Note
v e r s i o n e
p r e l i m i n a r e
(23 - 5 - 2017)
di
Topologia Algebrica
Giambattista Marini
Queste note sono una sintesi dei risultati principali che si incontrano studiando i fondamenti
di topologia algebrica, costituiscono una, spero utile, “overview” sulla materia per lo studente
che segue attivamente il corso.
Indice
0.
1.
Richiami
3
•
5
CW-complessi
•
•
•
2.
3.
Connessione e connessione per archi
Incollamenti
CW-complessi
Classificazione delle superfici compatte
6
6
8
13
Omotopia
18
•
•
•
•
19
22
26
30
Deformazioni e Retratti
Gruppo Fondamentale
Il Teorema di Seifert e Van Kampen
Rivestimenti
Omologia
40
•
•
•
•
•
•
•
•
•
43
44
49
50
52
54
57
62
67
Simplessi singolari: notazione fondamentale
Sui simplessi singolari e loro suddivisioni
Successione di Mayer-Vietoris
Invarianza Omotopica
Il Teorema di Hurewicz
Omologia della coppia
Omologia della sfera
Omologia dei ∆-complessi e Omologia Simpliciale
Omologia cellulare
2
•
•
Omologia con coefficienti
Formula di Künneth
73
74
4.
Coomologia
75
5.
Varietà Topologiche
79
•
•
•
79
81
84
A1.
Orientazione
Classe Fondamentale
Dualità di Poincaré
Gruppi liberi e prodotto libero di gruppi
•
A2.
Gruppi abeliani liberi
Algebra Omologica
•
•
•
•
•
Il prodotto tensoriale ed il funtore “Tor”
Il teorema dei coefficienti universali
La formula di Künneth in algebra omologica
Funtore Hom e coefficienti universali in coomologia
Cenni sulle categorie abeliane
Bibliografia
87
89
91
97
101
103
104
107
108
Per gli studenti del corso di Topologia algebrica (a.a. 2016-17),
ho scritto queste note semplicemente con l’idea di riassumere i concetti fondamentali che si
incontrano in topologia algebrica. In particolare, con una finalità diversa da quella di scrivere
il libro di testo di questo corso. Ciò ha delle implicazioni che voglio sottolineare:
1. queste note non coprono tutto ciò che verrà discusso a lezione, né vale il viceversa (il
programma del corso sarà quello svolto a lezione);
2. nel dare le dimostrazioni ho cercato la sintesi e, nel caso di quelle più lunghe e noiose,
mi sono limitato a darne le linee guida. In buona parte, l’idea di fondo è che tutto ciò che è
“straightforward” venga lasciato al lettore (che si presume segua attivamente il corso). Vari
dettagli tecnici vengono lasciati per esercizio e alcuni argomenti vengono trattati in maniera
diretta, senza una adeguata introduzione ed i dovuti esempi. Tutto ciò rende queste note
di difficile lettura, almeno all’inizio, ...lo studente del terzo anno al primo contatto con la
Topologia Algebrica non si spaventi!
Il materiale coperto dal corso si trova in [Hat], libro che può essere usato come testo di
riferimento (è disponibile online sul sito dell’autore). Nella bibliografia indico altri testi che,
almeno per quanto riguarda la gran parte degli argomenti, sono validissimi testi di riferimento
(e, almeno per certi versi, a volte preferibili a quello che ho indicato).
Prerequisiti: Argomenti trattati nel primo anno del Corso di Laurea in Matematica, rudimenti
di topologia generale (coperti nel corso di geometria 3).
3
§ 0.
Richiami.
Notazioni e convenzioni.
(1.1) Con il termine funzione si intende funzione continua (in ambito topologico e salvo diversamente specificato);
(1.2) un omeomorfismo è una funzione continua, invertibile con inversa continua;
(1.3) un sottospazio di uno spazio topologico è un sottoinsieme (arbitrario) dotato della topologia indotta.
◦
(1.4) Sia A un sottospazio di uno spazio topologico X . I simboli A e A denotano rispettivamente la chiusura
e l’interiore di A (come sottospazi di X naturalmente);
(1.5) I denota l’intervallo reale [0, 1] con la topologia naturale;
(1.6) Dn ed S n denotano rispettivamente il disco di dimensione n e la sfera di dimensione n:
Dn = { x ∈ Rn | ||x|| ≤ 1 } ,
S n = { x ∈ Rn+1 | ||x|| = 1 }
dotati della topologia naturale indotta dai rispettivi ambienti Rn e Rn+1 . Sottolineiamo che la sfera
S n è un sottospazio del disco Dn+1 (ne è la frontiera).
(1.7) Il prodotto cartesiano di spazi topologici, due o più, si intende dotato della topologia prodotto
(cfr. esempio 4.1).
S
(1.8) Il simbolo “ • ” denota l’unione disgiunta.
Definizione 1.9. Uno spazio topologico si dice T1 se i punti sono chiusi, si dice T2 (= di Hausdorff ) se
separa i punti (i.e. punti distinti ammettono intorni disgiunti), si dice T4 se1 è T1 e separa i chiusi (i.e. per ogni
coppia chiusi disgiunti C1 e C2 è possibile trovare due aperti disgiunti U1 e U2 tali che C1 ⊆ U1 , C2 ⊆ U2 ).
Def. 2. Sia X uno spazio topologico, ∼ una relazione d’equivalenza su X , π : X −→ X/ ∼
la proiezione naturale. Lo spazio topologico quoziente, denotato con X/ ∼, è l’insieme
quoziente dotato della topologia definita dalla proprietà che segue:
U
⊆ X/ ∼
è aperto
⇐⇒
π −1 (U) è aperto in X
Esercizio 2.1. Si verifichi che quella introdotta è effettivamente una topologia su X/ ∼ .
Esercizio 2.2. Si verifichi che X/ ∼ è dotato della topologia più fine per la quale la proiezione π è continua
(i.e. della topologia coindotta dalla proiezione, cfr. Def. 3.1).
Notazione 2.3. Sia A un sottospazio di uno spazio topologico X . Poniamo
X/A
:=
X/ ∼
essendo ∼ la relazione d’equivalenza che identifica i punti di A (p ∼ q ⇐⇒ p = q oppure p, q ∈ A).
Avvertenza 2.4. Secondo quanto visto finora, il quoziente R/Z può essere interpretato in due modi, in
ognuno dei due casi dotato della topologia quoziente (def. 2):
• come “quoziente di gruppi”, i.e. come R/ ∼ dove a ∼ b ⇔ a−b ∈ Z;
• come “quoziente insiemistico”, i.e. come R/ ∼ dove a ∼ b ⇔ a = b oppure a, b ∈ Z (notazione 2.3).
Nel primo caso si ottiene un cerchio, i.e. uno spazio omeomorfo ad S 1 , nel secondo caso si ottiene un bouquet
di un’infinità numerabile di cerchi. Per esercizio, ci si convinca di quanto affermato.
Salvo diversamente
specificato, R/Z va interpretato nel primo dei due modi (quindi R/Z ∼
= S 1 ). Più in
generale, Rn Zn denota il quoziente di gruppi (in questo caso si ottiene il cosiddetto Toro di dimensione n).
Esercizio 2.5. Sia A un sottospazio di uno spazio topologico X . Provare che
• gli aperti di X/A sono le immagini, tramite la proiezione naturale π : X −→ X/A, degli aperti di X che
non incontrano oppure contengono A;
• se B è un sottoinsieme di X , si ha che:
( B ∩ A 6= ∅ e B ∪ A è aperto)
π(B) ⊆ X/A è aperto
⇐⇒
oppure
( B ∩ A = ∅ e B è aperto)
• se X è T4 ed A è chiuso, allora anche X/A è T4 (cfr. def. 1.9).
1
Qualche autore, nella definizione di spazio T4 non include la richiesta che sia T1, ...noi ce la mettiamo.
4
A partire dallo spazio prodotto (1.7) e dagli spazi quoziente (2) e (2.3) si introducono altri spazi notevoli.
Definizione 2.6. Siano X ed Y spazi topologici, x0 ∈ X , y0 ∈ Y punti. Si definiscono i seguenti spazi:
Cono :
X ×I X ×{0} ;
“Suspension”:
X ×I ∼ , dove (x, 0) ∼ (x′ , 0) e (x, 1) ∼ (x′ , 1)
si contraggono X ×{0} a un punto e X ×{1} a un altro punto ;
“Join”:
X ×Y × I ∼ , dove (x, y, 0) ∼ (x, y ′ , 0) e (x, y, 1) ∼ (x′ , y, 1)
in X ×Y ×{0} si contraggono le fibre della proiezione su X e
in X ×Y ×{1} si contraggono le fibre della proiezione su Y ;
Y {x0 , y0 } ;
“Smash product”: X ×Y X ×{y0 } ∪ {x0 }×Y .
“Wedge sum”:
X
S•
In assenza di una traduzione usata diffusamente nella letteratura italiana abbiamo mantenuto il termine inglese.
Esercizio 2.7. Siano X ⊆ Rn , Y ⊆ Rm , x0 ∈ X, y0 ∈ Y . Si descriva la loro Wedge sum come sottospazio
di Rn+m . Assumendo che X ed Y siano chiusi e limitati, si descrivano gli spazi Cono, Suspension e Join
scritti nella (2.6), rispettivamente come sottospazi di Rn+1 , Rn+1 , Rn+m+1 .
Com’è fatto il cono sull’intervallo aperto (0 , 1)? È possibile immergerlo in un qualche Rn ?
Nell’inciso che segue, tra le altre cose che diciamo, rispondiamo alle domande sul cono.
Inciso 2.8. Dato X ⊆ Rn , oltre al cono astratto definito sopra, che denoteremo con Ca (X), si può
considerare il cosiddetto cono geometrico Cgeom (X) definito “unendo i punti di X ad un punto esterno”: si
considerano un’immersione iperpiana ξ : Rn ֒→ Rn+1 ed un punto v 6∈ ξ(Rn ), quindi si definisce Cgeom (X)
come l’unione dei segmenti x v, x ∈ ξ(X). C’è una funzione ben-definita, continua e biunivoca
ω : Ca (X) −−→ Cgeom (X)
⊆ Rn+1
[(x, t)]
7→ t v + (1−t) x̃
n+1
dove x̃ := ξ(x) ∈ R
denota il punto corrispondente ad x. Inoltre, “fuori dal vertice” questa è un
omeomorfismo, mentre nel vertice le cose possono andare male, vale il seguente risultato:
(♣)
ω −1 è continua nel vertice v se e solo se X è compatto.
Infatti, gli intorni aperti del vertice del cono astratto corrispondono via π −1 agli
X× I
aperti U ⊆ X×I contenenti X×{0} (contratto da π), mentre gli intorni aperti
πy
del vertice del cono geometrico corrispondono via (ω ◦ π)−1 ad aperti U ′ ⊆ X× I
che contengono necessariamente X×[0, ǫ) per un qualche ǫ > 0 (per esercizio).
ω
Ca (X) −−→ Cgeom (X)
I primi coincidono con i secondi se e solo se X è compatto (per esercizio).
Inoltre, se X non è compatto, per l’esercizio che segue gli aperti U descritti sopra sono troppi: il vertice del
cono astratto Ca (X) non ammette una base numerabile di intorni. Di conseguenza Ca (X) non è metrizabile,
a maggior ragione non può essere immerso in alcun Rm .
n
Esercizio 2.9. Provare
numerabile
che se X ⊆ R non è compatto, nel prodotto X×I non esiste una famiglia
di aperti F := Ui i∈N tale che: i) X ×{0} ⊆ Ui , ∀ i ; ii) ∀ aperto U ⊇ X ×{0} , ∃ i Ui ⊆ U .
◦
∼
◦
Concludiamo questa sezione con una lista avulsa di risultati e nozioni di topologia.
Definizione 3.1. Sia X un insieme, {Wα }α ∈ S una famiglia di spazi topologici,
F =
fα : Wα → X α ∈ S
una famiglia di applicazioni. Su X , si definisce topologia coindotta dalla famiglia F la topologia più fine per
la quale ogni fα è continua (questa viene detta anche finale o forte, per la famiglia F ).
Esercizio 3.2. Nelle ipotesi della definizione (3.1), provare quanto segue
U ⊆ X è aperto se e solo se fα−1 (U ) è aperto, per ogni α.
Definizione 4. Sia X un insieme, {Wα }α ∈ S una famiglia di spazi topologici,
F =
fα : X −→ Wα α ∈ S
una famiglia di applicazioni. Su X , si definisce topologia indotta dalla famiglia F la topologia meno fine per
la quale ogni fα è continua (questa viene detta anche iniziale o debole , per la famiglia F ).
5
Esempio 4.1. Il prodotto di spazi topologici viene dotato della topologia indotta dalle proiezioni (= debole).
Nel caso di prodotti finiti, la topologia debole coincide con quella generata dai prodotti di aperti (generalmente
è meno fine).
Lemma 5 (di Lebesgue). Si consideri I n ⊆ Rn e sia {Uα } un ricoprimento aperto di I n . Allora, è
possibile suddividere I n in plurintervalli chiusi in numero finito in modo che ogni plurintervallo sia interamente
contenuto in almeno un aperto del ricoprimento. In effetti vale un risultato più forte:
(5.1)
∃ ǫ > 0 | ∀ x ∈ I n , Bx, ǫ ⊆ Uα (per un qualche α), essendo Bx, ǫ la sfera di centro x e raggio ǫ.
Un tale ǫ si chiama numero di Lebesgue del ricoprimento.
Definizione 6. Una applicazione2 tra spazi topologici f : X −→ Y
l’immagine inversa di ogni intorno di f (x) è un intorno di x .
si dice continua nel punto x se
Esercizio 6.1. Si abbia f : X −→ Y (non necessariamente continua). Verificare che
• f è continua in x ⇐⇒ l’immagine inversa di ogni intorno aperto di f (x) è un intorno di x ;
• f è continua ⇐⇒ è continua in ogni punto.
Lemma 7 (di incollamento). Siano X, Y spazi topologici,
n
S
Ci un ricoprimento finito chiuso.
X = ∪ Uα un ricoprimento aperto, X =
i=1
(7.1) Se { fα : Uα → Y } è una collezione di funzioni continue che si raccordano bene, allora
∃ ! funzione continua f : X −→ Y
tale che
f | Uα = fα ,
∀α.
(7.2) Se { gi : Ci → Y } è una collezione di funzioni continue che si raccordano bene, allora
∃ ! funzione continua g : X −→ Y
tale che
g| Ci = gi ,
∀i.
Un ricoprimento aperto è un ricoprimento in insiemi aperti. Un ricoprimento chiuso è un ricoprimento in
insiemi chiusi. L’aggettivo finito indica che gli insiemi del ricoprimento in questione sono in numero finito.
Date delle funzioni, diciamo che queste si raccordano bene se a due a due coincidono nelle rispettive
intersezioni
nei due casi del lemma abbiamo fα |Uα ∩Uβ = fβ |Uα ∩Uβ , ∀ α, β e gi |U ∩Uj = gj |U ∩Uj , ∀ i, j .
i
i
Connessione e connessione per archi.
Ricordiamo che uno spazio topologico X si dice connesso se non è unione disgiunta di due aperti, equivalentemente se non possiede sottoinsiemi sia aperti che chiusi; si dice connesso per archi, scriveremo c.a., se per
ogni coppia di punti esiste un cammino, i.e. una “funzione continua definita sull’intervallo I, a valori in X ”,
che li congiunge. La connessione per archi implica la connessione.
Fissato X , l’unione di due (o più) sottospazi connessi aventi intersezione non vuota è anch’essa connessa.
Di conseguenza, le componenti connesse, definite come sottospazi connessi massimali, costituiscono una partizione dello spazio X . Gli stessi identici risultati valgono anche per la connesione per archi.
Definizione 8.1. Uno spazio topologico X si dice:
• localmente connesso, scriveremo l.c. (ovvero localmente connesso per archi, scriveremo l.c.a.), se esiste
una base per la topologia costituita da aperti connessi (ovvero connessi per archi);
• c.a. nel punto x (ovvero l.c.a. in x) se x ammette una base di intorni connessi (ovvero connessi per
archi).
Esercizio 8.2. Si verifichi che X è l.c.a. ⇐⇒
è l.c.a. in x per ogni x ∈ X .
Esercizio 8.3. Si verifichi che se X è l.c.a., allora
• X è connesso se e solo se è connesso per archi;
• le componenti connesse di X coincidono con le componenti connesse per archi e sono sia aperte che chiuse.
Suggerimento: Le componenti connesse di X sono sempre (anche per X arbitrario) chiuse, questo perché la
chiusura di un connesso è connessa.
2
Col termine “applicazione” intendiamo “funzione arbitraria”, cioè non necessariamente continua.
6
§ 1.
CW-complessi.
Incollamenti.
Def. 1. Si abbiano X , A, Y come nel diagramma a lato, con A sottospazio
chiuso di Y . Lo spazio ottenuto da X attaccandovi Y tramite φ è lo spazio
`
S•
X
Y
:=
X
Y
∼
φ
A ֒→ Y
φ
y
X
essendo ∼ la relazione d’equivalenza generata dalle identificazioni del tipo a ∼ φ(a), a ∈ A,
dotato della topologia quoziente (cfr. Def. §0, 2).
Componendo le inclusioni di X ed Y in X ∪• Y con la proiezione su X
due funzioni continue,
`
`
i : X ֒→ X φ Y
e
Φ : Y → X φY
`
φY
si ottengono
chiamate rispettivamente inclusione e funzione caratteristica dell’incollamento
Nota 1.1. L’inclusione i è iniettiva e la funzione caratteristica Φ estende la composizione i ◦ φ.
Esercizio 1.2. Siano X , A, Y come nella definizione (1), le funzioni i e Φ come sopra. Verificare che
`
i) un sottoinsieme U ⊆ X φ Y è aperto se e solo se gli insiemi i−1 (U ) e Φ−1 (U ) sono entrambi aperti
`
(la topologia su X φ Y è la più fine per la quale le applicazioni i e Φ sono entrambe continue);
`
ii) tramite i, lo spazio X è un sottospazio chiuso di X φ Y (sottospazio nel senso §0, 1.3);
`
iii) l’immagine Φ(Y r A) è aperta in X φ Y (è il complementare di i(X)) e la restrizione Φ|Y rA è un
omeomorfismo sull’immagine (essendo A chiuso per ipotesi, il sottospazio Y r A è aperto).
`
Osservazione 2. Ogni elemento in X φ Y ha un unico rappresentante in X ∪• (Y rA), di conseguenza,
a livello insiemistico , c’è una identificazione naturale
`
(♣)
X ∪• (Y rA) = X φ Y .
Inoltre, l’inclusione e la funzione caratteristica dell’incollamento possono essere descritte esclusivamente in
termini dell’insieme a sinistra: i : X ֒→ X ∪• (Y r A) è l’inclusione naturale e Φ : Y → X ∪• (Y r A) è
l’applicazione che estende φ nella maniera ovvia: Φ è definita ponendo Φ|A := φ e Φ|Y rA := “inclusione
in X ∪• (Y r A)”. Queste considerazioni forniscono una maniera alternativa di introdurre l’incollamento:
Esercizio 2.1. Siano X, A, Y, φ come nella definizione (1), sia inoltre
X ∗ := X ∪• (Y rA) con la topologia coindotta (def. §0, 3.1) dalla famiglia { i : X → X ∗ , Φ : Y → X ∗ }
(dove i e Φ sono da intendersi nel senso dell’osservazione 2). Provare che l’identificazione insiemistica (♣) è
un omeomorfismo:
`
X∗ ∼
= X
φ Y
Esercizio 3. Siano X, A, Y, φ e Φ come nella definizione (1). Provare che
`
• se X ed Y sono T1, le fibre della funzione caratteristica Φ : Y −→ X φ Y sono dei chiusi;
`
• se φ è suriettiva e chiusa, allora X φ Y è un quoziente Y / ∼ di Y
inoltre, la funzione Φ si identifica con la proiezione Y −→ Y / ∼ .
Proposizione 3.1. Sia X uno spazio topologico, si consideri
`
Y = Dn , A = S n−1 , φ : A −→ X
X ∗ := X φ Y ,
(lo spazio ottenuto incollando ad X un disco Dn lungo la frontiera S n−1 ). Allora
a) se X è di Hausdorff, anche X ∗ è di Hausdorff;
b) se X è T4, anche X ∗ è T4 (cfr. def. §0, 1.9).
7
Inoltre, vale un risultato leggermente più forte (generalizza sia a che b e, di fatto, ci dice che gli aperti che
separano ciò che devono separare possono essere scelti in modo da intersecare3 X “in modo conveniente”):
se C1 , C2 ⊆ X ∗ sono chiusi disgiunti, V1 e V2 aperti in X che separano4 C1 ∩X e C2 ∩X , allora
c)
∃ U1 e U2 (aperti in X ∗ ) che separano C1 e C2 , soddisfacenti U1 ∩X = V1 e U2 ∩X = V2 .
Nota. Sottolineiamo che in c non ci sono ipotesi su X , ma V1 e V2 fanno parte dei dati (e sono fissati).
Dimostrazione. Innanzi tutto osserviamo che l’affermazione c effettivamente generalizza sia la a che la b:
nelle ipotesi della a, essendo i punti di X ∗ chiusi, la tesi -sempre della a- segue applicando la c prendendo
come chiusi C1 e C2 i singoletti5 dei punti da separare.
`
Siano i e Φ come nella definizione (1), vediamo X come sottospazio di X φ Y via i, in quello che segue
non scriviamo l’inclusione i per non appesantire la notazione. Siano
K1 = Φ−1 (C1 ) , K2 = Φ−1 (C2 ) ,
Z1 = Φ−1 (V1 ) , Z2 = Φ−1 (V2 )
i Ki sono chiusi disgiunti del disco Dn , i Zi sono disgiunti e Zi ⊇ Ki ∩ S n−1 , i = 1, 2 .
A questo punto si ha che,
`
U1 := V1 ∪ Φ(W1 ) e U2 := V2 ∪ Φ(W2 ) sono aperti in X φ Y , separano C1 e C2 ,
dove W1 e W2 sono gli aperti in Dn dell’esercizio (3.2) qui sotto.
Esercizio 3.2. Dati due chiusi disgiunti K1 , K2 ⊆ Dn e due sottospazi Z1 , Z2 ⊆ S n−1 , aperti in S n−1 ,
che separano K1 ∩ S n−1 e K2 ∩ S n−1 (pertanto disgiunti), trovare due aperti W1 , W2 ⊆ Dn tali che:
W1 e W2 separano K1 e K2 ;
risulta W1 ∩ S n−1 = Z1 e W2 ∩ S n−1 = Z2 .
Sottolineiamo che questo esercizio concerne esclusivamente la coppia (Dn , S n−1 ).
◦
∼
◦
Concludiamo questa sezione discutendo come effettuare più incollamenti (anche infiniti) contemporaneamente.
Def. 4. Dato uno spazio X ed una famiglia di terne { Aα , Yα , φα : Aα → X } dove Aα
è un sottospazio chiuso di Yα e φα è una funzione continua, per ogni α, si definisce
.
`
S
X φ Yα := X ∪• • Yα ∼
α
α
α
dove ∼ è la relazione d’equivalenza generata dalle identificazioni del tipo a ∼ φα (a), a ∈ Aα ,
al variare di α, sempre dotato della topologia quoziente.
Anche in questo caso abbiamo
l’inclusione
i : X ֒→ X
`
α
φαYα
e le funzioni caratteristiche Φα : Y ֒→ X
`
α
φαYα
(come nel caso di un solo incollamento, definite componendo le inclusioni di X e degli Yα nell’unione disgiunta
con la proiezione sul quoziente) e continua ad esserci un’identificazione naturale (per ora insiemistica)
(4.1)
X ∗ :=
X ∪• ∪• (Yα r Aα )
α
=
X
`
α
φα Yα
Questa identificazione risulta
essere un omeomorfismo qualora
si doti l’insieme a sinistra X ∗ della topologia
∗
∗
coindotta dalla famiglia i : X ֒→ X , Φα : Yα → X , dove, come nell’osservazione (2), qui le funzioni
i e le Φα sono definite solo in termini di X ∗ : i è l’inclusione e le Φα estendono le φα nella maniera
ovvia. (Stiamo semplicemente dicendo che anche la “definizione alternativa” introdotta con l’esercizio (2.1) si
generalizza al caso di più spazi da incollare ad X ).
3
Ricordiamo che X è un sottospazio chiuso di X ∗ , cfr. esercizio (1.2).
4
Come nella definizione (§0, 1.9), la locuzione “che separano” significa “disgiunti, che contengono rispettivamente”.
5
Un singoletto è un insieme costituito da un punto.
8
C’è una terza alternativa, quanto sopra equivale all’incollamento di un’unione disgiunta:
Esercizio 5. Verificare che data una famiglia di terne come nella definizione (4),
A = ∪• Aα e definito φ ponendo φ|Aα = φα , c’è un omeomorfismo canonico
`
`
X φ Yα ∼
= X φY
α
posto Y = ∪• Yα ,
α
(si osservi che essendo Y dotato della topologia dell’unione disgiunta, A è chiuso in Y ).
Valgono risultati analoghi a quelli dell’esercizio (1.2)
`
per brevità scriveremo X ∗ invece di X φ Yα , in fin dei conti sono spazi canonicamente omeomorfi :
α
′
α
∗
i ) un sottoinsieme U ⊆ X è aperto se e solo se i−1 (U ) e gli Φ−1
α (U ) sono aperti (idem per i chiusi);
ii′ ) X è un sottospazio chiuso di X ∗ ;
iii′ ) ogni Uα := Yα r Aα è un sottospazio aperto di X ∗ .
Infine, anche la proposizione (3.1) si generalizza al coso di più incollamenti:
Proposizione 5.1. Sia X uno spazio topologico, siano
`
Yα = Dn , Aα = S n−1 , φα : Aα −→ X .
X ∗ = X φ Yα ,
α
α
Allora, le affermazioni a, b e c della proposizione (3.1) continuano a valere.
Dimostrazione. La dimostrazione è identica a quella vista nel caso di un solo incollamento. Naturalmente, si
dovranno considerare
S
Ui := Vi α Φα (Wi, α ) , i = 1, 2
(con i Wi, α costruiti come nell’esercizio 3.2, per ogni disco Dαn incollato).
CW-complessi.
Def. 6. Un CW-complesso è una successione di spazi topologici e di incollamenti
`
X 0 ⊆ X 1 ⊆ X 2 ⊆ X 3 ... ,
X n = X n−1 φ Dαn (∀ n ≥ 1)
α
α
(cfr. def. 1 e 4) dove X 0 è uno spazio discreto, i vari Dαn sono copie del disco D n e le
φα : Sαn−1 −→ X n−1
sono funzioni continue (dove Sαn−1 denota l’n−1 sfera “frontiera di Dαn ”).
Def. 6.1. Nella situazione della definizione sopra, i vari spazi X k vengono detti k-scheletri.
Naturalmente si può anche non incollare nulla, anzi siamo interessati proprio a quei CW-complessi dove da
un certo punto in poi non si incolla più nulla, per cui ∃ n | X n = X n+k , ∀ k ∈ N . In questo caso, per un
intero n con la proprietà appena indicata, si pone X = X n e si vede il CW-complesso in questione come
“spazio topologico X che ricorda com’è stato costruito”
(per abuso di linguaggio, X stesso viene chiamato CW-complesso).
Anche qualora un tale intero n non esista, in altri termini nel caso di dimensione infinita (cfr. sotto), piuttosto
che come sequenza di spazi, un CW-complesso viene visto come spazio topologico che ricorda com’è stato
costruito: vi si associa lo spazio topologico
S n
X :=
X
dotato della topologia coindotta dalle inclusioni degli scheletri
(caratterizzata dalla proprietà seguente: un sottoinsieme C ⊆ X è chiuso se e solo se interseca ogni X n in
un chiuso). Si osservi che ogni X n risulta essere un sottospazio chiuso di X , questo perché ogni X n contiene
i precedenti ed è chiuso nei successivi.
9
Inciso. La topologia dei CW-complessi viene indicata come topologia debole. L’uso di questo termine viene
dal fatto che classicamente i CW-complessi vengono introdotti, diversamente da come abbiamo fatto noi, come
unioni disgiunte di “celle” opportunamente topolocizzate: si considera un’unione disgiunta di punti e dischi
aperti, quindi si danno degli assiomi che definiscono una topologia su tale insieme (non entreremo nel merito).
Avendo in mente la definizione da noi data il termine “debole” appare usato impropriamente: nel caso di
dimensione finita n, si ha che X = X n è già uno spazio topologico e non c’e bisogno di aggiungere aggettivi
che specifichino quale sia la sua topologia; in dimensione infinita, X è dotato della topologia finale (i.e. forte,
cfr. def. 3.1) per la famiglia delle inclusioni {X n ֒→ X}.
Poiché non esistono funzioni da un insieme non-vuoto all’insieme vuoto, l’unico CW-complesso il cui 0-scheletro
è l’insieme vuoto è il CW-complesso vuoto. Introduciamo un po’ di terminologia.
(6.2) Una n-cella ℓn è l’immagine del disco aperto D n r S n−1 tramite una funzione caratteristica (cfr. Def. 1 e 4):
ℓn := Φ(D n r S n−1 ) ,
dove Φ = Φα : D n = Dαn −→ X n−1 ⊆ X
(la funzione caratteristica viene vista come funzione di codominio X, piuttosto che l’n-scheletro).
Ricordiamo che per l’esercizio (1.2, iii )), o meglio per la sua generalizzazione al caso di più incollamenti iii ′ )
data poco più avanti, la restrizione Φ|Dn rS n−1 è un omeomorfismo sull’immagine ℓn (la nostra n-cella).
Osserviamo che la n-cella ℓn , è un aperto dell’ n-scheletro (ed è un aperto di X solo a condizione che non
sia coinvolta dagli incollamenti successivi, cioè nelle dimensioni strettamente maggiori di n). Inoltre,
• diremo che X n è stato ottenuto da X n−1 attaccando delle n-celle;
• per convenzione, le 0-celle sono i punti dello 0-scheletro;
• per abuso di linguaggio, la stessa Φα viene chiamata n-cella, la sua immagine viene chiamata n-cella chiusa.
(6.3) La dimensione di un CW-complesso non-vuoto X è il
più piccolo intero n per il quale risulta X = X n
(infinita se un tale intero non esiste, −1 se X = ∅).
(6.4) Un CW-complesso finito è un CW-complesso ottenuto attaccando celle in numero finito
(in particolare, un CW-complesso finito ha dimensione finita).
(6.5) Un sottocomplesso di un CW-complesso X è un CW-complesso X ′ dove, ad ogni step,
le n-celle che si attaccano sono n-celle di X
0
(ovviamente, si richiede che le 0-celle di X ′ siano 0-celle di X , i.e. che risulti X ′ ⊆ X 0 ).
Esercizio 6.6. Sia X un CW-complesso (inteso come spazio topologico che ricorda com’è stato costruito),
si provi che
X ′ è un sottocomplesso di X
⇐⇒
X ′ è un sottospazio chiuso di X ed è unione di n-celle di X.
Suggerimento: per cominciare, si verifichi che X stesso è, insiemisticamente, l’unione disgiunta delle sue celle.
Esempio 6.7. Attaccando una n-cella ad un punto (nell’unico modo possibile) si ottiene la sfera S n . In
alternativa, una volta costruito S n−1 come CW-complesso, la sfera S n può essere realizzata attaccando due
n-celle ad S n−1 tramite l’identità (la frontiera del disco n-dimensionale è una n − 1 sfera).
Sottolineiamo il fatto di avere distinte realizzazioni come CW-complesso dello stesso identico spazio topologico.
Esercizio 6.8. Realizzare, il piano proiettivo reale P2 (R), il piano proiettivo complesso P2 (C), gli spazi
proiettivi reale e complesso n-dimensionali, Pn (R), Pn (C), come CW-complessi.
Suggerimento: lo spazio Pn (R) si può ottenere attaccando una n-cella a Pn−1 (R); lo spazio Pn (C) attaccando
una 2n-cella a Pn−1 (C).
Esercizio 6.9. Realizzare il toro reale Rn /Zn (di dimensione n) come CW-complesso.
Suggerimento: come primo passo si comprenda che R2 /Z2 si può ottenere attaccando una 2-cella alla somma
wedge (cfr. def. 2.6) di due copie del cerchio S 1 (si veda l’esempio 8.3 più avanti). Quindi si proceda per
induzione: si realizzi Rn /Zn attaccando una n-cella alla somma wedge di n copie di Rn−1 /Zn−1 .
10
La proposizione che segue stabilisce, tra altre cose, che i CW-complessi sono spazi di Hausdorff 6 e la cosiddetta
closure finiteness : il fatto che la chiusura di ogni cella ha intersezione non vuota con al più un numero finito
di altre celle (n.b.: una cella chiusa, in quanto immagine continua di un disco Dn , è compatta).
Proposizione 6.10. Sia X un un CW-complesso, K ⊆ X un sotospazio compatto. Allora
i)
X è T4, in particolare è di Hausdorff;
ii)
K è contenuto in un sottocomplesso finito di X
(in particolare, K può avere intersezione non-vuota solamente con un numero finito di celle).
Dimostrazione. Assumiamo che X abbia dimensione finita. La i) segue dalla proposizione (5.1, b) per
ragioni induttive.
Proviamo la ii) (sempre nel caso di dimensione finita). Assumendo induttivamente7 che, per ogni compatto
H ⊆ X , l’intersezione con l’n−1 scheletro H ∩ X n−1 sia contenuta in un sottocomplesso finito di X n−1 , è
sufficiente provare la proprietà seguente:
Sm
(♣)
un compatto K ha intersezione non vuota con un’unione finita di n-celle α=1 ℓα
S
(infatti, sarà sufficiente applicare l’ipotesi induttiva ad H = K
ℓα , che è compatto perché la chiusura di
una n-cella è compatta in quanto immagine continua di un disco).
Proviamo la proprietà (♣): l’insieme Z ⊆ K ottenuto scegliendo un punto da ogni n-cella che ha intersezione
non vuota con K è chiuso ed ha la topologia discreta (in quanto ogni suo sottoinsieme, compreso Z stesso, è
chiuso in X), è compatto (in quanto chiuso in un compatto), quindi è necessariamente finito.
Il caso generale è più delicato ma non dissimile nella sostanza, lo trattiamo separatamente (subito sotto).
Dimostrazione (della Proposizione 6.10 nel caso generale).
Sia X un CW-complesso, C1 , C2 ⊆ X due chiusi. Applicando la (5.1, c), costruiamo induttivamente
U1, n , U2, n , aperti dell’n-scheletro X n , tali che
U1, n e U2, n separano C1 ∩ X n e C2 ∩ X n , risulta Uj, m = Uj, n ∩ X m per m ≤ n.
S
S
Gli spazi U1 :=
U1, n e U2 :=
U2, n separano C1 e C2 in X . Infatti, sono aperti perché X ha
la topologia coindotta dagli scheletri, sono disgiunti per costruzione, contengono rispettivamente C1 e C2
sempre per costruzione. Questo dimostra che X è T4.
Per quanto concerne l’affermazione ii), una volta esclusa l’eventualità che possa esistere una successione
infinita di punti pi ∈ K ∩ (X ni r X ni −1 ) con gli ni strettamente crescenti (cosa immediata perché un
tale insieme sarebbe chiuso ed avrebbe la topologia discreta e questo è assurdo perché un compatto non può
contenere sottospazi chiusi discreti infiniti), possiamo affermare che K è contenuto in un qualche scheletro e
concludere grazie al caso, trattato precedentemente, di dimensione finita.
◦
∼
◦
Introduciamo ora un importante numero associato ai CW-complessi finiti.
Def. 7. La caratteristica di Eulero Poincaré di un CW-complesso finito X è la somma
P
χ(X) :=
(−1)i ℓi ,
dove ℓi denota il numero delle i-celle.
Nel paragrafo §3, sezione omologia cellulare (cfr. §3, Cor. 54), vedremo il seguente importante risultato:
(7.1)
χ(X) è un invariante omologico del soggiacente spazio topologico X e, come
tale, non dipende dalla realizzazione di X come CW-complesso.
6
Nella definizione assiomatica, si veda l’inciso che segue la def. (6.1), tra i vari assiomi si richiede esplicitamente che i CW-complessi
siano di Hausdorff. Per come li abbiamo introdotti noi (definizione costruttiva 6), il fatto che i CW-complessi siano di Hausdorff
è una Proposizione, va dimostrato!
7
Fissiamo la base dell’induzione nel caso banale n = 0 , X −1 := ∅ .
11
◦
∼
◦
Con gli esempi che seguono caratterizziamo i CW-domplessi di dimensione 0 ed 1, diamo inoltre un’ampia
classe di CW-domplessi di dimensione 2 (che più avanti utilizzeremo per classificare le superfici topologiche
compatte).
Esempio 8.1. I CW-complessi di dimensione 0 sono gli spazi topologici discreti.
Esempio 8.2 “Grafi ” (CW-complessi di dimensione 1).
Si parte dallo 0-scheletro X 0 (come sempre) e vi si attaccano copie del disco
D1 = [−1, 1] tramite funzioni φα : S 0 = {−1, 1} → X 0 (n.b.: una tale
funzione di fatto è un punto del prodotto cartesiano X 0 ×X 0 ).
Si ottiene qualcosa come in figura (quello raffigurato è un grafo non connesso,
finito; naturalmente si possono anche avere grafi infiniti).
Nota. La definizione combinatorica di grafo prevede un insieme X 0 , un altro insieme A ed una funzione
ω : A −→ X 0 ×s X 0 (prodotto cartesiano simmetrico); ad ogni elemento α ∈ A corrisponde un “lato”. Le
funzioni φα del nostro CW-complesso di dimensione 1 danno lati orientati (si parla di grafi orientati).
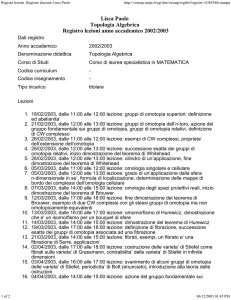
Esempio 8.3 “Poligoni con identificazioni ”. Sia P un poligono di n lati ed A una parola
di n lettere (queste, con eventuale esponente −1). Scelto un vertice di partenza ed un senso
di percorrenza del perimetro di P, abbiamo una corrispondenza biunivoca
“ lettere di A”
←−−→
“ lati di P ”.
Orientiamo ogni lato coerentemente con l’esponente della sua lettera ed identifichiamo tra loro
lati orientati corrispondenti ad una stessa lettera.
λ−1
µ
ν
Nei due esempi in figura abbiamo scelto il punto “o” ed
il senso antiorario. Il primo di essi rappresenta un Toro,
il secondo è decisamente più complicato. Si osservi che
ci possono essere lati non coinvolti affatto da identificazioni
(quelli corrispondenti a lettere che appaiono una sola volta).
µ−1
λ
S(A)
λ
α
µ
o
A = λµλ−1 µ−1
Introduciamo la notazione che segue (cfr. def. 2)
(8.3 ′ )
:=
µ
µ
o
λ
A = λµµλ−1 ν µ−1 α
P/ ∼
dove ∼ denota la relazione d’equivalenza associata alle identificazioni (definite dalla parola A). Questo spazio
topologico, per brevità lo chiamiamo poligono con identificazioni. Sottolineiamo che una parola arbitraria
definisce un poligono con identificazioni. Osserviamo che se le lettere di A sono distinte non ci sono affatto
identificazioni da fare, ∼ è la relazione banale ed S(A) = P/ ∼ = P è omeomorfo al disco D2 .
Chiaramente può accadere che due parole definiscano esattamente lo stesso poligono con identificazioni, ciò
accade per parole che differiscono
(
• circolarmente: “ .....
A .....
B ” e “ .....
B .....
A ”, i.e. che si ottengono per scelte diverse del vertice;
(♣)
• specularmente: una parola e la sua inversa formale (e.g. “... α−1 µν −1 ” e “ ν µ−1 α ...”),
i.e. che si ottengono per scelte diverse del senso di percorrenza del perimetro.
Un poligono con identificazioni ha una naturale struttura di CW-complesso: possiamo vedere
P/ ∼ come
spazio ottenuto da X 1 := ∂ P/ ∼ ∂ P denota il perimetro di P, “∼” le identificazioni8 attaccandovi una
2-cella. Precisamente, nella notazione introdotta nella sezione “Incollamenti” abbiamo
`
(8.3 ′′ )
P/ ∼ = X 1 φ D2
dove φ : S 1 −→ X 1 è la composizione S 1 −→ ∂ P −→ ∂ P/ ∼ (il primo morfismo è l’omeomorfismo ovvio).
Naturalmente va osservato che lo spazio X 1 è un grafo (cfr. esempio 8.2), quindi ha una naturale struttura di
CW-complesso di dimensione 1: le classi dei vertici costituiranno lo 0-scheletro (saranno in numero compreso
tra 1 ed n), quelle dei lati l’uno-scheletro. Sottolineiamo che si attacca una sola 2-cella (formula 8.3 ′′ ).
8
Che, ad essere pignoli, qui consideriamo come relazione su ∂ P .
12
`
Convenzione 8.4. Usiamo l’incollamento X 1 φ D2 per dare un senso ad S(A) anche quando la parola
A ha due lettere, una lettera, è la parola vuota . Abbiamo, rispettivamente, un cerchio con identificazioni sul
quale sono marcati due punti; un cerchio sul quale è marcato un
punto; un punto. Quindi incolliamo un disco.
Naturalmente, nel terzo caso si ha X 1 = X 0 = {o} e la funzione
o
di incollamento φ fa l’unica cosa possibile: manda S 1 in o, la
superficie che si ottiene è omeomorfa alla sfera (si contrae S 1 , la
due lati
un lato
zero lati
frontiera di D2 , ad un punto).
Elenchiamo i casi possibili: S(λµ) = D2 , S(λλ) = P2 (R), S(λλ−1 ) = S 2 , S(λ) = D2 , S(∅) = S 2 .
Esercizio 8.5. Verificare le identità che seguono:
i) S(aba−1 c) = S 1 × [0, 1] (cilindro compatto);
ii) S(parola) = “nastro di Möbius con bordo” = S(aab) = P2 (R) r B
(dove B denota l’interiore di un dischetto chiuso9 ).
Suggerimento: naturalmente S(parola) = S(abac). Che risulti S(abac) = S(aab) può essere verificato
direttamente utilizzando la tecnica del cut & paste introdotta più avanti (cfr. 9.6).
Esempio 8.6 (Varietà topologiche triangolate). Una varietà topologica sulla quale sia definita
una triangolazione ha una naturale struttura di CW-complesso.
Per definizione, una varietà topologica è uno spazio topologico di Hausdorff dove ogni punto ha un intorno
omeomorfo ad Rn (cfr. §5, introduzione), in questo caso diremo che X ha dimensione 10 n. Sia X una
varietà topologica di dimensione n. Fissiamo subito una notazione:
P
∆n = x ∈ Rn xi ≥ 1 ∀ i ,
xi ≤ 1
(dove gli xi denotano le coordinate di x);
l’inviluppo convesso di un sottoinsieme proprio e non-vuoto dei vertici di ∆n lo chiameremo faccia.
• Un n-triangolo in X è un sottospazio T che in una qualche carta locale si identifica con ∆n . Precisamente,
si richiede che esistano un aperto U ⊇ T ed un omeomorfismo ϕ : U → Rn (la carta locale) tali che
ϕ(T ) = ∆n . Un vertice di T è l’immagine via ϕ−1 di un vertice di ∆n ed una faccia di T è l’immagine
via ϕ−1 di una faccia, di ∆n (n.b.: i vertici sono, in particolare, facce).
• Una triangolazione di X è un ricoprimento in n-triangoli che soddisfi le proprietà seguenti: due triangoli
possono esclusivamente avere intersezione vuota o condividere esattamente una faccia; ogni vertice v
ammette una carta locale ϕ centrata in v dove la triangolazione appare come unione finita di coni in Rn
di vertice ϕ(v) (di conseguenza, l’insieme dei vertici è discreto, ogni vertice è vertice di un numero finito
di triangoli ed ogni faccia di dimensione n − 1 è faccia di esattamente due triangoli).
Una varietà topologica triangolata X è una varietà topologica dotata di una triangolazione. Questa ha una
naturale struttura di CW-complesso dove i vertici costituiscono lo 0-scheletro, le facce di dimensione uno
costituiscono l’uno-scheletro e cosı̀ via fino ad n (la dimensione di X ). Di conseguenza, se X è compatta, la
triangolazione è finita (di ciò, se ne dia una dimostrazione diretta, i.e. che utilizzi solamente la definizione di
triangolazione).
Nella sezione che segue ci occupiamo del caso delle superfici, i.e. dove n = 2.
9
Un dischetto chiuso D è un sottospazio omeomorfo al disco chiuso D 2 (cfr. §0, notazione 1.6), ai fini di questo esercizio non
ci preoccupiamo della forma di D, che quindi assumiamo “ragionevole”. Il punto è che a priori non è affatto ovvio, sebbene sia
◦
vero, che la classe di omeomorfismo dello spazio P2 (R) r B (essendo B = D) non dipenda dal disco D (cfr. esempio 13).
Vedremo che la dimensione è univocamente determinata: più in generale, di fatto equivalentemente, dati U aperto di Rn e V
aperto di Rm , se U e V sono omeomorfi, allora n = m (quanto affermato non è affatto ovvio a priori).
10
13
Classificazione delle superfici compatte.
Ricordiamo che una superficie topologica è uno spazio topologico di Hausdorff dove ogni punto ha un intorno
omeomorfo ad R2 (cfr. §5, introduzione).
Una superficie compatta può essere triangolata11 . Una triangolazione, necessariamente finita per ragioni di
compattezza, consente di stabilire un omeomorfismo con un poligono12 con identificazioni (cfr. esempio 8.3),
soddisfacente la proprietà di avere i lati identificati a coppie. Con la tecnica del “cut & paste” è possibile semplificare la sequenza delle identificazioni ed elencare tutti i casi possibili, in modo da ottenere la classificazione
completa delle superfici topologiche compatte connesse. Iniziamo con un esempio.
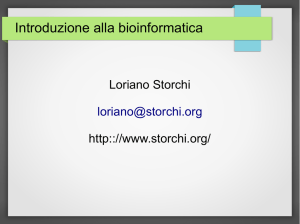
Esempio 9.1. Attaccando (cfr. Def. 5) una 2-cella D2 ad un bouquet di 2g cerchi (1-sfere) B tramite la
composizione
φ = ϕ ◦ ω : S 1 −→ B
indicata in figura, disegnata per g = 2, si ottiene una superficie compatta orientabile di genere g.
λ2
µ2
S
1
=
ω
−−−→
µ1
µ1
λ1
λ2
ϕ
−−−→
λ2
= B
• o
λ1
µ2
µ1
o
•
µ2
λ1
B
`
φ
D 2 = C2 = “
”
(il genere di una superficie compatta connessa orientabile è un
intero che “conta il numero dei buchi”, per ora non ci preoccupiamo di darne una definizione formale).
Si osservi che tutti i vertici dell’ottagono si identificano con o. Non si esclude il caso dove g = 0 : in questo
caso, il bouquet è banale (c’è solo il vertice o), la funzione di incollamento φ manda il cerchio S 1 in o e
la superficie che si ottiene è omeomorfa alla sfera (si contrae S 1 , la frontiera di D2 , ad un punto). Nella
−1
−1 −1
notazione dell’esempio (8.3), si ha Cg = S(λ1 µ1 λ−1
1 µ1 ... λg µg λg µg ). Ci sono due cose da comprendere:
i) effettivamente si ottiene una superficie topologica compatta connessa;
ii) la superficie che si ottiene ha genere g.
La prima rientra in un risultato più generale che proponiamo come esercizio con suggerimento (cfr. 9.2). Anche
la seconda rientra in un discorso più generale: cfr. inciso (9.4) e lemma (9.5).
Esercizio 9.2. Provare che se si sostituisce l’ottagono con un qualsiasi poligono con i lati identificati a coppie
(per il resto, in modo del tutto arbitrario), lo spazio topologico che si ottiene è necessariamente una superficie
topologica compatta connessa.
Suggerimento: si deve provare che ogni punto ha un intorno omeomorfo ad un disco (compattezza e connessione
sono ovvie, lo spazio ottenuto è di Hausdorff per la proposizione 3.1, a). Prima delle identificazioni, ogni punto
p ammette un intorno omeomorfo ad uno spicchio di torta; distinguere i tre casi: “p interno al poligono” (torta
intera), “p interno ad uno dei lati” (mezza torta), “p vertice” (quest’ultimo è il caso più interessante).
Esercizio 9.3. Provare il “viceversa”: se i lati non sono identificati a coppie, lo spazio quoziente non è una
superficie topologica.
Naturalmente, le identificazioni descritte da una parola A sono “a coppie” se e solo se ogni lettera compare
esattamente due volte. Per gli esercizi (9.2) e (9.3) abbiamo quanto segue:
un poligono con identificazioni P/∼ = S(A) (cfr. 8.3) è una superficie topologica compatta
se e solo se ogni lettera di A compare esattamente due volte.
Inciso 9.4 (“Somma connessa”). La somma connessa X # Y di superfici si definisce privando ciascuna
dell’interiore di un disco chiuso ed identificando tra loro le frontiere dei due dischi tramite un omeomorfismo
`
∼
=
φ : SY −−→ SX ⊆ X rBX
X #Y
:=
X rBX
φ Y rBY ,
dove BX e BY denotano gli interiori dei due dischi chiusi, SX e SY le rispettive frontiere (sono dei cerchi).
Modulo omeomorfismi, il risultato che si ottiene non dipende dalle scelte effettuate (preferiamo non soffermarci
11
Questo è un punto piuttosto delicato sul quale torneremo, cfr. affermazione (10.1) e nota (12).
12
Più di uno, se la superficie non è connessa.
14
su questo risultato13, 14 ). La figura che segue illustra più efficacemente di qualsiasi discorso come realizzare la
somma connessa di due superfici che siano state date come poligoni con lati identificati a coppie
X #Y
..
.
..
.
..
.
p
p
p
p
p
p
..
.
..
.
..
.
p
p
(le piccole parti tratteggiate indicano i dischetti che vengono rimossi). Nella notazione introdotta sopra,
se X = S( .....
A ) ed Y = S( .....
B ),
(♣)
allora X #Y = S( .....
A .....
B )
Attenzione! Affinché la figura sopra sia rappresentativa della situazione, c’è una condizione che deve essere
soddisfatta (e che nel caso dei poligoni coi lati identificati a coppie è
automaticamente soddisfatta, ciò richiede una breve dimostrazione che
..
..
x
Ω
.
.
lasciamo per esercizio): la condizione è che in Ω (cfr. figura a lato) le
p
p
identificazioni sui lati inducano l’uguaglianza p = x.
Nota. Volendo generalizzare la costruzione vista a poligoni con identificazioni arbitrarie, pur assumendo
di rimuovere dischetti come in figura, la condizione menzionata è necessaria: ad esempio, se non ci sono
identificazioni, i.e. ogni lettera compare esattamente una volta, allora S( .....
A .....
B ) (che è un disco) non è ciò
che dovrebbe essere (per .....
A e .....
B entrambe parole non vuote).
Torniamo al caso della somma connessa di superfici. Descrivendo superfici distinte, le parole .....
A e .....
B
non hanno lettere in comune: nel poligono di X #Y non ci sono lati della parte destra (cfr. figura) che si
identificano con lati di quella sinistra. C’è un’utile chiave di lettura di quanto appena visto:
Lemma 9.5. Una superficie del tipo S( .....
A .....
B ) con “ .....
A ” e “ .....
B ” senza lettere in comune è la somma
connessa delle superfici S( .....
A ) e S( .....
B ): nell’ipotesi indicata risulta S( .....
A .....
B ) = S( .....
A ) # S( .....
B ).
µ
Poiché S(λ µ λ−1 µ−1 ) = Toro (cfr. figura a lato), dal lemma (9.5) segue che
S λ1 µ1 λ−1
µ−1
... λg µg λg−1 µ−1
1
1
g
λ
λ
è la somma connessa di g copie del toro (per ragioni induttive). Ciò prova la (9.1, ii )).
•o
µ
Inciso 9.6 (Tecnica del “cut & paste”). Dato un poligono con identificazioni, se prima lo tagliamo e poi
incolliamo i due poligoni ottenuti secondo una delle vecchie identificazioni (vedi figura), otteniamo un nuovo
poligono con identificazioni che definisce la stessa superficie compatta del vecchio poligono
λ
λµλµ−1
µ
µ
µ
µ
σ
λ
λ
λ
µ
σ
µ
λ
σ
σ
•o
µ2 σ 2
σ
µ
σ
µ
•o
L’esempio in figura mostra che il quadrato modulo le identificazioni “λ µ λ µ−1 ” ed il quadrato modulo le
identificazioni “µ2 σ 2 ” definiscono la stessa superficie (la bottiglia di Klein).
Nel caso della figura abbiamo S(λ µ λ µ−1 ) = S(µ2 σ 2 ), più in generale (la figura di fatto è la stessa) si ha
•
S( λ .....
A λ .....
B ) = S( σ 2 .....
A .....
B − ) , dove .....
B−
denota (.....
B )−1
Valgono altre due proprietà (la prima si evince dal disegno a lato; la seconda la lasciamo per esercizio: si
disegnino poligoni e tagli):
A
λ−1
.....
• S(λ λ−1 .....
A ) = S( .....
A )
•
S( λ .....
A µ .....
B λ−1 .....
C µ−1 .....
D ) = S( σ τ σ −1 τ −1 .....
A .....
D .....
C .....
B )
λ
•o
(sopra, le varie parti “ .....
A ”, “ .....
B ” eccetera, possono anche essere vuote).
13
Là dove un disco in una superficie è solamente un sottospazio omeomorfo a D 2 , conoscere ciò che si rimuove non significa
conoscere ciò che resta e nel provare questa affermazione si incontrano delle difficoltà (con qualche accorgimento superabili grazie
al teorema di Jordan-Schoenflies enunciato più avanti, cfr. esempio 13).
14
Attenzione: questo risultato non si generalizza a varietà topologiche di dimensione strettamente maggiore di 2.
15
La tecnica del “cut & paste” consiste nel modificare una parola, i.e. il modo di rappresentare una superficie,
usando le regole indicate, incluse modifiche circolari e speculari (8.3, ♣) e l’utilizzo del lemma (9.5).
