Istituto Tecnico Industriale Aldini – Valeriani
CLASSE 5C MECCANICA
A.S. 2001/2002
Area di progetto:
“RUOTE DENTATE ELLITTICHE”
“ELLIPTICAL GEARS”
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
1
Ringraziamenti:
A nome di tutti, ragazzi ed insegnanti, è doveroso un sentito ringraziamento alla ditta Nanni
Ingranaggi che ci ha dato la possibilità di visitare i propri locali, accogliendoci con esemplare
pazienza e disponibilità, e ha donato all’istituto valido, nonché costoso, materiale per il nostro
studio.
Gli allievi:
Brida Matteo
Cevenini Luca
Elefante Giovanni
Fenara Filippo
Finelli Matteo
Gamberini Federico
Garganelli Marco
Gazzillo Francesco
Giovannini Riccardo
Gruppi Marco
Impastato Davide
Lecca Alessandro
Maestrini Paolo
Pagani Federico
Priori Giacomo
Provenzani Daniele
Reda Ernesto
Simoni Federico
Tibaldi Daniele
Trebbi Francesco
Turrini Simone
Zambelli Andrea
Gli insegnanti
Altavilla Claudio
Bavieri Giulia
Benni Marco
Burnelli Andrea
Canestri Trotti Pier Antonio
Collina Danilo
D’Amore Sandra
Foresti Cosetta
Lorenzetti Giorgio
Masotti Alessandra
Paladino Angiolino
Piotrowska Bozenna
Telmon Andrea
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
2
Indice:
Introduzione
Richiami di matematica: gli angoli, gli archi e la loro misura.
Richiami di matematica: relazioni tra gli elementi di un triangolo qualunque
Il teorema delle proiezioni ed il teorema del coseno.
l’ellisse
Richiami di matematica: definizione di derivata di una funzione di una variabile
Alcune grandezze fisiche definite come derivate di altre
Studio cinematico di una coppia di ruote dentate ellittiche
Legge rotazioni (spostamenti angolari) della ruota condotta in funzione dei
gradi di rotazione della ruota conduttrice
Grafico rotazioni in gradi della ruota condotta in funzione della rotazione
della conduttrice
Legge della velocità angolare della ruota condotta in funzione dei gradi
di rotazione della ruota conduttrice
Diagramma dell’andamento della velocità angolare della ruota condotta
in funzione degli angoli di rotazione della ruota conduttrice
Legge della accelerazione angolare della ruota condotta in funzione
dei gradi di rotazione della ruota conduttrice
Diagramma dell’andamento della accelerazione angolare della ruota
condotta in funzione degli angoli di rotazione della ruota conduttrice
Commento dei grafici
Caratteristiche costruttive
Criteri di scelta delle ruote ellitiche
Istituto Tecnico Industriale Aldini Valeriani Bologna
pag. 3
pag. 5
pag. 6
pag. 7
pag. 10
pag. 15
pag. 18
pag. 21
pag. 21
pag. 21
pag. 25
pag. 25
pag. 27
pag. 27
pag. 29
pag. 33
pag. 35
Area progetto ruote dentate ellittiche
3
Introduzione:
L’energia occorrente al funzionamento delle macchine operatrici è fornita, sotto forma d’energia
cinetica, da macchine motrici (i motori) che la ottengono come risultato finale della trasformazione
d’energia d’altro tipo.
Qualunque sia il tipo di motore, la potenza che esso fornisce è trasmessa ai vari organi della
macchina operatrice, con le modifiche richieste dalle loro specifiche esigenze.
Ad esempio, in un tornio il moto deve andare sia al mandrino sia al carrello portautensili per
realizzare, rispettivamente, il moto di taglio ed il moto d’alimentazione.
Mentre il primo deve muoversi di moto rotatorio il secondo è guidato a spostarsi di moto rettilineo.
Nella maggior parte dei casi perciò non basta limitarsi a trasmettere il moto ma bisogna provvedere
a trasformarlo.
Le accoppiate ruota dentata – vite senza fine, rocchetto e dentiera, biella e manovella, oppure, per
continuare eccentrici, camme e punterie sono tutti meccanismi di trasformazione del moto.
In una nicchia di tale contesto si inseriscono gli ingranaggi ellittici, coppie di ruote dentate ad
interasse costante e profilo complementare aventi la caratteristica di trasformare un moto rotatorio
uniforme in un moto sempre rotatorio ma con velocità angolare variabile nello stesso giro.
Quindi le suddette consentono di modulare la velocità angolare sull’asse d’uscita, restituendo un
moto accelerato/decelerato.
Fino ad ora l’uso degli ingranaggi ellittici è stato poco diffuso, sia per la difficoltà nella loro
costruzione, sia per la particolarità della trasformazione del moto che realizzano.
Esse sono utilizzate da costruttori di macchine da stampa, tessili ed automatiche i quali possono
avere, come già accennato, le seguenti esigenze:
-variare la velocità nell’arco di un giro di una lama, un saldatore, uno spingitore.
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
4
-effettuare movimenti ciclici, posizionamenti rapidi - smorzati,
-dilatare i tempi utili e contrarre i tempi morti in cicli ripetitivi.
Nessun libro di testo di meccanica e disegno tuttavia tratta tale argomento in maniera approfondita.
Proprio la mancanza d’informazioni riguardo tali ruote dentate ci ha spinto a sceglierle come tema
dell’area di progetto. In pratica ci siamo prefissati di rispondere alle stessa domanda che sorge
spontanea nel vedere il catalogo della ditta Nanni Ingranaggi che le produce e commercializza:
“Come funzioneranno?”.
Noi pensiamo di avere risposto in maniera esauriente al suddetto quesito. Buona lettura.
Gli allievi e gli insegnanti della VC meccanica
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
5
Richiami di matematica: gli angoli, gli archi e la loro misura.
