Capitolo I
TRASMISSIONE NUMERICA
IN BANDA BASE
In questo Capitolo si prende in esame la trasmissione numerica dei segnali in banda base (segnalazione PAM) affrontando, in particolare, il problema della rivelazione in presenza di rumore allo
scopo di dedurre lo schema del ricevitore ottimo. Le prestazioni del ricevitore, in termini della probabilità di errore per simbolo, sono dedotte nel caso di segnalazione binaria e di segnalazione Maria. Infine sono discussi i comportamenti spettrali del segnale PAM in funzione dell’impulso di segnalazione e della codifica adottata.
I.1 – Generalità.
Nella trasmissione numerica binaria il messaggio inviato dalla sorgente è costituito da
una sequenza ordinata di cifre
…, d−2 , d−1 , d0 , d1 , d2 ,…
appartenenti all’alfabeto binario i cui elementi si denotano con 0 e 1 . Nel caso di trasmissione sincrona le cifre d n sono emesse dalla sorgente con cadenza regolare; detto allora
T0 il periodo di cifra, la quantità:
r=
(I.1.1)
1
T0
costituisce il ritmo binario (bit rate) e rappresenta il numero di cifre che la sorgente
emette nell’unità di tempo.
Un sistema di trasmisdisturbo
d
v (t )
Trasmettitore
Mezzo
trasmissivo
sione numerica può essere
r (t)
Ricevitore
d̂
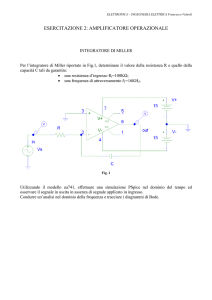
Fig. I.1 - Schema di principio di un sistema di trasmissione numerica.
schematizzato come mostra
la Fig. I.1.
In essa si distinguono i
seguenti blocchi:
a) un trasmettitore che associa alla sequenza di cifre binarie del messaggio una successione di forme d’onda, dette forme di segnalazione, appartenenti ad un insieme
S M = {sn (t )}n = 0 di M segnali distinti.
M −1
b) un mezzo trasmissivo la cui uscita r(t ) è, in generale, una replica poco fedele del segnale in ingresso v (t) per effetto delle distorsioni, delle interferenze e dei disturbi prodotti dal canale;
c) un ricevitore il quale, a partire da r(t ) , fornisce in uscita il messaggio
… , dˆ , dˆ , dˆ , dˆ , dˆ ,…
−2
−1
0
1
2
in genere diverso da quello originario.
I.2 – Struttura del segnale numerico.
Nel caso di trasmissione in banda base, cui si fa riferimento in questo Capitolo, il se-
Cap. I – Trasmissione numerica in banda base
-2-
gnale numerico v (t ) in uscita dal modulatore è costituito da una sequenza di forme di segnalazione traslate nel tempo; esso quindi può essere espresso nella forma:
v(t ) =
(I.2.1)
∞
∑ s (t − nT )
n
n =−∞
dove sn (t ) rappresenta un elemento dell’insieme delle forme di segnalazione SM che si
suppone sia caratterizzato da una trasformata di Fourier concentrata attorno alla frequenza zero.
In quel che segue, si suppone che le segnalazioni sn (t ) siano confinate nell’intervallo
[0, T) e che pertanto costituiscono dei segnali ed energia finita.
Nel caso di segnalazione binaria l’insieme
s0 (t )
s1 (t )
SM contiene solo due elementi ( M = 2 ) che
sono associati ai simboli binari secondo la
T
T
t
t
seguente regola:
(I.2.2)
v(t )
d = 0 ⇒ s0 (t )
d = 1 ⇒ s1 (t )
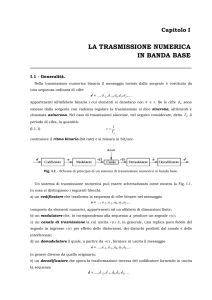
In Fig. I.2 è riportato un esempio di segnaT
{d n }
0
2T 3T
1
0
0
4T
5T
1
1
6T
0
7T
le numerico in corrispondenza della sequenza
dati {d n } in cui ai simboli binari sono asso-
t
0
ciate le forme di segnalazione s0 (t ) e s1 (t ) e
Fig. I.2 – Segnale numerico in banda base.
rappresentate nella stessa figura.
Nel caso più generale di trasmissione M -aria, le forme di segnalazione sono poste in
corrispondenza a gruppi di k simboli (parole). In altri termini, la sequenza dei dati emessa dalla sorgente è dapprima raggruppata in parole di k elementi e poi a ogni configurazione di k cifre si associa una forma di segnalazione sn (t ) . Naturalmente poiché esistono
2 k distinte parole di lunghezza m si dovrà avere:
M = 2k
La quantità T , in genere diversa da T0 , costituisce il periodo di simbolo. Il suo inverso
(I.2.3)
1
T
R=
(I.2.4)
prende il nome di velocità di modulazione e individua il numero di simboli M -ari trasmessi nell’unità di tempo. La sua unità di misura è il baud o simboli/sec.
Una particolare forma di segnalazione è data dalla:
(I.2.5)
s n (t ) = a n p (t )
dove an rappresenta un simbolo numerico appartenente ad un alfabeto di M elementi e
p(t) il cosiddetto impulso di segnalazione, supposto confinato in [ 0, T ) . Un segnale di
questo tipo è denominato segnale PAM (Pulse Amplitude Modulation) multilivello o segnale PAM M-ario. L’espressione del segnale PAM è quindi:
(I.2.6)
v(t ) =
∞
∑a
n =−∞
n
p(t − nT )
Nella segnalazione PAM in genere i simboli an sono distribuiti simmetricamente rispetto allo zero e si ha (v. Fig. I.3):
-3-
G. Mamola – Lezioni di Comunicazioni Elettriche
an = 2n − ( M + 1)
(I.2.7)
−1
1
seguente corrispondenza:
d = 0 ⇒ a = −1
(I.2.8)
d = 1 ⇒ a = +1
M =3
−2
−3
Nel caso di segnale PAM binario si ha la
M =2
0
0
−1
2
M =4
0
1
n = 1, 2, … , M
meglio nota come codifica bipolare.
3
Nel caso di segnalazione binaria si può
Fig. I.3 - Simboli numerici.
adoperare
(codifica unipolare):
(I.2.9)
la
seguente
corrispondenza
d =0⇒a=0
d =1⇒ a =1
che corrisponde ad adottare le segnalazioni s0 (t ) = 0 e s1 (t ) = p(t) .
