Componenti di manipolazione
SERVOLINE
QUICK START
Versione I/O
507906
Edizione 09/02
I:\Transfer\Servoline\Quick-Start
12.09.2002
QUICK START (versione I/O)
Edizione 09/02
Indice delle modifiche
Edizioni sinora pubblicate:
Edizione
05/02
09/02
Osservazioni
Prima edizione
Correzioni
Capitolo 2.9 Schema di allacciamento Start_MT No. x
Capitolo 2.10 Schema di allacciamento FError
Capitolo 5.1 FError (morsetto X11B/5)
Capitolo 5.2 FError (morsetto X11B/5)
Articolo numero
507906
507906
I
QUICK START (versione I/O)
Edizione 09/02
1. GENERALI ................................................................................................................1
1.1
Introduzione
1
1.2
Documenti
1
1.3
Pericoli e avvertenze di sicurezza
1
1.4
Impiego conforme allo scopo
2
1.5
Descrizione del software
2
1.6
Condizioni preliminari
3
2. CABLAGGIO ............................................................................................................3
2.1
Allacciamento dell'interruttore di riferimento (punto zero del servoasse) al servoamplif. 3
2.2
Allacciamento alla rete (X0)
2.3
Allacciamento del resolver (X2)
4
2.4
Allacciamento della tensione ausiliaria 24V (X4)
5
2.5
Circuito intermedio (X7)
5
2.6
Resistenza zavorra esterna (X8)
5
2.7
Allacciamento del motore (X9)
5
2.8
Encoder (X1)
5
4
2.9
Entrate di comando digitali dell'amplificatore (X3; X11B e X11A)
6
2.9.1
Descrizione delle funzioni delle entrate digitali........................................................................6
2.10
Uscite di comando digitali dell'amplificatore (X3; X11B)
7
2.10.1
Descrizione delle funzioni delle uscite digitali .........................................................................7
2.11
Emulazione encoder (X6)
8
2.12
Allacciamento PC, interfaccia RS232 (X6)
8
3. SETUP DELL'AMPLIFICATORE ..............................................................................8
3.1
Setup delle entrate
3.2
Setup dei cicli di traslazione
10
8
3.3
Fine della parametrazione
12
4. ACCENSIONE E SPEGNIMENTO DEGLI APPARECCHI. ....................................13
5. SVOLGIMENTO DI UN CICLO DI TRASLAZIONE ................................................14
5.1
Traslazione di referenziamento
15
5.1.1
Avvio della traslazione di referenziamento............................................................................15
5.1.2
Traslazione di referenziamento eseguita ..............................................................................15
5.1.3
Arresto della traslazione di referenziamento .........................................................................15
5.2
Ciclo di traslazione numero 1 rispettivamente A0
15
5.2.1
Avviamento del ciclo di traslazione A0 ..................................................................................15
5.2.2
Ciclo di traslazione A0 eseguito ............................................................................................15
5.2.3
Arresto del ciclo di traslazione...............................................................................................15
6. APPENDICE ...........................................................................................................16
6.1
Sigle
16
6.2
Glossario
16
6.3
Messaggi di errore
17
6.4
Allarmi
18
6.5
Schema elettrico
19
II
QUICK START (versione I/O)
Edizione 09/02
III
QUICK START (versione I/O)
1.
Generali
1.1
Introduzione
Edizione 09/02
Questo manuale fornisce la procedura di principio da seguire nella messa in esercizio di un servoasse in
base ad un esempio pratico. L'impianto è costituito da un PLC di comando, un servoamplificatore
equipaggiato con scheda I/O e un servoasse. Il manuale descrive passo a passo tutte le fasi necessarie
alla messa in esercizio, mentre il cliente deve provvedere alla programmazione del PLC.
1.2
Documenti
Questo manuale fa parte della documentazione complessiva dei prodotti SERVOLINE. La
documentazione complessiva comprende i seguenti documenti:
Articolo n.
Denominazione
507037
Quick Start (versione I/O)
In questo Manuale di istruzioni per l'uso vengono spiegati gli interventi minimi necessari per
il funzionamento di un servoasse. Vengono indicati anche riferimenti incrociati ai
corrispondenti manuali d'uso.
507001
Software di messa in esercizio (versione I/O)
Il Manuale di istruzioni per l'uso Montech Software di messa in esercizio è denominato qui
di seguito BMIS. Esso contiene informazioni dettagliate per la regolazione del
servoamplificatore.
507019
Servoamplificatore (versione I/O)
Il Manuale di istruzioni per l'uso Montech servoamplificatore è denominato qui di seguito
BMS. Esso contiene informazioni dettagliate per il montaggio ed il cablaggio del
servoamplificatore.
Diverse
Montaggio meccanico dei prodotti SERVOLINE
Il Manuale di istruzioni per l'uso Montech Parte meccanica è denominato qui di seguito
BMM. Esso contiene informazioni dettagliate per il montaggio ed il cablaggio del servoasse.
