Anno Accademico 2009/2010
POLITECNICO DI MILANO
TESI DI LAUREA
Ingegneria biomedica
Modello biomeccanico dell’arto superiore per riabilitazione
robotica assistita
RELATORE: Ing. Alessandra Pedrocchi
CORRELATORI: Ing. Matteo Malosio, Ing. Simona Ferrante
Autore:
Alessandro Scano
1
735027
INDICE
1 – Sommario
4
1.1 – Abstract
8
2 – Stato dell’arte
12
2.1 – Riabilitazione robotica
12
2.2 – Modelli muscolo scheletrici dell’arto superiore
17
3 – Obiettivi della tesi
20
4 – Piattaforma riabilitativa
22
5 – Modello biomeccanico
26
5.1 – Modello cinematico
26
5.1.1 – Scelte progettuali
26
5.1.2 – Descrizione della convenzione di Denavit – Hartenberg
29
5.1.3 – Cinematica diretta
33
5.1.4 – Vincoli cinematici dei giunti
33
5.1.5 – Cinematica inversa
36
5.1.6 – Determinazione dei valori ai giunti
40
5.2 – Controllo del robot
45
5.3 – Compensazione gravità
46
5.4 – Modello muscolare
50
5.4.1 - Scopo della modellazione muscolare
50
5.4.2 – Generalità
50
5.4.3 – Modellazione dei muscoli
53
5.4.3.1 – Muscoli “planari”
55
5.4.3.2 – Muscoli della spalla
57
5.4.4 – Azioni scambiate all’end effector
58
5.4.5 – Analisi cinetostatica e matrice Jm
59
5.4.6 – Modellazione giunto bidimensionale: gomito
61
2
5.4.7 – Modellazione giunto sferico: spalla
62
5.4.8 – Matrice di attivazione muscolare
63
5.4.9 – Modello matematico muscolare
65
5.5 – Potenza espressa ai giunti
66
6 – Validazione modello
67
6.1 – Protocollo di acquisizione
67
6.2 – Compensazione gravità: previsioni modello
69
6.3 – Parametri meccanici: previsioni modello
73
7 – Conclusioni
88
8 - Bibliografia
90
3
1 - SOMMARIO
Stato dell’arte: riabilitazione robotica e modelli meccanici di arto superiore
La riabilitazione robotica per pazienti che soffrono di deficit neurologici è una strategia di
trattamento che si rivela efficace per il ripristino almeno parziale delle funzioni perdute. Si
distinguono due approcci riabilitativi fondamentali: end effector-based, in cui il paziente impugna
la parte terminale del robot, che lo assiste nel movimento, e tramite esoscheletro. L’approccio
riabilitativo robotico consente numerosi vantaggi: ripetibilità del gesto, maggiore autonomia
durante l’esecuzione dei task, possibilità di studiare e validare nuovi protocolli basati su differenti
leggi di moto, introduzione di diverse strategie da adottare per garantire un recupero più efficace.
Numerosi studi in letteratura riportano la definizione di modelli meccanici dell’arto superiore. Si
evidenziano differenti strutture cinematiche, basate sulla modellazione di braccio e avambraccio
mediante due o più segmenti anatomici, caratterizzati dai relativi parametri meccanici (massa,
momento d’inerzia) e geometrici; i gradi di libertà associati al braccio sono sette ma a seconda
dello studio ne vengono modellati più o meno. I muscoli sono modellati come elementi elastici per
lo scambio di forze, che vengono calcolate a partire da una legge di moto imposta al sistema,
tramite la risoluzione del problema dinamico inverso.
Definizione progetto di tesi e obiettivi
Il presente lavoro di tesi si inserisce nell’ambito di un’attività di ricerca promossa dal NearLab del
Dipartimento di Bioingegneria del Politecnico di Milano, e dall’Istituto di tecnologie industriali e
automazione (ITIA) del Consiglio Nazionale delle Ricerche (CNR) di Milano avente come scopo la
riabilitazione motoria assistita da robot di pazienti affetti da patologie o deficit di origine
neurologica. La piattaforma riabilitativa si basa sull’azione del robot Mitsubishi Pa-10 che assiste il
movimento del paziente, vincolato al robot stesso per mezzo di un’ortesi che impedisce i
movimenti del polso. Le soluzioni end effector based soffrono dell’impossibilità di garantire un
controllo, una previsione e un monitoraggio del comportamento cinematico e meccanico del
braccio del paziente. Una piattaforma end effector based è infatti in grado di agire solo sul
controllo del robot, cui il paziente è vincolato per mezzo dell’end effector. Inoltre, le peculiarità
cinematiche e dinamiche del sistema end effector – ortesi – paziente tipico di questa piattaforma
riabilitativa necessitano di uno strumento che sia in grado di valutare accuratamente i parametri
4
cinematici e dinamici relativi al braccio del paziente. L’integrazione di queste informazioni
all’interno del controllore del robot dovrà consentire quindi di adeguare la cinematica del
movimento a quella del braccio del paziente, di sostenere l’arto superiore contro la gravità, a
fornire stime di parametri d’interesse per garantire task motori efficaci o che ottimizzino un
determinato criterio riabilitativo. Tutte queste necessità hanno condotto allo sviluppo di un
modello meccanico neuromuscolare che consenta di simulare il comportamento dell’arto
superiore umano, e che possa essere integrato nel controllore del robot.
Gli obiettivi del lavoro sono quindi la definizione, l’implementazione e la validazione di un modello
neuromuscolare dell’arto superiore in grado di essere integrato nel controllore real-time di una
piattaforma robotica per riabilitazione.
L’integrazione del nel controllore avverrà in fase successiva al lavoro di tesi; allo stato attuale il
modello è in grado di eseguire un’analisi offline sulla base di traiettorie preimpostate o acquisite
tramite sistema ottico a marker passivi.
Modello Biomeccanico
E’ stata inizialmente definita una catena cinematica seriale rappresentativa dell’arto superiore,
costituita secondo le convenzioni di Denavit-Hartenberg: due aste che rappresentano braccio e
avambraccio sono movimentate da 5 giunti, la cui composizione simula i gradi di libertà associati
alla spalla (abduzione/adduzione, flesso estensione del braccio, rotazione interna ed esterna) e al
gomito (flesso estensione dell’avambraccio e prono supinazione). Il polso corrisponde all’estremità
distale dell’avambraccio, e rappresenta l’end effector dell’arto superiore.
L’arto superiore così modellato si adatta ai parametri antropometrici del paziente da riabilitare,
secondo tabelle antropometriche. Sono stati fissati dei limiti per il valore degli angoli ai giunti, e
sono descritti i calcoli per la computazione della cinematica del sistema, diretta e inversa.
Si è inoltre osservato che l’adozione di un modello a cinque gradi di libertà comporta dei limiti
nell’esplorazione del workspace. Non è possibile garantire per mezzo del controllo di 5 variabili pari al numero dei giunti - un orientamento e una posizione dell’end effector (6 variabili in totale)
del modello, assegnate come dato alla cinematica inversa. Si è scelto di privilegiare la posizione del
polso ideando un algoritmo che valuti l’orientamento dell’end effector, e lo renda compatibile con
la struttura della catena cinematica. Si è osservato che tale correzione è sempre rappresentata da
una rotazione attorno all’asse ortogonale a braccio e avambraccio.
5
Una volta integrato nel controllore del robot, il modello terrà traccia di tale asse impedendo che
vengano imposte coppie attorno ad esso. Tale movimentazione sarebbe infatti lesiva dell’integrità
del braccio del paziente, a meno di ammettere la traslazione della spalla, non prevista dal modello.
Nell’ipotesi che il paziente non sia in grado di vincere autonomamente la forze di gravità, per ogni
configurazione dell’arto superiore il modello è in grado di calcolare l’entità delle forze e coppie che
è necessario imporre attraverso il robot per sostenere il braccio. Il punto di applicazione di tali
reazioni è il baricentro dell’ortesi. E’ stata quindi analizzata una struttura biomeccanica che tiene
conto della labilità del gomito, e dei vincoli imposti dal sistema, tra cui la direzione di applicazione
della coppia di sostegno: essa non può avere componenti né attorno all’asse critico per le
considerazioni cinematiche fatte prima, né attorno all’asse di prono supinazione dell’avambraccio.
Il controllore del robot potrà fornire in real time i valori necessari al sostegno del braccio,
consentendo al paziente di concentrare il proprio sforzo solo sull’esecuzione del task riabilitativo.
Gli attuatori che movimentano il sistema sono i muscoli, elementi elastici monodimensionali in
grado di scambiare forze lungo la direzione identificata dalle loro inserzioni ricavate da database.
Alcune inserzioni sono state rimappate per tenere conto della geometria delle articolazioni, per
mezzo di una puleggia applicata sul centro dell’articolazione, che ruotando trascina l’inserzione del
muscolo. I muscoli inseriti nel sistema sono: bicipite, tricipite, brachioradiale, pronatore, gran
dorsale, pettorale, trapezio, deltoide anteriore e deltoide posteriore.
Sono stati definiti parametri quali lunghezza e velocità di accorciamento di ciascun muscolo, e
sono stati modellati differentemente i giunti al gomito e alla spalla. I due giunti del gomito sono
movimentati da due attuatori ciascuno, e le rotazioni avvengono attorno ad un solo asse.
Geometricamente agiscono pertanto su un unico piano, in serie l’uno all’altro. La spalla invece è
un’articolazione che costituisce un giunto sferico a meccanica ridondante parallela. Per entrambe
le tipologie di articolazione si sono definiti operatori matematici in grado di descrivere il legame
tra grandezze cinematiche e dinamiche.
Vista la natura del deficit del paziente, è d’interesse la stima delle forze attuate dai muscoli dovute
ad azione volontaria. Tale stima avviene per mezzo della relazione cinetostatica, che consente di
legare le forze agenti all’end effector alle coppie su giunti. Le forze volontarie scambiate all’end
effector possono essere stimate per differenza: un sensore di forza misura la somma di tutte le
azioni scambiate, a cui vengono sottratte le stime fatte dal modello delle forze d’inerzia e delle
6
forze dovute al sostegno gravitario. Il restante contributo è appunto dovuto alle forze volontarie
generate dal paziente.
E’ stato quindi individuato un operatore matriciale (Jm) capace di stabilire il legame tra le coppie ai
giunti e le forze sui muscoli. Tale operatore necessita però di essere “pesato” da matrice di
attivazione muscolare, che rende conto di quali muscoli stiano lavorando in quel momento.
Il modello implementa anche un modello muscolare, sulla base di relazioni forza-lunghezza e
forza-velocità dei muscoli. Si estraggono quindi i valori di forza attiva, forza passiva e una stima del
segnale di attivazione neurale normalizzato tra 0 e 1, indicativo del “grado di attivazione” del
muscolo.
Il modello consente inoltre di estrarre parametri quali la potenza e il lavoro espressi ai giunti o dai
muscoli.
Validazione del modello
La procedura sperimentale di validazione del modello è divisa in tre parti. Le stime di sostegno
gravitario fatte dal modello sono confrontate con i valori ottenuti, per la medesima
configurazione, dai sensori di forza.
La validazione dei risultati di forza muscolare è valutata su quattro muscoli: bicipite, tricipite,
deltoide posteriore e deltoide anteriore, sui quali è stato rilevato il segnale elettromiografico,
confrontandolo con le predizioni del modello.
Si è infine proposto un confronto dei valori di forza attiva e passiva individuati sul muscolo
deltoide anteriore a seguito della variazione della legge di moto.
Conclusioni
Le prime prove sperimentali hanno avuto esiti soddisfacenti; si intende ora implementare il
modello all’interno del controllore del robot e testarne il funzionamento in real time. Il processo di
validazione può essere più accurato mediante l’esecuzione di prove sperimentali su soggetti
neurologici. I miglioramenti che possono essere apportati riguardano la modellazione delle
cocontrazioni muscolari e l’inserimento di ulteriori muscoli.
7
1.1 – ABSTRACT
State of art: robotic rehabilitation and upper limb biomechanical models
Robotic rehabilitation for neurological subjects is an effective strategy for an at least partial
recovery of the lost functions. There are two main rehabilitative approaches: the first one, which is
called end effector-based, consists in the patient handling the end effector of the robot, that
assists the motor task. The second approach uses esoskeletons instead. Robotic rehabilitation
features many cons: repetibility, autonomy during task execution, chance of studying and
validating new protocols based on new motion laws, introduction of different strategies to grant
faster and better recovery.
Many studies in literature define biomechanical models of the upper limb. Each study features a
different kinematic structure, based on different models of arm and forearm by two or more
anathomical segments, with their mechanical (mass, moment of inertia) and geometrical
parameters; there are seven degrees of freedom associated to the arm, but depending on the
study a different number is modelled. Muscles are modelled as elastic elements for forces
exchange; the forces are computed by solving the inverse dynamic problem.
Thesis definition and objectives
This thesis is part of a project promoted by NearLab del Dipartimento di Bioingegneria del
Politecnico di Milano, and by Istituto di tecnologie industriali e automazione (ITIA) of Consiglio
Nazionale delle Ricerche in Milan. The purpose of the project is robot motor-assisted reabilitation
of patients affected by neurological deseases. The rehabilitative platform involves robot
Mitsubishi Pa-10, that assists patient’s movement. The patient is constrained to the robot, via an
orthesis that prevents the wrist from moving. End effector based solutions lack the capability of
granting full control, prevision, and monitorage of patient’s upper limb kinematical and
mechanical behaviour. An end effector platform can control only the robot, to which the patient is
constrained. Additionally, kinematical and dynamical particuliarities of the system end effector –
orthesis – patiens typical of this platform require a tool that can accurately evaluate patient’s arm
kinematical and dynamical parameters. The integration of these informations into robot controller
will allow to adapt movement kinamatic to patient’s upper limb, to substain the upper limb
8
against gravity, and provide estimation of mechanical parameters to guarantee useful motor tasks
or optimizing a specific criterium. All those needs lead to the development of a mechanical
neuromuscular model that simulates human upper limb behaviour, and that could be integrated
into the robot controller.
The objectives of the work are the definition, implementation and validation of an upper limb
neuromuscolar model to be integrated into the real time controller of a robotic platform for
rehabilitation.
The model will be integrated into the controller after the thesis phase; at the present time, the
model can execute offline analysis based on preset trajectories or acquired via passive marker
optical system.
Biomechanic model
At first, a serial kinematic chain representing the upper limb was built according to DenavitHartenberg conventions: two links standing for arm and forearm are moved by five joints, whose
composition allows to simulate shoulder and elbow degrees of freedom (abduction/adduction,
flexo-estension and internal/external rotation of the arm, amd flexo-estension and
pronosupination of the forearm). The wrist is located at the distal extremity of the forearm, and is
the end effector of the upper limb.
