Forza e moto
Se la velocità di un corpo cambia, in valore assoluto o
in direzione, qualcosa deve aver causato questo cambiamento,cioè deve aver causato l’accelerazione del corpo.
Questa interazione che imprime un’accelerazione a un corpo
è detta forza.
Il metodo piú semplice per definire operativamente una forza
è basato sugli effetti dinamici che essa produce.
In fisica la quiete o il moto rettilineo uniforme sono condizioni naturali degli oggetti e per indurre un cambiamento
nel moto dell’oggetto sono necessarie delle interazioni con
altri oggetti. La forza è quell’azione, causata da un agente
esterno al corpo in movimento, che provoca una variazione
della velocità del corpo (o come intensità o come direzione)
e quindi il corpo acquista un’accelerazione.
Fissato l’oggetto A, una forza ha un’intensità uguale (doppia,
ecc.) ad un’altra quando le accelerazioni prodotte sono
uguali (doppie, ecc.). Supponendo che A sia il corpo campione, dalla misura delle accelerazioni si determina la misura
delle forze.
Supponiamo ora di far agire la stessa forza su oggetti puntiformi diversi.
Dati due corpi qualsiasi, diremo che hanno la stessa massa
quando spinti da una stessa forza acquistano la stessa accelerazione e che un corpo ha massa doppia di un altro quando,
spinto dalla stessa forza, acquista un’accelerazione pari alla
metà dell’accelerazione del primo corpo, ecc.
La massa di un corpo è un’osservabile scalare, inversamente
proporzionale al modulo dell’accelerazione impressa al corpo
da una forza stabilita
1
m∼
a
dati due corpi si ha
m1
a2
=
m2
a1
Questa definizione permette di costruire una scala delle masse
indipendentemente dalla natura dei corpi. La massa di un
corpo è la caratteristica che mette in relazione la forza applicata al corpo con l’accelerazione che ne risulta.
La massa rappresenta la proprietà dei corpi di opporsi al
moto e per questo è detta anche “massa inerziale”.
Legge fondamentale della dinamica
Consideriamo un corpo qualsiasi di massa m sul quale agisce
una forza f~; l’accelerazione è legata alla massa e alla forza
da:
f~ = m ~a
2a legge della dinamica
la massa è una costante durante il moto.
Il problema generale della dinamica del punto si può riassumere cosı̀: data una forza comunque variabile nel tempo,
applicata ad un punto, trovare il moto di questo punto.
Viceversa, dato il moto di un punto cercare una forza capace
di determinarlo.
Principio di inerzia (1a legge della dinamica)
Un oggetto A qualsiasi sul quale non agisca alcuna forza secondo la legge fondamentale della dinamica ha accelerazione
nulla
f~ = 0 ⇒ ~a = 0
si deduce quindi che la velocità ~v del corpo è costante e si
ha che se il corpo è inizialmente fermo, esso rimane fermo;
analogamente se esso è in moto rettilineo uniforme con velocità ~v0 esso prosegue di moto rettilineo uniforme con la
stessa velocità ~v0.
Questo è il principio d’inerzia (o prima legge di Newton). I
sistemi di riferimento in cui vale questa legge si chiamano
“inerziali”.
~ = m~a è una relazione vettoriale: l’accelerazione ha sempre
F
la stessa direzione e lo stesso verso della forza che la induce.
Dimensioni e unità di misura
massa [M]
forza [M LT −2]
MKS
CGS
kilogrammo (kg)
grammo (g)
newton (N)
dine
Õ 1 N è la forza che imprime ad un corpo di massa pari a
1 kg un’accelerazione di 1 m/s2
Õ 1 dine è la forza che imprime a 1 g un’accelerazione di
1 cm/s2 ⇒ 1 dine = 10−5N
Come si misurano le forze
Uno strumento per misurare le forze è il dinamometro, formato da una molla attaccata a un sostegno. La molla è
un oggetto ideale che ha una massa trascurabile e che se
allungata o compressa di un tratto ~
x rispetto alla posizione
di equilibrio reagisce con una forza pari a
~ = −k~
F
x
dove k è una costante, detta costante elastica della molla.