La documentazione è disponibile nelle lingue tedesco.
1.3
Pericoli e avvertenze di sicurezza
Leggere a fondo la presente documentazione prima della messa in esercizio. Un
utilizzo errato degli apparecchi può causare danni a persone o cose e condurre alla perdita
dei diritti alla garanzia. I dati tecnici e le indicazioni relative alle condizioni d'allacciamento
vanno rispettati in ogni caso.
Soltanto personale specializzato qualificato può procedere a lavori come
l'installazione, la messa in esercizio e la manutenzione. Questo personale specializzato
qualificato è composto da persone che conoscono a fondo l'installazione, il montaggio, la
messa in esercizio e il funzionamento del prodotto e che dispongono delle qualifiche
necessarie per la loro attività. Il personale specializzato deve conoscere e rispettare le
norme e le direttive seguenti:
IEC 364 rispettivamente CENELEC HD 384 oppure DIN VDE 0100
IEC-Report 664 oppure DIN VDE 0110
Prescrizioni antinfortunistiche nazionali, oppure VBG4
Vedere anche BMIS Capitolo 1.1, BMS Capitolo da 1.3 a 1.5 e BMM Capitolo „Pericoli“
1
QUICK START (versione I/O)
1.4
Edizione 09/02
Impiego conforme allo scopo
Il software per la messa in esercizio serve a modificare ed a memorizzare i parametri di funzionamento
del servoamplificatore dei prodotti SERVOLINE. Il servoamplificatore collegato viene messo in funzione
con l'ausilio del software - nel far questo, si può comandare direttamente l'azionamento con le funzioni di
allestimento macchina. Senza interventi aggiuntivi che tengano conto delle caratteristiche specifiche del
PC, queste funzioni non sono sicure dal punto di vista funzionale. Il programma del PC può venire
disturbato o arrestato improvvisamente, per cui in caso di anomalia può risultare impossibile arrestare dal
PC movimenti già avviati.
Il produttore dell'impianto deve preparare un'analisi dei pericoli presentati dall'impianto stesso ed è
responsabile della sicurezza di funzionamento, meccanica e del personale dell'impianto. Ciò vale in
particolar modo per l'attivazione di movimenti con l'ausilio di funzioni del software di messa in esercizio.
I blocchi dati memorizzati su supporti elettronici non sono protetti da modifiche non
autorizzate da parte di terzi. Pertanto dopo il caricamento di un blocco dati si devono
sempre controllare tutti i parametri, prima di autorizzare il funzionamento del
servoamplificatore.
I servoamplificatori vengono installati come componenti in impianti o macchine elettrici e possono venire
messi in funzione unicamente come componenti integrati dell'impianto.
Il contatto BTB deve essere integrato nel circuito di sicurezza dell'impianto. Il circuito di sicurezza, le
funzioni di stop e disinserimento d'emergenza devono soddisfare i requisiti posti dalle norme EN60204,
EN292 e VDI2853.
Prima della messa in esercizio dei servoassi, si devono eseguire tutti i lavori previsti dalle istruzioni per
l’uso del servoamplificatore e degli assi Servoline. Attenersi alle prescrizioni sulla sicurezza.
Montaggio, installazione, cablaggio e controllo finale vanno eseguiti conformemente alle
istruzioni per l’uso del servoamplificatore.
Montaggio, installazione e controllo finale vanno eseguiti conformemente alle istruzioni
per l’uso dei servoassi.
Vedere anche BMS Capitolo 1.6 bis 1.8 rispettivamente BMM Capitolo dichiarazione di
conformità CE
1.5
Descrizione del software
Il servoamplificatore va adattato alle condizioni dell'applicazione (posizione di destinazione,
accelerazione, velocità ecc.). Questa parametrazione non viene eseguita sull'amplificatore stesso, bensì
su un Personal Computer (PC) con l'ausilio del software di messa in esercizio. Il PC è collegato
(serialmente) al servoamplificatore con un cavo Nullmodem. Il software per la messa in esercizio realizza
la comunicazione tra il PC ed il servoamplificatore.
In modo semplice si possono cambiare i parametri e vedere subito l'effetto delle modifiche
sull'azionamento, in quanto esiste un collegamento permanente (collegamento online) con l'amplificatore.
Contemporaneamente, si possono leggere dall'amplificatore e visualizzare sullo schermo i valori effettivi
importanti.
I blocchi di dati possono venire memorizzati (archiviati) su un supporto e ricaricati.
Il blocco dati attuale può venire stampato.
2
QUICK START (versione I/O)
1.6
Edizione 09/02
Condizioni preliminari
Il servoasse è stato montato in modo sicuro secondo le „Istruzioni per l'uso parte meccanica“ Capitolo
„Informazioni importanti e installazione“.
