TEORIA DELLE RETI
Prof. Giancarlo Storti Gajani
[email protected] /3548
Leggi di Kirchoff
La teoria delle reti si occupa di simulazioni circuitali senza tener conto dei fenomeni fisici che
avvengono all'interno dei dispositivi. Esegue, insomma, predizioni quantitative e qualitative sui
circuiti adottando strumenti matematici.
L'approssimazione che si adotta è detta a parametri concetrati. E' possibile assumerla a patto che
d ≪c⋅Δt , dove d è la lunghezza di un filo di collegamento, c la velocità della luce e Δt il tempo
medio di propagazione del segnale. Se questa ipotesi è verificata, è possibile utilizzare, in luogo
delle equazioni di Maxwell, le ben più semplici leggi di Kirchoff. Non ci interessano, pertanto, le
dimensioni né le lunghezze dei fili.
Trasmissione istantanea del segnale
Circuito di esempio
–
Legge di Kirchoff alle tensioni: rappresenta il fatto che all'interno dl circuito è ben definito
il concetto di potenziale e consente di definire, nel circuito, le regioni equipotenziali o nodi.
E' espressa dall'equazione vij = ei – ej. Un altro modo per esprimere la LKT è il seguente: la
somma delle tensioni su una linea chiusa è sempre nulla (legge della maglia, con
espressione: ∑ v k=0 ;
k∈Γ
–
Legge di Kirchoff alle correnti: se si taglia il circuito con una superficie qualsiasi σ, la
somma delle correnti che attraversano σ è nulla ( ∑ i k =0 ). La stessa legge si può
k∈
esprimere considerando delle superfici che circondano i nodi (
∑ i j=0
j∈ N
);
Notiamo che adesso è possibile scrivere delle equazioni relative al circuito senza ancora saper nulla
sulle caratteristiche delle componenti. Tuttavia lo studio del circuito richiede la formalizzazione del
metodo di analisi.
N.B.: al momento non ci interessa cosa siano fisicamente tensione e corrente. Sono due grandezze
del circuito, e dire ciò è sufficiente.
N.B.: il verso della corrente e quello della tensione sono messi in relazione dalla cosiddetta
condizione normale (o degli utilizzatori).
Altre grandezza da definire è
p=v⋅i , la potenza entrante nel bipolo considerato.
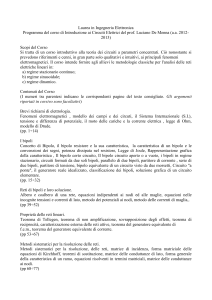
Grafi ed equazioni topologiche di circuiti
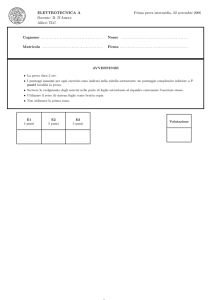
Riconsideriamo il circuito precedente e costruiamone il grafo associato.
2
B
A
3
5
1
D
6
C
4
E
E definiamone la matrice di incidenza (è una rappresentazione matriciale univoca del grafo,
realizzata secondo la convenzione: 1 il lato esce dal nodo; -1 il lato entra nel nodo; 0 non ci sono
relazioni tra lato e nodo. Le righe rappresentano i nodi, mentre le colonne rappresentano i lati).
∣
∣
1
1
0
0
0
0
0 −1 1
0
1
0
AC = 0
0 −1 1
0
0
−1 0
0
0
0 −1
0
0
0 −1 −1 1
E' detta matrice di incidenza completa. Tale matrice, per via delle leggi di Kirchoff stesse, non ha
rango massimo: esisterà una riga che è combinazione lineare delle altre. Consideriamo ad esempio
l'ultima riga, corrispondente al nodo E, che è combinazione lineare di A, B, C e D (tutte moltiplicate
per -1). Possiamo eliminare la riga E considerando il nodo corrispondente nodo di riferimento o
massa.
La matrice 4 x 6 così ottenuta scrive direttamente tutte le equazioni di Kirchoff alle correnti:
∣ ∣ ∣∣
i1
1
1
0
0
0
0 i
2
0
0 −1 1
0
1
0
i3 0
=
0
0 −1 1
0
0
i4 0
−1 0
0
0
0 −1
0
0
0
0 −1 −1 1 i 5
i6
∣
A⋅i=0
E' possibile ricavare, da queste espressioni matriciali, n – 1 equazioni, essendo n il numero dei
nodi del circuito.
Il grafo dovrebbe tuttavia sottendere anche le leggi di Kirchoff alle tensioni. La matrice da
considerare in questo caso è AT .