Il segno meno sta a indicare che la forza ha sempre verso
opposto a quello dello spostamento, cioè tende a riportare
la molla nella posizione di equilibrio. Per misurare una forza
~ , prima si applica al dinamometro la forza unitaria
incognita F
F~
l0
l0
x
~0 e si misura l’allungamento x0 della molla, che sarà tale
F
~ e
che F0 = kx0. Poi si applica alla molla la forza incognita F
si misura l’allungamento corrispondente che indichiamo con
x e che sarà tale che F = kx da cui
x
F
kx
=
→ F = F0
F0
kx0
x0
da una misura dell’allungamento si può misurare la forza F .
Quando su di un corpo puntiforme di massa m agiscono
~1, F
~2 . . . , F
~k , esso si comporta
simultaneamente più forze F
~ =F
~1 + F
~2 +
come se su di esso agisse la loro risultante F
~k (cioè la somma vettoriale di tutte le forze agenti).
··· + F
Il corpo quindi subisce un’accelerazione nella direzione della
~ e di intensità pari a a = F/m.
risultante F
Quando la risultante di più forze applicate ad un oggetto
puntiforme è nulla lo stato di moto dell’oggetto non cambia (in particolare se l’oggetto è inizialmente fermo rimane
fermo).
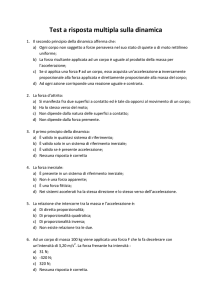
Esempio: in figura al corpo di massa m sono applicate tre
forze e la risultante è stata determinata graficamente mediante la regola del parallelogramma:
F~1
F~1
F~2
m
F~1 + F~2
F~2
F~1 + F~2
F~3
F~1 + F~2 + F~3
F~3
~ = m~a può essere proiettata sugli assi del sistema
La legge F
di riferimento scelto:
y
F~1
θ F~2
F~3
{
~1 + F
~2 + F
~3)x = F1 cos θ + F2
(F
~1 + F
~2 + F
~3)y = F1 sin θ − F3
(F
x
→
→
max = F1 cos θ + F2
may = F1 sin θ − F3
Da queste equazioni, note le forze, possiamo calcolare le
componenti dell’accelerazione lungo gli assi.
Terza legge di Newton
Le forze si manifestano a coppie: se colpiamo un muro, il
muro risponde spingendo in senso inverso contro di noi.
Consideriamo due corpi A e B che interagiscono, ossia ciascuno di essi esercita una forza sull’altro.
Se il corpo A esercita una forza f~AB sul corpo B, il corpo B
esercita una forza f~BA sul corpo A. La terza legge di Newton
dice che le due forze hanno la stessa intensità, la stessa
direzione e verso opposto:
f~AB = −f~BA
3a legge di Newton
Si usa dire che ad ogni azione corrisponde una reazione
uguale e contraria. Si noti però che le due forze agiscono su
corpi diversi.
Es.: un martello che colpisce un chiodo: la forza esercitata
dal martello sul chiodo (azione) è uguale ed opposta alla
forza che il chiodo esercita sul martello (reazione).
Alcune forze
P Forza peso
il peso di un corpo è la forza con cui il corpo stesso è
attirato verso il centro della terra. La forza è dovuta
all’attrazione gravitazionale che si esercita fra le masse
dei corpi
~ = m~g
P
La forza peso, come ~g , è un vettore diretto verso il basso
(~g = −|~g |ĵ, con il verso positivo dell’asse y verso l’alto).
~ = −m~g . In questo caso
N.B. A volte sui testi si trova: P
~g è diretto verso l’alto (~g = |~g |ĵ) ed il segno meno mette
in evidenza il fatto che la forza peso è diretta verso il
basso.
P Forza normale
In generale quando un corpo preme su di una superficie, la superficie si deforma e spinge il corpo con una
~ , perpendicolare alla superficie stessa.
forza normale N
Questa forza è presente anche quando la superficie a
cui si appoggia il corpo è rigida.
Consideriamo un corpo in stato di quiete appoggiato su
di una superficie, ad esempio un tavolo:
~ , la forza normale,
il corpo è soggetto ad una forza N
che equilibra il peso. In condizioni di equilibrio lungo la
verticale si ha
~ = −m~g
N
(diretta verso l’alto)
P Attrito
Se facciamo scivolare un corpo sopra una superficie si
nota una resistenza tra corpo e superficie, detta forza
di attrito o semplicemente attrito. La forza di attrito
agisce parallelamente alla superficie di contatto ed ha
verso opposto alla forza di trascinamento.