Il servoamplificatore è stato montato in modo sicuro secondo il manuale BMS Cap. 1 e 3.
Il servoamplificatore è equipaggiato con una scheda di espansione I/O. A sua volta, la scheda di
espansione I/O è equipaggiata con due connettori a 12 poli Mini Combicom.
È disponibile un PC su cui è stato caricato il software Montech AG 2.0.
È disponibile un PLC. Per questa applicazione occorrono 5 uscite digitali e 3 entrate digitali.
Se la tensione ausiliaria 24 V DC non è disponibile dal PLC, si deve prevedere una alimentazione
tensione supplementare da 24V DC.
Le alimentazioni tensione (24 V DC, 240 V AC e 400V AC) sono inattive.
2.
Cablaggio
Cablaggio rispettivamente cablaggio del PLC, del servoamplificatore e del servoasse.
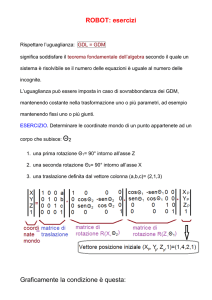
2.1
Allacciamento dell'interruttore di riferimento (punto zero del
servoasse) al servoamplificatore
Il cablaggio del proximity avviene secondo il seguente schema.
Vedere anche BMS Capitolo 4.2 e BMM Capitolo „Installazione“ paragrafo „Allacciamento del proximity
induttivo“.
marrone
BRAUN
PNP
blu
BLAU
+24VDC
L+
DGND
M
SPS PS
(Power Supply)
Servoamplif.
Servoverstärker
nero
SCHWARZ
X11A
9
3
QUICK START (versione I/O)
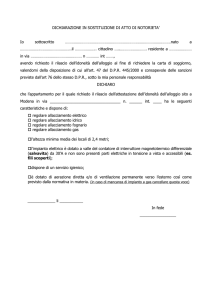
2.2
Edizione 09/02
Allacciamento alla rete (X0)
Direttamente alla rete trifase messa a terra, 400V, 50Hz, filtro classe A integrato.
Protezione 6AT, per es. fusibile.
Il morsetto X0/B è inutilizzato. Viene utilizzato per trasmettere l'alimentazione tensione ad altri
servoamplificatori.
Vedere anche BMS Capitolo 4.3.1
Servoverstärker
X0 A
L1
400VAC
6A
L2
L3
PE
X0 B
2.3
NICHT
Non collegato
ANGESCHLOSSEN
Allacciamento del resolver (X2)
Il cavo del resolver trasmette i segnali del resolver bipolare ad albero cavo e del contatto di protezione
termica.
Utilizzare il cavo di allacciamento che fa parte della fornitura. Il cavo di allacciamento è schermato e
trainabile. Collegare il resolver (integrato nel motore del servoasse) al morsetto X2 sull'amplificatore.
Vedere anche BMS Capitolo 4.5 e BMM Capitolo „Installazione“ paragrafo „Allacciamento del cavo del
motore e del resolver“.
4
QUICK START (versione I/O)
2.4
Edizione 09/02
Allacciamento della tensione ausiliaria 24V (X4)
La tensione ausiliaria viene deviata dal modulo di alimentazione elettrica PS del PLC. L'allacciamento
avviene secondo il seguente schema.
Allacciare il modulo di alimentazione elettrica alla rete bifase, 230V, 50Hz.
Vedere anche BMS Capitolo 4.3.2
SPS PS
(Power supply)
Servoverstärker
L1
X4
+24VDC
XGND
2.5
1
L+
3
M
N
PE
Circuito intermedio (X7)
Funzione: collegamento in parallelo delle potenze di carico su tutti gli amplificatori collegati. Dato che
nella nostra applicazione non utilizziamo resistenze zavorra e solo un amplificatore, questo morsetto non
è necessario. Il morsetto è inutilizzato.
2.6
Resistenza zavorra esterna (X8)
Dato che in questa applicazione non vengono impiegate resistenze zavorra esterne, si deve controllare
che sia presente il ponticello sul connettore X8/-RB e X8/Int.. Altrimenti montarne uno.
2.7
Allacciamento del motore (X9)
Utilizzare il cavo di allacciamento facente parte della fornitura. Il cavo di allacciamento è schermato e
festonabile.
Collegare il motore del servoasse con il morsetto X9 dell'amplificatore.
Vedere anche BMS Capitolo 4.4 e BMM Capitolo „Installazione“ paragrafo „Allacciamento del cavo del
motore e del resolver“.
2.8
Encoder (X1)
Questo allacciamento non è necessario. L'allacciamento/ il morsetto sono inutilizzati.