Angoli e archi:
Se in un piano si tracciano due semirette aventi l’origine in comune il piano diviso in due parti,
ciascuna delle quali viene chiamata angolo. Le due semirette vengono dette i lati dei due angoli e
l’origine comune il loro vertice.
Data una circonferenza avente il centro nel vertice di un angolo, si chiama arco circolare quella
parte di circonferenza interna all’angolo e avente per estremi i punti di intersezione con i lati
dell’angolo stesso.
Misura degli angoli e degli archi:
Per misurare una grandezza occorre fissare l’unità di misura. Le più usate unità di misura degli
angoli sono il grado ed il radiante.
Si chiama grado la 360° parte dell’angolo giro. I suoi multipli sono il minuto primo ( o
semplicemente primo), che è 1/60 di grado, ed il minuto secondo ( o semplicemente secondo) che è
1/60 di primo.
Si chiama radiante l’angolo al centro di una circonferenza, di raggio arbitrario, che sottende un arco
di lunghezza uguale al raggio stesso (si tenga presente che se un angolo al centro di una
circonferenza sottende un arco lungo quanto il raggio ciò succede per ogni altra circonferenza
concentrica con la prima).
Ovviamente, se la lunghezza dell’arco sotteso è, ad esempio, metà di quella del raggio, l’angolo è di
mezzo radiante; se è doppia di quella del raggio, l’angolo è di due radianti; e così via. L’angolo
giro, che sottende l’intera circonferenza (la cui lunghezza è 2π volte quella del raggio), è di 2π
radianti; l’angolo piatto è di π radianti; l’angolo retto è di π/2 radianti. In generale , la misura in
radianti di un angolo che sottende un arco circolare di lunghezza l, è l/r essendo r il raggio della
circonferenza di cui l’arco è parte.
Per quanto concerne l’unità di misura degli archi circolari risulta conveniente assumere come unità
l’arco in cui angolo al centro corrispondente è l’unità di misura degli angoli. Si ha così l’arco grado,
che è l’arco di circonferenza che corrisponde all’angolo al centro di un grado, e l’arco radiante, che
è l’arco di circonferenza che corrisponde all’angolo al centro di un radiante.
Seguendo questa convenzione la misura di un arco di circonferenza e la misura del corrispondente
angolo al centro sono espresse dallo stesso numero.
E’ di importanza pratica sapere come si passa dalla misura di un angolo (o di un arco) in gradi, alla
misura in radianti dello stesso angolo ( o arco), e viceversa.
Dette x° e x le misure, rispettivamente in gradi ed in radianti, di uno stesso angolo (o arco) si ha:
360:2π = x°: x
Da questa proporzione si ricavano le due formule:
x= x°/180°π
e x°= x/π180°
la prima delle quali dà la misura in radianti, nota quella in gradi, la seconda la misura in gradi, nota
quella in radianti.
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
6
Angoli ed archi orientati e loro misura:
E’ spesso necessario attribuire ad un angolo una orientazione. Un angolo si dice orientato quando i
suoi lati sono considerati in un cero ordine, quando cioè è stabilito quale dei due deve considerarsi
come primo. In tal caso l’angolo può essere pensato come generato dalla rotazione del primo lato
(lato origine) verso il secondo (lato termine), fino alla sovrapposizione dei due.
Convenendo di considerare positiva una rotazione che avviene nel verso antiorario e negativa quella
che avviene nel verso orario, l’angolo della prima figura viene detto angolo positivo mentre quello
della seconda figura viene detto angolo negativo.
La misura di un angolo orientato si ottiene premettendo alla sua misura assoluta il segno + se
l’angolo è positivo, il segno – se è negativo.
Quanto si è detto per gli angoli vale anche per gli archi.
Richiami di matematica: relazioni tra gli elementi di un triangolo qualunque
Mediante il teorema della corda, la cui definizione è che la misura di una corda di una
circonferenza è uguale al prodotto tra la misura del diametro ed il seno di uno qualunque degli
angoli alla circonferenza che insistono su uno dei due archi sottesi dalla corda, si può dimostrare il
teorema dei seni (o di Eulero), che stabilisce una relazione tra gli elementi di un triangolo.
Questo afferma che in un triangolo qualunque è costante il rapporto tra la misura di un lato ed il
seno dell’angolo opposto; cioè che indicati con A, B, C i tre vertici di un triangolo, α, β, γ i tre
angoli corrispondenti e con a, b, c le misure dei lati rispettivamente opposti agli angoli di vertici A,
B, C (seguiremo d’ora in poi questa convenzione per indicare gli elementi di un triangolo) si ha:
a
senα
Istituto Tecnico Industriale Aldini Valeriani Bologna
b
senβ
c
senγ
Area progetto ruote dentate ellittiche
7
Infatti, se consideriamo la circonferenza circoscritta al triangolo e applichiamo ad ogni lato il
teorema:
a = 2 r senα,
b = 2 r senβ,
c = 2 r senγ
e quindi:
a
senα
2r
b
senβ
2r
c
senγ
2r
Per la proprietà transitiva dell’uguaglianza si ha perciò:
a
senα
b
senβ
c
senγ
Il teorema delle proiezioni ed il teorema del coseno.
Ci proponiamo ora di dimostrare che in un qualunque triangolo la misura di un lato è uguale alla
somma dei prodotti di quelle degli altri due lati per il coseno dell’angolo che ciascuno di questi
forma con il primo; cioè tra gli elementi di un qualsiasi triangolo valgono le relazioni:
a = b cos γ + c cos β
b = a cos γ + c cos α
c = a cos β + b cos α
E’ questo il teorema delle proiezioni. Per dimostrarlo consideriamo le figure seguenti.