P Tensione
Quando un filo (o una fune o un cavo) è fissato ad un
corpo ed è tirato, si dice che è sotto tensione. Il filo
esercita sul corpo una forza di trazione T~ , applicata al
punto di fissaggio e diretta lungo il filo nel verso di allontanamento dal corpo.
Spesso la fune è considerata come priva di massa ed inestensibile.
P Forza esercitata da una molla
La forza esercitata da una molla è chiamata forza di
richiamo ed è proporzionale allo spostamento del corpo
libero dalla posizione di riposo
~ = −k~
F
x
Legge di Hooke
La forza peso è un tipico esempio di forza statica in quanto
è presente anche quando l’accelerazione è nulla. Le forze
statiche possono essere misurate mediante dinamometri.
Si dicono dinamiche le forze che sono presenti solo se i corpi
sono in moto. Per misurarle bisogna conoscere l’accelerazione.
Moto di caduta libera
Il moto dei corpi che vengono lasciati cadere dall’alto o che
vengono lanciati dal basso, è caratterizzato dall’accelerazione g, detta accelerazione di caduta libera, o accelerazione
di gravità. Essa è indipendente dalle caratteristiche del
corpo, quali la massa, la forma, la densità, ecc. ed ha un
valore pari a 9.8 m/s2. La causa di questa accelerazione va
ricercata nella forza di attrazione gravitazionale che si esercita tra i corpi.
Ogni corpo viene attratto verso il centro della terra dalla
forza gravitazionale data da:
~ = GMT m r̂
F
r2
dove: G=costante universale, MT = massa della terra
m = massa del corpo, r = distanza tra il corpo e il centro
della terra, r̂ è il versore della congiungente il corpo di
massa m e il centro della terra.
~ = m~a, il corpo di massa m
Per la 2a legge della dinamica F
lasciato cadere da un’altezza h ha un’accelerazione pari a
GMT
a=
r2
e diretta verso il centro della terra.
a varia con l’altezza rispetto al suolo e con la latitudine
(poichè varia la distanza dell’oggetto dal centro della terra),
ma con una buona approssimazione si può ritenere a costante.
Infatti in generale l’altezza h del corpo rispetto al suolo è
molto minore del raggio della terra per cui r = h + RT ' RT ,
dove RT è il raggio della terra. Quindi l’accelerazione di
caduta libera dei corpi è
GMT
a'
=g
2
RT
Il principio di azione reazione
Consideriamo un blocco di massa m che si trova ad una certa
distanza dal suolo.
La forza che agisce sul blocco è in modulo
MT m
R2
dove R è la distanza del blocco dal centro della terra.
L’accelerazione del blocco dovuta a questa forza è
F1 = G
MT m
GMT
⇒
a
=
1
R2
R2
La forza che agisce sulla terra, per il principio di azione
reazione è in modulo
MT m
F2 = F1 = G
R2
e l’accelerazione corrispondente (della terra) è
F1 = ma1 = G
F 2 = M T a2 = G
MT m
Gm
⇒
a
=
2
R2
R2
Ordini di grandezza:
R ' RT = 6, 4 × 106 m
MT = 6 × 1024 kg
G = 6, 67 × 10−11 m3/(s2kg)
a'g = 9.8 m/s2
6, 67 × 10−11
−24
2
a2 =
m(kg)
=
1.6
×
10
m(kg)
m/s
(6, 4)2 × 1012
dove m(kg) è il valore numerico della massa espresso in kilogrammi. In altre parole
m
a2
m(kg)
=
10−24
=
a1
MT
6
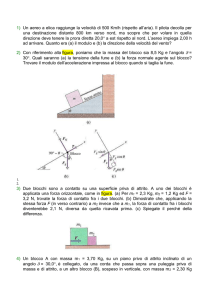
Esempio: il piano inclinato
Un blocco di massa m è tenuto a riposo su un piano inclinato
y
~
N
F~1
m~g
x
h
θ
F1 = forza esercitata da una fune (tensione della fune)
mg = forza peso
N = reazione del vincolo (forza normale)
~1 + N
~ +m~g = 0. PrendiaIl blocco è a riposo ⇐⇒ ~a = 0 ⇒ F
mo il rifermento in modo tale che l’asse x sia diretta lungo il
piano inclinato, verso il basso, l’asse y ad esso perpendicolare
e origine in cima al blocco.
componente x:
− F1 + mg sin θ = 0
componente y:
N − mg cos θ = 0
noti m e θ si possono trovare N e F2, cioè la forza normale
e la forza esercitata dalla fune affinchè il blocco stia fermo.