Come vedremo tra poco, tale tecnica consente di semplificare la sequenza delle identificazioni ed elencare tutti
i casi possibili:
sequenza delle identificazioni
(10)
superficie
descrizione
λ1 µ1 λ−1
µ−1
... λg µg λ−1
µ−1
1
1
g
g
Cg
superficie orientata di genere g (g ≥ 0)
(= somma connessa di g tori)
λ21 ... λ2m
P2 (R) # ... # P2 (R)
somma connessa di m piani proiettivi (m ≥ 1)
Teorema (di Classificazione). Ogni superficie topologica compatta connessa è omeomorfa ad
una, ed una sola, delle superfici della lista (10), che pertanto è esaustiva e senza ripetizioni.
Ricapitolando, abbiamo i quattro risultati che seguono (ai quali si riduce il teorema di classificazione).
(10.1) Ogni superficie topologica compatta ammette una triangolazione finita.
(10.2) Ogni superficie topologica compatta connessa, dotata di una triangolazione finita, è omeomorfa ad un
poligono con i lati identificati a coppie.
(10.3) Con la tecnica del “cut & paste” è possibile semplificare la sequenza delle identificazioni e ricondursi
sempre ad uno dei casi elencati nella lista.
(10.4) Le superfici elencate nella lista (10) sono effettivamente distinte (non omeomorfe tra loro).
Il risultato (10.1) è molto profondo (cfr. nota 12), non lo dimostreremo15 .
La (10.2) è elementare (sarà sufficiente disporre i triangoli nel piano), la lasciamo per esercizio.
Dimostrazione (della 10.3 e della 10.4).
Proviamo la (10.3). Poiché ogni lettera compare esattamente due volte abbiamo la seguente dicotomia:
i) ogni lettera compare sia con esponente 1 che −1 ;
ii) la parola è del tipo λ .....
A λ .....
B .
Proveremo, trattando separatamente i due casi, che con la tecnica del “cut & paste” possiamo ricondurre le
parole dei due tipi rispettivamente a parole dei due tipi della lista (10)
i′ ) λ1 µ1 λ−1
µ−1
... λg µg λg−1 µ−1
e
ii′ ) λ21 ... λ2m .
1
1
g
In entrambi i casi ragioniamo per induzione sulla lunghezza della parola. Useremo senza menzione esplicita le
identità circolare e speculare (8.3, ♣), e la semplificazione degli eventuali “...λλ−1 ...”.
La riduzione da i) a i′ ) segue subito dall’ipotesi induttiva e dalle uguaglianze (cfr. regole del cut & paste)
S(λ .....
A µ .....
B λ−1 .....
C µ−1 .....
D ) = S(στ σ −1 τ −1 .....
A .....
D .....
C .....
B ) = S(στ σ −1 τ −1 ) # S(.....
A .....
D .....
C .....
B )
(n.b.: la parola è sicuramente del tipo a sinistra: scelta una lettera λ che abbia distanza minima dall’inversa
λ−1 , nel segmento tra λ e λ−1 non ci sono lettere che compaiono due volte).
Effettuiamo la riduzione da ii) a ii′ ). Scriviamo S(λ .....
A λ .....
B ) = S(σ 2 .....
A .....
B − ) = S(σ 2 ) # S(.....
C )
−
(cfr. regole del cut & paste). Se .....
C = .....
A .....
B
è sempre del secondo tipo concludiamo per ragioni
induttive. Altrimenti scriviamo .....
C = µ .....
D µ−1 .....
E e, tornando a S(σ 2 .....
C ), di nuovo per le regole del
2
2
−1
cut & paste abbiamo S(σ .....
C ) = S(σ µ .....
D µ .....
E ) = S(τ µ .....
D τ µ .....
E − ). La sostituzione ω = τ µ
accorcia la lunghezza della parola (due lettere diventano una), di nuovo concludiamo per ragioni induttive.
Proviamo la (10.4). Un poligono con identificazioni del tipo i) è orientabile, invece uno con identificazioni
del tipo ii) non lo è. Chiariremo questo punto quando affronteremo il discorso sull’orientazione, per ora ci
limitiamo ad una considerazione grafica: un poligono con identificazioni contiene un nastro di Möbius se e
solo se è del secondo tipo. Quindi, una superficie del primo tipo non è mai omeomorfa ad una superficie del
secondo. Le formule dell’inciso (11.2) sotto ci dicono che le superfici delle lista (10), di uno fissato dei due tipi,
hanno caratteristica di Eulero-Poincaré distinta. Per la (7.1) concludiamo.
Nota 10.5. Introducendo la somma connessa (inciso 9.4) abbiamo affermato che il risultato, modulo omeomorfismi, non dipende dalle scelte effettuate; nello specifico, le scelte dei dischi e dell’omeomorfismo che ne
identifichi le frontiere. Nella dimostrazione della (10.3) abbiamo usato la somma connessa, senza un risultato
15
In fin dei conti, si tratta di un risultato molto ragionevole. Peraltro, ogni superficie, come dire, “esplicita”, che possa venire
in mente, si dota di una triangolazione senza troppe difficoltà; avere un Teorema di Classificazione “solamente” per le superfici
triangolabili è comunque un risultato di assoluto rilievo.
16
che ci dica che questa non dipende dalle scelte insite nella sua definizione, l’argomento esposto appare incompleto. Di fatto non è cosı̀, ce la possiamo cavare in almeno due modi: i) avendo a che fare con poligoni
con identificazioni, nella definizione di somma connessa possiamo chiedere che si rimuovano dischetti “veri”
(siamo in R2 ), questo elimina ogni problema; ii) ai fini del lavoro svolto, avremmo potuto persino evitare di
dare la definizione di somma connessa, volendo lasciare cosı̀ com’è tutto quello che abbiamo scritto sarebbe
(♣)
stato assolutamente sufficiente dare l’uguaglianza S( .....
A )#S( .....
B ) = S( .....
A .....
B ) come “definizione naı̈ve di
somma connessa”, sempre nell’ipotesi che le parole .....
A e .....
B non abbiano lettere in comune16 .
Vediamo alcuni casi particolari e, tra parentesi, sequenze di identificazioni alternative:
identificazioni
alternativa
∅
λµλ−1 µ−1
λ2
λ2 µ2
(λλ−1 )
(λµλµ)
(λµλµ−1 )
superficie
descrizione
C0 = S 2
C1 = T
P2 (R)
K ∼
= P2 (R) # P2 (R)
sfera
toro
piano proiettivo
bottiglia di Klein
La somma connessa di superfici connesse è associativa e commutativa, la sfera S 2 è un elemento neutro per la
somma connessa, i.e. C # S 2 ∼
= C, ∀ C . Inoltre risulta P2 (R) # T ∼
= P2 (R) # K (attenzione, per la somma
connessa non vale la legge di cancellazione!).
Osservazione 11.1. Quanto sopra, precisamente
# è assoc. e comm., S 2 è un elemento neutro,
K ∼
= T # ... # T ,
= P2 (R) # P2 (R) , Cg ∼
P2 (R) # T ∼
= P2 (R) # K ,
consente di dire qual è la superficie che si ottiene effettuando una qualsiasi combinazione di somme connesse
che coinvolga sfere, piani proiettivi, tori e bottiglie di Klein.
Inciso 11.2. Si considerino le superfici compatte e la loro realizzazione effettuata secondo la rappresentazione
della lista (10). Lo 0-scheletro di Cg è costituito da un punto p, l’uno scheletro da un bouquet di 2g
cerchi (si attaccano 2g 1-celle al punto p), il 2-scheletro si ottiene attaccando una 2-cella all’uno scheletro.
Pertanto χ(Cg ) := 1 − 2g + 1 = 2 − 2g. Nel caso della somma connessa di m piani proiettivi P2 (R)#m =
P2 (R)#...#P2 (R), si ha di nuovo una 0-cella ed una 2-cella, mentre le 1-celle sono m (l’uno scheletro è
costituito da un bouquet di m cerchi), quindi χ(P2 (R)#m ) := 1 − m + 1 = 2 − m. Riassumendo:
χ(Cg )
=
2 − 2g ;
χ
#m
P 2 (R)
=
2−m .
Esempio 11.3. Come già osservato (cfr. esempio 8.6), una varietà topologica dotata di una triangolazione
finita ha una naturale struttura di CW-complesso finito, in particolare è compatta. I vertici della triangolazione
costituiscono lo 0-scheletro, gli 1-spigoli l’uno scheletro e cosı̀ via. Nel caso di una superficie S dotata di una
triangolazione finita abbiamo pertanto la seguente formula
χ(S)
(definizione 7)
=
v
(vertici)
−
l
(lati)
+
t
(triangoli)
Si svolga l’esercizio che segue senza utilizzare il risultato (7.1).
Esercizio 11.4. Siano S ed M due superfici compatte dotate di triangolazioni finite (di conseguenza,
realizzate come CW-complessi finiti). Supponiamo di effettuarne la somma connessa rimuovendo gli interiori
di dischi chiusi DS ⊆ S e DM ⊆ M che siano sottocomplessi (i.e. “unione di triangoli”), ed identificando le
frontiere ∂DS e ∂DM . Realizzare S#M come CW-complesso (attenzione, a priori S#M non sarà “ben
triangolata” e nel realizzarla come CW-complesso c’è un minimo di libertà di scelta, questo perché i cerchi
∂DS e ∂DM , che identifichiamo, hanno ognuno una sua struttura di CW-complesso). Provare che
(11.4′ )
χ(S#M)
=
χ(S) + χ(M) − 2 .
Suggerimento: provare che χ(D) = 1 e che χ(∂D) = 0 (D disco chiuso, ∂D cerchio).
Esercizio 11.5. Si considerino decomposizioni P2 (R) #m = S#M e Cg = T #g = S#M. Verificare che
la formula (11.4′ ) è compatibile con i risultati dell’inciso (11.2).
16
C’è una precisazione da fare: dando l’uguaglianza (♣) come definizione invece che come lemma, la dimostrazione della (10.3)
continua a funzionare immutata a condizione che si provi, cosa non difficile, l’identità S( .....
A .....
B ) = S( .....
A .....
C ) per .....
A come
nella classificazione, .....
B e .....
C che differiscono circolarmente o specularmente (cfr. 8.3, ♣).
17
Nota 12. Tornando all’affermazione (10.1), per triangolare una superficie topologica compatta si comincerà,
ad esempio, col considerare triangoli su ogni carta locale, i problemi nascono passando da una carta all’altra:
quello che in una carta locale appare come un segmento, in un’altra carta potrà essere quasi ingestibile, come
la curva φ dell’esempio che segue.
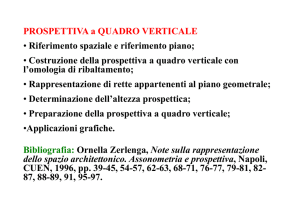
Esempio 13 (Strani segmenti e triangoli). Definiamo una funzione φ : I = [0, 7] −→ R2 come segue:
poniamo φ(0) = a, φ(7) = h (vertici opposti di un quadrato) e mandiamo i tre intervalli [1, 2], [3, 4], [5, 6]
linearmente nei tre segmenti [b, c], [d, e], [f, g] (vedi figura 1):
figura 1
f
h = φ(7)
Q3
•
0
1
2
3
4
5
6
•
7
φ
−−−→
h
Q4
g
e
d
b
Q1
a
= φ(0)
figura 2
µ
Q2
c
T
a
λ
o
Resta da definire φ(t) per t interno ai quattro intervalli I1 := [0, 1], I2 := [2, 3], I3 := [4, 5], I4 := [6, 7] .
Ripetiamo la costruzione sopra con le quattro coppie Ii , Qi (dove i Qi sono i quattro quadrati indicati).
Iteriamo questo procedimento (la figura 2 rappresenta una parte di cosa si ottiene dopo tre passi). A questo
punto φ(t) è definita per i valori di t ∈ I che in base sette hanno almeno una cifra dispari o un’espressione
finita. Infine, per t con infinite cifre pari non nulle (sempre scritto in base sette) definiamo φ(t) := lim φ(tn ),
n→∞
dove tn denota il troncamento di t alle prime n cifre, tutto in base sette.
La funzione φ risulta ben definita, continua e iniettiva,
(♠)
la sua immagine contiene il complementare delle varie “croci”
(la prima è il complementare dell’unione di Qi , le quattro successive sono le anologhe croci interne ad ognuno
dei Qi , le 16 successive quelle relative ai 16 quadrati del secondo passo eccetera). Se chiudiamo φ, ad esempio
utilizzando λ e µ come in figura 2, otteniamo una cosiddetta curva semplice chiusa , i.e. una funzione continua
iniettiva ω : S 1 −→ R2 (una tale curva viene anche detta curva di Jordan).
La dimostrazione di quanto sopra è macchinosa da scrivere ma tutto sommato elementare (non la scriveremo).
La curva semplice chiusa costruita delimita un triangolo (cfr. esempio 8.6), T in figura. Questo risultato segue
da due Teoremi profondi (li citiamo entrambi, sebbene di fatto il secondo generalizzi il primo), questi teoremi
ci dicono che se ω : S 1 −→ R2 è una curva semplice chiusa, allora:
• R2 rIm ω ha due componenti connesse, delle quali Im ω ne è la frontiera comune (teorema di Jordan);
• ω si estende ad un omeomorfismo del piano in se (teorema di Jordan-Schoenflies).
Nel nostro caso, per T che denota la chiusura della componente limitata di R2 rIm ω, la coppia (R2 , T ) è
omeomorfa alla coppia (R2 , D2 ). Si noti che la scelta di tre vertici, ad esempio i punti a, h ed o, rende T
un triangolo, il lato a h è l’immagine di φ. L’aspetto bizzarro è che questo lato può avere “area”, o meglio
misura di Lebesgue in R2 , strettamente positiva: per la proprietà (♠), affinché ciò accada basterà scegliere le
varie croci (cfr. sopra), che sono in quantità numerabile, in modo che la serie delle loro aree converga ad un
valore strettamente inferiore alla misura dell’area del quadrato grande.
La stessa identica costruzione si può fare con i quadrati adiacenti (croci vuote), in questo caso φ perde
l’iniettività ma guadagna la suriettività (sempre sul quadrato grande): si ottiene una variante della famosa
curva di Peano, una funzione continua suriettiva da I ad I × I .
Esercizio 14. Provare che non esiste nessuna funzione continua biunivoca da I ad I × I .
Suggerimento. Per ragioni di compattezza una tale funzione sarebbe un omeomorfismo.
18
§ 2.
Omotopia.
Questa teoria è essenzialmente legata al nome di H. Poincaré.
Def. 1. Siano X ed Y due spazi topologici, sia A ⊆ X un sottoinsieme (arbitrario).
Due funzioni f : X −→ Y e g : X −→ Y si dicono omotope relativamente ad A,
scriveremo f ∼A g, se esiste una deformazione continua che le collega lasciando fissi i punti
di A, formalmente:
(
H(x, 0) = f (x)
H(x, 1) = g(x)
f ∼A g
⇐⇒
∃ H : X × I −→ Y t.c.
,
H(a, t) = f (a) = g(a)
∀ x ∈ X, a ∈ A, t ∈ I
Una tale H si chiama omotopia relativa ad A di f e g
(n.b.: affinché f e g possano essere omotope relativamente ad A, devono coincidere su A).
(1.1) L’omotopia relativa ad A è una relazione d’equivalenza su C(X, Y ) (l’insieme delle funzioni continue
da X a Y ). Infatti, che ∼A sia riflessiva e simmetrica è evidente, quanto alla transitività, date H,
omotopia relativa ad A di f e f ′ , ed H ′ , omotopia relativa ad A di f ′ e f ′′ , è sufficiente considerare
H(x, 2t) ,
t ≤ 12
.
K(x, t) :=
′
H (x, 2t − 1) , t ≥ 12
(1.2) Se B ⊇ A, la relazione ∼B è più fine della relazione ∼A (cioè f ∼B g =⇒ f ∼A g), in particolare
l’omotopia relativa all’insieme vuoto ∼∅ è la meno fine tra le relazioni d’omotopia. La relazione ∼X è
la relazione d’uguaglianza.
k
(1.3) L’omotopia di funzioni è stabile rispetto alla composizione: dati dei morfismi W −→ X
f
−→
−→
h
Y −→ Z , si
g
ha che
f ∼A g
=⇒
f ◦ k ∼k−1 (A) g ◦ k ,
h ◦ f ∼A h ◦ g
(per provare questa proprietà è sufficiente considerare H ◦ (k × IdI ) ed h ◦ H , per esercizio).
Esercizio 1.4. Provare, utilizzando la (1.3), che dati dei morfismi
X
f
−→
−→
g
seguente:
f ∼A g ,
h ∼B t
=⇒
h◦f
∼A∩f −1 (B) t ◦ g
Y
h
−→
−→
Z , vale l’implicazione
t
(n.b.: A ∩ f −1 (B) = A ∩ g −1 (B))
Dedurre che, in particolare, la composizione di funzioni è ben definita a livello di classi d’omotopia relativa al
vuoto.
Def. 1.5. Due spazi topologici X ed Y si dicono omotopicamente equivalenti se
h ◦ f ∼∅ IdX (identità su X)
f
h
∃ X −→ Y e Y −→ X tali che
f ◦ h ∼∅ IdY (identità su Y )
In questo caso diremo che f , come pure h, è un’equivalenza omotopica .
Def. 1.6. Uno spazio omotopicamente equivalente ad un punto si dice contraibile .
Dati X non vuoto ed Y = {p} (spazio costituito da un solo punto), si ha π ◦ j = IdY (π denota la
proiezione X → {p} e j : {p} → X una qualsiasi funzione). D’altro canto j ◦ π è una funzione costante. Di
conseguenza, uno spazio contraibile è uno spazio per il quale l’identità è omotopa ad una funzione costante:
IdX ∼∅ j ◦ π = “costante”.
Esercizio 1.7. Provare che gli spazi che seguono sono contraibili:
• X sottospazio stellato di Rn (n.b.: in particolare, Rn ed i suoi sottospazi convessi sono contraibili);
• X = “cono su uno spazio W ” (def. §0, 2.6).
(Scrivere esplicitamente un’omotopia H : X × I −→ X della funzione identica con una funzione costante).
19
Proposizione 1.8. L’equivalenza omotopica è una relazione d’equivalenza.
Dimostrazione. Se X è omotopicamente equivalente ad Y ed Y è omotopicamente equivalente a Z, i.e.
assumendo di avere funzioni ed omotopie
X
f
−→
←−
Y,
h
h ◦ f ∼∅ IdX , f ◦ h ∼∅ IdY ,
Y
g
−→
←−
k
Z,
k ◦ g ∼∅ IdY , g ◦ k ∼∅ IdZ ,
applicando la (1.3), o se si preferisce la parte finale dell’esercizio (1.4), si ottiene
X
g◦f
−−−→
←−
−−
h◦k
Z,
h ◦ k ◦ g ◦ f ∼∅ h ◦ IdY ◦ f ∼∅ IdX ,
g ◦ f ◦ h ◦ k ∼∅ g ◦ IdY ◦ k ∼∅ IdZ .
Inciso 1.9. Raccogliamo alcune conseguenze delle definizioni
• Spazi omeomorfi sono omotopicamente equivalenti. Infatti, se f è un omeomorfismo, si ha
f −1 ◦ f = IdX e f ◦ f −1 = IdY .
• Se h è un’inversa omotopica sinistra di f (i.e. h ◦ f ∼∅ IdX ) ed h′ una destra (i.e. f ◦ h′ ∼∅ IdY ), per
la (1.3) abbiamo
h = h ◦ IdY ∼∅ h ◦ f ◦ h′ ∼∅ IdX ◦ h′ = h′
=⇒ h′ ◦ f ∼∅ h ◦ f ∼∅ IdX e f ◦ h ∼∅ f ◦ h′ ∼∅ IdY .
In altri termini, se esistono sia inverse destre che inverse sinistre, allora coincidono le une con le altre.
• Naturalmente, l’esistenza di un’inversa omotopica sinistra non implica l’esistenza di un’inversa omotopica
destra (e viceversa). Ad esempio, l’inclusione di un punto in uno spazio ha certamente un’inversa sinistra
(la proiezione su quel punto) sebbene, in generale, non abbia un’inversa omotopica destra (questo è il caso
del cerchio S 1 dove, come vedremo, l’identità non è omotopa ad una funzione costante).
Deformazioni e Retratti.
Le definizioni discusse in questa sezione concernono l’eventualità che uno spazio possa essere in un qualche
senso equivalente ad un suo sottospazio. Dunque, siano X uno spazio topologico, A ⊆ X un sottospazio
ed i : A ֒→ X l’inclusione. Ci si può interrogare circa l’esistenza di una funzione r : X → A per la
quale risulti r ◦ i = IdA , ovvero circa l’esistenza di un’inversa a sinistra dell’inclusione. In questo caso si
va da A ad A passando X, ottenendo l’identità su A, ed è naturale aspettarsi che il passaggio per X non
faccia perdere la ricchezza topologica di A. Un’inversa destra non può esistere (eccetto che nel caso banale
dove X = A), però ci si può interrogare circa l’esistenza omotopica di una tale inversa destra. In questo caso,
la composizione i ◦ r : X → A ֒→ X è una funzione che va da X ad X passando per A; l’esistenza di
un’omotopia di i ◦ r ∼∅ IdX ci dirà che le proprietà omotopiche di X non si perdono passando per A.
Prima di procedere indichiamo qual è la logica della terminologia che stiamo per introdurre. Premesso che
il soggetto è l’inclusione i : A ֒→ X , un’inversa sinistra viene chiamata retrazione, per le retrazioni si usa
l’aggettivo debole in ambito omotopico; si usa il termine deformazione sostanzialmente associato ad un’inversa
omotopica destra (cfr. def. 2.1 e successivo commento), per le inverse omotopiche si usa l’aggettivo forte se le
omotopie sono relative al sottospazio A.
Def. 2.1. Una deformazione di uno spazio X è un’omotopia della funzione identica con
un’altra funzione, i.e. è una funzione
D : X × I −→ X D|X×{0} = IdX (identità su X).
In questo caso,
se Im D|D×{1} ⊆ A (sottospazio di X), diciamo che X si deforma ad A.
Nota. Data una deformazione D di X, vista la definizione (1) si ha
IdX ∼∅ d , dove d : X → X è definita ponendo d(x) = D(x, 1), ∀ x ∈ X.
Se A è un sottospazio di X contenente Im d, possiamo vedere d come funzione δ : X → A, funzione
che risulta essere un inverso omotopico destro dell’inclusione i : A ֒→ X (la stessa D è un’omotopia
IdX ∼∅ d = i ◦ δ ). Naturalmente vale anche il “viceversa”: dato A ⊆ X ed un inverso omotopico destro
dell’inclusione i : A ֒→ X , i.e. una funzione δ : X → A soddisfacente la condizione i ◦ δ ∼∅ IdX , esiste
un’omotopia D come nella definizione (2.1). Ribadiamo quanto appena osservato:
20
Fissato A ⊆ X ,
(2.2)
X si deforma ad A
⇐⇒
∃ δ : X −→ A IdX ∼∅ i ◦ δ
(i.e. esiste un’inversa omotopica destra dell’inclusione)
Alla funzione δ non si dà un nome, si preferisce riservare il termine “deformazione” all’omotopia, cioè alla D.
Osservazione 2.3. Se A è costituito da un solo punto, dire che X si deforma ad A equivale a dire che X
è contraibile (cfr. def. 1.6 e successivo commento).
Esempio. Come già menzionato al termine dell’inciso (1.9), il cerchio S 1 non si deforma ad alcuno dei suoi
punti (sebbene, come ogni spazio non vuoto, si retragga ad un suo punto arbitrariamente scelto, cfr. def. 2.5).
Esempio. Il disco D2 , in quanto contraibile (cfr. esercizio 1.7), si deforma ad ogni suo punto. Pertanto, si
deforma ad ogni suo sottoinsieme non vuoto (ma, ad esempio, pur deformandovisi, non si retrae ad S 1 ).
Def. Siano X uno spazio topologico, A ⊆ X un sottospazio, i : A ֒→ X l’inclusione.
(2.4) Una retrazione debole di X su A è una funzione r : X −→ A r ◦ i ∼∅ IdA
(i.e., è un’inversa omotopica sinistra dell’inclusione);
(2.5) Una retrazione di X su A è una funzione r : X −→ A r ◦ i = IdA
(i.e., è un’inversa sinistra dell’inclusione).
Esercizio. Provare che uno spazio topologico connesso non si retrae, neanche in modo debole, ad alcun
sottospazio non connesso. Si provi inoltre quanto segue: dato A ⊆ X, se r : X → A è una retrazione
debole, allora r(p) deve appartenere alla stessa componente connessa per archi di p in A, per ogni p ∈ A
(sottolineiamo che ciò debba necessariamente valere esclusivamente per i punti di A).
Mettendo insieme le nozioni di retrazione debole e retrazione con la nozione di deformazione
si ottengono le nozioni che seguono:
Def. Siano X uno spazio topologico, A ⊆ X un sottospazio, i : A ֒→ X l’inclusione.
(2.6) Una retrazione di deformazione debole (r.d.d.) di X su A è una funzione
r ◦ i ∼∅ IdA e i ◦ r ∼∅ IdX
r : X −→ A
(i.e., è un’inversa omotopica dell’inclusione).
Si osservi che se esiste una tale r, allora r : X → A ed i : A ֒→ X sono equivalenze omotopiche, l’una
l’inversa dell’altra.
(2.7) Una retrazione di deformazione forte (r.d.f.) di X su A è una funzione
r : X −→ A
r ◦ i ∼A IdA e i ◦ r ∼A IdX
(i.e. vale “=”)
Incidentalmente, la prima condizione segue dalla seconda (essendo quest’ultima un’omotopia relativa ad A, si
deve avere r(a) = i◦r(a) = IdX(a) = a, ∀ a ∈ A). Sebbene fosse una condizione ridondante, abbiamo voluta
scriverla ugualmente per sottolineare già nell’enunciato in bell’evidenza che una retrazione di deformazione forte
è un’inversa omotopica (sinistra e destra, dell’inclusione) che fissa A. Osserviamo che, in termini più sofisticati,
la nostra r è un’inversa dell’inclusione nella categoria degli spazi topologici contenenti A ed omotopie che
fissano A.
Nota. Quanto sopra spiega perché non abbiamo dato la versione “forte” della definizione (2.1): un’inversa
omotopica destra che fissa A, i.e. una funzione r : X → A soddisfacente r ◦ i ∼A IdX (che in accordo con
la terminologia usata si avrebbe voglia di chiamare “d.f.”), è automaticamente una r.d.f..
21
Inoltre, diciamo che A è un retratto debole , ovvero retratto , ovvero retratto di deformazione
debole , ovvero retratto di deformazione forte , di X , se esiste una funzione r come nella (2.4),
ovvero come nella (2.5), ovvero come nella (2.6), ovvero come nella (2.7) ( n.b. “r.d. forte
=⇒ r.d. debole”).
Osservazione 2.8. Dato A ⊆ X, alla luce delle definizioni date, abbiamo quanto segue:
i)
A è un retratto di deformazione debole di X
⇐⇒
(i.e. esiste r come nella 2.6)
l’inclusione i : A ֒→ X è un’equivalenza omotopica
(sottolineiamo che nelle ipotesi della prima riga, la retrazione di deformazione debole r è un’inversa omotopica
dell’inclusione i, per cui i ed r sono equivalenze omotopiche);
ii) A è un retratto di deformazione forte di X (i.e. esiste r come nella 2.7)
⇐⇒ ∃ F : X × I → X F |X×{0} = IdX , F (X × {1}) ⊆ A, F |A×{t} = IdA , ∀ t
(le uguaglianze F |X×{0} = IdX e F |A×{t} = IdA si intendono modulo le ovvie identificazioni X × {0} ∼
= X
e A × {t} ∼
= A).
Esempio. Chi ha svolto l’esercizio (1.7) presumibilmente ha scritto una retrazione di deformazione forte, i.e.
un’omotopia IdX ∼{o} o (o denota un punto in X, o la funzione costante x 7→ o). Nel caso del cono su
uno spazio W , come punto o sarà stato necessario scegliere il vertice del cono (cfr. esempio 2.11).
Avvertenza 2.9. Cosı̀ come fanno diversi autori (cfr. [Hat] e [Mas]), per brevità ometteremo il termine
“forte”: useremo la locuzione “retrazione di deformazione” pur in presenza di una “r.d.forte”. Alcuni autori
(cfr. [Vas]), usano una terminologia differente, per loro una r.d. è una r.d. debole. In [Sp], oltre alle r.d. forti
e deboli, vengono definite le r.d. tramite una proprietà intermedia, precisamente come retrazioni (def. 2.5) che
sono deformazioni (def. 2.1):
una “r.d.” è una retrazione r : X −→ A
(quindi si avrà r ◦ i = IdA e i ◦ r ∼∅ IdX ).
soddisfacente i ◦ r
∼∅
IdX
Naturalmente ci si può sbizzarrire, un’altra proprietà intermedia usata frequentemente è la seguente:
una “r.d.2” è una funzione
r : X → A ∃ F : X × I → X , F |X×{0} = IdX , F |X×{1} = i ◦ r, F (A × I) ⊆ A
(una tale F è una deformazione di X ad A che si restringe ad una deformazione di A e, per questa ragione,
si restringe automaticamente ad una retrazione debole di X su A ).
Le r.d.f. sono r.d.2 e r.d., a loro volta le r.d.2 e le r.d. sono r.d.d.. In particolare, le esistenze dei vari tipi di
r.d. si collocano nel diagramma seguente
∃ r.d.f. =⇒ ∃ r.d.
(♣)
⇓
⇓
∃ r.d.2. =⇒ ∃ r.d.d.
Se A = {p} è un punto le due frecce verticali si invertono, o meglio, si ha quanto segue:
A = {p}
=⇒ una r.d.2 è una r.d.f., una r.d.d. è una r.d. (per esercizio).
In generale, nessuna delle implicazioni indicate nel diagramma (♣) si inverte:
Esempio 2.10 (cfr. [Sp] esempi 7 ed 8, pag. 30). Il pettine del topologo è definito come il sottospazio di R2
seguente
P
:=
[0, 1] × {0} ∪ ([0, 1] ∩ Q) × [0, 1]
“base”
“denti”
• Ogni punto della base è un r.d.f. del pettine (valgono tutte le condizioni del diagramma (♣)).
• Per X = P ed A = {p} , se p non appartiene alla base valgono le due condizioni a destra, ma non le
due a sinistra.
• Per X = R2 ed A = P , valgono le due condizioni in basso, ma non le due in alto.
22
Esempio 2.11. Una versione alternativa del pettine del topologo è data dal cono su Q. In questo caso, esiste
una retrazione di deformazione forte sul vertice (come per ogni cono), ma non su alcun altro punto.
Molte affermazioni che per quanto siano “intuitivamente evidenti” sono tutt’altro che banali, seguono in modo
rigoroso come applicazione immediata della teoria dell’omotopia, come pure dell’omologia. Vediamone alcune.
• non esistono retrazioni (neanche deboli) r : D2 → S 1 (idem da Dn a S n−1 );
• il cerchio S 1 non si deforma ad alcun sottoinsieme proprio (idem per la sfera S 2 nonché in dimensione
superiore);
• se un aperto di Rn è omeomorfo ad un aperto di Rm allora si deve avere n = m (ciononostante, per citare
un risultato controintuitivo, esistono funzioni continue suriettive R → Rn , I → Dn e I → S n , ∀ n);
Gruppo Fondamentale.
Def. 3. Sia X uno spazio topologico. Una funzione continua γ : I −→ X si chiama
cammino . Il prodotto di due cammini γ1 e γ2 soddisfacenti γ1 (1) = γ2 (0) si definisce
ponendo
γ1 (2t) ,
t ≤ 12
(γ1 ∗ γ2 )(t) =
γ2 (2t − 1), t > 12
(la condizione γ1 (1) = γ2 (0) garantisce la continuità del prodotto γ1 ∗ γ2 che pertanto è anch’esso un
cammino). I punti γ(0) e γ(1) di un cammino γ si chiamano rispettivamente estremo iniziale ed estremo
finale. Nella definizione, richiedendo l’uguaglianza γ1 (1) = γ2 (0) si chiede che l’estremo finale di γ1 coincida
con l’estremo iniziale di γ2 .
Avvertenza. Considerando prodotti di cammini assumeremo sempre, pur senza farne menzione esplicita,
l’ipotesi che siano definiti, cioè che in ogni prodotto l’estremo finale del primo cammino coincida con l’estremo
iniziale del secondo.
(3.1) il prodotto γ1 ∗ γ2 non è altro che “γ1 seguito da γ2 ” (percorsi a “velocità doppia”);
(3.2) il prodotto di cammini non è associativo, naturalmente lo diventa se si considerano cammini modulo
riparametrizzazioni dell’intervallo I , cioè modulo l’equivalenza che identifica γ con γ ◦ r, essendo
r : I → I un omeomorfismo soddisfacente r(0) = 0, r(1) = 1.
Convenzione 3.3. L’omotopia di cammini si intende sempre relativa all’insieme {0, 1} (non si richiede
che gli estremi iniziale e finale coincidano); in effetti sarebbe di scarsa utilità considerare cammini modulo
omotopia rispetto al vuoto o ad uno solo degli estremi in quanto tali omotopie risulterebbero banali (cammini
che condividono un estremo sono omotopi rispetto a quell’estremo, cammini in una stessa componente connessa
per archi sono omotopi rispetto al vuoto!)
(3.4) L’omotopia di cammini (cfr. convenzione 3.3) definisce una relazione d’equivalenza sull’insieme di tutti
i cammini;
(3.5) il prodotto di cammini ∗ è compatibile con l’omotopia: se si sostituisce γ1 con un cammino ad esso
omotopo, idem per γ2 , la classe di omotopia di γ1 ∗ γ2 non cambia (come facile esercizio, si verifichi
quanto affermato);
(3.6) l’omotopia di cammini è una relazione d’equivalenza più forte della riparametrizzazione: i cammini γ e
γ ◦ r della nota (3.2) sono omotopi. Infatti, un’omotopia di γ con γ ◦ r si ottiene da un’omotopia H
di r con l’identità (se ne scriva una esplicitamente per esercizio) semplicemente scrivendo H(γ(s), t).
(3.7) il prodotto di cammini modulo omotopia ha senso ed è associativo (che abbia senso segue dalla (3.5), le
proprietà (3.2) e (3.6) ci dicono che è associativo).
Convenzione 3.8. Spesso è utile fissare un rappresentante “canonico” per la classe di omotopia di un
prodotto: con il prodotto di cammini γ1 ∗ ... ∗ γk (l’espressione indicata non ha senso come prodotto di
cammini a meno di disporre opportunamente delle parentesi), si intende il rappresentante che segue: posto
ti := ki , definiamo γ come il cammino il cui tratto nell’intervallo [ti−1 , ti ] è γi percorso a velocità k (è
chiaro cosa si intende, cfr. def. 3 e nota 3.1).
23
Def. 4. Dati X (spazio topologico) ed x0 ∈ X si definisce gruppo fondamentale π1 (X, x0 )
il gruppo dei cammini aventi estremi iniziale e finale x0 , modulo omotopia che fissa gli estremi:
γ
I −→ X γ(0) = γ(1) = x0
π1 (X, x0 ) :=
omotopia relativa a {0, 1}
dove il prodotto, per definizione, è il prodotto indotto dal prodotto di cammini.
(4.1) Il prodotto di cammini è ben definito su π1 (X, x0 ) ed è associativo (infatti, l’osservazione (3.7) si
applica, in particolare, ai cammini con estremi x0 ). L’elemento neutro è la classe del cammino costante
x0 (t) = x0 (che denoteremo con x0 ) e l’inverso della classe d’equivalenza del cammino γ è la classe
del cammino γ − , essendo γ − (t) := γ(1 − t).
(4.2) Per abuso di notazione, useremo il termine “cammino” intendendo “classe d’omotopia del cammino”.
(4.3) Il gruppo fondamentale viene anche chiamato primo gruppo d’omotopia.
(4.4) Il gruppo π1 (X, x0 ) “vede” solo la componente connessa per archi di X contenente x0 . D’altro canto,
assumendo che X sia connesso per archi, la scelta di x0 è, in un certo senso, irrilevante: dato un
altro punto x
e0 ed un cammino α da x0 a x
e0 , si ha che il morfismo π1 (X, x0 ) −→ π1 (X, x
e0 ) ,
γ 7→ α− ∗ γ ∗ α è un isomorfismo di gruppi (l’inverso è il morfismo γ
e 7→ α ∗ γ
e ∗ α− ).
Def. 4.5. Uno spazio topologico X si dice
semplicemente connesso se è connesso per archi e risulta π1 (X, x0 ) = 0
(per la nota (4.4) la nozione di semplice connessione non dipende dalla scelta del punto x0 ).
Convenzione 4.6. A volte specificare qual è il punto x0 , detto punto base, appesantisce il discorso. Per
evitare ciò si usa scrivere π1 (X) quando la scelta del punto base è ininfluente.
Esercizio 4.7. Sia P ⊆ R2 un poligono. Verificare che il “perimetro” γ percorso a partire da uno dei vertici
v di P (lo si definisca formalmente) è omotopo al cammino costante v(t) = v. Dedurre che se f : P → X
è una funzione continua, allora il cammino f ◦ γ è omotopo al cammino costante f (v).
Suggerimento: la seconda parte dell’esercizio segue dalla prima e dalla (1.3).
Nota: secondo la definizione che segue, il cammino f ◦ γ è il cammino f⋆ (γ).
Def. 5. Data una funzione f : X −→ Y ed un punto x0 ∈ X, il morfismo di gruppi
f⋆ : π1 (X, x0 ) −−−→ π1 (Y, y 0 )
7→
γ
(y0 := f (x0 ))
f ◦γ
viene chiamato morfismo indotto sui gruppi d’omotopia .
(5.1) Il fatto che la definizione risulti ben posta segue dal fatto che se H è un’omotopia di due cammini γ e
γ ′ , allora la composizione f ◦ H è un’omotopia dei cammini f ◦ γ e f ◦ γ ′ (cfr. 1.3).
(5.2) la compatibilità di f⋆ col prodotto (3) e con l’inverso (cfr. 4.1), cioè la proprietà
f⋆ (γ ∗ δ)
=
(f⋆ γ) ∗ (f⋆ δ) ,
f⋆ (γ − )
=
(f⋆ γ)− ,
∀ γ, δ ,
vale addirittura per i cammini (per esercizio), oltre che per le classi d’omotopia.
f
g
Funtorialità. Dalla definizione segue che date due funzioni continue X −→ Y e Y −→ Z
risulta
(5.3)
(g ◦ f )⋆
=
g⋆ ◦ f⋆ ,
(IdX )⋆
=
Idπ
1 (X, x0 )
(dove Id sta per “identità”).
Queste due proprietà ci dicono che i morfismi indotti in omotopia sono funtoriali: il gruppo fondamentale π1
è un funtore covariante dalla categoria degli spazi topologici puntati alla categoria dei gruppi (tutto ciò è
poco più di un modo complicato per dire che ad ogni spazio topologico puntato viene associato un gruppo,
24
il gruppo fondamentale, e che c’è una legge soddisfacente la (5.3) che a morfismi di spazi topologici puntati
associa morfismi di gruppi). Naturalmente, con la locuzione “spazio topologico puntato” si intende indicare
una coppia “spazio topologico, punto” (X, x0 ), un morfismo di spazi topologici puntati f : (X, x0 ) → (Y, y0 )
è una funzione continua f : X → Y soddisfacente f (x0 ) = (y0 ).
La proposizione (6) che segue ci dice che tale funtore si fattorizza attraverso la categoria degli spazi topologici
puntati modulo omotopia che fissa il punto. Prima vediamo un’applicazione della funtorialità.
Esercizio 5.4. Provare che se r : X → A è una retrazione, allora
i⋆ : π1 (A, x0 ) −→ π1 (X, x0 ) è iniettiva,
r⋆ : π1 (X, x0 ) −→ π1 (A, x0 ) è suriettiva
(x0 ∈ A ⊆ X, i : A → X denota l’inclusione) e che se r : X → A è una retrazione di deformazione, allora
i⋆ e r⋆ sono isomorfismi (l’uno l’inverso dell’altro).
Suggerimento: si applichi la funtorialità alla composizione r ◦ i = IdA e, per quel che riguarda la parte finale
dell’esercizio, alla composizione i ◦ r ∼ IdX (qui si usi la Proposizione 6 bis enunciata sotto).
Esercizio 5.5. Siano S 1 e D2 rispettivamente il cerchio unitario ed il disco di dimensione 2. Fissiamo
come punto base il punto o = (1, 0) (questa scelta serve solo a fissare le notazioni, nella sostanza è irrilevante,
cfr. nota 4.4 e convenzione 4.6).
• Provare che il cammino I : I → S 1 , t 7→ (cos 2πt, sin 2πt) non è omotopicamente banale;
• provare che risulta π1 (D2, o) = 0; dedurre che non esistono retrazioni π : D2 → S 1 .
La prima parte dell’esercizio, utilizzando gli strumenti a disposizione ora non è affatto facile. Comunque, è
utile cimentarsi nel problema.
Suggerimento: si ragioni per assurdo, un’omotopia I ∼{0, 1} o è una funzione H : I × I −→ S 1 che soddisfa
le proprietà della definizione (1). Al cammino hs , dove hs (t) := H(t, s) (si osservi che hs è un cammino a
valori in S 1 , avente estremi iniziale e finale uguali) si può associare un intero #hs che indichi “il numero di
giri che si fanno su S 1 ” (questo va definito formalmente, indichiamo un modo possibile: si scelgano tre punti
distinti o, x, y ∈ S 1 , quindi si definisca una parola associata ad hs utilizzando le volte che hs passa per i
tre punti, cassando le ripetizioni si otterrà una parola finita per ragioni di compattezza di I , per intenderci,
si otterrà qualcosa del tipo “oxyxoyxyxyxyxoyxyoxo”; si usi questa parola per definire #hs . Lasciamo al
lettore il compito di scrivere in modo rigoroso quanto indicato sommariamente e di fare le verifiche del caso).
A questo punto la strada è in discesa: è sufficiente provare che l’intero #hs è localmente costante (come
funzione del parametro s) e che risulta #I = 1, #o = 0.
Nota 5.5′ . Un’eventuale omotopia H come nel suggerimento, induce una funzione H ′ : S 1 × I −→ S 1 che
su una base del cilindro S 1 × I è la funzione identica e sull’altra è una funzione costante. L’argomento visto
sopra di fatto ci dice che una tale funzione non può esistere.
In effetti, come vedremo utilizzando la teoria dei rivestimenti, si ha quanto segue:
cammino I ne è un generatore.
π1 (S 1 , o) ∼
= Z ed il
Proposizione 6. Due funzioni f , f ′ : X −→ Y omotope relativamente ad x0 inducono
lo stesso morfismo in omotopia.
Come nel caso della nota (4.4) il ruolo del punto x0 è marginale:
Proposizione 6 bis. Due funzioni f , f ′ : X −→ Y omotope relativamente al vuoto
inducono in omotopia morfismi coniugati. Più precisamente, se H è l’omotopia di f e f ′ ,
posto α(t) = H(x0 , t), y0 = f (x0 ) , y0′ = f ′ (x0 ) , c’è un diagramma commutativo
π1 (X, x0 )
f⋆ ւ
π1 (Y, y0 )
σ
ց
≃
−−−→
7→
f⋆′
π1 (Y, y0′ )
α− ∗ σ ∗ α
(n.b. α va da y0 a y0′ )
Detto in termini euristici, “i morfismi f⋆ e f⋆′ sono sostanzialmente lo stesso morfismo di gruppi”.
25
Dimostrazione. Alla luce della nota (4.4), è sufficiente provare che il diagramma commuta, cioè che dato
ρ ∈ π1 (X, x0 ) e posto σ = f⋆ ρ si ha che i cammini f⋆′ ρ e α− ∗ σ ∗ α sono omotopi. A tal fine si consideri
la composizione
Q : I × I −−−→ X × I −−−→
Y
f⋆′ ρ
(t, s)
7→
(ρ(t), s)
7→ H(ρ(t), s)
α−
α
σ
Tramite tale composizione, ai quattro lati I × {0}, I × {1}, {0} × I, {1} × I del
quadrato I × I (il dominio di Q) corrispondono i cammini indicati in figura. Poiché
Q è continua, il “lato” f⋆′ ρ è omotopo al percorso α− ∗ σ ∗ α (per esercizio, si scriva
esplicitamente un’omotopia; cfr. esercizio 4.7).
Nota. La Proposizione (6 bis) generalizza la Proposizione (6). Infatti, nelle ipotesi della Proposizione (6),
se H è un’omotopia relativa ad {x0 }, allora α(t) è il cammino costante x0 (che nel gruppo fondamentale
rappresenta l’identità) e, per la (6 bis), si ha l’uguaglianza f⋆ = f⋆′ .
Come conseguenza si deduce che spazi topologici omotopicamente equivalenti hanno lo stesso gruppo fondamentale, più precisamente vale il corollario che segue.
Corollario 7. Sia f : X −→ Y un’equivalenza omotopica, x0 ∈ X, y0 = f (x0 ). Allora
il morfismo indotto in omotopia
f⋆ : π1 (X, x0 ) −→ π1 (Y, y0 )
è un isomorfismo.
La dimostrazione non è difficile, la lasciamo per esercizio. Suggerimento: dalla Proposizione (6 bis) segue che
un morfismo di uno spazio topologico in se, omotopo all’identità, induce un isomorfismo in omotopia.
26
Il teorema di Seifert e Van Kampen.
Sia X uno spazio topologico, U un suo sottospazio, ed x0 ∈ U un punto. L’inclusione
j : U ֒→ X induce un morfismo naturale
j⋆ : π1 (U, x0 ) −→ π1 (X, x0 )
(cfr. Def. 5).
Di conseguenza, c’e un morfismo naturale definito sul prodotto libero dei gruppi fondamentali di più sottospazi,
tutti contenenti il punto x0 , a valori nel gruppo fondamentale π1 (X, x0 ) (ciò segue dalla proprietà universale
del prodotto libero di gruppi §A1, 10). Il teorema di Seifert-Van Kampen ci dice sotto quali ipotesi questo
morfismo è suriettivo e, in questo caso, qual è il suo nucleo. Nelle applicazioni si usano frequentemente due
casi particolari, le affermazioni (9.1) e (9.2), che quindi poniamo in risalto. La dimostrazione del Teorema
viene data più avanti, dopo la generalizzazione (11).
Teorema 8 (di Seifert-Van Kampen). Sia X uno spazio topologico, U e V due suoi
aperti che lo ricoprono la cui intersezione è connessa per archi, sia inoltre x0 ∈ U ∩ V un
punto, cioè:
(♣)
X
U ∪V ,
=
U ∩ V è connesso per archi ,
x0 ∈ U ∩ V .
Allora il morfismo canonico
(8.1)
Φ :
π1 (U, x0 ) ⋆ π1 (V, x0 )
−−−→
π1 (X, x0 )
γ1 · ... · γk
7→
γ1 ∗ ... ∗ γk
è un morfismo suriettivo di gruppi. Inoltre, il nucleo del morfismo Φ è costituito dal sottogruppo
(8.2)
ker Φ =
γU · γV− γ ∈ π (U ∩V, x )
1
0
dove: “⋆” denota il prodotto libero di gruppi (def. §A1, 7); ogni γi denota un cammino in uno dei due
aperti e, per abuso di notazione, anche la sua immagine in X tramite il morfismo indotto dall’inclusione
(Def. 5); “∗” denota il prodotto di cammini (def. 3); la notazione a destra della (8.2) indica il sottogruppo
normale generato dalle parole del tipo γU · γV− , essendo γU l’immagine nel gruppo π1 (U, x0 ) di un cammino
γ ∈ π1 (U ∩ V, x0 ) e γV− l’immagine in π1 (V, x0 ) del cammino γ −1 ∈ π1 (U ∩ V, x0 ).
Nota 8.3. Il fatto che Φ sia ben definita nonché un morfismo di gruppi segue dalla proprietà universale del
prodotto libero di gruppi. In effetti, come già accennato nell’introduzione al teorema di Seifert-Van Kampen,
avremmo potuto definire Φ come il morfismo dato dalla proprietà universale del prodotto libero di gruppi
applicata ai morfismi π1 (U, x0 ) → π1 (X, x0 ) e π1 (V, x0 ) → π1 (X, x0 ) ...ma ci sembrava che introducendo
Φ in questo modo avremmo appesantito l’esposizione!
Corollario 9. Siano X , U , V , x0 ed il morfismo Φ come nel Teorema (8).
(9.1)
Se π1 (U ∩ V, x0 ) = 0 allora il morfismo canonico Φ è un isomorfismo.
(9.2)
Se π1 (U, x0 ) = 0 allora c’è un isomorfismo naturale di gruppi
Υ :
π1 (V, x0 )
Im π1 (U ∩ V, x0 )
−−−→
π1 (X, x0 )
i.e., se π1 (U, x0 ) = 0 (caso 9.2), il morfismo naturale ̟ : π1 (V, x0 ) −→ π1 (X, x0 ) è suriettivo ed il
suo nucleo coincide col sottogruppo normale generato dall’immagine del gruppo π1 (U ∩ V, x0 ) nel gruppo
π1 (V, x0 ). Naturalmente, i vari morfismi sono quelli indotti dalle corrispondenti inclusioni di spazi topologici,
cfr. Def. 5.
Esercizio 10. Si verifichi che le (9.1) e (9.2) sono casi particolari del teorema di Seifert-Van Kampen (8).
27
Torniamo al Teorema (8). La suriettività di Φ si generalizza al caso di un ricoprimento di più aperti cosı̀
com’è, quanto alla descrizione del nucleo di Φ si deve assumere l’ulteriore ipotesi che l’intersezione di ogni
terna di aperti sia connessa per archi. Enunciamo la generalizzazione:
Teorema 11. Sia X uno spazio topologico ed x0 ∈ X un punto. Se F = {Uα } è un ricoprimento aperto
di X, ogni aperto Uα contiene x0 ed ogni intersezione Uα ∩ Uβ è connessa per archi, allora
`
Φ :
π1 (Uα , x0 ) −−−→ π1 (X, x0 )
(11.1)
γ1 · ... · γk
7→
γ1 ∗ ... ∗ γk
è un morfismo suriettivo di gruppi. Assumendo che l’intersezione di ogni terna di aperti sia connessa per archi
si ha
(11.2)
ker Φ =
γU · γV− γ ∈ π (U∩V, x ), U, V ∈ F
1
0
i.e. il nucleo di Φ è costituito dal sottogruppo normale generato dalle parole del tipo γU · γV− al variare di
U e V in F.
Nota 12. Ai fini della suriettività di Φ, l’ipotesi che ogni intersezione Uα ∩ Uβ sia connessa per archi
è cruciale. Quanto ai singoli Uα , sebbene non necessario, non è restrittivo assumere che siano essi stessi
connessi per archi (ed in effetti molti testi assumono quest’ipotesi). Infatti, le eventuali componenti Z di Uα
come nell’esercizio (12.1) sotto non sono “viste” da nessuno dei gruppi che compaiono nella (11.1).
Esercizio 12.1. Assumendo le ipotesi richieste ai fini della suriettività del morfismo (11.1), verificare che ogni
componente connessa per archi Z di un aperto Uα , con x0 6∈ Z , ha intersezione vuota con ogni Uβ (per
β 6= α) e, pertanto, è una componente connessa per archi di X (distinta da quella contenente il punto x0 ).
Si noti che, in particolare, sempre assumendo le ipotesi menzionate, lo spazio X è connesso per archi se e solo
se ogni aperto Uα è connesso per archi.
Avvertenza 13. Quanto al nucleo di Φ, l’ipotesi che l’intersezione di ogni terna di aperti sia connessa per
archi è necessaria. Inoltre, se non la si assume, non è affatto possibile descrivere il gruppo π1 (X, x0 ) in termini
dei vari morfismi associati al ricoprimento: è possibile dare esempi X = U ∪ V ∪ W e X ′ = U ′ ∪ V ′ ∪ W ′
soddisfacenti tutte le altre ipotesi nonché aventi i diagrammi Ξ(X) e Ξ(X ′ ) isomorfi, pur essendo π1 (X, x0 )
e π1 (X ′ , x′0 ) non isomorfi! Dove
π1 (U ∩ V, x0 ) −→ π1 (U, x0 )
Ξ(X) :
ր
ց
ր
ց
π1 (U ∩ V ∩ W, x0 ) −→ π1 (U ∩ W, x0 )
π1 (V, x0 ) −→ π1 (V, x0 )⋆π1 (V, x0 )⋆π1 (V, x0 )
ց
ր
ց
ր
π1 (V ∩ W, x0 ) −→ π1 (W, x0 )
(idem per Ξ(X ′ )). Dire che i diagrammi Ξ(X) e Ξ(X ′ ) sono isomorfi significa dire che sono “identificabili”:
ogni gruppo del primo diagramma è isomorfo al corrispondente gruppo del secondo diagramma ed anche i vari
morfismi si corrispondono.
La dimostrazione del Teorema di Seifert-Van Kampen per un ricoprimento costituito da due soli aperti (Thm. 8)
è sostanzialmente identica a quella della sua generalizzazione al caso di un ricoprimento aperto arbitrario
(Thm. 11). Dimostriamo quest’ultima.
Dimostrazione (del teorema di Seifert-Van Kampen 11). Per prima cosa, proviamo la suriettività di Φ.
Step 1. Dato un cammino γ : I → X che rappresenta una classe nel gruppo d’omotopia π1 (X, x0 ) , si ha
che esistono dei punti t0 = 0, t1 , ..., tk−1 , tk = 1 tali che ogni tratto γ([ti , ti+1 ]) è interamente contenuto
in uno degli aperti di F (quest’affermazione segue dal lemma di Lebesgue §0, 5).
Step 2. Per i = 1, ..., k, sia Uαi l’aperto contenente il tratto γ([ti−1 , ti ]), naturalmente γ(t0 ) = γ(tk ) = x0
e γ(ti ) ∈ Uαi ∩ Uαi+1 , per i = 1, ..., k −1. Di conseguenza risulta γ = γ1 ∗ ... ∗ γk , dove ogni γi è un
cammino nell’aperto Uαi ed i vari γi sono definiti riparametrizzando nella maniera ovvia la restrizione del
cammino γ al tratto di intervallo [ti−1 , ti ].