Vedere anche BMS Capitolo 4.5.2
5
QUICK START (versione I/O)
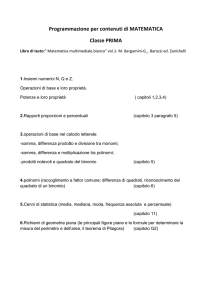
2.9
Edizione 09/02
Entrate di comando digitali dell'amplificatore (X3; X11B e X11A)
L'allacciamento dei cavi avviene come illustrato nel seguente schema. Caratteristiche del cavo fino a 50
m: 0,5mm², non schermato.
Vedere anche BMS Capitolo 4.6.1 e 4.6.2
Servoamplificatore
(entrata digitale)
Servoverstärker
(Digital EIN)
SPS DO
(Digital AUS)
X3
RESET (DIGITAL-IN1)
ENABLE
DGND
X11B
START_MT No. x
24 VDC
I/O GND
X11A
A0
A1
FError_clear
(uscita digitale)
11
A
15
A
18
M
2
11
A
4 AT
12
1
2
L+
GND
A
A
10
2.9.1 Descrizione delle funzioni delle entrate digitali
Reset (DIGITAL_IN1) Reset software del servoamplificatore in caso di anomalia. Tutte le funzioni e
visualizzazioni vengono riportate allo stato di partenza. I parametri non
memorizzati nell'EEPROM vengono cancellati, viene caricato il blocco parametri
memorizzato nell'EEPROM. In presenza dei messaggi di errore F01, F02, F03,
F05, F08, F13, F16 oppure F19 (Capitolo 6.3), il reset software non viene eseguito,
bensì viene soltanto cancellato il messaggio di errore. In questo modo, per es. i
segnali in uscita dall'encoder sono stabili e il controllore può continuare a
processarli.
Vedere anche BMIS Capitolo 2.7.1.1
Enable
Abilitazione dello stadio finale del servoamplificatore (high= attivo). In stato di
"disabilitato"(segnale low), il motore allacciato non ha coppia torcente.
Vedere anche BMS Capitolo 4.6.1.1
Start_MT No.x
Avviamento di un ciclo di traslazione memorizzato nel servoamplificatore con
indicazione del numero del ciclo di traslazione, presente codificato in bit sulle
entrate da A0 a A7. Il numero del ciclo di traslazione “0” avvia la traslazione di
referenziamento. Un fianco positivo avvia il ciclo di traslazione, un fianco negativo
lo interrompe.
Vedere anche BMIS Capitolo 2.6.1.1
A0 oppure A1
Numero pacchetto dati 1 rispettivamente numero pacchetto dati 2
Vedere anche BMIS Capitolo 2.6.1.1
FError_clear
Un fianco positivo sull'entrata digitale cancella un allarme eventualmente presente
(errore d'inseguimento/sorveglianza d'intervento).
Vedere anche BMIS Capitolo 2.6.1.1
6
QUICK START (versione I/O)
Edizione 09/02
2.10 Uscite di comando digitali dell'amplificatore (X3; X11B)
L'allacciamento dei cavi avviene come illustrato nel seguente schema. Caratteristiche del cavo fino a 50
m: 0,5mm², non schermato.
Vedere anche BMS Capitolo 4.6.3 e 4.6.4
Servoamplificatore
(entrata digitale)
Servoverstärker
(Digital AUS)
X3
2
BTB/RTO
X11B
IN POS
FError
2.10.1
BTB/ RTO
SPS DI
(Digital digitale)
EIN)
(uscita
3
3
5
L+
E
E
E
Descrizione delle funzioni delle uscite digitali
Lo stato di "pronto per l'esercizio" viene segnalato tramite il contatto a potenziale
zero di un relè. Il contatto è chiuso con il servoamplificatore pronto per l'esercizio. Il
2
segnale di abilitazione "Enable", la limitazione I t e la soglia di carico non
influiscono sul contatto.
Tutti gli errori provocano la diseccitazione del contatto BTB ed il
disinserimento dello stadio finale. Si può trovare un elenco dei messaggi di
errore al Capitolo 6.3.
Vedere anche BMS Capitolo 4.6.3.1
InPos
Il raggiungimento della posizione di destinazione (finestra "In posizione") di un ciclo
di traslazione viene segnalato dall'invio di un segnale High. Quando viene eseguita
automaticamente una serie di cicli di traslazione consecutivi, il messaggio viene
lanciato per il raggiungimento della posizione finale della sequenza di cicli di
traslazione (posizione di destinazione dell'ultimo ciclo di traslazione).
Vedere anche BMIS Capitolo 2.6.1.2
FError
L'abbandono della finestra di errore d'inseguimento impostata viene segnalato con
un segnale Low.
Vedere anche BMIS Capitolo 2.6.1.2
7
QUICK START (versione I/O)
Edizione 09/02
2.11 Emulazione encoder (X6)
Questo allacciamento non è necessario. L'allacciamento/ il morsetto sono inutilizzati.