~1 = 0, il blocco
Caso dinamico: se si taglia il filo, quindi F
non è più in equilibrio ed inizia a scendere lungo il piano
(che supponiamo senza attrito). L’accelerazione del blocco
si determina dalla 2a legge della dinamica
{
ax = g sin θ
~ + m~g = m~a →
N
ay = (N − mg cos θ)/m = 0
ay = 0 sta a indicare che non c’è moto lungo l’asse y: il
blocco nella discesa rimane sempre alla quota y = 0.
Il moto lungo l’asse x è un moto uniformemente accelerato.
Forze di attrito
Ci occuperemo di forze di attrito che si manifestano tra corpi
solidi.
Consideriamo un blocco che si muove su di un tavolo con velocità iniziale ~v0 e che alla fine si arresta. Questo significa che
durante il moto il blocco è sottoposto ad un’accelerazione
con direzione parallela alla superficie del tavolo e con verso
opposto alla velocità. Poichè all’accelerazione si associa una
forza, il blocco è sottoposto ad una forza parallela alla superficie del tavolo, e verso opposto alla velocità del blocco,
chiamata forza di attrito.
Supponiamo di avere un blocco fermo e di spingerlo con
una certa forza, inizialmente il blocco non si mette in moto:
questo è dovuto alla presenza di una forza di attrito che
equilibra la nostra forza. Se aumentiamo la forza con cui
spingiamo il blocco, questo inizia a muoversi, questo significa
che la forza di attrito ha un massimo di intensità.
Quando il blocco non si muove la forza di attrito è detta
forza di attrito statico f~s .
Quando il blocco è in moto, la forza di attrito che si oppone
al moto è detta forza di attrito dinamico fk .
Di solito la forza di attrito dinamico è minore del massimo
valore che può raggiungere la forza di attrito statico.
L’attrito è dovuto all’effetto collettivo delle forze che si esercitano tra gli atomi delle due superfici a contatto: a livello microscopico solo alcuni punti delle due superfici sono a
contatto, quando sotto l’azione della forza esterna il corpo
inizia a muoversi, la forza di attrito si riduce perchè i punti di
contatto variano istante per istante ed è più facile separarli.
Il massimo valore dell’intensità della forza di attrito statico
è
fs,max = µs N
dove µs è il coefficiente di attrito statico e N è il modulo della
forza normale. Se al corpo viene applicata una forza esterna
la cui componente parallela alla superficie è F < fs,max il
corpo non si muove.
Quando il corpo comincia a scivolare lungo la superficie, la
forza di attrito è data da
fk = µk N
dove µk è il coefficiente di attrito dinamico.
µs e µk sono coefficienti adimensionali, che dipendono sia dal
corpo che dalla superficie. Supporremo inoltre che µk non
dipenda dalla velocità.
N.B. La due relazioni precedenti riguardano i moduli delle
forze di attrito: la direzione di queste forze è sempre parallela
~ è
alla superficie e opposta al moto (desiderato), mentre N
perpendicolare alla superficie di appoggio.
Esempio: il piano inclinato con attrito
Un corpo scivola su un piano inclinato e tra corpo e piano
vi è una forza di attrito dinamico con coefficiente µk . Sul
corpo agiscono le seguenti forze:
~ = m~g
P forza peso P
~
P forza normale N
y
f~k
P forza di attrito dinami~
N
co pari in modulo a
h
fk = µk N tangente al piano
P~
e diretta in verso opposto
θ
x
al moto.
Per la seconda legge della dinamica
~ +N
~ + f~k
m~a = P
Proiettiamo questa equazione lungo gli assi cartesiani:
max = mg sin θ − µk N
may = −mg cos θ + N
Ma ay = 0 perchè non c’e’ moto lungo l’asse y quindi
N = mg cos θ. Sostituendo nella prima eq. si ottiene l’accelerazione con cui il corpo scivola lungo il piano inclinato:
max = mg sin θ − µk mg cos θ → ax = g[sin θ − µk cos θ]
(se non c’è attrito: ax = g sin θ).