The upper limb adapts to patient’s antropometrical parameters according to antropometrical
tables. Every joint has a determined range of motion and computations for direct and inverse
kinematics are described. A model with 5 degrees of freedom implies limits in exploration of the
workspace. It’s impossible to guarantee an orientation and a position for the end effector (6
variables) by moving only five joints. The choice is to preserve wrist position and to conceive an
algorithm that evaluates the end effector orientation making it consistent with the kinematic
chain structure. The correction is always represented by a rotation around the axe orthogonal to
arm and forearm.
Once integrated into the robot controller, the model will keep track of that axe preventing the
robot from imposing torques around it. That movimentation would be damaging to patient’s arm
integrity, if the shoulder can’t move.
9
With the hipothesys that the patient can’t substain his upper limb against gravity, for each
configuration the model computes forces and torques recquired to substain the arm. Those action
are applied in orthesis barycentre. A mechanical structure has so been analysed, and it takes into
account the elbow lability, and system constrains, like substain torque application axe: it must not
have components along the “critical” kinematical axe (explained above), nor along forearm
pronosupination axe. Real-time robot controller will provide necessary forces and torques to
substain the arm, so that the patient can concentrate only on task execution.
The actuators that move the system are the muscles, modelled as monodimensional elastic
elemnts that can exchange force along the direction identified by their inserctions (from
database). Some inserctions have been re-mapped to take into account the articulation geometry,
by introducing a pulley applied to the centre of the articulation, that while rotating, drags the
inserction. Modelled muscles are: biceps, triceps, brachioradialis, pronator, latissimus dorsi,
pectoralis maior, trapezius, antherior delthoid and posterior dethoid.
Parameters like muscle length and shortening velocity were defined, and shoulder and elbow
joints were dirrently modelled. Two wlbow joints are moved by two muscles each, and their
rotations are around one single axe. Geometrically they act on a single plane. The shoulder instead
is a spherical joint having redundant parallel mechanics. For both articulations mathemical
operators describing links among kinematical and dynamics parameters have been defined.
Concerning patients’ deficit, it’s interesting to evaluate muscle forces coming from voluntary
contraction. That estimation is thanks to kinetostatic relation, that links ened effector forces and
torques to joint torques. Voluntary forces acting at end effector level can be estimated by
difference: a force sensor measures the sum of all acting forces, to whom are subtracted model
estimation about inertial forces and forces to substain against gravity. The rest is due to voluntary
muscle activation.
Matricial operator Jm was defined; it links joint torques to muscle forces. That operator needs to
be “weighted” by a muscolar activation matrix, that brings information about which muscles are
really working.
10
The model implements also a muscolar model, based on force-length, and force velocity relations.
Active and passive muscle forces are computed togheter with an estimaton of the neural
activation signal, normalized between 0 and 1.
The model allows to compute mechanical parameters such as joint or muscles power and work.
Model validation
The experimental procedure of validation is divided into three parts. Estimation of substain forces
against gravity made by the model is related to obtained values, for the same configuration, on
force sensors.
Validation of muscle forces is evaluated over four muscles: biceps, triceps, antherior deltoid and
posterior delthoid, on whom the emg signal was recorded and compared with model predictions.
At last, a comparison between active and passive force and antherior delthoid muscle has been
proposed, considering three different motion laws.
Conclusions
First experimental evidences had satisfiying outcomes; now the model has to be implemented into
robot controlled to test its real-time work. The validation process should be improved by testing
the model on neurological subjects. Improvements can be implemented by modelling muscle
cocontraction and by increasing the number of muscles into the model.
11
2 - STATO DELL’ARTE
2.1 - RIABILITAZIONE ROBOTICA
L’utilizzo di dispositivi robotici costituisce una tecnica di rilevante e crescente importanza in
ambito riabilitativo. Infatti, il numero di pubblicazioni scientifiche citate da un recente studio
(Crespo e Reikensmeyer, 2009) che si occupa di determinare lo stato dell’arte di tale settore è
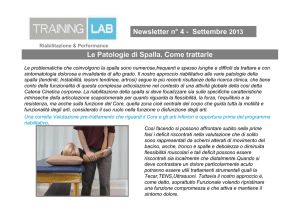
cresciuto in maniera rilevante negli ultimi venti anni come mostrato dal grafico in figura 1.
Figura 1: numero di articoli inerenti la riabilitazione dell’arto superiore tramite dispositivi robotici
in funzione dell’anno di pubblicazione (Crespo e Reikensmeyer, 2009).
Tale crescente interesse per il settore robotico applicato alla riabilitazione di pazienti neurologici
ha condotto, nel corso degli ultimi due decenni, all’introduzione di numerose soluzioni, in termini
di
utilizzo
e
di
filosofia
riabilitativa
e
di
controllo.
Nell’anno 1998, viene commercializzato il prototipo MIT-Manus. Si tratta di un robot dedicato alla
riabilitazione dell’arto superiore, che sfrutta un sistema di controllo e assistenza al paziente legata
alla posizione all’interno dello spazio di lavoro. Un dispositivo analogo, ma focalizzato sul ripristino
12
di funzioni di deambulazione e disponibile già da alcuni anni, è il Lokomat. Entrambi i robot hanno
in seguito beneficiato dell’introduzione di nuove strategie riabilitative, modificando l’esecuzione
della legge di moto sulla base di feedback quali le forze che il paziente è in grado di produrre.
Figura 2: i robot MIT-Manus e Lokomat.
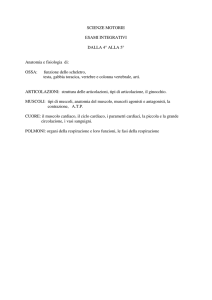
Robot più recenti, come WREX (Figura 3), supportano il paziente grazie ad un sistema di sostegno
della gravità, la cui entità è misurata per mezzo di appositi sensori. L’evoluzione di tale dispositivo,
Pneu-WREX, è in grado di creare un modello real time dei deficit del paziente, intervenendo in
aiuto al movimento solo quando necessario.
Figura 3: i robot WREX e Pneu-WREX.
Una possibile classificazione per le piattaforme robotiche suddivide l’approccio riabilitativo
secondo due filosofie: riabilitazione end effector based o attraverso esoscheletro. I robot
appartenenti alla prima categoria sono generalmente catene cinematiche seriali la cui parte
terminale – l’end effector – consente al paziente di ancorarsi, ad esempio attraverso una
13
manopola, per seguire il robot o movimentarlo durante l’esecuzione di un task motorio. Tale
approccio consente di adattare facilmente l’utilizzo del robot al paziente, ma al tempo stesso
occorre un’attenta pianificazione delle leggi di moto per non compromettere l’integrità del braccio
del paziente (Bircher, Conferencia Istituto Valenciano de Rehabilitation, 2008).
Un esempio di riabilitazione tramite robot end effector based è costituito dal robot “Braccio di
ferro”, utilizzato per il recupero delle funzioni dell’arto superiore su pazienti colpiti da ictus
(Vergaro et al, 2010). Il paziente movimenta il robot, che lo assiste e supporta solo in caso di
fallimento nell’esecuzione del task.
Figura 4: il robot “Braccio di Ferro” (Vergaro et al, 2010).
Un secondo approccio riabilitativo si basa sul supporto del braccio del paziente tramite
esoscheletro. La cinematica del robot risulta “corrispondente” a quella del paziente dato che
l’esoscheletro segue solidalmente il movimento che esso esegue. Il movimento del paziente risulta
quindi più controllabile ma al tempo stesso la riproduzione dei gradi di libertà associati alla spalla
assume una rilevante complessità (Bircher, Conferencia Istituto Valenciano de Rehabilitation,
2008).
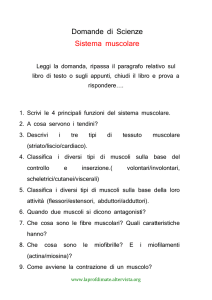
Due esempi di esoscheletro sono ARmin (Neff et al., 2009), e Armeo Spring (sviluppato da
Hocoma, i cui primi studi pilota sono stati curati da Gijbels et al, 2011), mostrati in figura 5.
14
Figura 5: gli esoscheletri ARmin e Armeo.
La riabilitazione attraverso robot consente di eseguire movimenti precisi e ripetibili, e permette di
valutare il recupero e il miglioramento nell’esecuzione del task motorio e dell’attivazione
muscolare durante il processo riabilitativo.
A tal fine in diversi studi viene effettuata una registrazione del movimento del paziente
pretrattamento tramite sistemi ottici. Lo scopo è analizzare il deficit del paziente stesso e definire
una terapia riabilitativa personalizzata e dipendente dalla reali necessità.
La ripetizione del medesimo gesto porta al miglioramento nel recupero della funzione (Kwakkel,
2007), purché l’utilizzo della tecnica robotica sia frequente e prolungato. L’utilizzo del robot
consente di mantenere alte intensità di trattamento, e di monitorare o cambiare i trials riabilitativi
a distanza, favorendo l’indipendenza del paziente.
Il monitoraggio dello stato di recupero è fondamentale per poi valutare l’implementazione di
specifici protocolli riabilitativi. Il robot consente infatti l’utilizzo di svariati protocolli e un controllo
continuo
dei
parametri
fisiologici
d’interesse
e
dell’intensità
di
allenamento.
L’implementazione di diversi e opportuni algoritmi di controllo permette di seguire terapie
riabilitative secondo diverse modalità, tra cui movimento passivo continuo, movimento attivo
assistito, movimento attivo offrendo resistenza (Kwakkel, 2007) per poter variare il pattern
d’allenamento in base alle esigenze del paziente.
L’implementazione di una traiettoria desiderata riveste quindi fondamentale importanza qualora il
robot sia destinato all’assistenza del paziente durante il movimento riabilitativo. In particolare si
15
evidenzia la necessità di poter dare al paziente una traiettoria che ricalchi nei parametri cinematici
i “normali” movimenti dell’arto superiore, in modo da rendere la fase riabilitativa vicina alla
quotidianità dei movimenti. In letteratura si evidenziano due metodi fondamentali per giungere
alla formulazione di una traiettoria da implementare al robot: si sfruttano modelli biomeccanici
che minimizzano determinate cifre di merito (come il jerk), oppure si implementano traiettorie
preregistrate acquisite su pazienti (Huang e Krakauer, 2009).
L’analisi della traiettoria eseguita dal paziente, quindi delle posizioni e delle leggi di moto,
risultano passi fondamentali a seguito di una fase di acquisizione. Oltre alla ripetibilità e
“naturalezza” della traiettoria effettivamente implementata al robot non va trascurato un aspetto
di comfort essenziale per il paziente, che dipende dalla legge di moto. Gli studi osservati in
letteratura riportano come la percorrenza di una traiettoria di movimento risulti più confortevole
tanto minore risulta il jerk, come riportato da Flash e Hogan, 1985. Il concetto di smoothness
pertanto indica la “dolcezza” del movimento e si correla significativamente a quanto confortevole
risulta essere il movimento eseguito dal paziente. Risulta spesso necessario scalare il profilo di
velocità di esecuzione del task motorio, preservandone la forma ma diminuendone la velocità, per
ottenere una traiettoria più confortevole e attenersi ai limiti imposti dal robot.
Studi su pazienti affetti da ictus (stroke) e problemi di carattere neurologico a seguito di eventi
traumatici hanno evidenziato la necessità di garantire procedure di riabilitazione dotate di alcune
caratteristiche fondamentali. Tra di esse, si evidenzia l’efficacia dell’esecuzione ripetitiva e
ripetibile alcuni task motori, strategia riabilitativa che può consentire il progressivo recupero di
specifiche funzioni motorie, e il mantenimento di un tono muscolare minimo. E’ ormai pratica
clinica diffusa l’utilizzo della stimolazione elettrica funzionale, che agisce attivando le placche
motrici, siti di giunzione neuromuscolare, in cui le terminazioni nervose inducono la contrazione
del muscolo. Si tratta di una tecnica che consente di eseguire dei movimenti o di esserne d’ausilio,
a
seconda
della
gravità
del
danno.
E’ importante inoltre che un paziente possa eseguire il compito assegnatogli con continuità e
senza dipendere dalla presenza fisica di assistenza. Sotto quest’ottica assume particolare rilevanza
l’utilizzo di piattaforme robotiche per la riabilitazione. A partire dall’inizio degli anni ’90, tali device
hanno trovato largo impiego, e si sono diffusi esponenzialmente: consentono di preimpostare task
motori specifici, attivandosi quando necessario, garantendo perfetta ripetibilità e differenti
modalità di utilizzo (ad esempio, offrendo una diversa resistenza al movimento).
16
2.2 - MODELLI MUSCOLO SCHELETRICI DELL’ARTO SUPERIORE
E’ stata eseguita una ricerca bibliografica preliminare allo scopo d’indirizzare alcune scelte di
sviluppo e osservare quali soluzioni siano state adottate fino ad ora. I modelli biomeccanici relativi
al braccio sono numerosi e, a seconda dell’applicazione a cui sono destinati, sono in grado di
simulare la biomeccanica dell’arto superiore con diversi gradi di complessità e precisione, nonché
di costo computazionale. A soluzioni “semplici”, che identificano le strutture ossee con due
segmenti anatomici monodimensionali, e che simulano l’azione di pochi attuatori muscolari, si
affiancano anche modelli come quello sviluppato da Pennestrì et al (2007), che riproduce l’azione
di 24 muscoli e la presenza di sette gradi di libertà. Quest’ultimo articolo si è rivelato utile per
estrapolare alcuni dati come i punti d’inserzione degli elementi che riproducono l’azione
muscolare.
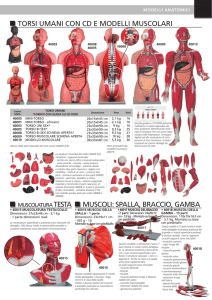
La cinematica dell’arto superiore è descritta da sette gradi di libertà, che riproducono i movimenti
consentiti da spalla, gomito e polso.
Figura 6: i gradi di libertà relativi all’arto superiore.