α
γ
π−γ
β
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
8
α
γ
β
Nella prima l’altezza AH del triangolo ABC cade internamente al lato BC; si ha pertanto:
a = BH + HC = c cosβ + b cos γ
Nella seconda l’altezza AH cade esternamente al lato BC; in questo caso si ha pertanto:
a = BH – CH = c cosβ – b cos (π – γ) = c cosβ + b cosγ
Per il lato a vale dunque, in ogni caso, il teorema delle proiezioni; in modo analogo si dimostra che
vale anche per ciascuno degli altri lati.
Come immediata conseguenza del teorema delle proiezioni si ha il seguente teorema, detto del
coseno (o di Carnot): in un triangolo qualsiasi,il triangolo della misura di ogni lato è uguale alla
somma dei quadrati delle misure degli altri due, diminuita del doppio prodotto delle misure di
questi per il coseno dell’angolo tra essi compreso; valgono cioè le relazioni:
a2 = b2 + c2 – 2 b c cos α
b2 = a2 + c2 – 2 a c cos β
c2= a2 + b2 – 2 a b cos γ
Lo dimostriamo per un lato, ad esempio per a.
Consideriamo le tre uguaglianze che esprimono il teorema delle proiezioni per ciascuno dei lati e,
seguendo l’ordine nel quale sono state scritte, moltiplichiamo ambo i membri della prima per a,
ambo i membri della seconda per –b, ambo i membri della terza per –c:
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
9
a2 = a b cos γ + a c cos β
-b2 = - a b cos γ – b c cos α
-c2 = - a c cos β – b c cos α
Sommando membro a membro queste tre uguaglianze e riducendo i termini simili, si ottiene:
a2 - b2 - c2 = - 2 b c cos α
da cui si ricava
a2 = b2 + c2 - 2 b c cos α
che è quanto volevamo dimostrare.
Vale la pena di osservare che il teorema di Pitagora può essere considerato un caso particolare del
teorema di Carnot. Infatti, se α = 90° è cos α = 0 e pertanto per il teorema di Carnot si ha:
a2 = b2 + c2
che è appunto la relazione tra ipotenusa e cateti espressa dal teorema di Pitagora.
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
10
Richiami di matematica: l’ellisse
Generalità:
Si dice ellisse il luogo dei punti del piano per i quali è costante la somma delle distanze da due punti
fissi, detti fuochi.
Indichiamo con F1 ed F2 i due fuochi, con 2c (c > 0 ) la loro distanza, con
2a ( a > 0 ) la somma costante delle distanze dei punti dell’ elisse dai fuochi; se P è un generico
punto del luogo dovrà allora essere ( fig.1 ):
| PF1 | + | PF2| = 2a
Figura 1. L’ellisse è il luogo dei punti
P per i quali è:
| PF | + | PF | = 2a,
essendo F1 ed F2 due punti fissi ( denominati
fuochi) ed a una costante.
La condizione affinchè questo luogo esista è che sia:
| PF1 | + | PF2| > | F!F2|
e quindi
2a > 2c ossia a > c.
L’elisse non può avere punti interni al segmento F1F2; per questi punti è infatti 2c la somma delle
distanze dai fuochi. Semplici considerazioni ci portano ad affermare che l’elisse ha due assi di
simmetria : la retta dei fuochi e la retta ad essa perpendicolare nel punto medio del segmento F1F2.
Infatti, se il punto P appartiene al luogo, se cioè vale la relazione | PF1 | + | PF2 | = 2a , analoga
relazione verrà per i punti P’ e P’’ , simmetrici di P rispetto alle due rette ( fig. 2 ).
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
11
Figura 2. La retta F1F2 dei fuochi e la retta a questa perpendicolare nel punto medio
O del segmento F1F2 sono assi di simmetria
per l’elisse. Se P appartiene all’elisse, appartengono alla curva anche P’ e P’’
.
L’elisse è pure simmetrica rispetto al punto O intersezione dei due assi di simmetria (fig. 3). Infatti,
se per un punto P vale la relazione | PF | + | PF | = 2a , la stessa relazione varrà anche per il punto
P, simmetrico di P rispetto ad O. Il punto O viene chiamato centro dell’elisse.
Figura 3. L’elisse gode di una simmetria
centrale rispetto al punto medio O del segmento avente per estremi i fuochi. Se P appartiene all’elisse, appartiene alla curva anche P.
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
12
Equazione dell’ellisse riferita ai suoi assi:
Data un’ellisse di fuochi F1 ed F2 e di centro O, fissiamo un sistema di riferimento cartesiano con
l’asse delle ascisse coincidente con la retta F1F2 e con l’origine nel centro O. Indicando con 2c la
distanza focale si ha:
F1 (− c;0)
F2 ( c;0)
e
Se 2a è la somma costante delle distanze dei punti dell’ellisse dai fuochi, la condizione affinchè un
generico punto P(x;y) appartenga al luogo è che sia:
PF1 + PF2 = 2a
Figura 4: Si vuole trovare l’equazione cartesiana dell’ellisse rispetto ad un sistema di riferimento avente per
assi gli assi di simmetria dell’ellisse stessa.
Calcolando PF1 e PF2 con la formula della distanza tra due punti otteniamo:
PF1 = ( x + c ) + y 2 ;
PF2 = ( x − c ) + y 2 .
La condizione di apparenza di P all’ellisse può allora così venir scritta:
2
(x + c )2 + y 2
+
2
(x − c )2 + y 2
= 2a
Quest’ultima è l’equazione del luogo in esame, ma la forma in cui si presenta è poco pratica, a
causa dei radicali contenuti; cerchiamo pertanto di rendere razionale l’equazione. A tal fine
trasportiamo uno dei radicali nel membro di destra ed eleviamo al quadrato entrambi i membri:
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
13
(x + c )2 + y 2
= 2a −
(x + c ) + y = 2a −
2
2
(x − c )2 + y 2 ;
2
(x − c ) + y .