∣ ∣∣∣∣
1 0
0 −1
1 −1 0
0
0 1 −1 0
0 0
1
0
0 1
0
0
0 0
0 −1
v1
e1 v 2
e2 v 3
=
e3 v 4
e4 v5
v6
AT⋅e=v
In questo caso si ricavano l equazioni, essendo l il numero dei lati del circuito.
Abbiamo finora ricavato l + n – 1 equazioni senza neanche considerare le caratteristiche delle
singole componenti.
Ci si potrebbe anche chiedere quanto valga la somma di tutte le potenze. Calcoliamola:
∑ v k ik =v T⋅i
k
, ma v T =e T⋅A , dunque v T⋅i=e T⋅A⋅i .
Ma A⋅i=0 , dunque
∑ v k ik =v T⋅i=0
k
(teorema di Tellegen).
In conclusione:
a) Lo spazio delle tensioni e quello delle correnti sono equidimensionali e i vettori v ed i
ortogonali;
b) Abbiamo finora utilizzato solo le proprietà topologiche, senza dir nulla sulle componenti;
c) Tutte le leggi (e le loro derivate) valgono istante per istante, e ad istanti omogenei;
Non abbiamo ancora, però, scritto tutte le equazioni che il circuito consente di scrivere. Altre
equazioni ancora sono ricavabili considerando un albero del circuito:
•
Albero: sottografo connesso contenente tutti i nodi e privo di cicli;
Con n nodi nel grafo principale, si avranno n – 1 lati di albero. Gli l – n + 1 lati restanti sono detti
lati di coalbero.
N.B.: per il teorema di Kirchoff esiste un metodo per conoscere il massimo numero possibile di
alberi diversi scrivibile a partire da un grafo noto:
0
1
2
3
4
0
3
0
0
0
0
1
0
2
0
0
0
2
0
0
2
0
0
3
0
0
0
3
0
Matrice di grado:
matrice diagonale.
Elemento gii =
numero di nodi
collegati al nodo i
4
0 0
0 −1
0 2
0 3
2 4
0
0
1
0
1
1
1
1
0
1
0
0
2
0
1
0
1
0
3
1
0
1
0
1
4
1
0 =Matrice Laplaciana
0
1
0
Matrice di adiacenza:
1 se due nodi sono adiacenti
0 se non lo sono
Nessun nodo e adiacente a se stesso
Il determinante di un minore di ordine n – 1 della matrice Laplaciana è il numero di alberi
cercato.
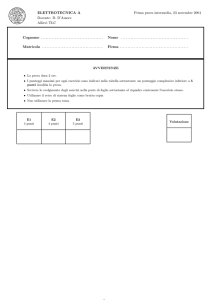
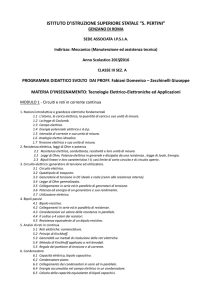
Adesso torniamo al grafo. Ordiniamo i suoi lati in modo da avere per primi quelli dell'albero
individuato:
C
c
3
D
2
d
e
b
B
1
4
f
a
A
I rami tratteggiati e in grassetto sono quelli scelti come rami di albero, mentre le linee rosse sono
le superfici di taglio, orientate secondo le frecce rosse. L'insieme di taglio è scelto in modo tale che
ciascuna superficie contenga uno e un solo lato di albero: questo consentirà di ottenere, come
vedremo, equazioni tutte linearmente indipendenti.
a
A 1
Q= B 0
C 0
D 0
b
0
1
0
0
c
0
0
1
0
d e
f
0 −1 0
0 1 −1
0 1
0
1 0 −1
La matrice Q è costruita nel seguente modo (righe → superfici di taglio, colonne → lati):
•
•
•
1: superficie di taglio concorde col lato;
0: superficie di taglio non tocca il lato;
-1: superficie di taglio non concorde col lato;
Per le leggi di Kirchoff potremo scrivere Q⋅i=0 , dove:
∣∣
ia
ib
i
i= c
id
ie
if
N.B.: la prima parte della matrice Q (prime quattro colonne) è la matrice identità del quarto ordine,
proprio per come sono stati numerati i lati e le superfici di taglio. In tal modo le correnti da i a a id
compariranno nelle equazioni una e una sola volta.
Analogamente (non andiamo a dimostrarlo) è possibile scrivere la matrice
sono le tensioni ai lati dell'albero.
v=QT⋅v alb , dove valb
Usando albero e coalbero si possono anche descrivere le maglie del circuito (ricordiamo che
aggiungendo un solo ramo di coalbero, si crea un ciclo nell'albero).