Altri studi, focalizzandosi su specifiche applicazioni, si servono invece di una modellazione a 5 gradi
di libertà, trascurando i due relativi al movimento del polso (Abdullah, 2007, e Chadwick et al,
2009). Per lo studio della cinematica, alcuni studi (Abdullah, 2007) sfruttano la teoria delle catene
17
cinematiche seriali robotiche (come nel presente lavoro). La finalità dei modelli consiste
generalmente nel calcolo delle forze agenti sulle strutture che modellano i muscoli, noto a priori
un task motorio, per mezzo della risoluzione del sistema dinamico inverso. Esso viene risolto
secondo l’applicazione delle equazioni di Eulero-Newton (Abdullah) o tramite l’utilizzo di funzioni
Lagrangiane (Pinnestrì). Per la definizione di parametri antropometrici di riferimento per il modello
esistono dei database che raccolgono grandezze come masse e momenti d’inerzia dei segmenti
anatomici dell’arto superiore (Winter, 1992) o parametri per la valutazione della forza contrattile
muscolare (Yamaguchi, 2001).
Per la definizione dei parametri antropometrici del modello cinematico sono stati presi come
riferimento gli studi di Drillis e Contini (1994) e Winter (1992). Tali parametri definiscono secondo
precisi rapporti la lunghezza dei segmenti anatomici di braccio e avambraccio e sulla loro massa. I
valori riportati seguono la tabulazione antropometrica riportata nelle figure 5 e 6.
Figura 7: tabella antropometrica di riferimento per la lunghezza dei segmenti anatomici di braccio
e avambraccio (Drillis e Contini, 1994).
Tabella 1: tabella antropometrica di riferimento per la massa e locazione del centro di massa dei
segmenti anatomici di braccio e avambraccio (1992).
18
I modelli muscolari di riferimento sono sviluppati da Zajak (1989) e Rasmussen (2005) e consistono
di funzioni sperimentali che accorpano gli studi di Hill. Per una dettagliata analisi dello stato
dell’arte della modellazione muscolare si rimanda al capitolo: si è ritenuto più efficace illustrarle in
considerazione
della
modellazione
muscolare
introdotta
nel
presente
lavoro.
I modelli meccanici trovano applicazione in diversi ambiti: valutazione delle forze impresse sul
volante durante la guida (Yongchul et al., 2003), stima dei danni dovuti ad un incidente stradale
(Pinnestrì et al., 2006), definizione di ipotesi di deficit muscolari su pazienti neurologici (Hingtgen,
2006), per monitorare e assistere task di riabilitazione robotica (Abdullah, 2007).
19
3 - OBIETTIVO TESI
Il presente lavoro di tesi si integra all’interno di un progetto di ricerca in fase di svolgimento presso
l’Istituto di tecnologie industriali e automazione (ITIA) del Centro Nazionale delle Ricerche, in
collborazione con NearLab del Dipartimento di Bioingegneria del Politecnico di Milano. Il progetto
prevede l’uso di un sistema robotico come piattaforma sperimentale per la riabilitazione dell’arto
superiore. Il robot Mitsubishi PA-10 in dotazione all’ITIA presso il CNR di Milano è infatti destinato
all’esecuzione di task motori per la riabilitazione di pazienti neurologici. La volontà di realizzare
una piattaforma riabilitativa robotica end effector based rende particolarmente utile lo sviluppo di
un modello muscolo-scheletrico dell’arto superiore che consenta di fornire una stima di alcune
grandezze utili per la previsione e la scelta dei task motori che possano garantire il più efficace
recupero della funzione motoria del paziente, e al tempo stesso di garantire un maggior controllo
sulla cinematica del movimento del paziente. Il modello verrà utilizzato in sinergia con l’azione
della piattaforma robotica, in modo da evidenziare quali vincoli debbano essere imposti al
movimento durante la fase di utilizzo dell’intero set-up riabilitativo. Il modello sviluppato dovrà
infatti essere inserito all’interno del controllore del robot per lo sviluppo di logiche di controllo
model-based. A tale riguardo il modello sviluppato ha la necessità di presentare caratteristiche
computazionali elevate (basso tempo di calcolo) per poterlo inserire nel ciclo di controllo real-time
del
controllore.
Il modello è inoltre in grado di assolvere le seguenti funzioni:
-
Garantire il posizionamento del braccio in configurazioni non pericolose per la sua
integrità.
-
Fornire sostegno antigravitario al paziente, calcolando in real time per ogni posizione che il
robot raggiunge nello spazio di lavoro le azioni (forze e coppie) che il robot deve erogare
per sostenere integralmente il peso del braccio contro il gradiente gravitario.
-
Fornire una stima delle coppie e delle potenze espresse ai giunti.
-
Risalire ad una stima delle forze di contrazione volontaria agenti sui muscoli, per mezzo
delle forze misurate dal sensore montato sull’end effector del robot e del calcolo delle
forze d’inerzia che caratterizzano la dinamica del sistema.
20
-
Applicare le equazioni di un modello muscolare per discriminare il contributo di forza attiva
e passiva agente sul muscolo e stimare un parametro indicativo dell’attivazione neurale.
-
Valutare quantitativamente, tramite opportuni criteri, il grado di disabilità del paziente, e
stabilire dei criteri riabilitativi scegliendo traiettorie per task motori che rendano ottima
una specifica cifra di merito.
21
4 - SET UP RIABILITATIVO
Si descrive in questo paragrafo il set up riabilitativo, che costituisce anche l’apparato sperientale
per la validazione del modello. Questo capitolo è stato anteposto al capitolo di validazione finale
poiché durante la descrizione del modello meccanico si farà riferimento ad alcune peculiarità del
sistema.
L’apparato sperimenatle consiste nel robot Mitsubishi Pa-10, vincolato al terreno, come supporto
per l’esecuzione di task motori. Sull’end effector del robot è montato un sensore di forza, che
rileva le forze e le coppie applicate alla manopola alla quale il paziente è ancorato.
Il sensore di forza è un Mini45-E Transducer prodotto da ATI Industrial Automation.
Figura 8: sensore di forza Mini45-E Transducer di ATI.
A seconda della calibrazione, il sensore ha una sensibilità che varia da ¼ N a 1/16 N per le forze e
da 1/188 Nm a 1/1504 Nm per le coppie. Tuttavia il rumore del sensore oscilla in un range
compreso tra +1,5 N a -1.5 N per le forze e + 0.15 Nm e -0.15 Nm per le coppie.
Movimenti acquisiti tramite sistema a marker passivi direttamente sui pazienti o soggetti sani, o
traiettorie predefinite, possono essere impostate sul robot e eseguite dal paziente, in diverse
modalità d’utilizzo. Il paziente si aggrappa alla manopola che funge da end effector; in ottica di
utilizzo finale, verrà supportato da un’ortesi che lo vincola all’end effector del robot limitandone le
capacità di movimento, e che al tempo stesso lo sostiene contro la gravità. L’ortesi attualmente
utilizzata non è quella che verrà utilizzata in seguito ma assolve la medesima funzione. Le
peculiarità del sistema meccanico costituito da robot e paziente giustificano la necessità di
22
sviluppare un modello biomeccanico dell’arto superiore che si adatti alle necessità dettate dalla
piattaforma riabilitativa.
Assegnati i parametri cinematici di un task motorio e i dati antropometrici del paziente che ha
eseguito il protocollo di riabilitazione, il modello è attualmente in grado di eseguire un’analisi
offline dei dati valutando le forze necessarie al sostegno gravitario; al tempo stesso, i sensori di
forza montati sull’end effector valutano i contributi di forza gravitaria, di attivazione muscolare
volontaria e d’inerzia e consentono, tramite la relazione cinetostatica (vedi capitolo), di risalire al
calcolo dei parametri meccanici d’interesse. Il modello meccanico è tuttavia progettato per agire
in sinergia con l’intera piattaforma. Una volta inserito nel controllore del robot, il modello dovrà
dettare in real-time i parametri necessari al robot per accompagnare il movimento evitando
configurazioni pericolose per l’integrità del braccio del paziente, e sorreggendolo nel contempo
contro il gradiente gravitario.
Il robot Mitsubishi Pa-10 è una catena cinematica seriale a sette giunti, che riproduce i gradi di
libertà di un braccio umano. E’ montato su un supporto che poggia a terra, e ha il terzo grado di
libertà bloccato. I restanti sei gradi di libertà muovono una monopola cilindrica che funge da end
effector alla quale è vincolato il paziente, o per presa semplice o per mezzo di un supporto che
blocca i due gradi di libertà del polso, consentendo di flettere l’avambraccio e pronosupinare. Il
supporto costituisce un’ortesi (figura 11) che si intende utilizzare, in una versione aggiornata,
anche per la riabilitazione. Per la validazione del modello è stato realizzato un dispositivo che
consente di riprodurre le condizioni finali di utilizzo del robot. La cinematica diretta e inversa, il
controllore e l’azionamento del robot sono gestiti da routine preesistenti e azionate dall’ingegnere
che se ne occupa. Il presente lavoro di tesi si è concentrato solo sull’analisi del braccio umano
vincolato al robot per riabilitazione, che è già funzionante.
23
Figura 9: Rappresentazione del robot Mitsubishi Pa-10 e relativi giunti.
24
Figura 10: Apparato sperimentale: il robot è vincolato al terreno tramite un supporto.
Figura 11: l’ortesi che sostiene il braccio.
25
5 - MODELLO BIOMECCANICO
5.1 -MODELLO CINEMATICO
5.1.1 - SCELTE PROGETTUALI
Il modello cinematico del braccio, rappresentativo dei movimenti ad esso associati, svincolato dal
considerare l’azione di momenti e forze, è stato implementato sulla base di alcune soluzioni
osservate in letteratura. Si ricorda che in ottica di utilizzo della piattaforma riabilitativa, il soggetto
sarà vincolato all’end effector per mezzo di un’ortesi che non gli consente di eseguire le due
rotazioni associate al polso, ma che invece permette al paziente di prono supinare l’avambraccio. Il
modello non include quindi la modellazione di tali movimenti del polso.
Il modello si compone di due aste rigide; la prima corrisponde all’omero, alla cui origine si trova la
spalla, e in corrispondenza dell’estremità distale il gomito, mentre la seconda accorpa radio e ulna.
La locazione del polso corrisponde invece all’estremità distale del segmento che rappresenta
l’avambraccio. Sebbene i movimenti del polso non siano riprodotti, è necessario darne una
localizzazione per la risoluzione della cinematica.
Figura 12: la catena cinematica.
26
La scelta progettuale è quindi di limitare la simulazione dei movimenti eseguiti dal braccio a
cinque gradi di libertà possibili, la cui combinazione consente di riprodurre i movimenti associati
alla catena cinematica.
L’articolazione alla spalla, detta cingolo scapolare, unisce il tronco al braccio. L’articolazione
comprende tre ossa: omero, scapola e clavicola. Sebbene la spalla consenta movimenti traslatori
(anteposizione, retro posizione, elevazione ed abbassamento), nel modello essa è considerata fissa
rispetto alle traslazione. Tale approssimazione risulta buona per un’elevazione della spalla non
superiore ai 90 gradi (si richiede anche, laddove possibile, che il paziente collabori impegnandosi a
non muovere la spalla), e compatibile con lo spazio di lavoro del movimento di reaching, alla cui
analisi il modello è inizialmente dedicato.
La spalla consente invece tre gradi di libertà rotazionali:
1) attorno all’asse ortogonale al terreno e passante per la spalla (q1);
2) attorno all’asse parallelo al terreno passante per la spalla, - il cui orientamento dipende da
q1 - (q2)
3) la rotazione interna ed esterna del braccio attorno al proprio asse (q3).
Una combinazione delle tre rotazioni consente di ottenere anche i movimenti di abduzione e
adduzione non schematizzati direttamente nel modello.
I due restanti gradi di libertà, anch’essi rotazionali, sono associati al gomito e riproducono:
4) la flesso – estensione dell’avambraccio (q4),
5) il movimento di prono supinazione (q5) sempre ad esso relativo.
In figura vengono mostrati i movimenti schematizzati dal modello cinematico, implementati grazie
all’utilizzo del Robot Toolbox in dotazione a MATLAB.
Secondo la teoria relativa alle catene cinematiche seriali, è possibile identificare univocamente il
modello sviluppato tramite un ridotto numero di parametri grazie alla convenzione di Denavit –
Hartenberg, in grado di definire le trasformazioni geometriche che legano la terna di riferimento
relativa a ciascun giunto a quella successiva. Tale convenzione consente di esprimere la struttura
della catena cinematica tramite quattro parametri per ogni giunto. Esistono due possibili
convenzioni, che si differenziano per la localizzazione dei riferimenti. La catena cinematica che
27
costituisce il modello risulta qui identificata dai parametri di Denavit – Hartenberg, in versione
“modificata”, tabulati di seguito. Nel prossimo paragrafo che illustra la procedura che consente di
identificarli.
Tabella 2: parametri di Denavit – Hartemberg (modificati) relativi alla catena cinematica del
modello. Gli angoli sono espressi in radianti.
Giunto
α
D
A
q
1
π/2
0
0
q1
2
-π/2
0
0
q2
3
π/2
Lunghezza braccio
0
q3
4
-π/2
0
0
q4
5
π/2
Lunghezza avambraccio
0
q5
Figura 13: la catena cinematica prodotta dai parametri di Denavit-Hartenberg indicati nel sistema
di riferimento globale.
28
5.1.2 - DESCRIZIONE DELLA CONVENZIONE DI DENAVIT-HARTENBERG
Sia dato un robot costituito da una catena cinematica seriale. Si numerino in ordine crescente i
giunti e i link, partendo dalla base per giungere all’end effector. In corrispondenza di ciascun
giunto e della base del robot, si pone l’asse di rotazione corrispondente; quest’ultimo asse
rappresenta l’asse z di ciascuna delle terne solidali al giunto. Tra ciascun asse z del riferimento e
quello successivo si individua la retta minima distanza. Le operazioni sopracitate sono illustrate in
figura 14.
Figura 14: la procedura di individuazione degli assi di giunto e della retta a minima distanza, per
due giunti consecutivi.
Si pone ora l’origine di ciascuna terna in corrispondenza dell’intersezione tra la retta di minima
distanza tra l’asse i e l’asse i+1 e l’asse i. L’asse x della terna i-esima è orientato lungo tale retta e
l’asse y si ottiene formando una terna destrorsa con gli assi x e z già individuati. La collocazione
completa delle terne di giunto è illustrata in figura 15.
29
Figura 15: Collocazione delle terne di giunto sui giunti i e i+1.
Identificate le terne di giunto, ci proponiamo di individuare la matrice di rototraslazione che lega
ciascuna terna alla successiva. La convenzione di Denavit – Hartenberg consente di costruire tale
matrice, giunto per giunto, utilizzando quattro parametri, rappresentativi di due rotazioni e due
traslazioni.
Si vuole dunque descrivere la matrice di rototraslazione che descrive la relazione tra le terne i+1 e
i. Il primo step consiste nel trasportare l’origine del sistema i+1 nel punto Ai, come mostrato in
figura 16. Il punto Ai è ottenuto come intersezione tra l’asse i+1 e la retta di minima distanza i.
