Istruzioni per installare il software necessario per i progetti
del corso di Robotica
Installare Ubuntu 12.04.3 LTS (Precise Pangolin)
http://releases.ubuntu.com/precise/ubuntu-12.04.3-desktop-i386.iso
Installare Git su Ubuntu
$ sudo apt-get install git
Installare Svn su Ubuntu
$ sudo apt-get install subversion
$ svn --help
Checkout di un progetto SVN esistente
o dalla cartella che conterrà il repository (folder)
$ svn co <IP del repository>
Commit di file modificati già presenti sul svn
o dalla root del repository o da una sottocartella
$ svn commit
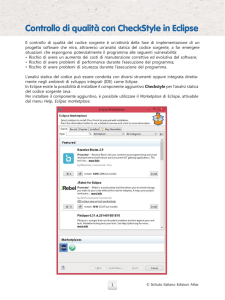
Installare Eclipse su Ubuntu
dal Software Center di Ubuntu cercare "eclipse"
installare la versione 3.7 (Indigo)
avviare eclipse
installare cdt
a. da menu help di eclipse, install new software,
b. work with "all available sites", selezionare link "available software sites", selezionarli
tutti
c. programming languages/ CDT (C++)
installare svn
d. da menu help di eclipse, install new software,
e. colaborations / subversive
f. Subversive SVN Team Provider
g. Restart Eclipse
h. Open Perspective "SVN Repository Exploring"
i. svn kit 3.5: java toolkit (no java native)
Installare ROS Hydro su Ubuntu
Sito di installazione : http://www.ros.org/wiki/hydro/Installation
Installare la versione Desktop-full
Environment setup: eseguire le tre istruzioni seguenti in un Terminal di Ubuntu
$ echo "source /opt/ros/hydro/setup.bash" >> ~/.bashrc
$.~/.bashrc
$ source /opt/ros/hydro/setup.bash
Chiudere il terminal e aprirne uno nuovo
Creare la cartella ~/ROS
$ cd
$ mkdir ROS
workspace di ROS
$ gedit .bashrc
aggiungere in fondo al file la seguente istruzione che specifica il path del workspace di ROS
nella cartella utente
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/ROS
export ROS_WORKSPACE=~/ROS
Chiudere il terminal e aprirne uno nuovo
Configurazione cartella che conterrà gli stack di ROS aggiuntivi
$ mkdir RosStacks