Step 3. A meno di sostituire γ con un cammino omotopo, possiamo assumere che i due estremi dei vari γi
siano il punto x0 : per i = 1, ..., k−1 si scelga un cammino αi in Uαi ∩Uαi+1 che collega γi (ti ) con x0 (qui è
cruciale l’ipotesi che l’intersezione dei due aperti sia connessa per archi) e si inserisca tra γi e γi+1 il cammino
αi ∗ α−
(che non muta la classe d’omotopia di γ). Questo conclude la dimostrazione della suriettività di Φ.
i
28
Ora proviamo la (11.2). Chiaramente il nucleo di Φ contiene le parole del tipo γU · γV− come nell’enunciato
e, di conseguenza, il sottogruppo normale che esse generano. Il problema è quello di provare che non contiene
nient’altro, cioè che una parola γ1 · ... · γk contenuta nel nucleo di Φ è collegabile alla parola vuota con passi
dei due tipi che seguono:
(♠) i) “come nella def. §A1, 7”
ii) “inserimento o cancellazione di espressioni del tipo γU · γV− ”.
A tale fine consideriamo una parola γ1 · ... · γk , rappresentanti per i vari γi , il prodotto di cammini γ1 ∗ ... ∗ γk
come nella convenzione (3.8) ed assumiamo che il cammino γ = γ1 ∗ ... ∗ γk sia omotopo al cammino costante
x0 . A questo punto l’idea è quella di “seguire” i vari “tratti di γ” nella loro evoluzione attraverso l’omotopia.
In dettaglio:
Step 4. Fissiamo un’omotopia H(t, s) di γ con x0 e poniamo βs (t) = H(t, s) (cosı̀ β0 = γ e β1 = x0 ).
Step 5. Consideriamo un suddivisione di I × I (dominio di H ) in rettangoli chiusi come in figura in modo
che ogni rettangolo sia contenuto nella preimmagine di uno degli aperti di F e che ogni vertice appartenga, al
più, a tre rettangoli. Per ogni rettangolo, scegliamo un aperto di F che lo contiene, che chiameremo aperto ad
esso associato. Come nello step 1, l’esistenza di una tale suddivisione segue dal Lemma di Lebesgue (§0, 5).
Step 6. Per ogni β = βtj si considera la sua suddivisione in tratti associata
ai vertici vm che incontra, il cammino β̄ ottenuto da β inserendo nei vari
β(vm ) degli αm ∗ α−
m come nello step 3 (essendo αm un cammino che collega
β(v) con x0 interamente contenuto nell’intersezione degli aperti associati ai
rettangoli di cui vm è vertice, che pertanto saranno al più tre). A tale β̄ ,
o meglio alla sua suddivisione, associamo le due parole (nel prodotto libero
in 11.1) β sup e β inf corrispondenti alle due facce di rettangoli di cui è lato.
Risulta (lasciamo la verifica per esercizio)
γ1 · ... · γk
∼ β0sup
∼ βtinf ∼ βtsup ∼ βtinf
1
1
2
∼ ... ∼ βtsup
r−1
β1
βtj
β0
γ0
...
γk
∼ βtinf
∼ x0 · ... · x0
r =1
essendo ∼ la relazione d’equivalenza, definita sull’insieme delle parole, dei passi dei due tipi considerati sopra
in (♠). Questo step naturalmente conclude la dimostrazione.
Notazione 13.1. Usiamo il simbolo “∨” per denotare la “wedge sum” (cfr. def. §0, 2.6): poniamo
S• X ∨ Y := X
Y {x0 , y0 }
(X e Y sono spazi topologici, x0 ∈ X e y0 ∈ Y sono punti che si assume siano stati fissati a priori).
Esempio 13.2. Siano (X, x0 ) e (Y, y0 ) due spazi topologici puntati “ragionevolmente buoni” r.b., dove
uno spazio puntato è r.b. se il punto base è un retratto di deformazione forte (cfr. def. 2.7) di un suo intorno
aperto opportuno17 . Dal teorema di Seifert-Van Kampen segue che il gruppo fondamentale della wedge sum
è il prodotto libero (cfr. §A1, 7) dei gruppi d’omotopia dei due spazi:
∼ π (X, x ) ⋆ π (Y, y )
(13.3)
π X ∨ Y, o
=
1
1
0
1
0
dove o = [x0 ] = [y0 ] denota la classe dei due punti che identifichiamo.
Dimostrazione. Siano UX , UY ⊆ X ∨ Y aperti per i quali esistono retrazioni di deformazione forti rispettivamente su X ed Y (UX := AY ∪ X, UY := AX ∪ Y , essendo AX ⊆ X e AY ⊆ Y gli aperti dell’ipotesi
“r.b.”). Si ha X ⊆ UX , Y ⊆ UY , l’intersezione UX ∩ UY è semplicemente connessa,
si hanno isomorfismi
naturali π1 (X, x0 ) ∼
= π1 (UX , o) ⋆ π1 (UY , o).
= π1 (UX , o) e π1 (Y, y0 ) ∼
= π1 (UY , o). Inoltre, π1 X ∨ Y, o ∼
(9.2)
Il risultato si generalizza alla wedge sum di una famiglia arbitraria di spazi topologici puntati (sempre r.b.):
il corrsispondente gruppo fondamentale è il prodotto libero dei gruppi fondamentali degli spazi in questione.
In particolare, π1 S 1 ∨ S 1 , o = Z ⋆ Z e
= Free(J)
(cfr. §A1, 2)
(13.4)
π1 ∨ S 1 , o
j∈J
(sopra abbiamo la wedge sum di una famiglia di copie del cerchio S 1 , parametrizzata da un insieme J ).
Avvertenza: se si omette l’ipotesi r.b., è possibile dare esempi dove la (13.3) non vale, persino con X ed Y
entrambi contraibili (cfr. def. 1.6), quindi semplicemente connessi (cosı̀ da avere, nella 13.3, il gruppo a sinistra
non nullo e quello a destra nullo). Non entreremo nel merito, si tenga comunque presente che, in generale, la
contraibilità di due spazi puntati non implica18 la contraibilità della loro wedge sum.
17
Quest’ipotesi è automaticamente soddisfatta dalle coppie “CW-complesso, punto” e dalla maggior parte degli spazi topologici
puntati nei quali capita di imbattersi.
18
La implica se per uno dei due spazi, l’omotopia di contrazione sul punto è forte, i.e. fissa il punto.
29
Esempio 13.5. Calcoliamo, usando il teorema di Seifert-Van Kampen, il gruppo fondamentale delle superfici
compatte. Già sappiamo che le superfici compatte possono essere viste come poligoni con i lati identificati a
coppie (cfr. classificazione §1, 10). Consieriamo dunque un tale poligono con identificazioni. Per non appesantire la notazione, omettiamo di fissare, e scrivere, il punto base (cfr. osservazione 4.4 e convenzione 4.6). Come
aperto U consideriamo la parte interna del poligono (quindi U è omeomorfo ad un disco aperto e, per questa
ragione, ha gruppo fondamentale banale), come aperto V consideriamo il complementare di un punto interno
al poligono. L’aperto V si retrae al “quoziente del perimetro del poligono” (quoziente per le identificazioni
del caso). Nei casi dell’elenco (§1, 10) il quoziente del poligono ha un solo vertice ed il gruppo d’omotopia
π1 (V ) è il gruppo d’omotopia di una wedge sum di cerchi (cfr. 13.4), nello specifico, è il gruppo libero generato dalle lettere che compaiono nella sequenza delle identificazioni (nei due casi dell’elenco, rispettivamente
λ1 , µ1 , ..., λg , µg e λ1 , ..., , λm ). Ora, usiamo il Corollario (9), formula (9.2): il gruppo π1 (V ) va quozientato
col sottogruppo normale generato dall’immagine del gruppo π1 (U ∩ V ) ∼
= Z (l’intersezione U ∩ V è una
corona circolare, quindi è omotopicamente equivalente ad S 1 ) nel gruppo π1 (V ). Questa immagine risulta
essere il sottogruppo ciclico generato dalla parola delle identificazioni (il cammino che percorre la corona U ∩V
è omotopo, come cammino in V , al perimetro del poligono). In definitiva abbiamo
(♣) π1 Cg
= Z
⋆ 2g
λ1 µ1 λ−1
µ−1
.... λg µg λ−1
µ−1
g
g
1
1
Vediamo qualche esempio più da vicino:
2
2
π1 P (R)#...#P (R)
,
µ
µ
µ2
λ
λ
λ
λ
λ
Toro
π1 (V )
ker Φ
=
Z⋆Z
∼
= Z×Z
hλ µ λ−1 µ−1 i
Z ∼
= Z2
2Z
⋆m
λ21 ... λ2m
λ2
µ1
λ1
µ2
µ
λ2
Piano Proiettivo
= Z
λ2
λ
µ
λ µ λ−1 µ−1
µ1
λ1
λ µ λµ−1
λ1 µ1 λ−1
µ−1
λ2 µ2 λ−1
µ−1
1
1
2
2
Bottiglia di Klein
C2
Z⋆Z
hλ µ λµ−1 i
hλ1 µ1 λ−1
µ−1
λ2 µ2 λ−1
µ−1
i
1
1
2
2
Z⋆Z⋆Z⋆Z
Avvertenza. Il quadrato modulo le identificazioni λµλµ è il piano proiettivo. D’altro canto il quoziente del
gruppo libero generato dalle lettere λ e µ per il sottogruppo normale generato dalla parola λµλµ, i.e. il
gruppo Z ⋆ Z/hλµλµi, non è il gruppo fondamentale del piano proiettivo! L’errore sta nel fatto che i quattro
vertici del quadrato non si identificano in un unico punto (il quoziente del quadrato ha due vertici) ed i due
cammini λ e µ non sono cammini chiusi, di conseguenza non sono generatori del gruppo π1 (V ).
La tecnica vista permette di calcolare il gruppo fondamentale di qualsiasi poligono modulo identificazioni,
anche quando i lati non sono identificati a coppie (per cui non si ha una superficie topologica). Naturalmente,
si dovrà fare attenzione a scrivere correttamente il gruppo π1 (V ) , che è sempre il gruppo fondamentale del
grafo associato alla parola che definisce le identificazioni (:= perimetro del poligono modulo identificazioni).
Proponiamo qualche esempio come esercizio.
Esercizio 13.6. Sia S(“parola”) lo spazio topologico ottenuto quozientando un poligono di n lati con la
sequenza delle identificazioni associata alla parola in questione (cfr. §1, esempio 8.3); il numero n sarà la
lunghezza della parola. Calcolare il gruppo fondamentale degli spazi topologici che seguono:
S(λ λ λ) ,
S(λ λ λ λ) ,
S(λn ) ,
S(λ λ−1 µ) ,
S(α β γ) ,
S(λ µ λ µ λ µ) ,
Risposta: rispettivamente Z3 , Z4 , Zn , 0 , 0 , Z3 (generato da λ∗µ),
generate rispettivamente da α e µ).
S(λ λ−1 α µ µ)
Z ⋆Z/hµ2 i (le due copie di Z sono
Esercizio 13.7. Sia S = S(α β α−1 γ β δ γ δ −1 ) (definizioni come sopra). Verificare che siamo nelle ipotesi
dell’esercizio (§1, 9.2), dedurre che S è una superficie topologica compatta, calcolarne il gruppo fondamentale,
stabilire di quale superficie si tratta.
Suggerimento: si usi la classificazione delle superdici compatte (§1, 10) e le formule (♣), esempio (13.5).
30
Rivestimenti.
e −→ X una funzione continua di spazi topologici.
Def. 14. Sia ̺ : X
• U ⊆ X si dice ben rivestito se ̺−1 (U) è unione disgiunta19 di sottospazi omeomorfi ad U :
S• e
(⋆)
̺−1 (U) =
Ui , ̺ | è un omeomorfismo.
ei
U
ei si chiamano fogli dell’insieme ben rivestito. La nozione di foglio è una nozione relativa: dipende
Gli U
da U e, in generale, anche dalla decomposizione (⋆) (che non è unica se U non è connesso e ̺|U non è
biunivoca; cfr. nota 14.1, ultimo punto).
e ̺) è un rivestimento di X.
• se ogni x ∈ X ha un intorno ben rivestito diciamo che (X,
e è un rivestimento di X
Per abuso di linguaggio, diremo che ̺ è un rivestimento di X , ovvero che X
(naturalmente useremo quest’ultima locuzione solo se è chiaro dal contesto chi è ̺).
ei sia disgiunta si intende che questa sia topologicamente
Nota 14.1. Con la richiesta che l’unione ∪• U
−1
e
disgiunta: ogni Ui , come sottospazio di ̺ (U ) dotato della topologia indotta, è sia aperto che chiuso. Come
conseguenza immediata, se ̺ è un rivestimento si hanno le proprietà che seguono (che diamo per esercizio):
ei è aperto in X
e;
• se U è un aperto ben rivestito, ogni U
e ∃U
e (intorno di x
e → ̺(U
e ) è un omeomorfismo;
• ̺ è un omeomorfismo locale, i.e. ∀ x
e ∈ X,
e) tale che ̺| e : U
U
•
•
•
•
̺ è aperta (cioè manda aperti in aperti);
e;
ogni fibra ̺−1 (x) è un sottospazio discreto di X
−1
la cardinalità di ̺ (x) è localmente costante (in quanto costante su ogni aperto ben rivestito);
se U è connesso, la decomposizione (⋆) è univocamente determinata.
Esempio 14.2. Se consideriamo un qualsiasi spazio non vuoto X e ne prendiamo due copie “attaccate” (cioè
con la topologia meno fine rispetto alla quale la proiezione naturale ̺ è continua), nessun sottoinsieme non
vuoto è ben rivestito per ̺, nonostante la restrizione di ̺ (che quindi non è un rivestimento) ad ognuna delle
due copie di X sia un omeomorfismo!
Esempio 14.3. Un’unione disgiunta di copie di X è un rivestimento. Un rivestimento di questo tipo è poco
interessante, si chiama rivestimento banale.
Osserviamo che, per ragioni tautologiche, ogni rivestimento è localmente banale nel senso che segue:
∀ x ∈ X, ∃ U (intorno di x) tale che la restrizione di ̺ a ̺−1 (U ) è un rivestimento banale di U .
∼ S 1 , dove
Esempio 14.4. L’esempio più elementare di rivestimento non banale è il rivestimento R → R/Z =
1
il morfismo di rivestimento è la proiezione naturale su R/Z andiamo su S tramite t 7→ (cos 2πt, sen2πt) .
(Ricordiamo che R/Z denota il quoziente di gruppi, si veda l’avvertenza §0, 2.4).
Esempio 15.1. La proiezione naturale ̺ : Rn −→ Rn Zn è un rivestimento.
Esercizio 15.2. Sia ̺ : R2 −→ R2 Z2 la proiezione naturale (cfr. esempio 15.1). Sia ℓ ⊆ R2 una retta.
Provare che la restrizione ̺|ℓ : ℓ −→ ̺(ℓ) è un rivestimento se e solo se ℓ ha pendenza razionale (se ℓ ha
pendenza irrazionale, non esistono affatto aperti di ̺(ℓ) ben rivestiti).
Consideriamo una funzione f ed un rivestimento ̺ come nel diagramma
(16)
Y
f
e
X
y ̺ (rivestimento)
−−−→ X
e soddisfacente ̺ ◦ fe = f si chiama sollevamento di f .
Def. 17. Una funzione fe : Y −→ X
Se è dato un punto y0 ∈ Y , il punto x
e0 = fe(y0 ) si chiama punto iniziale del sollevamento. Naturalmente
il punto iniziale del sollevamento appartiene alla fibra ̺−1 (x0 ), dove x0 := f (y0 ) (richiederemo implicita-
19
Per convenzione, si richiede che l’unione disgiunta sia non vuota, equivalentemente che ̺−1 (U ) sia non vuoto.
31
mente che ciò si verifichi, per convenzione, riferendoci all’eventuale assegnazione di un punto iniziale per un
sollevamento).
I risultati che seguono concernono esistenza ed unicità dei sollevamenti. Iniziamo col risultato più evidente:
l’unicità del sollevamento con punto iniziale assegnato.
Lemma 18. Dati f e ̺ come nel diagramma (16) e dato y0 ∈ Y , se Y è connesso si ha
che esiste al più un sollevamento
e
fe : Y −→ X
con punto iniziale assegnato.
e che coincidono in un punto,
In altri termini, nelle ipotesi del Lemma, due sollevamenti fe, fe′ : Y −→ X
necessariamente coincidono ovunque.
e due sollevamenti di f . Dato y ∈ Y , fissiamo un intorno aperto ben
Dimostrazione. Siano fe, fe′ : Y −→ X
S• e
ei sono aperti di X).
e Se
rivestito U di x = f (y), quindi scriviamo ̺−1 (U ) =
Ui (per la nota 14.1, tali U
−1
′
−1
ej ) ∩ fe′ (U
ej ′ ) è un aperto
ej ed U
ej ′ sono i fogli contenenti rispettivamente fe(y) e fe (y), allora V := fe (U
U
′
e
e
e
e
soddisfacente la proprietà che segue: f (V ) ⊆ Uj , f (V ) ⊆ Uj ′ . Essendo questi due aperti omeomorfi ad U
via ̺, e poiché ̺ ◦ fe = ̺ ◦ fe′ , si ha la seguente dicotomia: o fe ed fe′ coincidono in V (se j = j ′ ), oppure
non hanno alcun punto in comune in V (se j 6= j ′ ). Ne segue che l’insieme dove i due sollevamenti fe ed fe′
coincidono è sia aperto che chiuso. Essendo lo spazio Y connesso per ipotesi, si ha la tesi: due sollevamenti
che coincidono in un punto, necessariamente coincidono ovunque.
Quanto all’esistenza del sollevamento, osserviamo che dati f e ̺ come nel diagramma (16)
e essendo il gruppo fondamentale funtoriale (cfr. formule 5.3),
ed un sollevamento fe : Y → X,
dall’uguaglianza ̺ ◦ fe = f si deduce la condizione
e e
(19)
f⋆ π1 (Y, y0 ) ⊆ ̺⋆ π1 (X,
x0 )
x0 := fe(y0 ) .
e
e
Cioè, l’inclusione (19) è una
condizione necessaria per l’esistenza di un sollevamento f con punto iniziale
assegnato x
e0 ∈ ̺−1 f (y0 ) .
Inciso 19.1. Entriamo meglio nel merito della condizione (19). Come vedremo (cfr. 22.1), un cammino
γ : I → X si solleva sempre. Se γ(0) = γ(1), è definito il corrispondente laccio γ ′ : I/{0, 1} ∼
= S1 → X
(usiamo il termine “laccio” per sottolineare il fatto di aver identificato i due estremi del dominio I). In questo
(♣)
caso, comunque, affinché si sollevi anche il laccio γ ′ , si deve avere γ
e(0) = γ
e(1) (dove γ
e denota il sollevamento
di γ). Se l’immagine f⋆ π1 (Y, y0 ) contiene un cammino γ che non soddisfa la condizione (♣), chiaramente
non sarà possibile sollevare f . L’idea è che se facciamo un giro (che immaginiamo di sollevare man mano che
lo facciamo), anche il sollevamento, affinché possa completarsi “ad un sollevamento del laccio”, deve tornare al
punto di partenza. Fin qui abbiamo solo ribadito la condizione (19), il problema è che la stessa patologia può
verificarsi pur in assenza di cammini in f⋆ π1 (Y, y0 ) non soddisfacenti (♣). Una condizione che escluda tale
patologia è anche sufficiente (cfr. Teoremi 21 e 22). L’esempio che segue chiarisce qual è il punto e suggerisce
la condizione giusta da assumere per l’esistenza del sollevamento: la connessione per archi locale.
Esempio 20. Consideriamo Y = R/Z ed Y ′′ = [0, 1). Naturalmente si tratta dello stesso identico insieme
(a meno di un’ovvia identificazione) dotato di due topologie differenti. Lo spazio Y ′′ è più ricco di aperti di
Y . Quindi consideriamo un terzo spazio topologico Y ′ : consideriamo sempre lo stesso insieme ma dotato di
una topologia che abbia più aperti di quella di Y ma meno di quella di Y ′′ (esiste, cfr. esercizio 20.1). Infine
consideriamo i tre diagrammi che seguono
R
↓ ̺
R
↓ ̺
R
↓ ̺
Y = R/Z −→ R/Z
Y ′ −→ R/Z
Y ′′ = [0, 1) −→ R/Z
f
f
f
essendo ̺ la proiezione naturale ed f l’identità (ribadiamo che, come insiemi, Y = Y ′ = Y ′′ ). Giusto per
fissare le idee, in tutti e tre i casi cerchiamo un sollevamento fe con punto iniziale fe(0) = 0 (ma la scelta del
punto iniziale è irrilevante). Nel terzo caso, dove avendo π1 (Y ′′, 0) = 0 la condizione (19) non è violata, il
32
sollevamento esiste (è la funzione fe(y) = y). Nel primo caso viene violata la condizione (19) e, di conseguenza,
non esiste alcun sollevamento; il problema è quello già descritto prima di quest’esempio: il sollevamento del
terzo caso (l’unico eventuale candidato) non funziona nel primo caso perché avvicinandoci al punto 0 = 1
dal “lato di 1” si deduce che si dovrebbe avere fe(0) = 1 (mentre fe(0) = 0).
Il secondo caso è interessante: abbiamo messo più aperti (nel passaggio da Y a Y ′ ) cosı̀ da avere gruppo
fondamentale banale come nel terzo caso, ma non ne abbiamo messi abbastanza da eliminare la patologia
riscontrata nel primo caso (anche nel secondo caso, e per la stessa ragione, il sollevamento del terzo caso
“fe(y) = y” non funziona).
Esercizio 20.1. Provare che esiste uno spazio Y ′ come nell’esempio.
Suggerimento: visto che Y r {0} e Y ′′ r {0} sono omeomorfi, la questione riguarda la topologia locale in 0,
...si consideri
S
(−∞, 0] × {0}
{(x, sin x1 )}x > 0 ⊆ R2
(che come insieme è parametrizzato da R) con la topologia indotta dal piano R2 (spazio noto come seno del
topologo).
Teorema 21. Dati f e ̺ come nel diagramma (16), e dato y0 ∈ Y , se Y è connesso per
archi e localmente connesso per archi (§0, 8.1) si ha che esiste un sollevamento
e
fe : Y −→ X
con punto iniziale e
x0
se e solo se è verificata la condizione (19). Inoltre, un tale fe è unico.
(xe0 ∈ ̺−1 (x0 = f (y0 )) )
e −→ X, un
Teorema 22. Data una funzione F : Y ×I −→ X, un rivestimento ̺ : X
sollevamento fe della restrizione f := F |Y ×{0} , si ha che
∃!
e di F che estende fe .
sollevamento F
Questo secondo Teorema, noto come Teorema del sollevamento dell’omotopia, ci dice che se due funzioni
f : Y → X e g : Y → X sono omotope ed f si solleva, allora l’omotopia si solleva (in particolare si
solleva anche g). Si osservi che la condizione (19), essendo soddisfatta da f ed essendo Y × I un retratto di
deformazione di Y × {0}, è soddisfatta anche da F .
Nella dimostrazione che segue si usa più volte, senza farne ogni volta menzione esplicita, il fatto che una
funzione tra spazi topologici è continua se e solo se è localmente continua in ogni punto (§0, 6.1).
Dimostrazione (dei Teoremi 21 e 22).
(♣)
Premettiamo un fatto ovvio.
Localmente, i sollevamenti esistono sempre: la restrizione di f (ovvero F ) ad un sottospazio
la cui immagine è ben rivestita si solleva con punto iniziale arbitrariamente scelto.
Comune ai due Teoremi, esistenza ed unicità del sollevamento di un cammino con dato punto iniziale:
e → X, un cammino γ : I → X, x
dato un rivestimento ̺ : X
e0 ∈ ̺−1 (0), si ha che
(22.1)
esiste, ed è unico, un sollevamento e
γ di γ con punto iniziale γ
e(0) = x
e0 .
Step 1. Dimostriamo (22.1). Si considerino le immagini inverse via γ degli aperti ben rivestiti di X . Per
il Lemma (§0, 5) esiste una suddivisione finita di I in intervallini chiusi ognuno dei quali è interamente
contenuto in almeno uno di tali aperti (per cui avrà immagine ben rivestita). Solleviamo le restrizioni di γ a
tali intervallini, ognuna con punto iniziale il punto finale del sollevamento del tratto precedente, ciò è possibile
per la premessa (♣). I sollevamenti dei singoli intervallini si raccordano bene (per costruzione), quindi per il
lemma di incollamento (§0, 7.2) abbiamo un sollevamento di γ . L’unicità segue dal lemma (18).
Step 2. Dimostriamo il Teorema (22). Definiamo Fe (y, t) = γ
ey (t), essendo γ
ey il sollevamento del cammino
e
γy (t) = F (y, t) con punto iniziale γ(0) = f (y) (qui usiamo esistenza ed unicità asserite nella (22.1)). La
continuità di Fe è più delicata, a priori sappiamo che Fe è continua solo come funzione di t, per y fissato
(questo perché γ
ey è continua). Proviamo che Fe è continua. Fissato un punto y ∈ Y , sia τ l’estremo
superiore dei t per i quali la restrizione Fe|U×[0, t] è continua, per un qualche intorno aperto U di y. Poiché
per ipotesi fe solleva Fe |
, si ha τ ≥ 0 . Consideriamo un intorno del punto (y, τ ) ∈ Y × I con immagine
U×{0}
33
ben rivestita, che assumiamo essere del tipo W = U ′ × (τ − ǫ, τ + ǫ) ∩ I , ǫ > 0 (gli aperti di questi tipo
costituiscono una base per la topologia prodotto). Affermiamo quanto segue:
(a) Fe è continua in U ∩ U ′ × [0, τ +ǫ) ∩ I, U intorno di y tale che Fe |U×[0, τ −ǫ′ ] è continua, ǫ′ = ǫ/2
(se τ < ǫ/2, poniamo ǫ′ = 0). L’affermazione (a), a sua volta, per ragioni di lemma di incollamento segue
dalla continuità nel “pezzettino in più”, cioè dalla proprietà
(b)
la restrizione di Fe ad Ω := U ∩ U ′ × [τ −ǫ′ , τ +ǫ) ∩ I è continua.
Quest’ultima segue da quello che sappiamo: la restrizione di Fe a U ∩ U ′ × {τ −ǫ′ } è
̺−1 F
(Ω)
̺
continua, Fe è continua come funzione di t, Fe solleva insiemisticamente F (la quale è
y
continua), nel diagramma a lato il rivestimento è banale (questo perché Ω ⊆ W , che ha
F
Ω −→ F (Ω)
immagine è ben rivestita). Cfr. esercizio (22.2) sotto.
Infine, dall’affermazione (a) segue che si deve avere τ = 1. Ciò garantisce la continuità locale di Fe in ogni
punto e conclude la dimostrazione di questo step.
Step 3. Dimostriamo che sollevamenti con stesso punto iniziale di cammini omotopi, hanno stesso punto finale
(non si richiede che i cammini da sollevare siano chiusi: l’estremo iniziale può essere diverso da quello finale).
Per il risultato precedente, l’omotopia si solleva. Essendo l’omotopia di cammini relativa agli estremi, gli
estremi iniziale e finale dei cammini dell’omotopia sono costanti. Ne segue la tesi.
Step 4. Dimostriamo il Teorema (21). Per ogni punto y ∈ Y , si scelga un cammino γ = γy da y0 a y ,
quindi si sollevi il cammino f ◦ γ con punto iniziale x
e0 (già abbiamo la (22.1), un risultato di esistenza e
unicità per i sollevamenti dei cammini). Si denoti con γ
e tale sollevamento. A posteriori,
(♠)
e
e
se f si solleva ad una funzione f , si deve avere f (y) = γ
e(1). Usiamo l’uguaglianza (♠) per definire fe.
Si deve provare che la funzione fe cosı̀ ottenuta
(∗) non dipende dai cammini γy scelti;
(∗∗) è continua.
e
Quanto ad (∗), si deve provare che dati γ e δ cammini da y0 a y, risulta e
γ (1) = δ(1),
dove e
γ e δe denotano
i sollevamenti di f ◦ γ ed f ◦ δ con punto iniziale x
e0 . In generale, i cammini γ e δ non sono omotopi (se lo
fossero, si solleverebbero con lo stesso punto finale per lo step 3), ma grazie alla condizione (19) si sollevano
comunque a cammini con lo stesso punto finale. Per provare ciò usiamo un piccolo trucco, consideriamo
δb := “sollevamento di f ◦ δ con punto finale γ
e(1)”.
e
b
e
b
Proveremo che risulta δ = δ, equivalentemente che δ e δ coincidono in un punto: proveremo che risulta
b
e Il cammino γ∗δ − è un cammino chiuso di estremi y . Per la condizione (19),
δ(0)
= x
e0 (estremo iniziale di δ).
0
e di estremi x
esiste un cammino ω in X
e0 (quindi chiuso) soddisfacente la condizione f⋆ (γ ∗ δ − ) = ̺⋆ (ω) ∈
π1 (X, x0 ). Essendo i cammini f⋆ (γ ∗ δ − ) e ̺⋆ (ω) omotopi, per lo step 3 i rispettivi sollevamenti con punto
iniziale x
e0 hanno stesso punto finale, d’altro canto per come sono stati costruiti si sollevano rispettivamente
a e
γ ∗ δb− ed ω. Ciò prova l’uguaglianza γ
e ∗ δb− (1) = ω(1) (punti finali dei due cammini), i.e. l’uguaglianza
b
δ(0) = x
e0 (che è l’uguaglianza che volevamo provare).
Per provare (∗∗), i.e. la continuità di fe, si deve usare il fatto che Y è localmente connesso per archi: dato
y ∈ Y , esiste un intorno U connesso per archi che ha immagine ben rivestita, sia g il sollevamento di tale
intorno con punto iniziale g(y) = fe(y) (cfr. premessa (♣)). Essendo U connesso per archi, alla luce di come
viene costruita fe si ha g ≡ fe su U (questo perché, per y ′ ∈ U , si può ottenere fe(y ′ ) avendo in mente
come scelta iniziale un cammino del tipo γy′ = γy ∗ β , con β cammino da y a y ′ interamente contenuto
in U ; qui si usano (∗) e l’ipotesi di locale connessione per archi in modo cruciale). Essendo g continua, anche
fe è continua in U e, per l’arbitrarietà di y, è continua.
Si noti che il “candidato sollevamento” fe(y) = y della funzione f : Y ′ → R/Z dell’esempio (20), è esattamente ciò che si ottiene applicando la ricetta di cui alla dimostrazione del Teorema (21). Ma, in perfetta
sintonia con la parte finale di tale dimostrazione, è una funzione continua ovunque eccetto che nel punto 0
dove Y ′ non è localmente connesso per archi.
L’esercizio che segue chiede di scrivere i dettagli della dimostrazione della proprietà (b), cfr. step 2 sopra.
e −→ X un rivestimento banale, Y uno spazio topologico, J ⊆ R un intervallo,
Esercizio 22.2. Sia ̺ : X
e una funzione continua nell’argomento t ∈ J, per ogni y ∈ Y fissato. Si provi che
t0 ∈ J, Fe : Y × J −→ X
se Fe|
ed F := ̺ ◦ Fe sono continue, allora Fe è anch’essa continua.
Y ×{t0 }
Suggerimento: I fogli di ̺ inducono una decomposizione di Y ×J in insiemi sia aperti che chiusi.
Come corollario del teorema del sollevamento dell’omotopia (22), si deducono le affermazioni che seguono.
34
e −→ X un rivestimento di spazi topologici, x ∈ X, e
Corollario 23. Sia ̺ : X
x0 ∈ ̺−1 (x0 ).
0
Allora
e e
(23.1) il morfismo indotto in omotopia ̺⋆ : π1 (X,
x0 ) −→ π1 (X, x0 ) è iniettivo;
(23.2) sollevamenti con stesso punto iniziale di cammini omotopi, hanno stesso punto finale
(non si richiede che i cammini da sollevare siano chiusi: l’estremo iniziale può essere diverso da quello finale).
Dimostrazione. Come già visto, la (23.2) segue dal sollevamento dell’omotopia (step 3 della dimostrazione
e buttandolo giù e risollevandolo con punto
precedente). Proviamo l’iniettività di ̺⋆ . Dato un cammino e
γ in X,
iniziale γ
e(0) si ottiene di nuovo γ
e. Se ̺⋆ (e
γ ) è omotopo al cammino costante, il sollevamento dell’omotopia
ci dice che lo stesso e
γ è omotopo al cammino costante.
◦ ∼ ◦
Nella parte finale di questo paragrafo ci proponiamo di studiare certi legami tra la teoria dell’omotopia e
quella dei rivestimenti. È importante assumere che X sia localmente connesso per archi; non tanto in quanto
ipotesi semplificativa, quanto piuttosto per il fatto che solamente sotto tale ipotesi il gruppo fondamentale ne
codifica meglio la topologia (si veda l’esempio 20 del “quasi cerchio” Y ′ con gruppo fondamentale banale).
D’altro canto, sotto questa ipotesi le componenti connesse di uno spazio X sono aperte (oltre che chiuse), di
conseguenza studiare i rivestimenti di X equivale a studiare i rivestimenti delle sue componenti connesse. Per
questa ragione assumeremo che X sia connesso e localmente connesso per archi (c.l.c.a.). Ugualmente, un
e di uno spazio c.l.c.a. X, in quanto ne eredita le proprietà locali, è anch’esso localmente connesso
rivestimento X
per archi e studiarlo equivale a studiarne le componenti connesse (che sono aperte e chiuse). Assumendo che il
e sia connesso, è anch’esso c.l.c.a. (per esercizio). Si osservi che mettendo insieme le due
nostro rivestimento X
cose, connessione e locale connessione per archi, si ottengono spazi connessi per archi e localmente connessi per
archi (c.a.l.c.a.), i.e. c.l.c.a. = c.a.l.c.a. (per esercizio). Per eventuali riferimenti futuri stabiliamo la seguente
definizione:
Def. 24. Uno spazio c.l.c.a. è uno spazio topologico connesso per archi e localmente connesso
per archi.
e −→ X un rivestimento di spazi connessi per archi (qui l’“l.c.a.” non serve), si fissi
Sia dunque ̺ : X
x0 ∈ X, si considerino due punti nella corrispondente fibra x
e0 , x
e′0 ∈ ̺−1 (x0 ) ed un cammino α
e da x
e0 a
′
x
e0 . Dall’osservazione (4.4) sappiamo che c’è un isomorfismo di gruppi
e x
e x
π1 (X,
e0 ) −→ π1 (X,
e′0 ) ,
Posto α = ̺⋆ (e
α), per funtorialità abbiamo quindi
(24.1)
e x
̺⋆ π1 (X,
e′0 )
=
βe 7→ α
e− ∗ βe ∗ α
e
e x
α− ∗ ̺⋆ π1 (X,
e0 ) ∗ α
e x
e x
i.e. i gruppi ̺⋆ π1 (X,
e0 ) e ̺⋆ π1 (X,
e′0 ) sono coniugati (come sottogruppi di π1 (X, x0 ) naturalmente).
D’altro canto avremmo potuto fissare arbitrariamente un elemento α ∈ π1 (X, x0 ) e definire conseguentemente
e(1), Questo prova
α
e (sollevamento con punto iniziale x
e0 , cosı̀ da avere α = ̺⋆ (e
α)) nonché definire x
e′0 = α
e x
e x
che qualsiasi sottogruppo coniugato a ̺⋆ π1 (X,
e0 ) si ottiene nel modo descritto, i.e. è del tipo ̺⋆ π1 (X,
e′0 )
′
per un qualche x
e0 (cfr. 24.1). Abbiamo pertanto il risultato che segue.
e −→ X di spazi c.l.c.a. individua una classe di
Proposizione 25. Un rivestimento ̺ : X
coniugio di sottogruppi del gruppo fondamentale. Precisamente, fissato x0 ∈ X , la funzione
̺−1 (x0 )
−−−→
x0
e
7→
{ sottogruppi di π1 (X, x0 ) }
e e
̺⋆ π1 (X,
x0 )
ha come immagine i gruppi di una classe di coniugio [H].
Può accadere che tale classe di coniugio sia costituita da un solo elemento, i.e. che H sia normale. Ciò, ad
esempio, accade nei due casi estremi che seguono:
e = X e ̺ è l’identità, si ha H = π (X, x );
• se X
1
0
e è semplicemente connesso (i.e. è il rivestimento universale di X, cfr. def. 31 e Teorema 34 sotto),
• se X
allora H è il sottogruppo banale (costituito dal solo elemento neutro).
35
Def. 25.1. Se H è normale, il rivestimento ̺ si dice normale (̺ ed H come nella Proposizione precedente).
e x
La nozione appena introdotta concerne esclusivamente il rivestimento: la normalità di ̺⋆ π1 (X,
e0 ) non
dipende dalle scelte di x0 e x
e0 ∈ ̺−1 (x0 ). Per x0 fissato, che non dipenda da x
e0 segue dal fatto che la
normalità in teoria dei gruppi è invariante per coniugio, quanto all’indipendenza da x0 è sufficiente osservare
che la condizione in questione è aperta (se è vera per x0 lo è anche per ogni x in un intorno ben rivestito
di x0 ). Al termine di questo paragrafo vedremo una caratterizzazione geometrica dei rivestimenti normali
e giustificheremo meglio quanto affermato (oss. 37). Il lemma che segue ci dice che il gruppo fondamentale
π1 (X, x0 ) agisce sulla fibra ̺−1 (x0 ) del rivestimento e descrive tale azione.
e −→ X un rivestimento di spazi c.l.c.a., x ∈ X . C’è un’azione
Lemma 26. Sia ̺ : X
0
transitiva
Ψ : π1 (X, x0 ) × ̺−1 (x0 ) −−−→ ̺−1 (x0 )
(γ
,
e e
con Stabilizzatore (e
x0 ) = ̺⋆ π1 (X,
x0 )
x0 )
e
7→
γe
x0 :=
γex̃ (1)
0
( γex̃0 denota il sollevamento di γ con punto iniziale xe0 ).
(Com’è consuetudine trattando l’azione di un gruppo su un insieme, la giustapposizione γ x
e0 denota Ψ(γ, x
e0 )).
Che Ψ sia un’azione significa che è compatibile con la moltiplicazione in π1 (X, x0 ), che sia transitiva significa
che c’è un’unica orbita, in altri termini che l’azione collega ogni coppia di punti, lo stabilizzatore di un elemento
è il sottogruppo costituito dagli elementi del gruppo che lo lasciano fisso. In formule:
i) x0 x
e0 = x
e0 , δ (γ x
e0 ) = (γ ∗ δ) x
e0 , ∀ γ, δ ∈ π1 (X, x0 ) , x
e0 ∈ ̺−1 (x0 ) ;
′
′
e0 = x
e0 ;
ii) ∀ x
e0 , x
e0 ∈ π1 (X, x0 ) , ∃ γ ∈ π1 (X, x0 ) | γ x
iii) Stabilizzatore (e
x0 ) := { γ ∈ π1 (X, x0 ) | γe
x0 = x
e0 } .
dove ricordiamo che x0 denota l’elemento neutro del gruppo π1 (X, x0 ), cioè il cammino costante x0 (t) = x0 .
Dimostrazione. Il teorema del sollevamento dell’omotopia (22), o meglio l’affermazione (23.2), garantisce che
e da x
Ψ è ben definita. La i) è evidente, quanto alla ii) è sufficiente considerare un cammino γ
e in X
e0 a x
e′0 e
e
buttarlo giù in X , i.e. prendere γ = ̺⋆ (e
γ ). Infine, quanto all’uguaglianza Stabilizzatore (e
x0 ) = ̺⋆ π1 (X, x
e0 ),
l’inclusione “⊇” segue dal fatto che se si prende un cammino con estremi x
e0 , lo si butta giù e lo solleva
con estremo iniziale x
e0 si ottiene il cammino dal quale si era partiti, in particolare con estremo finale x
e0 ,
l’inclusione “⊆” è analoga.
e sia semplicemente connesso, ogni punto x
Nelle ipotesi del Lemma (26), assumendo che X
e0 ∈ ̺−1 (x0 ) ha
stabilizzatore banale e, di conseguenza, corrispondente orbita che si identifica col gruppo π1 (X, x0 ). D’altro
canto, per la transitività dell’azione, sappiamo che tale orbita è tutta la fibra ̺−1 (x0 ). In altri termini, si ha
il risultato seguente:
e −→ X un rivestimento di spazi c.l.c.a.. Se X
e è semplicemente
Corollario 27. Sia ̺ : X
connesso, la funzione
ψ0 : π1 (X, x0 ) −→ ̺−1 (x0 )
(x0 = ̺(ex0 ), xe0 fissato)
γ
è biunivoca.
7→
γe
x0
Ricordiamo che γe
x0 denota l’estremo finale del sollevamento di γ con punto iniziale x
e0 (i.e. γe
x0 = γ
ex̃ (1),
0
cfr. lemma. 26).
Considerando cammini con estremo finale arbitrario (non fissato), questa corrispondenza si estende: le classi
e cioè c’è una corrispondenza
d’omotopia di cammini con estremo iniziale x0 si identificano con l’intero spazio X,
biunivoca
1:1
e
ψ : Γ = (x, γx0 , x ) x ∈ X , γx0 , x ∈ ̥x0 , x
←−−→
X
(27.1)
( x , γx 0 , x )
7→
γ (1)
e
e
x0
dove ̥x0 , x denota l’insieme delle classi d’omotopia di cammini da x0 ad x e dove, come al solito, e
γ
e
x
0
denota
36
il sollevamento di γ = γx0 , x con punto iniziale x
e0 . (Naturalmente, cammini γx0 , x e coppie (x, γx0 , x ) sono
sostanzialmente la stessa cosa, abbiamo preferito usare i secondi semplicemente per enfatizzare il ruolo di x).
e → X è la proiezione (x, γ) 7→ x. Ribadiamo alcuni punti: il sollevamento
N.b.: la composizione Γ → X
e dà
dei cammini e dell’omotopia ci dicono che tale funzione è ben definita, la connessione per archi di X
e dà l’iniettività: per come è definita ψ, dire che due elementi
la suriettività, la semplice connessione di X
e significa dire che i sollevamenti γ
(x, γ), (x′ , γ ′ ) ∈ Γ hanno la stessa immagine in X,
e di γ e γ
e′ di γ ′
e semplicemente connesso, γ
hanno lo stesso estremo finale; essendo X
e e γ
e′ sono omotopi, buttando giù in X
′
′
l’omotopia si ottiene (x, γ) = (x , γ ).
Nota. Di nuovo, fin qui è sufficiente assumere la connessione per archi: l’“l.c.a.” non l’abbiamo mai utilizzata.
A questo punto siamo pronti ad introdurre il cosiddetto rivestimento universale. Premettiamo una definizione
ed alcune considerazioni. Consideriamo un diagramma commutativo
X1
(28)
f
−−→
→ X2
̺
̺1 ց
y 2
(̺1 e ̺2 rivestimenti,
f suriettiva, ̺1 = ̺2 ◦ f )
X
Def. 29. Nella situazione del diagramma (28) diciamo che ̺1 domina ̺2 tramite f .
Esercizio 29.1. Si provi che nelle ipotesi della definizione (29), se X è c.l.c.a., anche f è un rivestimento.
̺′
̺
Esercizio 29.2. Siano X ′′ −→ X ′ e X ′ −→ X due rivestimenti. Si provi che se ̺ è finito (le fibre sono
finite), allora la composizione ̺ ◦ ̺′ è anch’essa un rivestimento.
Avvertenza. Per quanto possa sorprendere, in generale può accadere che la composizione di rivestimenti non
sia un rivestimento (per dare un controesempio, nelle notazioni dell’esercizio, gli aperti ben rivestiti per ̺′
dei punti di una fibra ̺−1 (x) di ̺ devono “essere via via più piccoli”, cosı̀ da fare in modo che x non abbia
intorni ben rivestiti per ̺ ◦ ̺′ ).
Accanto al diagramma (28), c’è un diagramma analogo per i corrispondenti gruppi d’omotopia. Qui, naturalmente, abbiamo fissato dei punti
(x0 ), x1 ∈ f −1 (x2 ).
x0 ∈ X , x2 ∈ ̺−1
2
Come conseguenza del sollevamento dell’omotopia, sappiamo che tutti
i morfismi sono iniettivi (̺1 ⋆ e ̺2 ⋆ lo sono per l’esercizio (23.1), di
conseguenza lo è anche f⋆ ):
̺1 ⋆ π1 (X1 , x1 )
<
̺2 ⋆ π1 (X2 , x2 )
<
π1 (X, x0 )
f⋆
π1 (X1 , x1 ) −−→ π1 (X2 , x2 )
̺
̺1 ⋆ ց
y 2⋆
π1 (X, x0 )
Grazie al teorema del sollevamento (21) il discorso appena fatto si inverte:
Lemma 30. Siano ̺1 e ̺2 rivestimenti puntati di spazi c.l.c.a.,
come nel diagramma a lato. La condizione
(♣)
̺1 ⋆ π1 (X1 , x1 )
⊆
̺2 ⋆ π1 (X2 , x2 )
(X1 , x1 )
̺1ց
è c.n.e.s. affinché ̺1 domini ̺2 tramite un morfismo di rivestimenti puntati.
(X2 , x2 )
̺
y2
(X, x0 )
e x
Per definizione, un rivestimento puntato è un rivestimento ̺ : (X,
e) → (X, x) di spazi puntati, i.e.
soddisfacente la condizione ̺(e
x) = x (nel lemma, i punti x0 , x1 , x2 sono fissati, ̺1 (x1 ) = x0 e ̺2 (x2 ) = x0 ,
dire che ̺1 domina ̺2 tramite un morfismo di rivestimenti puntati significa dire che esiste f come nel
diagramma (28) soddisfacente f (x2 ) = x1 .
Dimostrazione. Il fatto che la condizione (♣) sia una condizione necessaria è stato già osservato. Proviamo che
è una condizione sufficiente. Nella situazione del diagramma, sappiamo che esiste un unico sollevamento f di
̺1 con punto iniziale f (x1 ) = x2 se e solo se è soddisfatta la condizione (19), condizione che nel nostro caso
è la condizione (♣). Essendo X2 connesso per archi, tale sollevamento è necessariamente suriettivo (facile,
per esercizio).
37
Osservazione 30.1. Nelle ipotesi del Lemma, se risulta ̺1 ⋆ π1 (X1 , x1 ) = ̺2 ⋆ π1 (X2 , x2 ), si ha anche
f⋆ π1 (X1 , x1 ) = π1 (X2 , x2 ) (essendo ̺1 ⋆ = ̺2 ⋆ ◦ f⋆ , ciò segue dall’iniettività di ̺2 ⋆ ). In questo caso f
è necessariamente un isomorfismo di rivestimenti. Per esercizio, si provi quanto affermato e si descriva f −1
(suggerimento: è possibile scambiare i ruoli di X1 ed X2 ).
Osservazione 30.2. Se inoltre X1 è semplicemente connesso, avendo gruppo fondamentale banale e, di
conseguenza, essendo la condizione (♣) una condizione vuota (i.e. “certamente verificata”), il rivestimento ̺1
domina ogni altro rivestimento connesso. Ciò suggerisce la definizione che segue.
Def. 31. Un rivestimento universale di uno spazio X connesso per archi è un rivestimento
e è semplicemente connesso.
dove X
e −−−→ X
̺ : X
La corrispondenza biunivoca (27.1) fornisce un candidato naturale per la costruzione del rivestimento universale, l’insieme ivi indicato delle coppie “punto x, classe d’omotopia di un cammino da x0 ad x” (essendo
x0 un punto fissato). Osserviamo che tale insieme è dotato di una proiezione naturale sullo spazio X, la
proiezione sul primo fattore. Non è detto che vada sempre bene:
Un’ostruzione all’esistenza del rivestimento universale può venire dall’omotopia locale, ad esempio, l’orecchino
hawaiano (l’unione dei cerchi di raggio 1/n come in figura, con la topologia indotta dal
p
piano), non ammette rivestimento universale. Naturalmente, non è detto che l’omotopia locale sia sempre un’ostruzione: il cono sull’orecchino hawaiano, in quanto spazio contraibile,
è il rivestimento universale di se stesso pur avendo omotopia locale non banale.
Stabiliremo una condizione necessaria per l’esistenza del rivestimento universale20 , condizione non soddisfatta
dall’orecchino hawaiano (cfr. esercizio 35). Per ora ci limitiamo ad osservare che ogni intorno di p ha gruppo
di omotopia non banale; d’altro canto, dato un rivestimento, il punto p deve avere un intorno ben rivestito!
Definizione 32. Uno spazio topologico X si dice
(32.1) localmente semplicemente connesso se ogni punto x ∈ X ha una base di intorni semplicemente connessi;
ogni punto x ∈ X ha un intorno U per il quale
(32.2) semilocalmente semplicemente connesso se
il morfismo π1 (U, x) −→ π1 (X, x) è banale (=nullo)
Chiaramente, valgono le implicazioni schematizzate:
semplice connessione
=⇒
locale semplice connessione =⇒
semilocale semplice connessione.
(Il cono sull’orecchino hawaiano è semplicemente connesso pur non essendo localmente semplicemente connesso).
e → X è un rivestimento universale, gli spazi X
e ed X sono entrambi semiloOsservazione 33. Se ̺ : X
e
calmente semplicemente connessi. Infatti, il rivestimento universale X lo è in quanto spazio semplicemente
e (dato x ∈ X, ogni intorno ben rivestito U soddisfa automaticamente
connesso, mentre X lo è perché lo è X
ei come nella def. 14, possiamo scrivere l’inclusione U ֒→ X
la condizione della definizione (31.2): fissato un U
̺
≃ e
e
come composizione U −→ Ui ֒→ X −→ X ; il corrispondente morfismo in omotopia, fattorizzandosi per un
gruppo nullo, deve essere nullo). Questa considerazione ci dice quanto segue
(♠) la semilocale semplice connessione è una condizione necessaria per l’esistenza del rivestimento universale.
Il Teorema (34) che segue ci dice che tale condizione è anche sufficiente: assumere che una spazio c.l.c.a. abbia
un rivestimento universale equivale ad assumere che sia semilocalmente semplicemente connesso.
Teorema 34. Sia X uno spazio topologico c.l.c.a. semilocalmente semplicemente connesso.
Si ha che esiste, ed è unico a meno di omeomorfismi di rivestimenti, il rivestimento universale.
20
In effetti, poi proveremo che è anche sufficiente.
38
Esercizio 35. Verificare che l’orecchino hawaiano (vedi sopra) non è semilocalmente semplicemente connesso e
pertanto non ammette rivestimento universale (oss. 33, ♠). Considerare il candidato dato dalla corrispondenza
biunivoca (27.1), studiarlo e comprendere perché non è un rivestimento universale.
Dimostriamo ora il Teorema (34) di esistenza e unicità del rivestimento universale.
Dimostrazione.
primo fattore
Fissiamo x0 ∈ X , quindi consideriamo l’insieme a sinistra della (27.1) e la proiezione sul
̺
e :=
X
(x, γx0 , x ) x ∈ X , γx0 , x ∈ ̥x0 , x
−−−−→
X
Gli aperti connessi per archi U ⊆ X per i quali il morfismo π1 (U ) → π1 (X) è banale (cfr. convenzione
4.6), chiamiamoli buoni aperti. Per ogni buon aperto U consideriamo gli insiemi del tipo indicato:
fissato un cammino γ in X con γ(0) = x0 , γ(1) ∈ U , si considera
Uγ := (x, [γ ∗ β]) β cammino in U da γ(1) a x
dove [γ∗β] denota la classe d’omotopia di γ∗β. Per le ipotesi su U , la proiezione sul primo fattore ̺ : Uγ → U
è biunivoca. Osserviamo che se U è un buon aperto, lo sono anche le componenti connesse V degli aperti in
esso contenuti. Inoltre, c’è un’inclusione naturale Vγ ⊆ Uγ , (γ come sopra, con γ(1) ∈ V ). Da ciò segue che
l’intersezione di due insiemi della famiglia degli Uγ è unione di insiemi della famiglia, ovvero che tale famiglia
e , dotiamo X
e di tale topologia. Quanto appena osservato, poiché i
è una base per una qualche topologia su X
buoni aperti sono una base per la topologia di X, ci dice anche che i vari ̺ : Uγ → U sono omeomorfismi (oltre
che funzioni biunivoche). Fissato U , l’immagine inversa ̺−1 (U ) coincide con l’unione su tutti i possibili γ dei
vari Uγ (per esercizio), nonché per due aperti Uγ e Uγ ′ vale la seguente dicotomia: o coincidono (ciò accade se
γ ∗β e γ ′ sono omotopi, per qualche β cammino in U ), o sono disgiunti (altrimenti). Ne segue che la proiezione
e → X è un rivestimento: i buoni aperti sono aperti ben rivestiti. Resta da verificare che X
e è semplice̺: X
mente connesso. Il cammino γ
e definito ponendo γ
e(t) = γ(t), [γ (t) ] , γ (t) (s) := γ(ts) , s ∈ [0, 1] γ (t) è
una riparametrizzazione della restrizione di γ a [0, t] , è un cammino da (x0 , x0 ) a (x, [γ]) nonché il sollee e ci dice che il cammino γ ∈ π (X, x ) si
vamento del cammino γ . Ciò prova la connessione per archi di X
1
0
e di conseguenza lo stabilizzatore del punto x
e
solleva con punto finale γ
e(1) = (x0 , [γ]) ∈ X,
e0 := (x0 , x0 ) ∈ X
e
è banale. Da ciò segue che X ha gruppo fondamentale banale: essendo il morfismo indotto in omotopia iniete x
tivo, per il lemma (26) si deve avere π1 (X,
e0 ) = 0 . Infine, l’unicità a meno di isomorfismi di rivestimenti
segue dal lemma (30): nelle notazioni ivi utilizzate, se ̺1 e ̺2 sono rivestimenti universali, la condizione (♣)
è vuota ed il corrispondente morfismo di rivestimenti f è un isomorfismo per l’osservazione (30.1).
e x
Dato un rivestimento ̺ : (X,
e0 ) −→ (X, x0 ) di spazi puntati, il morfismo indotto ̺⋆ è iniettivo e
e x
̺⋆ π1 (X,
e0 ) è un sottogruppo del gruppo fondamentale π1 (X, x0 ) (cfr. 23.1). Di contro, se partiamo da
un sottogruppo G < π1 (X, x0 ), nelle stesse ipotesi del teorema (34) è possibile trovare un rivestimento di
e x
e x
spazi puntati ̺ : (X,
e0 ) −→ (X, x0 ) in modo che risulti ̺⋆ π1 (X,
e0 ) = G. Inoltre, un tale rivestimento
è unico (modulo isomorfismi di rivestimenti di spazi puntati). Sottolineiamo che il già citato Teorema (34)
stabilisce quanto affermato nel caso G = 0.