30
Figura 16: determinazione dei primi due parametri di Denavit-Hartenberg.
Per traslare l’origine della terna i+1 nel punto Ai, occorre muoversi di una quantità di+1 lungo l’asse
z di giunto. Affinché l’orientamento dell’asse xi+1 della terna i+1 traslata sia il medesimo dettato
dalla retta di minima distanza i, occorre ruotare la terna attorno all’asse zi+1 di un angolo qi+1, che è
anche il valore del grado di libertà del relativo giunto.
Si deve ora traslare l’asse z della terna i+1 in modo che coincida con l’asse z della terna i. Per fare
questo, occorre muoversi lungo la retta di minima distanza che congiunge i due assi di una
quantità ai+1, come illustrato in figura 17.
31
Figura 17: determinazione degli ultimi due parametri di Denavit – Hartenberg.
L’ultimo passaggio consiste nel ruotare la terna i+1 di un angolo αi+1 attorno all’asse di minima
distanza affinché le due terne si sovrappongano.
Si sono identificati quindi i parametri di+1, qi+1, ai+1, α i+1, relativi alla trasformazione dalla terna i alla
terna i+1. La matrice di trasformazione da una terna a quella successiva è la seguente, e può
essere costruita semplicemente sostituendo i valori dei parametri di Denavit – Hartenberg relativi
alle terne in esame (si sottintendono gli indici i+1):
Tii+1=
[cos(q)
-sin(q)
0
a
sin(q)*cos(α) cos(q)*cos(α)
-sin(α) -sin(α)*d
sin(q)*sin(α)
cos(α)
0
cos(q)*sin (α)
0
0
32
cos(α)*d
1]
5.1.3 - CINEMATICA DIRETTA
Il posizionamento dell’end effector di una catena cinematica occupa una posizione nello spazio
definita del valore che viene imposto ai giunti. Supponendo di voler imporre alla catena
cinematica degli specifici valori di angoli di rotazione ai giunti, il posizionamento nello spazio è
univocamente definito grazie all’utilizzo della matrice omogenea di trasformazione, che tiene
conto sia della traslazione che della rotazione intercorrono tra le terne locali di riferimento
immediatamente
successive,
come
descritto
nel
paragrafo
precedente.
Moltiplicando le matrici relative a ciascuna trasformazione in successione si ottiene la
trasformazione tra la terna e la posizione di riferimento della base e la terna e la posizione in cui si
trova l’end effector.
5.1.4 - VINCOLI CINEMATICI DEI GIUNTI
Le singole articolazioni del braccio superiore sono caratterizzate da un range of motion che non
spazia su tutto l’angolo giro. Sono stati quindi imposti dei vincoli sul valore degli angoli che occorre
siano soddisfatti durante la computazione della cinematica diretta ed inversa del movimento, per
verificare che un determinato movimento sia compatibile con i range of motion della singola
articolazioni.
Si riportano in tabella 3 i range di valori entro i quali può avvenire il movimento, secondo lo studio
di Chadwick et al. (2009), preso come riferimento per imporre i vincoli cinematici.
Tabella 3: range of motion relativo ai gradi di libertà, rispetto alla posizione di riposo (illustrata in
seguito). Gli angoli sono espressi in gradi.
Movimento
Angolo minimo Angolo massimo
Rotazione spalla (asse z terna base) – q1 -270°
0°
Rotazione spalla (asse z terna due) – q2
0°
+270°
Rotazione interna/esterna spalla – q3
0°
+180°
Flesso estensione avambraccio – q4
0°
+150°
Prono/supinazione avambraccio – q5
-90°
+90°
33
In figura sono mostrate le convenzioni utilizzate: il modello cinematico si intende in posizione di
riferimento quando il braccio è orientato in avanti (lungo l’asse y, in direzione negativa) e
l’avambraccio è steso, parallelo alla congiungente tra le due spalle, lungo l’asse x. Questa
configurazione corrisponde ai valori dei gradi di libertà, secondo il nostro riferimento, di q(1)=pi/2, q(2)=pi/2, q(3)=pi/2, q(4)=0, q(5)=0, convenzione corrispondente a quella adottata dal Robot
Toolbox a cui viene affidata la visualizzazione della catena cinematica secondo la tabella di
Denavit-Hartenberg.
Figura 18: posizione di riferimento della catena cinematica rispetto alla quale sono calcolati i valori
di giunto. Il braccio destro è steso frontalmente, gomito e polso all’altezza della spalla.
34
Figura 19: il range of motion di q1.
Figura 20: il range of motion di q2.
Figura 21: il range of motion di q3.
35
Figura 22: il range of motion di q4.
Figura 23: il range of motion di q5.
5.1.5 - CINEMATICA INVERSA
Il problema cinematico inverso consiste nel calcolo del valore degli angoli di giunto assegnati una
certa posizione e un orientamento dell’end effector. Si tratta di una problematica tipica, la cui
soluzione è necessaria dato che la traiettoria da seguire in task riabilitativi è generalmente imposta
in forma cartesiana. Posizionamento e orientazione dell’end effector nello spazio cartesiano sono
rappresentate tramite una matrice omogenea di rototraslazione 4x4, che contiene in tutto sei
parametri indipendenti: 3 gradi di libertà di traslazione, 3 di rotazione. La definizione di un
modello a 5 gradi di libertà comporta l’insorgere di problemi per la risoluzione della cinematica
inversa: si tratta infatti di voler garantire la corretta composizione di sei parametri nello spazio,
attraverso il movimento di soli cinque gradi di libertà. Fatta questa premessa, la matrice
36
omogenea relativa all’end effector fornita come dato alla cinematica inversa può portare quindi a
individuare configurazioni non coerenti con le possibili reali capacità di movimento del braccio
permesse dai 5 gradi di libertà modellati.
Individuata questa criticità, si è quindi provveduto ad ideare un algoritmo per valutare la
compatibilità della matrice di rototraslazione all’end effector con i cinque gradi di libertà dell’arto
superiore, l’eventuale “errore” rispetto alle reali configurazioni attenibili dal modello dell’arto ed
eventualmente approssimare la stessa tramite valori che ne permettano l’inversione cinematica.
In figura 25 è mostrato il procedimento di correzione. Come si può osservare in figura, data la
posizione del polso desiderata e imposto un orientamento, si ricava la posizione del gomito
attraverso una traslazione dalla posizione del polso stesso lungo l’asse dell’avambraccio (che
coincide con l’orientamento), di una lunghezza pari alla lunghezza dell’avambraccio stesso.
Figura 25: la posizione del gomito individuata può non essere compatibile con la catena
cinematica; procedura di correzione.
37
Così facendo, la posizione individuata per il gomito potrebbe non essere compatibile con i vincoli
dettati dalla struttura della catena cinematica, a meno che non si ammetta una traslazione della
spalla o del busto. Le specifiche di lavoro non contemplano tale possibilità; si decide di privilegiare
la posizione del polso richiesta e pertanto si procede ad una correzione dell’orientamento.
Il procedimento è mostrato sempre in figura 25. Si vuole in prima istanza determinare il luogo dei
punti sul quale può trovarsi il gomito. Per farlo, si tracciano due sfere: la prima, centrata nella
spalla e avente raggio di lunghezza del braccio, la seconda centrata nel polso e di ampiezza pari
alla lunghezza dell’avambraccio. L’intersezione tra le due sfere è il luogo dei punti in cui il gomito
può trovarsi, assegnata la posizione del polso. Occorre ora determinare un unico punto: si
interseca il luogo dei punti prima individuato con il piano sui cui giacciono la spalla, il gomito “da
correggere”, e il polso stesso, ottenendo così due punti. Tra i due, viene ritenuto corretto quello
avente geodetica inferiore rispetto alla posizione da correggere.
La scelta del piano di intersezione definito precedentemente è significativa: si tratta del piano su
cui giacciono braccio e avambraccio. L’asse ortogonale a tale piano (da qui in poi “nba”, normale al
piano braccio-avambraccio) identifica infatti anche l’asse di rotazione attorno al quale avviene la
correzione dell’orientamento dell’end effector. Questa deduzione riporta alla considerazione con
la quale si era aperto il paragrafo: i cinque gradi di libertà del modello non garantiscono che la
rotazione attorno all’asse di correzione, imposta come dato alla cinematica inversa, sia
compatibile con la struttura della catena cinematica. La rotazione attorno all’asse nba risulta quindi
critica per l’integrità della catena cinematica: imporne una significa richiedere al modello di
disporsi in configurazioni che potrebbe non raggiungere.
In qualsiasi configurazione, il polso può sempre ruotare attorno all’asse di prono supinazione
dell’avambraccio, e attorno all’asse identificato dalla congiungente tra spalla e polso, e attorno a
qualsiasi asse ottenuto tramite combinazione lineare dei due. Si osserva infatti che la direzione
dell’asse nba può essere ottenuta anche come (in riferimento a figura 26):
nba
Queste considerazioni verranno riprese in sede di discussione del controllo del robot.
38
La verifica della correttezza della posa imposta al polso e la sua eventuale correzione numerica
precede sempre il calcolo della cinematica inversa, costruita sulla base delle valutazioni
quantitative fornite dall’algoritmo stesso. Infatti, occorre procedere ad un ultimo passaggio, cioè
la correzione della matrice omogenea imposta come dato alla cinematica inversa, coerentemente
con il nuovo orientamento dell’end effector.
Figura 26: rappresentazione dell’asse di rotazione critico e delle rotazioni concesse all’end effector.
La rotazione correttiva è nota se si conoscono l’asse attorno al quale avviene e l’angolo di cui
ruotare. Indicando con nba l’asse di correzione, con S la spalla, con E il gomito corretto e con F la
posizione del gomito identificata dalla matrice di rototraslazione imposta inizialmente, con W il
polso, con θ l’angolo di rotazione, e con x y e z i coseni direttori dell’asse nba:
39
Si applica ora la formula di Rodrigues, operatore che consente di ruotare la matrice di rotazione
iniziale (estrapolata dalla matrice di rototraslazione fornita come dato della cinematica inversa) di
un angolo
attorno ad un asse definito dai coseni direttori x y z. La parte traslatoria della matrice
di rototraslazione iniziale non è modificata in quanto è preservata la posizione dell’end effector.
Indicando con Ri la matrice di rotazione iniziale e con Rc quella corretta:
5.1.6 - DETERMINAZIONE DEI VALORI AI GIUNTI
La funzione cinematica inversa fornisce i valori degli angoli ai giunti necessari per raggiungere la
configurazione che le viene fornita in termini di posizionamento nello spazio e orientamento
dell’end
effector.
Supponendo di aver già corretto l’orientamento dell’end effector, si illustrano in seguito i passaggi
geometrico-analitici seguiti per la determinazione di tutti e i cinque i valori ai giunti che
consentono di raggiungere la configurazione desiderata.
Per determinare il quarto grado di libertà, si procede considerando i coseni direttori relativi alla
posa di braccio ed avambraccio, normalizzati per le relative lunghezze. Si tratta di informazioni
note, essendo note le coordinate di spalla, polso e gomito. Siano:
S il punto in cui trova la spalla, E il gomito e W il polso; si calcola l’angolo relativo tra braccio e
avambraccio, pari al valore di flesso estensione dell’avambraccio (q4), secondo la formula:
40
Figura 27: In evidenza il quarto grado di libertà.
Per determinare q2, ovvero l’angolo che rappresenta l’elevazione del braccio rispetto alla spalla, si
proietta sul piano x-y (piano assiale) la posizione del braccio. Indicando con E0 la posizione del
gomito da proiettare e con E1 la sua proiezione su tale piano, vale:
Figura 28: L’elevazione del braccio, rappresentativa di q2.
41
Si procede alla determinazione di q1 in modo analogo, valutando questa volta la proiezione del
braccio sul piano y-z (piano sagittale). Sempre indicando con E0 la posizione del gomito da
proiettare e con E1 la sua proiezione, vale:
Figura 29: Il grado di libertà q1.
Per determinare q3, ci si serve di considerazioni geometriche. Tale angolo risulta infatti essere pari
all’angolo descritto tra le due normali relative ai due piani mostrati in figura 30.
42
Figura 30: sono mostrate le due normali che identificano il valore del terzo grado di libertà (q3).
q3=acos(n1 n2)
Per determinare q5, si costruisce la cinematica diretta inizializzando a zero. Le prime due colonne
della matrice risultante forniscono i coseni direttori degli assi x e y dell’ultima terna. Essendo nota
anche la matrice in ingresso alla cinematica inversa, è noto anche l’orientamento dei due
medesimi assi, dovuto all’azione anche di q(5). Quindi:
x=versore x nella matrice in ingresso alla cinematica inversa;
x5=versore x individuato con cinematica diretta e q(5)=0;
q(5)=acos(x*x5)
43
Figura 31: Determinazione del valore di q5.
44
5.2 - CONTROLLO DEL ROBOT
La piattaforma riabilitativa è stata concepita per assolvere alcuni compiti fondamentali. Il
controllore che gestisce il robot verrà pertanto arricchito dall’integrazione del modello meccanico,
che dovrà fornire al robot indicazioni sulla traiettoria eseguita, evitando configurazioni e
movimenti pericolosi per l’integrità del braccio del paziente, e per il sostegno del braccio del
paziente contro la gravità.
Si riprende in questa sede il concetto di asse di correzione. Si tratta dell’asse nab individuato nel
capitolo relativo alla cinematica, attorno al quale avviene la correzione dell’orientamento
dell’avambraccio, dato che il sistema non è in grado di garantire che la rotazione attorno a questo
asse sia compatibile con la struttura cinematica. Durante l’inseguimento di una traiettoria, se il
robot vincolasse le rotazioni lungo quest’asse (che si ricorda essere dinamico e da ricalcolare per
ogni punto della traiettoria, in quanto dipendente dalla configurazione in cui si trova il braccio),
forzerebbe una rotazione che darebbe luogo a movimenti del gomito non necessariamente
compatibili con la catena cinematica, che potrebbero portare alla “rottura” del braccio.
L’algoritmo riesce ad individuare, istante per istante, l’asse di correzione critico per l’integrità del
braccio del paziente, definito dai suoi coseni direttori. Questo dato verrà fornito al robot in modo
che il controllore che lo gestisce provveda ad adeguare la rigidezza torsionale del robot attorno a
tale asse, non vincolando alcun movimento (nessuna coppia applicata dal robot attorno a tale
asse): attorno all’asse nab il robot non imporrà mai rotazioni, ma si limiterà ad accompagnare il
movimento del paziente.