2
2
Svolgendo le operazioni indicate e sopprimendo i termini uguali nei due membri otteniamo:
x 2 + c 2 + 2cx + y 2 = 4a 2 + x 2 + c 2 − 2cx + y 2 − 4a
2cx = 4a 2 − 2cx − 4a
(x − c )2 + y 2 ;
(x − c )2 + y 2 .
Isoliamo il radicale rimasto, dividiamo i termini dell’equazione per 4 ed eleviamo nuovamente al
quadrato i due membri:
(x − c )2 + y 2 = 4a 2 − 4cx;
2
a (x − c ) + y 2 = a 2 − cx;
2
2
a 2 [( x − c ) + y 2 ] = (a 2 − cx ) ;
4a
a 2 x 2 + a 2 c 2 − 2a 2 cx + a 2 y 2 = a 4 + c 2 x 2 − 2a 2 cx;
(a
2
− c 2 )x 2 + a 2 y 2 = a 2 (a 2 − c 2 ).
Poniamo ora a 2 − c 2 = b 2 (poiché a > c è a 2 − c 2 > 0 ):
b 2 x 2 + a 2 y 2 = a 2b 2
e dividiamo per a 2 b 2 i termini dell’equazione:
x2 y2
+
=1
a 2 b2
Quest’ultima è l’equazione dell’ellisse riferita ai propri assi (cioè ad un sistema di riferimento i cui
assi coincidono con gli assi di simmetria del luogo stesso); essa prende il nome di equazione
canonica o normale.
I punti d’intersezione dell’ellisse con l’asse delle ascisse e con quello delle ordinate si ottengono
risolvendo i sistemi:
x 2 y 2
+
=1
a 2 b2
y = 0
Istituto Tecnico Industriale Aldini Valeriani Bologna
e
x 2 y 2
+
=1
a 2 b2
x = 0
Area progetto ruote dentate ellittiche
14
Essi vengono chiamati i vertici dell’ellisse e sono:
V1 (-a ; 0)
V2 (a ; 0)
V3 (0 ; b)
V4 (0 ; -b)
Mandando per questi punti le rette parallele agli assi cartesiani si ottiene un rettangolo entro il quale
luogo è tutto contenuto.
L’ellisse è tutta contenuta nel rettangolo i cui lati passano per i suoi quattro vertici e sono paralleli
ai suoi assi di simmetria.
Infatti, poiché è:
x2 y2
+
=1
a2 b2
è anche certamente
x2
≤1
a2
e
y2
≤1
b2
Di conseguenza sarà
−a ≤ x≤a
e
−b ≤ y ≤ b
Ciò significa che ogni punto dell’ellisse ha l’ascissa compresa tra − a ed a e l’ordinata compresa tra
–b e b.
I segmenti V1V2 e V3V4, di lunghezze rispettivamente 2 a e 2b, vengono chiamati assi dell’ellisse,
asse maggiore il primo, asse minore il secondo ( a e b sono quindi i semiassi). Il segmento F1F2, di
c
lunghezza 2c, viene chiamato asse focale (c’è pertanto il semiasse focale). Il rapporto
viene
a
generalmente indicato con e e chiamato eccentricità.
Per il numero e vale la relazione
0 ≤ e ≤1
L’ellisse è tanto più schiacciata quanto più il valore di e è vicino ad 1. per e = 0 si ha un cerchio;
c
infatti se = 0 e di conseguenza b 2 = a 2 − c 2 = a 2 ; l’equazione si riduce allora alla forma
a
x2 y2
+
=1
a2 a2
e quindi
Istituto Tecnico Industriale Aldini Valeriani Bologna
x2 + y2 = a2
Area progetto ruote dentate ellittiche
15
Richiami di matematica: definizione di derivata di una funzione di una variabile
I problemi fondamentali ai quali si deve far risalire l’origine del concetto di derivata sono due:
quello della determinazione dell’equazione della tangente ad una curva in un suo punto e quello del
calcolo della velocità di un corpo in moto.
Daremo ora una definizione puramente analitica di derivata di una funzione di una variabile e ne
illustreremo poi il significato geometrico (tangente) e quello cinematico (velocità ed accelerazione).
Sia y = f(x) una funzione definita in un intervallo di estremi a e b e siano un punto interno a detto
intervallo ed
il valore assunto dalla funzione per .
Se alla variabile indipendente x diamo un incremento ∆x (positivo e negativo), se cioè passiamo dal
punto xo al punto xo + ∆x , apparentemente anch’esso all’intervallo di definizione, anche la
variabile dipendente y, cioè la funzione, subirà una variazione; essa passerà infatti dal valore f(xo)
al valore f( xo + ∆x ) .
Chiamiamo incremento della funzione, e lo indichiamo con i simboli y o ∆ f(x), la differenza
f ( x0 + ∆x) − f ( x0 ) (vedi figura); il valore di tale incremento dipende naturalmente dai valori di xo
e di ∆x e può essere positivo, negativo o nullo.
∆f(x)
tra l’incremento subito dalla funzione f(x) e l’incremento dato dalla variabile indipendente x; e
precisamente, rapporto incrementale sinistro quello corrispondente ad un ∆x<0 e rapporto
incrementale destro quello corrispondente ad un ∆x>0.
Il rapporto incrementale della funzione f(x), corrispondente ad un determinato valore
dell’incremento della variabile indipendente, è un indice del “come” varia la funzione nell’intorno
del punto xo ; esso viene anche chiamato la variazione media della funzione corrispondente alla
variazione x subita dalla variabile indipendente.
Una volta fissato xo il valore del rapporto incrementale dipende unicamente dal valore di x, è cioè
una funzione della variabile ∆x. Proponiamoci ora di vedere cosa succede di detto rapporto per
∆x0.