Un’ulteriore alternativa è costituita dal codice bipolare alternato definito dalla:
d =0⇒a =0
(I.2.10)
d = 1 ⇒ a = ±1
dove la scelta del segno è fatta imponendo che nella sequenza dei simboli {an } i simboli
+1 e − 1 si alternino. In tal caso i simboli an appartengono all’alfabeto ternario composto
dagli elementi {−1, 0,1}. Per questo motivo quest’ultimo codice è denominato anche codice
pseudo-ternario giacchè i simboli +1 e −1 assumono lo stesso significato informativo. Si
osservi che in questo caso la codifica della cifra d n = 1 può essere effettuata solo se si conosce il valore del simbolo corrispondente alla cifra d = 1 precedente. Un tale tipo di codi-
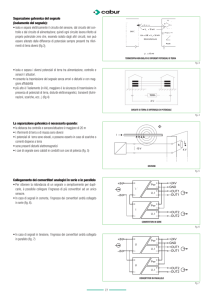
{d n }
fica costituisce un esempio di
1 1 0 1 0 1 1 0 0 1
1
Codice
bipolare
0
codifica con memoria a differen-
t
za dei codici bipolare ed unipolare che possono essere classificati
−1
come codici privi di memoria o
Codice
unipolare
1
0
istantanei.
t
segnale PAM binario v (t ) in cor-
1
Codice
bipolare
alternato
0
In Fig. I.4 è rappresentato il
rispondenza delle codifiche sopra
t
−1
Fig I.4 – Struttura del segnale modulato per segnalazione PAM binaria.
presentate e nel caso in cui
l’impulso di segnalazione sia un
rettangolo di durata T .
I.3 – La rivelazione del segnale numerico.
Con riferimento allo schema di Fig. I.1, ci si rende facilmente conto che il segnale ricevuto è una versione distorta del segnale prodotto dal trasmettitore e corrotta da disturbi.
Se in quel che segue il mezzo di trasmissione si schematizza come un sistema lineare e
tempo invariante, caratterizzato cioè da una risposta impulsiva pari a ht (t) , la sola causa
di disturbo che è presa in considerazione è costituita da un rumore additivo che si suppone di tipo gaussiano, a valor medio nullo, ed indipendente dalla sequenza dei simboli
Cap. I – Trasmissione numerica in banda base
-4-
trasmessi. In tale circostanza il segnale in arrivo al ricevitore è pertanto espresso dalla:
∞
∑ s (t − nT ) + n(t )
r (t ) =
(I.3.1)
n =−∞
n
dove
sn (t ) = sn (t ) ∗ ht (t )
(I.3.2)
rappresenta la forma di segnalazione in uscita dal canale quando al suo ingresso è presente il segnale sn (t ) .
La decisione sul simbolo trasmesso può essere eseguita leggendo il segnale ricevuto
all’istante tk = kT + τ , dove è τ ∈[0,T ) . Risulta:
r (tk ) =
(I.3.3)
∞
∑ s ( (k − n)T + τ ) + n(t
n =−∞
n
k
) = sk (τ) +
∞
∑ s ( (k − n)T + τ ) + n(t
n =−∞
n≠k
n
k
)
Nella precedente si distinguono tre termini:
• la quantità s˜k ( τ) che costituisce il segnale utile dato che è posta in corrispondenza con
la segnalazione sk (t ) trasmessa all’istante kT ;
• la quantità
∑ n≠ k s˜n ((k − n)T + τ ) che tiene conto della trasmissione di tutti i dati emessi
dalla sorgente eccetto il k -esimo e che pertanto costituisce la cosiddetta interferenza
d’intersimbolo (ISI InterSymbol Interference);
• la quantità n(tk ) che costituisce il rumore prodotto dal mezzo di trasmissione.
È da notare che se le forme di segnalazione sono confinate nell’intervallo [0, T) ed il
mezzo di trasmissione è schematizzato come un canale ideale di banda sufficientemente
ampia da accomodare completamente il segnale numerico, si ha:
(I.3.4)
sn (t ) = Asn (t − td )
dove A denota l’attenuazione o il guadagno (a seconda se è A < 1 o A > 1 ) del mezzo di trasmissione e td il ritardo di propagazione. In tali condizioni l’interferenza di intersimbolo è
nulla e la (I.3.3), tenendo conto della (I.3.4), si riduce alla:
(I.3.5)
r = s ( τ) + n
dove si è posto, per comodità di scrittura, r ≡ r(tk ) , s( τ ) ≡ sk ( τ ) , n ≡ n(t k ) e, per semplicità,
A ≡ 1 e td = 0 ( 1 ).
I.4 - Probabilità di errore.
Lo scopo del ricevitore è di estrarre l’informazione trasmessa dal segnale in arrivo; esso deve quindi stimare il simbolo emesso dalla sorgente a partire dai valori del campione
del segnale ricevuto. È ovvio che, in dipendenza dai valori assunti dal rumore, si possono
commettere errori nella stima; nasce pertanto spontaneo valutare le prestazioni del ricevitore in termini della probabilità di errore definita dalla:
P = Pr dˆ ≠ d
(I.4.1)
e
{
e cioè alla probabilità che si verifichi l’evento
k
k
{dˆ
k
}
≠ dk
}
che corrisponde alla circostanza
che il simbolo rivelato dˆ k risulti diverso da quello d k trasmesso.
(1) È da notare che tale condizione comporta che il ricevitore conosca esattamente il valore del ritardo di propagazione o, detto in altri termini, che esso sia in grado di produrre un perfetto sincronismo.
-5-
G. Mamola – Lezioni di Comunicazioni Elettriche
A tale scopo è opportuno prendere qui in considerazione solo il caso di segnale numerico PAM. Si suppone inoltre il mezzo di trasmissione ideale cosicché l’impulso di segnalazione all’ingresso del ricevitore è dato da p(t) ; inoltre si considera nulla l’interferenza di
intersimbolo (cosa che si verifica se l’impulso di segnalazione è confinato nell’intervallo
[0, T ) ). Il segnale letto all’istante generico di lettura vale quindi:
r = αa + n
(I.4.2)
dove si è posto r ≡ r(tk ) , a ≡ ak α ≡ p(τ) e n ≡ n(t k ) .
In termini generali il problema è alquanto complesso. Tuttavia se ci si limita a considerare soltanto codifiche di tipo istantaneo, la decisione sulla cifra trasmessa può essere
effettuata simbolo per simbolo.
Nel caso di trasmissione binaria, considerata in questo paragrafo, lo schema del ricevi-
v(t )
tore si presenta come è indicato in
sincronismo
n(t )
λ
r >λ
r
r(t )
Campion.
Decisore
r <λ
Fig. I.5. Il valore campionato del se-
dˆk = 1
dˆk = 0
gnale all’istante tk è comparato con
una soglia λ e, secondo il segno del-
Fig. I.5 – Struttura del ricevitore per trasmissione binaria.
la quantità r − λ , è presa una decisione sul dato d da rivelare.