45
5.3 - COMPENSAZIONE DI GRAVITA’
In considerazione dei deficit neuromuscolari dei pazienti, si è scelto di sviluppare un sistema
biomeccanico sotto l’ipotesi che il peso dell’arto superiore del paziente sia integralmente
sostenuto dal robot. Occorre quindi determinare l’entità delle reazioni che esso dovrà produrre
per garantire il galleggiamento antigravitario del braccio. Il sistema che si genera è visualizzato in
figura, con una reazione alla spalla (scomposta nelle sue tre componenti), una al polso, e un
momento di sostegno. Queste ultime due azioni vengono generate direttamente dal robot allo
scopo di garantire il sostegno della struttura articolare contro l’azione della gravità. E’ importante
sottolineare come l’ortesi che sostiene il braccio del paziente faccia sì che le reazioni di sostegno
abbiano come punto di applicazione il baricentro dell’ortesi stessa, e non l’estremità distale
dell’avambraccio. Le reazione erogata dal robot per sostenere il braccio agisce invece
necessariamente a livello dell’end effector; si rende necessario quindi un “trasporto” delle
reazioni, in modo da valutarne correttamente l’entità: individuati i valori di forze e coppie prodotti
in corrispondenza del baricentro dell’ortesi (punto O in figura 32), si applicano le equazioni di
trasporto del momento per ottenere i corrispondenti valori sull’end effector (punto W). Si riporta
il procedimento nel prossimo capoverso.
Si nota inoltre che il braccio produce un momento di caduta gravitaria attorno all’asse ideale che
congiunge spalla e polso, indotto dai pesi di braccio e avambraccio, localizzati nei rispettivi
baricentri. Si osserva quindi un’importante caratteristica del sistema: se l’end effector sostenesse
il braccio applicando un momento uguale e contrario a quello individuato attorno all’asse spalla –
polso, verrebbe indotta anche prono supinazione dell’avambraccio, in quanto i due assi di
rotazione non sono disaccoppiati. Sorge allora la necessità che il robot applichi il momento di
sostegno lungo l’asse disaccoppiato dall’asse nab, di cui si è discusso nel capitolo che riguarda la
cinematica del sistema, e dall’asse dell’avambraccio (che coincide con l’asse di prono supinazione),
come mostrato in figura. Per implementare questa soluzione, si individua l’asse di applicazione
come prodotto vettore tra i due assi prima citati.
46
Figura 32: il sistema biomeccanico relativo al braccio vincolato all’end effector.
Valgono le seguenti tre equazioni che regolano la statica del sistema, in modo da garantirne
l’equilibrio; si sceglie di proiettare sugli assi lungo i quali non agisce la coppia per poter risolvere il
sistema nelle incognite F e R. Si indicano:
con S la spalla, con B il baricentro del braccio, con E il gomito, con A il baricentro dell’avambraccio,
con O il punto in cui è localizzato il punto di applicazione delle reazioni sull’ortesi, con W il polso.
-
Equilibrio dei momenti attorno alla spalla, proiettati sull’asse nab:
-
Equilibrio dei momenti attorno alla spalla, proiettati sull’asse di prono supinazione:
-
Equilibrio dei momenti attorno al gomito, proiettati sull’asse nab:
47
Le tre equazioni sopra mostrate, messe a sistema, consentono di individuare il valore delle
incognite Fx, Fy, Fz (componenti di F), fornisce il valore delle reazioni a livello del baricentro
dell’ortesi. La reazione corrispondente alla spalla si ottiene risolvendo, nell’incognita R, la
seguente:
Si determina infine la coppia di sostegno. Per farlo, occorre innanzitutto mettere in evidenza le
azioni interne a livello del gomito: la forza G e la coppia Cg (figura 15). Esse risultano pari a:
Figura 33: sono mostrate le reazioni interne del gomito.
Si può ora calcolare direttamente C:
48
Occorre però valutare l’entità delle reazioni a livello dell’end effector. La componente di forza
resta la medesima individuata nel baricentro dell’ortesi (F), mentre varia il valore dei momenti.
Applicando l’equazione di trasporto dei momenti scrivo (figura 16):
Figura 34: in evidenza il trasporto del momento dal punto O al punto W.
49
5.4 - MODELLO MUSCOLARE
5.4.1 - SCOPO DELLA MODELLAZIONE MUSCOLARE
Risulta d’interesse fornire una stima del contributo di forza da attribuire a ciascun muscolo a
seguito dell’attivazione volontaria del paziente, durante l’esecuzione di un task motorio, assegnati
i parametri cinematici ad esso relativi. L’applicazione di un modello muscolare rende conto dei
contributi di forza attiva e passiva (si rimanda al capitolo dedicato) esercitati dal muscolo e ottiene
una stima del parametro di attivazione del muscolo, ovvero dell’intensità di attivazione muscolare
indotta dal segnale neuronale. Quest’ultimo obiettivo potrà consentire ad esempio di tarare una
stimolazione funzionale mirata, per mezzo dell’adozione di parametri appropriati.
5.4.2 - GENERALITA’
L’introduzione delle strutture muscolari consente l’analisi dei “motori” determinano l’esecuzione
dei movimenti illustrati nel capitolo sulla cinematica. L’anatomia delle strutture muscolari
interessate dai movimenti del braccio è decisamente complessa e ridondante, data la presenza di
numerosi attuatori e da meccanismi si attivazione sinergica di più muscoli. Una semplice
considerazione di carattere generale ci fa osservare che a seconda di quali movimenti si vuole
simulare, occorre garantire la presenza dell’attuatore che consente effettivamente l’esecuzione di
tale movimento. L’introduzione o meno di determinati elementi muscolari ha immediate
ripercussioni sullo spazio di lavoro che può essere esplorato dal braccio riprodotto dal modello.
Il ruolo rivestito da alcuni muscoli è tuttavia marginale in termini di apporto complessivo per
garantire l’esecuzione della maggior parte dei movimenti del braccio, si è scelto quindi di
modellare l’azione di alcune strutture muscolari che si è visto in letteratura essere coinvolte
maggiormente nel movimento di reaching (Turner, Sacco, Hunter) e nell’esplorazione generica del
workspace.
50
Figura 35: i muscoli del braccio e coinvolti nel suo movimento.
In accordo con lo studio citato, si sono quindi scelti i seguenti muscoli: bicipite, tricipite,
brachioradiale e deltoide (fasci anteriore e posteriore), cui sono stati aggiunti trapezio, gran
pettorale, gran dorsale, e pronatore dell’avambraccio (Pennestrì et al, 2006).
A ciascuno degli otto attuatori inseriti sono associate delle specifiche funzioni che vengono
illustrate nel seguente paragrafo.
Figura 36: i muscoli bicipite, tricipite e brachioradiale.
51
Il bicipite brachiale è il principale muscolo flessore dell’avambraccio; agisce quindi sul movimento
di q4 quando l’avambraccio è in flessione. In sinergia con il brachioradiale contribuisce alla
supinazione dell’avambraccio (q5). Il tricipite è il principale muscolo estensore dell'avambraccio;
interviene quindi per il movimento di q4 in contrapposizione al bicipite. Il muscolo brachioradiale
si trova nell’avambraccio. E’ coinvolto nel movimento di supinazione dell’avambraccio, e ne
garantisce la possibilità di flessione in sinergia con il bicipite. Risulta anch’esso fondamentale per
simulare l’azione su q4 e q5. Anche se rappresenta una semplificazione, nel modello si riterrà il
brachioradiale responsabile in supinazione dell’avambraccio, e il pronatore attivo in pronazione
(q5).
Figura 37: il muscolo deltoide, nella sua porzione anteriore e posteriore rispettivamente, e il
muscolo pronatore dell’avambraccio.
La schematizzazione dei muscoli che agiscono sulla spalla risulta particolarmente complessa a
causa della grande ridondanza i attuatori. E’ stata quindi effettuata una selezione dei muscoli
principali. Il deltoide è formato da tre parti, delle quali ne sono modellate due (anteriore e
posteriore); la sua funzione principale è quella di sollevare il braccio in tutte le direzioni fino a 90º,
essendo muscolo sia abduttore che elevatore. E’ quindi l’attuatore fondamentale per q2 in
elevazione anteriore (capo anteriore) e posteriore (capo posteriore).
52
Figura 38: i muscoli trapezio, gran dorsale, gran pettorale.
Il trapezio interviene elevando il braccio oltre i 90º (q2); il gran dorsale è responsabile
dell’estensione, adduzione e abduzione orizzontale (composizione di q1, q2), flessione a partire da
posizione estesa e rotazione interna della spalla (q3). Il gran pettorale ha tre funzioni
fondamentali: sollevare l’omero ruotando il braccio verso l’alto (q2), addurre l’omero a destra e a
sinistra (composizione di q1 e q2).
5.4.3 - MODELLAZIONE DEI MUSCOLI
Ciascun muscolo viene modellato come un elemento attuatore elastico (Rasmussen, 2005): ovvero
come un elemento in grado di scambiare forze di azione/reazione che agiscono lungo una
determinata direzione. Risulta quindi fondamentale definire per ciascun muscolo i punti
d’inserzione, che sono relativi al complesso muscolo-tendine. Il tendine ha una rigidità molto più
elevata del muscolo e pertanto le variazioni di lunghezza del complesso muscolo-tendine possono
essere approssimate come una variazione di lunghezza della sola struttura muscolare.
I punti d’inserzione vengono estratti dal database stilato da Yamaguchi (2001) e sono tabulati in
tabella 4. In tabella sono mostrati anche i valori
muscolo-tendine, e
, ovvero la lunghezza di ciascun complesso
, cioè il picco massimale di forza che un muscolo può esercitare. Tale valore
dipende dall’area di cross sezione del muscolo, che a propria volta è proporzionale alla sua massa,
al coseno dell’angolo formato tra le fibre del muscolo e la sua linea d’azione, e inversamente
proporzionale alla densità del muscolo e alla sua lunghezza. Nel modello sono inclusi in totale nove
elementi di azione/reazione per lo scambio delle forze.
53
Tabella 4: database dei muscoli dell’arto superiore (Pennestrì et al, 2006, citando Yamaguchi,
2001).
Figura 42: sistema di riferimento relativo ai dati in tabella.
Occorre definire delle relazioni che consentano di calcolare, istante per istante, alcuni parametri
muscolari: la direzione di azione lungo la quale il muscolo esercita forza, la lunghezza e la velocità
di accorciamento/allungamento. Per motivi legati all’anatomia e alla configurazione dei muscoli,
54
sono stati individuati due modelli differenti: il primo per i muscoli che agiscono su giunti planari
(q4 e q5), la cui meccanica è di tipo seriale, e che coinvolge i muscoli bicipite, tricipite,
brachioradiale e pronatore; il secondo per i muscoli che interessano la spalla, la cui meccanica è di
tipo parallelo ridondante: ogni attuatore può movimentare più giunti.
5.4.3.1 - MUSCOLI “PLANARI”
I punti di inserzione dei muscoli “planari” sono significativi della direzione di applicazione della
forza per il muscolo bicipite. Per tale muscolo, si definisce la lunghezza come la congiungente le
due inserzioni. La velocità di contrazione/allungamento V è invece definita facendo riferimento a
figura, secondo la formula:
–
Indicando con V1 la velocità della prima inserzione e con I la sua posizione, con V2 la velocità della
seconda inserzione e con J la sua posizione.
Figura 39: la velocità del muscolo bicipite.
Le medesime considerazioni non possono essere applicate ai muscoli tricipite, pronatore e
brachioradiale, per i quali è stata eseguita una rimappatura dell’inserzione in modo che la
direzione di attivazione sia corretta, sfruttando tavole antropometriche. Tale affermazione è vera
in
quanto
tali
muscoli
avvolgono
l’articolazione,
passando
dietro
di
essa.
Si è scelto quindi di modellare l’azione di ciascuno di questi muscoli attraverso una puleggia alla
55
quale è vincolata la seconda inserzione, che con il ruotare del giunto (e quindi della puleggia)
trascina l’inserzione, causando l’allungamento o l’accorciamento del muscolo e uno spostamento
dell’inserzione. Si nota che la direzione lungo la quale agisce il muscolo non risulta così essere
modificata. In figura è mostrato il movimento dell’inserzione per la flessione dell’avambraccio.
Tale modello prevede il muscolo possa allungarsi e accorciarsi con una velocità individuata dalla
formula:
)
Dove r è il raggio della puleggia e w la velocità angolare di giunto. La lunghezza del muscolo è
invece definita come:
)
Dove L0 è la lunghezza a riposo del muscolo, r il raggio della puleggia e q i il valore dell’angolo di
giunto.
Figura 40: modellazione del muscolo tricipite all’aumentare della flessione del braccio.
Sono stati inoltre inseriti alcuni muscoli agonisti, per rendere conto di tutto il contributo di forza
che può essere espresso: ai due capi del bicipite si unisce l’azione del muscolo brachiale, e sono
modellati entrambi i capi del tricipite.
56
5.4.3.2 - MUSCOLI DELLA SPALLA
I muscoli della spalla agiscono secondo una meccanica parallela ridondante. I tre giunti alla spalla
possono essere infatti mossi da più muscoli contemporaneamente, in modo non indipendente
l’uno dall’altro. La direzione d’azione è identificata dalla congiungente le due inserzioni per i
muscoli gran dorsale, trapezio e pettorale, mentre per i due fasci del deltoide (anteriore e
posteriore) è stata eseguita una rimappatura delle inserzioni per identificarne correttamente la
direzione d’azione, secondo una procedura analoga a quella illustrata nel paragrafo relativo ai
muscoli planari.
Per determinare la velocità di accorciamento dei muscoli, si anticipa una relazione che verrà
utilizzata in seguito:
Dove con
si indica la velocità angolare del giunto sferico rispetto agli assi cartesiani di
riferimento, e con
la velocità di accorciamento/allungamento dei muscoli che si vogliono
calcolare. Jm è un operatore che verrà definito in seguito; interessa ora individuare
, in modo da
poter calcolare .
Sfruttando le convenzioni cardaniche (λ=1), è possibile esprimere il legame tra le velocità angolari
del giunto sferico rispetto agli assi del sistema di riferimento principale (indicati con i,j,k), alle
variazioni degli angoli rispetto ai primi tre giunti, identificati come α, β, γ secondo la relazione:
57
Figura 41: raffigurazione delle grandezze che compaiono per determinare
.