Vedere anche BMS Capitolo 4.7
2.12 Allacciamento PC, interfaccia RS232 (X6)
Collegare l'interfaccia PC (X6) del servoamplificatore con le tensioni di alimentazione disattivate
tramite il cavo Nullmodem con una interfaccia seriale del PC (non utilizzare una linea NullmodemLink!).
Scollegare e collegare il cavo di trasmissione solamente quando le tensioni di
alimentazione (amplificatore e PC) sono disattivate.
L'interfaccia è separata galvanicamente tramite fotoaccoppiatori ed ha lo stesso potenziale dell'interfaccia
CANopen.
Vedere anche BMS Capitolo 4.8
3.
Setup dell'amplificatore
In questo capitolo come impostare le entrate dell'amplificatore ed i parametri dei cicli di traslazione.
Accendere il PC e il servoamplificatore (24 VDC; 400 VAC).
3.1
Setup delle entrate
Si apre la schermata del PC <<Desktop>>.
Fare doppio clic sull'icona Servoline (se non è presente, caricare nuovamente il Firmware). Vedere al
proposito il manuale BMIS Capitolo 1.6.
Si apre la schermata <<Comunicazione>>. Vedere anche BMIS Capitolo 1.9.
Cliccare sull'interfaccia idonea, rispettivamente COM1 oppure COM2 a seconda dell'allacciamento del
cavo Nullmodem.
Si apre la schermata <<Asse lineare>> con il logo MONTECH Logo in alto a destra. Vedere anche BMIS
Capitolo 2.3.
8
QUICK START (versione I/O)
Edizione 09/02
Cliccare sul pulsante di comando <<I/O digital X3>>.
Si apre la schermata <<I/O digital 1>>. Vedere anche BMIS Capitolo 2.7.
Premere il tasto <<F12>> della tastiera, in questo modo si attiva il blocco. Si può selezionare questa
funzione anche sulla schermata <<Asse lineare>> sotto Disable (F12).
Nel campo <<DIGITAL-IN1/Funktion>> cliccando sulla freccia selezionare la funzione <<RESET>>.
Cliccare su OK per ritornare sulla schermata<<Asse lineare>> con il logo MONTECH in alto a destra.
Alla domanda: <<Memorizzazione dati nell'EEPROM & reset dell'amplificatore>> cliccare su <<Sì>>
9
QUICK START (versione I/O)
3.2
Edizione 09/02
Setup dei cicli di traslazione
Cliccare sul campo Dati di posizionamento.
Si apre la schermata <<Dati di posizionamento>>. Vedere anche BMIS Capitolo 2.4.
Digitare i dati desiderati (nel nostro esempio sono necessari due cicli di traslazione) (il ciclo di traslazione
<<0>> si può descrivere soltanto in un sistema di Feldbus). Per rilevare i dati, cliccare sul pulsante di
comando <<Valore di default>> nel campo <<Allestimento>> a sinistra della tabella.
10
QUICK START (versione I/O)
Edizione 09/02
Si apre la schermata <<Valori di default>>. Vedere anche BMIS Capitolo 2.4.4.1.
Sotto <<Genere>> selezionare <<ABS>> (ciclo di traslazione assoluto) cliccando sulla freccia e
selezionando dall'elenco <<ABS>>.
Sotto <<v_soll>> digitare il valore desiderato, per es.<<1‘000‘000>> cioè la velocità in PV&RQIHUPDUH
la digitazione con <<Return>>. Si può rilevare il valore limite (valore massimo) dal manuale BMIS
Capitolo 2.15.2.
2
Sotto <<acc>> digitare il valore desiderato, per es. <<3‘750>> cioè die accelerazione in mm/s .
Confermare la digitazione con <<Return>>. Si può rilevare il valore limite (valore massimo) dal manuale
BMIS Capitolo 2.15.2.
2
Sotto <<dec>> digitare il valore desiderato, per es. <<3‘750>> cioè l'accelerazione di frenata in mm/s .
Confermare la digitazione con <<Return>>. Si può rilevare il valore limite (valore massimo) dal manuale
BMIS Capitolo 2.15.2.
Sotto <<Ciclo successivo>> selezionare <<Senza>> cliccando sulla freccia e selezionando dall'elenco
<<Senza>>.
Cliccare su <<OK>> per memorizzare i dati nell'EEPROM. In questo modo ci si trova direttamente nella
schermata <<Dati di posizionamento>>.
Premere il tasto <<F12>> della tastiera, in questo modo lo stadio finale viene bloccato.
Fare doppio clic sul tasto di comando <<Genere. - n. 1>> e selezionare <<ABS>>. I campi di digitazione
v_soll; acc; dec e ciclo successivo vengono scritti automaticamente con i valori immessi nella finestra
<<Valori di default>>. Ora viene scritto il campo s_soll.
)DUHGRSSLRFOLFVXOWDVWRGLFRPDQGR1UVBVROO> P@!!HGLJLWDUHLOYDORUHGHVLGHUDWRSHUHV
!!6LWUDWWDGHOODFRUVDLQ P&RQIHUPDUHODGLJLWD]LRQHFRQ5HWXUQ!!