Se pr|0 (r | 0) e pr|1 (r | 1) denotano le densità di probabilità di r , atteso che la sorgente
abbia emesso le cifre d k = 0 e d k = 1 rispettivamente, le probabilità di errore condizionate
valgono:
∞
Pe|0 (λ ) = Pr {r > λ | d k = 0} = ∫ pr |0 (r | 0)dr
λ
(I.4.3)
Pe|1 (λ) = Pr {r < λ | d k = 1} = ∫
λ
pr |1 (r |1)dr
−∞
Poiché gli eventi
{d k
= 0} e
{d k
= 1} sono disgiunti, denotando con P0 = Pr {d k = 0} e
P1 = Pr {d k = 1} le probabilità ad essi associate, la probabilità di errore non condizionata è:
Pe = P0 Pe|0 + P1 Pe|1
(I.4.4)
che, tenendo conto delle (I.4.3), diventa:
(I.4.5)
∞
λ
λ
−∞
Pe = P0 ∫ pr 0 ( r 0)dr + P1 ∫
pr 1 (r 1)dr
Tale quantità dipende dal valore della soglia λ ; di conseguenza può determinarsi il
valore ottimo λ 0 di λ che rende minimo la Pe imponendo la condizione:
∂Pe
∂λ
(I.4.6)
e cioè
(I.4.7)
=0
λ =λ 0
P0 pr |0 (λ 0 | 0) = P1 pr |1 (λ 0 | 1)
I.4.1 – Caso del rumore gaussiano.
Se il rumore n(t) si suppone gaussiano a valor medio nullo e varianza σ , risulta:
2
(I.4.8)
pn ( n ) =
1
2πσ 2
−
e
Di conseguenza sulla base della (I.4.2), si deduce:
n2
2 σ2
Cap. I – Trasmissione numerica in banda base
⎡ (r − αa0 ) 2 ⎤
exp ⎢ −
⎥
2σ 2 ⎦
2πσ 2
⎣
⎡ (r − αa1 ) 2 ⎤
1
exp ⎢ −
⎥
2σ 2 ⎦
2πσ 2
⎣
1
pr |0 (r | 0) = pn (r − αa0 ) =
(I.4.9)
pr |1 (r |1) = pn (r − αa1 ) =
per cui la condizione (I.4.7) conduce alla
⎛P ⎞
a +a
σ2
(I.4.10)
λ0 = α 0 1 −
log ⎜ 1 ⎟
2
α ( a1 − a0 )
⎝ P0 ⎠
Se i simboli trasmessi si suppongono equiprobabili (P0 = P1 =
1
2
), si ottiene:
a0 + a1
2
λ0 = α
(I.4.11)
-6-
In tale, ipotesi, le probabilità di errore condizionate valgono:
(I.4.12)
−
Pe|0 = ∫
∞
α
a0 + a1
2
2 πσ2
Pe|1 = ∫
α
a0 + a1
2
1
1
−∞
( r −αa0 )2
2 σ2
e
−
( r −αa1 )2
2 σ2
e
2 πσ 2
dr
dr
che, introducendo la funzione Q( x) definita dalla:
Q( x) =
(I.4.13)
∞
1
∫
2π
x
e−u
2
/2
du
assumono la forma:
∫
u2
−
∞
2 du
α a1−a0 e
2
σ
⎛ α a1 − a0 ⎞
= Q⎜
⎟
⎝σ 2 ⎠
Pe 0 =
1
2π
Pe 1 =
u2
a −a
−α 1 2 0 −
1
σ
e 2 dr
2 π −∞
(I.4.14)
∫
=
1
2π
∫
u2
−
∞
2 du
α a1−a0 e
σ 2
⎛ α a1 − a0 ⎞
= Q⎜
⎟
⎝σ 2 ⎠
La probabilità di errore è pertanto
⎛ α a1 − a0 ⎞
Pe = Q ⎜
⎟
⎝σ 2 ⎠
(I.4.15)
Se i simboli emessi dalla sorgente non sono equiprobabili, è facile verificare che la
probabilità di errore vale:
⎡a − a α
⎛P
σ
(I.4.16)
Pe (λ 0 ) = P0 ⋅ Q ⎢ 1 0 −
log ⎜ 1
σ
α
−
a
a
2
(
)
1
0
⎝ P0
⎣⎢
⎡ a1 − a0 α
⎞⎤
⎛P
σ
+
log ⎜ 1
⎟ ⎥ + P1 ⋅ Q ⎢
σ
α
−
a
a
2
(
)
1
0
⎠ ⎦⎥
⎝ P0
⎣⎢
⎞⎤
⎟⎥
⎠ ⎦⎥
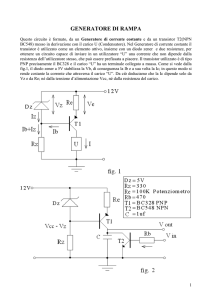
il cui andamento in funzione di P0 è rap-
Pe
presentato in Fig. I.6 (curva a).
Nella maggior parte dei casi, non sono
c)
Q⎛⎜ α a1−a0 ⎞⎟
⎝σ 2 ⎠
d)
note le probabilità P0 e P1 associate ai
simboli della sorgente; di conseguenza la
b)
soglia ottima data dalla (I.4.10), non può
essere
a)
0
P̂0
0,5
P̂0
1
Fig. I.6 – Probabilità di errore in funzione di P0 .
determinata.
conveniente stimare
P0
In
questi
casi
è
le probabilità dei
simboli della sorgente e valutare la soglia
ottima:
(I.4.17)
⎛ Pˆ
a +a
σ2
λˆ 0 = α 1 0 −
log ⎜ 1
⎜ Pˆ
α(a1 − a0 )
2
⎝ 0
⎞
⎟⎟
⎠
sulla base di una stima Pˆ0 e Pˆ1 delle suddette probabilità. Dette allora P0 e P1 le effettive
-7-
G. Mamola – Lezioni di Comunicazioni Elettriche
probabilità associate alla sorgente, la probabilità di errore diventa:
⎧⎪ α(a1 − a0 )
⎛ Pˆ
⎛ Pˆ ⎞ ⎫⎪
σ
σ
⎪⎧ α(a1 − a0 )
(I.4.18) Pe = P0 ⋅ Q ⎨
−
+
log ⎜ 1 ⎟ ⎬ + P1 ⋅ Q ⎨
log ⎜ 1
⎜
⎟
⎜ Pˆ
ˆ
2σ
α (a1 − a0 )
2σ
α(a1 − a0 )
⎝ P0 ⎠ ⎭⎪
⎝ 0
⎩⎪
⎩⎪
⎞ ⎫⎪
⎟⎟ ⎬
⎠ ⎭⎪
che nel piano (P0 , Pe ) della Fig. I.6, è rappresentata da una retta con pendenza positiva
1
1
(curva d) o negativa (curva b) a seconda se è Pˆ0 < 2 o Pˆ0 > 2 . Una tale scelta potrebbe produrre un degrado inaccettabile delle prestazioni del sistema in termini di probabilità di
errore specie quando la probabilità P0 è prossima ai suoi valori estremi. Se la stima della
1
probabilità dei simboli della sorgente è fatta scegliendo Pˆ = Pˆ = , la probabilità di errore
0
1
2
assume l’espressione (I.4.15) e risulta indipendente da P0 (curva c). Una tale situazione
costituisce un accettabile compromesso dal momento che non pregiudica eccessivamente
le prestazioni del sistema. In un sistema di trasmissione binaria, quindi, il ricevitore posiziona la soglia al valore λ 0 dato dalla (I.4.10), indipendentemente dal valore delle probabilità associate ai simboli di sorgente; in corrispondenza a tale situazione la probabilità
di errore risulta data dalla (I.4.15) ed è indipendente dai valori di P0 e P1 .