5.4.4 - AZIONI SCAMBIATE ALL’END EFFECTOR
In corrispondenza dell’end effector, a causa del vincolo tra la mano del paziente e la manopola,
durante l’esecuzione di un task motorio o anche staticamente, sono scambiate delle forze e
coppie. Esse possono essere scomposte nei seguenti contributi:
Ftot = Fvol + Fgrav + Fin
Dove Ftot indica l’integrale di tutte le forze agenti dell’end effector, scomposto in tre componenti:
Fgrav indica la componente dovuta al peso del paziente che si scarica sul sostegno, Fin indica il
contributo dovuto alle forze d’inerzia, e Fvol indica le forze dovute alla contrazione muscolare
volontaria esercitata dal paziente.
Il contributo di forza all’end effector che ci interessa è quello dovuto alla componente di
attivazione volontaria dei muscoli, che può poi essere ripartito tra gli attuatori stessi tramite la
relazione cinetostatica. Tale contributo è ovviamente incognito, ma può essere ottenuto per
differenza: le forze e coppie antigravitarie sono note per stima a priori e utilizzate per il sostegno
del braccio del paziente; il termine Ftot , somma di tutti i contributi, è ottenuto per misura diretta
grazie
al
sensore
di
La stima delle forze d’inerzia, riportate all’end effector, avviene secondo la seguente:
58
forza.
Dove mb e mav sono le masse di braccio e avambraccio e ab e aav le accelerazioni dei relativi
baricentri.
Si può quindi risalire, per differenza, ai valori di forze e coppie letti dal sensore dovuti al solo
contributo delle azioni volontarie del paziente.
L’utilizzo della funzione di sostegno non è tuttavia obbligatoria: qualora non sia necessaria (ad
esempio nel caso il paziente sappia già sostenersi, o la prova sia condotta su un soggetto sano),
l’utilizzo del sensore non cambia. Infatti, in questo caso, rientrano tra le forze volontarie erogate
dal paziente anche parte delle azioni deputate al sostegno della gravità, in quanto autogenerate
dal paziente, senza necessità d’intervento del robot.
5.4.5 - ANALISI CINETOSTATICA E MATRICE JM
Lo scopo di questa sezione è individuare un metodo per risalire alle forze agenti sui muscoli,
isolando il contributo di maggior interesse relativo alle forze prodotte volontariamente dal
paziente.
Il primo passo consiste nell’analisi cinetostatica del sistema. Si tratta di un metodo appartenente
alla teoria robotica, che consente di legare le forze (e coppie) scambiate in corrispondenza
dell’end effector (
) alle coppie erogate ai giunti ( ). Tale legame è espresso dalla matrice
jacobiana J del sistema, che è possibile costruire se sono noti i parametri di Denavit-Hartenberg
del robot, secondo la relazione:
Tale relazione è efficace per un generico robot i cui giunti siano mossi da un motore; note le forze
misurate all’end effector, è nota anche la coppia corrispondente su ciascun giunto.
La matrice jacobiana J interviene anche nella relazione tra grandezze cinematiche:
dove
è la velocità dell’EE, J la matrice Jacobiana del robot che costituisce il braccio,
la derivata
dei gradi di libertà (ovvero, il vettore contenente le velocità angolari di giunto). La matrice
Jacobiana lega quindi anche la velocità dell’end effector, espressa in coordinate cartesiane, alla
59
velocità di movimento nello spazio dei giunti. Può essere costruita geometricamente, ma poiché
non costituisce il vero cuore del modello ed è nota una volta assegnata la struttura cinematica del
robot, viene determinata numericamente dal Robot Toolbox di Matlab.
Il passo ulteriore da compiere, consiste nell’osservare che i motori del sistema non sono
rappresentati da “generatori di coppia” associati i relativi giunti, ma che ogni giunto nel modello è
mosso da almeno due attuatori muscolari che a loro volta possono esercitare una forza che
interviene sul movimento di più giunti, per generare le coppie di giunto necessarie. Interessa
quindi individuare un legame tra i valori di giunto e gli attuatori muscolari; si individua la seguente
relazione cinematica:
dove Jm è la matrice che associa all’accorciamento/allungamento di ciascun muscolo il contributo
che
esso
svolge nel
muovere
ciascun
grado
di libertà,
e
è
la
velocità
di
allungamento/accorciamento di ciascun attuatore.
Per la dualità cinetostatica, la matrice Jm interviene, al pari di quella jacobiana, anche nella
relazione tra grandezze dinamiche:
Dove con
si indicano le coppie ai giunti e con
si indicano le forze agenti sui muscoli.
Combinando le precedenti si può scrivere:
Dove si indicano con dle la velocità all’end effector e con dlm la velocità di accorciamento dei
muscoli.
Ci si prefigge ora di individuare un legame tra grandezze dinamiche, in particolare tra le forze
agenti sul muscolo e le forze scambiate all’end effector. Per farlo, si applica il principio dei lavori
virtuali. Sapendo che dle e dlm sono legate a variazioni infinitesime virtuali del posizionamento
60
dell’end effector e degli attuatori rispettivamente, mentre
effector e
sono le forze che agiscono sull’end
sugli attuatori, si può scrivere:
Sostituendo si ricava:
Sviluppando i calcoli:
Raccogliendo dlm’:
Dovendo valere per ogni spostamento virtuale dlm’, si deduce che:
Questa relazione indica che, se si conoscono le azioni (o azioni equivalenti) che agiscono sull’end
effector, si possono ricavare direttamente il valore delle forze sui muscoli che muovono il sistema.
La parte più significativa del modello consiste nell’individuare la matrice Jm, che rende
quantitativo il legame tra le forze esercitate da ciascun muscolo e le coppie che agiscono su ogni
giunto. Per la dualità cinetostatica, tale matrice risulta essere la medesima che lega le grandezze
cinematiche: la velocità di accorciamento dei muscoli e il movimento che essi inducono su ciascun
giunto, cioè la formulazione data sopra. Nei prossimi paragrafi viene illustrata la procedura per
determinare Jm.
5.4.6 - MODELLAZIONE GIUNTO BIDIMENSIONALE - GOMITO
Per i giunti planari del gomito (q4 e q5), si vuole individuare la formulazione della matrice Jm. Essa
ha dimensioni 2x4; 2 sono i giunti, 4 i muscoli che agiscono a livello del gomito. Jm è una matrice
non quadrata, di dimensione (numero di gradi di libertà x numero di muscoli), e può essere
61
ottenuta come pseudo inversa della matrice ottenuta secondo la procedura seguente; il legame
che si individua risulta essere:
Per trovare
, si procede muovendo l’i-esimo grado di libertà secondo la traiettoria fornita, in
modo da separare i contributi di ciascuno di essi al movimento, posa per posa. Si valuta poi le
velocità di accorciamento del muscolo j-esimo, dovuta al movimento del solo i-esimo grado di
libertà, secondo la procedura mostrata nel capitolo 4.4.3.1. Tale velocità diviene l’elemento i,jesimo della matrice ricercata. Questo procedimento è giustificato dagli studi di Hinson, Smith e
Funk (1979) che riportano: “l’evidenza sperimentale dimostra che la velocità costante del
movimento angolare degli arti non è accompagnata da velocità costante di accorciamento dei
muscoli”. Il profilo di accorciamento risulta infatti “a campana”.
5.4.7 – MODELLAZIONE GIUNTO SFERICO: SPALLA
La modellazione dei giunti della spalla risulta essere più complessa. Infatti il giunto sferico è
tridimensionale e l’azione dei muscoli non è indipendente lungo ciascun giunto, ma legata
all’azione che il medesimo muscolo può avere sui tre giunti contemporaneamente. Si tratta quindi
di un’azione muscolare parallela. Il sistema è mostrato in figura:
Figura 43: il sistema biomeccanico del giunto sferico che modella la spalla (rappresentazione
qualitativa).
62
Per individuare la matrice Jm (dimensione 3x5), ci si serve della formulazione rispetto a grandezze
dinamiche di tale matrice, che si ricorda essere:
Dove
e
sono le coppie applicate rispetto al sistema di riferimento assoluto centrato nella spalla
le forze agenti sui muscoli.
La formulazione della matrice Jm rispetto alle grandezze dinamiche, così scritta, non è altro che la
matrice che contiene i bracci di leva di ciascun muscolo nei confronti di ciascuno dei tre assi.
L’elemento i-j-esimo della matrice Jm è dato dalla distanza tra l’asse i-esimo e il muscolo j-esimo.
Figura 44: rappresentazione qualitativa dei termini di Jm.
5.4.8 - MATRICE DI ATTIVAZIONE MUSCOLARE
La matrice Jm rappresenta le potenzialità che ogni muscolo ha di muovere uno specifico giunto.
Tuttavia l’attivazione muscolare è prerogativa di una sola azione di accorciamento. Pertanto, la
matrice Jm verrà pesata, termine per termine, da un’ulteriore matrice L composta di 0 ed 1 in
63
corrispondenza dell’attivazione o meno di un muscolo durante l’esecuzione di uno specifico task,
in modo da considerare attivi solo i muscoli in accorciamento. Tale procedimento è valido se si
ritiene che solo il muscolo agonista stia esercitando forza, quindi in assenza di cocontrazioni.
Quest’ultima matrice “binaria” è rappresentativa dell’attivazione dei motori in ogni specifico
istante della traiettoria, ed è ottenuta nuovamente per mezzo dell’applicazione della relazione
cinetostatica:
Dove
è il vettore delle coppie ai giunti, J la matrice jacobiana del robot relativa alla
configurazione in esame, e
le forze misurate all’end effector depurate dalla componente
gravitaria e dalle forze d’inerzia. Il segno della coppia agente su ciascun giunto definisce quali
muscoli sono attivati; pertanto, sotto l’ipotesi semplificativa che tale coppia non sia dovuta ad
un’azione differenziale degli attuatori di quel giunto ma solo all’azione del muscolo agonista, è
possibile identificare quali muscoli stiano agendo per il movimento di quali giunti.
I muscoli svolgono le seguenti funzioni:
-
q1: coppia antioraria, pettorale; oraria, gran dorsale;
-
q2: fino a quota della spalla: coppia in elevazione, deltoide anteriore; coppia in discesa,
pettorale; sopra quota della spalla: in elevazione, trapezio, in discesa, gran dorsale.
-
q3: coppia in rotazione interna, gran dorsale, coppia in rotazione esterna: deltoide
posteriore;
-
q4: coppia in flessione avambraccio, bicipite; in estensione, tricipite.
-
q5: coppa in supinazione, brachioradiale; in pronazione, pronatore.
Si ottiene così la relazione cinetostatica finale del modello, con la matrice Jm pesata dalla matrice
L elemento per elemento:
Jmi,j = Jmi,j Li,j
La modellazione proposta nel paragrafo precedente suggerisce una metodologia per il calcolo
delle forze agenti su ciascun muscolo. Tuttavia tale approccio necessita di differenziare la
64
metodologia di costruzione della matrice Jm, che è differente perché è diversa la configurazione
dei muscoli e la loro azione per la spalla e il gomito.
5.4.9 - MODELLO MATEMATICO MUSCOLARE
La forza generata da un muscolo è dovuta alla somma di due componenti: attiva e passiva. La
componente attiva è generata dallo scorrimento dei filamenti di actina e miosina, ovvero
dall’intervento delle componenti contrattili del muscolo. La componente passiva, al contrario, è
dovuta al contributo di forza fornito dalle componenti non contrattili di origine elastica. In prima
analisi un muscolo può essere considerato come un attuatore la cui forza attiva agisce su un
elemento elastico posto in serie. Hill (1922) osservò tuttavia che un muscolo riesce a produrre più
forza in condizione isometrica; più velocemente esso si accorcia, minore è la forza che può
produrre. Si tratta di un comportamento analogo a quello di un pistone che comprime un fluido:
più veloce si spinge il pistone, maggiore è la resistenza che il fluido offre. Queste considerazioni
inducono a dedurre la presenza di un elemento viscoso, caratteristico della contrazione
muscolare. Pertanto, al modello iniziale, si aggiunge in parallelo la presenza di uno smorzatore
viscoso. L’elemento elastico risulta responsabile dei rapidi accorciamenti e allungamenti del
muscolo quando muta la sollecitazione a carico, ed è caratterizzato da un valore di stiffness.
L’elemento viscoso ne spiega il comportamento dinamico, inteso come capacità di generare forza
in base alla velocità della contrazione. Esso è caratterizzato da un coefficiente di viscosità. I due
elementi sopra descritti costituiscono il modello delle componenti passive della forza muscolare.
La forza contrattile (attiva) del muscolo agisce contro queste componenti per fornire l’effettiva
forza che l’attuatore produce durante una contrazione.
Per il calcolo della tensione totale che agisce su un muscolo, somma dei contributi di tensione
attiva e passiva, è utilizzato il modello proposto da Zajac (1989), che incorpora le relazioni dovute
alle componenti elastiche e viscose proposte da Maxwell e Voigt e quelle di contrazione attiva
valutate da Hill, entrambe in funzione di lunghezza del muscolo e sua velocità di contrazione. La
forza totale che agisce sul muscolo è pari a:
Dove Fa e Fp rappresentano i contributi di forza attiva e passiva che agiscono sul muscolo, a(t) un
valore di attivazione compreso tra 0 e 1, che rende conto del grado di contrazione volontaria del
65
muscolo. f1, f2, f3 rappresentano funzioni sperimentali dipendenti da stiramento del muscolo e
sua velocità di contrazione, la cui forma è la seguente:
Valgono infatti:
Dove
l
è
la
lunghezza
del
muscolo
e
V
la
sua
velocità
di
contrazione.
La forza Fm agente su ciascun muscolo è nota, ricavata come parametro di uscita dalla relazione
cinetostatica, applicata punto per punto della traiettoria; il parametro incognito che si vuole
ricavare è dunque a(t), e a seguito di esso, le componenti di forza attiva e passiva agenti su ciascun
muscolo.
5.5 - CALCOLO DELLA POTENZA ESPRESSA AI GIUNTI
Si è infine calcolata la potenza espressa ai giunti, ottenuta come prodotto tra le coppie agenti su
ciascun giunto e la relativa velocità angolare di rotazione.
Dove C è ottenuta attraverso la relazione cinetostica:
Fe rappresenta il termine di forze misurate all’end effector. Si può quindi ricercare la potenza
espressa ai giunti per bilanciare l’effetto gravitario, per il movimento, o per entrambi.
Il modulo della velocità angolare di ciascun giunto è invece espresso dalla relazione:
wi = (qi – qi-1) * fc
Dove fc è la frequenza di campionamento della traiettoria.
66
6 - VALIDAZIONE MODELLO
Nel seguente capitolo sono chiarite le procedure e i protocolli di cui ci si è serviti per l’acquisizione
dei movimenti, e sono illustrati i parametri di validazione del modello biomeccanico.