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
16
Se attribuiamo a ∆x valori sempre più piccoli in valore assoluto, se cioè facciamo tendere ∆x a 0
(sia valori negativi che per valori positivi), l’incremento ∆f(x) tenderà anch’esso a 0 e se f(x)
è
∆f ( x)
0
lim
.
continua in xo ; il
si presenterà perciò nella forma indeterminata
∆x →0 ∆x
0
Nulla si può pertanto dire in generale del valore di detto limite; se esso esiste ed è finito viene
chiamato derivata della funzione f(x) in xo
.
Diciamo dunque che:
la derivata della funzione f(x) nel punto xo è il limite, se esiste ed è finito, del rapporto
incrementale
f ( x 0 + ∆x) − f ( x 0 )
∆x
∆f ( x)
=
∆x
al tendere comunque a 0 dell’incremento ∆x della variabile indipendente (con la parola
“comunque” intendiamo dire che ∆x va fatto tendere a 0 sia per valori positivi che negativi).
La derivata si indica in genere con uno dei seguenti simboli:
f ' ( x 0 );
y ' ( x0 );
[Df ( x)]x = x
0
Scriveremo dunque:
f ' ( x0 ) = lim
∆x →0
f ( x0 + ∆x) − f ( x0 )
∆x
Alcune grandezze fisiche definite come derivate di altre
Allo scopo di chiarire meglio il concetto di derivata, riportiamo ora alcuni semplici esempi di
grandezze fisiche definite come derivate di altre grandezze.
A) Velocità istantanea
Sia P un punto che si muove di moto vario su una traiettoria r (che per semplicità supporemo
rettilinea), sulla quale è fissato un sistema di coordinate ascisse di origine 0. La posizione del punto
P è individuata, istante per istante, dalla ascissa s, che risulta funzione del tempo t.
Sia:
s=s(t)
la funzione che esprime la dipendenza di s da t, cioè la così detta legge oraria o equazione del moto.
All’istante t 0 l’ascissa del punto P sarà allora s (t 0 ) ed all’istante t 0 + ∆t sarà s (t 0 + ∆t ) .
Lo spazio percorso da P nell’intervallo di tempo ∆t è dunque:
∆s (t ) = s (t 0 + ∆t ) − s (t 0 )
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
17
∆s (t )
∆t
Mentre il rapporto incrementale
è, per definizione, la velocità media v m
con la quale
P percorre lo spazio ∆s ; è cioè:
vm =
∆s (t ) s (t 0 + ∆t ) − s (t 0 )
=
∆t
∆t
Se il moto non è uniforme, la velocità media
varia al variare di ∆t
vm
, ma, in generale,
∆t sempre più piccoli v m varia sempre meno al variare di ∆t . Il valore a cui
∆s (t )
, al tendere a 0 di ∆t , viene chiamato velocità istantanea di
tende il rapporto incrementale
∆t
P nell’istante t 0 ;
indicando con v(t) la velocità istantanea di P sarà allora:
per valori di
s (t 0 + ∆t ) − s (t 0 )
= s ' (t 0 )
∆t →0
∆t
v(t 0 ) = lim v m = lim
∆t → 0
La velocità di un punto P in un istante
t 0 è dunque la derivata rispetto al tempo dello spazio s(t).
B) Accelerazione istantanea
Ritorniamo ancora all’esempio del punto P che percorre la traiettoria rettilinea r. Se v(t 0 )
v(t 0 + ∆t ) sono le velocità di P rispettivamente negli istanti t 0
velocità
subita
dal
punto
nell’intervallo
di
∆t
tempo
e t 0 + ∆t
è
e
, la variazione di
∆v(t ) = v(t 0 + ∆t ) − v(t 0 )
. Com’è noto, si definisce accelerazione media a m , relativa all’intervallo ∆t , il rapporto tra la
variazione di velocità ∆v e l’intervallo ∆t nel quale la variazione è avvenuta:
am =
∆v(t ) v(t 0 + ∆t ) − v(t 0 )
=
∆t
∆t
Il valore a cui tende detto rapporto quando ∆t → 0 viene chiamato accelerazione istantanea di
P nell’istante t 0
. L’accelerazione a (t 0 ) in un istante t 0
è dunque la derivata, rispetto al
tempo, della velocità v(t):
v(t 0 + ∆t ) − v(t 0 )
= v' (t 0 ) .
∆t →0
∆t
a (t 0 ) = lim a m = lim
∆t → 0
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
18
Studio cinematico di una coppia di ruote dentate ellittiche:
Lo studio cinematico di una coppia di ruote dentate ellittiche a denti dritti è affrontato riferendosi
alle ruote di frizione ellittiche primitive dei suddetti ingranaggi.
Ricerco una relazione che leghi la rotazione della ruota condotta (y – variabile dipendente o di
uscita) all’angolo di rotazione della ruota conduttrice (x – variabile indipendente o di ingresso).
π
ρ
ρ
ρ
ρ
π
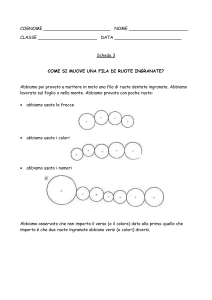
Osservando attentamente la figura si deducono importanti informazioni:
-
Gli ellissi sono infulcrati nei fuochi;
L’interasse tra i due alberi durante il moto rimane naturalmente invariato (F2F1’=cost.);
I triangoli F1PF2 ed F1’PF2’ sono uguali.
L’ultima considerazione è quella più significativa. L’angolo di rotazione della ruota condotta y, per
la similitudine dei triangoli, è quello descritto dai segmenti F1P ed F2P, variabili con la posizione di
P sull’ellisse.