Teorema 36. Sia (X, x0 ) uno spazio puntato c.l.c.a. semilocalmente semplicemente connesso. C’è una corrispondenza biunivoca
{ rivestimenti puntati di (X, x0 ) }/
e e
̺ : (X,
x0 ) −→ (X, x0 )
Iso
−−−→
1:1
{ sottogruppi di π1 (X, x0 ) }
7→
e e
̺⋆ π1 (X,
x0 )
(ricordiamo che, per definizione di rivestimento puntato, nella notazione di cui sopra si deve avere ̺(e
x0 ) = x0 ).
Dimostrazione (indicazione). Il lemma (30) e l’osservazione (30.1) garantiscono l’iniettività. Per provare la
suriettività si può procedere in due modi.
I metodo: Lo spazio X, in quanto ammette rivestimento universale, è semilocalmente semplicemente connesso.
A questo punto, assegnato un sottogruppo G < π1 (X, x0 ), si costruisce un rivestimento
̺′ : (X ′ , x′ ) → (X, x0 ) tale che risulti ̺′⋆ (X ′ , x′ ) = G
come nella dimostrazione dell’esistenza del rivestimento universale (che è il caso G = 0).
II metodo: Dato G < π1 (X, x0 ), si costruisce un quoziente opportuno del rivestimento universale. L’idea
è molto semplice: si identificano i punti nell’orbita di x
e0 tramite G (lemma 26), quindi si trasporta tale
39
e si definisce la relazione d’equivalenza che segue:
identificazione. Precisamente, sul rivestimento universale X
x
e ∼ x
e′ ⇐⇒ x := ̺(x) = ̺(x′ ), ∃ g ∈ G, γ cammino da x0 ad x x
e = γ
e(1), x
e′ = e
γ ′ (1) (γ ′ := g ∗ γ)
dove γ
e e γ
e′ come al solito denotano e sollevamenti di γ e γ ′ con punto iniziale x
e0 . Si osservi che se si sceglie
γ = x0 (cammino costante) si ottiene x
e = x
e0 e x
e′ = g x
e0 (cfr. lemma 26), ovvero come già menzionato i
punti dell’orbita Ge
x0 vengono identificati tra loro. Nei termini dell’idea intuitiva di cui sopra, il cammino γ
funge da trasporto per tale identificazione. A questo punto si deve fare solo una noiosa serie di verifiche:
i)
∼ è una relazione d’equivalenza;
ii)
̺ passa al quoziente modulo ∼ (i.e. c’è un diagramma commutativo come a lato);
iii) il diagramma a lato è un diagramma di rivestimenti;
iv)
effettivamente risulta
G =
̺′⋆
e ∼, [e
π1 (X/
x0 ])
e
X
q
e ∼
−−→
→ X/
′
̺ց
y̺
X
e ∼ la classe di x
(essendo [e
x0 ] ∈ X/
e0 ).
Le prime tre verifiche sono, come dire, di “routine” e le lasciamo per esercizio. Ai fini dell’ultima verifica, alla
luce del lemma (26) è sufficiente verificare che lo stabilizzatore di [e
x0 ] coincide col sottogruppo G, ciò segue
immediatamente da come è stata definita la relazione ∼.
Supponiamo di avere un rivestimento di spazi c.l.c.a. puntati
e e
̺ : (X,
x0 ) −→ (X, x0 ).
La scelta di un altro punto x′0 della fibra ̺−1 (x0 ) consente di scrivere il diagramma
e.
a lato. Questo non è altro che il diagramma del lemma (30) per X1 = X2 = X
Come conseguenza del già citato lemma (30) e dell’osservazione (30.1), assumendo
che si abbia
(♠)
e
̺′⋆ π1 (X,
′
x
e0 )
=
e x
̺⋆ π1 (X,
e0 )
e x
(X,
e0 )
̺ց
e x
(X,
e′0 )
′
y̺
(X, x0 )
e x
e x
c’è un omeomorfismo di rivestimenti puntati f : (X,
e0 ) −→ (X,
e′0 ).
e x
Assumendo che il sottogruppo ̺⋆ π1 (X,
e0 ) < π1 (X, x0 ) sia normale, si ha che la condizione (♠) è automaticamente soddisfatta per ogni scelta di x
e′0 . Infatti, per la Proposizione (25), o meglio per le considerazioni che
e x
e x
e′0 ) e ̺⋆ π1 (X,
e0 ) sono coniugati. In questo caso pertanto,
la precedono, sappiamo i due gruppi ̺′⋆ π1 (X,
e x
e x
esiste un omeomorfismo di rivestimenti puntati f : (X,
e0 ) −→ (X,
e′0 ) per ogni scelta di x
e′0 .
e x
e x
Viceversa, l’esistenza di un omeomorfismo di rivestimenti puntati f : (X,
e0 ) −→ (X,
e′0 ) implica la con′
e x
dizione (♠). Se ciò accade per ogni scelta di x
e0 , per la Proposizione (25) abbiamo che ̺⋆ π1 (X,
e0 ) coincide
con ogni suo coniugato, di conseguenza è normale.
e → X
e che porta x
Osservazione 37. Un omeomorfismo di rivestimenti f : X
e0 in x
e′0 non è altro che
e → X
e che porta il foglio contenente x
un omeomorfismo di rivestimenti f : X
e0 in quello contenente x
e′0 ,
relativamente ad un intorno ben rivestito U di x0 (cfr. def. 14). Di conseguenza, l’esistenza di un tale
omeomorfismo non dipende da x0 ∈ U . Tornando alle considerazioni che seguono la definizione (25.1), ciò
e x
prova quanto già ivi preannunciato: la condizione di normalità (di ̺⋆ π1 (X,
e0 ) per un −equivalentemente
ogni− punto x
e0 nella fibra di x0 ), vale per x0 se e solo se vale anche per ogni x in un suo intorno ben
rivestito e, di conseguenza, non dipende da x0 (il luogo dove è verificata è sia aperto che chiuso, ed X è
connesso per ipotesi).
In definitiva, abbiamo provato il risultato che segue.
e −→ X un rivestimento di spazi c.l.c.a.. Le condizioni che
Proposizione 38. Sia ̺ : X
seguono sono equivalenti :
i)
̺ è un rivestimento normale;
ii) fissato x0 ∈ X , per ogni coppia di punti e
x0 , e
x′0 ∈ ̺−1 (x0 ) esiste un omeomorfismo di
rivestimenti puntati
e e
e e
f : (X,
x0 ) −→ (X,
x′0 ) .
40
§ 3.
Omologia.
“L’omologia è l’omologia singolare”.
I mattoni con i quali si costruisce l’omologia singolare sono i simplessi singolari. L’idea di fondo è che un
simplesso singolare di uno spazio topologico X sia una funzione da un “triangolo di dimensione n” ad X .
Come primo passo si fissano una volta per tutte tali “n-triangoli”, i cosiddetti simplessi standard:
Def. 1.1. Poniamo ∆0 = {pt} (un punto) e, per n ≥ 1, poniamo21
P
∆ n = n-simplesso standard =
x ∈ Rn 0 ≤ xi ,
xi ≤ 1
e denotiamo, ordinatamente, con ℓ 0 , ..., ℓ n i vertici di ∆ n
ℓ 0 denota l’origine di Rn e, per i ≥ 1, ℓi denota l’i-esimo punto della base canonica di Rn .
Raffiguriamo i simplessi standard per n basso:
ℓ2
ℓ2
ℓ3
ℓ0
ℓ0
∆0
ℓ1
ℓ0
∆1
ℓ1
ℓ0
∆2
ℓ1
∆3
Il passo successivo è quello di introdurre le facce del simplesso standard ∆ n . L’idea è che, ad esempio,
le facce del 2-simplesso standard ∆ 2 siano le 3 funzioni naturali dall’intervallo I ai 3 lati del triangolo
(opportunamente orientati), le facce del 3-simplesso standard ∆ 3 (che è un tetraedro) siano le 4 funzioni dal
triangolo ∆ 2 alle 4 facce del tetraedro e, più in generale, le facce di ∆ n siano certe funzioni da ∆ n−1 a ∆ n .
Def. 1.2. Sia n ≥ 1. Per j che va da 0 ad n si definisce la “faccia j di ∆n ” Fj ponendo
P
(1 − xi , x1 , ..., xn−1 ) ,
j = 0
Fj : ∆n−1 −→ ∆n , (x1 , ..., xn−1 ) 7→
(x1 , ..., xj−1 , 0, xj , ..., xn−1 ) , j ≥ 1
(per convenzione, ∆0 non ha facce).
Oss. 1.3. La faccia Fj è la (unica) funzione lineare che manda ordinatamente i vertici ℓ′0 , ..., ℓ′n−1 di ∆n−1
nei vertici ℓ 0 , ..., ℓ j−1 , ℓ j+1 , ..., ℓ n di ∆n (si salta il vertice ℓ j ).
Le due facce di ∆1 = I sono le due funzioni che mandano ∆0 = {pt} ad uno dei due estremi di ∆1 :
F0 : {pt} −→ I, pt 7→ 1
e
F1 : {pt} −→ I, pt 7→ 0 .
Le tre facce di ∆2 sono le tre funzioni rappresentate in figura
F0
ℓ2
F1
∆1 =
= ∆2
ℓ0
ℓ1
F2
Sottolineiamo che Fj , coerentemente con l’osservazione (1.3), manda ∆1 nel lato di ∆2 non contenente
il vertice ℓj . Inoltre, Fj è lineare e l’ordine naturale dei vertici viene conservato (si noti che tutto ciò la
individua univocamente).
Quanto sopra vale in ogni dimensione (ad esempio, la faccia Fj di ∆3 è la funzione lineare che manda ∆2
nella “faccia del tetraedro” non contenente il vertice ℓj , sempre rispettando l’ordine dei vertici).
P
Alcuni testi considerano come n-simplesso standard l’insieme { x ∈ Rn+1 | 0 ≤ xi ,
xi = 1}, per quanto ciò possa disturbare
3
(...perché vedere l’intervallo I nel piano, un triangolo in R eccetera!), presenta il vantaggio combinatorico che nel definire le
facce (cfr. def. 1.2) non si deve distinguere il caso j = 0.
21
41
Def. 2. Sia X uno spazio topologico. Un n-simplesso singolare di X è una funzione continua
(2.1)
∆n −−−→ X .
σ :
Si definisce il gruppo delle n-catene di X come il gruppo abeliano libero (cfr. §A1, 11) generato
dagli n-simplessi singolari:
P
(2.2)
Cn (X) :=
ni σi n ∈ Z, σ ∈ {n−simplessi singolari}
i
i
Inoltre, si definisce l’operatore di bordo
(2.3)
Cn (X) −−−→
Cn−1 (X)
P
P P
ni σi
7→
ni
(−1)j σi ◦Fj
∂n :
i
i
j
Per convenzione, si pone Cn (X) = 0 per n < 0. Le somme che compaiono nella (2.2) sono somme formali
finite e l’operazione di gruppo è la somma di somme formali, l’elemento neutro è dato dalla somma vuota,
che si denota con 0. La faccia j di un n-simplesso singolare σ è la composizione σ ◦ Fj , il bordo di σ è
la somma alterna delle sue facce, la definizione viene estesa alle n-catene per linearità. La somma diretta dei
vari Cn (X) viene denotata con C• (X). Si noti che C• (X) coincide col gruppo abeliano libero generato da
tutti (non si fissa n) i simplessi singolari e che mettendo insieme i vari ∂n si ottiene un operatore
(3)
∂ :
C• (X) −→ C• (X) .
Lemma 4. Risulta ∂ ◦ ∂ = 0
(i.e. ∂n−1 ◦ ∂n = 0 , ∀ n).
Esercizio 4.1. Si provi il lemma (4).
Suggerimento: per un n-simplesso singolare σ la n−2 catena ∂n−1 ∂n σ è costituita da (n+1) n termini
che si cancellano a coppie. (Possono tornare utili la notazione 13.1 e la formula 13.2 introdotte più avanti).
Per il lemma (4), il gruppo graduato C• (X), con l’operatore di bordo ∂ , è un complesso di catene discendente
(cfr. Def. §A2, 4). Naturalmente è un complesso di catene libero, cioè costituito da gruppi abeliani liberi. La
definizione che segue ci dice che l’omologia dello spazio topologico X è l’omologia di tale complesso di catene:
Def. 5. Sia X uno spazio topologico. Si definisce l’omologia singolare di X ponendo
(5.1)
Hn (X)
:=
Hn C• (X), ∂
=
ker ∂n
.
image ∂n+1
(cfr. §A2, 3)
Inoltre, si definisco i numeri di Betti di X ponendo
(5.2)
βn (X)
:=
rango Hn (X)
(cfr. §A1, 16)
Gli elementi in ker ∂n si chiamano n -cicli, quelli in image ∂n+1 si chiamano n -bordi.
Esempio 6. Se X = {pt} è un punto, allora il complesso C• (X) è il complesso
0
Id
0
Id
0
Id
0
... −→ Z −→ Z −→ Z −→ Z −→ Z −→ Z −→
Z
(= C0 )
−→ 0
Ne segue che H0 (X) = Z e Hk (X) = 0 per k ≥ 1.
Osservazione 7. Sia C = {Xα } l’insieme delle componenti connesse per archi di X . Risulta
L
(7.1) Hn (X) =
α Hn (Xα ) ;
(7.2)
H0 (X) = “gruppo abeliano libero generato da C ” (cioè, una copia di Z per ogni componente Xα ).
La (7.1) segue dal fatto che essendo i simplessi standard connessi per archi, l’immagine di ogni simplesso
singolare è contenutaL
in una qualche componente Xα e, di conseguenza, c’e un isomorfismo naturale di
complessi C• (X) =
α C• (Xα ). Premesso che C0 (X) si identifica col gruppo abeliano libero sui punti di
X e che la differenza di due punti di una stessa componente connessa per archi è il bordo di P
un 1-simplesso
(un cammino che li collega), si ha che la (7.2) segue dalla (7.1) e dal fatto uno 0-simplesso
ni pi di una
42
P
componente connessa perP
archi è unP
bordo se e solo se ha grado
ni = 0 (per ogni componente Xα , la
funzione H0 (Xα ) → Z,
ni pi 7→
ni è un isomorfismo di gruppi).
Definizione 8. Diremo che un simplesso è supportato su un insieme se la sua immagine è contenuta in esso.
Proposizione 9. Una funzione continua f : X −→ Y tra spazi topologici induce un
morfismo di complessi
f♯ : C• (X) −−−→
C• (Y )
(9.1)
P
P
ni σi 7→
ni (f ◦ σi )
e pertanto induce dei morfismi in omologia
(9.2)
f⋆ :
(cfr. §A2, 8.1)
Hn (X) −−−→ Hn (Y )
Notazione 9.3. Utilizzeremo sistematicamente la notazione appena introdotta: data f come sopra denoteremo con f♯ il corrispondente morfismo di catene e con f⋆ il morfismo indotto in omologia.
Dimostrazione. Per il corollario (§A2, 8.1) è sufficiente verificare che f♯ è un morfismo di complessi (cfr. §A2, 6),
ovvero che il diagramma
. . . −→ Cn (X)
f
y ♯
. . . −→
Cn (Y )
∂
n
−→
∂
n
−→
Cn−1 (X)
f
y ♯
Cn−1 (Y )
−→ . . . −→
−→ . . . −→
C2 (X)
f
y ♯
C2 (Y )
∂
2
−→
∂
2
−→
C1 (X)
f
y ♯
C1 (Y )
∂
1
−→
∂
1
−→
C0 (X)
f
y ♯
C0 (Y )
−→ 0
−→ 0
è un diagramma commutativo. Questo segue immediatamente dalla definizione di f♯ .
f
g
I morfismi indotti in omologia sono funtoriali: date X −→ Y e Y −→ Z risulta
(10)
(g ◦ f )⋆
=
g⋆ ◦ f⋆ ,
(IdX )⋆
=
IdH• (X)
(dove Id sta per “identità”).
La funtorialità è una conseguenza immediata delle definizioni. Un risultato che vedremo più avanti, meno immediato (ma per un certo verso elementare), è il fatto che funzioni f, g : X −→ Y omotope inducono morfismi
di complessi di catene omotopi e, di conseguenza, inducono lo stesso morfismo in omologia (Lemma 19). Da
questi risultati segue che uno spazio contraibile ha gli stessi gruppi di omologia del punto (cfr. Cor. 19.1).
Sottolineiamo che già per X = R i vari Ck (X) sono gruppi liberi generati da insiemi non numerabili, per
cui, a priori, non è affatto ovvio che R abbia la stessa omologia del punto!
Definizione 11. Dato X non-vuoto, si ha che esiste unico π : X −→ {pt} (spazio costituito da un punto).
Se il morfismo indotto in omologia π⋆ : Hn (X) −→ Hn ({pt}) è un isomorfismo per ogni n diciamo che X
è aciclico.
Esercizio 11.1. Sia X non-vuoto, provare che
X è aciclico ⇐⇒ Hn (X) = 0, n ≥ 1, H0 (X) ∼
= Z
(i.e. X ha la stessa omologia del punto).
Come conseguenza della funtorialità, in omologia troviamo un risultato già visto in omotopia (esercizio §2, 5.4)
che di nuovo proponiamo come esercizio.
Esercizio 12.
Provare che se π : X → A è una retrazione, allora i⋆ è iniettiva e π⋆ è suriettiva
(A ⊆ X, i : A → X denota l’inclusione) e se π : X → A è una retrazione di deformazione, allora i⋆ e π⋆
sono isomorfismi l’uno l’inverso dell’altro (naturalmente, ai fini di quest’ultima affermazione si utilizzi il già
citato lemma 19 enunciato più avanti).
Come osservato, già per X = R il complesso C• (X) è costituito in ogni grado da gruppi abeliani enormi,
eppure la sua omologia si riduce all’omologia del punto. Nelle due sezioni che seguono entriamo nel merito
della combinatorica dei simplessi con un duplice scopo, il primo è quello di illustrare i principi per i quali
nel passaggio dal complesso C• (X) alla sua omologia sparisce “tutto ciò che deve sparire” (cosa e perché),
o meglio di comprendere un po’ la natura dell’omologia, il secondo è quello di fissare gli strumenti che ci
serviranno in seguito, in particolare dimostrare la Proposizione (15) enunciata sotto.
43
Simplessi singolari: notazione fondamentale
In questa sezione introduciamo una notazione che risulta particolarmente utile quando si vogliono fare dei
calcoli espliciti e che useremo abbondantemente nelle due sezioni che successive, sezioni dedicate a due risultati
tecnici di base la cui dimostrazione richiede di entrare nel merito della combinatoria dei simplessi singolari e
delle catene:
• Teorema di raffinamento (Prop. 15);
• Teorema di invarianza omotopica (Teorema 19).
Dato un insieme ordinato di punti {v0 , ..., vn } di uno spazio reale affine A (sottolineiamo che non si fa alcuna
ipotesi sui punti in questione, che pertanto possono anche coincidere), poniamo
⌊v0 , ..., vn ⌋
(13.0)
:=
inviluppo convesso dei vi
(:= intersezione di tutti i sottoinsiemi convessi
di A contenenti i vi ).
C’è una, unica, (restrizione di una) trasformazione affine Γ : ∆n −→ ⌊v0 , ..., vn ⌋ che manda ordinatamente
i vertici ℓ0 , ..., ℓn del simplesso standard ∆n nei vi ℓ0 denota l’origine di Rn e, per i ≥ 1, ℓi denota
l’i-esimo punto della base canonica di Rn . Se X è uno spazio topologico e D un sottoinsieme dello spazio
affine A, contenente l’inviluppo convesso dei vi , una funzione continua φ : D → X può essere vista come
n-simplesso singolare (Def. 2) considerando la composizione φ ◦ Γ (ad essere rigorosi, la composizione di Γ
con la restrizione φ|⌊v , ..., v ⌋ ). Introduciamo la notazione seguente.
n
0
Notazione 13.1. Dati {v0 , ..., vn } e φ come sopra, definito Γ anch’esso come sopra, si
pone
[v0 , ..., vn ] φ := φ ◦Γ
⌊v0 , ..., vn ⌋
φ
Γ
i.e. [v0 , ..., vn ] φ è la composizione ∆ n −−−→ ⌊v0 , ..., vn ⌋ −−→ X .
Ribadiamo che quello appena introdotto è un n-simplesso singolare di X (def. 2): la notazione appena
introdotta è un modo formale di “vedere n-triangoli a valori in X come n-simplessi singolari di X”.
Come sopra, denotiamo con ℓ0 , ..., ℓn i vertici di ∆n . I simplessi singolari sono essi stessi funzioni ed
i simplessi standard ∆n sono sottoinsiemi dei vari Rn (che sono spazi affini). Pertanto, un n-simplesso
singolare σ : ∆n → X ed il suo bordo ∂ σ possono essere scritti nella notazione appena introdotta. Risulta
n
P
i
(−1) [ℓ0 , ..., ℓbi , ..., ℓn ] σ
(13.2)
σ = [ℓ0 , ..., ℓn ] σ ,
∂σ =
i=0
e, più in generale risulta
(13.3)
∂ [v0 , ..., vn ] φ
=
n
P
i=0
i
(−1) [v0 , ..., vbi , ..., vn ] φ
dove il cappuccio “ ...
ˆ ” indica che il termine indicato viene omesso, ad esempio, [v0 , ..., vbi , ..., vn ] φ
[v0 , ..., vi−1 , vi+1 , ..., vn ] φ .
:=
Dimostrazione. Le uguaglianze nelle (13.2) e (13.3) sono sostanzialmente delle tautologie. Nel caso di
[ℓ0 , ..., ℓn ] σ la funzione Γ è caratterizzata dal portare ogni ℓi in se stesso, di conseguenza è la funzione
identità Id∆n : ∆n → ∆n . Applicando alla lettera la ricetta della notazione (13.1) si ha [ℓ0 , ..., ℓn ]σ =
σ ◦ Id∆n = σ. Nel caso di [ℓ0 , ..., ℓbi , ..., ℓn ]σ , la funzione Γ porta i vertici di ∆n−1 nei vertici di ∆n
che compaiono nella sequenza (ℓ0 , ..., ℓbi , ..., ℓn ), di conseguenza coincide con la funzione Fi (cfr. def. 1.2 e
oss. 1.3), ne segue che i vari [ℓ0 , ..., ℓbi , ..., ℓn ]σ sono i vari contributi σ ◦ Fi che compaiono nella definizione
del bordo di σ (cfr. def. 2.3). L’uguaglianza (13.3) segue in modo analogo.
Esempio 13.4. In particolare, se σ : ∆2 −→ X è un 2-simplesso singolare, allora
∂ [ℓ0 , ℓ1 , ℓ2 ]σ
=
[ℓ1 , ℓ2 ]σ − [ℓ0 , ℓ2 ]σ + [ℓ0 , ℓ1 ]σ
(cfr. 13.2)
Esempio 13.5. Se φ : {p} −→ X è una funzione costante, allora
∂ [p, p, p]φ
=
[p, p]φ − [p, p]φ + [p, p]φ
Di conseguenza, un 1-simplesso costante è un bordo.
=
[p, p]φ
(cfr. 13.3)
44
Esempio 13.6. Sia X = I/{0, 1} ∼
= S 1 , consideriamo la proiezione naturale π : ∆1 = I −→ X . I vertici
di ∆1 sono ℓ0 = 0 e ℓ1 = 1. Si ha
∂ [0, 1]π = [1]π − [0]π = 0
π = [ℓ0 , ℓ1 ]π = [0, 1]π ,
(essendo 0 = 1 in X),
quindi π rappresenta una classe di omologia. Vedremo che H1 (X) è il gruppo ciclico generato da π (cfr. 18.2).
Esempio 13.7. Sia φ : ∆1 = I −→ X un cammino, φ− la funzione φ− (t) = φ(1 − t) (il cammino
percorso in verso opposto). Allora
= . . . = [1, 0]φ + [0, 1]φ = φ− + φ
∂ [0, 1, 0]φ − [0, 0, 0]φ
i.e. φ e φ− differiscono per un bordo (pertanto, se φ compare come addendo di una classe di omologia, può
essere sostituito con −φ− ).
In particolare, se φ rappresenta
una classe di omologia, i.e. ∂ φ = 0 ciò accade se e solo se φ(0) = φ(1),
i.e. φ è un cammino chiuso , allora φ e φ− sono l’uno l’opposto dell’altro come classi di omologia.
◦
∼
◦
Anticipiamo, in dimensione 1, una definizione che daremo più avanti in generale (def. 14.4).
Sia
σ : ∆1 = [0, 1] −→ X
un 1-simplesso singolare, scriviamo σ = [0, 1]σ .
Una suddivisione di σ è una catena del tipo
[0, x1 ]σ + [x1 , x2 ]σ + ... + [xk , 1]σ ,
0 < x1 < x2 < ... < xk < 1 .
Dato σ : [0, 1] → X , calcolando il bordo del 2-simplesso degenere [0, x, 1]σ (con 0 < x < 1) si trova la
1-catena ∂ [0, x, 1]σ = [x, 1]σ − [0, 1]φ + [0, x]σ . Riscrivendo questa equazione nella forma
(13.8)
[0, 1]σ
=
[0, x]σ + [x, 1]σ
(suddivisione)
−
∂ [0, x, 1]σ
(bordo)
si evince che il simplesso σ = [0, 1]σ e la sua suddivisione [0, x]σ + [x, 1]σ coincidono a meno di un bordo.
Più in generale,
(13.9)
dato un 1-simplesso singolare σ ed una sua suddivisione ̺, esiste una 2-catena η tale che
σ = ̺ + ∂η
(questo per induzione
P sul numero dei simplessi della suddivisione ̺). Come corollario importante della (13.9)
si deduce che se
ni σi è un 1-ciclo (i.e. ha bordo nullo) allora la sua classe di omologia coincide con la
classe che si ottiene sostituendo i vari σi con delle loro suddivisioni (non si richiede affatto che questi vengano
suddivisi nello stesso modo).
Nella sezione che segue affrontiamo la questione delle suddivisioni in dimensione arbitraria e stabiliamo la già
citata Proposizione (15).
Sui simplessi singolari e loro suddivisioni
Riprendendo le notazioni della sezione precedente, siano A uno spazio reale affine, {v0 , ..., vn } un insieme
ordinato di punti di A, ⌊v0 , ..., vn ⌋ l’inviluppo convesso dei vi e Γ : ∆n −→ ⌊v0 , ..., vn ⌋ la restrizione della
trasformazione affine che ai vertici di ∆n associa ordinatamente i vi . Quanto segue introduce formalmente
l’idea intuitiva di suddivisione.
(14.1) Dati n+1 punti di uno spazio affine, diciamo che questi sono in posizione generale se non sono contenuti
in alcun sottospazio affine di dimensione n − 1 (osserviamo che questa eventualità si verifica se e solo
se la funzione Γ di cui sopra, corrispondente ai punti in questione, è un omeomorfismo).
(14.2) Una triangolazione del simplesso standard ∆n è un ricoprimento finito in insiemi Di convessi, ognuno
dei quali inviluppo convesso di n + 1 punti in posizione generale (detti vertici), i.e. del tipo Di =
⌊v0(i) , ..., vn(i) ⌋, che a due a due si intersecano nell’inviluppo convesso dei vertici in comune (nel vuoto,
se non hanno vertici in comune).
45
(14.3) Una suddivisione dell’identità (o meglio, del simplesso singolare Id : ∆n → ∆n ) è una catena del tipo
P
S(Id ) :=
ǫ i Γi
(ǫi = ±1)
dove: ∪Di è una triangolazione di ∆n ; Γi : ∆n → Di è il diffeomorfismo indotto da un ordinamento
dei vertici di Di (se ne sceglie uno per ogni i); il bordo ∂S(Id ) è supportato sulla frontiera di ∆n ,
i.e. non ha contributi interni a ∆n ; esiste i tale che ǫi o(Di ) = 1, essendo o(Di ) = ±1 := orientazione
di Di (= “segno(Γi )”).
N.b.: dalla condizione che il bordo ∂S(Id ) non abbia contributi interni a ∆n (che di seguito chiamiamo
(♣)), segue l’uguaglianza ǫi o(Di ) = ǫj o(Dj ) per triangoli Di e Dj adiacenti e, di conseguenza, che
il prodotto ǫi o(Di ) non dipende da i (per cui si avrà ǫi o(Di ) = 1, ∀ i). Osserviamo inoltre che se si
fissa un ordinamento totale per l’insieme dei vertici della triangolazione compatibile con l’ordinamento
dei vertici di ∆n , su ogni Di si considera l’ordinamento indotto ed infine si pone ǫi := o(Di ), allora
la condizione (♣) è automaticamente soddisfatta.
(14.4) La suddivisione di un n-simplesso σ : ∆n → X associata ad una suddivisione dell’identità S(Id ) è
la n-catena
P
σ♯ (S(Id )) =
ǫ i σ ◦ Γi
(i simplessi sono funzioni, se ne può prendere “l’f♯ ”, cfr. 9.1.)
Una suddivisione di una catena è la catena che si ottiene suddividendo ognuno dei suoi simplessi (non
si richiede che si usi la stessa suddivisione dell’identità per ciascuno di essi).
Al termine della sezione precedente abbiamo visto che un qualsiasi 1-simplesso singolare ed una sua qualsiasi
suddivisione differiscono per un bordo (cfr. 13.9). Per n ≥ 2 la situazione è leggermente diversa. Ad esempio,
un 2-simplesso non può essere scritto come somma di una sua suddivisione in due 2-simplessi con un bordo
(semplicemente perché il bordo di una 3-catena ha un numero pari di facce mentre 1 + 2 è dispari). D’altro
canto, se T è un triangolo di vertici a, b, c e φ : T → X una funzione, posto σ = [a, b, c] = [a, b, c]φ e
dato un punto x interno al lato a b, calcolando il bordo del 3-simplesso [a, x, b, c] si ha
∂ [a, x, b, c]
(14.5)
=
[x, b, c] + [a, x, c]
(bordo)
−
(suddivisione)
−
[a, x, b]
(degenere)
[a, b, c]
σ
e se abbiamo un 2-ciclo (= 2-catena avente bordo nullo), è ragionevole sperare che tra i suoi simplessi ce ne
sia uno, che chiameremo σ ′ , che ha anch’esso a b come lato, ma con segno “opposto”, e.g. σ ′ = [a, d, b]φ′
(per semplicità si assuma che T ed il dominio T ′ di φ′ condividano il lato a b e che, su questo, le due funzioni
φ e φ′ coincidano). Scrivendo per questo simplesso un’equazione simile alla precedente si può fare in modo
che i contributi degeneri si cancellino, si veda la figura qui sotto:
b
c
b
d
a
σ + σ′
x
c
d
c
a
[x, b, c] + [a, x, c] + σ′
non differisce da σ + σ′ per un bordo
b
x
d
a
[x, b, c] + [a, x, c] − [a, x, d] + [x, d, b]
differisce da σ + σ′ per un bordo
(si scriva il bordo di [a, x, b, c] + [a, x, d, b]). A questo punto ammettiamo che la nostra speranza era mal
riposta: non è escluso che un tale σ ′ distinto da σ possa non esistere affatto ad esempio, nell’espressione del
bordo del nostro ciclo, può accadere
che il contributo [a, b] di ∂ σ si cancelli col contributo −[a, c] , sempre di
∂ σ, i.e. che risulti φ ta + (1−t)b = φ ta + (1−t)c , ∀ 0 ≤ t ≤ 1 . Inoltre, passando a dimensione superiore
coinvolgere simplessi “adiacenti” ci mette in un ginepraio (già dividendo un tetraedro in due tetraedri, gli
altri 3-simplessi da coinvolgere saranno due, ognuno dei quali a sua volta ne coinvolgerà altri). In effetti la
situazione non è brutta come sembra, le patologie appena riscontrate spariscono tutte se, partendo da un ciclo
(= catena con bordo nullo), si assume che la sua suddivisione sia essa stessa un ciclo:
(14.6)
un n-ciclo è omologicamente equivalente ad ogni sua suddivisione che abbia bordo nullo.
Sebbene elegante, e per quanto vada nella direzione della comprensione della natura dell’omologia, quest’affermazione ha due limiti: i) non si possono suddividere arbitrariamente i singoli simplessi che costituiscono il
ciclo in questione (in generale non si otterrà un n-ciclo ma solo una n-catena); ii) è necessario avere un
risultato che concerna le catene.
La (14.6) non la utilizzeremo e, per questa ragione, solamente al termine di questa sezione (cfr. inciso 16) ne
discuteremo sia le conseguenze che i limiti i) e ii) esposti sopra.
A questo punto andiamo dritti allo scopo. Premettiamo una definizione.
46
Sia U = {Uh } un ricoprimento di uno spazio topologico X e sia C•U (X) il sottocomplesso
di C• (X) generato dai simplessi singolari supportati (def. 8) in almeno un sottospazio del
ricoprimento:
P
C•U (X) :=
ni σi ∈ C• (X) image σi ⊆ Uh per un qualche h
Si osservi che C•U (X) è effettivamente un sottocomplesso di catene di C• (X). Infatti, visto che se un simplesso
è supportato su un insieme lo sono anche le sue facce, si ha ∂ C•U (X) ⊆ C•U (X). L’obiettivo che ci si prefigge
è quello di provare che C•U (X), sotto un’ipotesi ragionevole, calcola l’omologia di X (Prop. 15). Per provare
questo risultato abbiamo bisogno delle suddivisioni delle catene.
Proposizione 15. Sia X uno spazio topologico e U = {Uh } una collezione di sottospazi i
cui interiori ricoprono X . Allora l’inclusione di complessi di catene
ι :
C•U (X)
֒→
C• (X)
è un’equivalenza omotopica. In particolare induce isomorfismi in omologia.
Gli Uh non sono necessariamente aperti, comunque si richiede che i loro interiori ricoprano X . Naturalmente
questa ipotesi è cruciale: ad esempio, se X è il ricoprimento costituito dai punti di X , il complesso C•X (X)
non ha nulla a che vedere con l’omologia di X (è costituito dai simplessi singolari costanti e pertanto ha
omologia banale in ogni grado eccetto che in grado zero dove il gruppo H0 (C•X (X)) è il gruppo abeliano libero
sui punti di X ).
Per provare la Proposizione (15) abbiamo bisogno di introdurre la suddivisione baricentrica.
Premessa 15.1. Dati dei punti in posizione generale x0 , ..., xn di uno spazio affine, una triangolazione
dell’inviluppo convesso ⌊x0 , ..., xn ⌋ (notazione 13.0) ed un punto p non contenuto nel sottospazio affine
generato dagli xi (equivalentemente, anche i punti p, x0 , ..., xn sono in posizione generale), c’è una naturale
triangolazione di ⌊p, x0 , ..., xn ⌋ ottenuta congiungendo a p la triangolazione di partenza.
Definizione 15.2. Dato D = ⌊v0 , ..., vn ⌋, con i vi in posizione generale (punti di uno spazio affine). Si
definisce la triangolazione baricentrica di D, induttivamente: per n = 0 è la triangolazione banale, per n
arbitrario si prende il baricentro di D e lo si congiunge alle triangolazioni baricentriche delle sue facce proprie
di dimensione n − 1. Essendo queste in numero uguale a n + 1, la triangolazione baricentrica di D sarà
costituita da (n + 1)! (fattoriale) n-triangoli (...si moltiplica per il numero delle facce ad ogni step). Poniamo
V = {v0 , ..., vn }.
I vertici di un n-triangolo τ della triangolazione baricentrica di D, ripercorrendo a ritroso il processo induttivo
che la definisce, sono i seguenti: w0 := “baricentro di D”; w1 := “baricentro di una faccia di D”, ovvero
il baricentro di un insieme V r {vi } di n punti di V ; w2 := “baricentro di n − 1 vertici tra i precedenti”
0
eccetera. In definitiva, c’è una corrispondenza biunivoca che consente sia di descrivere che di identificare tali
n-triangoli:
(15.3)
Ω :
Θ
−−−1:1
−−→
{ n − triangoli della suddivisione baricentrica di D }
(i0 , ..., in )
7→
⌊ bar(V ), bar(V r {vi0 }), ..., bar({vin−1 , vin }), vin ⌋
(=: ⌊w0 , ..., wn ⌋)
dove Θ denota l’insieme delle permutazioni di {0, 1, ..., n}, “bar” denota la funzione che ad un insieme
di punti associa il loro baricentro. Si noti che i vertici (tutti) della triangolazione baricentrica di D sono i
baricentri dei sottoinsiemi non vuoti dell’insieme V = {v0 , ..., vn } (in particolare, sono in numero uguale a
2n+1 − 1).
Un elemento Ω(i0 , ..., in ) non solo è un n-triangolo ma è un n-triangolo con un ordinamento dei vertici, questo
di fatto lo rende un n-simplesso singolare e permette di definire la suddivisione baricentrica del simplesso
singolare [v0 , ..., vn ] (questo, coerentemente con la notazione (13.1) e che continueremo ad usare anche nel
proseguo, è la trasformazione affine Γ : ∆n −→ D che manda ordinatamente i vertici del simplesso standard
nei vari vi ):
47
Definizione 15.4. Si definisce la suddivisione baricentrica di [v0 , ..., vn ] ponendo
P
ǫ(̟) [w0 , ..., wn ]
S([v0 , ..., vn ]) :=
̟∈Θ
dove ǫ(̟) = ±1 è il segno della permutazione ̟, i vari wi sono i vari baricentri indicati nella (15.3)
(sottolineiamo che sono funzione di ̟) e dove, come sempre, [w0 , ..., wn ] denota il simplesso singolare
∆n → ⌊w0 , ..., wn ⌋. Si definisce inoltre l’omotopia baricentrica (non è un nome dato “a caso”) di [v0 , ..., vn ]
ponendo
J([v0 ]) := 0 e definendo, induttivamente su n, J (σ) := ξσ (σ) − ξσ J ◦ ∂(σ)
dove σ = [v0 , ..., vn ] e, posto w0 := bar({v0 , ..., vn }) = “bar(σ)”, ξσ
[w0 , x0 , ..., xk ].
è l’operatore [x0 , ..., xk ] 7→
Naturalmente tutte le definizioni si intendono estese alle combinazioni lineari (sia per S che per J che per
ξσ , questo affinché J ◦ ∂ e ξσ (...) abbiano senso). Si osservi che J ha grado 1, i.e. porta n catene in n + 1
catene.
Vediamo più da vicino i casi dove n è basso:
n = 0
S([a]) = [a] ,
J([a]) = 0 .
n = 1
S([a, b]) = −[x, a] + [x, b] ,
a
J([a, b]) = [x, a, b].
x
•
b
n = 2
S([a, b, c]) =
b
−[o, x, a] + [o, x, b]
[o, z, a] − [o, z, c]
−[o, y, b] + [o, y, c]
J([a, b, c]) =
[o, a, b, c]
−[o, y, b, c]
+[o, z, a, c]
−[o, x, a, b]
y
−1
1
c
Le due figure rappresentano S. Nella seconda (caso n = 2), le frecce
tratteggiate (dove indicate) indicano l’ordine dei vertici dei vari simplessi,
il numero al centro (1 oppure −1) indica il coefficiente.
−1
z
o
1
x
−1
1
a
Un effetto della “simmetria” della costruzione, è che l’ordine dei vertici di un simplesso della suddivisione
baricentrica di σ = [v0 , ..., vn ] è definito geometricamente (Def. 15.2 e successive considerazioni). La suddivisione baricentrica S(σ) ha la peculiarità di essere esplicita ma soprattutto permette di scrivere una formula
tipo (14.5) che abbia una sorta di natura ricorsiva: i vari contributi degeneri sono i vari simplessi dei quali si
prende il bordo (a sinistra nella 14.5) delle analoghe formule in dimensione n − 1 scritte per le facce di ∆n .
Precisamente, vale la formula seguente:
(15.5)
σ
=
S(σ)
+ ∂ J(σ) +
J(∂σ)
(suddivisione)
(bordo)
(degenere)
dove S e J denotano la suddivisione baricentrica e l’omotopia baricentrica definite sopra. La (15.5) si
dimostra per induzione (si tratta di un lungo calcolo che, per quanto sia piuttosto delicato, al di là degli
aspetti combinatorici non è interessante, lo lasciamo per esercizio): nella (15.4) abbiamo due formule esplicite,
basta usarle!
Se v0 , ..., vn sono i vertici di ∆n , si ha [v0 , ..., vn ] = Id = Id∆n . Dato ora uno spazio topologico X si
possono considerare
SX (σ) := σ♯ (S(Id ))
e
JX (σ) := σ♯ (J(Id ))
essendo σ un n-simplesso singolare su X . Estendendo per linearità alle catene otteniamo due morfismi indotti
SX : C• (X) −→ C• (X)
e
JX : C• (X) −→ C• (X)
Si ha che SX ha grado 0, i.e. porta n-catene in n-catene, mentre JX ha grado 1, i.e. porta n-catene in n + 1
catene. Naturalmente la formula (15.5), che vale per i singoli simplessi, continua a valere, o meglio assume la
forma
(15.6)
IdC• (X) − SX = ∂ ◦ JX + JX ◦ ∂
Questa formula ci dice che l’operatore di suddivisione è omotopo all’identità su C• (X) (§A2, 10). L’operatore
JX è l’omotopia di complessi, per questa ragione nella (15.4) abbiamo chiamato l’operatore J “omotopia
baricentrica”.
48
Dimostrazione (della Proposizione 15). Cosı̀ come SX è omotopo all’identità (formula 15.6), anche le sue
m
potenze SX
: C• (X) → C• (X) sono omotope all’identità (§A2, 10.2), quindi esiste Jm : C• (X) → C• (X)
soddisfacente
m
IdC• (X) − SX
(♠)
=
∂ ◦ Jm + Jm ◦ ∂ .
Ora entra in gioco il ricoprimento U. L’obiettivo22 è il seguente:
definire un inverso omotopico SU : C• (X) → C•U (X) dell’inclusione di complessi i : C•U (X) → C• (X)
(cfr. §A2, 12). Definiremo SU in modo che risulti
SU ◦ i = IdC U (X)
•
e
i ◦ SU
∼omotopo
IdC• (X)
(cfr. §A2, 10.1).
Essendo i un’inclusione, ciò equivale a definire un morfismo SU : C• (X) → C• (X) che sia una proiezione
su C•U (X) (i.e. soddisfi Im SU ⊆ C•U (X) e SU (σ) = σ , ∀ σ ∈ C•U (X)) e che soddisfi la condizione
IdC• (X) − SU
(♠U )
=
∂ ◦ JU + JU ◦ ∂ .
La questione è algebrica. Per ogni n-simplesso σ definiamo
k
m(σ) := min k ∈ N | SX
(σ) ∈ C•U (X)
(l’esistenza di un tale minimo è assicurata dal lemma di Lebesgue §0, 5.1, affinché lo si possa applicare si
osservi che partendo da un qualsiasi n-triangolo in Rn , il massimo dei diametri degli n-triangoli che si
ottengono iterando la suddivisione baricentrica converge a zero). Poniamo JU (σ) = Jm(σ) (σ) ed infine
m(σ)
+ “correttivo(σ)” dove “correttivo(σ)” := Jm(σ) (∂σ) − JU (∂σ) serve a fare in modo che
SU (σ) = SX
effettivamente sia soddisfatta la condizione (♠U ) (essendo m funzione del simplesso, (♠U ) non funzionerebbe
senza il termine correttivo: nel termine JU ◦ ∂ gli m delle facce di σ possono essere minori di m(σ)).
Un corollario importante della Proposizione (15) è la successione esatta lunga di Mayer-Vietoris. Questa la
vedremo nella prossima sezione. Concludiamo questa sezione con alcune considerazioni che, sebbene non le
utilizzeremo mai, ci sembrano interessanti (come promesso, queste considerazioni riguardano anche limiti e
conseguenze della (14.6)).
Inciso 16. Tornando alla (14.6), affinché la si possa utilizzare, è importante stabilire la proprietà che segue:
(♣)
ogni ciclo σ ammette suddivisioni con bordo nullo “sufficientemente fini”
(dove “sufficientemente fini” significa “i cui simplessi sono supportati sugli aperti di un ricoprimento fissato a
priori”). Infatti, mettendo insieme la (14.6) con la proprietà (♣) si deduce immediatamente quanto segue:
dato uno spazio topologico ed un ricoprimento aperto, per ogni classe di omologia è possibile trovarne
(16.1)
un rappresentante con ogni n-simplesso singolare supportato su un aperto del ricoprimento
i.e., nella notazione che precede la Prop. 15, ogni classe di omologia ammette un rappresentante in C•U (X) .
La proprietà (♣) sappiamo essere vera: come abbiamo visto le potenze della suddivisione baricentrica sono
sufficientemente fini. Anzi, in effetti vale molto di più: fissato un ciclo σ ed una sua suddivisione arbitraria
esiste un raffinamento di quest’ultima avente bordo nullo (questo giusto per dire che di suddivisioni aventi
bordo nullo ne troviamo a iosa). Da questo punto di vista, avremmo potuto evitare di parlare della suddivisione
baricentrica.
Il vero problema è che la (16.1) ci dice solamente che l’inclusione di complessi di catene C•U (X) ֒→ C• (X)
induce morfismi suriettivi in omologia (cfr. esercizio §A2, 8.3). La Proposizione (15) è molto più forte: ci dice
che tali morfismi indotti provengono da un’equivalenza omotopica, in particolare sono isomorfismi.
Tornando ai limiti i) e ii) della (14.6) (si veda sopra), a costo di apparire ripetitivi diciamo che il primo
in realtà non rappresenta un problema: sebbene le suddivisioni arbitrarie non vadano bene, di suddivisioni
“buone” ce ne sono più che a sufficienza. Il secondo invece effettivamente è un limite della (14.6): se non si
lavora con le catene non si riesce ad andare oltre la (16.1) e, in definitiva, non si riesce a provare l’iniettività
dei morfismi indotti in omologia dall’inclusione di complessi di catene C•U (X) ֒→ C• (X).
m di S , purtroppo m dipende dalla catena in questione,
Ogni catena in C• (X) viene mandata in C•U (X) da una potenza SX
X
m
altrimenti il fatto che SX è omotopo all’identità (§A2, 10.2) permetterebbe di concludere rapidamente.
22
49
Successione di Mayer-Vietoris
Come applicazione importante della Proposizione (15) si ottiene la successione esatta lunga
di Mayer-Vietoris. Sia X uno spazio topologico, A e B due sottospazi i cui interiori
ricoprono X, sia U = {A, B}. Allora, la successione esatta corta di complessi23
0
−−−→
(17)
j
C• (A ∩ B)
−−−→
C• (A) ⊕ C• (B)
σ
7→
(σ, −σ)
(α, β)
−−−→
q
C•U (X)
7→
α+β
−−−→
0
induce una successione esatta lunga in omologia (lemma §A2, 9) che, grazie all’equivalenza
omotopica di complessi di catene C•U (X) ≃ C• (X) asserita dalla Proposizione (15), può
essere scritta nella forma
(18) . . . −→ Hn (A ∩ B) −→ Hn (A) ⊕ Hn (B) −→ Hn (X) −→ Hn−1 (A ∩ B) −→ . . .
(successione di Mayer-Vietoris).
Ricordiamo che l’ipotesi che gli interiori dei due sottospazi A e B ricoprano X è cruciale ai fini del lemma (15)
e, di conseguenza, lo è anche ai fini della successione di Mayer-Vietoris.
Concludiamo questa sezione con una facile applicazione della successione di Mayer-Vietoris. A tale fine abbiamo
bisogno di anticipare un risultato che vedremo nella prossima sezione:
L’equivalenza omotopica di spazi topologici induce isomorfismi in omologia.
In particolare, se un sottospazio è un retratto di deformazione di uno spazio X , allora l’inclusione di quel
sottospazio in X induce isomorfismi in omologia. Consideriamo il cerchio unitario S 1 e la composizione
I : I −→ S 1 ,
(18.1)
t 7→ (cos 2πt, sin 2πt).
Consideriamo un ricoprimento di S 1 costituito da due aperti contraibili, e.g. A = S 1 r {(0, −1)}, B =
S 1 r {(0, 1)}. Gli spazi A e B si retraggono ad un punto, lo spazio A ∩ B, essendo costituito da due
componenti connesse ognuna delle quali contraibile, si retrae ad una coppia di punti. Per quanto anticipato
abbiamo
Hi (A) = Hi (B) = Hi (A ∩ B) = 0 , i ≥ 1 ; H0 (A) ∼
= Z⊕Z
= Z , H0 (A ∩ B) ∼
= Z , H0 (B) ∼
(gli isomorfismi sono naturali, solo per quel che riguarda l’ultimo dobbiamo decidere in quale ordine scrivere le
due componenti di A∩B). Tenendo conto di come sono definiti i vari morfismi, la successione di Mayer-Vietoris
è la successione
Hi (A) ⊕ Hi (B)
= 0
−→ Hi (S 1 )
−→ Hi−1 (A ∩ B) ...
= 0
(qui a sinistra, i
≥ 2)
j
q
δ
⋆
⋆
... H1 (A) ⊕ H1 (B) −→ H1 (S 1 ) −→
H0 (A ∩ B) −→
H0 (A) ⊕ H0 (B) −→
H0 (S 1 ) −→ 0
∼
∼
∼
= 0
= Z⊕Z
= Z⊕Z
= Z
(r, s)
7→
(r + s, −r − s)
(h, k)
7→
h+k
Ne segue che risulta Hi (S 1 ) = 0 , ∀ i ≥ 2, nonché H1 (S 1 ) ∼
= Z (n.b. il primo isomorfismo è
= kerj⋆ ∼
indotto da δ, in particolare è naturale). I punti o = (1, 0) e p = (−1, 0) sono punti nelle due componenti di
A ∩ B, le corrispondenti classi di omologia generano il gruppo H0 (A ∩ B) , mentre il gruppo ker j⋆ è generato
dalla classe di o − p. Ricordando com’è definito il morfismo di incollamento δ si può verificare che risulta
δ(I) = o − p (cfr. esercizio 18.3). Riassumendo, δ(I) = o − p genera ker j⋆ e, di conseguenza, abbiamo
(18.2)
H1 (S 1 ) ∼
= Z ed I ne è un generatore
(ciò giustifica la notazione). Il generatore I (def. 18.1) è il cosiddetto generatore canonico di H1 (S 1 ).
23
Ci si convinca dell’esattezza della successione (17).
50
Esercizio 18.3. Si verifichi che risulta δ(I) = o − p.
Suggerimento: la successione di Mayer-Vietoris è stata scritta modulo l’omotopia di complessi di catene
U = {A, B}
C•
(S 1 )
≃
C• (S 1 )
data dall’inclusione. Come primo passo si rappresenti la classe di omologia di I in C1U (S 1 ) (a tal fine
consigliamo di osservare che nella notazione (13.1) risulta I = [0, 1]I = [0, 21 ]I + [ 21 , 1]I − ∂ [0, 12 , 1]I ,
che la 0-catena σ := [0, 12 ]I + [ 21 , 1]I è in C1U (S 1 ) e rappresenta la stessa classe di omologia di I). Si
calcoli esplicitamente δ(σ) usando la descrizione (§A2, 9.1) del morfismo di incollamento (n.b. nel complesso
al centro si ha ∂ σ = (p − o, o − p)) e si verifichi che risulta δ(σ) = o − p (notazioni come sopra).
Invarianza Omotopica
Quanto visto nelle due sezioni precedenti concerne le suddivisioni dei simplessi, in questa sezione diamo un
risultato, il lemma (19), che invece concerne l’omotopia di funzioni e, in un certo senso, le deformazioni delle
catene. Date due funzioni f, g : X → Y , un’omotopia H : X × I −→ Y (cfr. §2, 1) ed un n-simplesso
singolare σ : ∆n −→ X , possiamo considerare la composizione
φσ :
∆n × I
σ×Id
−−−−→
H
X ×I
−−−→
Y
I due n-simplessi φ(0)
: ∆n → Y, z 7→ φ(z, 0) e φ(1)
: ∆n → Y, z 7→ φ(z, 1), sono rispettivamente f♯ (σ)
σ
σ
e g♯ (σ). Passando a combinazioni lineari formali, tutto ciò si estende alle catene. Essendo ∆n × I contenuto
in uno spazio affine, dato un qualsiasi sottoinsieme di punti {x0 , ..., xk }, ha senso il corrispondente simplesso
[x0 , ..., xk ]φ (cfr. 13.1). Triangolando ∆n × I in modo opportuno si può provare che
P
P
P
un n-ciclo
ni σi ∈ C• (X) induce n-cicli
ni φ(0)
,
ni φ(1)
∈ C• (Y ) che differiscono per un bordo
σ
σ
i
i
(si noti che quando X =PY ed H(x, 0) è l’identità stiamo deformando con continuità un ciclo), i.e. f∗ e g∗
mandano il nostro ciclo
ni σi nella stessa classe di omologia. Più precisamente vale il lemma che segue:
Lemma 19. Funzioni f , g : X −→ Y omotope (cfr. §2, 1) inducono morfismi di complessi
di catene omotopi e, di conseguenza, inducono lo stesso morfismo in omologia:
f ∼∅ g
=⇒
∼
f♯
=⇒
g♯
f⋆
=
g⋆
(omotopia di complessi di catene)
In particolare, il morfismo f⋆ dipende solo dalla classe d’omotopia della funzione f .
Dimostrazione. Abbiamo due morfismi di complessi di catene f♯ e g♯
. . . −→ Cn (X)
f♯
y yg♯
. . . −→
Cn (Y )
∂
n
−→
∂
n
−→
Cn−1 (X)
f♯
y yg♯
Cn−1 (Y )
−→ . . . −→
−→ . . . −→
C2 (X)
f♯
y y g♯
C2 (Y )
∂
2
−→
∂
2
−→
C1 (X)
f♯
y yg♯
C1 (Y )
∂
1
−→
∂
1
−→
C0 (X) −→ 0
f♯
y y g♯
C0 (Y )
−→ 0
La dimostrazione si divide in due parti:
Step 1. I due morfismi di complessi di catene f♯ e g♯ risultano omotopi (cfr. Def. §A2, 10). Per provare
questa affermazione si devono costruire morfismi Jn : Cn (X) → Cn+1 (Y ) come nella definizione (§A2, 10).