6.1 - PROTOCOLLO DI ACQUISIZIONE
La validazione del modello, in termini procedurali, si divide in due parti: la prima, volta a verificare
la correttezza delle previsioni fatte in sede di sostegno del braccio, e la seconda, che consiste
invece nel servirsi di tale stima per calcolare tutte le grandezze d’interesse (forza ai muscoli,
attivazione muscolare, potenza ai giunti…). L’utilizzo del modello si basa su una corretta
quantificazione delle forze gravitarie; pertanto, il primo paragrafo di questo capitolo è dedicato al
confronto tra i valori registrati sul sensore di forza e le previsioni fatte dal modello, sulla base di
alcune configurazioni predefinite. Per garantire la validità dell’ipotesi alla base del problema
(paziente totalmente sostenuto contro gravità), è stato costruito un dispositivo che sostiene
integralmente il braccio, le cui reazioni si scaricano integralmente sull’end effector del robot.
Allo scopo di ricavare le grandezze d’interesse, la seconda parte del protocollo di validazione
prevede l’esecuzione di dieci traiettorie di reaching antigravitario consecutive, eseguite in
movimento lento, seguendo tre leggi di moto differenti, partendo da posizione seduta, con
schiena eretta, braccio appena arretrato rispetto alla verticale, e mano poggiata sulla porzione
prossimale
della
coscia,
con
avambraccio
poco
inclinato
verso
il
basso.
Il soggetto è ancorato al robot senza ortesi: il controllore del robot non è ancora in grado di gestire
le rotazioni dell’end effector, pertanto risulta al momento impossibile eseguire il movimento con il
supporto dell’ortesi. L’impianto teorico sviluppato resta valido purchè siano modificati il punto di
appoggio e nel quale si concentrano le reazioni (ora coincidente con il polso del modello, al posto
del baricentro dell’ortesi) e senza valutare il contributo delle coppie all’end effector, il cui valore è
determinato dalla possibilità di muovere il polso (dato che non c’è l’ortesi a impedirne i
movimenti). Le azioni associate ai gradi di libertà del polso sono responsabili della gran parte del
contributo
di
coppia,
e
per
questo
vengono
trascurate.
La cinematica delle traiettorie e della configurazioni di sostegno gravitario acquisite è ottenuta
tramite l’utilizzo di tre marcatori passivi, posti sull’acromion, sul gomito e sul polso in
67
corrispondenza della testa dell’ulna. Il movimento prevede il raggiungimento di un target posto
all’altezza della spalla e raggiungibile per mezzo del braccio completamente teso in avanti. La
frequenza di campionamento della cinematica è di 140 Hz; l’acquisizione dei sensori di forza oscilla
tra i 166 e i 200 Hz. Per garantire il sincronismo e la corrispondenza tra le due acquisizioni, i dati
acquisiti dal sensore subiscono un processo di interpolazione e ricampionamento a 140 Hz. Il
software prevede la possibilità di sottocampionare ulteriormente i dati; le prove effettuate nel
capitolo
di
validazione
prevedono
un
sottocampionamento
I parametri di validazione vengono indicati paragrafo per paragrafo.
68
di
un
fattore
14.
6.2 - PREVISIONI MODELLO – CONDIZIONI STATICHE
Per alcune pose all’interno del workspace è calcolato il contributo di forze necessario al sostegno
gravitario di un soggetto sano alto 178 cm e di 61 kg di peso. Tali previsioni sono state comparate
con
i
valori
medi
forniti
dal
sensore
di
forza.
Figura 45: configurazione di prova, fotografata e raffigurata tramite Robot toolbox.
Tabella 5: valori di forze e coppie misurate dal sensore e calcolate tramite il modello nella
configurazione di figura 45.
Azione
Forze
EE Forze gravitarie Errore
(misurate
dal (calcolate
di
dal previsione
sensore)
modello)
Fx
0.6629 N
-0.5316 N
-1.1945 N
Fy
-0.7819 N
-1.8872 N
-1.1053 N
Fz
11.3706 N
15.5155 N
4.1449 N
Cx
0.1712 Nm
0.1356 Nm
-0.0356 Nm
Cy
2.6303 Nm
2.4448 Nm
-0.1855 Nm
Cz
-0.1832 Nm
0.0805 Nm
0.2637 Nm
69
Figura 46: configurazione di prova, fotografata e raffigurata tramite Robot toolbox.
Tabella 6: valori di forze e coppie misurate dal sensore e calcolate tramite il modello nella
configurazione di figura 46.
Azione
Forze gravitarie Forze gravitarie Errore
(misurate
dal (calcolate
di
dal previsione
sensore)
modello)
Fx
1.5750 N
-4.1638 N
-5.7388 N
Fy
-2.6575 N
-6.6253 N
-3.9678 N
Fz
17.5671 N
16.9452 N
-0.6219 N
Cx
4.3710 Nm
2.8837 Nm
-1.4873 Nm
Cy
-0.2754 Nm
-0.3490 Nm
-0.0736 Nm
Cz
-0.1970 Nm
-1.0595 Nm
-0.8625 Nm
70
Figura 47: configurazione di prova, fotografata e raffigurata tramite Robot toolbox.
Tabella 7: valori di forze e coppie misurate dal sensore e calcolate tramite il modello nella
configurazione di figura 47.
Azione
Forze gravitarie Forze gravitarie Errore
(misurate
dal (calcolate
di
dal previsione
sensore)
modello)
Fx
2.7734 N
-0.0065 N
-2.7799 N
Fy
0.6191 N
0.0083 N
-0.6108 N
Fz
20.2932 N
18.3894 N
-1.9038 N
Cx
4.7268 Nm
2.9428 Nm
-1.784 Nm
Cy
-0.3901 Nm
-1.1561 Nm
-0.766 Nm
Cz
0.0316 Nm
0.0045 Nm
-0.0271 Nm
71
Figura 48: configurazione di prova, fotografata e raffigurata tramite Robot toolbox.
Tabella 8: valori di forze e coppie misurate dal sensore e calcolate tramite il modello nella
configurazione di figura 48.
Azione
Forze gravitarie Forze gravitarie Errore
(misurate
dal (calcolate
di
dal previsione
sensore)
modello)
Fx
0.7617 N
-3.4850 N
-4.2467 N
Fy
-0.1043 N
0.5125 N
0.6168 N
Fz
8.4703 N
9.1437 N
0.6734 N
Cx
1.7341 Nm
0.7220 Nm
-1.0121 Nm
Cy
-0.0618 Nm
-0.0632 Nm
-0.0014 Nm
Cz
0.1313 Nm
0.8667 Nm
0.7354 Nm
72
Si riporta l’errore medio compiuto dal modello nella valutazione di forze e coppie nelle quattro
configurazioni in tabella 9. L’errore medio risulta essere basso per forze lungo la direzione y e z, e
per le coppie lungo y e z. Si notano invece discrepanze rilevanti comparando forze e coppie lungo
x. Non è stata condotta un’analisi statistica più dettagliata per necessità di valutazione di un
numero elevato di soggetti in un numero elevato di pose.
Tabella 9: errore di previsione medio.
Azione
Errore di previsione medio
Fx
-3.4900 N
Fy
-1.2668 N
Fz
0.5731 N
Cx
-1.0784 Nm
Cy
-0.2566 Nm
Cz
0.0274 Nm
Le misure effettuate garantiscono un grado di precisione da interpretare in considerazione degli
errori introdotti in fase di procedura sperimentale, di errori di misura del sensore stesso, e di
approssimazioni compiute dal modello. La procedura di acquisizione dei dati contiene due fonti
d’errore: in primo luogo, il posizionamento dei marker introduce un errore di dislocazione
quantificabile in 2-4 centimetri in quanto il marcatore non è esattamente posizionato sul punto
anatomico di cui si tiene traccia; l’errore può essere cumulato a seconda della configurazione in
cui si trova il braccio. Inoltre, l’acquisizione dei dati su un soggetto sano comporta la generazione
“involontaria” di una coppia di sostegno alla spalla. Si ritiene infatti che i valori rilevati sui sensori
siano affetti da errori causati dall’appoggio: il braccio del soggetto è involontariamente in parte
auto sostenuto, pertanto si scaricano delle azioni di entità inferiore in corrispondenza dell’ortesi, e
quindi anche del sensore. Il sensore introduce a propria volta un errore che oscilla tra -1,5 N e 1,5
N rispetto al valore corretto, mentre per le coppie l’imprecisione si attesta entro un range
compreso tra -0.15 N e 0.15 N. Ci sono anche degli elementi di imprecisione introdotti dal
modello: la lunghezza e la massa dei segmenti anatomici sono ricavate da tabelle
antropometriche, mentre per un utilizzo corretto del modello sarebbe opportuna una misurazione
73
diretta di tali parametri. Il modello semplifica inoltre la geometria del sistema, valutando come
monodimensionali braccio e avambraccio, e approssimando la posizione del centro-spalla; si
introduce
pertanto
un
ulteriore
margine
di
errore.
Per un’analisi più accurata dei dati, si rileva l’importanza dell’esecuzione di un maggior numero di
prove, così da poter condurre un’analisi statistica che consenta di interpretare correttamente le
previsioni effettuate dal modello; inoltre, tali rilevazioni andrebbero eseguite su pazienti affetti da
patologie neurologiche, in modo da rendere pienamente valida l’ipotesi di braccio non in grado di
autosostenersi. A queste osservazioni si unisce la necessità di tarare alcuni parametri quali massa
e lunghezza sei segmenti anatomici per garantire che essi siano rappresentativi del paziente in
oggetto.
74
6.3 - CONDIZIONI DINAMICHE
Il movimento analizzato è di di reaching antigravitario a velocità lenta, andata e ritorno ripetuti più
volte, spingendo il robot. Si tratta di un task motorio che si sviluppa in ampia prevalenza lungo il
piano sagittale, che decorre in direzione anteroposteriore, come illustrato in figura 49. Il
movimento consiste nell’estensione frontale del braccio, all’altezza della spalla, a partire da
posizione seduta, l’avambraccio flesso e la mano appoggiata sulla parte prossimale della coscia.
Figura 49: I piani principali. Il movimento di reaching si sviluppa prevalentemente sul piano
sagittale, che decorre in direzione anteroposteriore.
In figura 50 è mostrata una visione bidimensionale, sul piano sagittale, del movimento. In nero, la
posizione della spalla; in blu, le posizioni del gomito; in verde, le posizioni del polso. I dati sono già
filtrati con filtro passa basso di Chebychev a doppio polo, con frequenza di taglio di 5 Hz. Il
movimento è acquisito a 140 Hz, sottocampionato di un fattore 14, per un totale di 10 campioni
acquisiti al secondo. L’insieme delle posizioni riportato comprende tutta l’acquisizione, mentre le
elaborazioni successive, per limitare il costo computazionale, e vista l’alta ripetibilità del
movimento almeno all’interno della medesima acquisizione, sono riferite ai primi tre movimenti di
reaching e relativo ritorno.
Sono stati posti quattro elettrodi per la valutazione del segnale elettromiografico proveniente dai
muscoli deltoide anteriore, deltoide posteriore, bicipite e tricipite del soggetto, valutati sulla
75
medesima finestra temporale dei primi 3 movimenti di reaching e ritorno, messi a confronto con le
stime dei valori di forza predetti dal modello. Il segnale è acquisito a 1000 Hz e sincronizzato con la
cinematica.
Al fine di valutare il modello muscolare, sono state eseguite due ulteriori acquisizioni sul
medesimo soggetto: la prima, seguendo il robot con profilo di velocità trapezoidale, e la seconda
con medesima modalità ma profilo di velocità bell-shaped (a campana). Quest’ultimo movimento
risulta avere un profilo di velocità simile al movimento naturale di soggetti sani. Si è scelto il
muscolo maggiormente coinvolto nel movimento di reaching (il deltoide anteriore) per osservare
la variazione di forza muscolare attiva e passiva al variare della legge di moto.
Il capitolo è strutturato in modo da valutare l’entità dei parametri individuati dal modello ritenuti
più rappresentativi, a seguito della simulazione prodotta grazie al trattamento dei dati ottenuti dal
sistema ottico a marker passivi e dai sensori di forza.
Figura 49: traiettoria di reaching (dati filtrati con filtro di Chebychev passa basso, frequenza di
taglio 5 Hz). In nero la spalla, in blu il polso, in verde il gomito. Piano di vista sagittale.
Il movimento di reaching visualizzato in figura 49 è rappresentato sul piano sagittale (assi y e z del
riferimento).
76
Costruzione della matrice di rototraslazione omogenea
A seguito dell’acquisizione dei dati cinematici, si costruisce la matrice omogenea di rototraslazione
che costituisce, posa per posa, il dato della cinematica inversa. La quarta riga della matrice
contiene semplicemente l’orlo; le quattro colonne di tre valori rappresentano rispettivamente le
direttrici degli assi x, y e z dell’ultima terna e la posizione del polso. L’asse z di rotazione dell’ultimo
giunto corrisponde con la direzione della congiungente gomito-polso, e la parte di traslazione è
data dalle coordinate cartesiane del polso. Si suppone fissato l’orientamento egli assi x e y
dell’ultima terna. Si ottengono le seguenti matrici (si riportano due esempi, del primo campione e
di uno degli ultimi):
In riferimento a figura 50, si osserva come la posizione del polso indicata dalla matrice (T:,:,1) sia
coerente con le coordinate identificate per il punto di partenza del reaching, così come
l’orientamento dell’asse di prono supinazione dell’avambraccio, orientato frontalmente e
parzialmente
deviato
verso
il
basso.
La matrice T(:,:,190) è relativa ad una configurazione in cui il braccio è quasi tornato alla posizione
di inizio reaching; la posizione del polso si avvicina a quella iniziale e l’avambraccio è orientato
frontalmente.
Valori ai giunti
A seguito delle considerazioni precedenti, si riportano i valori ottenuti nel calcolo della cinematica
inversa: gli angoli descritti da ciascun giunto durante l’esecuzione dei tre movimenti di reaching e
relativo ritorno.
77
Figura 50: andamenti degli angoli di giunto: in blu, giunto 1; in verde, giunto 2; in rosso, giunto 3;
in ciano, giunto 4; in viola, giunto 5.
Il quinto giunto è considerato fermo per le ipotesi illustrate in precedenza (necessarie a fornire
una matrice di rototraslazione omogenea come dato per la computazione della cinematica
inversa).