I.5 - Il ricevitore ottimo.
Come si deduce dalle (I.4.15) e (I.4.16), la probabilità di errore dipende, a parità di
α
forma di segnalazione, dalla quantità σ attraverso la funzione Q (⋅) . Poiché tale funzione
è strettamente decrescente all’aumentare del suo argomento, si conclude che la massiα
mizzazione della quantità σ conduce ad un ricevitore che fornisce le migliori prestazioni
in termini di probabilità di errore.
Limitandosi
sincronismo
n(t)
v(t)
h(t)
r >λ
r
Campion.
considerare
la
classe dei ricevitori la cui struttura
λ
r(t)
a
Decisore
r <λ
dˆk = 0
dˆk =1
Fig. I.7 - Struttura del ricevitore ottimo.
è riportata in Fig. I.7 comprendente
in particolare un filtro in ingresso,
supposto lineare e tempo invariante,
caratterizzato da una risposta impulsiva pari ad h( t) , il problema del ricevitore ottimo
consiste nel determinare la forma ho (t) della risposta impulsiva del filtro che renda minima la probabilità di errore. Supponendo che il segnale numerico all’uscita del filtro h(t) ,
letto all’istante di campionamento tk = kT + τ
( τ ∈[0,T ) ), non presenti interferenza
d’intersimbolo, la condizione di minima probabilità di errore si raggiunge quando è masα˜
sima la quantità σ˜ , in cui le grandezze che in essa compaiono sono valutate all’uscita del
filtro h(t) .
Si ha:
(I.5.1)
∞
α = ∫ p(τ − λ)h(λ)d λ
−∞
D’altra parte, se il rumore n(t ) in ingresso è stazionario, a valor medio nullo e bianco,
la varianza del rumore in uscita vale:
Cap. I – Trasmissione numerica in banda base
σ 2 = E
=∫
(I.5.2)
{∫
∞
∞
∫
∞
−∞ −∞
∫
∞
−∞ −∞
-8-
}
n(τ − λ1 )n(τ − λ 2 )h(λ1 )h(λ 2 )d λ1d λ 2 =
E {n(τ − λ1 )n(τ − λ 2 )} h(λ1 )h(λ 2 )d λ1d λ 2 =
N0
N ∞
δ(λ 2 − λ1 )h(λ1 )h(λ 2 )d λ1d λ 2 = 0 ∫ h 2 (λ )d λ
2
2 −∞
α˜
la densità spettrale di n (t ) . La quantità σ˜ allora diviene:
=∫
∞
∫
∞
−∞ −∞
avendo denotato con
N0
2
α
γ=
σ
(I.5.3)
2
N0
=
∫
∞
−∞
p ( τ − λ ) h (λ ) d λ
∫
∞
−∞
h 2 (λ ) d λ
Per determinare il valore ottimo di h(t) basta far riferimento alla disuguaglianza di
Schwarz secondo la quale se x(t) e y(t) denotano due funzioni reali di variabile reale t , a
quadrato integrabile in \ , si ha:
2
∫
(I.5.4)
\
x(t ) y (t )dt ≤ ∫ x 2 (t ) dt ⋅ ∫ y 2 (t ) dt
\
\
dove il segno di uguaglianza vale solo se è
y (t ) = k ⋅ x (t )
(I.5.5)
e cioè se le funzioni x(t) e y(t) sono proporzionali. Ponendo nella (I.5.3)
x (t ) = p ( τ − t ) ;
(I.5.6)
y (t ) = h (t )
si ottiene
γ≤
(I.5.7)
2
N0
∫
∞
−∞
p 2 (τ − t ) dt =
2
N0
∫
∞
−∞
p 2 (t ) dt =
2E
≡ γo
N0
essendo E l’energia dell’impulso di segnalazione. Ciò significa che al variare di h(t) la
quantità γ non supera il limite γ o che costituisce per-
p(t)
tanto il suo valore massimo. Tale massimo si raggiunge
quando è verificata la condizione (I.5.5) che, tenendo
conto
0
T
t
p(−t)
delle
posizioni
fatte,
consente
di
dedurre
l’espressione della caratteristica del filtro ottimo:
ho (t ) = kp ( τ − t )
(I.5.8)
dipendente dall’impulso di segnalazione. Per questo motivo il filtro in questione prende il nome di filtro adat−T
0
t
p(τ− t)
tato.
Si noti che la costante k non influenza il valore ottimo γ o della quantità γ e per questo motivo può essere
considerata unitaria nella (I.5.8).
t
τ−T 0 τ
Fig. I.8 - Condizioni di causalità per
il filtro adattato.
È bene osservare che non sempre il filtro, definito
dalla (I.5.8), risulta fisicamente realizzabile, giacché la
funzione ho (t) può violare la condizione di causalità e-
spressa dalla
(I.5.9)
ho (t ) ≡ 0 per t < 0
Tuttavia, se l’impulso di segnalazione p (t ) è di durata T , ho (t) risulta fisicamente realizzabile solo se (v. Fig. I.8) è τ = T . Allora ho (t) vale:
(I.5.10)
ho (t ) = k ⋅ p (T − t )
-9-
G. Mamola – Lezioni di Comunicazioni Elettriche
Esempio I.1
Nel caso particolare in cui p (t ) sia un impulso rettangolare unitario, confinato nell’intervallo
[0, T ) , risulta (con
k = 1 ):
ho (t ) = rect
( )
t − T2
T
per cui la risposta del filtro adattato quando al suo ingresso è presente l’impulso di segnalazione
p (t ) è:
p(t)
a)
0
T
t
q (t ) = p (t ) ∗ ho (t ) =
∫
∞
−∞
p ( τ) ho (t − τ) d τ =
b)
0
T
2T
T
0
t≤0
0≤t ≤T
T ≤ t ≤ 2T
t ≥ 2T
Con riferimento alla Fig.E.1 che rappresenta l’impulso q (t ) è evidente
che nell’istante di lettura T
q(t)
∫
⎧0
⎪t
⎪
⎛ t −τ− T ⎞
rect ⎜⎜ T 2 ⎟⎟ d τ = ⎨
⎝
⎠
⎪T − t
⎪⎩0
il valore
può essere ottenuto
r (T )
integrando l’impulso in ingresso p (t ) . Un tale filtro può essere quindi
realizzato da un integratore, il quale è azzerato negli istanti tk = (k + 1)T ,
provenienti dal sincronismo generato al ricevitore, come é mostrato in
Fig. E.2.