In questo modo è stato definito completamente il primo ciclo di traslazione. La slitta del servoasse
raggiungerà la posizione 200'000 PLQGLSHQGHQWHPHQWHGDOODSRVL]LRQHDWWXDOHFRQOHFRUULVSRQGHQWL
accelerazioni e velocità.
Fare doppio clic sul tasto di comando <<Genere. - n. 2>> e selezionare <<ABS>>. I campi di digitazione
v_soll; acc; dec e ciclo successivo vengono scritti automaticamente con i valori immessi nella finestra
<<Valori di default>>. Ora viene scritto il campo s_soll.
)DUHGRSSLRFOLFVXOWDVWRGLFRPDQGR1UVBVROO> P@!!HGLJLWDUHLOYDORUHGHVLGHUDWRSHUHV
!!6LWUDWWDGHOODLQ P&RQIHUPDUHODGLJLWD]LRQHFRQ5HWXUQ!!
In questo modo è stato definito completamente il secondo ciclo di traslazione. La slitta del servoasse
raggiungerà la posizione 0 PSXQWRGLULIHULPHQWRLQGLSHQGHQWHPHQWHGDOODSRVL]LRQHDWWXDOHFRQOH
corrispondenti accelerazioni e velocità.
Cliccare su <<OK>> per memorizzare i dati nell'EEPROM. In questo modo ci si trova direttamente nella
schermata <<Asse lineare>> con il logo MONTECH in alto a destra.
11
QUICK START (versione I/O)
3.3
Edizione 09/02
Fine della parametrazione
L'inizializzazione dell'amplificatore è terminata. Si può ritornare al livello del desktop di Windows.
Cliccare sul pulsante di comando <<Terminare l'elaborazione>> e rispondere con <<Sì>> alla domanda
<<Terminare>>.
Si ritorna alla schermata <<Comunicazione>>.
Sotto <<File>> selezionare <<Terminare>>.
Si apre la schermata „Desktop“- Livello del PC
12
QUICK START (versione I/O)
4.
Edizione 09/02
Accensione e spegnimento degli apparecchi.
Lo schema riportato qui di seguito illustra la sequenza corretta dal punto di vista funzionale per
l'accensione e lo spegnimento del servoamplificatore.
Vedere anche BMS Capitolo 2.1.
U
24V
X4
t
U
BTB/RTO
X3/2,3
t
< 5s (Boot-time)
U
L1,L2,L3
X0
t
Circuito intermedio
U
Zwischenkreis
X7
~ 500 ms
~ 5 min
t
U
ENABLE
X3/15
t
13
QUICK START (versione I/O)
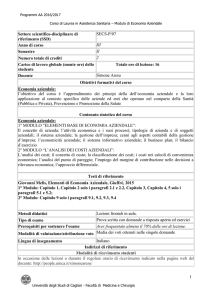
5.
Edizione 09/02
Svolgimento di un ciclo di traslazione
Traslazione di referimento
Referenzfahrt
Commessa trasl. 1
Fahrauftrag 1
Commessa trasl. 2
Fahrauftrag 2
V
Diagramma
Geschwindikeitvelocità-tempo
Zeit Diagramm
5.1
Zero point
Nullpunkt
Nullpunkt
Punto zero
Nullpunkt
S
Weg-Zeit
Diagramma
corsa-tempo
Diagramm
Schleppfehler-Fenster
Punto zero
Finestra errore d'inseguimento
t
t
U
ENABLE
X3/15
> 10 ms
t
U
Start_MT No.x
X11B/2
t
U
A0
X11A/1
> 10 ms
t
U
A1
X11A/2
> 10 ms
t
U
In Pos
X11B/3
Nachstellzeit
Nachstellzeit
t
Tempo
Tempod‘azione
d‘azione
14
QUICK START (versione I/O)
Edizione 09/02
Traslazione di referenziamento
Condizioni preliminari (stato del segnale):
Software Enable (tastiera <<Shift + F12>>)
Hardware Enable (morsetto X3/15)
A0 bis A7 (morsetti X11/1 bis 8)
FError (morsetto X11B/5)
START_MT No.x (morsetto X11B/2)
5.1.1
: Enable
: high
: low
: high
: commutare da low a high
Avvio della traslazione di referenziamento
La traslazione di referenziamento viene avviata quando sul morsetto X11B/2 (Start_MT No.x) è presente
un segnale „high“ ed è presente un segnale „low“ sui morsetti X11A/1 bis 8 rispettivamente da A0 a A7.