2
3
d
c
e
b
α
1
4
β
f
a
Scegliamo i versi delle maglie a seconda del verso del ramo di coalbero che le determina. E
scriviamo la seguente matrice:
a b
c d e f
B= 1 −1 −1 0 1 0
0 1
0 1 0 1
Ecco come determinare gli elementi della matrice B (colonne → lati del grafo, righe → maglie):
•
•
•
1: lato concorde al verso della maglia;
0: lato non appartenente alla maglia;
-1: lato non concorde al verso della maglia;
Varrà, per le leggi di Kirchoff, B⋅v l=0 dove vl è il vettore delle tensioni di lato. In definitiva
ecco le equazioni che descrivono il circuito:
{
i=B T⋅i coalbero
B⋅v l =0
{
v=Q T⋅v albero
Q⋅i=0
Le matrici B e Q hanno alcune utili proprietà:
∣
Q=∣1n−1 Q
B=∣B 1l−n1∣
T
Si può dimostrare che Q=−
BT . Infatti: 0=Qi=QB i coalb , pertanto considerando un circuito
“non spento” (correnti non nulle), Q BT =0 .
∣1 n−1
∣ ∣
T
∣ B = 0 , come volevasi dimostrare.
Q
1l −n1
Dunque alla fine quante equazioni mancano per risolvere il circuito? Cerchiamo di fare un conto
rapido sfruttando le equazioni che già abbiamo scritto:
Sistema
{
i=B T⋅i coalbero
B⋅v l =0
{
i=B T⋅i coalbero
v=Q T⋅v albero
Numero equazioni
{
l
l−n1
Tot :2l−n1
{
l
l
Tot :2l
Numero incognite
Equazioni mancanti
3l – n + 1
l
3l
l
Grafi non connessi e componenti con numero di poli diverso da 2
Se un grafo non è connesso, è possibile renderlo tale semplicemente scegliendo un nodo di
riferimento comune alle varie parti non connesse: risulta infatti evidente che la corrente nel ramo
aggiuntivo è nulla.
Per elementi diversi dai bipoli, occorre verificare la situazione caso per caso:
•
Elementi tripolari (e.g.: transistor)
Per la legge di Kirchoff alle tensioni, il terzo collegamento è superfluo, poiché la tensione ai capi
dell'eventuale terzo lato è dipendente dalle altre due.
•
Doppi bipoli:
In corrispondenza di ogni porta, la corrente che entra è sempre pari alla corrente che esce, e per
questo motivo è sufficiente considerare due soli lati sconnessi da incernierare in seguito secondo il
metodo prima presentato per i grafi sconnessi.
•
Altre componenti (più piedini, non doppi bipoli):
E' sufficiente utilizzare un grafo lagrangiano.
Bipoli resistivi
I bipoli resistivi non comprendono, nelle loro relazioni i – v, operatori differenziali. Avremo
dunque equazioni del tipo f(v,i) = 0, di tipo lineare o non lineare. Esistono anche casi particolari in
cui è possibile ottenere delle forme piuttosto semplici delle relazioni costitutive:
•
•
v = ρ(i) → bipolo resistivo controllato in corrente;
i = γ(v) → bipolo resistivo controllato in tensione;
Se le relazioni costitutive sono di natura semplicemente lineare, queste saranno del tipo
mv n i−u =0 . Questa equazione è detta relazione affine. Se u =0 , il bipolo è detto lineare.
Vediamo alcuni casi particolari e ben noti:
{
v=R i resistenza
i=G v conduttanza
v= E 0 generatore indipendente di tensione
i=A0 generatore indipendente di corrente
v=0 cortocircuito
i=0 circuito aperto
Casi più complessi sono descritti da equazioni del tipo Thevenin o Norton:
{
v= RiE 0 Thevenin
i=G vA0 Norton
Se è possibile ottenere una simile rappresentazione per ogni lato del circuito, le ultime l equazioni
necessarie a descrivere il circuito stesso accanto a quelle topologiche sono ottenibili con una
relazione matriciale del seguente tipo:
∣
∣ ∣∣
m1 0
0 ... 0
0 m2 0 ... 0
0 0 m3 ... 0
...
ml
∣∣∣∣
v 1 n1 0 0 ... 0
v 2 0 n2 0 ... 0
⋮ 0 0 n3 ... 0
vl
...
nl
i 1 u1
i 2 = u2
⋮ ⋮
i l ul
Metodi risolutivi per circuiti
Metodo della tabella sparsa (sparse tableau)
∣
l
l
l
∣ ∣∣ ∣ ∣
0 A
0
vl
T
1l 0 −A
il =
e n–1
M N
0
n–1
l
n–1
S
incognite
0
0
U0
termini noti
Alcune osservazioni sulla matrice S:
•
•
M e N hanno al massimo l elementi ciascuna poiché sono matrici diagonali, 1l ha
anch'essa l elementi, tutti unitari;
A (e quindi anche AT) contiene al massimo 2l elementi poiché ha al massimo 2 elementi
non nulli per colonna;
Queste considerazioni ci fanno comprendere che il metodo della matrice sparsa ben si presta alla
memorizzazione delle matrici sui calcolatori e alla soluzione del sistema Sx= U0 con metodi tipo
fattorizzazione.