Se il corpo parte a t = da x = 0 con velocità nulla, quando
arriva a terra ha una velocità
√
(
µk cos θ )
h l’altezza del piano inclinato
vx = 2gh 1 −
sin θ
√
(senza attrito: vx = 2gh che è uguale a quella che si ottiene
nel caso di caduta verticale da una quota h).
Dinamica del moto circolare
Se un corpo si muove su una circonferenza di raggio R, con
velocità in modulo costante, si dice che è in moto circolare
uniforme. L’accelerazione è diretta verso il centro ed è in
modulo costante e vale
v2
a=
accelerazione centripeta
R
Dalla 2a legge di Newton sul corpo deve agire una forza F
v2
F =m
forza centripeta
R
diretta verso il centro di rotazione e costante in modulo
poichè il modulo di v è costante.
N.B. la forza centripeta non è un nuovo tipo di forza: il nome
indica la direzione della forza rispetto al moto, può essere
una forza di attrito (tra le ruote e l’asfalto di una macchina
in curva), forza di gravità (nel caso di una navicella che
ruota attorno alla terra), forza di tensione (sasso trattenuto
da una corda legata a un palo che ruota attorno al palo).
Una forza centripeta accelera un corpo variandone il vettore
velocità senza variarne il modulo.
Sistemi di riferimento
La prima legge di Newton è detta anche legge di inerzia. I
sistemi di riferimento in cui è valida si chiamano inerziali.
Essi sono sistemi che o sono fermi rispetto alle stelle fisse o
si muovono con velocità costante rispetto ad esse.
È possibile tuttavia applicare le leggi della meccanica classica dal punto di vista di un sistema non inerziale, come ad
esempio un sistema in rotazione. In questo caso dobbiamo introdurre forze che non sono newtoniane, le cosiddette
forze fittizie. Queste forze non sono reali nel senso che non
nascono dalla presenza di corpi e scompaiono quando si torna
in un sistema inerziale.
Consideriamo ad esempio un blocco di massa m posto su di
una piattaforma rotante, orizzontale, senza attrito, legato
ad una fune. Per l’osservatore inerziale il blocco ruota ed ha
un’accelerazione centripeta che è fornita dalla forza di tensione della fune e la 2a legge di Newton si scrive T = mv 2/r.
Per un osservatore posto sulla piattaforma il blocco è in
quiete, cioè ~a = 0. Lungo la corda agisce la stessa forza di
tensione, quindi per applicare la 2a legge di Newton occorre
introdurre una forza fittizia che bilanci la forza di tensione
della corda. Questa forza è detta centrifuga ed è diretta
verso l’esterno ed ha modulo pari a mv 2/r.
Più in generale consideriamo un sistema di riferimento inerziale Oxy e un altro sistema di riferimento O0 x0 y 0 in moto
rispetto al precedente (per semplicità consideriamo il caso
di due dimensioni). Per il vettore posizione di un punto P
nei due sistemi si ha
−−→0 −−→0
−
−
→
P O = P O + OO
derivando rispetto al tempo si trova la relazione tra le velocità nei due sistemi di riferimento
~vP O = ~vP O0 + ~vOO0
(∗)
dove ~vOO0 è la velocità del riferimento O0 x0 y 0 rispetto a Oxy.
Se il riferimento O0 x0 y 0 è inerziale, cioè si muove di moto
rettilineo uniforme rispetto al riferimento Oxy, la velocità
~vOO0 è costante: derivando rispetto al tempo la relazione (*)
si ottiene
~aP O = ~aP O0
le accelerazioni nei due riferimenti sono le stesse e non vi
sono forze fittizie.
Se il sistema O0 x0 y 0 non si muove di moto rettilineo uniforme ma ha un moto rototraslatorio qualsiasi, derivando la
relazione (*) si ha
~aP O = ~aP O0 + ~atr + ~aCr
dove
~aP O = accelerazione rispetto al sistema xy
~aP O0 = accelerazione rispetto al sistema x’y’
~atr = accelerazione di trascinamento
~aCr = accelerazione di Coriolis
le accelerazioni nei due riferimenti sono diverse e nel riferimento O0 x0 y 0 sono presenti delle forze fittizie.