t
Fig. E.1
Se p (t ) ha una forma diversa dalla rettangolare ma
sincronismo
pur sempre confinata nell’intervallo [0, T) il segnale in
C
R
uscita dal filtro adattato, quando al suo ingresso è
-RC
applicato il segnale x(t ) e valutato all’istante T , vale:
(I.5.11)
∞
T0
−∞
0
y (T ) = ∫ x(λ)ho (T − λ)d λ = k ∫ x(λ) p(λ)d λ
Fig. E.2
Dalla (I.5.11) si deduce che lo schema del ricevitore
ottimo può assumere la struttura a correlatore riportata in Fig. I.9, che comporta le
operazioni di prodotto e successiva integrazione.
Rispetto alla struttura a filtro adattato lo
∑ p(t − nT)
λ
r >λ
∫0 ()⋅ dt
t
Campionat.
Decisore
r <λ
schema a correlatore è
dˆk = 1
dˆk = 0
correlatore
sincronismo
Fig. I.9 - Ricevitore ottimo a correlazione.
più
flessibile
quando
occorre variare la forma dell’impulso di segnalazione; in tal caso
basta infatti generare al ricevitore la sequenza Σp (t − kT0 ) senza dover sostituire il filtro
come nel caso di ricevitore a filtro adattato.
In presenza di filtro adattato la probabilità di errore, supposti i simboli equiprobabili,
diviene:
(I.5.12)
⎛ E a1 − a0 ⎞
Pe = Q ⎜⎜
⎟
2 ⎟⎠
⎝ N0
Nel caso di codifica bipolare ( a0 = −1; a1 = 1 ), la (I.5.12) fornisce:
(I.5.13)
⎛ 2E ⎞
Pe = Q ⎜⎜
⎟⎟
⎝ N0 ⎠
Nel caso di codifica unipolare, essendo a0 = 0 a1 = 1 , si ha:
Cap. I – Trasmissione numerica in banda base
⎛ E
Pe = Q ⎜⎜
⎝ 2N0
(I.5.14)
- 10 -
⎞
⎟⎟
⎠
Al fine di paragonare i due sistemi di segnalazione è opportuno introdurre l’energia
media per simbolo Em definita dalla:
Em = E {a 2 } ∫ p 2 (t )dt = E {a 2 } E
(I.5.15)
T
che vale:
cod. bipolare
⎧E
Em = ⎨ 1
⎩ 2 E cod. unipolare
(I.5.16)
e quindi la probabilità di errore Pe , in termini del rapporto
(I.5.17)
1
, diventa:
⎧ ⎛ 2 Em ⎞
⎪Q ⎜⎜
⎟ cod. bipolare
⎪ ⎝ N 0 ⎟⎠
Pe = ⎨
⎪ ⎛ Em ⎞
⎪Q ⎜⎜ N ⎟⎟ cod. unipolare
0 ⎠
⎩ ⎝
In Fig. I.10 sono riportati gli andamenti della
Codifica
unipolare
−2
Em
N0
10
probabilità di errore in funzione del rapporto
Pe
segnale rumore
−4
10
Em
N0
per i due tipi di codifica
esaminati. È evidente che a parità di
Codifica
bipolare
10−6
Em
N0
la
probabilità di errore è minore nel caso di codifica
bipolare rispetto a quella che si ottiene con
−8
10
codifica unipolare; per ottenere lo stesso valore di
−4
−2
0
2
4
6
8
Pe , infatti, la codifica bipolare comporta una
10
Em / N0 [dB]
Fig. I.10 - Probabilità di errore in funzione di Em / N 0 .
riduzione del rapporto
Em
N0
di 2 che espresso in dB
vale circa 3 dB (=10 log10 2 ).
I.6 - Densità spettrale del segnale numerico.
La densità spettrale del segnale numerico PAM, definito dalla (I.2.6), dipende, oltre che
dalla forma dell’impulso di segnalazione p(t ) , anche dalle proprietà statistiche della sequenza dei simboli an a loro volta dipendenti dal tipo di codifica adottata.
In quel che segue, la sequenza di cifre {d n } si suppone stazionaria e costituita da elementi incorrelati ed equiprobabili. Per contro i simboli an possono essere correlati, dipendentemente dalla struttura del codice adottato; la sequenza {an } è comunque stazionaria e pertanto caratterizzata dalla funzione di autocorrelazione discreta:
(I.6.1)
Ra (k ) = E {an an + k }
Com’è noto, la densità spettrale può calcolarsi trasformando secondo Fourier la media
temporale della funzione di autocorrelazione Rv (t, τ ) del segnale numerico v (t) e cioè:
(I.6.2)
Wv ( f ) = F {< Rv (t , τ) >}
Di conseguenza, per valutare la W v ( f ) occorre innanzi tutto determinare l’espressione
della funzione Rv (t, τ ) .
I.6.1 - Autocorrelazione Rv (t, τ ) .
Ricordando l’espressione (I.2.6) del segnale v (t ) , la Rv (t, τ ) diviene:
- 11 -
G. Mamola – Lezioni di Comunicazioni Elettriche
Rv (t , τ) = E {v(t )v(t + τ)} =
(I.6.3)
∞
∞
∑ ∑ E {a a } p(t − mT ) p(t + τ − nT )
m n
m =−∞ n =−∞
che, tenendo presente la (I.6.1), si scrive:
Rv (t , τ) =
(I.6.4)
∞
∞
∑ ∑ R (n − m) p(t − mT ) p(t + τ − nT )
m =−∞ n =−∞
a
Effettuando nella (I.6.4) la seguente trasformazione di indici r = n − m e s = m , si ottiene:
Rv (t , τ) =
(I.6.5)
∞
∞
∑ R (r ) ∑ p(t − sT ) p [t + τ − (r + s)T ]
r =−∞
a
s =−∞
Poiché risulta:
∞
(I.6.6)
∑
p (t + T − sT ) p[t + T + τ − (r + s )T ] =
s =−∞
=
∞
∞
s =−∞
s =−∞
∑ p[t − (s − 1)T ] p[t + τ − (r + s − 1)T ] = ∑
p (t − sT ) p[t + τ − (r + s )T ]
la funzione Rv (t, τ ) è periodica in t di periodo T . Il segnale v(t) è pertanto ciclostazionario.