5.1.2
Traslazione di referenziamento eseguita
Durante la traslazione di referenziamento può succedere che la slitta del servoasse superi il punto zero,
rispettivamente che il segnale In Pos sia „high“ e la slitta non si trovi sul punto zero. Questo
comportamento dipende dalla rampa di frenatura rispettivamente di accelerazione e dalla grandezza del
servoasse. Per garantire che la slitta raggiunga il punto zero, il segnale Start_MT No.x dovrebbe
diminuire con ritardo, quando il segnale In Pos segnala un segnale „high“ (tempo d'azione del segnale In
Pos. nello schema riportato sopra).
5.1.3
Arresto della traslazione di referenziamento
La traslazione di referenziamento può venire interrotta in qualsiasi momento togliendo il segnale di start
(START_MT No.x). Quindi l'azionamento frena con l'accelerazione di frenata impostata fino ad arrestarsi
completamente e resta fermo in questa posizione accoppiato dinamicamente.
5.2
Ciclo di traslazione numero 1 rispettivamente A0
Condizioni preliminari (stato del segnale):
Software Enable (tastiera <<Shift + F12>>)
Punto di riferimento
Enable (morsetto X3/15)
A0 (morsetto X11/1)
FError (morsetto X11B/5)
START_MT No.x (morsetto X11B/2)
5.2.1
: Enable
: impostato
: high
: high
: high
: commutare da low a high
Avviamento del ciclo di traslazione A0
Il ciclo di traslazione viene avviata quando sul morsetto X11B/2 (Start_MT No.x) e X11A/1 (A0) è
presente un segnale „high“. Dove il segnale del ciclo di traslazione A0 deve essere presente per almeno
10 ms sul rispettivo morsetto, prima che venga lanciato il segnale „high“ Start_MT No.x.
5.2.2
Ciclo di traslazione A0 eseguito
Per garantire che la slitta raggiunga la posizione indicata, se il segnale Start_MT No.x diminuisse in
ritardo, se il segnale In Pos segnala un segnale „high“ (tempo d'azione del segnale In Pos nello schema
riportato sopra).
5.2.3
Arresto del ciclo di traslazione
Il ciclo di traslazione può venire interrotta in qualsiasi momento togliendo il segnale il segnale di start
(START_MT No.x). Quindi l'azionamento frena con l'accelerazione di frenata impostata fino ad arrestarsi
completamente e resta fermo in questa posizione accoppiato dinamicamente. Il ciclo di traslazione
interrotto ponendo il segnale di start START_MT No.x).
15
QUICK START (versione I/O)
6.
Appendice
6.1
Sigle
Edizione 09/02
Nella tabella vengono spiegate le abbreviazioni utilizzate in questo manuale.
Sigle
A0 bis A7
BMIS
BMM
BMS
BTB/RTO
COM
DGND
I/O GND
SPS
V AC
V DC
XGND
6.2
Significato
Ciclo di traslazione codificato binario (entrate amplificatore)
Manuale di istruzioni per l'uso Montech Software di messa in esercizio
(versione I/O). Numero articolo 507001
Manuale di istruzioni per l'uso Montech Parte meccanica. Diversi numeri
articolo
Manuale di istruzioni per l'uso Montech servoamplificatore (versione I/O).
Numero articolo 507019
Pronto per l'esercizio
Interfaccia seriale di un PC-AT
Massa digitale
Massa digitale della scheda di espansione I/O
Controllore a memoria programmabile
Tensione alternata
Tensione continua
Massa della tensione di alimentazione 24V
Glossario
C
CPU
E
EEPROM
F
E PROM
Enable
Fahrsatz
I
I/O
R
S
Reset
Start_MT No.x
2
Central Processing Unit
Processore centrale del PLC
Electrically Erasable and Programable Read-Only Memory
Memoria fissa cancellabile elettricamente nel servoamplificatore.
I dati memorizzati nell'EEPROM non vanno persi quando si toglie la
tensione ausiliaria.
Vedere EEPROM
Segnale di abilitazione per il servoamplificatore
Blocco dati con tutti i parametri di regolazione della posizione necessari
per un ciclo di traslazione.
Input/Output
Entrate/ Uscite (scheda di espansione nel servoamplificatore)
Riavviamento del microprocessore
Start_MultiTask No.x
Start_Ciclo di traslazione n. x
16
QUICK START (versione I/O)
6.3
Edizione 09/02
Messaggi di errore
Tutti gli errori che si verificano vengono visualizzati consecutivamente ciascuno con 4 cicli di lampeggio.
Tutti i messaggi di errore provocano l'apertura del contatto BTB (morsetto X3/2 e X3/3), all'arresto
guidato dell'azionamento (frenatura con rampa di emergenza) ed al disinserimento dello stadio finale
dell'amplificatore (il motore non sviluppa più coppia torcente). Viene attivato il freno motore (solo SVA130).
Numero
F01*
Denominazione
Temperatura del
termodispersore
Sovratensione
Spiegazione
Temperatura del termodispersore troppo alta.