Sia H : X × I → Y l’omotopia f ∼∅ g. Siano v0 , ..., vn i vertici del simplesso standard ∆n e sia
(t)
vi := (vi , t) ∈ ∆n × I, dato un n-simplesso σ in X definiamo una n-catena in Y ponendo (qui sotto la
notazione è quella definita nella 13.1):
n
P
(1)
(1)
(0)
(0)
(−1)j+1 [v0 , ..., vj , vj , ..., vn ]φ = σ×Id ◦H ∈ Cn+1 (Y )
J(σ) :=
σ
j =0
(di fatto, si triangolarizza ∆n × I ). Otteniamo i morfismi desiderati Jn : Cn (X) −→ Cn+1 (Y ) estendendo
la definizione per linearità e facendo variare n. Nella stessa notazione, sempre per un n-simplesso σ in X ,
abbiamo
(0)
(0)
(1)
(1)
f♯ (σ) = [v0 , ..., vn ]φ ,
g♯ (σ) = [v0 , ..., vn ]φ
σ
σ
51
A questo punto si verifica che siamo nelle ipotesi del Teorema (§A2, 11), ovvero che risulta
f♯ (σ) − g♯ (σ)
=
∂ ◦ J(σ) + J ◦ ∂(σ)
(si tratta di un calcolo, per quanto lungo e noioso, abbastanza elementare, lo lasciamo per esercizio).
Step 2. Essendo f♯ e g♯ omotopi, la tesi che si vuole provare segue dal Teorema (§A2, 11) (si noti che
quest’ultimo è un risultato puramente algebrico).
Il corollario che segue ci dice che la classe d’omotopia di uno spazio topologico è un invariante omologico
...risultato che dovrebbe essere stato già intuito da chi ha svolto l’esercizio (12)!
Corollario 19.1.
isomorfi.
Spazi omotopicamente equivalenti (cfr. §2, 1.5) hanno gruppi d’omologia
In particolare, se X è uno spazio contraibile, allora è aciclico (cfr. Definizione 11 e Esercizio 11.1):
H0 (X) = Z ,
Hk (X) = 0 , ∀ k ≥ 1 .
Ad esempio, l’n-simplesso standard ∆n ha la stessa omologia del punto (è aciclico).
Dimostrazione. Siano f ed h come nella definizione (§2, 1.5). Si ha
h⋆ ◦ f⋆ = (h ◦ f )⋆ = (IdX )⋆ = IdH• (X)
nonché
f⋆ ◦ h⋆ = (f ◦ h)⋆ = (IdY )⋆ = IdH• (Y )
pertanto i morfismi f⋆ ed h⋆ sono l’uno l’inverso dell’altro, in particolare sono isomorfismi.
52
Il Teorema di Hurewicz
L’invarianza omotopica dell’omologia (cfr. Lemma 19) permette di mettere in relazione il
gruppo fondamentale (Def. §2, 4) col primo gruppo d’omologia (teorema di Hurewicz 21).
Poiché ∆1 = I, un cammino γ : I → X (Def. §2, 3) è anche una 1-catena. Se gli estremi iniziale e finale
di γ coincidono, il bordo della 1-catena γ è nullo e di conseguenza γ definisce una classe in omologia. Per il
lemma (19) tale classe d’omologia dipende esclusivamente dalla classe d’omotopia (cfr. precisazione 20.1 sotto)
di γ e, di conseguenza, la funzione (per ora solo di insiemi)
Υ :
(20)
π1 (X, x0 )
−−−→
H1 (X)
che ad un cammino in π1 (X, x0 ) associa la classe d’omologia di cui sopra è ben definita.
γ
Precisazione 20.1. Attenzione! Sebbene nel lemma (19) si richieda solamente che f e g
I −−−−→ X
siano omotope rispetto al vuoto, nel nostro caso è necessario che l’omotopia mantenga
րω
Iց
l’estremo iniziale uguale a quello finale. In effetti abbiamo glissato su come applicare il
1
lemma (19) correttamente, ecco come: si definisce ω cosı̀ da avere γ = ω ◦I (cfr. figura),
S
essendo I il generatore canonico di H1 (S 1 ) (cfr. 18.1), e si osserva che per ragioni
tautologiche la classe di omologia definita sopra a chiacchiere è la classe ω⋆ (I), quindi si applica il lemma (19)
alla funzione ω (n.b.: la classe d’omotopia di ω è di fatto la classe d’omotopia di γ che mantiene gli estremi
iniziale e finale coincidenti); in formule (γ e γ ′ denotano cammini omotopi, ω e ω ′ sono definiti come sopra):
γ ∼{0, 1} γ ′
=⇒
ω ∼ ω′
=⇒
ω⋆ (I) = ω⋆′ (I) , i.e. Υ(γ) = Υ(γ ′ ) .
(Lemma 19)
Vista l’importanza, scriviamo un conto diretto esplicito che ci dà una seconda dimostrazione del fatto che Υ
è ben definita:
c
γ′
d
se γ e γ ′ sono cammini omotopi ed H : I × I −→ X è l’omotopia γ ∼ γ ′ ,
rappresentando il dominio di H come in figura, nella notazione (13.1) abbiamo
γ = [a, b]H ,
x0
a
x0
γ
b
γ ′ = [c, d]H ,
x0 = [a, c]H = [b, d]H (cammino costante)
e risulta (cfr. formula 13.3)
∂ [a, b, c]H − [b, c, d]H
= [b, c]H − x0 + γ − γ ′ + x0 − [b, c]H
= γ − γ ′.
Ciò prova che γ e γ ′ differiscono per un bordo, i.e. rappresentano la stessa classe di
omologia.
Come vedremo tra poco (teorema di Hurewicz), la funzione Υ dà un’identificazione naturale dell’abelianizzato
del primo gruppo d’omotopia col primo gruppo d’omologia. Premettiamo un lemma:
Lemma 20.2. La funzione Υ è un morfismo di gruppi.
Dimostrazione. Per come è definito il prodotto di cammini (§2, def. 3), posto γ := γ1 ∗ γ2 nella nella
notazione fondamentale (13.1) risulta
γ = [0, 1]γ ,
γ1 = [0, 21 ]γ
e
γ2 = [ 12 , 1]γ
(sono uguaglianze di funzioni da ∆1 = I ad X, vale la pena ribadire che cammini e 1-simplessi singolari
sono la stessa cosa). Tenendo presente che la funzione Υ consiste nel prendere la classe d’omotopia di un
cammino e mandarla nella classe di omologia che rappresenta quello stesso cammino (ora visto come simplesso
singolare), possiamo scrivere24
Υ(γ1 ∗ γ2 ) = [0, 1]γ ,
Υ(γ1 ) = [0, 21 ]γ ,
Υ(γ2 ) = [ 21 , 1]γ .
Ciò prova l’uguaglianza Υ(γ1 ∗ γ2 ) = Υ(γ1 ) + Υ(γ2 ) perché, come sappiamo (cfr. 13.9), un 1-simplesso
singolare ed una sua suddivisione differiscono per un bordo (nella specifico, l’1-simplesso singolare [0, 1]γ e
la sua suddivisione [0, 12 ]γ + [ 12 , 1]γ differiscono per un bordo, cfr. 13.8).
24
Per non appesantire inutilmente la notazione, utilizziamo lo stesso simbolo per un cammino e la classe d’omologia che esso
rappresenta.
53
Sia γ un cammino di estremi x0 e sia γ − il cammino γ − (t) = γ(1−t) (questo, come sappiamo, è l’inverso
omotopico di γ ). Posto x0 = “cammino costante” (§2, 4.1), si ha quanto segue
(20.3)
0
=
Υ(x0 )
=
Υ(γ ∗ γ − )
Υ(γ) + Υ(γ − )
=
γ − = −γ
=⇒
∈
H1 (X)
(qui a destra i cammini sono visti come classi d’omologia).
In effetti quanto sopra già lo sapevamo dalla formula dell’esempio (13.7), formula che peraltro esprime un
risultato più forte:
(20.4) se γ è un cammino (estremi arbitrari, anche distinti), allora −γ e γ − differiscono per un bordo.
Teorema 21 (di Hurewicz). Sia X uno spazio connesso per archi. Il morfismo naturale di
gruppi
Υ : π1 (X, x0 ) −−−→ H1 (X)
è suriettivo ed il suo nucleo è costituito dal sottogruppo dei commutatori di π1 (X, x0 ).
Di conseguenza, il primo gruppo d’omologia H1 (X) è l’abelianizzato del gruppo fondamentale. Quanto
all’ipotesi che X sia connesso per archi, ricordiamo che il gruppo fondamentale vede solamente la componente connessa per archi contenente il punto x0 , mentre l’omologia è la somma diretta delle omologie delle
varie componenti connesse per archi di X (Oss. 7.1). Da qui è chiaro il perché dell’ipotesi che X non abbia
componenti connesse per archi oltre quella contenente il punto x0 .
Dimostrazione. Abbiamo già visto che Υ è ben definita e che è un morfismo di gruppi. Resta da provare
che Υ è suriettiva e che risulta ker Υ = “commutatori di π1 (X, x0 )” (si osservi che l’inclusione “⊇” segue
immediatamente dal fatto che H1 (X) è un gruppo abeliano). Fissiamo, una volta per tutte, un cammino ξ x
da x0 ad x, per ogni x ∈ X (la famiglia degli ξ potrà essere discontinua); nel fissarli, scegliamo ξ x0 = x0
(cammino costante). Proviamo la suriettività di Υ. Per la (20.4), una classe σ ∈ H
1 (X) ammette un
P
rappresentante dove i coefficienti sono tutti uguali a +1, i.e. un rappresentante del tipo
σi (essendo i σi
cammini, non necessariamente distinti). Risulta
P
P
P
σ =
σi =
ξσ (0) + σi − ξσ (1) =
ξσ (0) + σi + ξσ−(1)
i
i
i
i
Infatti, poiché σ ha bordo nullo, i termini che abbiamo aggiunto si cancellano (risulta σi (1) = σj(i) (0), ∀ i,
essendo j una qualche permutazione degli indici). Quanto alla terza uguaglianza, usiamo di nuovo la (20.4).
Questa scrittura ha il vantaggio che ogni terna tra parentesi è suddivisione di (quindi omologa a) un cammino
con estremo iniziale e finale x0 e, come tale, è nell’immagine di Υ. Essendo Υ un morfismo di gruppi, anche
la somma di tali terne è nella sua immagine. Proviamo che il nucleo di Υ contiene solamente i cammini
che appartengono al sottogruppo dei commutatori. Sia γ un cammino di estremi x0 . Assumere che risulti
Υ(γ) = 0 ∈ H1 (X) significa poter scrivere γ come bordo, i.e. poter scrivere
P
(♠)
γ =
± ∂ ϑi ∈ C1 (X)
(nell’espansione dell’espressione a destra si cancellano tutti i singoli contributi tranne uno, che coincide con γ).
Ora, usando la (20.3) scriviamo ogni termine ±∂ϑi come “perimetro”, cosı̀ da avere ±∂ϑi = λi + µi + νi ,
precisamente, se εi è il segno ±1 in (♠),
λ := [ℓ1 , ℓ2 ]ϑ , µ := [ℓ2 , ℓ0 ]ϑ , ν := [ℓ0 , ℓ1 ]ϑ ,
se εi = 1
per ϑ = ϑi poniamo
λ := [ℓ0 , ℓ2 ]ϑ , µ := [ℓ2 , ℓ1 ]ϑ , ν := [ℓ1 , ℓ0 ]ϑ ,
se εi = −1 .
Quindi consideriamo il prodotto di cammini (cfr. def. §2, 3)
i
h
∗ ...
(21.1) ω
:=
... ∗
ξλ (0) ∗ λi ∗ ξλ−(1) ∗ ξµ (0) ∗ µi ∗ ξµ−(1) ∗ ξν (0) ∗ νi ∗ ξν−(1)
i
i
i
i
i
i
Affermiamo che questo prodotto soddisfa le proprietà che seguono (cosa che conclude la dimostrazione):
i) ogni “termine” (:= espressione in una parentesi tonda) è un cammino di estremi x0 ;
ii) è omotopo al cammino costante x0 ;
iii) a meno di un riordino dei “termini” è omotopo al cammino γ
La ii) segue dalla (§2, 4.1) e dall’esercizio (§2, 4.7): ogni prodotto tra quadre “[ . . . ]” è omotopicamente
banale. La iii) segue dal fatto che, per come sono stati definiti i vari λ, µ, ν , l’uguaglianza (♠) si traduce
nel fatto che tra i vari termini nell’espressione a destra della (21.1) c’è x0 ∗ γ ∗ x0 ∼ γ e che, per ogni altro
−
termine ξ ∗ α ∗ ξ ′ , da qualche parte c’è il suo inverso omotopico ξ ′ ∗ α− ∗ ξ − .
54
Omologia della coppia.
Sia X uno spazio topologico ed A un suo sottospazio arbitrario, denotiamo con j : A ֒→ X
l’inclusione. Il morfismo di complessi indotto j♯ : C• (A) −→ C• (X) è chiaramente iniettivo,
il complesso quoziente C• (X, A) :=
C• (X)
C• (A)
viene detto complesso della coppia (def. 23).
Ricordiamo che, per definizione di complesso quoziente, il complesso C• (X, A) è il gruppo graduato quoziente,
n (X)
i.e. Cn (X, A) = C
Cn (A) , con l’operatore di bordo indotto da quello di C• (X) (cfr. §A2).
Def. 23. Sia X uno spazio topologico, A ⊆ X un sottospazio. Il complesso della coppia
(X, A) è il complesso quoziente
C• (X, A)
C• (X)
C• (A)
:=
.
L’omologia della coppia (X, A) è l’omologia del complesso della coppia, cioè
Hn (X, A)
:=
Hn C• (X, A)
,
n ∈ N.
Una conseguenza immediata dell’iniettività di j♯ e delle definizioni è che c’è una successione esatta corta di
complessi
(23.1)
0
−−−→
j♯
−−−→
C• (A)
C• (X)
π
−−−−→
−−−→
C• (X, A)
0
Per il Lemma (§A2, 9) c’è una successione esatta lunga in omologia detta successione esatta della coppia
(24)
j⋆
π
δ
⋆
... −−−→ Hn (A) −−−→ Hn (X) −−−→
Hn (X, A) −−−→ Hn−1 (A) −−−→ ...
dove δ è il morfismo di incollamento (cfr. Nota §A2, 9.1). Per il teorema di omomorfismo di gruppi abbiamo
(24.1)
Hn (X, A)
:=
n
n
ᾱ ∈
∂ β̄
Cn (X)
Cn (A)
β̄ ∈
∂ ᾱ = 0
Cn+1 (X)
Cn+1 (A)
o
o
=
α ∈ Cn (X)
|
∂ α ∈ j♯ Cn−1 (A)
∂ Cn+1 (X) + Cn (A)
i.e. l’omologia della coppia (X, A) è data dalle catene in X con bordo supportato in A modulo catene in A
e bordi di catene in X . Quanto al morfismo δ della successione esatta (24), interpretando la descrizione del
morfismo di incollamento (cfr. §A2, 9.1) abbiamo δ[α] = [j♯−1 ∂ α] (attenzione: il “∂” che compare a destra
è il bordo di catene in X ).
Osservazione 25. Dato uno spazio topologico X , risulta25
C• (X) = C• (X, ∅) ,
quindi
Hn (X) = Hn (X, ∅) , ∀ n .
Ciò consente di vedere l’omologia di uno spazio topologico X come l’omologia di una coppia, precisamente
della coppia (X, ∅).
La Proposizione (9) si generalizza alle coppie: date (X, A) ed (Y, B), una funzione continua f : X −→ Y
soddisfacente f (A) ⊆ B induce un morfismo di complessi
(25.1)
f♯ :
C• (X, A) −−→ C• (Y, B)
e pertanto (cfr. §A2, 8.1) induce dei morfismi in omologia
(25.2)
f⋆ :
Hn (X, A) −−−→ Hn (Y, B)
Una funzione f come sopra la chiameremo morfismo di coppie, scriveremo f : (X, A) −→ (Y, B). Come nel
caso dei morfismi di spazi topologici, per un morfismo di coppie f denoteremo sempre con f♯ il corrispondente
morfismo di catene e con f⋆ il morfismo indotto in omologia (cfr. Notazione 9.3).
25
L’insieme dei simplessi a valori nell’insieme vuoto ∅ è esso stesso vuoto ed il gruppo abeliano
libero sul vuoto è il gruppo banale.
Di conseguenza, il complesso C• (∅) è il complesso nullo e risulta C• (X, ∅) := C• (X) C• (∅) = C• (X) .
55
e n (X), è
Inciso 26. L’omologia ridotta di uno spazio topologico X , i cui gruppi vengono denotati con H
definita come l’omologia del cosiddetto complesso aumentato
e• (X)
C
:=
deg
... −→ C3 (X) −→ C2 (X) −→ C1 (X) −→ C0 (X) −−→ Z
ottenuto dal complesso
CP
• (X) sostituendo il gruppo zero in grado −1 col gruppo Z, essendo l’ultimo morfismo
P
il grado: deg
ni pi =
ni . Assumendo X non vuoto,
l’omologia ridotta coincide con l’omologia singolare nei gradi strettamente positivi e, in grado zero,
detto in termini intuitivi, presenta “una copia in meno di Z”.
Quando si considera l’omologia ridotta è consuetudine assumere X non-vuoto
per evitare omologia non-zero
in grado −1 la definizione dà H−1 (∅) = Z , Hi (∅) = 0, ∀ i 6= −1 .
C’è qualche piccolo vantaggio nel considerare l’omologia ridotta. Quanto alla sua relazione con l’omologia
e• (X) −→ C• (X) (si noti che l’inclusione
singolare osserviamo che c’è una proiezione naturale di complessi C
e
naturale C• (X) −→ C• (X) non è un morfismo di complessi, l’ultimo quadrato non commuta!) e che dato
X non vuoto e fissato un punto x ∈ X , posto Zx := H0 ({x}), ci sono due successioni esatte corte
deg
e 0 (X) −→ H0 (X) −−→
0 −→ H
Z −→ 0
e
0 −→ Zx −→ H0 (X) −→ H0 (X, {x}) −→ 0
(entrambe naturali, la seconda dipende da x). Cioè l’omologia ridotta appare in modo naturale come sottogruppo dell’omologia, la scelta di un punto x (o meglio, di una componente connessa per archi di X)
consente di vederla come quoziente: l’identificazione naturale Zx ∼
= Z determina uno splitting della succese 0 (X) (per esercizio).
sione esatta corta di sinistra e consente di scrivere un isomorfismo H0 (X, {x}) ∼
= H
Nota 26.1. La (23.1) può essere scritta nella forma
e• (A) −−−→ C
e• (X) −−−→ C• (X, A) −−−→ 0 ,
0 −−−→ C
e• (X) C
e• (A) = C• (X) C• (A) =: C• (X, A) Z/Z è il gruppo nullo: il quoziente di
questo perché C
complessi aumentati coincide col quoziente ordinario . Di conseguenza, la successione esatta della coppia (24)
può essere scritta nella forma
e n (A) −−−→ H
e n (X) −−−→ Hn (X, A) −−−→ H
e n−1 (A) −−−→ ...
... −−−→ H
Teorema 27 (Escissione).
◦
Sia X uno spazio topologico. Si abbia Z ⊆ A ⊆ X con
Z ⊆ A. Allora
j⋆ : Hn (X r Z, A r Z) −−−→ Hn (X, A)
è un isomorfismo, ∀ n .
Nel Teorema, j : (X rZ, ArZ) −→ (X, A) denota l’inclusione di coppie.
Dimostrazione. Posto B = X r Z , si ha che U = {A, B} è un ricoprimento di X in sottospazi i cui interiori
ricoprono anch’essi X . Osserviamo che (X r Z, A r Z) = (B, A ∩ B). C’è un diagramma commutativo di
complessi di catene
C• (B, A ∩ B)
q
y
0
0
−−−−→ C• (A) −−−−→ C•U (X) −−−−→ C•U (X)C• (A) −−−−→
ϕ
=
ι
y
y
y
−−−−→ C• (A) −−−−→ C• (X) −−−−→
C• (X, A)
−−−−→
0
0
Essendo ι un’equivalenza omotopica di complessi di catene (cfr. Proposizione 15) si ha che ϕ induce un
isomorfismo in omologia. Infatti, il lemma dei cinque (§A2, 15), o meglio il suo corollario (§A2, 15.1), ci
dice che ϕ⋆ deve essere un isomorfismo in ogni grado. D’altro canto q è un isomorfismo per il teorema di
omomorfismo di gruppi, infatti i gruppi C• (B, A ∩ B) e C•U (X)C• (A) si identificano entrambi col gruppo
abeliano libero sui simplessi di B non contenuti in A (in particolare si identificano tra loro). Infine, la
composizione ϕ ◦ q è esattamente il morfismo j♯ e, di conseguenza, j⋆ è un isomorfismo.
L’omologia della coppia e l’escissione vengono utilizzate per il calcolo dell’omologia degli spazi ottenuti contraendo sottospazi chiusi, un esempio significativo è quello della sfera S n ottenuta dal disco Dn contraendo
il suo bordo.
56
Corollario 28. Sia X uno spazio topologico e Z ⊆ X un sottoinsieme chiuso non vuoto,
X/Z lo spazio quoziente e π : X → X/Z la proiezione naturale. Se Z è un retratto di
deformazione di un suo intorno aperto U allora il morfismo
e n (X/Z)
π
e⋆ : Hn (X, Z) −−−→ H
è un isomorfismo per ogni n.
Quanto alla notazione utilizzata: lo spazio quoziente X/Z è lo spazio ottenuto contraendo Z (cfr. Def. §0, 2.3);
il morfismo π
e⋆ denota la composizione
π⋆
e n (X/Z),
Hn (X/Z, {z}) ∼
π
e⋆ : Hn (X, Z) −→
= H
dove z denota il punto di X/Z sul quale si contrae Z, per abuso di notazione π denota (anche) il morfismo
di coppie π : (X, Z) → (X/Z, {z}) ed infine quello a destra è l’isomorfismo dell’inciso (26).
Sotto le ipotesi del corollario (28), i.e. che Z sia chiuso, non-vuoto, retratto di deformazione di un suo intorno
aperto, e come conseguenza del corollario stesso, la successione esatta della coppia (24) può essere scritta nella
forma
(28.1) ...
−−−→
Hn (Z)
j⋆
−−−→
π
−−−⋆−→
Hn (X)
e n (X/Z)
H
δ
−−−→
Hn−1 (Z)
−−−→
...
dove, ad essere rigorosi, per n = 0 sulla freccia al centro ci sarebbe dovuto essere scritto s ◦ π⋆ invece di π⋆ ,
e 0 (X/Z) lo splitting dell’inclusione naturale H
e 0 (X/Z) ֒→ H0 (X/Z) associato al
essendo s : H0 (X/Z) → H
punto z (cfr. inciso 26).
Esercizio. Sia X uno spazio topologico e Z ⊆ X un sottoinsieme chiuso non vuoto. Verificare che gli aperti
di X/Z sono le immagini degli aperti di X contenenti Z oppure aventi intersezione vuota con Z . Inoltre,
la proiezione naturale π : X → X/Z è chiusa (porta chiusi in chiusi), in particolare {z} è chiuso.
Dimostrazione (del cor. 28).
diagrammi commutativi
Hn (X, Z)
π⋆
y
Hn (X/Z, {z})
ω
−−−−→
̟
−−−−→
Sia q : (X, U ) −→ (X/Z, U/Z) la proiezione di coppie. Ci sono due
Hn (X, U )
q
y⋆
Hn (X r Z, U r Z)
∼
=y
Hn (X/Z r {z}, U/Z r {z})
Hn (X/Z, U/Z)
∼
=
−−−−−−→
escissione
∼
=
−−−−−−→
escissione
Hn (X, U )
q
y⋆
Hn (X/Z, U/Z)
La proiezione (X r Z, U r Z) −→ Hn (X/Z r {z}, U/Z r {z}) è un omeomorfismo di coppie, di conseguenza
dal diagramma di destra si evince che q⋆ è un isomorfismo. I morfismi ω e ̟ sono isomorfismi perché Z è
un retratto di deformazione di U (e, di conseguenza, {z} è un retratto di deformazione di U/Z ). Ne segue
che π⋆ è un isomorfismo.
Vediamo un altro corollario dell’escissione.
Corollario 29. Sia X uno spazio topologico,
x ∈ X un punto
chiuso, U un intorno aperto
di x. L’inclusione di coppie U, U r {x} ⊆ X, X r {x} induce degli isomorfismi
Hk U, U r {x}
∼
=
−−−−−−→
(escissione)
Hk X, X r {x} ,
∀k.
Dimostrazione. Si applichi l’escissione con Z = X r U (si osservi che le ipotesi del Teorema (27) sono
soddisfatte: Z è chiuso ed è contenuto in X r {x} che è aperto).
Naturalmente questo risultato vale anche con U intorno arbitrario di x (non necessariamente aperto).
Def. 29.1. Si definiscono gruppi di omologia locale di X nel punto x i gruppi
Hk X, X r {x} , k ∈ N .
Il corollario precedente ci dice che i gruppi di omologia locale sono effettivamente “locali”, i.e. sono determinati
da un qualsiasi intorno di x in X (ciò, almeno sotto l’ipotesi piuttosto blanda che x sia un punto chiuso).
57
Omologia della sfera.
“L’omologia è racchiusa nelle sfere”. Questo tweet vuole suggerire qual è l’essenza dell’omologia, al di là di
ciò, il calcolo dell’omologia delle sfere è uno dei mattoni per il calcolo dell’omologia in generale, nonché lo
strumento col quale si costruisce l’omologia cellulare (efficace strumento trattato più avanti). In altri termini,
è di fondamentale importanza. Richiamiamo alcune notazioni:
Dn = { x ∈ Rn | || x || ≤ 1} ,
S n = { x ∈ Dn+1 | || x || = 1} ,
i : S n ֒→ Dn+1
(disco di dimensione n, sfera di dimensione n, inclusione S n ⊆ Dn+1 ).
Proposizione 30. Sia n ≥ 1. Si ha
Hn (S n ) ∼
= Z,
Hi (S n ) = 0
per i 6= 0, n ,
H0 (S n ) ∼
= Z.
Nota 30.1. In termini più sintetici, nonché inclusivi anche del caso n = 0, l’omologia ridotta della sfera S n
è isomorfa al gruppo degli interi Z in grado n ed è nulla negli altri gradi.
Dimostrazione. È sufficiente dimostrare quanto affermato nella nota (30.1). Procediamo per induzione su n.
La base dell’induzione è immediata: S 0 è costituito da due punti e la tesi è banale. Sia dunque n ≥ 1.
Consideriamo la coppia (Dn , S n−1 ). Per ogni intero i abbiamo degli isomorfismi
∼
=
Hi (Dn , S n−1 )
(30.2)
(cor. 28)
n−1
e i (Dn /S n−1 )
H
∼
=
e i (S n )
H
Il primo, essendo la sfera S
un retratto di deformazione di Dn r {0}, segue dal corollario (28). Il secondo
n
segue dal fatto che gli spazi D /S n−1 e S n sono omeomorfi. Per la (30.2) ed il fatto che il disco Dn , in
quanto contraibile, ha la stessa omologia del punto, la successione esatta della coppia è la successione
(30.3)
e i+1 (Dn ) −−−−→ Hi+1 (Dn, S n−1 ) −−−−→ H
e i (S n−1 ) −−−−→ H
e i (Dn ) . . .
... H
= 0
∼
e i+1 (S n )
= H
= 0
Da questa si evince la tesi per ragioni induttive.
e n (S n ), ciò consente la scelta
La sfera S n è un oggetto esplicito, cosı̀ come lo è il gruppo H
e n (S n ) ∼
di un generatore canonico e rende l’isomorfismo H
= Z anch’esso canonico .
e n (S n ) è l’elemento descritto di seguito:
Definizione 30.4. Il generatore canonico εn ∈ H
n
i) si identifica S con la frontiera F ∆n+1 dell’n+1 simplesso standard ∆n+1 tramite l’omeomorfismo
(♣)
ϑ : F ∆n+1
−→
Sn ,
x 7→ (x − b)/||x − b||
n+1
essendo b il baricentro di ∆n+1 (n.b.: F ∆n+1 e D
sono entrambi sottospazi di Rn+1 );
ii) si considera l’identità Id∆n+1 : ∆n+1 −→ ∆n+1 come n + 1 simplesso singolare dello spazio ∆n+1 ,
e n (F ∆n+1 )
il corrispondente bordo come n-ciclo supportato su F ∆n+1 e la classe in omologia ǫn ∈ H
corrispondente a tale n-ciclo;
e n (S n ) la classe corrispondente a ǫn ∈ H
e n (F ∆n+1 ) via (♣) .
iii) si considera la classe εn := ϑ⋆ ǫn ∈ H
e n (S n ). Intanto, osserviamo che per
Tra poco proveremo che εn è effettivamente un generatore del gruppo H
n = 0 ed n = 1 possiamo essere ancora più espliciti:
e 0 (S 0 ) , dove σ+ (∆ ) := 1, σ− (∆ ) := −1 ricordiamo che S 0 = {1, −1} ⊆ R ;
• ε = σ+ − σ− ∈ H
0
0
0
• ε1 = I ∈ H1 (S 1 ) (cfr. 18.1 e 18.2).
Siano ε0 e ε1 come nella definizione (30.4). L’uguaglianza ε0 = σ+ − σ− vale perfino a livello di catene,
l’uguaglianza ε1 = I si verifica facilmente suddividendo il ciclo I (per esercizio).
Esercizio 30.5. Provare che ai fini della (30.4) si poteva fissare un qualsiasi punto b interno a ∆n+1 ,
l’omeomorfismo sarebbe cambiato un po’, ma non la classe di omologia εn .
Suggerimento: provare che omeomorfismi F ∆n+1 −→ S n , x 7→ (x−b)/||x−b|| corrispondenti a scelte diverse
del punto b sono omotopi.
58
Inciso 30.6. Dischi e sfere si identificano coi simplessi standard e loro frontiere, l’identificazione (♣) si
estende ad un omeomorfismo
(♣′ )
ϑ : ∆n+1 −−−→ Dn+1 ,
(x−b)
x 7→
||x−b||
dove x denota il punto in cui la semiretta uscente da b e direzione x − b interseca ∆n+1 . Ci sono due aspetti
concernenti l’identificazione ϑ che vogliamo evidenziare:
• ϑ è anche un omeomorfismo di coppie (∆n+1 , F ∆n+1 ) −−→ (Dn+1 , S n ) ;
• ϑ si estende (stessa formula) ad un omeomorfismo ϑ′ di Rn+1 in se con buone proprietà (ad esempio,
conserva l’orientazione26, c’è un’omotopia IdRm ∼{b} ϑ′ che è un omeomorfismo ad ogni istante).
Tutto questo per sottolineare che lavorare con dischi e sfere si riduce a lavorare con simplessi standard e loro
frontiere (ciò, a meno di una deformazione dell’ambiente Rn+1 , cfr. def. §2, 2.1). Abbiamo un diagramma
commutativo
∼
=
e n (S n )
Hn+1 (Dn+1 , S n )
−−−−−−−−−−→
H
x
x
∼
∼
=
= ϑ⋆
ϑ
⋆
′
(30.6 )
δ
e n (F ∆n+1 )
Hn+1 (∆n+1 , F ∆n+1 )
−−−−−−−−−−→ H
∼
=
Id∆n+1
7→
∂ Id∆n+1
dove δ, che è il morfismo di incollamento della successione esatta della coppia ivi indicata, si comporta nel
modo indicato nel diagramma27.
e n (S n ) . Forse la soluzione più rapida è quella di provare che gli
Dimostrazione del fatto che εn genera H
elementi indicati nella riga in basso della (30.6′ ) generano i rispettivi gruppi ai quali appartengono. Assumiamo
induttivamente la tesi per i valori minori di n (sia quindi n ≥ 1). Abbiamo degli isomorfismi
∼
π
ω
=
e n (F ∆n+1 )
e n−1 (F ∆n )
H
−−−−→ Hn (F ∆n+1 , W )
−−−−→ Hn (∆n , F ∆n )
−−−−−→ H
∼
=
∂ Id∆n+1
∼
=
(30.6′ )
7→
∂ Id∆n+1
7→
± Id∆n
Sn+1
Sn
28
dove avendo scritto F ∆n+1 =
di ∆n+1 ), poniamo W =
i=0 ̥i (le facce
i=0 ̥i (tutte le facce
tranne una), l’isomorfismo π è il morfismo di proiezione nella successione esatta della coppia (F ∆n+1 , W )
(poiché W è omeomorfo ad un disco, ha omologia ridotta nulla in ogni grado e π è un isomorfismo) mentre
l’isomorfismo ω sostanzialmente viene dall’escissione: tolto il vertice ℓn+1 la coppia (F ∆n+1 , W ) si retrae
alla coppia (̥n+1 , F ̥n+1 ) = (∆n , F ∆n ) (vediamo Rn ⊆ Rn+1 ). Infine, sopravvive
uno solo dei contributi
di ∂ Id∆n+1 in Hn (F ∆n+1 , W ) (l’unico non supportato in W ): si ha ω ∂ Id∆n+1 = ±Id∆n .
Inciso 30.7. Più avanti parleremo di orientazione (per varietà topologiche), nozione che corrisponde all’omonima nozione data in algebra lineare (per gli spazi vettoriali reali) o geometria differenziale (per le varietà
differenziabili). Il generatore canonico εn è, in un senso che verrà precisato in seguito, il generatore che
corrisponde all’orientazione canonica di S n come varietà differenziabile.
Esercizio 30.8. Si verifichi che risulta
∼
ei W S n
H
=
dove
W
α
S
n
L e n
Hi (S )
α
en W S n = L Z
in particolare, H
α
α
denota una somma wedge di sfere (cfr. §0, 2.6 e §2, 13.1).
α
Suggerimento. Si ha
Si osservi che risulta
W
α
S n :=
S•
ei W S n
H
α
α
S n Z , dove Z è l’insieme costituito da un punto per ogni copia di S n .
=
e i S• S n Z
H
α
=
(cor. 28)
Hi
S•
α
Sn, Z ,
quindi, tenendo presente che l’omologia di una unione disgiunta si identifica con la somma
delle omologie
S• ndiretta
dei singoli spazi (cfr. 7.1), si concluda usando la successione esatta della coppia
S
,
Z
.
α
26
Di orientazione ne parleremo più avanti, per ora ci si accontenti dell’idea intuitiva di orientazione.
27
Seguendo la ricetta della nota che definisce il morfismo di incollamento (§A2, 9.1), si deve prendere Id∆n+1 , quindi prenderne
il bordo nel complesso C• (∆n+1 ), infine vederlo come ciclo nel complesso C• (F ∆n+1 ) .
28
Qui il termine faccia va inteso in senso geometrico, non come nella (1.2). Questo significa che ̥i (faccia i di ∆n+1 ) è l’inviluppo
dei vertici ℓ0 , ..., ℓbi , ..., ℓn+1 (ℓi viene tolto).
59
◦
∼
◦
Gli endomorfismi (=morfismi in se) di un gruppo ciclico infinito, si identificano in modo naturale col gruppo
degli interi Z. Per questa ragione, data una funzione continua f : S n −→ S n , il morfismo indotto in
omologia f⋆ : Hn (S n ) −→ Hn (S n ) di fatto è un numero intero (naturalmente, per n = 0 si deve
considerare l’omologia ridotta), detto grado di f . Si definisce
(31)
deg f
:=
f⋆
∈
Z
∼
=
e n (S n )
End H
Il grado di f è un intero mentre f⋆ è un morfismo di gruppi, scrivere in bell’evidenza deg f = f⋆ ha,
come dire, una sua ruvidezza. Ciò che si vuole comunicare con la definizione (31) è che l’intero deg f , più
che un “mero dato associato a f⋆ ” sia proprio “il morfismo f⋆ ”. Sottolineiamo che se deg f = d, allora
f⋆ (σ) = σ + ... + σ (d-volte). Di conseguenza, ad esempio, considerando omologia con coefficienti in un
gruppo abeliano G arbitrario (trattata in una sezione successiva), si ha che f⋆ è la moltiplicazione per d
indipendentemente dal gruppo G utilizzato.
L’intero deg f ha le proprietà di f⋆ (31.1 e 31.2), alcune proprietà di immediata verifica (dalla 31.3 alla 31.6),
altre più profonde (dalla proposizione 31.7 in poi):
(31.1) deg IdSn = 1 , deg(f ◦ g) = deg f · deg g
(funtorialità, cfr. 10);
(31.2) deg f è un invariante omotopico, i.e. funzioni omotopicamente equivalenti hanno lo stesso grado
(lemma 19);
(31.3) deg f = ± 1 se f è un omeomorfismo (f⋆ deve essere un automorfismo);
(31.4) deg f = 0 se f non è suriettiva (f si fattorizza per S n r {pt} ∼
= Rn , che è contraibile);
(31.5) deg f = −1 se f è la riflessione rispetto ad uno dei piani coordinati (per esercizio);
(31.6) deg f = (−1)n+1 se f = −IdSn è la funzione antipodale (segue dalla 31.5).
Una funzione f : S n −→ S n senza punti fissi è omotopa alla funzione antipodale (se f (x) 6= −x, lo si
muova lungo il semicerchio passante per x, f (x), −x fino a raggiungere il punto −x; per esercizio, si scriva
una formula esplicita per l’omotopia descritta). Dalle (31.2) e (31.6) segue che una tale f ha grado (−1)n+1 .
In modo del tutto analogo, l’eventuale esistenza di un campo vettoriale mai nullo su S n , consentirebbe di
definire un’omotopia dell’identità con la funzione antipodale (muovendo il punto x lungo la direzione definita
dal campo in x fino a raggiungere il punto −x; di nuovo, per esercizio, si scriva esplicitamente l’omotopia
descritta) e, di conseguenza, consentirebbe di scrivere 1 = (−1)n+1 (uguaglianza che per n pari costituisce
un assurdo). Ciò dimostra quanto segue:
(31.7) Se f : S n −→ S n non ha punti fissi, allora deg f = (−1)n+1 .
(31.8) Per n pari, non esistono campi vettoriali mai nulli su S n
(in particolare, la sfera S 2 non è pettinabile).
Un altro risultato importante legato al grado è il seguente Teorema che inverte la (31.2):
(31.9) (Teorema di Hopf). Per n ≥ 1, il grado deg f determina la classe di omotopia di f .
(La sfera S 0 è costituita da due punti, le due possibili funzioni costanti f : S 0 −→ S 0 hanno entrambe
grado 0, pur non essendo omotope).
Il teorema di Hopf non lo dimostriamo (diamo come esercizio il caso decisamente più elementare dove n = 1).
Esercizio 32. Sia θ la coordinata angolare su S 1 (un punto di S 1 è individuato da un angolo, θ è la misura
di tale angolo).
i) provare che la funzione n : S 1 → S 1 , θ 7→ nθ, ha grado n;
ii) provare che se f : S 1 → S 1 ha grado n allora f è omotopa ad n.
Suggerimento: si consideri il cammino I : I → S 1 , s 7→ 2πθ (cfr. 18.1 e 31.1) ed il rivestimento universale
q : R → S 1 , r 7→ 2πr; si verifichi che n⋆ (I) = nI (a tal fine si suddivida I in n tratti uguali); si verifichi
che f ◦ I e n ◦ I si sollevano a funzioni da I ad R con estremo finale n (essendo 0 l’estremo iniziale del
sollevamento); si scriva un’omotopia fg
◦ I ∼{0, n} ng
◦ I (la tilde su una funzione ne denota il sollevamento);
si utilizzi quest’omotopia per scrivere un’omotopia f ∼∅ n .
60
◦
∼
◦
La teoria svolta consente di dimostrare dei risultati molto importanti. Vediamone alcuni, che proponiamo
come esercizi guidati.
Teorema 33. Non esistono retrazioni
r : D n+1 −−→ S n .
Esercizio 33.1. Si provi il teorema (33) secondo la linea indicata:
r
• ragionando per assurdo, si scriva la composizione S n ֒→ Dn+1 −→ S n e si osservi che questa è l’identità
sulla sfera S n ;
• si osservi che sull’omologia in grado n tale composizione induce
IdZ : Z −→ 0 −→ Z
(il che è chiaramente un assurdo).
Teorema 34 (del punto fisso).
f : D 2 −−→ D 2
Una funzione continua del disco in se
ha almeno un punto fisso.
Esercizio 34.1. Si provi il teorema del punto fisso secondo la linea indicata:
• assumendo per assurdo che f non abbia punti fissi, si definisca una funzione continua r : D2 −→ S 1 la
cui restrizione ad S 1 è la funzione identica
sugg.: si ponga r(x) = “punto di intersezione di S 1 con la semiretta uscente da f (x) e passante per x” ;
• si osservi che una tale r è una retrazione di D2 su S 1 (il che è un assurdo per il teorema 33).
Nota 34.2. Naturalmente il risultato vale in dimensione n arbitraria:
una funzione continua f : Dn −−→ Dn ha almeno un punto fisso
(la dimostrazione è la stessa).
Teorema 35 (fondamentale dell’algebra). Sia n ≥ 1,
Un polinomio complesso
p(z) = z n + an−1 z n−1 + ... + a0
ha almeno una radice.
Esercizio 35.1. Si provi il teorema fondamentale dell’algebra secondo la linea indicata:
• si osservi che p(z) è una funzione continua del piano complesso C in se;
• si verifichi che per R >> 0 la funzione
ϕ : SR × I
−−−−→
7→
(z, t)
C r {0}
t·z n + (1−t)·p(z)
(SR denota il cerchio di raggio R centrato nell’origine), è ben definita ed è un’omotopia della restrizione
di p ad SR , che denoteremo con p̃, e la restrizione della funzione z n ad SR ;
• si deduca che per R come sopra, la composizione
p̃
π
SR −−→ Cr{0} −−→ SR
dove π(w) := R·w/||w||
ha grado n (il valore che si ottiene sostituendo p̃ con z n );
• assumendo per assurdo che p non abbia radici, si riscriva π ◦ p̃ come composizione
p
π
SR ֒→ C −−→ Cr{0} −−→ SR
e si osservi che, contraddicendo quanto provato al punto precedente, una tale funzione ha necessariamente
grado nullo in quanto si fattorizza per C che ha omologia banale.
61
Definizione 36.1. Una funzione f : S n −→ S m
• la diremo simmetrica se soddisfa la relazione f (−z) = f (z), ∀ z ∈ S n ;
• la diremo antisimmetrica se soddisfa la relazione f (−z) = −f (z), ∀ z ∈ S n .
Esercizio 36.2. Si provi che una funzione antisimmetrica f : S 1 −→ S 1 ha grado dispari.
Suggerimento: si consideri il diagramma a lato, dove ε1 : I −→ S 1 denota il generatore
canonico di H 1 (S 1 ) e g un sollevamento della composizione f ◦ ε1 . Si provi che
∃ m ∈ Z g( 21 ) − g(0) = m + 21 , g( 21 +t) − g( 12 ) = g(t) − g(0) , t ∈ [0, 21 ] .
Infine, si verifichi che deg f = g(1) − g(0) = 2m+1 (che è dispari).
g
ր
f ◦ε
R
π
y
I −−−−1→ S 1
Nota 36.3. In dimensione superiore vale un risultato analogo (che non dimostriamo):
una funzione antisimmetrica f : S n −→ S n ha grado dispari.
Inciso 36.4. Le funzioni simmetriche f : S n −→ S n hanno grado pari. Torneremo su questo risultato
nella sezione sull’omologia cellulare, per ora ci limitiamo ad osservare che tali funzioni si fattorizzano come
composizione
g
π
S n −−→ S n / ± 1 −−→ S n
π è la proiezione naturale e g([x]) := f (x) .
Si noti che lo spazio al centro è lo spazio proiettivo reale Pn (R), cfr. esempio (61).
Il caso dove n = 1 può essere trattato ora:
Esercizio 36.5. Si provi che una funzione simmetrica f : S 1 −→ S 1 ha grado pari.
g
π
Suggerimento: la sequenza dell’inciso (36.4) assume la forma S 1 −−→ S 1 = P1 (R) −−→ S 1 dove π manda il
punto di angolo θ in quello di angolo 2θ . Si provi che π⋆ è la “moltiplicazione per 2”.
Teorema 37 (di Borsuk-Ulam). Sia f : S 2 −−→ R2 una funzione continua. Si ha che
esistono due punti antipodali aventi la stessa immagine.
Esercizio 37.1. Si provi il teorema di Borsuk-Ulam secondo la linea indicata:
• assumendo per assurdo che ciò non accada, si consideri la composizione
ω :
h
R2 r {0}
7→
f (x) − f (−x)
S 1 ֒→ S 2 −−→
x
π
−−→ S 1
dove h è definita nella maniera indicata e π è la retrazione π(z) = z ||z|| ;
• si osservi che ω è antisimmetrica, quindi deve avere grado dispari per l’esercizio (36.2), ma fattorizzandosi
per S 2 (che ha primo gruppo di omologia banale) deve avere grado nullo. Questo è assurdo.
Nota 37.2. Di nuovo, in dimensione superiore vale un risultato analogo:
f : S n −→ Rn continua antisimmetrica =⇒ ci sono due punti antipodali con la stessa immagine.
La dimostrazione è identica a quella data per n = 2, solo che si deve utilizzare il risultato della nota (36.3).
62
Omologia dei ∆-complessi e Omologia Simpliciale.
Abbiamo esordito dicendo “L’omologia è l’omologia singolare”. Tuttavia esistono altre teorie omologiche che
pur essendo per certi versi meno generali e forse più artificiose sono significative sia per ragioni storiche che
per il fatto di offrire dei vantaggi computazionali.
Questa sezione è motivata dall’interesse all’omologia dei ∆-complessi come strumento esplicito di calcolo.
Per quanto l’omologia dei ∆-complessi e l’omologia simpliciale (introdotte più avanti in
questa sezione) siano teorie astratte che possono essere introdotte in maniera completamente
indipendente dall’omologia singolare, il principio che meglio le interpreta è il seguente:
Se uno spazio topologico X è stato costruito attaccando simplessi (o meglio, copie del
simplesso standard), ai fini del calcolo dell’omologia singolare il complesso C• (X) può
essere sostituito dal sottocomplesso dei simplessi coinvolti nella costruzione.
Prima di enunciare un teorema preciso (cfr. Thm 45) che formalizzi questo principio vediamo
due esempi e lasciamo per esercizio un terzo esempio.
Qui, anche grazie alle figure, le notazioni sono abbastanza autoesplicative, quindi non ci soffermiamo ad
inserirle in un setting matematicamente rigoroso, setting che peraltro introduciamo più avanti (cfr. Def. 43,
Def. 44 e Thm. 45).
Esempio 40. Il piano proiettivo reale X = P2 (R) si può realizzare attaccando due triangoli
V = [v0 , v1 , v2 ] e P = [p0 , p1 , p2 ] come indicato
v2
v1 = p1
simplessi: V = [v0 , v1 , v2 ] , P = [p0 , p1 , p2 ] e loro facce
identificazioni: [v1 , v2 ] = [p0 , p2 ], [v0 , v2 ] = [p1 , p2 ] , [v0 , v1 ] = [p0 , p1 ]
(e, di conseguenza, [v0 ] = [p0 ] = [v1 ] = [p1 ] ,
[v2 ] = [p2 ])
p2
v0 = p0
Il complesso C•∆ = C•∆ (X) costituito dai due 2-simplessi V = [v0 , v1 , v2 ] e P = [p0 , p1 , p2 ]
e dalle loro facce è il complesso
(40′ )
ZV ⊕ ZP
∂2
−−−→ Z[v0 , v1 ] ⊕ Z[v0 , v2 ] ⊕ Z[v1 , v2 ]
7→
(a, b)
( a + b , −a + b , a − b )
(λ, µ, ν )
∂1
−−−→
Z[v0 ] ⊕ Z[v2 ]
7→
( −µ − ν , µ + ν )
−−→ 0
Calcolandone l’omologia si ottiene:
Hk (C•∆ ) = 0 ,
H1 (C•∆ ) =
H0 (C•∆ ) ∼
=
per k ≥ 2
ker∂1
Im∂2
=
Z[v ]
0
h(1, 0, 0), (0, 1, −1)i
h(1, −1, 1), (1, 1, −1)i
⊕ Z[v2 ]
Im∂1
∼
= Z
(per k ≥ 3 è evidente, per k = 2 segue da ker ∂2 = 0);
∼
= Z2
(generato dalla classe ℓ di (1, 0, 0), si ha 2ℓ = 0);
(è generato dalla classe di (1, −1)).
L’omologia del complesso C•∆ coincide con l’omologia singolare del piano proiettivo reale.
Si noti che, a priori, non è affatto ovvio, ad esempio, neanche che risulti H3 (X) = 0. Infatti, il gruppo
C3 (X), essendo generato da tutti i 3-simplessi singolari, che sono una infinità non numerabile, è un gruppo
libero enorme!
63
Esempio 41. Il Toro reale X = R2 /Z2 si può realizzare attaccando due triangoli V =
[v0 , v1 , v2 ] e P = [p0 , p1 , p2 ] come indicato
v2
v1 = p2
simplessi: V = [v0 , v1 , v2 ] , P = [p0 , p1 , p2 ] e loro facce
identificazioni: [v1 , v2 ] = [p0 , p1 ] , [v0 , v2 ] = [p0 , p2 ] , [v0 , v1 ] = [p1 , p2 ]
(e, di conseguenza, [v0 ] = [p0 ] = [v1 ] = [p1 ] = [v2 ] = [p2 ])
p0
v0 = p1
In questo caso, il complesso C•∆ = C•∆ (X) costituito dai due 2-simplessi V = [v0 , v1 , v2 ]
e P = [p0 , p1 , p2 ] e loro facce è il complesso
(41′ )
∂2
ZV ⊕ ZP
−−−→ Z[v0 , v1 ] ⊕ Z[v0 , v2 ] ⊕ Z[v1 , v2 ]
7→
(a, b)
( a + b , −a − b , a + b )
(λ, µ, ν )
∂1
−−−→ Z[v0 ]
7→
−−→ 0
0
Calcolandone l’omologia si ottiene:
Hk (C•∆ ) = 0 ,
per k ≥ 3 ;
∼
=
H2 (C•∆ ) = ker ∂2
H1 (C•∆ ) =
ker∂1
Im∂2
=
(è generato dalla classe di (1, −1));
Z
Z[v , v ]
0 1
⊕ Z[v0 , v2 ] ⊕ Z[v1 , v2 ]
h(1, −1, 1)i
∼
= Z⊕Z
(è generato dalle classi di (0, 1, 0) e (0, 0, 1));
H0 (C•∆ ) = Z[v0 ]
(che è una copia di
Z ).
L’omologia del complesso C•∆ coincide con l’omologia singolare del Toro.
Esercizio 42. Realizzare la sfera
S2
=
x ∈ R3 ||x|| = 1
attaccando due triangoli V = [v0 , v1 , v2 ] e P = [p0 , p1 , p2 ] e calcolare l’omologia del complesso C•∆
corrispondente.
Risposta. H2 (C•∆ ) ∼
= Z (generato da V − P ), H1 (C•∆ ) = 0, H0 (C•∆ ) ∼
= Z (generato da uno dei vertici).
64
Passiamo alla teoria generale.
Prima di procedere vogliamo porre l’attenzione su un punto. A dispetto dei termini usati (“simplesso”,
“faccia”), nella definizione che segue non ci sono affatto spazi topologici (niente triangoli o altro), c’è solo un
dato combinatorico: una collezione di insiemi finiti ordinati.
Def. 43. Un n-simplesso astratto S = [v0 , ..., vn ] è un insieme ordinato di n + 1 elementi,
detti vertici. Una faccia di un simplesso astratto è un qualsiasi sottoinsieme non-vuoto con
l’ordinamento indotto. Sia {Sα } una famiglia di simplessi astratti (disgiunti) e sia Ω l’unione
di tutte le loro facce (le Sα incluse). Una relazione d’equivalenza ∼ sull’insieme Ω si dice
di tipo simpliciale se soddisfa la proprietà che segue:
[v0 , ..., vk ] ∼ [p0 , ..., ph ]
=⇒
k = h
e
[vi1 , ..., vir ] ∼ [pi1 , ..., pir ] , ∀ i1 ≤ ... ≤ ir
Sia ∼ una relazione d’equivalenza di tipo simpliciale e sia Ω/ ∼ l’insieme delle classi d’equivalenza. Inoltre, denotiamo con C•∆ (Ω/ ∼ ) il complesso
(43.1) . . . Cn∆
∂n
∆
−−−→ Cn−1
∂n−1
−−−→ . . . C2∆
∂2
−−−→ C1∆
∂1
−−−→ C0∆
−−−→
0
dove Cn∆ = Cn∆ (Ω/ ∼ ) denota il gruppo abeliano libero generato dalle classi d’equivalenza
degli n simplessi di Ω e dove l’operatore ∂n è definito ponendo
P
∂n S =
(−1)i [v0 , ..., vi−1 , vi+1 ..., vn ]
(somma alterna delle n−1 facce di S ).
Infine, un ∆-complesso astratto è un complesso ottenuto come sopra.
Esercizio 43.2. Si osservi che il fatto che la relazione ∼ sia di tipo simpliciale ci dice che i ∂n sono ben-definiti
e si verifichi che la successine (43.1) è effettivamente un complesso (cioè che ∂n−1 ◦ ∂n = 0, ∀ n).
Si noti che una faccia di un simplesso astratto è anch’essa un simplesso astratto. Che la relazione ∼ sia di
tipo simpliciale significa che possiamo identificare solo simplessi (= facce) della stessa dimensione (= “numero
vertici meno uno”) e che se identifichiamo due k-simplessi (che essendo insiemi ordinati sono in naturale
corrispondenza biunivoca), allora identifichiamo anche ogni faccia del primo con la corrispondente faccia del
secondo. Naturalmente, poiché possono essere equivalenti solo simplessi della stessa dimensione, la relazione ∼
si fattorizza in unaSrelazione d’equivalenza su ogni Ωn (essendo questo l’insieme degli n simplessi) e possiamo
•
scrivere Ω/ ∼ = n Ωn / ∼ .