N.B.: se la matrice S è di rango massimo e vengono spenti tutti i generatori (pongo ui = 0 ∀ i),
l'unica soluzione ammessa è quella banale. Se a generatori spenti è disponibile una soluzione
diversa dalla banale, il circuito è mal posto.
Se si attiva un solo generatore per volta, si può espandere il vettore colonna U0 nel seguente modo:
U 0=∑ u0k
k
Potremo esprimere la soluzione del circuito (il vettore x) alla luce di questa considerazione:
−1 k
x=S −1 ∑ u k0 x=∑ S
u0 =∑ x k
k
k
xk
k
Principio di sovrapposizione degli effetti
Analisi modale semplice
Osservando con attenzione il metodo sparse tableau, ci rendiamo conto che i risultati forniti sono
ridondanti (ad esempio noti i potenziali nodali è possibile ricavare le tensioni) e la complessità
computazionale è parecchio elevata (algoritmi di fattorizzazione tipo QR richiedono un numero di
operazioni nell'ordine di n3, e n spesso e volentieri raggiunge valori tipo 100, se non oltre).
A patto di assumere che la matrice N sia invertibile (il circuito deve dunque essere sempre
−1
i=−N
M v
N −1 U 0
risolvibile in i), possiamo scrivere, dalle relazioni costitutive, che
,
G
dunque
i=
G
Conduttanze
v U
0
Correnti
U0
. Ma le correnti devono soddisfare la LKC: moltiplichiamo a sinistra
per A entrambi i membri applicando la LKC: Ai =AGv AU 0=0 . Notiamo che in questo modo
abbiamo isolato le incognite tensioni (sono l, molto meno di 2l + n – 1).
Non abbiamo ancora usato la LKT (v = ATe):
AGAT e AU 0=0
Equazione dell'analisi nodale semplice (sistema di n – 1 equazioni)
N.B.: anche la matrice AGAT è abbastanza sparsa da giustificarne uno sviluppo in fattorizzazione.
Naturalmente non è possibile applicare l'analisi nodale a circuiti fatti da componenti qualsiasi.
Deve infatti esistere N-1. Ci possiamo chiedere quando tale matrice non esista. Osserviamo che:
•
Generatore di corrente: uno 0 nella matrice M, un 1 nella N e u0 nel vettore U0;
• Generatore di tensione: un 1 nella matrice M, uno 0 nella N e u0 nel vettore U0;
Ovviamente uno zero nella matrice N rende N non invertibile (perché N è diagonale, e uno zero
nella diagonale rende automaticamente il determinante nullo). Il metodo dell'analisi nodale
semplice non prevede la presenza di generatori di tensione non accompagnati.
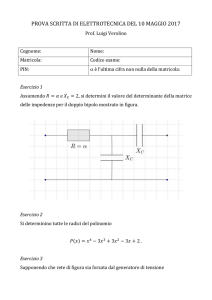
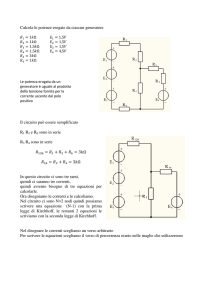
Esempio:
Proviamo a scrivere la matrice AGAT per il circuito in figura.
∣
g 1g 3 g 4
Y n=
−g 4
−g 3
∣
−g 4
−g 3
g 4 g 5 −g 5
−g 5
g 3 g 5
Gli elementi diagonali del tipo Yii mettono in evidenza quali conduttanze afferiscono ai nodi i,
mentre quelli extradiagonali del tipo Yij indicano la conduttanza vista tra il nodo i e il nodo j.
Detto questo, perché il sistema ammetta soluzioni, occorre che la matrice Yn sia non singolare. In
tal caso si avrebbe e =−Y −1
n AU 0 .
Nel nostro caso è sufficiente che Yn = AGAT sia definita positiva (resistori tutti positivi) e che i
generatori siano tutti accompagnati (ogni generatore di corrente deve avere una parte resistiva in
parallelo, come nella formulazione di Norton o formulazione parallelo).
