.3
0.4
Istogramma degli errori
2
4
6
8
10
−4
−2
x
0
2
4
2
4
e
4
2
−2
0
et
0
−2
Residui
2
4
Residual vs fitted
6
8
10
12
14
16
−2
Fitted
0
et−1
figura 6: Grafici della regressione e dei residui
Var(e)
dell’indice di determinazione R2 = 1 − Var( y) e della sua versione corretta (non distorta):
(N −1)Var(e)
R2c = 1− (N −k−1)Var( y) (dove k è il numero delle variabili esplicative). l’indice R2 (come
la sua versione corretta) indica quanta parte della variabilità complessiva (TSS: Total
Sum of Squares) della variabile dipendete y è spiegata dalla regressione ed è, quindi,
basato sulla decomposizione della varianza: la variabilità totale è uguale per definizione
alla somma della variabilità della regressione (ESS: Explained Sum of Squares della
stima ŷ) e della variabilità degli errori (RSS: Residual Sum of Squares).
Un test globale su tutti i parametri del modello di regressione può essere condotto
con il test F di Fisher che confronta la variabilità della stima ŷ con la variabilità dei
residui ê. L’ipotesi nulla è H0:«le variabili esplicative non spiegano la variabile dipendente»
(tutti i coefficienti del modello non sono significativamente diversi da zero). Per rifiutare
tale ipotesi (ed attribuire qualche validità al modello) è necessario che la Fc calcolata
sotto H0 sia sufficientemente maggiore della F t eor ica , ottenuta in corrispondenza di k
e n − k − 1 gradi di libertà (e cioè che il p-value sia sufficientemente piccolo). Il test
sui singoli coefficienti β̂ j formula l’ipotesi H0: «il coefficiente β̂ j è, in media, pari a
zero» e confronta la statistica test t̂ j =
β̂ j
σ̂β j
con la t t eor ica che si distribuisce come la
variabile casuale t di Student ed è ben approssimata dalla normale standardizzata al
crescere della numerosità delle osservazioni. La t calcolat a deve essere significativamente
maggiore della t t eor ica e, quindi, il p-value deve essere abbastanza piccolo per poter
rifiutare H0. Utili informazioni al riguardo possono essere dedotte anche dagli intervalli
di confidenza che scaturiscono da questo test (ad es. la posizione dello zero).
34
1
0
−2
−1
Sample Quantiles
2
3
Normal Q−Q Plot
−2
−1
0
1
2
Theoretical Quantiles
figura 7: Adattamento dei residui alla Normale
Codice in R
In sequenza, cercando di rispettare l’ordine degli argomenti trattati nel testo:
R1
#Il DGP dell’esempio
n<-500
# numerosità del campione
e<-rnorm(n,0,1)
# genera una v.c. normale
x<-runif(n,1,10)
# genera la variabile esplicativa x
y=5+1.2*x+e
# genera la variabile dipendente y
plot(x,y)
# il grafico
cor.test(x,y,method="pearson") # test sulla correlazione
R2
# La stima del modello
library(lmtest)
# carica la libreria lmtest
r<-lm(y ~ x) # stima del modello lineare
summary(r)
# mostra i risultati della stima
confint(r)
# intervalli di confidenza dei coefficienti
names(r)
# mostra le informazioni contenute in r
e<-residuals(r)
# salva i residui stimati in e
resettest(r)
# reset test sulla regressione
t.test(e)
# test sulla media dei residui
shapiro.test(
35
(e-mean(e))/sd(e)) # test di normalità dei residui
R3: analisi grafica
# Regressione e distribuzione errori
par(mfrow=c(2,2))
# divide il grafico
plot(x,y)
# nube dei punti
abline(r, col="red", lwd=2)
# linea di regressione
hist(e,freq=F, ylim=c(0,.45),
main="Istogramma",cex.main=.92)
# istogramma
rug(e,lwd=.25,side=1)
# evidenziare la concentrazione
lines(density(e), lwd=2,
col="blue")
# densità della distribuzione
z<-seq(min(e), max(e),.1) # genera il supporto
lines(z,dnorm(z, mean=mean(e), sd=sd(e)),
col="red", lty=2) # curva della normale standardizzata