Come già sottolineato, la definizione (43) è puramente combinatorica e non coinvolge affatto la topologia. Ciò
nonostante, possiamo usare i dati ivi considerati per costruire uno spazio topologico. Vediamo come:
Per ogni n-simplesso astratto S = [v0 , ..., vn ] consideriamo lo spazio ∆(S) (che chiameremo
simplesso) definito come l’insieme delle combinazioni lineari formali
n
P
P
(43.3)
∆(S) :=
ti vi ,
ti ∈ R+ ,
ti = 1
i=0
dotato della topologia naturale.
(Presi ordinatamente dei punti u0 , ..., un ∈ Rn non contenuti in alcun iperpiano, l’insieme convesso D che
li contiene si identifica in modo naturale con ∆(S), a quest’ultimo diamo la topologia indotta da D tramite
questa identificazione. Chiaramente questa topologia non dipende dalla scelta degli ui ).
Def. 44. Lo spazio topologico ottenuto considerando l’unione disgiunta dei simplessi ∆(Sα )
ed attaccando le facce che sono in relazione secondo la relazione d’equivalenza di tipo simpliciale ∼ lo chiamiamo spazio topologico associato ai dati ({Sα }, Ω, ∼ ) , o più brevemente,
∆-complesso.
Precisazione 44.1. Due facce della stessa dimensione, in quanto marcate dall’ordine dei vertici, sono canonicamente omeomorfe, “attaccarle” significa attaccarle secondo tale omeomorfismo, i.e. significa quozientare
l’unione disgiunta per la relazione che identifica punti che si corrispondono tramite l’omeomorfismo (Def. §0, 2).
65
Nota 44.2. Naturalmente c’è un abuso di linguaggio nell’usare il termine ∆-complesso sia per indicare la
sequenza di morfismi (43.1) che lo spazio topologico della definizione (44). D’altro canto, trattandosi di oggetti
associati agli stessi dati e considerato che di certo non si corre il rischio di confonderli...
Osservazione 44.3. Poiché si considerano insiemi ordinati e le facce sono definite scrivendo i vertici nell’ordine
in cui compaiono nel simplesso iniziale, l’interno di ogni faccia si immerge omeomorficamente nel ∆-complesso
(def. 44). In altri termini, non può accadere che, effettuate le identificazioni, una faccia risulti attaccata a se
stessa in modo non banale. Questa proprietà è cruciale ai fini del Teorema (45).
Inciso 44.4. Naturalmente, volendo costruire spazi topologici, si possono considerare simplessi e si possono
attaccare le loro facce in modo arbitrario. Ci si può chiedere perché la definizione (43) mette in gioco un
ordinamento dei vertici e perché poi la definizione (44) consente un unico modo di attaccare due facce (quello
che rispetta tale ordinamento). Ecco la risposta: i) ciò non è “sostanzialmente” restrittivo; ii) si evita di
appesantire il discorso ed il proliferare di notazioni; iii) un approccio che consentisse incollamenti arbitrari
non sarebbe funzionale.
Entriamo nel dettaglio di quanto appena affermato. Sia X uno spazio topologico ottenuto considerando
simplessi ∆(Sα ) ed attaccando le facce in modo arbitrario (date due facce, si considera una qualsiasi corrispondenza biunivoca dei vertici dell’una coi vertici dell’altra, quindi si attaccano secondo l’omeomorfismo
associato a tale corrispondenza). Avendo in mente quali facce attaccare, è “sostanzialmente sempre possibile”
ordinare i vertici degli Sα di partenza in modo che tutti gli incollamenti rispettino l’ordine (in altri termini,
che la relazione ∼ associata agli incollamenti sia come richiesto nella definizione (43), cioè compatibile), dove
“sostanzialmente sempre possibile” significa che qualora ciò non sia possibile, lo diventa a meno di suddividere
i vari ∆(Sα ). Il punto ii) è evidente. Quanto al punto iii), consentendo incollamenti arbitrari non varrebbe
più il Teorema (45), o meglio, volendo che valga questo Teorema, dovremmo comunque assumere delle ipotesi
sulla geometria dei simplessi Sα in questione, o in alternativa suddividerli!
Teorema 45. Sia X lo spazio
topologico associato ad un ∆-complesso astratto (cfr. def. 43
∆
e 44). Il complesso C• Ω/ ∼ è un sottocomplesso del complesso C• (X). Inoltre, l’inclusione
induce isomorfismi canonici
Hn (X) ∼
= Hn C•∆ (Ω/ ∼) , ∀ n .
In effetti, l’inclusione C•∆ (Ω/ ∼ ) ֒→ C• (X) è un’omotopia di complessi (ma questo non lo dimostreremo).
Dimostrazione. Dimostreremo il Teorema solamente nel caso che ci interessa: quello dove Ω/ ∼ è un insieme
finito. Assumiamo che la collezione degli Sα che definisce X sia finita e ragioniamo per induzione sulla
cardinalità di Ω/ ∼, che denotiamo con N (X). Un simplesso ∆(S) privato di un punto interno si retrae al
∆-complesso delle sue facce. Sia dunque X ′ il ∆-complesso ottenuto da X privato di un punto interno ad
un simplesso di dimensione massima e sul quale si sia effettuata la retrazione di cui sopra. Si ha N (X ′ ) =
N (X) − 1, naturalmente non affermiamo nulla sul numero degli Sα , che può anche crescere: ad esempio un
triangolo T ha #Sα = 1 ed N (T ) = 7 (oltre a T , ci sono i suoi tre lati ed i suoi tre vertici) mentre il suo
“perimetro” T ′ (ciò che si ottiene retraendo T privato di un punto interno) ha #Sα = 3 ed N (T ) = 6.
Per ipotesi induttiva possiamo assumere che X ′ soddisfi la tesi (la base dell’induzione essendo banale). Sia
Ω′ / ∼ l’insieme dei simplessi di X ′ . Abbiamo un’inclusione di complessi di catene C•∆ (Ω′ / ∼) ֒→ C•∆ (Ω/ ∼)
(le cui omologie sono rispettivamente l’omologia dei ∆-complessi di X ′ e quella di X ). A questo punto,
osservando che X si ottiene da X ′ attaccandovi una n-cella, la tesi segue dall’ipotesi induttiva e dal confronto
dell’inclusione di cui sopra con la successione esatta della coppia (X, X ′ ). Non entriamo nel dettaglio di questo
confronto, confronto che si riduce alla relazione dell’omologia di uno spazio con quella dello spazio ottenuto
attaccandovi una n-cella, quest’ultima è la relazione (50.1) enunciata e dimostrata nella prossima sezione.
66
Classicamente si considera l’omologia simpliciale piuttosto che quella dei ∆-complessi.
L’omologia simpliciale viene introdotta in modo geometricamente più naturale e senza passare attraverso
l’omologia dei ∆-complessi:
• si considerano simplessi ∆(Sα ) (cfr. 43.3), che chiameremo simplessi simpliciali, privi dell’informazione
aggiuntiva topologicamente irrilevante concernente l’ordine dei vertici;
• si attaccano facce dei simplessi considerati, i singoli incollamenti possono essere arbitrari (nel senso che
non c’è alcun ordine dei vertici da rispettare), però si richiede che il risultato finale, il cosiddetto complesso
simpliciale, sia “buono”: ogni ∆(Sα ) deve immergervisi e due tali simplessi possono avere in comune al
più una faccia (e le sottofacce di questa naturalmente);
• si definisce un complesso di catene libero analogo al complesso (43.1): i gruppi del complesso sono i gruppi
abeliani liberi generati dai simplessi considerati e loro facce, e l’operatore di bordo è definito nella maniera
opportuna (a questo punto, il modo più semplice per definirlo è quello di fissare un’orientazione per ogni
singolo simplesso ed usare una formula tipo quella della def. 43). Non entriamo nel dettaglio.
Osservazione 46. Dalle richieste sul risultato finale, quello post-incollamenti per intenderci, due facce di uno
stesso simplesso simpliciale sono necessariamente distinte, in particolare un n-simplesso simpliciale ha n + 1
vertici distinti in X , ogni simplesso simpliciale è univocamente individuato dai suoi vertici in X , un insieme
di vertici in X è al più l’insieme dei vertici di un simplesso simpliciale (cosı̀, se due simplessi simpliciali hanno
in comune k vertici, allora condividono una faccia che contiene tali vertici).
Come conseguenza di quanto appena osservato, un ordine totale dei vertici in X (che ne esista uno segue
dal lemma di Zorn) induce un ordinamento dei vertici di ogni simplesso simpliciale ed è automatico che le
identificazioni rispettino tale ordinamenti indotti (banalmente per il fatto di essere partiti da X). Pertanto,
di fatto, un complesso simpliciale è anche un ∆-complesso.
Avremmo potuto introdurre i complessi simpliciali come ∆-complessi astratti con la proprietà di avere i
simplessi univocamente individuati dai loro vertici in X (in particolare, classi di equivalenza di due facce di
uno stesso simplesso necessariamente distinte).
Nota 47. L’omologia simpliciale appare geometricamente più naturale e meno artificiosa di quella dei
∆-complessi. D’altro canto negli esempi (40) e (41) gli spazi in questione sono divisi in due soli triangoli,
i lati di uno stesso triangolo non vengono identificati ma ciò non vale per alcuni vertici (che sono anch’essi
facce). Questo significa che quelle date non sono realizzazioni del Piano Proiettivo e del Toro come complessi
simpliciali (una tale realizzazione richiede necessariamente una suddivisione di questi spazi in ben più di due
triangoli, cosa che complicherebbe sensibilmente i complessi che calcolano l’omologia (40′ ) e (41′ )). Vediamo
l’esempio di possibili realizzazioni del Toro:
b
ℓ
T
a
ℓ′
T
′
b
∆-complesso
non è un complesso simpliciale
complesso simpliciale
Nelle due figure a destra non abbiamo disegnato le identificazioni dei lati del quadrato grande, ma ci sono!
Nella figura a sinistra, l’ordine (non disegnato) dei vertici dei due 2-simplessi è come nell’esempio (41).
• Nel caso a sinistra, nessuno dei due 2-simplessi si immerge nel Toro;
• nel caso al centro, i singoli simplessi si immergono nel Toro ma ci sono molte coppie di triangoli che condividono due vertici pur non avendo in comune il lato che li collega, ad esempio, i triangoli T e T ′ , nel Toro
(i.e. dopo le identificazioni), contengono a e b pur non contenendo “il” lato che li collega; che in effetti non
è neanche univocamente determinato, essendo ℓ ed ℓ′ distinti, entrambi di vertici {a, b}. Sottolineiamo
che la coppia {a, b} non individua “un” lato, essendo {a, b} la coppia dei vertici sia di ℓ che di ℓ′ .
Oss. 48. Visto che i complessi simpliciali sono ∆-complessi, anche per essi vale il Teorema (45):
se X è un complesso simpliciale,
la sua omologia simpliciale è canonicamente isomorfa alla sua omologia singolare.
67
Omologia cellulare.
Come primo passo, calcoliamo l’omologia di una coppia (W, X) dove W si ottiene attaccando ad X dei
dischi lungo la loro frontiera (lemma 50.3 sotto). Ricordiamo la notazione, per n ≥ 0, poniamo
Dn = {x ∈ Rn | || x || ≤ 1} ,
S n = {x ∈ Dn+1 | || x || = 1} ,
i : S n ֒→ Dn+1 ,
e n (S n )
εn ∈ H
e n (S n ) ∼
(disco di dimensione n, sfera di dimensione n, inclusione S n ⊆ Dn+1 , generatore canonico di H
= Z,
n
cfr. Def. 30.4). Ricordiamo che l’omologia ridotta della sfera S è Z in grado n ed è nulla negli altri gradi
(Proposizione 30 e nota 30.1).
Se attacchiamo un disco Dn (n ≥ 1) ad uno spazio topologico
X tramite una funzione φ : S n−1 → X
`
n
n
(cfr. §1, def. 1), la funzione caratteristica Φ : D → X φ D dà una identificazione
`
(50.0)
Dn S n−1 ∼
= X φ Dn X
`
Poiché X è un retratto di deformazione di un suo intorno aperto in X φ Dn (non importa chi è X , quanto
asserito
segue dal fatto che il disco privato dell’origine Dn r{0}
` si ritrae alla sua frontiera e che, naturalmente,
`
X φ Dn r {0} è un intorno aperto di X), la coppia (X φ Dn , X) soddisfa le ipotesi del Corollario (28).
Di conseguenza, tenuto conto del fatto che Dn /S n−1 è omeomorfo alla sfera S n si ottiene
`
`
Z, k = n
n
n
n−1
n
n
e
e
e
) = Hk (S ) =
(50.1) Hk (X φ D , X) = Hk (X φ D X) = Hk (D /S
0 , k 6= n
(50.0)
(Cor. 28)
(30.8)
Abbiamo scritto dei segni`di uguaglianza “=” perché in effetti
` le identificazioni sono tutte naturali: la composizione ∆n → Dn → X φ Dn è il generatore in Hn (X φ Dn , X) (una n-catena con bordo nell’immagine
`
di X in X φ Dn ), che corrisponde al generatore canonico εn ∈ Hn (S n ) (def. 30.4) (si osservi che, alla luce
di come’è definito εn , quanto appena affermato è sostanzialmente una tautologia).
Naturalmente, la (50.1) si generalizza al caso dove ad X attacchiamo più dischi (cfr. §1, 4, usiamo la stessa
notazione): abbiamo una copia di Z in grado n per ogni n-disco attaccato, precisamente
` n
L
en W S n
e n W Dn S n−1 = H
e n X ` Dn X
(50.2)
Hn X
=
= H
Dα , X = H
αZ
α
α
α
α
α
α
α
(30.9)
α
(ed i vari “Hk ” saranno nulli per k 6= n), dove αZ ∼
= Z denota la copia di Z corrispondente alla n-cella Dαn .
Riassumiamo quanto stabilito.
Lemma 50.3.
(50.3′ )
Hk X
`
α
n
φ α Dα ,
X
=
L
αZ
,
0 ,
k = n
k 6= n
(nell’omologia della coppia, abbiamo una copia di Z in grado n per ogni n-disco attaccato).
Inciso. Fissato un indice α, corrispondentemente abbiamo un’inclusione α Z ⊆ ⊕ αZ e una proiezione
⊕ αZ −→ α Z canonici, questi possono essere visti come morfismi indotti in omologia da funzioni tra coppie:
`
` n
` n
L
Dα , X
Dα , X
֒→ X
X
induce
α Z −→ α Z
Dαn
α
α
X
`
dove consideriamo X
Dαn , X
`
α 6= α
֒→
X
`
α
α 6= α
Dαn , X
Dαn come sottospazio di X
`
α
induce
αZ ⊆
L
αZ
Dαn . Per esercizio, ci si convinca di quanto affermato.
Osservazione. Come conseguenza della (50.3′ ), la successione esatta della coppia dà delle
identificazioni (i.e. degli isomorfismi naturali)
` n
Dα
= Hk (X) ,
k 6= n−1, n .
(50.4)
Hk X
α
68
Quanto visto sopra si applica perfettamente al caso dei CW-complessi. Sia dunque X un
CW-complesso. Consideriamo il diagramma
Hn+1 X n+1 , X n
(50.5)
0
y
δn+1
Hn X n
πn y
−−−→
d n+1
Hn X n , X n−1
δn y
−−−→ Hn−1 X n−1
0
Hn X n+1
−−−→
−−−→ 0
dn
πn−1
−−−→
Hn−1 X n−1 , X n−2
dove: X n denota l’n-scheletro di X ; ognuna delle tre successioni, due orizzontali e una verticale, è la
successione esatta della coppia ivi visualizzata; i morfismi diagonali sono definiti in modo che il diagramma
commuti; i tre zeri che compaiono nel diagramma (da sinistra a destra) si giustificano con le sostituzioni
Hn−1 (X n−2 ) = 0 ,
(♣)
Hn (X n−1 ) = 0 ,
Hn (X n+1 , X n )
=
(50.3′ )
0
(per la 50.4, quando attacchiamo una m-cella l’omologia nei gradi maggiori di m non cambia, per cui il
d-scheletro non ha omologia nei gradi maggiori di d; ciò giustifica le prime due uguaglianze).
Quello scritto in diagonale è un complesso, infatti dn ◦ dn+1 = ... ◦ (δn ◦ πn ) ◦ ... = 0 (i due morfismi al
centro sono morfismi consecutivi di una stessa successione esatta della coppia). Il seguente Teorema (52) ci
dice che tale complesso calcola l’omologia di X .
Def. 51. Sia X un CW-complesso. Il complesso Cell (X) :
... −−→ Hn+1 X n+1 , X n
dn+1
−−−→ Hn X n , X n−1
si chiama complesso cellulare di X .
d
−−n→ Hn−1 X n−1 , X n−2 −−→ ...
Teorema 52. Sia X un CW-complesso. L’omologia del complesso cellulare Cell (X) è
canonicamente isomorfa all’omologia singolare dello spazio X :
∼
Hn Cell(X)
= Hn (X) .
Dimostrazione. Risulta
∼
Hn (X)
Hn (X n+1 )
=
(1)
∼
=
cokerδn+1
=
(2)
=
(5)
(3)
πn (Hn (X n ))
Im dn+1
=
(6)
ker δn
Im dn+1
Hn (X n )
δn+1 [...]
=
(7)
∼
=
(4)
πn (Hn (X n ))
πn (δn+1 [...])
ker (πn−1 ◦ δn )
Im dn+1
=
(8)
ker dn
Im dn+1
Quanto all’isomorfismo (1), risulta
(52.1)
Hn (X)
=
Hn (X n+r )
(♣)
=
Hn (X n+1 ) ,
r ≥ 1.
La (♣) segue iterando la (50.4), sottolineiamo che vale per ogni r ≥ 1. Di conseguenza, almeno nel caso
in cui X ha dimensione finita si ha l’uguaglianza Hn (X) = Hn (X n+1 ). In effetti, poiché i simplessi sono
compatti, ogni catena è supportata su un qualche scheletro, come pure ogni bordo in X è il bordo di una
catena supportata su un qualche scheletro. Tenendo conto di ciò, si prova l’uguaglianza desiderata anche nel
caso di complessi di dimensione infinita (per esercizio).
La veridicità delle uguaglianze da (2) a (8), tenendo presente che righe e colonne del diagramma sono esatte,
segue direttamente dal diagramma stesso (convincersene, per esercizio).
69
Il gruppo Hn (X n , X n−1 ) è il gruppo abeliano libero generato dalle n-celle. Infatti, la (50.2) ci dice che
Hn (X n , X n−1 )
⊕ αZ ,
=
α
(abbiamo una copia di Z per ogni n-cella). D’altro canto questi gruppi sono i gruppi che compaiono nel
complesso cellulare, che per il Teorema (52) calcola l’omologia di X . Ciò dà molte informazioni sull’omologia
di X e permette di calcolarla a partire dai dati combinatorici della realizzazione di X come CW-complesso.
Iniziamo col sottolineare alcune conseguenze immediate di quanto appena osservato:
• il rango dell’omologia in grado n non può eccedere la cardinalità dell’insieme delle n-celle di una qualsiasi
realizzazione di X come CW-complesso;
• i gruppi di omologia di un CW-complesso finito (cfr. §1, 6 e §1, 6.4) sono finitamente generati, i.e. i vari
H n hanno rango finito;
• se possiamo realizzare X senza utilizzare n-celle, allora si deve avere Hn (X) = 0.
I CW-complessi che si incontrano usualmente studiando varietà differenziali, algebriche o complesse sono finiti,
per cui si applica quanto asserito nel secondo punto qui sopra. Il terzo punto è il caso dell’omologia in grado
dispari degli spazi proiettivi complessi, risultato già non banale e interessante di per se (cfr. esempio 56). A
questo punto, approfondiamo il discorso per i CW-complessi finiti.
Se X è un CW-complesso finito di dimensione n, il complesso cellulare Cell(X) è un
complesso del tipo
(53)
dn−1
d
d
d
d
Z ℓn −−n→ Z ℓn−1 −−−→ Z ℓn−2 . . . Z ℓ3 −−3→ Z ℓ2 −−2→ Z ℓ1 −−1→ Z ℓ0 ,
essendo ℓi il numero delle i-celle.
Questa chiave di lettura del complesso cellulare di un CW-complesso finito è molto utile, ad esempio, insieme
al Teorema (52) ci dice che la caratteristica di Eulero-Poincaré è un invariante omologico:
Corollario 54. Sia X un CW-complesso finito. Si ha
P
χ(X) =
(−1)i rango Hi (X)
Abbiamo introdotto (cfr. §1,
la caratteristica di Eulero Poincaré di un CW-complesso finito X come la
P def. 7)
somma alterna χ(X) :=
(−1)i ℓi , essendo ℓi il numero delle i-celle.
Dimostrazione. Sappiamo che il complesso (53) calcola l’omologia di X , la tesi segue dall’esercizio (55) sotto.
Esercizio 55. Provare che dato un complesso di gruppi abeliani liberi di rango finito C• , risulta
P
P
(−1)i rango(Ci ) =
(−1)i rango Hi (C• ) .
Suggerimento: si scrivano le due espressioni come somme che coinvolgono nuclei e immagini dei vari di (come
step preliminare, può essere utile, sebbene non indispensabile, verificare che il risultato vale su Z se e solo se
vale su R, cosı̀ da ridursi a gestire spazi vettoriali).
Esempio 56. Lo spazio proiettivo complesso Pn (C) si ottiene dallo spazio Pn−1 (C) incollando un 2n-disco.
Partendo da P0 (C) = {pt} ciò dà una sua possibile realizzazione come CW-complesso:
k-scheletro
{pt}
k =
0
=
{pt}
⊆
P1 (C)
1
2
=
P1 (C)
⊆
3
P2 (C)
4
=
P2 (C)
5
... Pn (C)
2n
In questo caso nella successione (53) si alternano il gruppo Z col gruppo zero, i morfismi sono necessariamente
tutti nulli e di conseguenza si ha
(
Z per k pari da 0 a 2n
n
Hk P (C)
=
0 altrimenti
70
Inciso 57. Per sfruttare pienamente la (53) abbiamo bisogno di dire chi sono i morfismi dn in termini di celle
e morfismi di incollamento. Se indichiamo con φα : Sαn−1 → X n−1 il morfismo di incollamento relativo alla
n-cella (cfr. §1, def. 1 e def. 6, utilizziamo le notazioni ivi utilizzate), abbiamo quanto segue:
il generatore corrispondente alla n-cella Dαn va tramite dn nell’immagine del generatore di Sαn−1
tramite il morfismo indotto in omologia da φα .
In termini tecnici, questo risultato si traduce in una formula inevitabilmente pesante (cfr. lemma 60 sotto);
sostanzialmente segue dal diagramma (50.5). Vediamo subito qualche esempio che, oltre ad essere interessante
di per se, ci aiuti a comprenderlo.
Esempio 58. Nel caso della superficie compatta C2 di genere 2 realizzata come CW-complesso come
nell’esempio §1, 9.1 (utilizziamo le stesse notazioni ivi utilizzate), la successione (53) è la successione
d =0
2
−−−
−−→
Z
(grado 2)
Z
d =0
4
1
−−−
−−→
(grado 1)
.
Z
(grado 0)
Secondo il principio affermato nell’inciso, l’immagine del generatore in grado 2, i.e. d2 (1), è l’elemento φ⋆ (I),
dove I denota il generatore di S 1 (frontiera della 2-cella) e φ il morfismo di incollamento sull’1-scheletro.
Quanto all’incollamento della 2-cella abbiamo φ = ϕ ◦ ω, di conseguenza φ⋆ (I) = 0 ∈ Z4 , questo perché il
cammino che percorre il bordo della 2-cella è il cammino λ1 ∗ µ1 ∗ λ−1
∗ µ−1
∗ λ2 ∗ µ2 ∗ λ−1
∗ µ−1
(la notazione
1
1
2
2
è sempre quella in §1, 9.1, cfr. figura) che, in omologia, è nullo (i vari termini si cancellano).
La stessa cosa avviene per i quattro generatori λ1 , µ1 , λ2 , µ2 di Z4 : ognuno di questi manda i due estremi
e (S 0 )) in o − o = 0 ∈ H (X 0 ) per cui d1 = 0. Essendo d e d
di D1 in o, ovvero ε0 (generatore di H
0
0
2
1
morfismi nulli si ottiene
H2 (C2 ) = Z ,
H1 (C2 ) = Z4 ,
H0 (C2 ) = Z .
Naturalmente, in modo del tutto analogo si ottiene H2 (Cg ) = Z , H1 (Cg ) = Z2g , H0 (Cg ) = Z (per esercizio,
convincersene).
Esempio 59. Nel §1, sezione “classificazione delle superfici compatte”, abbiamo visto due possibili realizzazioni del piano proiettivo reale come CW-complesso: quella dove si attacca il disco ad S 1 usando la sequenza λ2 e quella dove si attacca il disco ad un bouquet di due S 1 usando la sequenza λµλµ. Utilizzando
come al solito le stesse notazioni ivi utilizzate, quanto all’incollamento della 2-cella nel primo caso abbiamo
φ⋆ (I) = λ2 , ovvero d2 = 2, mentre nel secondo caso abbiamo φ⋆ (I) = λµλµ, ovvero d2 = (2, 2). Quanto
all’incollamento dello 1-scheletro allo 0-scheletro (che nel primo caso è costituito da un punto o mentre nel
secondo caso da una coppia di punti {o, p}), nel primo caso λ 7→ o − o, e nel secondo λ 7→ p − o, µ 7→ o − p
(si faccia un disegno, nel primo caso di un poligono con due lati, nel secondo di un quadrato, e si disegnino le
identificazioni). In definitiva, nei due casi l’omologia cellulare viene calcolata dalle successioni
Z
1
d
2
−→
Z
7→ 2
1
d
1
−→
Z
7→
0
Z
1
d
2
−→
7→
d
Z2
(2, 2)
1
−→
Z2
λ = (1, 0)
7→
7→
(1, −1)
µ = (0, 1)
(−1, 1)
Coerentemente col Teorema (52), calcolando l’omologia cellulare delle due realizzazioni del piano proiettivo reale come CW-complesso si arriva sempre allo stesso risultato, che è il risultato che già conosciamo
(cfr. esempio 40):
H0 P2 (R) = Z .
H1 P2 (R) = Z2 ,
H2 P2 (R) = 0 ,
71
Tornando al caso generale, diamo una formula che risponde al nostro proposito (cfr. inciso 57) di dire chi sono
i morfismi dn in termini di celle e morfismi di incollamento.
`
`
Lemma 60 (del bordo cellulare). Sia X un CW -complesso, X n = X n−1 Dαn e X n−1 = X n−2 Dβn−1 .
α
β
Posto Qnα := Dαn Sαn−1 e Qβn−1 := Dβn−1 Sβn−2 , modulo le identificazioni
Hn X n , X n−1
= Hn
W
α
Qnα
= ⊕ αZ
e
Hn X n−1 , X n−2
il morfismo dn del complesso cellulare Cell(X) assume la forma
dn :
L
αZ
−−−→
n celle α
e risulta
(dn )α, β
=
L
= Hn−1
W
α
Qβn−1
= ⊕ βZ
βZ
n−1 celle β
φ
qβ
α
X n−1 −−→ Qn−1
deg Sαn−1 −−→
β
(n.b. gli spazi Sαn−1 = Frontiera(Dαn ) e Qβn−1 = Dβn−1 /Sβn−1 sono entrambi n − 1 sfere), dove qβ è il
morfismo che contrae tutto tranne la n − 1 cella corrispondente all’indice β , i.e. contrae il complementare
◦
della cella aperta D βn−1 ⊆ X n−1 .
Dimostrazione (cenno). Si deve studiare come opera il morfismo dn := πn−1 ◦ δn (cfr. diagramma 50.5). Un
generatore di Hn (X n , X n−1 ) ∼
= ⊕αZ è rappresentato da una catena σ a valori in una n-cella Dαn . Tale
σ, tramite il morfismo di incollamento δn , va nel ciclo in Hn−1 (X n−1 ) rappresentato da ∂σ (attenzione,
non siamo più X n , in X n−1 quello indicato non è detto che sia un bordo), cfr. nota (§A2, 9.1). D’altro
canto ∂σ si fattorizza per Sαn−1 (frontiera della nostra cella Dαn ), del quale per quanto visto nella sezione
sull’omologia della sfera ne rappresenta il generatore dell’omologia. Il morfismo tramite il quale Sαn−1 va
in X n−1 è il morfismo di incollamento φα . Infine, calcolare l’immagine di ∂σ nella n−1-cella di indice β
significa applicare qβ .
Esempio 61. Lo spazio proiettivo reale Pn (R) può essere realizzato attaccando una cella in ogni dimensione
(fino ad n):
X 0 = {p} (un punto);
..
.
`
X k = X k−1 φ Dk ,
S k−1 ֒→ Dk
φy
dove φ è il morfismo 2:1 che identifica punti antipodali di S k−1 :
Pk−1 (R) ∼
= X k−1
..
.
Il complesso Cell Pn (R) della realizzazione di cui sopra di Pn (R) come CW-complesso è il complesso
dn =
(61.1)
Z
2, n pari
0, n dispari
−−−−−−−−−−−−−→ Z
d =2
d =0
d =2
d =0
. . . Z −−4−−→ Z −−3−−→ Z −−2−−→ Z −−1−−→
(grado n)
Z
(grado 0)
(dk = 2 per k pari e dk = 0 per k dispari).
Di conseguenza, i gruppi di omologia dello spazio proiettivo reale sono i gruppi
Z2 , k dispari
Z , n dispari
H 0 Pn (R) = Z ,
H k Pn (R) =
,
H n Pn (R) =
0 , k pari
0 , n pari
(questo per 1 < k < n − 1 )
.
72
Dimostrazione. Per il lemma (60) si ha
dk
=
φ
q
deg S k−1 −−→ Pk−1 (R) −−→ Pk−1 (R) Pk−2 (R) .
(∼
= S k−1 )
La restrizione di q alla k −1 cella aperta di Pk−1 (R) è un omeomorfismo sull’immagine (che chiameremo A) e
la composizione q ◦ φ contrae l’equatore di S k−1 ed identifica le due k − 1 sfere ottenute come risultato di tale
contrazione. Per calcolare il grado di q◦φ possiamo prendere un punto y ∈ A e, posto {x1 , x2 } = (q◦φ)−1 (y),
calcolare i gradi locali deg(q ◦ φ)|x1 e deg(q ◦ φ)|x2 . La funzione q ◦ φ è un omeomorfismo locale sia in x1
che in x2 = −x1 (per cui, in entrambi i punti avrà grado ±1). Resta da capire quali sono i valori corretti.
Poiché φ è invariante per antipodalità (e l’antipodalità scambia x1 con x2 ), si deve necessariamente avere
deg(q ◦ φ)|x1 = deg(−Id ) · deg(q ◦ φ)|x2 . D’altro canto per la (31.6) si ha deg(−Id ) = (−1)k−1+1 . In
definitiva, dk = ±2 per k pari e dk = 0 per k dispari.
Il fatto che per k pari risulti effettivamente dk = 2 (e non −2) è, in certo senso irrilevante: che sia dk = 2 o
dk = −2 l’omologia del complesso non cambia. Si tenga peraltro presente che i gruppi del nostro complesso
cellulare sono i vari gruppi ciclici Gk = Hk (X k , X k−1 ), il fatto che per k pari il morfismo dk porti “il”
generatore di Gk nel doppio “del” generatore di Gk−1 dipende da come sono stati scelti i generatori.
73
Omologia con coefficienti.
Nel paragrafo §A2, dato un complesso di catene libero (C• , ∂) ed un gruppo abeliano G, che interpretiamo
come Z-modulo, introduciamo il complesso
C• ⊗ G , ∂G := ∂ ⊗ IG
(IG denota l’identità su G)
detto complesso delle catene a coefficienti in G in quanto si ottiene considerando catene a coefficienti in G
piuttosto
P che negli interi Z. Questo non è altro che il complesso ottenuto considerando le espressioni del
tipo
ni σi con gli ni in G (invece che in Z) ed i σi , come sempre, simplessi singolari; cfr. (2.2), essendo
l’operatore di bordo ∂G definito dalla stessa formula che definisce ∂ (def. 2.3 e 3). Il gruppo G si chiama
gruppo dei coefficienti e l’omologia di questo nuovo complesso omologia a coefficienti in G.
Def. 65. Sia X uno spazio topologico e G un gruppo abeliano. I gruppi
Hn (X; G) := Hn C• (X) ⊗ G
si definiscono gruppi di omologia singolare di X a coefficienti in G .
Naturalmente, lo studente che non avesse ancora incontrato il prodotto tensoriale, può assumere la descrizione
di cui sopra come definizione del complesso delle catene a coefficienti in G.
Nota 65.1. Le definizioni ed i risultati visti nelle sezioni precedenti continuano ad essere validi per l’omologia a
coefficienti in G (funtorialità e passaggio modulo omotopia dei morfismi indotti in omologia, risultati sulle suddivisioni dei simplessi, successioni di Mayer-Vietoris e della coppia, escissione eccetera). Anche il Teorema (45),
l’osservazione (48) ed il Teorema (52) continuano a valere: l’omologia dei ∆-complessi, l’omologia simpliciale,
l’omologia cellulare e l’omologia singolare, tutte a coefficienti in G, coincidono. Al fine di provare quanto
affermato basti osservare che nelle varie dimostrazioni non si utilizza mai il fatto di lavorare con coefficienti
in Z. Attenzione: come dimostrano le considerazioni che seguono, quanto appena affermato non significa che
tensorizzando i gruppi d’omologia con G si ottiene l’omologia a coefficienti in G!
Consideriamo l’esempio del piano proiettivo reale. Se tensorizziamo il complesso C•∆ (X) (cfr. 40′ ) con Z2 ,
ovvero uno dei due complessi C•cell (X) dell’esempio (59), si ottiene il complesso
C•∆ (X; Z2 )
:=
C•∆ (X) ⊗ Z2 ,
ovvero il complesso C•cell (X; Z2 )
:=
Cell (X) ⊗ Z2 ,
Ricordando che per complessi di catene liberi tensorizzare con Z2 significa sostituire le varie copie di Z
con altrettante copie di Z2 , il complesso C•∆ (X; Z2 ) è sempre il complesso (40′ ), ma con i vari generatori
nel gruppo Z2 (idem per C•cell (X; Z2 )). Calcolando l’omologia di uno qualsiasi dei complessi in questione e
tenendo presente che le varie teorie omologiche coincidono (nota 65.1), si ottiene
H0 C• (X; Z2 ) ∼
H1 C• (X; Z2 ) ∼
(66)
H2 C• (X; Z2 ) ∼
= Z2
= Z2 ,
= Z2 ,
(lasciamo la verifica come facile esercizio, che consigliamo di fare almeno nel caso più semplice, quello del
primo dei due complessi nell’esempio 59).
Dalla (66) si evince che il gruppo H2 (C• (X; Z2 )) (che è Z2 ) non coincide con il gruppo H2 (X) ⊗ Z2 (che è il
gruppo zero). D’altro canto il complesso C• (X; Z2 ) si definisce esclusivamente a partire dal complesso C• (X),
questo potrebbe suggerire che quest’ultimo complesso possa contenere dell’informazione non rilevabile dal mero
dato dell’omologia a coefficienti interi; ma non è cosı̀, l’omologia a coefficienti in G può effettivamente essere
recuperata dall’omologia a coefficienti interi (teorema dei coefficienti universali 67). Ciononostante lavorare
con coefficienti può avere dei vantaggi dovuti al fatto che, in un certo senso, l’informazione è organizzata in
maniera diversa.
Il già citato teorema dei Coefficienti Universali (§A2, 34), formula che esprime l’omologia a coefficienti in G
di un complesso di catene, in termini dell’omologia a coefficienti interi, è un risultato di algebra omologica
(cfr. §A2, 34). Per comodità enunciamo cosa ci dice nel caso del complesso delle catene dei simplessi singolari
di uno spazio topologico X :
Teorema 67 (dei Coefficienti Universali). Sia X, uno spazio topologico e G un gruppo
abeliano. Per ogni intero n c’è una successione esatta naturale
0 −−−→ Hn (X) ⊗ G −−−→ Hn (X; G) −−−→ Tor Hn−1 (X), G −−−→ 0
Dimostrazione. Si applichi il Teorema (§A2, 34) al complesso C• (X).
74
Formula di Künneth
La formula di Künneth esprime l’omologia del prodotto di due spazi topologici in termini
delle omologie dei singoli spazi.
Teorema 70. Siano X ed Y due spazi topologici. Ci sono un isomorfismo naturale
(70.1)
Hn (X × Y ) ∼
= Hn C• (X) ⊗ C• (Y )
ed una successione esatta naturale
L
ξ
0 −−→
Hi (X) ⊗ Hj (Y ) −−→ Hn (X × Y ) −−→
i+j = n
L
p+q = n−1
Tor Hp (X), Hq (Y ) −−→ 0
Il complesso C• (X) ⊗ C• (Y ) viene definito nell’appendice di algebra omologica (cfr. §A2, 35).
Dimostrazione. L’isomorfismo (70.1) è la “parte topologica” della formula di Künneth:
i complessi di catene
C• (X × Y )
e
C• (X) ⊗ C• (Y )
sono complessi di catene omotopi.
Questo risultato non lo dimostriamo, ci limitiamo a dare l’idea della costruzione che c’è sotto: dati due simplessi
singolari σ : ∆i → X e τ : ∆j → Y si considera σ × τ : ∆i × ∆j → X × Y , triangolando ∆i × ∆j si
ottiene una i + j catena in X × Y ; si ottiene cosı̀ un morfismo di complessi C• (X) ⊗ C• (Y ) −→ C• (X × Y )
che risulta essere un’equivalenza omotopica di complessi di catene, ne segue che anche il primo dei due calcola
l’omologia dello spazio X × Y .
La successione esatta segue dalla “parte algebrica” della formula di Künneth, i.e. la successione esatta del
Teorema (§A2, 36)
L
L
ξ
Hi (C• ) ⊗ Hj (D• ) −−→ Hn (C• ⊗ D• ) −−→
Tor Hp (C• ), Hq (D• ) −−→ 0 ,
0 −−→
i+j = n
p+q = n−1
sostituendo Hn (C• (X) ⊗ C• (Y )) con Hn (X × Y ) (per C• = C• (X), D• = C• (Y )).
75
§ 4.
Coomologia.
Partendo da uno spazio topologico X , si considera il complesso di catene dei simplessi singolari (cfr. §3, 2)
∂n+1
∂n
. . . −−−→ Cn+1 (X) −−−→ Cn (X) −−−→ Cn−1 (X) −−−→ . . .
(C• (X), ∂) :
(che è un complesso di catene libero, i.e. costituito da gruppi abeliani liberi) e, fissato un gruppo abeliano G,
si può considerare il complesso duale a valori in G (cfr. §A2, 42)
C • (X; G), d
(1)
:=
(Hom(C• (X), G),
:
dn−1
dn
. . . −−→ C n−1 (X; G) −−−→ C n (X; G)
∂∗ )
−−−→ C n+1 (X; G)
:=
:=
:=
Hom(Cn−1 (X), G)
Hom(Cn (X), G)
Hom(Cn+1 (X), G)
−−→ . . .
Nota 1.1. Una n-cocatena ϕ ∈ C n (X; G) è una funzione definita sulle n-catene (che assume valori in G).
∗
Ricordiamo che l’operatore di bordo è l’operatore d = ∂ (cfr. §A2, 40.1 e def. 42), in formule:
d ϕ (σ)
:=
ϕ (∂σ) ,
dove ϕ ∈ C n (X; G) e σ ∈ Cn+1 (X).
Del complesso (1) se ne può calcolare la coomologia (cfr. §A2, 43). Si dà la definizione che segue:
Def. 2. Dati X e G come sopra, i gruppi di coomologia di X a coefficienti in G sono i
gruppi di coomologia del complesso (1), chiamato complesso delle cocatene di X :
∗
H n(X; G) := H n Hom(C• (X), G), ∂ .
Il Teorema dei coefficienti universali (§A2, 45) ci dice che c’è una successione esatta naturale
j
q
(2)
0 −−→ Ext Hn−1 (X), G −−→ H n(X; G) −−→ Hom Hn (X), G −−→ 0
In appendice §A2 viene dimostrato il Teorema e viene data una descrizione dettagliata dei morfismi j e
q. Per comodità, ricordiamo alcuni punti cruciali. Quanto al morfismo q, una n-classe di coomologia è
rappresentata da una funzione ϕ, definita sulle n-catene, che va a zero tramite dn , ovvero che svanisce sugli
n-bordi (= Im∂n+1 ). La sua immagine q(ϕ) è quella stessa funzione vista come funzione definita sulle classi
di omologia (n-cicli modulo n-bordi). Poiché ogni morfismo definito sugli n-cicli si estende alle n-catene, il
morfismo q è suriettivo. D’altro canto può accadere che il morfismo q non sia iniettivo: gli n-cocicli che
hanno immagine nulla in Hom(Hn (X), G), possono essere un po’ di più degli n-cobordi (cfr. §A2, 43.1, 45.2
e dimostrazione del Teorema 45).
Praticamente tutti i risultati visti in omologia valgono anche in coomologia. Vediamone i principali.
(3.1) Una funzione continua f : X −→ Y tra spazi topologici induce un morfismo di complessi
♯
♯
f : C • (Y ; G) −−→ C • (X; G) ,
f ϕ (σ) := ϕ(f⋆ σ)
che commuta con l’operatore di cobordo d e pertanto induce dei morfismi in coomologia
f⋆ :
H n (Y ) −−→ H n (X)
f
g
(3.2) Naturalmente i morfismi indotti in coomologia sono controvarianti: date X −→ Y e Y −→ Z si ha
♯
(g ◦ f )
♯
♯
= f ◦g ,
♯
IdX = IdC • (X) ;
(g ◦ f )⋆ = f ⋆ ◦ g ⋆ ,
⋆
IdX = IdH n (X) , ∀ n .
(3.3) Data un’inclusione j : A ֒→ X , dualizzando la successione esatta corta di complessi di catene (§3, 23.1)
si ottiene la successione esatta corta di complessi di cocatene
0
C • (X, A; G)
−−−→
(:=
−−−→
C • (X; G)
j
♯
−−−−→
C • (A; G)
−−−→
0
Hom(C• (X, A), G))
(si provi l’esattezza, per esercizio). Per l’inciso (§A2, 3) ed il lemma (§A2, 9) c’è una successione esatta
76
lunga in coomologia chiamata successione esatta lunga della coppia in coomologia
j⋆
... −−→ H n (X, A; G) −−→
H n (X, G) −−→ H n (A; G) −−→ H n+1 (X, A; G) −−→ ...
♯
♯
(3.4) Funzioni f, g : X −→ Y omotope, inducono morfismi f , g di complessi di cocatene omotopi e, di
conseguenza, inducono lo stesso morfismo in coomologia, i.e. f ⋆ = g ⋆ (lo stesso risultato vale anche
per le coppie).
(3.5) Nelle ipotesi del Teorema di Escissione (§3, 27), i.e. data una coppia (X, A) e dato Z soddisfacente
◦
Z ⊆ A, vale l’analogo dell’escissione in coomologia
j⋆ :
H n (X, A; G)
−−−→
H n (X r Z, A r Z; G)
è un isomorfismo, per ogni n .
dove j : (X r Z, A r Z) ֒→ (X, A) denota l’inclusione di coppie.
(3.6) Dato un ricoprimento aperto U = {A, B} di uno spazio X , dualizzando la successione esatta corta
di complessi di catene (§3, 17) si ottiene la successione esatta corta di complessi di cocatene
C • U (X; G)
0 −−→
(:=
−−→ C • (A; G) ⊕ C • (B; G) −−→ C • (A ∩ B; G) −−→ 0
Hom(C•U(X), G))
Questa, induce una successione esatta lunga in coomologia (inciso §A2, 3 e lemma §A2, 9):
. . . −→ H n (X; G) −→ H n (A; G) ⊕ H n (B; G) −→ H n (A ∩ B; G) −→ H n+1 (X; G) −→ . . .
dove abbiamo potuto omettere la dipendenza dal ricoprimento U (primo e quarto termine) grazie
all’equivalenza omotopica dei complessi di cocatene C • U (X; G) ≃ C • (X; G) ottenuta dualizzando
l’equivalenza omotopica della Proposizione (§3, 15)).
Per il Teorema dei coefficienti universali, “l’informazione racchiusa” nella coomologia (che a priori è determinata
dal complesso di catene ma non dalla sua omologia) può essere recuperata dall’omologia. Il fatto che tale
informazione sia organizzata in maniera leggermente diversa rende la coomologia più funzionale, e consente di
definire un’utile struttura aggiuntiva in modo naturale.
Consideriamo coefficienti in un anello commutativo R (siamo interessati esclusivamente agli anelli che seguono:
R = Z, Zp , Q, R, C). Osserviamo che C • (X; R) ha una naturale struttura di R-modulo. (L’ipotesi che
R sia un anello commutativo non è necessaria ai fini della definizione di prodotto cup né ai fini della maggior
parte delle affermazioni che faremo).
Def. 4. Sia R un anello commutativo. Si definisce il prodotto cup di cocatene
`
:
C r (X; R) × C s(X; R) −−−→ C r+s(X; R)
ponendo
ϕ ` ψ : Cr+s (X)
P
ni σi
−−−→
7→
P
R
ni ϕ([e0 , ..., er ]σi ) · ψ([er , ..., er+s ]σi )
dove ϕ ∈ C r (X; R), ψ ∈ C s (X; R), e0 , ..., er +s sono i vertici del simplesso standard ∆r+s , i σi sono
r + s simplessi singolari, i vari [ ... ]σi sono simplessi singolari definiti dalla notazione (§3, 13.1), il prodotto
“·” denota il prodotto in R.
Nota 4.1. Il prodotto cup è associativo. È utile osservare, una volta per tutte, che risulta
(ϕ1 ` ... ` ϕm )(σ) =
ϕ1 ([e0 , ..., er1 ]σ ) · ϕ2 ([er1 , ..., er1 +r2 ]σ ) · ... ,
P
ϕi ∈ C (X; R), σ è un
ri simplesso singolare.
ri
Nota 4.2. Dalla definizione appare evidente che il prodotto cup è distributivo, o meglio R-lineare in ognuno
dei due argomenti: fissato uno dei due argomenti, il prodotto cup è un morfismo di R-moduli nell’altro
argomento, i.e. le due funzioni - ` ψ : ϕ 7→ ϕ ` ψ e ϕ ` - : ψ 7→ ϕ ` ψ sono morfismi di R-moduli.
Nota 4.3. Il prodotto cup è compatibile con i morfismi indotti: data f : Y −→ X e date ϕ, ψ come
sopra, si ha
♯
♯
♯
f ϕ ` f ψ = f (ϕ ` ψ)
77
Lemma 5. Date ϕ e ψ come nella definizione (4), risulta
(5.1)
d(ϕ ` ψ)
=
dϕ ` ψ + (−1)r ϕ ` dψ .
Dimostrazione. È sufficiente verificare che le cocatene
ai due lati dell’uguaglianza agiscono allo stesso modo
sugli r+s+1 simplessi singolari. Si ha d(ϕ ` ψ) (σ) = (ϕ ` ψ)(∂σ) = ... = dϕ ` ψ + (−1)r ϕ ` dψ (σ)
(lasciamo i dettagli per esercizio).
Come corollario del Lemma (5) si deduce che il prodotto cup è ben-definito in coomologia:
Cor./Def. 6. C’è un’applicazione ben definita, sempre indicata come prodotto cup,
`
: H r (X; R) × H s(X; R)
−−−→
H r+s(X; R)
7→
ϕ ` ψ
(ϕ, ψ)
Dimostrazione. Se ϕ e ψ sono cocicli (i.e. hanno cobordo nullo), dalla (5.1) segue la relazione d(ϕ ` ψ) = 0,
i.e. che ϕ ` ψ è anch’essa un cociclo. Se oltre ad essere cocicli una delle due è un cobordo, e.g. ϕ = dη,
allora ϕ ` ψ = (dη) ` ψ = d(η ` ψ), i.e. ϕ ` ψ è un cobordo (stessa cosa se è ψ ad essere un cobordo).
Naturalmente il prodotto cup in coomologia eredita tutte le proprietà del prodotto cup definito a livello di
rappresentanti, (cfr. note 4.1, 4.2 e 4.3). Date f : Y → X , ϕ e ψ come sopra, la (4.3) assume la forma
(7)
f ⋆ϕ ` f ⋆ψ
=
f ⋆ (ϕ ` ψ),
Lemma 8. Date ϕ ∈ H r (X; R) e ψ ∈ H s(X; R), risulta
(8.1)
ϕ`ψ
=
(−1)
rs
ψ`ϕ
(qui si usa la commutatività di R).
Dimostrazione. Fissati dei rappresentanti per le nostre classi di coomologia, che per abuso di notazione continuiamo a chiamare ϕ e ψ, e dato un r+s simplesso singolare σ = [e0 , ..., er+s ]σ , per la definizione (4)
abbiamo
(ϕ ` ψ)(σ) = ϕ [e0 , ..., er ]σ · ψ [er , ..., er+s ]σ
(ψ ` ϕ)(σ) = ψ [e0 , ..., es ]σ · ϕ [es+1 , ..., er+s ]σ
= (ϕ ` ψ) T (σ)
= ϕ [es+1 , ..., er+s ]σ · ψ [e0 , ..., es ]σ
dove T è la trasformazione definita ponendo T (σ) = [es+1 , ..., er+s , e0 , ..., es ]σ . Entrando nella combinatoria
delle trasformazioni che permutano i vertici dei simplessi singolari si deduce che T può essere interpretata
come moltiplicazione per (−1)rs , o meglio si deduce la relazione T (σ) = (−1)rs σ modulo bordi. Da ciò
segue la tesi. (Il conto riguardante la combinatoria menzionata è abbastanza pesante e forse poco interessante,
per questa ragione lo omettiamo).
78
◦
∼
◦
Le cocatene, per definizione, agiscono sulle catene. Ciò può essere visto in termini duali e, per m ≥ k, si
generalizza ad una azione delle m-catene sulle k-cocatene, a valori nelle m − k catene (di seguito, omettiamo
dalla notazione il gruppo dei coefficienti, che per il momento assumiamo sia il gruppo degli interi Z):
Oss./Def. 9. Dato uno spazio topologico X e due interi k ≤ m, si definisce il prodotto cap
ponendo
Cm (X) × C k (X) −−−→
Cm−k (X)
(9.1)
(σ ⌢ ϕ)
7→
ϕ [v0 , ..., vk ]φ · [vk , ..., vm ]φ
dove σ = [v0 , ..., vm ]φ (cfr. notazione §3, 13.1). Naturalmente la definizione si intende estesa
alle m-catene per linearità. Il prodotto cap soddisfa la formula
(9.2)
∂(σ ⌢ ϕ)
=
(−1)k (∂σ ⌢ ϕ − σ ⌢ dϕ)
Come funzione a valori in Hm−k (X), il prodotto cap è ben definito a livello di classi di omologia
e coomologia, i.e. induce un morfismo
(9.3)
Hm (X) × H k (X)
−−−→
Hm−k (X)
Infine, soddisfa la cosiddetta Formula di Proiezione:
(9.4)
f⋆ (σ) ⌢ ψ
=
f⋆ (σ ⌢ f ⋆ ψ)
dove f : X −→ Y denota una funzione continua, σ ∈ Hm (X), ψ ∈ H k (Y ).
Dimostrazione. La (9.2) si verifica con un conto esplicito, che lasciamo per esercizio. Dalla formula (9.2), con
un argomento analogo a quello della dimostrazione del cor. (6), segue immediatamente che il prodotto cap
è ben definito a livello di classi di omologia e coomologia (lasciamo questo passaggio per esercizio). Infine,
la Formula di Proiezione (9.4) segue dalle definizioni: se σ è un m-simplesso (in X ) e ψ ∈ C k (Y ), si ha
f⋆ σ = f ◦ σ (cfr. §3, 9) ed f ⋆ ψ = ψ ◦ f⋆ (cfr. §4, 3.1).
Nota 9.5. Sia σ un m-simplesso, ϕ ∈ H m (X) (n.b.: k = m). Si ha σ ⌢ ϕ = ϕ(σ){v}, dove v è uno
(l’ultimo) dei vertici di σ. Di conseguenza, a livello di classi di omologia e coomologia, per m = k il prodotto
cap si interpreta come segue: il valore ϕ(σ), che a priori è solo un intero, viene visto come l’elemento in H0 (X)
corrispondente alla componente
P connessa individuata da σ (naturalmente, quanto osservato si generalizza nel
modo ovvio alle m-catene
ni σi ).
79
§ 5.
Varietà Topologiche.
Assumiamo che chi legge abbia un minimo di familiarità con la nozione di varietà topologica. Per comodità ricordiamo la definizione: una varietà topologica di dimensione n è uno
spazio topologico di Hausdorff dove ogni punto ammette un intorno U omeomorfo ad Rn , un
omeomorfismo ϕ : U → Rn si chiama carta locale.
L’ipotesi che lo spazio sia di Hausdorff serve ad escludere dalla definizione alcune patologie, il tipico esempio
n
è quello di una copia di Rn con un punto doppio (cioè lo spazio
` chen si ottiene nconsiderando due copie di R
n
ed identificandole ovunque eccetto che in un punto, i.e. R
Id R , U = R r {p} (cfr. §1, 1).
U
Orientazione.
◦
Iniziamo con alcune considerazioni concernenti Rn (n ≥ 1). Per ogni p ∈ D n ⊆ Rn esistono degli isomorfismi
naturali
Z, k = n
n−1
n
n
n
∼
∼
∼
e
e
) =
(1)
Hk (R , R r {p}) = Hk−1 (R r {p}) = Hk−1 (S
0 , k 6= n
dove: il primo è dato dalla successione della coppia; il secondo dalla retrazione di deformazione di Rn r {x}
su S n−1 (cfr. §2, 2.7); il terzo dal calcolo dell’omologia della sfera (della quale, per k = n, ne è stato dato il
generatore canonico). Naturalmente, quanto sopra si estende a p ∈ Rn arbitrario: è sufficiente considerare
un disco più grande. In particolare, dati due punti in Rn , c’è un isomorfismo naturale tra i corrispondenti
gruppi di n-omologia locale. Per utilizzi futuri, è utile osservare che tale isomorfismo si caratterizza in quanto
composizione degli isomorfismi indicati
Hn (Rn , Rn r B)
∼
=
(1.1)
ւ
Hn (Rn , Rn r {p})
∼
ց=
Hn (Rn , Rn r {q})
(dove: B è un n-disco, p, q ∈ B, i due
isomorfismi sono i morfismi indotti dalle
due inclusioni di coppie)
Detto in altri termini, abbiamo un criterio che consente un confronto “immediato” dei gruppi di omologia
locale in due punti distinti p, q ∈ Rn : due elementi σp ∈ Hn (Rn , Rn r {p}) e σq ∈ Hn (Rn , Rn r {q}) si
corrispondono se provengono da uno stesso elemento in un qualche Hn (Rn , Rn r B) ∼
= Z (B come sopra).