0
N.B.: evidentemente il metodo dell'analisi
nodale pura non descrive, così com'è, capacità,
induttanze, elementi differenziali in genere. Queste vengono descritte introducendo le seguenti
funzioni:
q̇=i Condensatori : f v , q
̇=v
Induttori : f , q
{
Ed esiste un'altra categoria di componenti detti “memristori”, descritti da una f(φ,q).
Analisi modale modificata
Usando il metodo dell'analisi nodale pura eravamo costretti ad utilizzare solo generatori
indipendenti di corrente e generatori di corrente controllati in tensione. Occorre, naturalmente,
escogitare una strategia per inserire i generatori indipendenti di tensione e tutti gli altri generatori
controllati. Il problema, ad esempio, relativo ai generatori di tensione era l'impossibilità di
scrivere l'espressione della corrente che li attraversava (la loro relazione costitutiva è
indipendente dalla corrente). Si risolve questo problema introducendo la corrente come nuova
incognita e aggiungendo, come nuova equazione, la relazione costitutiva del generatore di
tensione.
Esempio:
i2
1
2
i1
BAD
BRANCH
i4
i3
Le equazioni del circuito sono le seguenti:
{
{
1) i 1+1 2=0
i 1= g 1 e1
2)−i 2+i 4 =0 → i 2=g 2 ( e1−e 2)
3) i 3 +i 4=0
i 3= g 3 e3
da cui deriva la matrice dell'analisi modale modificata:
e2
e3 i4
e1
1 g 1+g 2 −g 2 0
0 e1 0
g 2 0 −1 e 2 0
2 −g 2
=
0
0
g3 1 e3 0
3
E
0
−1 1 0 i 4 E 0
0
∣
∣ ∣∣ ∣
3 3
Doppi bipoli
Prima di definire i doppi bipoli e vedere come trattarli, introduciamo il concetto di porta. Una porta
è una coppia di morsetti tale che la corrente che entra in un piedino è uguale a quella che esce
dall'altro.
•
Porta propria: una porta propria individua, all'interno dell'n-polo, una reale rete che
connette un morsetto all'altro, giustificando “propriamente” la definizione;
•
Porta impropria: non esiste una situazione come quella descritta in figura, ma il modo in
cui i morsetti sono interconnessi giustifica la definizione (la coppia di morsetti si comporta
da porta);
Se un n-polo è costituito da 2k piedini ed è possibile raggrupparli in k porte, facciamo l'ipotesi che
esistano k equazioni che mettano in relazione vk e ik.
N.B.: anche il semplice bipolo può essere considerato una porta (in inglese il bipolo si chiama “one
port). Possono essere definiti anche due bipoli speciali che violano l'ultima proprietà definita (quella
delle k equazioni). In totale, se 2k = 2 e quindi k = 1, dovremmo avere una singola relazione.
Tuttavia:
i
Impone 2
Nullatore relazioni:
v
∞
0
v
i
Noratore Impone 0
relazioni
v=0
i=0
La soluzione a questo problema è semplice: quando si usa uno di questi due bipoli speciali
bisognerà usare anche l'altro, in modo che la “perdita” del noratore sia compensata dall'eccesso del
nullatore (ad esempio è il caso dell'OPAMP in regione lineare, che ha un nullatore in ingresso ed un
noratore in uscita). Passiamo ad osservare effettivamente i doppi bipoli:
i1
v1
i2
v2
{
f 1 v 1, i 1, v 2, i 2=0
f 2 v 1, i 1, v 2, i 2
Nel caso lineare o affine, le equazioni saranno del tipo Mv + Ni = U 0, dove M ed N sono matrici
2x2, v ed i sono i vettori delle tensioni e delle correnti e U 0 è il vettore dei termini noti, le cui
dimensioni (unità di misura) dipendono dalla modalità di rappresentazione del doppio bipolo. Per il
momento consideriamo doppi bipoli lineari (U0 = 0).