Ciò comporta che la media temporale della funzione Rv (t, τ ) si riduce alla:
∞
∞
1 T2
< Rv (t , τ) >= ∑ Ra (r ) ∑ ∫ T p(t − sT ) p[t + τ − (r + s )T ]dt
(I.6.7)
−2
r =−∞
s =−∞ T
che, con un’opportuna trasformazione di variabili, assume la forma:
∞
T − sT
1 ∞
2
< Rv (t , τ) >= ∑ Ra ( r ) ∑ ∫ T p (t ) p (t + τ − rT ) dt =
−
− sT
2
T r =−∞
s =−∞
(I.6.8)
∞
1 ∞
= ∑ Ra (r ) ∫ p (t ) p (t + τ − rT )dt
−∞
T r =−∞
Denotando pertanto con γ p ( τ ) la funzione di autocorrelazione associata all’impulso di
segnalazione, supposto ad energia finita:
∞
γ p (τ) = ∫ p(t ) p(t + τ)dt
(I.6.9)
−∞
la precedente diviene:
(I.6.10)
< Rv (t , τ) >=
1 ∞
∑ Ra (r )γ p (τ − rT )
T r =−∞
I.6.2 - Densità spettrale Wv ( f ) .
In base alla (I.6.2) si ottiene:
(I.6.11)
Wv ( f ) =
1 ∞
∑ Ra (r )F {γ p (τ − rT )}
T r =−∞
dalla quale, ricordando che per il teorema di Wiener è:
(I.6.12)
F {γ p (τ)} = P( f )
2
avendo denotato con P( f ) la trasformata di Fourier dell’impulso di segnalazione p(t ) , discende:
(I.6.13)
Wv ( f ) =
P( f )
T
2
∞
∑ R ( r )e
r =−∞
− j 2 πfrT
a
a) Codice bipolare
Essendo, per le ipotesi fatte E {an } = 1 12 − 1 12 = 0 , risulta:
(I.6.14)
e quindi la (I.6.13) vale:
Ra (0) = E {an2 } = 1 12 + 1 12 = 1
Ra (r ) = E {an an + r } = E {an } E {an + r } = 0
Cap. I – Trasmissione numerica in banda base
Wv ( f ) =
(I.6.15)
P( f )
- 12 -
2
T
b) Codice unipolare
Essendo E {an } = 0 12 + 1 12 = 12 , si ha:
Ra (0) = 0 12 + 1 12 =
(I.6.16)
1
2
Ra ( r ) = E {an an + r } = E {an } E {an + r } =
∞
per cui la (I.6.13), ricordando la formula di Poisson
1
4
∞
∑ e − j 2πfrT = T ∑ δ(f − Tr ), diviene:
1
r = −∞
r = −∞
2
⎡
⎤
P ( f ) ⎢ 1 1 ∞ − j 2 πrfT ⎥ P ( f ) ⎡ 1 1 ∞ − j 2 πrfT ⎤
+ ∑e
=
+ ∑e
Wv ( f ) =
⎥=
⎥
T ⎢ 2 4 r =−∞
T ⎢⎣ 4 4 r =−∞
⎦
r ≠0
⎣⎢
⎦⎥
2
(I.6.17)
2
=
P( f ) ⎡ 1 1
+
T ⎢⎣ 4 4T
⎤
∑ δ ( f − )⎥⎦
∞
r
T
r =−∞
che si può porre nella forma:
Wv ( f ) =
(I.6.18)
P( f )
2
+
4T
1
4T 2
∞
∑ P( ) δ( f − )
r =−∞
r
T
2
r
T
c) Codice bipolare alternato
L’autocorrelazione Ra (r) , associata alla sequenza {an } , vale:
Ra (0) = E {an2 } = 1 ⋅ Pr {an = 1} + 1 ⋅ Pr {an = −1}
(I.6.19)
Ra (1) = E {an an +1} = −1 ⋅ Pr {an = 1, an +1 = −1} − 1 ⋅ Pr {an = −1, an +1 = 1}
Ra (r ) = E {an an + r } = −1 ⋅ Pr {an = 1, an + r = −1} + 1 ⋅ Pr {an = 1, an + r = 1} +
− 1 ⋅ Pr {an = −1, an + r = 1} + 1 ⋅ Pr {an = −1, an + r = −1}
D’altra parte si ha:
Pr {an = 0} =
(I.6.20)
1
2
Pr {an = 1} = Pr {an = −1} =
1
4
e per la formula di Bayes
Pr {an = 1, an +1 = −1} = Pr {an +1 = −1 | an = 1} Pr {an = 1} = 12 14 = 81
(I.6.21)
Pr {an = −1, an +1 = 1} = Pr {an +1 = 1 | an = −1} Pr {an = −1} = 12 14 =
e analogamente per r ≥ 2 :
Pr {an = 1, an + r = 1} = Pr {an + r = 1| an = 1} Pr {an = 1} =
(I.6.22)
1 1
4 4
Pr {an = 1, an + r = −1} = Pr {an + r = −1| an = 1} Pr {an = 1} =
1 1
4 4
= 161
1 1
4 4
Pr {an = −1, an + r = −1} = Pr {an + r = −1| an = −1} Pr {an = −1} =
= 161
1 1
4 4
Risulta allora:
1
2
Ra (1) = −1 18 − 1 18 = − 14 = Ra (−1)
(I.6.23)
Ra (r ) = −1 161 + 1 161 − 1 161 + 1 161 = 0 = Ra (−r )
| r |≥ 2
per cui:
(I.6.24)
Wa ( f ) = 12 − 14 ( e j 2 πfT + e − j 2 πfT ) =
1 − cos(2πfT )
= sin 2 (πfT )
2
e quindi la W v ( f ) vale:
(I.6.25)
Wv ( f ) =
P( f )
T
2
sin 2 (πfT )
1
8
= 161
Pr {an = −1, an + r = 1} = Pr {an + r = 1| an = −1} Pr {an = −1} =
Ra (0) = 1 14 + 1 14 =
| r |≥ 2
= 161
- 13 -
G. Mamola – Lezioni di Comunicazioni Elettriche
Le densità spettrali così ottenute sono composte da una componente continua e da
una componente discreta; quest’ultima è presente solo nel caso di codifica unipolare.