Ma tale angolo appartenente al triangolo descritto sulla ruota condotta lo individuo anche sul
triangolo costruito sull’ellisse motrice, in virtù della similitudine dei triangoli.
Ecco che ci si “libera” di un gran fardello!
Alla luce di quanto detto lo studio del moto di una coppia di ruote di frizione ellittiche si riconduce
all’analisi del moto di un punto su un ellisse.
La rotazione cercata y va espressa in funzione di x.
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
19
I segmenti F1P ed F2P sono, come già detto, variabili a seconda della posizione occupata da P che
dipende, a sua volta, da x.
Il triangolo F1PF2, nel generico istante di moto, è un triangolo qualsiasi e, come tale, va studiato con
il Teorema di Carnot.
Applico il suddetto al fine di ricavare i lati PF1 e PF2 in funzione di x.
(2a − ρ ) 2 = 4c 2 + ρ 2 − 4c ⋅ ρ ⋅ cos(π − x)
4a 2 + ρ 2 − 4a ⋅ ρ = 4c 2 + ρ 2 + 4c ⋅ ρ ⋅ cos x
4a 2 − 4c 2 = 4a ⋅ ρ ⋅ +4c ⋅ ρ ⋅ cos x
ρ = ρ ( x) =
a2 − c2
a + c ⋅ cos x
Il legame incognito fra gli angoli y ed x è fornito dal Teorema dei seni applicato al triangolo F1PF2
che, ricordiamo, è generico.
E’ una fase delicata, si sceglie di affidarsi al lato 2c in quanto è l’unico del triangolo a restare
immutato poiché rappresenta la distanza tra i due fuochi.
Applico il teorema dei seni
)
angolo F1 PF2 = π − ( y + π − x) = π − y − π + x = x − y
2c
2a − ρ
=
sen( x − y ) sen(π − x)
2c ⋅ sen(π − x)
2c ⋅ sen(π − x)
sen( x − y ) =
=
2a − ρ
a2 − c2
2a −
a + c ⋅ cos x
con sen(π − x ) = senx
2c ⋅ senx
y = x − arcsen
a2 − c2
2a −
a + c ⋅ cos x
con x e y espressi in radianti
π
2
2c ⋅ sen
⋅ x
360 2π
360
y=
⋅
⋅ x − arcsen
2π 360
a2 − c2
2a −
2π ⋅ x
a + c ⋅ cos
360
con x e y espressi in gradi
Con gli angoli scelti in figura si è verificato che i risultati coincidono con quelli del catalogo della
ditta Nanni Ingranaggi ma le rotazioni presentano sfasamenti di 180°: ciò è imputabile alla
differente scelta delle posizioni di partenza della coppia di ruote.
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
20
Si corregge immediatamente la discordanza tenedo conto dello sfasamento di 180° nelle rotazioni,
ciò evita di ridisegnare completamente la figura precedente:
2π
2c ⋅ sen
⋅ (180 − x )
360
360 2π
y=
⋅
⋅ x − arcsen
2
2
a −c
2π 360
2a −
2π ⋅ (180 − x )
a + c ⋅ cos
360
La legge della velocità angolare viene ricavata semplicemente derivando rispetto al tempo
l’espressione appena determinata. Occorre osservare che l’angolo y dipende da x il quale, a sua
volta, è funzione del tempo ( x = wt). Pertanto sono in presenza di una relazione del tipo: y =
y(x(t)).
Andando a derivare otterò:
dy dy dx
=
dt dx dt
con
w=
dx
dt
poiché la velocità angolare è la derivata dell’angolo spazzato rispeto al tempo.
Per determinare l’espressione dell’accelerazione derivo la velocità angolare della ruota condota
rispetto al tempo, ragionando analogamente. Le funzioni suddette verranno riportate più avanti.
Tale fase di calcolo può essere demandata tranquillamente all’elaboratore.
I grafici della relazione sono stati realizzati con la calcolatrice grafica in dotazione nel sistema
operativo del Macintosh (Graphing Calculator 1.1) ma è possibile utilizzare per l’ambiente
Windows il programma Derive 5 della Software House.
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
21
Legge rotazioni (spostamenti angolari) della ruota condotta in funzione dei gradi di rotazione
della ruota conduttrice:
π
2c sin 2
( π − x)
360 π
360
y =
2
x
−
asin
2π 360
a2 − c 2
2a −
2 π ( π − x )
a
+
c
cos
360
Legenda:
y = angolo di rotazione in gradi della ruota condotta (variabile di uscita);
x = angolo di rotazione in gradi della ruota conduttrice (variabile di ingresso);
a = semiasse maggiore dell’ellisse;
b = semiasse minore dell’ellisse;
c = metà della distanza focale.
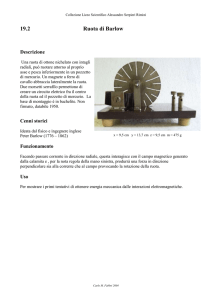
Grafico rotazioni in gradi della ruota condotta in funzione della rotazione della conduttrice:
(esempio: ruota ellittica con semiasse maggiore a = 65 mm; semiasse minore b = 61,283 mm; metà
distanza focale c= 21,6665 mm – coppia di ruote ditta Nanni Ingranaggi codice 2501300200)
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
22
Ingrandendo maggiormente il piano cartesiano:
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
23
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
24
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
25
Legge della velocità angolare della ruota condotta in funzione dei gradi di rotazione della
ruota conduttrice:
y = w
2
2
π ( − x + 180)
a −c
πc 2a −
cos
π ( − x + 180 )
180
π ( − x + 180 )
2
2 2
a − c cos
π ( a − c ) c sin2
180
180
−
+
90
π ( − x + 180) 2
90 a − c cos
180
π
180
−
180
π ( − x + 180)
2
2
4c sin2
2
2
180
a −c
+1
2a −
−
2
π
(
−
x
+
180
)
a − c cos
a 2 − c2
180
2a −
π
(
−
x
+
180
)
−
cos
a
c
180
π
Legenda:
y’ = velocità angolare della ruota condotta (variabile di uscita);
x = angolo di rotazione in gradi della ruota conduttrice (variabile di ingresso);
a = semiasse maggiore dell’ellisse;
b = semiasse minore dell’ellisse;
c = metà della distanza focale;
w = velocità angolare dell’albero conduttore.