In teoria esisterebbero infinite rappresentazioni implicite del doppio bipolo (basta moltiplicare
l'equazione matriciale caratteristica per una generica matrice A non singolare). Esistono tuttavia sei
rappresentazioni “rilevanti” che è il caso di analizzare:
∣∣∣
∣∣ ∣
∣∣
∣∣
v 1 r 11 r 12 i 1
=
v 2 r 21 r 22 i 2
•
Rappresentazione R:
•
Rappresentazione G:
•
Rappresentazione ibrida 1:
•
Rappresentazione ibrida 2:
•
Rappresentazione di trasmissione 1:
•
Rappresentazione di trasmissione 2:
i 1 g 11 g 12 v 1
=
i 2 g 21 g 22 v 2
∣∣∣
∣∣∣
∣∣
∣∣
∣∣∣ ∣ ∣
∣ ∣∣ ∣ ∣
v 1 h11 h12 i 1
=
i 2 h21 h22 v 2
i 1 h 11 '
=
v 2 h 21 '
h12 ' v 1
h22 ' i 2
v 1 t 11 t 12 v 2
=
i 1 t 21 t 22 −i 2
v 2 t 11 '
=
−i 2 t 21 '
t 12 ' v 1
t 22 ' i 1
Elementi passivi/attivi
Non passivo
i
Strettamente
passivo
Passivo
v
Passivo
Strettamente
passivo
Non passivo
Circa i doppi bipoli, la condizione di passività è verificata qualora v 1 i 1+v 2 i 2>0 . In termini dei
vettori delle tensioni e delle correnti, v T i>0 . Ma i=Gv , pertanto v T G v >0 .
Quest'ultima relazione è detta forma quadratica, vediamo perché:
∣v 1
∣
v 2∣
∣∣
∣∣
g 11 g 12 v 1
v
=∣g 11 v 1+g 21 v 2 g 12 v 1+g 12 v 2∣ 1 = g 11 v 21 +g 21 v 1 v 2+g 12 v 1 v 2+g 22 v 22
g 21 g 22 v 2
v2
Se, dunque, questa quantità è maggiore di zero, il doppio bipolo è passivo. Se, dunque, G è definita
positiva, la forma quadratica è maggiore di zero ∀ v .
Una matrice è definita positiva se ha autovalori reali e positivi, ma una matrice ha autovalori reali
solo se è simmetrica. Consideriamo la decomposizione cartesiana di G:
G=
G+G T G−G T
+
, intendendo con GS e GA rispettivamente “G simmetrica” e “G
2
2
⏟
⏟
GS
GA
∣
antisimmetrica”. Infatti: G S =
g 11
g 12+g 21
2
∣ ∣
g 12 +g 21
2
g 22
e G A=
0
g 12−g 21
2
g 21−g 12
2
Per qualsiasi vettore x, vale che: x T G x=x T G S x+ x T G A x=x T G S x
nullo. Ne traiamo una conclusione importante:
0
∣
.
perché il contributo di GA è
{
1) Elementi diagonali positivi → G definita positiva
2) Determinante positivo
Considerando bipoli e doppi bipoli compositi, se le componenti sono tutte passive, la risultante è
passiva, ma se la risultante è passiva non è detto che le componenti lo siano.
Reciprocità di doppi bipoli
Introduciamo anzitutto il concetto di potenza virtuale incrociata. Per farlo consideriamo un doppio
bipolo e due suoi possibili punti di lavoro (v1',v2';i1',i2') e (v1'',v2'';i1'',i2''),
i1
i2
v1
v2
Le potenze virtuali incrociate sono le due seguenti quantità:
p ' =v 1 ' i 1 ' '+v 2 ' i 2 ' ' =v ' T i ' '
p ' '=v 1 ' ' i 1 '+v 2 ' ' i 2 '=v ' ' T i ' '
Il doppio bipolo si dice reciproco se p' = p'' per ogni coppia di punti di lavoro scelta.
•
Reciprocità nelle rappresentazioni R e G:
v '=Ri ' → p' =v ' T i ' ' =(Ri ')T i ' '=i ' T RT i' '
◦
. Notare che le forme quadratiche
v ' ' =Ri ' ' → p ' ' =v ' ' T i '=(Ri ' ' )T i ' =i ' ' T RT i '
ottenute alla fine dei calcoli sono degli scalari, quindi evidentemente uguali alla loro
trasposta: p ' '=i ' ' T RT i '=i ' T R i ' ' . Quest'ultima quantità è uguale a p' solo se
R= RT . Il caso G porta a risultati identici poiché duale.
•
Reciprocità nelle rappresentazioni ibride:
◦ In questo caso i calcoli saranno più impegnativi, poiché non abbiamo le espressioni
esplicite dei vettori i e v l'uno in funzione dell'altro, ma abbiamo:
∣∣∣
∣∣
v 1 h11 h12 i 1
=
.
i 2 h21 h22 v 2
p '=h 11 i 1 ' i 1 ' '+h12 v 2 ' i 1 ' '+h21 v 2 ' i 1 ' '+h22 v 2 ' v 2 ' '
. Sottraendo un'espressione
p ' '=h11 i 1 ' i 1 ' ' +h12 v 2 ' ' i 1 ' +h 21 v 2 ' ' i 1 ' +h 22 v 2 ' v 2 ' '
dell'altra
e
imponendo
che
la
differenza
sia
nulla
otteniamo:
p ' − p ' ' =h 12 v 2 ' i 1 ' ' +h 21 v 2 ' i 1 ' ' −h12 v 2 ' ' i 1 '−h21 v 2 ' ' i 1 '=0 .