La posizione del braccio calcolata dal modello ricalca abbastanza bene quella movimento di
reaching. Si osserva come il terzo giunto presenti una leggermente troppo marcata rotazione
esterna della spalla, mentre il quarto giunto, a termine del movimento, non raggiunge la piena
estensione, e dunque il braccio resta leggermente flesso. Il valore dell’angolo al primo giunto
appare anch’esso leggermente sottostimato; tale andamento è giustificato dal posizionamento dei
marker,
che
crea
un
leggero
artefatto
di
posizione
tra
spalla
e
gomito.
Un dimensionamento dei parametri antropometrici del soggetto, unitamente ad un algoritmo di
correzione della posizione dei marker, dovrebbe risolvere i pur lievi gli errori di predizione
attualmente presenti.
78
Stime delle forze gravitarie, forze volontarie, forze d’inerzia e forze misurate
all’end effector
Le considerazioni riportate in seguito fanno riferimento alle azioni scambiate lungo gli assi x, y e z
del riferimento. Noti i parametri cinematici del movimento, si procede al calcolo della stima delle
forze di sostegno gravitario, evidenziate sul grafico in colore blu. Queste forze dipendono solo
dalla configurazione in cui si trova il soggetto, e sono quelle che il robot deve erogare per il
sostegno del sistema; corrispondono, cambiate di segno, alle azioni che il soggetto, per gravità,
scarica sull’end effector. Le forze misurate all’end effector dai sensori sono invece evidenziate in
nero. Quest’ultimo tracciato rappresenta il totale delle forze che il soggetto scarica sull’end
effector; sottraendo quindi le componenti gravitaria e d’inerzia, si ottiene per differenza il
contributo dovuto alle forze volontarie, tracciate in verde sul grafico.
a)
79
b)
c)
Figura 51: forze di sostegno (blu), forze d’inerzia (rosso), forze misurate all’end effector (nero) e
conseguenti forze di attivazione volontaria (verde). a=direzione x; b=direzione y; c=direzione z.
80
Si osserva innanzitutto che l’entità delle forze d’inerzia è limitata; il sistema si muove con
accelerazioni sempre inferiori a
. Movimenti basati su leggi di moto più vicine alla quotidianità
dei movimenti potrebbero evidenziare contributi inerziali più elevati. Il contributo delle forze
inerziali risulta limitato anche perché il tracciato si riferisce ad una movimentazione dell’end
effector interamente a carico del paziente; le forze volontarie in gioco risultano di un ordine di
grandezza superiori.
Dai grafici si osserva come le forze volontarie espresse dal paziente e misurate in corrispondenza
dell’end effector abbiano verso concorde con la direzione del movimento, in accordo con quanto
ci si attende. Analizzando il movimento sul piano sagittale si nota come lo spostamento contro
gravità nella fase di reaching, è accompagnato da forze Fy negative, in accordo con la direzione del
movimento, e positive nella fase di ritorno. Allo stesso modo, durante il reaching le forze Fz lungo
l’asse z agiscono contro gravità, mentre diventano negative al ritorno, quando l’end effector si
muove secondo gravità.
Forze ai muscoli
Si riportano i valori di forza muscolare individuati dalla relazione cinetostatica: la forza volontaria
espressa dal paziente sull’end effector ripartita su ogni muscolo.
Figura 52: forze erogate da pettorale (blu), gran dorsale (verde) e trapezio (rosso).
81
I muscoli dorsale e pettorale sono antagonisti al primo giunto; gli intervalli di attivazione congiunta
derivano dal fatto che il muscolo pettorale interviene anche per la movimentazione del secondo
giunto (in coppia discendente) e il dorsale interviene invece in rotazione interna della spalla.
Il muscolo trapezio non interviene; nel modello agisce solo per elevare il braccio oltre l’altezza
della spalla. Tale condizione rappresenta però il limite del range of motion del movimento di
reaching.
Figura 53: forze erogate da deltoide anteriore (blu) e deltoide posteriore (verde).
82
Figura 54: tracciato EMG relativo ai muscoli deltoide anteriore (blu) e deltoide posteriore (verde).
Il confronto tra i grafici conferma come nel movimento di reaching si attivi il muscolo deltoide
anteriore, elevatore del braccio, che si alterna al deltoide posteriore nella fase di discesa. Il
modello ricalca l’andamento dell’emg, da cui si evince però la presenza di cocontrazioni muscolari
(contrazioni del muscolo antagonista il cui scopo è stabilizzare l’articolazione), la cui entità è
elevata a causa della lentezza del movimento (poco più di 4 secondi tra salita e discesa). Un
movimento eseguito più lentamente è caratterizzato da un pattern di attivazione muscolare più
ricco di cocontrazioni di stabilizzazione. Nel paragrafo relativo alle conclusioni e sviluppi futuri
verranno riprese queste considerazioni.
83
Figura 55: forze erogate da bicipite (blu) e tricipite (verde).
Figura 56: tracciato EMG relativo ai muscoli bicipite (blu) e tricipite (verde).
In accordo con le previsioni cinematiche relative al quarto giunto, l’attivazione del muscolo bicipite
precede quella del tricipite nella fase iniziale del movimento di reaching. Il modello attribuisce in
seconda battuta l’intera coppia di giunto al muscolo tricipite, mentre dal grafico relativo all’attività
elettromiografica dei due muscoli, si evince come in un movimento lento e senza netta prevalenza
di lavoro compiuto da un muscolo rispetto all’antagonista, l’entità delle cocontrazioni sia rilevante.
84
Le forze erogate dai due muscoli del quinto giunto sono nulle, in quanto in fase di costruzione
della matrice omogenea si è imposto un orientamento fisso dell’avambraccio.
Coppie ai giunti
Il grafico riportato di seguito illustra i valori di coppia ai giunti erogata da ciascun giunto, ad opera
della volontaria azione del paziente.
Figura 57: Coppia ai giunti dovuta al contributo volontario del soggetto ai cinque giunti: primo
giunto, in blu; secondo, in verde; terzo, in rosso; quarto in ciano; quinto, in viola.
La coppia volontaria espressa dal soggetto si indirizza prevalentemente sul secondo giunto, come
ci si attendeva, essendo il giunto maggiormente interessato dal movimento di reaching in esame.
Tale coppia movimenta il braccio sia in direzione frontale che in elevazione.
MODELLO MUSCOLARE: PROVE COMPARATIVE
Si riportano di seguito tre grafici relativi al muscolo deltoide anteriore, relativi al medesimo task
motorio, secondo tre leggi di moto differenti.
85
Figura 58: Forze attive sul muscolo deltoide anteriore (blu), e passive (in verde), per movimento di
reaching con movimentazione del robot da parte del soggetto.
Figura 59: Forze attive sul muscolo deltoide anteriore (blu), e passive (in verde), per movimento di
reaching inseguendo la traiettoria con profilo di velocità trapezoidale.
86
Figura 60: Forze attive sul muscolo deltoide anteriore (blu), e passive (in verde), per movimento di
reaching inseguendo la traiettoria con profilo di velocità “a campana”.
I tre grafici non presentano variazioni significative; il soggetto è sano e il modello muscolare
predice valori di forza passiva e attiva la cui entità non si discosta in modo consistente. Per un
soggetto sano, si osserva quindi una dipendenza estramamente ridotta dalle leggi di moto per le
componenti
muscolari
attiva
e
passiva.
Il movimento di pazienti neurologici è invece frequentemente caratterizzato da spasticità e di
conseguenza l’allungamento e accorciamento improvviso e non controllato delle fibre muscolari
può indurre una maggiore opposizione al moto e, di conseguenza, un valore di forza passiva di
entità superiore rispetto a quella calcolata su un soggetto attivo.
87
7 – CONCLUSIONI E SVILUPPI FUTURI
E’ stato sviluppato un modello neuromuscolare dell’arto superiore umano, allo scopo di integrarlo
all’interno del controllore del robot Mitsubishi Pa-10 in dotazione all’Istituto di Tecnologie
Industriali e Automazione del Consiglio delle Ricerche di Milano. Il modello consente per ora
un’analisi dei dati offline, ma si adatterà alle necessità specifiche della piattaforma riabilitativa:
servirà a guidare il robot evitando configurazioni pericolose per l’integrità del braccio del paziente,
a valutare le forze e coppie necessarie per sostenere il paziente grazie al supporto di un’apposita
ortesi, e a ottenere stime di parametri meccanici e muscolari d’interesse. Il modello è stato
parzialmente validato per mezzo delle prime prove sperimentali che hanno dato esiti
soddisfacenti; si sono individuate le fonti di errore e il prossimo passo consisterà nell’integrarlo
all’interno della piattaforma riabilitativa e nell’utilizzo dell’ortesi definitiva. Per ottenere delle
stime più precise dei parametri biomeccanici d’interesse, le prime prove sperimentali hanno
evidenziato la possibilità di valutare una taratura dei parametri del modello per tenere conto in
modo accurato dei parametri antropometrici del paziente.
Si evidenzia anche la necessità di eseguire prove su pazienti affetti da patologie neurologiche per
un più ricco e statisticamente valido processo di validazione del modello, sia per garantire un
campione di prove maggiore, sia per utilizzare il modello nelle condizioni che ricalchino le ipotesi
di sviluppo entro le quali si è stato realizzato il lavoro. L’esecuzione di prove su paziente
neurologici permetterà anche di valutare se sia necessario adeguare o reindirizzare alcune scelte
progettuali per l’effettivo utilizzo della piattaforma riabilitativa, sia di discutere le leggi di moto che
risultino al tempo stesso più confortevoli per i pazienti e più efficaci per la riabilitazione.
In ottica di possibili miglioramenti futuri da apportare, è possibile valutare la modellazione di
ulteriori gruppi di muscoli, per rendere più completo il modello ridondante della spalla, tenendo
conto dell’azione di tutti gli attuatori che la movimentano. Questo procedimento dovrebbe ridurre
parzialmente il contributo di forza che il modello attualmente attribuisce ad ogni muscolo.
Successive applicazioni o esigenze riabilitative potrebbero condurre alla modellazione cinematica e
dinamica del polso e dei relativi gradi di libertà per introdurre la possibilità di eseguire task
riabilitativi senza la presenza dell’ortesi per pazienti i cui deficit non precludano la capacità di
88
sostegno contro la gravità. Tale sviluppo consentirebbe la possibilità di riabilitare anche i muscoli
che muovono il polso e la mano. Si è inoltre osservato che, a seconda delle leggi di moto, può
risultare rilevante dell’attività di cocontrazione muscolare a carico dei muscoli antagonisti. Per la
valutazione dell’attività di cocontrazione, risulta utile la valutazione del segnale di feedback fornito
dell’EMG; in relazione alla legge di moto implementata, può risultare d’interesse la valutazione di
strategie riabilitative che coinvolgano una forte componente di cocontrazione per valutarne
l’efficacia rispetto a task motori più aderenti alla quotidianità dei movimenti.
89
8 - BIBLIOGRAFIA
Yongchul Kim, Chulhue Park, Youngil Youm, Sungchul Choi, Sungjun Han, Hanil Bae, Biomechanical
model of human-like arm for a crash test, 2003 Summer Bioengineering Conference.
Xiao Hu, Wendy Murray, Eric Perreault, Biomechanical constraints on the control of endpoint
stiffness, Rehabilitation Institute of Chicago, 2010
Pennestrì, Stefanelli, Valentini, Vita: Virtual muscolo-skeletal model for the biomechanical analysis
of the upper limb, Journal of Biomechanics 40, 2007
Hedenstierna, Halldin, Brolin, Development and evaluation of a continuum neck muscle model, 6th
European LS-DYNA Users’ Conference
Baltzopoulos, Brodie, Isokinetic Dynamometry, Sports Medicine 8, 1989
Reinhard Winfried Arthur Baildon, Nonlinear model of forearm supination, Simon Fraser
University, 1980
Shadmehr, Wise, A simple muscle model, Supplementary documents for “Computational
Neurobiology of Reaching and Pointing”
Menchi, I principali muscoli dell’arto superiore, D.T. Nazionale N.A.B.B.A. Italia, 1998
Duncan, Turner, Sacco, Hunter, Complex Motor Cortex Control of Muscle Synergies Underpin
Simple Reaching Tasks in Robot-Induced Force Fields, Rehabilitation Centre, School of Health and
Biosciences.
Venture, Yamane, Nakamura, Identification of human musculo-tendon subject specific dynamics
using musculo-skeletal computations and non linear least square, Department of mechanoinformatics, University of Tokyo, 2007.
Stelvio Beraldo, Principali movimenti del corpo e muscoli antagonisti, Sporttraining.it, 2005.
90
Xiuhui Fu, Hongyi Li, Yuechao Wang, Dynamic model of muscle force driving system and its
application in teleoperation, Shenyang Institute of Chemical Technology
Riener, Patient-driven control of FES-supported standing up: a simulation study, IEEE Transactions
on rehabilitation engineering, vol 6, n 2, june 1998.
Erdemir, McLean, Herzog, Van den Bogert, Model based estimation of muscle forces exerted
during movements, Clinical Biomechanics 22, 2007.
Cavallaro, Rosen, Perry, Burns, Hannaford, Hill-based model as a myoprocessor for a neural
controlled powered exoskeleton arm – parameters optimization, International Conference on
Robotics and Automation, Barcelona, Spain, 2005.
Klopcar, Tomsic, Lenarcic, A kinematic model of the shoulder complex to evaluate the armreachable workspace, Journal of biomechanics 40, 2007.
Abdullah, Tarry, Datta, Mittal, Abderrahim, Dynamic biomechanical model for assessing and
monitoring robot-assisted upper-limb therapy, Journal of Rehabilitation Research & Development
44, 2007.
Hingtgen, McGuire, Mei Wang, Harris, An upper extremity kinematic model for evaluation of
hemiparetic stroke, Journal of biomechanics 39, 2006.
Chadwick, Blana, van den Bogert, Kirsch, A real time 3D musculoskeletal model for dynamic
simulation of arm movements, IEEE Transactions on Biomedical Engineering, vol 56, 2009.
Kennedy, Modeling and Control of the Mitsubishi Pa-10 Robot Arm, 2007.
Winter, Anthropometric Parameters, Biomechanics and Motor control of human movements 2 nd,
University of Waterloo, Canada, 1992.
91
Crespo, Reinkensmeyer, Review of control strategies for robotic movement training after
neurologic injury, Journal of NeuroEngineering and Rehabilitation, 2009.
Vergaro et al., Self-adaptive robot training of stroke survivors for continuous tracking movements,
Journal of NeuroEngineering and Rehabilitation, 2010.
Nagasawa, Honda, Deevelopment of a spherical motor manipulated by four wires, Tokyo
Metropolitan Institute of Technology.
Giovanni Legnani, Robotica industriale, Zanichelli, 2003.
92
93