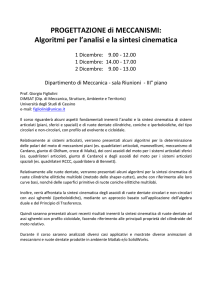
Diagramma dell’andamento della velocità angolare della ruota condotta in funzione degli
angoli di rotazione della ruota conduttrice:
(esempio: ruota ellittica con semiasse maggiore a = 65 mm; semiasse minore b = 61,283 mm; metà distanza focale c=
21,6665 mm; w = 100 rad/s – coppia di ruote ditta Nanni Ingranaggi codice 2501300200)
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
26
Con una scala più accentuata:
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
27
Legge della accelerazione angolare della ruota condotta in funzione dei gradi di rotazione
della ruota conduttrice:
π ( − x + 180)
a2 − c2
π 2a −
sin
π (− x + 180 )
180
π ( − x + 180)
π (− x + 180 )
2
2
a − c cos
πc (a − c ) sin
⋅ cos
180
180
180
πc
−
180
π ( − x + 180) 2
180 a − c cos
180
2
2
2
2 π ( − x + 180)
− ( a2 − c2) sin π ( − x + 180) ⋅ cos π ( − x + 180) ⋅ π2 c2 a − c cos π ( − x + 180 ) + π2 a − c cos π ( − x + 180 ) ( a2 − c2 ) c3 sin 3 π ( − x + 180)
4c sin
180
180
180
180
180
a2 − c2
180
2a −
180 −
+
+ 1−
−
2
π (− x + 180 )
90
π ( − x + 180) 4
a − c cos
2
2
8100 a − c cos
a −c
180
180
2a −
π ( − x + 180)
a − c cos
180
y = w2 −
a2 − c2
π ( − x + 180)
πc 2a −
cos
π ( − x + 180)
180
2
2 2
2 π ( − x + 180)
a − c cos
π ( a − c ) c sin
180
180
−
+
90
π ( − x + 180) 2
90 a − c cos
180
−
2
2
2
2
2
π ( − x + 180)
π ( − x + 180) 2
a −c
a −c
2
2 3
3 π ( − x + 180)
⋅ cos
⋅ c 2a −
2π 2a −
2π sin
( a − c ) c sin
180
180
π ( − x + 180)
π ( − x + 180)
180
a − c cos
a − c cos
180
180
−
+
45
π ( − x + 180) 2
45 a − c cos
180
2
− 1/2
π ( − x + 180)
−2
4c 2 sin 2
a2 − c2
180
−
2a −
+ 1
2
π ( − x + 180)
a − c cos
a 2 − c2
180
2a −
π ( − x + 180)
a − c cos
180
a 2 − c2
( a2 − c2 ) sin π ( − x + 180 ) ⋅
πc 2a −
π ( − x + 180)
180
a − c cos
180
−
90 a − c cos
π ( − x + 180)
2
4
4c sin 2
180
a2 − c2
+ 1 π 2 a −
−
2
π (− x + 180)
2
2
a − c cos
a −c
180
2a −
π ( − x + 180)
a − c cos
180
4c 2 sin 2
−
π ( − x + 180) 2
180
π (− x + 180)
180
a2 − c 2
2a −
π (− x + 180)
a − c cos
180
2
+ 1
Legenda:
Y.. = accelerazione angolare della ruota condotta (variabile di uscita);
X = angolo di rotazione in gradi della ruota conduttrice (variabile di ingresso);
a = semiasse maggiore dell’ellisse;
b = semiasse minore dell’ellisse;
c = metà della distanza focale;
w = velocità angolare dell’albero conduttore.
Diagramma dell’andamento della accelerazione angolare della ruota condotta in funzione
degli angoli di rotazione della ruota conduttrice:
(esempio: ruota ellittica con semiasse maggiore a = 65 mm; semiasse minore b = 61,283 mm; metà distanza focale c=
21,6665 mm; w = 100 rad/s – coppia di ruote ditta Nanni Ingranaggi codice 2501300200)
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
28
Con una scala più accentuata:
Premessa: tutti i grafici seguenti sono stati costruiti riferendosi sempre alla coppia di ruote ellittiche prodotte dalla
ditta Nanni Ingranaggi, codice 2501300200 aventi:
semiasse maggiore a = 65 mm;
semiasse minore b = 61,283 mm;
metà distanza focale c= 21,6665 mm;
interasse = 130 mm.
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
29
Commento dei grafici:
- legge delle rotazioni
In verde: rotazione in gradi della ruota condotta a denti dritti ellittica in funzione della rotazione della ruota
conduttrice;
In rosa: rotazione in gradi della ruota condotta a denti dritti circolare in funzione della rotazione della ruota
conduttrice.
Se esamino le rotazioni di una coppia di ruote dentate a denti dritti circolari aventi ugual numero di
denti e stesso diametro primitivo, il grafico y – x sarebbe una retta inclinata di 45° passante per
l’origine (bisettrice del I e III quadrante).
Nei punti in cui la legge delle rotazioni (verde) interseca la retta (rosa) le ruote ellittiche sono nelle
posizioni di “quadratura”, cioè hanno i semiassi maggiori allineati sulla medesima retta.
fig.1
y = 0°, x = 0°.
fig.2
y = 180°, x = 180°.