Sia ora X una varietà topologica di dimensione n ≥ 1, x ∈ X un punto e ϕ : U → Rn una carta locale
intorno ad x (i.e. ϕ è un omeomorfismo soddisfacente ϕ(x) = 0). Abbiamo degli isomorfismi
ϕ
∼
∼
(1.2)
Hn (X, X r {x})
Hn (U, U r {x}) −−−⋆→ Hn (Rn , Rn r {0})
Z
=
=
(cor. §3, 29)
(cfr. 1)
L’isomorfismo ϕ⋆ dipende dalla carta locale ed i due isomorfismi esistenti a priori sono ottenibili entrambi,
per cui il gruppo d’omologia locale Hn (X, X r {x}) (def. §3, 29.1) non ha un generatore canonico. Diamo
la seguente definizione.
Definizione 2. Sia X una varietà topologica di dimensione n ≥ 1 ed x ∈ X un punto.
• Un’orientazione locale di X in x è la scelta di un generatore del gruppo di omologia locale Hn (X, X r{x});
• due orientazioni locali ox ed oy si dicono concordi relativamente alla carta locale ϕ : U → Rn (che si
assume contenga i punti x ed y), se risulta ϕ⋆ ox = ϕ⋆ oy . In questo caso scriveremo
ox ∼ϕ oy
l’uguaglianza ϕ⋆ ox = ϕ⋆ oy è da intendersi via l’isomorfismo canonico (1.1) Hn (Rn, Rn r {ϕ(x)}) ∼
=
Hn (Rn, Rn r {ϕ(y)}) .
• Un’orientazione (globale) di X è una scelta di un’orientazione locale ox per ogni x ∈ X soddisfacente
una delle proprietà che seguono (tra loro equivalenti):
i) ogni coppia ox ed oy è concorde relativamente ad ogni carta locale contenente x ed y;
ii)
esistono carte locali ϕα : Uα → Rn che ricoprono X tali che ox ∼ϕα oy , ∀ α, ∀ x, y ∈ Uα ;
e −→ X (definito sotto, cfr. inciso 2.2).
iii) x 7→ (x, ox ) è una sezione globale del rivestimento π : X
• X si dirà orientabile se ammette un’orientazione globale.
80
Quanto osservato sopra (cfr. 1.1 e successiva considerazione), si traduce nel criterio che segue:
Criterio 2.1. Data X come sopra, ϕ : U −→ Rn carta locale, x, y ∈ U ,
(
esistono B ⊆ U con ϕ(B) = “disco” ⊆ Rn , η ∈ Hn (U, U r B)
ox ∼ϕ oy
⇐⇒
(x)
(y)
tali che ox = j⋆ (η) , oy = j⋆ (η)
dove j (x) denota l’inclusione di coppie j (x) : (U, U rB) ⊆ (U, U r{x}) (e j (y) è analoga).
e l’insieme delle coppie (x, o ), essendo o un’orientazione locale in x. Consideriamo la
Inciso 2.2. Sia X
x
x
corrispondente proiezione naturale 2:1
2:1
e := (x, ox ) ox orientazione locale in x
−−−→ X
π : X
e ha una naturale struttura di varietà topologica rispetto alla quale π è un rivestimento
Si ha che l’insieme X
2:1 di varietà, dove gli aperti delle carte locali di X sono ben rivestiti. Infatti, se ϕ : U → Rn è una carta
locale, il “concordare relativamente a ϕ” ci consente di spezzare π −1 (U ) in due insiemi in corrispondenza
biunivoca con U tramite π:
−
π −1 (U ) = U + ∪ U − , U + := {(x, ox ) | x ∈ U, ox = ϕ−1
:= {(x, ox ) | x ∈ U, ox = ϕ−1
⋆ (1)}, U
⋆ (−1)}
dove 1 denota il generatore canonico di H n (Rn , Rn − {p}), per ogni p. Naturalmente, −1 denota il suo
opposto.
Esercizio 2.3. Si verifichi che i), ii) e iii) sono equivalenti. (Suggerimento: “i) ⇒ ii)” è banale, provare
che “ii) ⇒ iii)” e che “iii) ⇒ i)” di fatto si riduce a verificare che l’inciso 2.2 definisce effettivamente un
rivestimento di varietà soddisfacente le proprietà ivi indicate). Si osservi che come corollario immediato si
e −→ X è un rivestimento banale, i.e. X
e è unione disgiunta
deduce che X è orientabile se e solo se π : X
e sia sconnessa).
di due copie di X (ciò, nel caso in cui X è una varietà connessa, equivale a che X
Osserviamo quanto segue.
(2.4) Dalla ii) segue immediatamente che ogni aperto di Rn è orientabile (per esercizio).
(2.5) Dalla i) segue facilmente che il nastro di Möbius non è orientabile:
2
1
ℓ
•
∗
σ
2
•
1
τ
ℓ
0
0
∗
Nella figura (che abbiamo ripetuto due volte per chiarezza), il 2-simplesso
σ (vertici ordinati come indicato), genera un opportuno H2 (U, U rB) con
U carta locale e B palla contenente i due punti “•” e “∗”. Lo stesso vale
per τ per una qualche carta locale V . Nonostante ciò, σ e τ definiscono
la stessa orientazione sul punto “•” e orientazioni opposte sul punto “∗”
(si osservi come “gira” il percorso “012” intorno ai due punti “•” e “∗”
...nella figura a destra si faccia attenzione alle identificazioni: si guardi ℓ).
Ne segue che se le orientazioni locali dei due punti “•” e “∗” sono concordi relativamente ad una delle due
carte locali (U e V ), necessariamente non lo sono rispetto all’altra.
In (1) abbiamo fissato degli isomorfismi, va da se che sono quelli che si utilizzano per definire l’orientazione
canonica di Rn :
Def. 2.6. Si definisce l’orientazione canonica di Rn scegliendo
ox ←→ 1 tramite l’isomorfismo canonico Hn Rn , Rn r {x}
per ogni x ∈ Rn .
∼
= Z
Esercizio 2.7. Si verifichi che l’inclusione σ : ∆n ֒→ Rn (∆n = n-simplesso standard) è un rappresentante
dell’orientazione canonica ox per ogni x interno a ∆n .
Naturalmente σ può essere dilatato e traslato: anche σ ′ := λσ + µ : ∆n −→ Rn (0 < λ ∈ R, µ ∈ Rn ) è
un rappresentante dell’orientazione canonica (per i punti interni all’immagine di σ ′ ).
e è orientabile (sempre).
Proposizione 3. Sia X una varietà topologica. La varietà X
e scegliendo ox come orientazione locale nel punto (x, ox ).
Dimostrazione. Definiamo un’orientazione globale di X
81
Classe Fondamentale.
Sia X una varietà topologica di dimensione n ≥ 1. Esiste un rivestimento naturale di
varietà topologiche
e om.loc. :=
X
(x, σx ) σx ∈ Hn (X, X r {x})
(4)
π y
X
e om.loc. è solo
Per quel che concerne la struttura di rivestimento topologico dell’oggetto introdotto (a priori X
un insieme), la costruzione è di fatto quella già vista nell’inciso (2.2). In effetti possiamo osservare subito che
insiemisticamente risulta
•
e om.loc. = { (x, 0)} ∪· ∪· { (x, ±co )} = X S X
e
(4.1)
X
(N∗ := N r {0})
x
∗
c∈N
c ∈ N∗
dove ox denota un generatore dell’omologia locale in x e le varie unioni sono unioni disgiunte (abbiamo una
e per ogni c ∈ N∗ ). Questa scrittura ci consente di
copia di X, che corrisponde a σx = 0, ed una copia di X
e om.loc. come unione disgiunta di rivestimenti, quindi di vederlo come rivestimento topologico.
vedere l’insieme X
e om.loc. :
Naturalmente possiamo essere diretti nell’introdurre la struttura topologica di X
se ϕ : U → Rn è una carta locale, scriviamo
(4.2)
π −1 (U ) = {(x, m) | m ∈ Z} = U × Z ,
(♣)
n
n
m := ϕ−1
⋆ (m) , m ∈ Hn R , R r {p} = Z
(come già sottolineato più volte, l’identificazione (♣) è canonica, non dipende da p ∈ Rn ). Quindi, tramite
l’identificazione (4.2), dotiamo π −1 (U ) della struttura di U × Z di rivestimento banale di U . Ripetendo
questa operazione per ogni carta locale ϕ : Uϕ → Rn , abbiamo un rivestimento banale Uϕ × Z di Uϕ per
ogni aperto Uϕ . Questi rivestimenti “locali-banali” si raccordano in un rivestimento di X . Infatti, date due
carte locali ϕ : U → Rn , ψ : V → Rn ed un punto x ∈ U ∩ V , dal diagramma di isomorfismi
Hn (U ′ , U ′ r B)
ր Hn (U, U r B) ց
H (X, X r B) ,
ց H (V, V r B) ր n
n
U ∩ V ⊇ U′ ⊇ B ⊇
◦
B
∋ x,
(=: Ux )
(U ′ carta locale, B disco in U ′ ), diagramma fornito dall’escissione, si evince che le due carte locali, o meglio
le due strutture di rivestimento banale π −1 (U ) = U × Z e π −1 (V ) = V × Z, inducono la stessa struttura di
◦
rivestimento banale su π −1 (Ux ), Ux := B (quella indotta dalla carta U ′ ).
Fissiamo alcune conseguenze immediate di quanto visto sopra.
e om.loc. è banale se e solo se X
e è banale, i.e. se e solo se X è orientabile;
(4.3) Il rivestimento X
(4.4) gli aperti delle carte locali sono aperti ben rivestiti per ragioni tautologiche;
◦
(4.5) localmente, e.g. in B (B “disco” ⊆ U “carta locale”), le sezioni di π sono definite dagli elementi
η ∈ Hn (U, U r B): un tale η definisce la sezione locale x 7→ (x, j (x) (η)), dove j (x) : (U, U r B) ⊆
(U, U r {x}) denota l’inclusione di coppie.
Oss. 4.6. Un elemento σ ∈ Hn (X) definisce una sezione globale
e om.loc. , sσ (x) = x, ηx (σ)
sσ : X −→ X
dove ηx : Hn (X) −→ Hn X, X r {x} denota il morfismo della successione della coppia.
Dimostrazione. Il morfismo ηx si fattorizza per Hn (X, X r B) ∼
= Hn (U, U r B), dove U è una carta locale
e B ⊆ U un disco. Dalla (4.5) segue la continuità locale di s nel punto x .
82
Lemma 5. Sia X una varietà topologica di dimensione n, K ⊆ X un compatto.
i)
e om.loc. è una sezione globale di π. Allora
Se s : X −→ X
∃ ! σ ∈ Hn (X, X r K)
ii) Hi (X, X r K) = 0 ,
tale che
j⋆K, x (σ) = sx , ∀ x ∈ K
∀ i > n.
La notazione usata è la seguente: sx è definito da s(x) = (x, sx ), j K, x è l’inclusione di coppie (X, X rK) ⊆
(X, X r {x}) e j⋆K, x : Hn (X, X r K) −→ Hn (X, X r {x}) il morfismo indotto in omologia in grado n.
Dimostrazione. L’idea è quella di provare il lemma per gradi: lo si prova
Step 1. per K = B, disco in una qualche carta locale U ;
Step 2. per K = ∪Bi , unione finita di dischi e punti, tutti in una qualche carta locale U ;
Step 3. per K ⊆ U , compatto, sempre in una qualche carta locale U ;
Step 4. per K arbitrario.
Lo step 1 è banale. Gli step 2 e 4 si provano allo stesso modo: per induzione sul numero degli elementi
dell’unione, la successione di Mayer Vietoris mostra che se il lemma (sia i) che ii)) vale per due compatti e
la loro intersezione, allora vale anche per la loro unione. Quanto allo step 3, la ii) è evidente e per quel che
concerne l’esistenza di σ in i) è sufficiente considerare un disco che contenga K . Per provare l’unicità di un
elemento σ ∈ Hi (X, X r K) come in i), si ricopre K con dei dischi che non intersecano il supporto del
bordo di σ, con ciò ci si riconduce alla tesi dello step precedente.
Corollario 5.1. Se X è connessa, non compatta, allora Hi (X) = 0 ,
∀ i ≥ n.
Dimostrazione. Procediamo per assurdo. Se esiste una classe non nulla in Hi (X), scelto un rappresentante
σ e posto K = supporto(σ), siamo in grado di trovare un aperto U ⊇ K , con U anch’esso compatto.
Affermiamo che la tesi segue dal lemma e dal diagramma
0
=
(i ≥ n)
Hi+1 (X, X r T ) −→ Hi (X r T, X r U ) −→ Hi (X, X r U )
x
x
∼
=
Hi (U, ∅)
σ.
−→
(T := U r U )
Hi (X)
σ
Innanzi tutto, σ può essere considerato come elemento σ . in Hi (U, ∅) (dove continua ad essere non nullo).
D’altro canto, per il lemma 5, si ha Hi (X, X r U ) = 0 per i > n. Per i = n, il nostro σ definisce una
sezione sσ (cfr. oss. 4.6); risulta sσ = 0, infatti sσ (x) = 0 per x ∈ X r K (che è non vuoto), essendo X
connessa, l’annullarsi (= “coincidere con la sezione nulla”) in un punto implica l’annullarsi ovunque. Per il
lemma 5, unicità in i), sσ = 0 implica che σ si annulla in Hn (X, X r U ). In ogni caso (per i ≥ n), σ si
annulla in Hi (X, X r U ). Ciò è assurdo per l’esattezza della riga in alto.
Teorema 6. Sia X una varietà compatta, connessa, di dimensione n. Allora
i) se X è orientabile, si ha Hn (X) ∼
= Z e
ηx : Hn (X) −→ Hn (X, X r {x}) è un isomorfismo per ogni x ∈ X ;
ii) se X non è orientabile, si ha Hn (X) = 0 .
In ogni caso (anche per varietà non connesse e/o non compatte), si ha Hi (X) = 0 , i > n.
• Come nella (4.6), ηx : Hn (X) −→ Hn (X, X r {x}) denota il morfismo della successione della coppia.
Dimostrazione. Iniziamo con l’ultimissima affermazione: proviamo che ogni componente connessa X ′ di X ha
omologia nulla nei gradi strettamente maggiori di n (per X, eventualmente, non connessa e/o non compatta).
Se X ′ non è compatta, ciò segue dal corollario (5.1); se invece X ′ è compatta, ciò segue dal lemma (5) con
83
K = X ′ . Per l’osservazione (§3, 7.1) abbiamo concluso.
e om.loc. tale che s(x) ∈ Hn (X, X r {x}) è
Proviamo la i). Un’orientazione è una sezione globale s : X → X
un generatore per ogni x ∈ X . Il lemma (5), sempre per K = X , ci dice che esiste, unico, σ ∈ Hn (X) tale
che ηx (σ) = s(x) per ogni x ∈ X. Di conseguenza, il sottogruppo hσi generato da tale σ è isomorfo a Z
e va isomorficamente su ogni Hn (X, X r {x}). Se per assurdo esiste σ ′ ∈ Hn (X) r hσi, esiste una costante
c tale che la sezione sσ′ −cσ (cfr. oss. 4.5) si annulla in un punto fissato x ∈ X e, essendo X connessa, si
annulla in ogni x ∈ X . D’altro canto, per il lemma 5, sσ′ −cσ = 0 implica σ ′ − cσ = 0.
Proviamo la ii). Poiché X non è orientabile e connessa (ciò serve ad escludere che possa avere una qualche
componente orientabile), l’unica sezione globale di π è la sezione nulla. Di conseguenza, ogni elemento
σ ∈ Hn (X) definisce la sezione nulla di π. Per l’unicità in lemma 5, i), si deve avere σ = 0.
Def. 7. Sia X una varietà topologica compatta, connessa, orientata, di dimensione n. Si
pone
[X] = “classe fondamentale” = “generatore di Hn (X) che definisce l’orientazione”
(per il Teorema 6, esiste un (unico) elemento in Hn (X) ∼
= Z che definisce l’orientazione; cfr. oss. 4.6).
Inciso 8. Considerando coefficienti in Z2 , per il Teorema dei Coefficienti Universali (cfr. §3, 67) si ha
Hn (X, X r {x}; Z2 ) ∼
= Z2
e , diventa una nozione automaticamente
e la nozione di orientazione, intesa come esistenza di una sezione di X
e = X, si osservi che X
e om.loc. = X ∪• X dove le
soddisfatta da ogni varietà (semplicemente perché si ha X
due copie corrispondono alle sezioni 0 ed 1). Nel senso di cui sopra possiamo affermare che ogni varietà è
Z2 -orientabile. Pur lavorando con Z2 i risultati enunciati sopra continuano a valere, in particolare continua
a valere il Teorema 6 (si osservi che nella dimostrazione del teorema 6, si distinguono i due casi i) e ii)
e In definitiva,
esclusivamente sulla base dell’esistenza o meno di una sezione di X).
se X è una varietà connessa, compatta, di dimensione n, risulta Hn (X; Z2 ) ∼
= Z2
Sottolineiamo che, essendo ogni varietà Z2 -orientabile, considerando coefficienti in Z2 , ogni varietà compatta
e connessa rientra nel caso i) del Teorema (6).
Si osservi che quanto affermato è in accordo col risultato H2 P2 (R); Z2 ∼
= Z2 (cfr. §3, 66).
84
Dualità di Poincaré.
Sia X una varietà topologica compatta, connessa, orientata, di dimensione n. Scriviamo
la classe fondamentale, o meglio una n-catena che la rappresenti, nella forma
P
(8.1)
[X] =
ni [v0 , ..., vn ]φ
(cfr. notazione §3, 13.1)
i
Si ha che esiste un morfismo ben definito (cfr. Oss./Def. §4, 9), detto morfismo di dualità:
(8.2)
D : H k (X; Z)
ϕ
−−−→
Hn−k (X; Z)
7→
[X] ⌢ ϕ
:=
P
ni ϕ([v0 , ..., vk ]φ ) · [vk , ..., vn ]φ
i
i
Teorema 9 (Dualità di Poincaré). Sia X come sopra. Il morfismo D è un isomorfismo.
Questo risultato non lo dimostriamo. In estrema sintesi, l’idea di base della dimostrazione consiste nel procedere
per induzione sugli aperti di un ricoprimento in carte locali. La formalizzazione di questa idea richiede un po’
di lavoro:
k
i) si introduce una nuova teoria coomologica, la cosiddetta coomologia a supporto compatto Hcomp
(X; Z);
k
ii) si introduce un morfismo di dualità Dc : Hcomp
(X; Z) → Hn−k (X; Z);
iii) si dimostra che Dc è un isomorfismo per ogni varietà orientata, di dimensione n (non si assume né
compattezza né connessione). Come accennavamo, questo step si prova sostanzialmente per induzione
(richiede una notevole quantità di lavoro e l’introduzione di risultati e tecniche non elementari);
k
(X; Z) = H k (X; Z) e D = Dc (naturalmente,
iv) si osserva che se X è compatta e connessa allora Hcomp
l’ipotesi che X sia connessa è sostanzialmente irrilevante: si può considerare la classe fondamentale di
ogni componente connessa, quindi introdurre D anche in presenza di più d’una componente connessa,
eccetera).
Nota 10. Le varietà topologiche compatte nelle quali capita di imbattersi sono CW-complessi. In effetti si
congettura che ogni varietà topologica compatta sia un CW-complesso (che, per ragioni di compattezza, sarà
necessariamente finito). In un CW-complesso finito, l’omologia cellulare è finitamente generata (è generata dalle
n-celle, che in un CW-complesso finito sono in numero finito per definizione). Per l’equivalenza dell’omologia
cellulare con quella singolare (Teorema §3, 52), i CW-complessi finiti hanno gruppi di omologia finitamente
generati.
Lemma 11. Se X è una varietà topologica compatta, allora
Hk (X) è finitamente generato, per ogni k .
Questo lemma non lo dimostriamo. Sottolineiamo che l’argomento nella nota (10) dimostra il lemma in un
caso che, almeno congetturalmente, esaurisce tutti i casi possibili (ed include tutte le varietà conosciute)!
Osservazione 11.1. Per il lemma (11), è definita la caratteristica di Eulero Poincaré delle varietà compatte:
P
χ(X) :=
(−1)i βi (X)
(ricordiamo che βi (X) := rangoHi (X), cfr. §3, 5.2).
Come conseguenza immediata della dualità di Poincaré si deduce il seguente risultato.
Corollario 12. Se X è una varietà topologica compatta, connessa, orientata di dimensione dispari, allora la
sua caratteristica di Eulero Poincaré è nulla:
dim X =
2k + 1
=⇒
χ(X) = 0 .
(i.e. è dispari)
P
Dimostrazione. Nell’espressione χ(X) =
(−1)i βi (X), i termini (−1)i βi (X) e (−1)n−1 βn−i (X) si cancellano, per ogni i. Infatti, per la dualità di Poincaré si ha
βi (X) = βn−i (X) , ∀ i .
85
La dualità di Poincaré permette un’utile interpretazione del prodotto cup. Si consideri il
diagramma che segue:
f[X]
`
B : H k (X; Z) × H n−k (X; Z) −−−→ H n(X; Z)
(ϕ
(13)
,
7→
ψ)
ϕ ` ψ
−−−→
Z
7→
(ϕ ` ψ) ([X])
l
σ
:= [X] ⌢ ϕ
∈ Hn−k (X; Z)
( = ψ([X]⌢ϕ)
= ψ(σ) )
(♣)
Nella parte bassa abbiamo indicato ciò che si ottiene sostituendo il fattore H k (X; Z) col suo duale di Poincaré
Hn−k (X; Z), ovvero sostituendo ϕ col suo duale di Poincaré σ := [X] ⌢ ϕ. L’uguaglianza (♣) segue da
una formula generale che vale a livello di catene e cocatene (che noi applichiamo per ω = [X]):
(ϕ ` ψ) (ω)
=
ψ(ω ⌢ ϕ) ,
∀ ω ∈ Ck+h (X), ϕ ∈ C k (X), ψ ∈ C h (X)
(quest’ultima segue dalle definizioni §4, 4 e 9.1, la si verifichi per esercizio). Quanto osservato ci dice che la
composizione alla prima riga del diagramma (13), cioè la forma bilineare f[X] ◦ ` , non è altro che la forma
B ′ : Hn−k (X; Z) × H
(13.1)
(σ
,
n−k
(X; Z)
−−−−→
Z
7→
ψ(σ)
ψ)
La forma B ′ soddisfa la proprietà che segue (qui poniamo h := n − k):
(13.2)
∀ ξ ∈ Hom Hh (X; Z), Z , ∃ ψ ξ(-) = B ′ (-, ψ) ; ψ è di torsione
⇐⇒ B ′ (-, ψ) = 0 .
(i.e. ∃ m ≥ 1 | mψ = 0)
Infatti, la prima parte è la suriettività del morfismo q che appare nella successione esatta §4, 2, per G = Z
(teorema dei coefficienti universali in coomologia). Quanto alla seconda parte, la successione esatta
§4, 2, ci
dice anche che B ′ (-, ψ) = 0 se e solo se ψ appartiene all’immagine del gruppo Ext Hh−1 (X), Z , gruppo
che, per il lemma 11, coincide col suo sottogruppo degli elementi di torsione. Ne segue che anche gli elementi
ψ provenienti da tale Ext debbano essere elementi di torsione.
Come già osservato, la forma bilineare B = f[X] ◦ ` (diagramma 13, prima riga), non è altro che la forma
B ′ . Quindi soddisfa anch’essa la proprietà (13.2). Alla luce dell’uguaglianza ϕ ` ψ = ±ψ ` ϕ (§4, 8), dove il
segno dipende solo da k ed n− k, le proprietà (13.2) scritte per gli indici k e k ′ = n− k danno la proposizione
che segue.
Proposizione 14. Sia X una varietà topologica compatta, connessa, orientata, di dimensione n. La forma bilineare
(14.1)
B :
f[X]
`
H k (X; Z) × H n−k (X; Z) −−−→ H n(X; Z) −−−→
(ϕ
,
7→
ψ)
ϕ ` ψ
7→
è unimodulare.
Z
ϕ ` ψ ([X])
Ciò significa che soddisfa la “(13.2)” sia nel primo che nel secondo argomento: ogni funzione lineare nel primo
argomento (a valori in Z) è del tipo B(-, ψ), ogni funzione lineare nel secondo argomento è del tipo B(ϕ, -)
e, inoltre, B(-, ψ) (ovvero B(ϕ, -)) è identicamente nulla se e solo se ψ (ovvero ϕ) è di torsione.
Def. 15. Il prodotto “duale di Poincaré” della forma (14.1), ovvero la forma bilineare
(15.1)
Hn−k (X; Z) × Hk (X; Z)
(σ
,
τ )
deg
•
−−−
→
H0 (X; Z)
−−−→
Z
7→
σ• τ
7→
deg (σ • τ )
definita semplicemente traducendo la (14.1) via D, ovvero ponendo
(15.2)
σ • τ := D D −1 (σ) ` D −1 (τ ) ,
viene chiamato prodotto di intersezione.
86
Il risultato interessante è che il prodotto di intersezione appena definito ha un’interpretazione geometrica
assolutamente notevole: coincide con una nozione di intersezione molto più “geometrica e familiare”, la nozione
di intersezione di cicli introdotta nell’inciso che segue.
Premessa. Sia X una varietà topologica compatta, connessa, orientata, di dimensione n. Sia V una sottovarietà di X , anch’essa compatta e orientata, di dimensione k. La classe fondamentale di V può essere
vista come k-ciclo in X tramite il morfismo indotto in omologia dall’inclusione (cfr. §3, 9). Se W è un’altra
sottovarietà compatta orientata, di dimensione n − k, è ragionevole attendersi che l’intersezione V ∩P
W sia
costituita da un insieme finito di punti {p1 , ..., pm } e possa essere considerata come 0-ciclo V.W =
±pi ,
essendo i segni definiti in modo opportuno (cfr. sotto). Questa premessa vuole suggerire due cose:
• l’idea che le sottovarietà compatte orientate (ed anche le loro combinazioni lineari formali) possano essere
pensate come cicli;
• l’idea che l’intersezione insiemistica possa essere vista in termini omologici.
Ai fini della strada che vogliamo percorrere si devono considerare varietà differenziabili.
Inciso 15.3. Sia X una varietà differenziabile orientata, di dimensione n, A e B sottovarietà29 diffeomorfe
ad Rk ed Rn−k (quindi anch’esse orientate) che si incontrano trasversalmente in un punto p (i.e. la somma
di sottospazi tangenti s : Tp (A) + Tp (B) −→ Tp (X) è un isomorfismo), si definisce l’intersezione locale di
A e B in p ponendo (A.B)p = ±p (inteso come 0-ciclo), dove il segno “±” dipende dalle orientazioni: è il
segno del determinante di s, scritta relativamente a basi positivamente orientate di Tp (A), Tp (B) e Tp (X).
A questo punto introduciamo una nozione: un k-simplesso liscio σ : ∆k → X è la restrizione di una
funzione C ∞ definita in un intorno aperto di ∆k , una catena liscia è una combinazione lineare di simplessi
lisci. Le nozioni di trasversalità e di intersezione di cui sopra si estendono ai simplessi lisci e, con un minimo
di accorgimenti (lasciamo i dettagli per esercizio), alle catene. Vale il seguente notevole risultato: i) se X è
una varietà differenziabile, ogni classe di omologia ammette rappresentanti lisci; ii) se X è orientata, fissate
due classi di omologia di dimensione k e n − k, è possibile trovare dei rappresentanti lisci σ ∈ Ck (X) e
τ ∈ Cn−k (X) che si incontrano trasversalmente e, per X compatta, risulta σ.τ = σ • τ (a sinistra compare
l’intersezione geometrica appena introdotta, a destra l’intersezione 15.2).
Concludiamo menzionando un altro risultato assolutamente notevole. Sempre nel caso in cui X sia una
varietà differenziabile, vale il Teorema di de Rham che consente di identificare la coomologia di de Rham con
la coomologia a coefficienti reali, modulo questa identificazione il prodotto cup corrisponde al prodotto wedge
di forme differenziali e, in omologia, al prodotto di intersezione, inoltre, il passaggio dalla coomologia di de
Rham all’omologia è dato dall’integrazione delle k-forme chiuse sui k-cicli. ...per i dettagli rimandiamo al
corso di geometria differenziale!
◦
∼
◦
Generalizzazione 16. La dualità di Poincaré continua a valere quando si considerano omologia e coomologia
a coefficienti in un gruppo abeliano G arbitrario: se X è una varietà orientata di dimensione n, allora i
morfismi
k
Dc : Hcomp
(X; G) → Hn−k (X; G)
e,
per X compatta, D : H k (X; G) → Hn−k (X; G)
sono isomorfismi. Inoltre, per G = Z2 , l’ipotesi che X sia orientabile può essere rimossa (ciò che serve è la
Z2 -orientabilità, che è un’ipotesi vuota, cfr. inciso 8): per G = Z2 , Dc è un isomorfismo e, se X è compatta,
lo è anche D.
29
Qui, non chiediamo che siano chiuse in X. Naturalmente saranno localmente chiuse.
87
§ A1.
Gruppi liberi e prodotto libero di gruppi.
j
j
Ogni gruppo contenente un dato insieme S conterrà espressioni del tipo σ1 1 · ... · σk k ,
σi ∈ S , ji ∈ Z . Per definizione, il gruppo libero su S è il gruppo di tali espressioni modulo
esclusivamente le relazioni “necessarie”, cioè del tipo σ i·σ j = σ i+j e σ 0 = 1. È opportuno
essere più precisi:
Sia S un insieme. Consideriamo espressioni formali, che chiameremo S-parole, del tipo
(1)
j
j
σ = σ1 1 · ... · σk k ,
σi ∈ S ,
ji ∈ Z
(non si richiede che i vari σi , detti lettere, siano distinti, si considera anche la parola vuota).
(1.1) l’intero k ∈ N si chiama lunghezza di σ (l’espressione vuota ha lunghezza zero);
(1.2) il prodotto di S-parole si definisce nella maniera ovvia, cioè ponendo
σ1j1 · ... · σkjk · τ1ι1 · ... · τhιh
:= σ1j1 · ... · σkjk · τ1ι1 · ... · τhιh
(si osservi che la parola vuota è un elemento neutro per il prodotto);
(1.3) una S-parola σ1j1 · ... · σkjk si dice minimale se σi 6= σi+1 , i = 1, ..., k − 1 (lettere consecutive sono
distinte) e ji 6= 0, ∀ i, altrimenti si dice riducibile;
(1.4) una riduzione elementare di una S-parola è la S-parola che si ottiene sostituendo due termini consecutivi
σ i · σ j (stessa lettera) con σ i+j , ovvero cancellando lettere con esponente zero; una riduzione è una
sequenza di riduzioni elementari;
(1.5) sull’insieme delle S-parole si considera la relazione d’equivalenza generata dalle riduzioni elementari:
due S-parole σ e τ sono equivalenti se esiste una sequenza finita di S-parole
σ = ω0 ,
ω1 ,
... ,
ωm−1 ,
ωm = τ
dove le S-parole ωi e ωi+1 sono collegate da un passo elementare, i.e. una delle due si ottiene dall’altra
tramite una riduzione elementare, per i = 1, ..., m − 1.
A partire dalle S-parole, ci sono due modi equivalenti di definire il gruppo libero su un insieme S (cfr. def. 2
e oss. 4).
Def. 2. Il gruppo libero su S è il gruppo delle classi d’equivalenza di S-parole col prodotto (1.2).
È chiaro che effettivamente si sia definito un gruppo:
(2.1) il prodotto di S-parole (1.2) è associativo nonché compatibile con la relazione d’equivalenza (1.5);
(2.2) l’elemento neutro è la S-parola vuota e l’inverso della S-parola σ1j1 ·...·σkjk è la S-parola σk−jk ·...·σ1−j1 .
Il lemma che segue ci permette di comprendere chi sono gli elementi di tale gruppo (cosa non affatto chiara a
priori) nonché ha come corollario il fatto che il gruppo delle classi di equivalenza di S-parole appena introdotto
di fatto coincide con il gruppo libero su S cosı̀ come viene introdotto nell’osservazione (4).
Lemma 3. Ogni classe di equivalenza di S-parole ha un unico rappresentante minimale.
Dimostrazione. Data una S-parola σ consideriamo la “riduzione da destra”, che denoteremo con rdx (σ),
definita dall’algoritmo seguente: se σ è minimale non si fa nulla e l’algoritmo termina, se non lo è si effettua
la riduzione elementare più a destra, quindi si itera questa procedura (l’algoritmo termina perché la lunghezza
della parola diminuisce ad ogni passo). Due S-parole equivalenti σ e τ sono, per definizione, collegate da una
sequenza come nella (1.5), assumendo che siano minimali si deve avere una catena di uguaglianze di S-parole
σ = rdx (σ) = rdx (ω0 ) = rdx (ω1 ) = ... = rdx (ωm−1 ) = rdx (ωm ) = rdx (τ ) = τ
Le uguaglianze σ = rdx(σ) e τ = rdx(τ ) valgono perché σ e τ sono già minimali, le altre uguaglianze
seguono dal fatto che le riduzioni da destra di due parole collegate da un passo elementare coincidono (questo
si verifica facilmente considerando i vari casi possibili, lo lasciamo come facile, ma non banale, esercizio). Osservazione 4. Si può considerare il gruppo MS delle S-parole minimali, essendo il prodotto definito
dalla ricetta che segue: si scrive l’espressione a destra della (1.2) e la si riduce fino a renderla minimale (se
già minimale, la riduzione consisterà nel non fare nulla). Quanto appena introdotto è non ambiguo ed è un
88
gruppo. Infatti:
(4.1) partendo da un prodotto di due S-parole minimali, l’eventuale riduzione di cui sopra è univocamente
determinata (essendo le due S-parole minimali, potrà esserci qualcosa da ridurre solo a partire dal loro
“punto di contatto”);
(4.2) il prodotto descritto è associativo (questo non è totalmente ovvio, ma si dimostra facilmente);
(4.3) elemento neutro e inversi (cosı̀ come nella 2.2) hanno senso nel mondo delle parole minimali.
Come già accennato, quanto appena visto dà un modo equivalente di definire il gruppo libero su S : il lemma (3)
di fatto ci dice che il morfismo naturale che ad una S-parola minimale associa la sua classe d’equivalenza, è
un isomorfismo da MS al gruppo libero su S cosı̀ come definito nella def. (2).
Il gruppo libero su S , che denotiamo con Free(S), è caratterizzato dalla seguente proprietà
universale:
(5)
∀
G
ed f : S −→ G , ∃ !
fe : Free(S) −→ G
.
(gruppo)
(funzione)
(morfismo di gruppi che estende f )
Dimostrazione. L’unicità di un tale fe è immediata: si deve avere fe (σ1j1 · ... · σkjk ) = g1j1 · ... · gkjk , essendo
gi := f (σi ). Quanto all’esistenza, si definisce fe su tutte le S-parole usando la formula indicata, quindi si
verifica che la definizione è ben posta (basta ragionare con parole che differiscono per una riduzione elementare).
La funzione ottenuta è chiaramente moltiplicativa. In alternativa, per chi preferisce la definizione di gruppo
libero data nell’osservazione (4), si definisce fe sulle S-parole minimali (sempre usando la formula indicata),
quindi si verifica che è moltiplicativa.
Esempio. Se S = {σ} è costituito da un solo elemento, allora c’è un isomorfismo naturale
fσ : Free(S) −−−→ Z ,
σ n 7→ n
(è il morfismo che estende σ 7→ 1 ∈ Z, cfr. (5)).
Se S è costituito da due o più elementi, allora Free(S) non è commutativo.
Def. 7. Il prodotto libero di una famiglia di gruppi { Gσ }σ∈S parametrizzata da un
`
insieme S , che denoteremo con σ∈S Gσ , è il gruppo delle classi d’equivalenza di espressioni
formali gσ1 · ... · gσ :
k
a
Gσ
:=
g = gσ1 · ... · gσ gσ ∈ Gσi , σi ∈ S i
k
∼
σ∈S
dove il prodotto è definito nel modo naturale, cioè ponendo
:= gσ1 · ... · gσ · hτ1 · ... · hτ
gσ1 · ... · gσ · hτ1 · ... · hτ
k
k
k
k
e l’equivalenza è quella generata dalle riduzioni elementari che seguono:
•
“sostituire gσ · hσ col loro prodotto in Gσ ”;
•
“omettere gli eventuali elementi neutri 1σ ∈ Gσ ”.
Non si richiede che i vari σi siano distinti, si considera anche la parola vuota.
A parte l’assenza degli esponenti (che qui è non necessaria perché i vari Gσ sono gruppi), valgono considerazioni
analoghe a quelle viste nel caso del gruppo libero su un insieme:
(7.1) la definizione è ben posta (cfr. (2.1) e (2.2));
`
(7.2) ogni elemento g ∈
σ ∈ S Gσ ammette un unico rappresentante minimale (cfr. lemma (3)).
Avvertenza. Il prodotto libero di gruppi, in generale, non è un gruppo libero (il prodotto libero di gruppi
liberi lo è).
Il prodotto libero di due gruppi H e G lo denoteremo con H⋆ G . Occasionalmente useremo anche le
notazioni
G1 ⋆ ... ⋆Gk (prodotto libero dei gruppi indicati) e G⋆k (prodotto libero di k copie di G)
89
Esempio 8. Sia S un insieme e, per ogni elemento σ ∈ S , sia σZ una copia di Z. C’è un isomorfismo
naturale
`
σZ
Free(S) −−−→
σ∈S
`
(definito dalla proprietà universale (4) applicata ad f : S →
σZ , σ 7→ 1 ∈ σZ). Ciò rende possibile
vedere la definizione di gruppo libero su un insieme come caso particolare della definizione di prodotto libero
di gruppi: `
si definisce il prodotto libero di gruppi quindi si introduce il gruppo libero su un insieme come il
prodotto
σZ.
`
Oss. 9. Per ogni σ c’è un’inclusione canonica di gruppi iσ : Gσ ֒→
Gσ , g 7→ g (all’elemento g ∈ Gσ
si associa l’espressione formale costituita dal solo elemento g).
Il prodotto libero di gruppi è caratterizzato dalla seguente proprietà universale:
(10)
per ogni gruppo H ed ogni collezione di morfismi
ϕσ : Gσ −→ H σ ∈ S
esiste unico Φ che fa commutare il diagramma qui a lato
Gσ
iσ y
`
ց ϕσ
Φ
Gσ − − → H
Gruppi abeliani liberi
Si può ripetere quanto visto nella sezione precedente considerando espressioni formali modulo permutazioni,
cosı̀ facendo si costruisce il gruppo abeliano libero su un insieme. Come spesso accade per i gruppi abeliani,
si preferisce una notazione additiva:
Def. 11. Il gruppo abeliano libero su un insieme S è il gruppo delle somme formali
σ
=
k
P
i=1
ni σi ,
σi ∈ S ,
ni ∈ Z
(modulo permutazioni) con l’operazione di gruppo definita nella maniera naturale.
Naturalmente, i termini dove il coefficiente ni è nullo si considerano come se fossero assenti. L’elemento neutro
del gruppo è la somma vuota, i.e. quella dove k = 0.
Inciso 12. Tornando per un momento a quanto visto nella sezione precedente, nel gruppo libero su S (cfr. 2)
modulo commutatori, ovvero modulo l’equivalenza generata dalle permutazioni, ogni elemento ammette un
rappresentante del tipo
con i σi distinti e ji 6= 0 , ∀ i
σ = σ1j1 · ... · σkjk ,
unico a meno di permutazioni. Deve essere ben chiaro che il gruppo quoziente appena introdotto di fatto
differisce da quello della definizione (11) esclusivamente per un cambio di notazione: il passaggio da una
notazione additiva ad una moltiplicativa.
Osservazione 13. Un modo equivalente di introdurre il gruppo abeliano libero su S consiste nel definirlo
come il gruppo delle funzioni
f : S −→ Z tali che l’insieme { σ ∈ S | f (σ) 6= 0 } è un insieme finito
dove l’operazione di gruppo è la somma di funzioni.
Il gruppo abeliano libero su S , che qui denotiamo con S Z, è caratterizzato dal fatto di essere il gruppo
abeliano, unico a meno di isomorfismi di gruppi, soddisfacente la seguente proprietà universale:
(14)
∀
G
,
(gruppo abeliano)
f : S −→ G
(funzione)
∃!
fe : S Z −→ G
(morfismo di gruppi che estende f )
90
Def. 15. Un gruppo abeliano libero è un gruppo abeliano isomorfo ad un qualche S Z.
(15.1) In un gruppo abeliano libero non esistono elementi di torsione (elementi σ 6= 0 con nσ = 0 per un
qualche n 6= 0), naturalmente il viceversa non è vero: Q non è libero sebbene non abbia torsione.
(15.2) Dato un gruppo abeliano G, un suo sottoinsieme S si dice indipendente se il morfismo fe : S Z −→ G
dato dalla proprietà universale è iniettivo, equivalentemente, se in G non esistono relazioni non banali
Pk
tra gli elementi di S (i.e. uguaglianze del tipo
i=1 ni σi = 0 con i σi ∈ S e gli ni ∈ Z non tutti
nulli).
(15.3) Ogni sottogruppo di un gruppo abeliano libero è anch’esso un gruppo abeliano libero.
(15.4) Dato un gruppo abeliano G, se S è un insieme massimale indipendente, allora
cardinalità(S)
≥
cardinalità(S ′ )
per ogni S ′ indipendente
Le proprietà (15.3) e (15.4) non sono cosı̀ ovvie come si potrebbe pensare. Per la dimostrazione e approfondimenti rimandiamo lo studente ad un corso di algebra.
Esercizio. Si dimostri la (15.3) per il gruppo Zn e si dimostri la (15.4) nell’ipotesi che S sia un insieme
finito.
L’esistenza di insiemi massimali indipendenti è garantita dal lemma di Zorn (da applicarsi al sottoinsieme,
dell’insieme delle parti di G, i cui elementi sono gli insiemi indipendenti), grazie alla (15.4) due insiemi
massimali indipendenti hanno la stessa cardinalità e, di conseguenza, la definizione che segue risulta ben
posta.
Def. 16. Sia G un gruppo abeliano. Si definisce
rango(G)
:=
“cardinalità di un insieme massimale indipendente”
91
§ A2.
Algebra Omologica.
I risultati che trattiamo in questo paragrafo, e più in generale che rientrano nell’ambito dell’algebra omologica,
valgono in un contesto astratto molto generale, quello delle categorie abeliane. Questi risultati ci interessano
ai fini dello studio dell’omologia singolare, ovvero come macchinario algebrico per lo studio dell’omologia
di complessi nella categoria dei gruppi abeliani. Da un lato è importante che passi l’idea che si tratta di
risultati generali, d’altro canto i complessi che si incontrano in omologia e coomologia (anche nello studio di
varietà di differenziabili come il complesso di de Rham, o nello studio di varietà analitiche o algebriche) sono
generalmente complessi nella categoria dei gruppi abeliani o in quella degli spazi vettoriali su un campo (di
solito R o C). Una trattazione che tenga conto di ciò consente di dare definizioni, teoremi e dimostrazioni
in un linguaggio più comprensibile. Per le ragioni esposte almeno in questa prima sezione usiamo un termine
proprio della teoria delle categorie, il termine “oggetto”, avvertendo chi legge che tale termine può essere
letto intendendo indifferentemente “gruppo abeliano” o “spazio vettoriale”; conseguentemente, col termine
“morfismo” si intende “morfismo di gruppi abeliani” ovvero, nel caso si pensi agli oggetti come spazi vettoriali,
si intende “applicazione lineare”. (Sottolineiamo che per la lettura di ciò che segue non c’è alcun bisogno di
conoscere cos’è una categoria. Comunque, nell’ultima sezione di questo paragrafo diamo una breve introduzione
alla teoria delle categorie).
Dato un morfismo f : A −→ B di oggetti (= gruppi abeliani/spazi vettoriali) A e B
denotiamo nucleo, immagine e conucleo di f rispettivamente con
kerf
(nucleo di f )
,
Imf
,
(immagine di f )
cokerf
(conucleo di f )
(essendo il conucleo di un morfismo f : A −→ B definito come il quoziente B/Imf ).
Def. 1. Un complesso di catene C• è una sequenza di morfismi detti bordi
(1.1)
∂i+1
∂
i
. . . −−→ Ci+1 −−−→ Ci −−−
→ Ci−1 −−→ . . .
soddisfacente ∂i ◦ ∂i+1 = 0, per ogni i.
Naturalmente, l’intero i può variare in Z come pure in un suo intervallo finito o infinito, ad esempio N.
Convenzione 1.2. All’occorrenza, qualora tale intero vari in un intervallo proprio di Z, si assumono uguali
a zero gli oggetti e i morfismi non definiti.
Def. 2. Si definisce l’omologia in grado n di un complesso di catene C• (def. 1) ponendo
(2.1)
Hn (C• )
ker ∂n
Im ∂n+1
=
Gli elementi in Im ∂n+1 vengono chiamati n-bordi, quelli in ker ∂n vengono chiamati n-cicli.
Nota 2.2.
La condizione ∂n ◦ ∂n+1 = 0 (def. 1) equivale alla condizione Im ∂n+1 ⊆ ker ∂n .
Inciso 3. Nel complesso (1.1) gli indici decrescono, per questa ragione parliamo di complesso discendente di
catene. Se gli indici crescono parliamo di complesso ascendente di cocatene e gli indici vengono posti in alto:
di−1
d
i
C i+1 −−→ . . .
. . . −−→ C i−1 −−−→ C i −−→
ker dn
In questo caso si definisce la coomologia del complesso C • ponendo H n (C • ) = Im dn−1 . Il prefisso “co” sta
a sottolineare che si tratta di un complesso ascendente, si userà tale prefisso anche nell’indicare gli elementi di
kerdn (cocicli) e quelli di Imdn−1 (cobordi). Naturalmente, tutti i risultati di questo paragrafo valgono anche
per i complessi ascendenti.
Def. 4. Una successione di morfismi si dice esatta se l’immagine di ogni morfismo coincide
col nucleo del successivo.
92
Ad esempio, la successione (1.1) è esatta se risulta ker∂i = Im∂i+1 , ∀ i (i.e. C• ha omologia nulla). In
particolare:
f
•
•
•
•
g
dire che B −→ C −→ D è esatta equivale a dire che Imf = kerg;
dire che C −→ D −→ 0 è esatta equivale a dire che il morfismo C −→ D è suriettivo;
dire che 0 −→ B −→ C è esatta equivale a dire che il morfismo B −→ C è iniettivo;
dire che la successione 0 −→ C −→ C ′ −→ 0 è esatta equivale a dire che il morfismo C −→ C ′ è un
isomorfismo;
Si sarà notato che, parlando di esattezza, la convenzione (1.2) non si applica.
Def. 4.1. Una successione esatta del tipo
f
g
0 −−−→ B −−−→ C −−−→ D −−−→ 0
viene chiamata successione esatta corta.
Esercizio 4.2. Si verifichi che per la successione esatta corta della definizione (4.1) ci sono delle identificazioni
naturali
B = ker g e D = coker f
(in particolare, il primo dei due morfismi al centro è iniettivo ed il secondo è suriettivo).
Notazione 5. Si può considerare C• come oggetto graduato ⊕ Cn dotato di un endomorfismo (=morfismo
in se stesso) ∂ : C• → C• di grado −1 di oggetti graduati (in generale, un oggetto graduato è una somma
diretta di oggetti indicizzati da un intero e un morfismo di oggetti graduati si dice di grado d se gli oggetti
di grado k vengono mandati in quelli di grado k + d). Si osservi che la condizione “ ∂i ◦ ∂i+1 = 0, ∀ i” si
riassume nella formula ∂ ◦ ∂ = 0.
Def. 6. Un morfismo di complessi f : C• −→ D• è un morfismo
f : ⊕ Cn −→ ⊕ Dn
di grado zero30 che commuta con i bordi,
i.e. soddisfa la relazione f ◦ ∂ = δ ◦ f (dove ∂ e δ denotano rispettivamente il bordo in C•
ed il bordo in D• ). Detto in termini più estesi, è una collezione di morfismi {fn } come nel
diagramma
(6.1)
∂n+1
∂
∂n−1
δn+1
δ
δn−1
n
. . . −−−→ Cn+1 −−−→ Cn −−−
→ Cn−1 −−−→ Cn−2 −−−→
f
f
f
f
yn
y n−2
y n+1
y n−1
n
. . . −−−→ Dn+1 −−−→ Dn −−−
→ Dn−1 −−−→ Dn−2 −−−→
...
...
soddisfacente la proprietà che ogni quadrato commuti (i.e. δn ◦ fn = fn−1 ◦ ∂n , ∀ n).
Oss. 7. Un diagramma commutativo
∂
A −−−→
fy
δ
A′
′
yf
induce morfismi f |ker∂ : ker ∂ −→ ker δ e f ′ |Im∂ : Im ∂ −→ Im δ ,
B −−−→ B ′
i.e. risulta f (ker∂) ⊆ kerδ e f ′ (Im∂) ⊆ Imδ.
Come corollario di quanto appena osservato, a morfismi di complessi corrispondono morfismi
in omologia:
un morfismo di complessi f : C• −→ D•
(8.1)
induce morfismi in omologia f⋆ : Hn (C• ) −→ Hn (D• )
definiti associando ad una classe d’omologia la classe dell’immagine di un suo rappresentante.
30
Salvo diversamente specificato.
93
Dimostrazione. Che gli f⋆ siano ben definiti segue dall’osservazione (7): per la (i), se un elemento in α ∈ Cn
rappresenta una classe d’omologia, i.e. ha bordo nullo, anche la sua immagine f (α) ha bordo nullo, ovvero
rappresenta una classe in Hn (D• ); per la (ii), se α ed α′ rappresentano la stessa classe, ovvero differiscono
per un bordo, anche le loro immagini differiscono per un bordo. Che siano morfismi segue dal fatto che, essendo
f un morfismo, già a livello di rappresentanti viene rispettata l’operazione di gruppo.
Una proprietà evidente (di fatto tautologica), ma fondamentale, dei morfismi indotti in
omologia è la funtorialità:
(8.2)
(g ◦ f )⋆ = g⋆ ◦ f⋆ ,
IdC• ⋆ = IdH• (C• )
dove f : C• −→ D• e g : D• −→ E• sono morfismi di complessi ed Id sta per “identità”.
Esercizio 8.3. Sia i : C• ֒→ D• un’inclusione di complessi di catene. Provare che se ogni classe in Hn (D• )
ammette un rappresentante α ∈ Cn , allora il morfismo indotto i⋆ : Hn (C• ) −→ Hn (D• ) è suriettivo.
Non vale un risultato analogo per l’iniettività: nel caso dell’esempio a lato, pur
essendo nelle ipotesi dell’esercizio (inclusione di complessi di catene dove ogni
classe di omologia del codominio ammette un rappresentante nel dominio), il
morfismo indotto in omologia non è iniettivo.
0 −→
0
↓
0 −→ Z
−→
Z −→ 0
↓ Id
Id
−−→ Z −→ 0
Avendo a disposizione la nozione di morfismo di complessi (cfr. def. 6), possiamo parlare di successioni di
complessi. Il lemma che segue mette in relazione i gruppi di omologia dei complessi di una successione esatta
corta di complessi.
Lemma 9. Una successione esatta corta di complessi di catene
(♣)
0
−−−→
B•
β
−−−→
C•
γ
−−−→
−−−→
D•
0
induce una successione esatta lunga in omologia
β⋆
γ⋆
δ
... −−−→ Hn (B• ) −−−−→ Hn (C• ) −−−−→ Hn (D• ) −−−→ Hn−1 (B• ) −−−→
...
Dove δ è il morfismo di incollamento definito sotto (9.1). In termini estesi, la successione (♣) è un enorme
diagramma commutativo
..
..
..
.
.
.
y
y
y
β
γ
Cn+1
y∂
−−−→
−−→ Bn−1 −−−→ Cn−1
y
y
..
..
.
.
dove ogni riga è esatta e dove le colonne sono complessi.
−−−→
0
0
0
−−→ Bn+1
y∂
−−→
Bn
y∂
−−−→
β
−−−→
β
Cn
y∂
γ
−−−→
γ
Dn+1
y∂
−−→
0
−−→
0
Dn−1
y
..
.
−−→
0
Dn
y∂
Nota 9.1. Il morfismo δ, detto morfismo di incollamento, è definito come segue: data una classe in Hn (D• )
si sceglie un rappresentante d ∈ Dn (con ∂ d = 0), questo si solleva a c ∈ Cn , vi si associa ∂ c ∈ Cn−1 ,
quest’ultimo (che soddisfa γ ∂ c = ∂ γ c = ∂ d = 0) si solleva a b ∈ Bn−1 , di tale b se ne prende la classe
d’omologia. L’ultimo sollevamento, essendo β iniettiva, è unico; quanto alla scelta del rappresentante d e del
sollevamento d
c, una scelta differente conduce ad un risultato finale b′ con b − b′ ∈ ∂ Bn , cioè con b e
′
b che definiscono la stessa classe di omologia (per esercizio).
94
La dimostrazione del lemma (9) si riduce ad una serie di verifiche, l’esattezza nei vari punti della successione.
Ad esempio, l’esattezza in Hn (C• ) , che è l’uguaglianza Imβ⋆ = kerγ⋆ in grado n, per quanto concerne
l’inclusione “⊆” segue dall’uguaglianza γ◦β = 0 (e dalla funtorialità), mentre per quanto concerne l’inclusione
“⊇” si deve lavorare un po’ di più:
[c] ∈ ker γ⋆ =⇒ ∃ d′ ∈ Dn+1 | ∂d′ = γ(c) =⇒ ∃ c′ ∈ Cn+1 | c − ∂c′ ∈ kerγ
(1)
=⇒ ∃ b ∈ Bn | β(b) = c − ∂c′ e ∂b = 0 =⇒ [c] ∈ Imβ⋆
(2)
(in (1) utilizziamo la suriettività di γ, in (2) utilizziamo l’esattezza in Cn e l’iniettività di β). Lasciamo le
verifiche rimanenti (esattezza in Hn (B• ) ed esattezza in Hn (D• )) per esercizio.