Dunque (h 12+h 21) v 2 ' i 1 ' ' =(h 12+h21 ) v 2 ' ' i 1 ' . Questa relazione deve valere per ogni
punto di lavoro possibile. Dev'essere dunque h12=−h21 .
Simmetria di doppi bipoli
Un doppio bipolo si dicono simmetrici se è possibile scambiare le due porte tra loro senza
modificare il comportamento del doppio bipolo stesso. In tutti i casi la simmetria del doppio
bipolo implica la sua reciprocità.
•
Simmetria nelle rappresentazioni R e G:
{
v 1=r 11 i 1+r 12 i 2
v 2=r 21 i 1+r 22 i 2
◦ Se il doppio bipolo è simmetrico,
Questo vale solo se
•
equivale a
{
v 2=r 11 i 2+r 12 i 1
.
v 1=r 21 i 2+r 22 i 1
{
r 11=r 22
.
r 12=r 21
Simmetria nelle rappresentazioni ibride:
v 1 h11 h12 i 1
=
◦ Se il doppio bipolo è simmetrico,
i 2 h21 h22 v 2
∣∣∣
∣∣
∣∣∣ ∣ ∣
∣∣ ∣∣
∣
∣
v 2 h 11 h 12 i 2
=
i 1 h 21 h 22 v 1
v1
i
=H 1 . E'
In questo caso utilizziamo la più comoda rappresentazione vettoriale:
i2
v2
facile osservare che la condizione di simmetria per un doppio bipolo in rappresentazione
1
h 11 −h 21
−1
=H solo se
ibrida è H = H −1 . Approfondiamo: H =
h11 h22−h12 h21 −h12 h22
det ( H )=1
. Naturalmente anche qui la simmetria implica la reciprocità.
h12=−h21
equivale a
{
{
h11=h22 =0
. Si tratta dell'unico doppio bipolo
h 12=h 21=±1
Un caso molto particolare è
simmetrico ma non reciproco.
Unidirezionalità di doppi bipoli
Un doppio bipolo è detto unidirezionale qualora ciò che accade in ciascuna porta non influenza ciò
che accade nell'altra. Ad esempio, nella rappresentazione a parametri resistivi, si avrà
r21 = 0: unidirezionalità
della porta 2 verso la 1
{
v 1=v11 i 1+r 12 i 2
v 2=r 21 i 1+r 22 i 2
r12 = 0: unidirezionalità
della porta 1 verso la 2
Generatori pilotati
•
Generatore di corrente pilotato in tensione (VCCS):
i 1=0
0 0
G=
◦
Gm 0
i 2 =Gm v 1
{
∣ ∣
vc
v1
•
Generatore di tensione pilotato in corrente (CCVS):
v 1=0
R= 0 0
◦
i1=ic
Rm 0
v 2=Rm i 1
v1
{
•
Gmvc
∣ ∣
i2
Rmic +
-
Generatore di tensione pilotato in tensione (VCVS):
i 1=0
H ' '= 0 0
◦
αV 0
v 2=α v 1
{
∣ ∣
v1
•
i2
vc
i2
αVvc +
-
Generatore di corrente pilotato in corrente (CCCS):
v 1=0
0 0
H '=
◦
i1=ic
αI 0
i 2 =α I i 1
{
∣ ∣
v1
i2
αIic
N.B.: le matrici di trasmissione T esistono sempre, ma non le T', dato che tutte le rappresentazioni
hanno sempre e solo un elemento diverso da zero.
Interconnessioni tra doppi bipoli
I doppi bipoli sono caratterizzati da due porte, dunque esistono diverse modalità per
interconnetterli, ognuna dotata di una specifica connessione delle porte 1 e 2.
•
Connessione serie – serie: la corrente della porta 1 del primo doppio bipolo è la stessa della
porta 1 del secondo, e lo stesso vale per le porte 2. La rappresentazione più utile per
calcolare il doppio bipolo risultante è la rappresentazione R.
R1
R2
•
Connessione parallelo – parallelo: la porta 1 del primo doppio bipolo è soggetta alla stessa
tensione della porta 1 del secondo, e lo stesso accade per le porte 2. La rappresentazione più
utile per calcolare il doppio bipolo risultante è la rappresentazione G.
G1
G2
•
Connessione serie – parallelo: la corrente della porta 1 del primo doppio bipolo è la stessa
della porta 1 del secondo, mentre le porte 2 hanno in comune la tensione (rappr. H').