⎛ t − T2 ⎞
⎟
T ⎠
Se l’impulso di segnalazione assume la forma rettangolare e cioè p(t) = rect ⎜⎝
, si ha:
| P ( f ) |2 = T 2 sinc 2 ( fT )
(I.6.26)
Risulta in definitiva:
a) per il codice bipolare:
Wv ( f ) = T sinc 2 ( fT )
(I.6.27)
b) per il codice unipolare:
(I.6.28)
Wv ( f ) = T4 sinc 2 ( fT ) + 14 δ( f )
c) per il codice bipolare alternato:
(I.6.29)
Wv ( f ) = T sinc 2 ( fT ) sin 2 ( πfT )
Le
0.5
componenti
continue
delle densità spettrali così ot-
Wv ( f )
T
0.3
Codice unipolare
tenute sono rappresentate in
Fig. I.12. Dalla stessa figura si
rileva che i codici bipolari ed
Codice bipolare
unipolari presentano compo0.2
nenti spettrali elevati alle basse frequenze. Per questo moti-
Codice bipolare alternato
0.1
vo il segnale può subire forti
0.0
0.0
0.5
1
1.5
2
2.5 fT 3
Fig. I.12 - Densità spettrale del segnale numerico PAM per vari tipi di
codifica e con impulso di segnalazione rettangolare.
degradazioni se il mezzo di
trasmissione
presenta
una
frequenza di taglio inferiore
non nulla.
I.7 - Codifica PAM multilivello.
I.7.1- Caratteristiche del segnale numerico.
Nel caso di codifica multilivello i simboli an possono assumere valori appartenenti ad
un alfabeto composto da M elementi distinti che, come espresso dalla (I.2.7) si suppongono distribuiti simmetricamente attorno allo zero.
Nella modulazione PAM multilivello le cifre d n del messaggio sono raggruppate in blocchi di m elementi ed ad ogni configurazione di cifre si fa corrispondere un valore an scelto fra
(I.7.1)
M = 2m
possibili secondo opportune regole all’uopo stabilite. Così ad esempio nel caso di codifica
a M = 4 livelli, adottando lo schema di codifica riportato nella Tab. I.1, il segnale numerico assume la forma indicata in Fig. I.13.
Codici di questo tipo sono detti codici di Gray. Essi sono caratterizzati dal fatto che
sequenze binarie corrispondenti a due livelli contigui differiscono solo per un bit.
Per costruire un codice di Gray si può procedere come appresso indicato:
Cap. I – Trasmissione numerica in banda base
{dn }
Tabella I.1
d n −1
dn
an
0
0
-3
0
1
-1
1
1
1
- 14 -
01 10 00 11 10 00 11 01 10 01 00 11
v (t )
3
1
t
-1
1
0
3
-3
T
Fig. I.13 - Codifica multilivello.
• si numerino i livelli dal più piccolo al più grande e si associa ad ogni livello un codice
binario che corrisponde alla rappresentazione binaria dell’ordine del livello;
• a partire dalla codifica binaria b1 , b2 , … , bn , dove b1 è la cifra più significativa e bn quella
meno significativa, si costruisce il codice di Gray D1 , D2 ,…, Dn operando secondo la seguente regola:
D1 = b1
(I.7.2)
Di = bi + bi −1 (mod 2)
(i ≥ 2)
dove la somma “modulo 2” è definita in accordo al seguente schema
0
1
0
0
1
1
1
0
Con M = 8 si ottiene la codifica di Gray come è indicato nella Tab. I.2
Tabella I.2
Numero d’ordine
del livello
Rappresentazione
binaria
Codifica di Gray
0
1
2
3
4
5
6
7
000
001
010
011
100
101
110
111
000
001
011
010
110
111
101
100
Si noti che, se con T0 si denota il periodo di cifra, con m = 4 risulta T = 2T0 . Più in generale è T = mT0 e di conseguenza la velocità di modulazione vale:
1
1
r
R= =
=
(I.7.3)
T T0 log 2 M log 2 M
e risulta inferiore al ritmo binario r . È da osservare, però, che se i livelli an sono equiprobabili, l’informazione media associata ad ogni simbolo an è log 2 M , cosicché la velocità
d’informazione risulta pari a R ⋅ log 2 M = r come nel caso della trasmissione binaria.
I.7.2 - Densità spettrale.
Se le cifre d n emesse dalla sorgente possono ritenersi indipendenti ed equiprobabili, i
livelli an saranno anch’essi indipendenti ed equiprobabili e ad ognuno di essi può essere
associata una probabilità pari a
1
M
. Di conseguenza la densità spettrale del segnale mo-
- 15 -
G. Mamola – Lezioni di Comunicazioni Elettriche
dulato v (t ) può essere calcolata per mezzo della (I.6.13) dove è ora:
⎧⎪ E {an2 }
r = 0
Ra (r ) = E {an an + r } = ⎨
(I.7.4)
⎪⎩ E {an } ⋅ E {an + r } r ≠ 0
Tenendo conto delle relazioni:
M
M ( M + 1)
n=
(I.7.5)
∑
2
n =1
M
∑n
2
=
n =1
M ( M + 1)(2M + 1)
6
si ottiene
M
1
4
2
[ 2n − (M + 1)] =
M
M
n =1
Ra (0) = ∑
(I.7.6)
M
∑n
2
4( M + 1) M
( M + 1) 2
M 2 −1
n+
M=
∑
3
M
M
n =1
−
n =1
e
2
⎡M 1
⎤
Ra ( r ) = ⎢ ∑ [ 2n − ( M + 1) ]⎥ = 0
⎣ n =1 M
⎦
(I.7.7)
( r ≠ 0)
La (I.6.13) pertanto diventa:
M 2 − 1 P( f )
Wv ( f ) =
T
3
(I.7.8)
2
che, supponendo p(t) costituito da un impulso rettangolare di durata T = T0 log2 M
P ( f ) = T0 log 2 M sinc( fT0 log 2 M )
(I.7.9)
vale
Wv ( f ) = T0 log 2 M
(I.7.10)
che
per
M=2
coincide
con
50
l’espressione già ricavata nel caso di
codifica bipolare.
In Fig. I.14 è riportato l’andamento
M =8
Wv ( f )
T0
di Wv ( f ) per diversi valori di M . Dalla
stessa
figura
si
rivela
M 2 −1
sinc 2 ( fT0 log 2 M )
3
30
M =4
che,
20
all’aumentare di M , la banda occupata dal segnale diminuisce; in parti-
10
colare, detta B2 la banda relativa alla
M =2
0
codifica binaria, quando si adotta un
0.0
codice multilivello si ha:
(I.7.11)
0.2
0.4
0.6
0.8
T0 f
1.0
Fig. I.14 - Densità spettrale del segnale multilivello.