E’ opportuno osservare che la forma della legge delle rotazioni è la seguente:
y = f(x) – arcsen(f(x))
Essendo arcsen(f(x)) una quantità oscillante si capisce perché il grafico abbia il suddetto
andamento. Ad un giro della ruota morice corrisponde un giro della ruota condotta. Il rapporto di
trasmissione, variabile istante per istante, è nel periodo unitario.
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
30
legge della velocità angolare della ruota condotta:
La linea orizzontale di colore fucsia rappresenta la velocità angolare dell’albero della ruota motrice,
che è costante nel tempo e pari nell’esempio di figura a w = 100 rad/s.
La linea in verde rappresenta la velocità angolare dell’albero su cui è calettata la ruota condotta,
variabile nell’arco di un giro.
Per gli intervalli di x nei quali la linea verde giace al di sotto della linea rosa, la ruota condotta ruota
più lentamente della ruota motrice.
Viceversa per gli intervalli di x nei quali la linea verde giace al di sopra della linea rosa, la ruota
condotta ruota più velocemente della ruota motrice.
D’altronde la funzione degli ingranaggi ellittici è proprio questa, cioè ottenere una velocità angolare
variabile nell’arco dello stesso giro, mantenendo un rapporto di trasmissione medio pari ad 1:1.
La velocità angolare della ruota ellittica condotta varia da 50 rad/s a 200 rad/s, venendo cioè
nell’arco di un giro fatta variare tra w/2 e 2w. L’entità della suddetta variazione dipende dalla
geometria dell’ingranaggio.
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
31
- legge della accelerazione angolare della ruota condotta:
Dove la velocità angolare della ruota condotta presenta valore minimo (x = 0° e 360°)
l’accelerazione è nulla. Ciò è confermato e giustificato dal fatto che l’accelerazione angolare
scaturisce dalla derivata prima rispetto al tempo della velocità angolare della ruota condotta.
Quest’ultima gira perciò con velocità angolare pressoché costante esclusivamente negli intorni dei
punti x = 0° e x = 360°.
Notare che nell’intervallo 0° - 180° l’accelerazione è positiva, pur se incostante. Infatti la velocità
sta aumentando: la ruota conduttrice sta accelerando la ruota ellittica condotta.
Notare infine che nell’intervallo 180°-360° l’accelerazione è negativa, pur se incostante. Infatti la
velocità sta diminuendo: la ruota conduttrice sta rallentando la ruota ellittica condotta.
Lo studio cinematico di una coppia di ruote ellittiche ha portato a relazioni la cui validità è
confermata sia dai dati del catalogo della ditta Nanni Ingranaggi sia dalla simulazione eseguita con
il programma Autocad 2000.
Un ulteriore conferma si ha dal raffronto tra i “ nostri" grafici con il prospetto che Nanni fornisce ai
suoi Clienti.
Se ci è permesso vorremmo umilmente sottolineare una incongruenza nei suddetti diagrammi:
l’accelerazione ha segno meno quando la velocità angolare dell’albero condotto è crescente... e
viceversa…
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
32
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
33
Caratteristiche costruttive:
I denti di una ruota dentate ellittica non sono tutti uguali, come mostrano chiaramente le figure
seguenti: ciò è dovuto al fatto che, durante la dentatura (eseguita con una dentatrice tipo Pfauter a
CNC) il creatore non ingrana con la circonferenza primitiva bensì con un ellisse primitivo. In tal
modo varia il raggio di curvatura della superficie su cui rotola il segmento che descrive il profilo ad
evolvente del fianco del dente. Il passo tuttavia deve restare nvariato lungo l’ellisse primitivo,
condizione necessaria per l’ingranamento.
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
34
E’ fondamentale per il funzionamento dell’ingranaggio posizionare i denti come in figura (notare la
presenza dei riferimenti rappresentati dai bulini) :
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
35
Criteri di scelta delle ruote ellitiche:
Qualitativamente si cerca di dare una traccia per il progettista da seguire per scegliere la coppia di
ruote ellittiche opportune.
Lo scopo è ottenere un certo “rapporto tra le velocità angolari” massime e minime che si verificano
nell’arco di una rotazione completa, situazioni, come già visto, che si hanno nelle posizioni di
quadratura.
R2
R2
R1
R1
w2
w1=cost
w2
w1=cost
Ruota condotta
x=0°
Ruota motrice
Ruota condotta
x=180°
Ruota motrice
Poiché si sono sempre prese come esempio le ruote ellittiche con
semiasse maggiore a = 65 mm;
semiasse minore b = 61,283 mm;
metà distanza focale c= 21,6665 mm
della ditta Nanni Ingranaggi (codice 2501300200), si continua con esse:
wmax 200rad / s
=
=4
wmin
50rad / s
Come arrivo a tele risultato senza passare attraverso l’uso della legge con il rispettivo grafico?
Analizziamo le situazioni delle ruote ellittiche in quadratura:
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
36
R1 = a − c = 65 − 21,6665 = 43,3335mm
R2 = a + c = 65 + 21,6665 = 86,6665mm
wmin = w cos t
R1 43,3335mm
=
= 1/2
R2 86,6665mm
wmax = w cost
R2 86,6665mm
=
=2
R1 43,3335mm
perciò:
rv =
w max
wmin
R2
R1
R
=
= ( 2 )2
R1
R1
wcos t
R2
w cos t
quindi
rv =
w max
R
= ( 1 )2 = (rr )2 = 2 2 = 4
wmin
R2
Giocando sulle forme delle ruote ellittiche ricavo il rapporto tra le velocità desiderato. Il catalogo
evita i calcoli poiché fornisce già tali valori.
Istituto Tecnico Industriale Aldini Valeriani Bologna
Area progetto ruote dentate ellittiche
37