Nota 9.2. Data un’inclusione di complessi di catene B• ֒→ C• è possibile considerare il complesso quoziente
C• /B• e scrivere la successione esatta corta di complessi di catene
−−→
0
B•
ι
−−−→
C•
π
−−−→
−−→
C• /B•
0
(ci si convinca del fatto che la proiezione naturale π sia effettivamente un morfismo di complessi di catene).
Conseguentemente si può scrivere la successione esatta lunga in omologia data dal lemma (9):
π
ι
δ
⋆
Hn (C• ) −−−⋆−→ Hn (C• /B• ) −−−→ Hn−1 (B• ) −−→
... −−→ Hn (B• ) −−−→
...
Def. 10. Due morfismi di complessi f , g : C• −→ D• si dicono omotopi se esiste
J : C• −→ D• di grado 1 soddisfacente la relazione δ ◦ J + J ◦ ∂ = f − g . In formule:
(10.1) f ∼omotopo g
⇐⇒
∃ J ∈ Hom 1 (C• , D• ) δ ◦ J + J ◦ ∂ = f − g
In termini più estesi, un’omotopia di complessi è una collezione di morfismi jn come nel diagramma
...
...
−−−−→
−−−−→
Cn+1
f yyg
Dn+1
∂n+1
−−−−→
ւjn
−−−−→
δn+1
soddisfacenti δn+1 ◦ jn + jn−1 ◦ ∂n
Cn
f yyg
Dn
∂
−−−n−→
ւjn−1
−−−−→
δn
Cn−1
f yyg
Dn−1
∂n−1
−−−−→
ւjn−2
−−−−→
δn−1
Cn−2
f yyg
Dn−2
−−−−→
...
−−−−→
...
= fn − gn , ∀ n .
L’omotopia di morfismi di complessi di catene è una relazione d’equivalenza. Inoltre, è compatibile con la
composizione, questa seconda affermazione si traduce nella seguente implicazione
(10.2)
C•
f
−→
−→
g
D•
h
−→
−→
t
E• ,
f ∼omotopo g,
h ∼omotopo t
=⇒
h ◦ f ∼omotopo t ◦ g
La dimostrazione delle due affermazioni è un conto, la lasciamo per esercizio. Si osservi che come corollario
immediato si deduce che se f : C• → C• è omotopicamente banale, i.e. f ∼omotopo IdC• , allora anche le
potenze di f sono omotope all’identità di C• .
Come già osservato, un morfismo di complessi induce morfismi in omologia (cfr. 8.1). Vale il seguente risultato
fondamentale:
Teorema 11. Morfismi di complessi f , g : C• −→ D• omotopi inducono lo stesso
morfismo in omologia:
f ∼omotopo g
=⇒
f⋆ = g⋆ : Hn (C• ) −→ Hn (D• ) , ∀ n .
Dimostrazione. Se α ∈ Cn rappresenta una classe d’omologia, si ha (f −g)(α) = (δn+1 ◦jn + jn−1 ◦∂n )(α) =
0 ∈ Hn (D• ). Infatti, δn+1 ◦ jn (α) è nullo in omologia in quanto è un bordo, si ha (jn−1 ◦ ∂n )(α) = 0
semplicemente perché ∂n α = 0.
95
Def. 12. Un inverso omotopico di un morfismo di complessi f : C• −→ D• è un morfismo
h : D• −→ C• h ◦ f ∼omotopo IdC• e f ◦ h ∼omotopo IdD•
Se un tale inverso omotopico esiste, f si dice equivalenza omotopica.
Come al solito, “Id ” sta per identità, per cui IdC• = “identità su C• ” e IdD• = “identità su D• ”.
Osservazione 12.1. Come accade in casi del genere, se f ha un “inverso sinistro” h ed un “inverso destro”
h′ , allora si deve avere
h = h ◦ IdD• ∼ h ◦ (f ◦ h′ ) = (h ◦ f ) ◦ h′ ∼ IdC• ◦ h′ = h′ e, di conseguenza,
f ◦ h ∼ f ◦ h′ ∼ IdD• , h′ ◦ f ∼ h ◦ f ∼ IdC•
(usiamo la 10.2). In altri termini, se esistono sia inversi omotopici sinistri che destri, allora coincidono gli uni
con gli altri. Il conto appena fatto ci dice anche che l’inverso omotopico di un morfismo di complessi è unico
a meno di omotopia di complessi: se h ed h′ sono inversi omotopici di f , allora sono omotopi (è già scritto
nel rigo in evidenza).
Corollario 13. Se f : C• −→ D• è un’equivalenza omotopica ed h una sua inversa, allora
i morfismi indotti in omologia f⋆ e h⋆ sono l’uno l’inverso dell’altro,
in particolare sono isomorfismi.
Dimostrazione. Per il Teorema (11) si deve avere
h⋆ ◦ f ⋆
=
(IdC• )⋆ = IdH
n (C• )
e
f ⋆ ◦ h⋆
=
(IdD• )⋆ = IdH
n (D• )
,
∀n
(Thm 11)
(Thm 11)
(che l’identità su un complesso induca l’identità in omologia è ovvio).
Tutto questo suggerisce la definizione che segue:
Def. 14. Un morfismo di complessi f : C• −→ D• si dice equivalenza debole se induce
isomorfismi in omologia.
Vale la pena ribadirlo, il corollario (13) ci dice quanto segue:
l’equivalenza omotopica implica l’equivalenza debole, ovvero induce isomorfismi in omologia
Un caso interessante è quello di un’inclusione di complessi:
Esercizio 14.1. Sia ι : B• ֒→ C• un morfismo iniettivo di complessi liberi di catene (i vari Bn e Cn
sono gruppi abeliani liberi). Provare che le affermazioni che seguono sono equivalenti tra loro:
i) ι è un’equivalenza debole;
i′ ) il complesso quoziente C• /B• (cfr. nota 9.2) è esatto, i.e. ha omologia nulla in ogni grado;
ii) ∀ c ∈ Cn tale che ∂ c ∈ Bn−1 , ∃ b ∈ Bn , c′ ∈ Cn+1 c = b + ∂c′
(è molto più che chiedere che ogni classe in Hn (C• ) ammetta un rappresentante in Bn );
iii) ι è un’equivalenza omotopica.
Suggerimento. L’equivalenza tra i) e i′ ) segue dalla successione esatta lunga in omologia (cfr. 9.2)
...
−−→
δ
Hn+1 (C• /B• ) −−−→
ι
π
⋆
Hn (C• ) −−−⋆−→ Hn (C• /B• ) −−→
Hn (B• ) −−−→
′
...
L’equivalenza tra i) e ii) può essere dimostrata sia direttamente che passando per la i ).
Che la iii) implichi le altre ce lo dice il Teorema (11). La cosa (molto) più difficile è provare il viceversa:
cioè, assumendo la ii), definire un morfismo ̺ : C• → B• in modo che vi siano delle equivalenze omotopiche
ι ◦ ̺ ∼ IdC• e ̺ ◦ ι ∼ IdB• (si inizi col caso, più facile, quello dove il complesso B• è il complesso nullo: in
questo caso si dovrà provare che se C• è esatto allora IdC• ∼ 0).
96
Lemma (dei cinque) 15. In un diagramma come quello indicato, avente righe esatte,
A
−−−→
α
y
A′
B
−−−→
β
y
−−−→ B ′
C
−−−→
γ
y
−−−→ C ′
D
−−−→
yδ
−−−→ D ′
−−−→
E
ǫ
y
E′
se α, β, δ, ǫ sono isomorfismi, allora anche il morfismo al centro γ è un isomorfismo.
Il lemma dei cinque si dimostra con la tecnica del “diagram chasing” (lasciamo la dimostrazione come esercizio).
Quello che segue è un utile corollario.
Corollario 15.1. Dato un diagramma commutativo di complessi di catene
j
0 −−−→ A• −−−→
α
y
0 −−−→ A′•
j′
π
B• −−−−→
β
y
π′
−−−−→ B•′
C• −−−→ 0
γ
y
−−−−→ C•′
−−−→
0
se due morfismi verticali (non importa quali dei tre) inducono isomorfismi in omologia, anche il rimanente
morfismo induce un isomorfismo in omologia. Ad esempio, se α⋆ e β⋆ sono isomorfismi, anche γ⋆ è un
isomorfismo.
Dimostrazione. È sufficiente applicare il lemma dei cinque al diagramma commutativo
... −−−→ Hn (A• )
α⋆
y
... −−−→ Hn (A′• )
−−−→ Hn (B• )
β
y ⋆
−−−→ Hn (B•′ )
−−−→ Hn (C• ) −−−→ Hn−1 (A• ) −−−→ Hn−1 (B• ) −−−→ ...
α⋆
γ⋆
β
y
y
y ⋆
−−−→ Hn (C•′ ) −−−→ Hn−1 (A′• ) −−−→ Hn−1 (B•′ ) −−−→ ...
(dove le righe sono le successioni esatte lunghe relative alle due righe del diagramma dato).
◦
∼
◦
Concludiamo questa sezione con dei risultati, in parte proposti come esercizio, che ci saranno utili in seguito.
µ
λ
Esercizio 16. Si verifichi che data una successione esatta A −→ B −→ C −→ D −→ E , c’è una successione
esatta corta
0 −→ cokerλ −→ C −→ kerµ −→ 0 .
Esercizio 17. Si consideri una successione esatta corta di gruppi abeliani
(17′ )
0
−−→ B
j
−−→ C
q
−−→ D
−−→ 0 .
Verificare che le condizioni che seguono sono equivalenti
i) ∃ s : D −→ C | q ◦ s = IdD ;
ii) ∃ π : C −→ B | π ◦ j = IdB ;
iii) esiste un diagramma commutativo ( i1 e π2 sono l’inclusione nel primo fattore e la proiezione sul secondo)
0
−−→ B
j
−−→
i1 ց
C
l∼
=
B⊕D
q
−−→ D
−−→ 0 .
ր π2
Definizione 17.1. Una successione esatta corta che soddisfi una (tutte) le condizioni di cui sopra si dice che
spacca.
Esempio 17.2. Se D è un gruppo abeliano libero, la successione (17′ ) spacca. Infatti, in questo caso è
sufficiente fissare una base di D e definire s : D → C scegliendo preimmagini degli elementi della base ed
estendendo linearmente.
Esempio 17.3. La successione esatta
due gruppi siano gruppi liberi).
·2
π
0 −→ Z −→ Z −→ Z2 −→ 0
non spacca (nonostante i primi
97
Il prodotto tensoriale ed il funtore “Tor”.
Per comodità ricordiamo brevemente la definizione di prodotto tensoriale. Dati due gruppi abeliani A e B si
definisce il prodotto tensoriale di A con B come il gruppo abeliano libero generato dal prodotto cartesiano
A × B modulo il sottogruppo delle relazioni naturali:
P
ni (ai ⊗ bi ) ni ∈ Z, ai ∈ A, bi ∈ B }
{
(18.1)
A⊗B
=
h (a + a′ ) ⊗ b − a ⊗ b − a′ ⊗ b , a ⊗ (b + b′ ) − a ⊗ b − a ⊗ b′ i
dove “h ... i” sta per “sottogruppo generato da ...”. Per gli elementi del prodotto tensoriale si usa la notazione
a ⊗ b (attenzione: per abuso di notazione, nella 18.1 abbiamo usato questa stessa simbologia per i generatori
del prodotto tensoriale).
Se V e W sono spazi vettoriali su un campo K si dà una definizione analoga:
P
λi (vi ⊗ wi ) λi ∈ K, vi ∈ V, wi ∈ W
{
(18.2)
V ⊗K W
=
h (λv+µv ) ⊗ w − λ(v ⊗ w) − µ(v ⊗ w) ,
′
′
}
v ⊗ (λw+µw ) − λ(v ⊗ w) − µ(v ⊗ w ′ )i
′
Si verifica senza difficoltà, almeno nel caso di spazi di dimensione finita, che se {bi } è una base di V e {di } è
una base di W , allora l’insieme {bi ⊗di } è una base di V ⊗K W (in particolare, dimV ⊗K W = dimV ·dimW ).
Nota. Più in generale, se A è un anello commutativo, V e W sono A-moduli, si definisce V ⊗A W in modo
analogo: come l’ A-modulo libero generato dagli elementi di V × W , modulo la relazione compatibile con la
struttura di A-modulo generata dalle uguaglianze a(v ⊗ w) = (av) ⊗ w = v ⊗ (aw) , (v + v ′ ) ⊗ w =
v ⊗ w + v ′ ⊗ w , v ⊗ (w + w′ ) = v ⊗ w + v ⊗ w′ , dove a ∈ A, v ∈ V, w ∈ W . Ogni gruppo abeliano è uno
Z-modulo e, per i gruppi abeliani, la definizione appena data si specializza alla (18.1) (e, naturalmente, per
gli spazi vettoriali si specializza alla definizione 18.2).
Per quanto concerne la proprietà universale del prodotto tensoriale rimandiamo lo studente ad un testo di
algebra.
f ⊗Id
G
Funtorialità. Un morfismo di gruppi abeliani f : A −→ B induce un morfismo A ⊗ G −−−−→
B⊗G
naturale. Ciò rende la tensorizzazione funtoriale: fissato un gruppo abeliano G, risulta
(19)
(g ◦ f ) ⊗ IdG
=
(g ⊗ IdG ) ◦ (f ⊗ IdG ) ,
IdA ⊗ IdG
=
IdA⊗G
(f : A → B, g : B → C sono morfismi di gruppi, e, come sempre, Id sta per “identità”).
Come conseguenza importante della funtorialità si ha che
(19.1)
il prodotto tensoriale con un gruppo abeliano G porta complessi di catene in complessi di catene
Infatti, se C• è un complesso di catene, risulta (∂◦IdG )◦(∂◦IdG ) = (∂◦∂)⊗IdG = 0 (cfr. def. 1 e notazione 5).
D’altro canto la tensorizzazione con G non conserva l’esattezza, in effetti non mantiene l’iniettività dei morfismi, ad esempio, pur essendo Z ֒→ Q un morfismo iniettivo, il morfismo associato Z ⊗ Z2 −→ Q ⊗ Z2
non lo è (né potrebbe esserlo, visto che Z ⊗ Z2 = Z2 mentre Q ⊗ Z2 = 0). In ogni modo,
(19.2)
i
π
la tensorizzazione con un gruppo abeliano è esatta a destra, i.e. se A −→ B −→ C −→ 0 è
una successione esatta di gruppi abeliani, allora tensorizzando con un gruppo abeliano si mantiene
l’esattezza a destra:
la successione
π ⊗Id
i⊗Id
G
G
A ⊗ G −−−−→
B ⊗ G −−−−→
C ⊗ G −−−→ 0
è esatta
(G arbitrario);
i
π
(19.3) la tensorizzazione con un gruppo abeliano libero è esatta, i.e. se 0 −→ A −→ B −→ C −→ 0
è una successione esatta di gruppi abeliani, tensorizzando con un gruppo abeliano libero si mantiene
l’esattezza:
i⊗Id
π ⊗Id
G
G
la successione 0 −−−→ A ⊗ G −−−−→
B ⊗ G −−−−→
C ⊗ G −−−→ 0 è esatta (G libero).
Questi due risultati non sono difficili, per quel che riguarda la (19.2) rimandiamo ad un testo di algebra.
Dimostrazione (della 19.3). Un gruppo abeliano libero è una somma diretta di copie di Z, d’altro canto la
tensorizzazione commuta con le somme dirette. Questo permette di ridursi al caso dove G = Z (caso che è
banale, essendo la tensorizzazione con Z, di fatto, l’identità).
98
Def. 20. Sia A un gruppo abeliano. Una risoluzione libera L• = L• (A) è una successione
esatta
L•
=
∂
∂
∂
π
3
2
1
... −−−→ L3 −−−
→ L2 −−−
→ L1 −−−
→ L0 −−−→ A −−−→ 0
dove gli Li sono gruppi abeliani liberi (n.b. A è in grado −1).
Innanzi tutto, osserviamo che esistono risoluzioni libere di ogni gruppo abeliano. Infatti, dato A, basta prendere
il gruppo libero su un insieme di generatori di A (ad esempio, lo stesso insieme A), questo sarà il nostro L0 e
sarà dotato di un morfismo π : L0 → A, quindi prendere il gruppo abeliano libero generato dal nucleo di π,
e, induttivamente, prendere quello generato da ker∂i . In effetti, poiché i sottogruppi di un gruppo abeliano
libero sono gruppi abeliani liberi (§A1, 15.3), esiste una risoluzione libera di A del tipo “generatori / relazioni”,
cioè del tipo
∂
0 −−→ R −−→ F
(20.1)
−−→ A −−→ 0
(L0 = F = “gruppo libero su un insieme di generatori”, L1 = R = “sottogruppo delle relazioni”).
Il lemma che segue (21) ci dice che risoluzioni libere di uno stesso gruppo abeliano sono omotope, in altri
termini un gruppo abeliano ammette un’unica risoluzione libera modulo omotopia.
Lemma 21. Siano L• e L′• due risoluzioni libere di un gruppo abeliano A. Si ha che esiste un’equivalenza
omotopica di complessi
tale che
ω−1 = IdA (identità su A)
ω : L• −→ L′•
(i.e. L• è unico a meno di omotopia).
Dimostrazione. La dimostrazione poggia su due affermazioni tecniche (che non dimostriamo):
i) esiste un morfismo ω : L• −→ L′• ;
ii) due tali morfismi ω e ϕ sono necessariamente omotopi.
(operativamente, sia per la costruzione di ω che per la costruzione dell’omotopia tra ω e ϕ si procede
per induzione). Detto ciò si conclude facilmente: scambiando i ruoli di L• e L′• deve esistere un morfismo
ω ′ : L′• −→ L• e, per la ii), le composizioni ω ′ ◦ω e ω ◦ω ′ devono essere omotope rispettivamente all’identità
su L• e all’identità su L′• .
Def. 22. Siano A e B gruppi abeliani, sia inoltre L• una risoluzione libera di A. Si pone
Tor(A, B)
:=
H1 (L• ⊗ B)
ker (∂1 ⊗IdB )
=
image (∂2 ⊗IdB )
La definizione è ben posta, ovvero il gruppo Tor(A, B) non dipende dalla risoluzione L• scelta. Infatti,
essendo il prodotto tensoriale con B funtoriale, a due risoluzioni L• e L′• (necessariamente omotopicamente
equivalenti per il lemma 21), corrispondono complessi di catene L• ⊗ B e L′• ⊗ B anch’essi omotopicamente
equivalenti, che pertanto hanno gruppi di omologia isomorfi (cfr. Teorema 11 e Corollario 14).
Usando la risoluzione libera “generatori / relazioni” (20.1), essendo ∂2 = 0 e ∂1 = ∂, si
ottiene
(22.1)
Tor(A, B)
=
ker ∂ ⊗ IdB : R ⊗ B −−−→ F ⊗ B .
Inciso 23. Quello visto è un caso particolare di una teoria più generale. Si definiscono i funtori derivati di
“⊗B” ponendo
Tor i (A, B) = Hi L·• ⊗ B
dove L· denota il complesso associato ad una risoluzione libera L (def. 20), definito cassando il termine A:
•
•
L·
•
:=
∂3
∂2
∂
∂
0
1
0.
L0 −−→
... −−→ L3 −−→ L2 −−→ L1 −−→
Si osservi che L·• è caratterizzato dalla proprietà di essere un complesso di gruppi liberi, nullo nei gradi negativi,
soddisfacente le identità H0 (L·• ) = A, Hi (L·• ) = 0 , ∀ i 6= 0 (la sua omologia in grado zero coincide con A ed
è un complesso esatto nei gradi strettamente positivi). I complessi L• ⊗ B e L·• ⊗ B hanno la stessa omologia
nei gradi strettamente positivi (semplicemente perché coincidono nei gradi non negativi). Quanto al gruppo
99
Tor 0 (A, B), risulta Tor 0 (A, B) := H0 (L·• ⊗B) = F ⊗B/Im(R⊗B) = A⊗B dove l’ultima uguaglianza segue
dall’esattezza a destra, precisamente dall’esattezza della successione R ⊗ B −→ F ⊗ B −→ A ⊗ B −→ 0 (è
interessante osservare che dall’esattezza di questa successione segue lo svanimento H0 (L• ⊗ B) = 0, per cui
se si usasse il complesso L• invece del complesso L·• , in grado zero si otterrebbe il gruppo nullo). Essendo la
risoluzione (20.1) nulla nei gradi i ≥ 2, risulta Hi (L• ⊗ B) = 0 per i ≥ 2. Riassumendo:
Tor 0 (A, B) = A ⊗ B ,
Tor 1 (A, B) = Tor(A, B) ,
Tor i (A, B) = 0 per i ≥ 2 .
Esercizio. Si verifichi quanto segue:
(23.1) Se G è un gruppo abeliano libero, allora Tor(A, G) = 0 ;
(23.2)
·m
Tor(Zm , B) = ker B −−→ B
(nucleo della moltiplicazione per m).
Suggerimento: Per la (23.1), si applichi alla (20.1) il fatto che la tensorizzazione con G mantiene l’esattezza
·m
(cfr. 19.3). Per la (23.2), si tensorizzi con B la risoluzione libera 0 −→ Z −−→ Z −→ Zm −→ 0 , quindi
si applichi la definizione (22.1).
Stabiliamo ora alcune conseguenze elementari della teoria svolta.
∂
Corollario 24. Se 0 −→ R −→ F −→ A −→ 0 è una successione esatta di gruppi abeliani ed F è
libero, allora la tensorizzazione con un gruppo abeliano B dà la successione esatta
(24.1)
∂⊗Id
B
0 −−−→ Tor(A, B) −−−→ R ⊗ B −−−−→
F ⊗ B −−−→ A ⊗ B −−−→ 0
Dimostrazione. Il gruppo R è libero in quanto sottogruppo di F che è libero per ipotesi (§A1, 15.3), ne segue
che quella data è una risoluzione libera di A. L’esattezza della (24.1) segue dall’esattezza a destra (19.2) e
dalla definizione stessa di Tor(A, B) (cfr. 22.1).
In particolare, se A è un gruppo abeliano libero, si può prendere F = A ed R = 0 (e nella 24.1 si ha
R ⊗ B = 0). Pertanto:
(24.2)
Tor(A, B) = 0
(se A è un gruppo abeliano libero).
Corollario 25. Tensorizzando con un gruppo abeliano arbitrario G una successione esatta di gruppi abeliani
liberi
Ln −→ Ln−1 −→ ... −→ L2 −→ L1 −→ L0 −→ 0
si ottiene una successione esatta (in particolare, ciò vale anche per le successioni dove a sinistra c’è il gruppo
nullo!).
Dimostrazione. Quella indicata, può essere interpretata come troncamento al grado n di una risoluzione
libera del gruppo nullo (omotopa alla successione nulla per il lemma 21), la tensorizzazione con G ne conserva
l’esattezza per il ragionamento che segue la definizione 22 (oppure, se preferite, perché se L• = L·• è una
risoluzione libera del gruppo nullo, si deve avere Hi L• ⊗ G = Tor i (0, G) = 0, ∀ i).
Sebbene la definizione non sia simmetrica, dati due gruppi abeliani A e B c’è un isomorfismo naturale
(26)
Tor(A, B) ∼
= Tor(B, A)
Dimostrazione. Consideriamo risoluzioni libere generatori/relazioni di A e di B, rispettivamente
∂
0 −→ RA −→ FA −→ A −→ 0
δ
0 −→ RB −→ FB −→ B −→ 0 .
,
Tensorizzando la risoluzione di B con RA e con FA , per la (19.3) si ottengono due successioni esatte
0 → RB ⊗ RA → FB ⊗ RA → B ⊗ RA → 0
e
0 → RB ⊗ FA → FB ⊗ FA → B ⊗ FA → 0 .
Queste due successioni esatte possono essere scritte nel diagramma che segue
100
0
−−→
0
−−→
0
↓
RB ⊗ RA
α
y
−−→
RB ⊗ FA
↓
0
−−→
0
↓
FB ⊗ RA
β
y
FB ⊗ FA
↓
0
−−→
−−→
0
↓
B ⊗ RA
γ
y
B ⊗ FA
↓
0
−−→
0
−−→
0
dove i morfismi verticali α, β e γ sono rispettivamente IdRB ⊗ ∂ , IdFB ⊗ ∂ e IdB ⊗ ∂ (∂ : RA → FA come
sopra). Sappiamo che le righe del diagramma sono esatte, d’altro canto le colonne sono complessi per ragioni
banali. Di conseguenza, il diagramma è una successione esatta corta di complessi (verticali). La corrispondente
successione esatta lunga in omologia è la successione
(26.1) 0 −−→ ker α −−→ ker β
(= 0)
−→
δ
ω
−−→ RB ⊗ A −−→ FB ⊗ A −−→ B ⊗ A −−→ 0
ker γ
(∼
= Tor(A, B))
(= 0)
(essendo δ il morfismo di incollamento). Per quel che concerne i risultati tra parentesi, i morfismi α e β sono
iniettivi in quanto si ottengono tensorizziamo a sinistra ∂ : RA −→ FA (che è un morfismo iniettivo) con un
gruppo libero, inoltre risulta
∼
:=
Tor(A, B)
ker γ = ker B ⊗ RA −→ B ⊗ FA
= ker RA ⊗ B −→ FA ⊗ B
(22.1)
A questo punto abbiamo concluso:
ker γ
∼
=
ker ω
=
Tor(B, A)
dove l’isomorfismo segue dall’esattezza della (26.1), ed è naturale in quanto dato dal morfismo di incollamento δ,
l’uguaglianza segue dalla definizione stessa di Tor(B, A) .
Alla luce dell’isomorfismo (26), la (23.1) e la (24.2) sono le due facce di una stessa medaglia: Tor(A, B) = 0
se uno dei due gruppi in questione è libero. In effetti vale un risultato più forte:
(27)
Tor(A, B) = 0
se uno dei due gruppi in questione è privo di torsione
(questo risultato non lo dimostriamo).
101
Il teorema dei coefficienti universali.
Dato un complesso di catene libero (C• , ∂) ed un gruppo abeliano G, consideriamo il
complesso
( C• ⊗ G ,
(28)
∂G := ∂ ⊗ IdG )
(IdG denota l’identità su G)
detto complesso delle catene a coefficienti in G .
P
Nota 28.1. Poiché C• è libero, si identifica con l’insieme delle espressioni del tipo
ni σi , essendo S = {σi }
un insieme di generatori e gli ni interi (cfr. §A1,
5).
Il
complesso
(C
⊗
G,
∂
)
non
è altro che il complesso
•
G
P
ottenuto considerando le espressioni del tipo
ni σi con gli ni in G invece che in Z, essendo l’operatore di
bordo ∂G definito tramite ∂ :
P
P
dato σ ∈ S ,
se ∂σ =
ci ςi , ci ∈ Z, ςi ∈ S ,
si pone ∂G (gσ) =
ci g ςi
(nello scrivere ci g stiamo vedendo
G come
P
P Z-modulo: ci g = g +...+g, ci volte). Naturalmente la definizione
si estende per linearità: ∂G ( gi σi ) =
∂G (gi σi ).
Ci si pone il problema di determinare l’omologia del complesso C• ⊗G in funzione dell’omologia
del complesso C• . Iniziamo con alcune considerazioni. Premettiamo una notazione:
Z•
=
complesso dei cicli di C• (i.e. ker ∂);
B•′
=
complesso dei bordi scalati di un grado: Bn′ := Bn−1 (essendo Bn−1 := ∂Cn ),
entrambi col bordo indotto da C• , quindi nullo. Poiché Zn := ker∂n , c’è una successione
esatta corta di complessi31
(29)
−−−→
0
i
−−−→
Z•
∂
B•′
−−−→
C•
−−−→
0
Di conseguenza, abbiamo una successione esatta lunga in omologia con le caratteristiche indicate:
0
ր
ց
... Hn+1 (B•′ )
(29.1)
= Bn
δ
−−−→
Hn (Z• )
⊆
i
⋆
−−−
→
Hn (C• )
∂
⋆
−−−
→
= Zn
Hn (B•′ )
−−−→
= Bn−1
(inclusione naturale)
i.e.:
(♣) il morfismo di incollamento δ è l’inclusione naturale degli n-bordi negli n-cicli; i⋆ è suriettiva; ∂⋆ = 0.
Dimostrazione. Le uguaglianze scritte nell’ultima riga seguono dal fatto che Z• e B•′ hanno entrambi bordo
nullo (in generale, i gruppi di omologia di un complesso avente bordo nullo coincidono con i gruppi del complesso
stesso). Per come è definito il morfismo di incollamento (nota 9.1), si deve prendere un n-bordo, sollevarlo
ad una catena tramite ∂ (morfismo nella 29), quindi prenderne di nuovo il bordo, cioè tornare al bordo di
partenza! Infine vedere quest’ultimo come ciclo. La suriettività di i⋆ segue dalla definizione di omologia.
Essendo la successione (29.1) esatta, la relazione ∂⋆ = 0 segue dalla suriettività di i⋆ .
Come conseguenza delle proprietà (♣), la successione esatta lunga (29.1) si spezza in successioni esatte corte
(29.2)
0
−−−−→
Bn
δ
−−−−→
Zn
i
−−−⋆−→
Hn (C• )
−−−−→
0
Fin qui non abbiamo scoperto nulla di nuovo: dalla (29.2) ritroviamo la definizione di omologia Hn (C• ) =
Zn /Bn . Il punto è che quanto visto ci serve sia da guida che da termine di confronto, volendo ripetere il
discorso lavorando con coefficienti.
31
Attenzione! sebbene come successione di gruppi abeliani spacchi, il complesso C• in generale non ha bordo nullo, di conseguenza
non è somma diretta dei due complessi ai lati Z• e B•′ .
102
Tensorizzato la successione (29) col gruppo G, questa resta esatta (perché C• è libero e sottogruppi di gruppi
liberi sono anch’essi liberi), di conseguenza si ottiene la successione
∂
i
G
0 −−→ Z• ⊗ G −−−→ C• ⊗ G −−−
→ B•′ ⊗ G
(30)
−−→ 0
La corrispondente successione esatta lunga in omologia è la successione
(30.1)
∂G
i
δ
δn−1
⋆
→ Hn (B•′ ⊗ G) −−−−→ ...
... Hn+1 (B•′ ⊗ G) −−−n−→ Hn (Z• ⊗ G) −−−⋆−→ Hn (C• ⊗ G) −−−−
= Bn ⊗ G
= Zn ⊗ G
= Bn−1 ⊗ G
Questa volta le cose non vanno bene come prima: il morfismo ∂G ⋆ non si fattorizza più tramite il morfismo
nullo, cosa che invece accadeva per ∂⋆ (cfr. 29.1). Ciononostante siamo in grado di interpretare i vari termini
della successione esatta corta
(31)
∂G
i
⋆
⋆
→ Hn (C• ⊗ G) −−−→
ker δn−1 −−→ 0
0 −−→ coker δn −−−
associata alla (30.1) (cfr. esercizio 16). L’interpretazione ce la fornisce il lemma che segue.
Lemma 32. Si ha
coker δn = Hn (C• ) ⊗ G ,
ker δn−1 = Tor Hn−1 (C• ), G .
Nota 33. Ricordiamo dalla sezione precedente che dati due gruppi abeliani H e G, e data una qualsiasi
i
risoluzione libera 0 −→ R −→ F −→ H −→ 0 di H , si definisce
Tor(H, G)
:=
ker(i ⊗ IdG : R ⊗ G −→ F ⊗ G)
(questo gruppo non dipende dalla risoluzione scelta).
Dimostrazione (del Lemma 32). L’uguaglianza coker δn = Hn (C• ) ⊗ G segue dal fatto che tensorizzando
la (29.2) con G l’esattezza a destra si mantiene, ovvero si ottiene la successione
δ
Bn ⊗ G −−n→ Zn ⊗ G −−→ Hn (C• ) ⊗ G −−→ 0 .
δn−1
La (29.2), scritta per l’indice n − 1, è la successione 0 −−→ Bn−1 −−−→ Zn−1 −−→ Hn−1 (C• ) −−→ 0 .
Essendo questa una risoluzione libera del gruppo Hn−1 (C• ), tensorizzandola
con G, per definizione stessa
dell’operatore “Tor” si ottiene ker (δn−1 ⊗ IdG ) = Tor Hn−1 (C• ), G (cfr. nota 33).
Enunciamo quanto si ottiene mettendo insieme la successione (31) e l’interpretazione dei termini che vi compaiono (lemma 32), risultato noto col nome di Teorema dei coefficienti universali.
Teorema 34 (dei coefficienti universali). Dato un complesso di catene libero (C• , ∂) ed
un gruppo abeliano G c’è una successione esatta naturale
i
∂G
⋆
⋆
0 −−−→ Hn (C• ) ⊗ G −−−
Tor Hn−1 (C• ), G
→ Hn (C• ⊗ G) −−−→
−−−→ 0
103
La formula di Künneth in algebra omologica.
Def. 35. Siano (C• , ∂) e (D• , δ) due complessi di catene liberi. Si definisce il complesso
C • ⊗ D• , ∂ ⊗ δ
ponendo
L
(C• ⊗ D• )n =
Ci ⊗ Dj , ∂ ⊗ δ(σi ⊗ τj ) = ∂σi ⊗ τj + (−1)i σi ⊗ δτj
i+j = n
(σi ∈ Ci , τj ∈ Dj , la definizione viene estesa per linearità). Si verifica facilmente che risulta (∂⊗δ)◦(∂⊗δ) = 0,
per cui quello introdotto è effettivamente un complesso.
Nota. I gruppi C• e D• sono gruppi abeliani graduati, in particolare sono gruppi abeliani, per cui ha
perfettamente senso considerare il gruppo C• ⊗ D• , la definizione serve solo a dotarlo di una graduazione e di
un endomorfismo di grado −1 che lo rende un complesso (cfr. Notazione 5).
Teorema 36. Dati due complessi di catene liberi (C• , ∂) e (D• , δ) c’è una successione
esatta naturale
L
L
ξ
0 −→
Hi (C• )⊗Hj (D• ) −−→ Hn (C• ⊗D• ) −−→
Tor Hp (C• ), Hq (D• ) −→ 0
i+j = n
p+q = n−1
La dimostrazione di questo risultato non è particolarmente difficile ma richiede un po’ di lavoro. Esula
abbastanza dai nostri obiettivi per cui non la daremo. Piuttosto, ci limitiamo ad alcune osservazioni che ci
sembrano interessanti.
(36.1) Il morfismo ξ è il morfismo indotto dal morfismo definito a livello di catene (dalla definizione di ∂ ⊗ δ
segue che se ∂σi = 0 e δτj = 0, i.e. rappresentano classi di omologia, allora risulta ∂ ⊗ δ(σi ⊗ τj ) = 0,
i.e. anche σi ⊗ τj rappresenta una classe di omologia).
Il Teorema (36) generalizza il Teorema dei coefficienti universali (34), infatti:
(36.2) Se G è un gruppo abeliano (arbitrario), e D• = L·• (G) è il complesso associato ad una risoluzione libera
di G (cfr. Def. 20 e inciso 23), in quanto risulta H0 (D• ) = G, Hi (D• ) = 0 ∀ i 6= 0, la successione
esatta del Teorema (36) si riduce alla successione esatta del Teorema (34).
104
Funtore Hom e coefficienti universali in coomologia.
Iniziamo con alcune osservazioni. Sia G un gruppo abeliano che fissiamo una volta per tutte. Si ha che
(40.1) un morfismo di gruppi abeliani f : A −→ B
induce un morfismo f ∗ : Hom(B, G) −→ Hom(A, G) , φ 7→ φ ◦ f ;
(40.2) funtorialità:
( ∗
IdA = Id Hom(A, G) ;
(g ◦ f )∗ = f ∗ ◦ g ∗ , dove f : A −→ B e g : B −→ C sono morfismi di gruppi abeliani.
Tutto ciò si può esprimere dicendo che l’operatore Hom(-, G) che ad un gruppo abeliano A associa il gruppo
abeliano Hom(A, G) ed a un morfismo di gruppi abeliani f associa il morfismo f ∗ è un funtore controvariante
(la freccia di f ∗ va nella direzione opposta a quella di f ) della categoria dei gruppi abeliani in se.
Lemma 41. Di seguito, consideriamo successioni esatte di gruppi abeliani
i) una successione esatta
f
q
D −−→ C −−→ B −−→ 0
induce una successione esatta
ii) una successione esatta che spacca (def. 17.1)
induce una successione esatta
q∗
f∗
0 −−→ Hom(B, G) −−→ Hom(C, G) −−→ Hom(D, G) ;
f
q
0 −−→ D −−→ C −−→ B −−→ 0
q∗
f∗
0 −−→ Hom(B, G) −−→ Hom(C, G) −−→ Hom(D, G) −−→ 0
Nell’ipotesi che B sia un gruppo abeliano libero, l’ipotesi che la successione spacchi è automaticamente
verificata (cfr. esempio 17.2).
Dimostrazione. Effettuiamo le varie verifiche.
• kerq ∗ = 0 : q ∗ (ϕ) = 0 =⇒ ϕ ◦ q = 0 =⇒ ϕ = 0 (perché q è suriettiva);
• Imq ∗ ⊆ kerf ∗ : 0 = 0∗ = (q ◦ f )∗ = f ∗ ◦ q ∗ ;
e
• Imq ∗ ⊇ kerf ∗ : data ψ ∈ kerf ∗ si definisce ψ(b)
= ψ(c) , c ∈ q −1 (b)
(ben definita perché ψ(c − c′ ) = 0 se c′ ∈ q −1 (b)).
Quanto sopra dimostra la i). Resta da provare che se esiste s : B → C soddisfacente q ◦ s = IdB e
f è iniettiva, allora f ∗ è suriettiva. Dato un morfismo η : D → G si vuole estenderlo ad un morfismo
ηe : C → G. A tal fine, dato σ ∈ C si definisce ηe(σ) = η(σ − sqσ) (poiché q(σ − sqσ) = qσ − qsqσ =
qσ − IdB qσ = 0, si ha σ − sqσ ∈ D).
Come conseguenza della funtorialità (40.2), l’operatore Hom(-, G) porta complessi discendenti (di catene)
in complessi ascendenti (per questo detti di cocatene). Infatti, nelle notazioni della (40.2), se g ◦ f = 0, si
ha f ∗ ◦ g ∗ = (g ◦ f )∗ = 0 (nel caso dei complessi, dopo aver applicato Hom(-, G) la composizione di due
morfismi successivi continua ad essere nulla).
Def. 42. Dato un complesso di catene di gruppi abeliani
C• = (C• , ∂) :
∂n+1
∂
n
. . . −−−→ Cn+1 −−−→ Cn −−−
→ Cn−1 −−−→ . . .
si definisce complesso duale a valori in G, i cui elementi chiameremo cocatene, il complesso
dn−1
dn
Hom(C• , G), d : . . . Hom(Cn−1 , G) −−−→ Hom(Cn , G) −−−
→ Hom(Cn+1 , G) . . .
dove32 d = ∂ ∗
(pertanto (dn ϕ)η = ϕ(∂n+1 η), ∀ η ∈ Cn+1 ).
Ribadiamo quanto già osservato in precedenza: questa volta le frecce vanno nel verso opposto e risulta
d ◦ d = ∂ ∗ ◦ ∂ ∗ = (∂ ◦ ∂)∗ = 0∗ = 0 ,
i.e. Hom(C• , G) è effettivamente un complesso di cocatene (cfr. inciso 3). Di questo complesso se ne può
calcolare la coomologia (cosı̀ chiamata in quanto “omologia” di un complesso di cocatene):
Cosı̀ come ∂ è un morfismo di grado −1 definito su C• e ∂n è la restrizione di ∂ alle n-catene, il morfismo d = ∂ ∗ è un morfismo
di grado 1 definito su Hom(C• , G) e dn = (∂ ∗ )n è la restrizione di d alle n-cocatene, questo significa che dn = (∂n+1 )∗ . Per
evitare che ci si possa confondere, l’indice in basso indica sempre il grado degli oggetti del dominio: nell’omettere le parentesi,
∗ si intende d = (∂ ∗ )
∗ ...che, naturalmente, non scriveremo mai più!
scrivendo ∂n
n
n e non si intende (∂n )
32
105
Def. 43. Dato un complesso di catene di gruppi abeliani C• = (C• , ∂), si pone
H n C• ; G
:=
H n Hom(C• , G)
=
(inciso 3)
ker dn
.
Im dn−1
Oss. 43.1. I gruppi kerdn e Imdn−1 soddisfano le relazioni che seguono:
• ker dn =
ϕ : Cn → G ϕ ◦ ∂n+1 = 0, i.e. ϕ|Im∂n+1 = 0
• Im dn−1
=
= “n-cocatene che si annullano sugli n-bordi”;
ϕ : Cn → G ∃ η : Cn−1 → G tale che ϕ = η ◦ ∂n
⊆ “n-cocatene che si annullano sugli n-cicli”.
Cn
∼(♣) Im∂n ,
Inoltre, se ϕ è una n-cocatena che si annulla sugli n-cicli, allora induce un morfismo su ker
∂n =
di conseguenza esiste un morfismo η ′ definito sugli n − 1 bordi soddisfacente la relazione ϕ = η ′ ◦ ∂n . Se
tale morfismo η ′ si estende ad un morfismo definito sulle n − 1 catene, allora ϕ ∈ Im dn−1 . Riassumendo,
Im dn−1 è costituito dalle n-cocatene che si annullano sugli n-cicli e che, viste tramite (♣) come morfismi
sugli n − 1 bordi (= Im∂n ) si estendono alle n − 1 catene.
In perfetta analogia con quanto accade nel caso del prodotto tensoriale con un gruppo G, inteso come funtore
che ad un gruppo abeliano H associa il gruppo H ⊗ G, vale un teorema dei coefficienti universali per il funtore
Hom(-, G). Prima di procedere introduciamo i gruppi Ext(A, G) .
Def. 44.
Siano A e G gruppi abeliani, sia inoltre L• una risoluzione libera di A
(cfr. def. 20). Si pone
ker d1
Ext(A, G) := H 1 Hom(L• , G)
=
image d0
d0
d1
dove ... −→ Hom(L0 , G) −−→ Hom(L1 , G) −−→ Hom(L2 , G) −→ ... è il complesso duale del complesso L• .
Come nel caso del funtore “Tor”, e per la stessa ragione, la definizione è ben posta, ovvero il gruppo Ext(A, G)
non dipende dalla risoluzione L• scelta: essendo Hom(-, G) funtoriale, a due risoluzioni L• e L′• (omotopicamente equivalenti per il lemma 21), corrispondono complessi di cocatene Hom(L• , G) e Hom(L′• , G) anch’essi
omotopicamente equivalenti, che pertanto hanno gruppi di coomologia isomorfi (cfr. Teorema 11, Corollario 14,
Inciso 3).
Teorema 45 (dei coefficienti universali). Siano C• un complesso di catene libero e G un
gruppo abeliano. Per ogni intero n, c’è una successione esatta naturale
j
q
0 −−−→ Ext Hn−1 (C• ), G −−−→ H n C• ; G −−−→ Hom Hn (C• ), G −−−→ 0
Un elemento ϕ̄ ∈ H n (C• ; G) è rappresentato da una n-cocatena ϕ : Cn → G che si annulla sugli
n-bordi (cfr. Oss. 43.1). Una tale ϕ, per restrizione agli n-cicli e passaggio al quoziente, definisce un elemento
ϕ′ ∈ Hom(Hn (C• ), G). Si definisce q(ϕ̄) = ϕ′ . La definizione è ben posta perché le n-cocatene in Im dn−1
si annullano sugli n-cicli (cfr. Oss. 43.1).
Lemma 45.1. Il morfismo q è suriettivo.
Dimostrazione (del lemma). Premessa: la successione esatta di gruppi liberi 0 → Zn −→ Cn −→ Bn−1 → 0
(cfr. 29), induce un morfismo Hom(Cn , G) −→ Hom(Zn , G) suriettivo (cfr. 41, ii)).
Un morfismo ϕ′ ∈ Hom(Hn (C• ), G) definisce un morfismo sugli n-cicli che si annulla sugli n-bordi (si
componga la proiezione ker∂n −→ Hn (C• ) con ϕ′ : Hn (C• ) −→ G), i.e. un morfismo ϕ ∈ Hom(Zn , G)
(sempre nullo sugli n-bordi). Per la premessa, tale morfismo si estende ad un morfismo definito sulle n-catene
ϕ : Cn −→ G (che continuerà ad annullarsi sugli n-bordi). Di quest’ultimo ne prendiamo la classe
ϕ̄ ∈ H n (C• ; G). Naturalmente si avrà q(ϕ̄) = ϕ′ .
Sottolineiamo che la suriettività di q segue dall’ipotesi che C• sia libero (o meglio, dal fatto che Bn−1 lo sia).
106
Il nucleo di q è dato dalle cocatene che si annullano sugli n-cicli modulo morfismi in Imdn−1 :
(45.2)
ker q
=
ϕ : Cn
ϕ : Cn −→ G tali che ϕ|n-cicli = 0
−→ G ∃ η : Cn−1 −→ G tale che ϕ = η ◦ ∂n
i.e. il nucleo di q misura esattamente di quanto l’inclusione che compare nella seconda parte
della (43.1) non sia un’uguaglianza.
Nota. Un elemento del numeratore è una estensione del morfismo nullo sugli n-cicli, mentre il quoziente kerq
dipende solo da Hn−1 (C• ) e da G (questo punto verrà chiarito nel corso della dimostrazione del Teorema 45).
Il fatto che gli elementi di kerq siano “estensioni” dà una giustificazione dell’uso della terminologia “Ext(...)”.
Dimostrazione (del Teorema 45). Ripetiamo, cambiando quello che c’è da cambiare, per il funtore Hom(-, G)
quanto già visto per il funtore - ⊗ G. Poniamo
Z• = complesso dei cicli di C• (i.e. ker ∂ );
B•′ = complesso dei bordi scalati di un grado: Bn′ := Bn−1 (essendo Bn−1 := ∂ Cn ),
entrambi col bordo indotto da C• , quindi nullo. C’è una successione esatta corta di complessi di catene
(45.3)
0
−−−−→
Z•
i
−−−−→
C•
∂
−−−−→
B•′
−−−−→
0
I complessi della (45.3) sono complessi liberi, ovvero gruppi liberi (a tal fine ricordiamo che C• è libero per
ipotesi e che un sottogruppo di un gruppo libero è anch’esso libero). Di conseguenza, applicando il funtore
Hom(-, G) si ottiene una successione, di nuovo esatta (cfr. lemma 41), di complessi di cocatene
(45.4)
0
d = ∂∗
−−−→ Hom(B•′ , G) −−−−−→ Hom(C• , G)
j = i∗
−−−−−→ Hom(Z• , G) −−−→ 0
dove i morfismi di cobordo dei complessi Hom(B•′ , G) e Hom(Z• , G) sono entrambi nulli (in quanto nulli
i morfismi di bordo dei complessi B•′ e Z• ). La corrispondente successione esatta lunga in coomologia è la
successione
∗G
δ
j⋆
d⋆
⋆
∗G
δ
⋆
(45.5) . . . H n−1 (Z• ) −−−→ H n (B ′ •G ) −−−→ H n (C• ; G) −−−→ H n (Z• ) −−−→ H n+1 (B ′ •G ) . . .
= Hom(Zn−1 , G)
′
= Hom(Bn
, G)
= Hom(Zn , G)
∗
dove Z• G := Hom(Z• , G), B ′ ⋆•G := Hom(B ′ • , G) (hanno entrambi cobordo nullo in quanto Z• e B ′ •
hanno bordo nullo) e dove i vari δ sono i morfismi di incollamento. Le uguaglianze indicate nella riga in
piccolo seguono dal fatto che i complessi corrispondenti hanno cobordo nullo. Da questa successione esatta
lunga estraiamo le successioni esatte corte
(45.6)
0
−−−→
coker δ n−1
d⋆
j⋆
−−−→ H n (C• ; G) −−−→ ker δ n
−−−→
0
(cfr. esercizio 16)
(naturalmente δ n−1 e δ n denotano i morfismi di incollamento δ della (45.4), rispettivamente nei gradi n − 1
ed n). Affermiamo che la (45.6) è la successione esatta del teorema dei coefficienti universali (45). Infatti,
per la nota (9.1) il morfismo di incollamento δ, in grado n, opera come segue (si guardi la (45.4)): prende
ϕ0 ∈ Hom(Zn , G), lo solleva a ϕ ∈ Hom(Cn , G), ne prende il cobordo, i.e. dϕ = ϕ ◦ ∂ ∈ Hom(Cn+1 , G),
′
, G) = Hom(Bn , G). Quest’ultima operazione disfa la
ed infine lo solleva tramite d = ∂ ∗ in Hom(Bn+1
precedente e restituisce la restrizione ϕ|Bn ∈ Hom(Bn , G). In definitiva
(45.7) δ n = i⋆ :
Hom(Zn , G) −→ Hom(Bn , G) ,
dove i : Bn −→ Zn denota l’inclusione.
Per la (45.7), il gruppo ker δ si identifica col gruppo Hom Hn (C• ), G
(teorema di omomorfismo di
gruppi) nonché si ha j ⋆ = q (essendo j ⋆ il morfismo che compare nella
(45.6) e q il morfismo che
compare nell’enunciato). Infine, si ha coker δ n−1 = Ext Hn−1 (C• ), G (cfr. Def. 44) perché la successione 0 −→ Bn−1 −→ Zn−1 −→ Hn−1 (C• ) −→ 0 è una risoluzione libera di Hn−1 (C• ) e
0 −→ Hom(Zn−1 , G) −→ Hom(Bn−1 , G) −→ 0 ne è il complesso associato.
n
107
Cenni sulle categorie abeliane.
Come accennato all’inizio del paragrafo, l’algebra omologica può essere trattata in un contesto più generale, il
contesto astratto delle categorie abeliane. Le definizioni ed i risultati visti valgono per le categorie abeliane,
di fatto senza cambiare una virgola nei rispettivi enunciati (definizione dell’omologia, successione esatta lunga
associata ad una successione esatta corta di complessi, definizione dell’omotopia di complessi, uguaglianza dei
morfismi indotti in omologia da morfismi di complessi omotopi, lemma dei cinque e molti altri).
Per non appesantire il discorso, diamo la definizione di categoria abeliana in termini intuitivi, o meglio che
hanno un senso per una categoria “concreta” (i.e. dove gli oggetti sono, in particolare, insiemi) qual è quella
dei gruppi abeliani, come pure quella degli spazi vettoriali.
Definizione. Una categoria abeliana è un insieme di oggetti e morfismi (detti anche frecce) che soddisfano gli
assiomi che seguono.
• ogni morfismo “collega” due oggetti, due morfismi “consecutivi” si possono comporre e la composizione è
associativa;
• esiste l’oggetto zero, denotato con 0 , con la proprietà che esistono unici 0 → A e A → 0 per ogni
oggetto A;
• esistono nucleo e conucleo per ogni morfismo f : A → B , denotati rispettivamente con kerf e cokerf
(formalmente, un nucleo è una coppia (K, i) , con i : K → A monomorfismo soddisfacente f ◦ i = 0
e la proprietà di fattorizzare ogni morfismo g : X → A tale che f ◦ g = 0; un conucleo è una coppia
(C, p) , con p : B → C epimorfismo soddisfacente p ◦ f = 0 e la proprietà di fattorizzare ogni morfismo
h : B → Y tale che h ◦ f = 0. Quanto al significato dei termini usati, per definizione,
i) un monomorfismo è un morfismo j : H → A soddisfacente la proprietà di cancellazione seguente:
j
r
j
s
j ◦ r : X −→ H −→ A = j ◦ s : X −→ H −→ A
=⇒
r = s
ii) un epimorfismo è un morfismo π : A → H soddisfacente la proprietà di cancellazione seguente:
π
r
r ◦ π : A −→ H −→ X
=
π
s
s ◦ π : A −→ H −→ X
=⇒
r = s ).
• per ogni morfismo f : A → B , esiste un isomorfismo canonico coker(kerf ֒→ A) −→ ker(B → cokerf ) ,
cioè la coimmagine (:= conucleo del nucleo) e l’immagine (:= nucleo del conucleo) sono canonicamente
isomorfe;
• Hom(A, B) è un gruppo abeliano (per ogni coppia di oggetti A e B) e la composizione è bilineare
(cioè g ◦ (f + fe) = g ◦ f + g ◦ fe, (g + ge) ◦ f = g ◦ f + ge ◦ f per ogni terna di oggetti A, B, C ed ogni
f, fe ∈ Hom(A, B), g, e
g ∈ Hom(B, C))
• esistono le somme dirette: esiste A ⊕ B per ogni coppia di oggetti A e B
(formalmente, una somma diretta è una terna (A ⊕ B, iA : A ֒→ A ⊕ B, iB : B ֒→ A ⊕ B), dove iA ed iB
fattorizzano rispettivamente i morfismi definiti su A e quelli definiti su B , entrambi a valori in un terzo
oggetto C ).
Esercizio. Verificare che le categorie che seguono soddisfano gli assiomi indicati sopra: gruppi abeliani e
morfismi di gruppi, spazi vettoriali su un campo e applicazioni lineari. Inoltre, verificare che per esse la
nozione di monomorfismo coincide con quella di morfismo iniettivo (suggerimento: considerare X = ker j ,
r = “inclusione”, s = 0) e che quella di epimorfismo coincide con quella di morfismo suriettivo (suggerimento:
considerare X = coker π, r = “proiezione”, s = 0).
Nota. Vale la pena osservare che le nozioni “morfismo iniettivo” e “morfismo suriettivo” hanno senso solo se
gli oggetti della categoria in questione sono, in particolare, insiemi.
108
Bibliografia
[D]
[Hat]
[Kos]
[Mas]
[Rot]
[Sp]
[Vas]
Lectures On Algebraic Topology.
Hatcher A., Algebraic Topology, Cambridge University Press, 2002.
Kosniowski C., A first course in Algebraic Topology, Cambridge University Press, 1980.
Massey W.S., A Basic Course in Algebraic Topology, GTM 127, 1991.
Joseph J. Rotman, An Introduction to Algebraic Topology.
Spanier E. H., Algebraic Topology, McGraw-Hill, 1966.
Vassiliev V. A., Introduction to Topology, Student Mathematical Library, v.14, 2001.
Dold A.,