plot(fitted(r), e, ylab="Residui",
xlab="Fitted",
main=
"Residual vs fitted") # grafico errori verso y stimato
abline(h=0,
col="red") # linea sulla media (zero) dei residui
plot(e[-n], e[-1], xlab=expression(e[t-1]),
ylab=
expression(e[t])) # grafico della correlazione dei residui
abline(0,1,col="red") # bisettrice
par(mfrow=c(1,1))
# ripristina la finestra del grafico
qqnorm((e-mean(e))/sd(e))
abline(0,1, col="red")
# Normal Q-Q plot
plot(x, e, ylab="Residui", xlab="x", main="Residual vs x");
abline(h=0, col="red")
# grafico errori rispetto ad x
pairs(data.frame(x, fitted(r), r$residuals)) # grafico pairs
R4: Test sulla regressione e stima robusta
# Altri test sulla regressione
vcov(r)
# matrice var-covarianze dei coefficienti
bptest(r) # Breusch-Pagan test (omoschedasticità residui)
dwtest(r) # test di Durbin-Watson (autocorrelazione residui)
library(lmtest) # carica la libreria lmtest
coeftest(r)
# test sui coefficienti
coeftest(r, df=Inf,
vcov=vcovHAC(r)) # test robusto sui coefficienti
library(sandwich) # carica la libreria sandwich
print(vcovHC(r)) # varcov dei parametri con eteroschedasticità
print(vcovHAC(r)) # con eteroschedasticità ed autocorrelazione
library(robust)
# libreria per la stima robusta
lmRob(y ~ x)
# regressione robusta
summary(lmRob(y ~ x)) # riepilogo dei risultati della stima
36
Ulteriori comandi in R:
Per salvare il grafico corrente nel file "scatterxy" in formato eps:
par(family="Times")
# da porre all’inzio dello script
dev.copy(postscript, file="scatterxy.eps", height=6, width=6,
horizontal=F, onefile=F, fonts="Times")
dev.off()
Riferimenti bibliografici
Belsey, D. A., Kuh, E. e Welsch, R. E. (1980), Regression diagnostics, Wiley.
Box, G. E. P. e Cox, D. R. (1964), ‘An analysis of transformations’, Journal of the Royal
Statistical Society Vol. 26(2), 211–252.
Davidson, R. e MacKinnon, J. G. (2003), Econometric Theory and Methods, Oxford
University Press, New York.
Frisch, R. e Waugh, F. V. (1956), ‘Partial time regressions as compared with individual
trends’, Econometrica Vol. 1(4), 387–401.
Greene, W. H. (2012), Econometric Analysis - 7/E., Prentice Hall.
Lang, S. (1984), Algebra lineare - 7/E., Boringhieri, Torino.
Lovell, M. (1963), ‘Seasonal adjustment of economic time series’, Journal of the
American Statistical Association Vol. 58, 993–1010.
Murli, A. (2007), Matematica numerica: Metodi, Algoritmi e Software. Parte prima,
Liguori Editore, Napoli.
Piccolo, D. (1998), Statistica, Il Mulino, Bologna.
Quarteroni, A. e Saleri, F. (2006), Introduzione al calcolo scientifico, Springer Verlag.
Weisberg, S. (2005), Applied Linear Regression - ed. III, Wiley.
37
Indice
Il modello di regressione lineare
1
La distorsione da variabile omessa
2
Sfericità degli errori e teorema di Gauss-Markov
3
La varianza degli errori
5
L’ipotesi di normalità degli errori
6
Cenni alle proprietà asintotiche dei minimi quadrati
7
A0. Il teorema di Frisch-Waugh-Lovell e i valori anomali
10
A1. Medie e varianze condizionate
14
A2. Indipendenza tra trasformazioni di vettori di v. c. normali
16
A3. Indice di condizionamento
18
A4. Intervallo di previsione
19
A5. Trasformazione di Box e Cox
20
A6. Test di Wald
20
A7. Stima numerica di massima verosimiglianza
23
A8. Varianza dei parametri e log-verosimiglianza
24
A9. Teorema limite centrale
26
B0. Test statistici premessa
27
B1. Test sulla media
27
B2. Test sulla varianza
29
B3. Test non parametrici
30
B4. ANOVA
30
B5. Esempio di individuazione della Regione Critica
32
B6. Simulazione della regressione lineare in R
32
Bibliografia
37
38
")