F03*
F04
F05*
Errore di inseguimento
Messaggio del regolatore di posizione
Ritorno d'informazione
Rottura di cavo, cortocircuito, contatto a terra
Sottotensione
Sottotensione nel circuito intermedio.
F06
Temperatura motore
Sensore temperatura guasto o temperatura motore eccessiva.
F07
F08*
F09
F10
F11
F12
F13*
F14
F15
F16*
F17
F18
F19*
F20
F21
F22
F23
F24-F31
F32
Tensione ausiliaria
Valore limite impostato su 145°C dal produttore
Tensione ausiliaria interna non corretta
Motore va in fuori giri, velocità di rotazione eccessiva
F02*
Valore limite impostato su 80°C dal produttore
Sovratensione nel circuito intermedio.
Valore limite in funzione della tensione di rete
Valore limite impostato su 100V dal produttore
Survelocità
EEPROM
Flash-EPROM
Freno
Fase motore
Errore di checksum
Errore di checksum
Temperatura interna
Stadio finale
Eccessiva temperatura interna dell'amplificatore
Guasto allo stadio di potenza finale
I²t max.
BTB della rete
Convertitore A/D
Carico
Superato il valore massimo I²t
Mancanza di 2 oppure 3 fasi dell'alimentazione
Rottura di cavo, cortocircuito, contatto a terra (solo SVA)
Mancanza fase motore (rottura di cavo o simili)
Fase di rete
Errore di slot
Errore nella conversione analogica - digitale
Circuito di carico guasto oppure impostazione errata
Mancanza di una fase dell'alimentazione
Errore hardware della scheda di espansione
Errore di manipolazione
Contatto a terra
CAN Bus inattivo
Riservato
Errore di sistema
Errore software della scheda di espansione
inattivo
Interruzione comunicazione CAN Bus
riservato
Il sistema non reagisce correttamente
* = Questi messaggi d'errore possono essere resettati senza avviamento a freddo. Quando si verifica uno
solo di questi errori e s'impiega il tasto RESET oppure la funzione I/O RESET, l'errore viene resettato
senza bisogno di avviamento a freddo.
17
QUICK START (versione I/O)
6.4
Edizione 09/02
Allarmi
Tutti gli allarmi che si verificano vengono visualizzati consecutivamente ciascuno con 4 cicli di lampeggio
Le anomalie che non provocano il disinserimento dello stadio finale dell'amplificatore (il contatto BTB
rimane chiuso), sono codificati sul display a LED sul pannello frontale mediante un numero d'allarme e
visualizzati nella schermata “STATO”. Gli allarmi identificati dalla sorveglianza di rete, vengono segnalati
solamente dopo l'abilitazione (Enable) del servoamplificatore.
Numero
n01
n02
n03*
n04*
Denominazione
I²t
Potenza di carico
n10*
FError
Sorveglianza
d'intervento
Fase della rete
SW-Limit switch 1
SW-Limit switch 2
Errore_ciclo di
traslazione
Nessun punto di
riferimento
PSTOP
n11*
NSTOP
n12
n13
n14
n15
n16-n31
n32
A
Scheda di espansione
HIPERFACE®
Errore tabella
Riserva
Firmware Betaversion
Reset
n05
n06*
n07*
n08
n09
Valori di default
Spiegazione
Superata la soglia di segnalazione I²t.
Raggiunta la potenzia di carico impostata.
Superata la finestra di errore d'inseguimento impostata
Sorveglianza d'intervento (Feldbus) attiva
Mancanza di una fase della rete
Superato finecorsa software 1
Superato finecorsa software 2
Avviato un ciclo di traslazione errato
All'avviamento del ciclo di traslazione non c'era nessun punto di
riferimento impostato
Azionato finecorsa hardware PSTOP (servoassi senza
finecorsa hardware)
Azionato finecorsa hardware NSTOP (servoassi senza
finecorsa hardware)
inattivi
La scheda di espansione non funziona correttamente
inattivo
inattivo
Riserva
La versione Firmware non è abilitata
È presente un RESET su DIGITAL IN1
* = Questi messaggi di allarme provocano l'arresto guidato dell'azionamento (frenatura con rampa di
emergenza)
18
QUICK START (versione I/O)
6.5
Edizione 09/02
Schema elettrico
Servoamplificatore
Controllore
Circuito di
sicurezza
+24V verso
massa I/O
$QDOLVLHQFRGHU
6ODYH0DVWHU
$PSOLILFDWRUH
Contatto termoprotezione incl.
(Q'$70XOWLWXUQ
DGDOWDULVROX]
compr.contatto
protez.termica
Resolver
verso altri servoamplificatori
3URWH]LRQH
D]LRQDP
$OLPHQWDW
9'&
Allacciam. PE (messa a terra)
Collegam. massa (piastra mont.)
Allacciam. schermo nel connettore
verso altri servoamplificatori
19
QUICK START (versione I/O)
Edizione 09/02
20