BM =
B2
B2
=
m log 2 M
Per contro l’energia specifica media del segnale ricevuto con codifica multilivello, a parità
di energia dell’impulso di segnalazione, vale:
1 ⎡ M 2⎤
M 2 −1
EM =
a
E
=
E
(I.7.12)
∑
n
3
M ⎢⎣ n =1 ⎥⎦
essendo E l’energia specifica dell’impulso di segnalazione.
Nel caso bipolare la (I.7.11) vale
(I.7.13)
E2 = E
cosicché, dal confronto fra la (I.7.12) e (I.7.13) si deduce che la codifica multilivello comporta un impegno maggiore di energia di
M2 − 1
3 .
Cap. I – Trasmissione numerica in banda base
- 16 -
I.7.3 - Probabilità di errore.
Per valutare la probabilità di errore basta ricordare che, nell’ipotesi che il canale di
trasmissione sia ideale, il segnale in ingresso al demodulatore è
r = αa + n
(I.7.14)
essendo, come prima, r ed n i valori dei campioni del segnale ricevuto e del rumore
nell’istante di campionamento tk = kT0 + τ . L’attenuazione di canale α , come precedentemente, è pari a p(τ) ed a denota il generico simbolo M -ario trasmesso.
αa1
α(a1 + 1)
…
α(an − 1)
α(an + 1)
αan
α(a M − 1)
…
Seguendo lo stesso
αa M
r
criterio
di
decisione
adottato per il caso bi-
Fig. I.15 – Regioni di decisione.
nario,
il
ricevitore
decide sul simbolo an trasmesso secondo il valore assunto dal segnale ricevuto r = αa + n .
Se i livelli trasmessi sono equiprobabili la decisione sul livello an è presa se r cade
nell’intervallo I n ≡ [α(an − 1), α(an + 1)] , per i livelli intermedi; per i livelli terminali, si decide
a favore del livello a1 se r cade nell’intervallo I1 ≡ [ −∞, α(a1 + 1)] e del livello a M se r è contenuto nell’intervallo I M ≡ [α(aM − 1), +∞ ] (v. Fig. I.15).
Denotando con Pe |a n la probabilità di errore condizionata dalla trasmissione del simbolo an , la probabilità di errore non condizionata può esprimersi con la
1 M
Pe =
(I.7.15)
∑ Pe|a
M n =1 n
in cui, essendo gli eventi {r < α(an − 1)} e {r > α(an + 1)} disgiunti, è:
Pe|an = Pr {r ∉ I n | a = an } =
= Pr{r < α(an − 1) | a = an } + Pr{r > α(an + 1) | a = an } =
(I.7.16)
= Pr{n < −α} + Pr{n > α}
e, analogamente
(I.7.17)
2 ≤ n ≤ M −1
Pe|a1 = Pr {r ∉ I1 | a = a1} = Pr{r > α (a1 + 1) | a = a1} = Pr{n > α}
Pe|aM = Pr {r ∉ I M | a = aM } = Pr{r < α (aM − 1) | a = aM } = Pr{n < −α}
Se il rumore n(t) è un processo stazionario gaussiano a media nulla e varianza σ si
2
ha
∞
1
α
2πσ
(I.7.18) Pr {n > α} = Pr {n < −α} = ∫
32
10−1
Pe
−
n2
2 σ2
⎛α⎞
dn = Q ⎜ ⎟
⎝σ⎠
Tenendo conto delle (I.7.16) e (I.7.17), la (I.7.15) di-
16
venta
8
Pe = 2
(I.7.19)
10−3
che,
4
10−5
2
e
quando
si
M −1 ⎛ α ⎞
Q⎜ ⎟
M
⎝σ⎠
pone
M =2,
coincide
con
l’espressione già ottenuta nel caso binario.
Come nel caso binario la Pe dipende dal rapporto
-5
0
5
10
EM
[dB]
N0
20
Fig. I.16 - Probabilità di errore per segnali multilivello in funzione di E M / N 0 .
α
σ
cosicché il minimo di tale quantità si ottiene in
presenza di filtro adattato. Supponendo che il rumore introdotto dal canale sia bianco e con densità
- 17 -
G. Mamola – Lezioni di Comunicazioni Elettriche
spettrale pari a
N0
2
, il minimo della Pe è dato dalla:
Pe = 2
(I.7.20)
M − 1 ⎛ 2E ⎞
Q ⎜⎜
⎟⎟
M
⎝ N0 ⎠
Introducendo anche in questo caso l’energia media per simbolo, definita dalla (I.7.12),
la (I.7.20) diventa:
(I.7.21)
Pe = 2
M −1 ⎛
6 EM
Q⎜
2
⎜
M
⎝ M − 1 N0
⎞
⎟⎟
⎠
La probabilità di errore per simbolo è rappresentata in Fig. I.16, in funzione del rapporto segnale rumore EM / N 0 per diversi valori di M .
Allo scopo di paragonare i sistemi multilivello con quelli binari è più significativo introdurre la probabilità di errore per bit Peb . Mentre nel caso binario la Peb coincide con la
Pe , nel caso di codifica multilivello non esistono relazioni semplici fra queste quantità.
Tuttavia ammettendo che la codifica multilivello sia effettuata in modo tale che le sequenze binarie corrispondenti a due livelli contigui differiscono solo per la posizione di un
bit (come nel caso del codice di Gray) e supponendo inoltre che il valore del rapporto segnale rumore sia talmente elevato da considerare trascurabile la probabilità che si rilevi
un livello non adiacente da quello trasmesso, la probabilità di errore per bit sarà allora
data dalla
(I.7.22)
Peb =
Pe
Pe
=
m log 2 M
Nella Tab. I.3 sono riassunte le principali caratteristiche della codifica multilivello rispetto a quella binaria. Dalla Tabella si deduce che le prestazioni della codifica M -aria in
termini di energia specifica e di probabilità di errore sono peggiori rispetto a quelli che si
ottengono nella codifica binaria; per contro il sistema multilivello richiede una banda di
ampiezza minore. I sistemi di codifica M -ari sono allora impiegati in tutti quei casi in cui
la riduzione di banda costituisce il principale obiettivo. In tali casi la diminuzione della
probabilità di errore è compensata da un aumento della potenza del segnale trasmesso.
Tabella I.3
Codifica binaria
Codifica M-aria
Banda del segnale modulato
B
B
log 2 M
Energia specifica media del segnale modulato
E
Probabilità di errore per bit
(con codifica Gray)
⎛ 2E ⎞
Q⎜
⎜ N ⎟⎟
0 ⎠
⎝
M2 − 1
E
3
⎛
M −1
6
E ⎞
2
Q⎜
⎟
2
⎜
M log 2 M ⎝ M − 1 N 0 ⎟⎠