H1'
H2'
Connessione parallelo – serie: la porta 1 del primo doppio bipolo è soggetta alla stessa
tensione della porta 1 del secondo, mentre le porte 2 hanno in comune la corrente (rapp. H'');
•
H1''
H2''
Connessione in cascata: è una connessione esclusiva dei doppi bipoli, e consiste nel far
coincidere la porta 2 del primo doppio bipolo con la porta 1 del secondo (rappresentazione
T);
•
D1
D2
Condizione sufficiente perché si possano eseguire i collegamenti indicati preservando la
sommabilità dei parametri (come nel caso dei singoli bipoli) è la validità del test di Brune.
Si fa il collegamento della porta 1;
Si mette il generatore opportuno alla porta 1 (se sono collegate in serie ci vuole un
generatore di corrente, di tensione se sono collegate in parallelo);
Le porte 2 si devono porre aperte o in corto circuito a seconda della configurazione
esaminata (aperte per serie, chiuse per parallelo);
Si calcola la tensione V;
Se la tensione è V = 0, allora vale la sommabilità dei parametri;
•
•
•
•
•
Lo dimostra il seguente circuito d'esempio:
1
VV
2
∣ 12∣
∣ 12∣
=∣3,5 1 ∣
1 3,5
R 1= 2
1
R2= 2
1
RTOT
E' evidente che non vale la sommabilità dei parametri, perché ponendo un generatore di corrente tra
i nodi 1 e 2, la tensione V non è affatto nulla lasciando aperta la parte di circuito tratteggiata (è pari
alla corrente imposta dal generatore di corrente moltiplicata per la resistenza in basso a sinistra,
poiché la resistenza in basso a destra è scollegata).
N.B.: piccolo approfondimento sulla matrice risultante di due doppi bipoli collegati in cascata.
Useremo, come già indicato, la rappresentazione T (vedere la figura per dettagli su quali correnti e
tensioni si stanno indicando).
∣∣ ∣ ∣
∣∣ ∣ ∣
∣ ∣∣∣
v1
v
v3
v
v2 v3
=T 1 2
=T 2 4 . Ma
=
e
, dunque
i1
−i 2
i3
−i 4
−i 2 i 3
matrice di trasmissione risultante è T =T 1 T 2 .
∣∣
Generatori pilotati in analisi nodale modificata
•
Generatore di tensione pilotato in tensione
I 1=0
◦
da cui deriva e N −e N −α V e N +αV e N =0 ;
V 2=αV V C
{
+
-
+
C
C
i2
NC+
v1
N-
NCN+
N+
N+C
N-C
N-
∣
N+C
N-C
GN
… +1 −α V +α V
•
N-
∣ ∣∣
⋮ e1
⋮
+1 ⋮
⋮
0 ⋮
=⋮
⋮
0 ⋮
−1 e N −1 ⋮
0
−1 0 I 2
Generatore di corrente pilotato in tensione
I 1=0
◦
da cui deriva I 2=G m (e N −e N ) ;
I 2=G m V C
{
+
NC+
NC
-
-
i2
i1
vc
v1
N+
αVvc +
-
vc
N+
Gmvc
N-
∣ ∣
v1
v
=T 1 T 2 4 , pertanto la
i1
−i 4
•
Generatore di tensione pilotato in corrente
e N −e N −R m I 2=0
V 1=0
◦
da cui derivano
; in questo caso introdurremo
e N −e N =0
V 2=Rm I 1
{
{
+
-
+
C
C
dunque due nuove incognite anziché una sola;
NC+
i2
i1=ic
v1
N+
Rmic +
N-
NC-
∣ ∣∣
∣
0
0
+1
0
GN
0 +1
0 −1
−1
0
0 +1 0
0 −1 0 −Rm
0 0 +1 −1 0
0
0
•
⋮
eN
eN
⋮
⋮
⋮
=
eN ⋮
eN ⋮
0
I2
0
I1
+
+
C
C
-
Generatore di corrente pilotato in corrente
I 2−α I I 1=0
V 1=0
◦
da cui derivano
e N −e N =0 ; anche in questo caso introdurremo due
I 2=α I I 1
{
{
+
C
C
nuove incognite;
i2
i1=ic
v1
∣
αIic
∣ ∣∣
0
0
+1
0
GN
0 +1
0 −1
−1
0
0 0 0
0 0 1 −α I
0 0 +1 −1 0 0
0
⋮
⋮
eN
⋮
eN ⋮
eN = ⋮
eN ⋮
I2 0
0
I1
+
+
C
C
-
Doppi bipoli lineari notevoli e loro rappresentazioni matriciali
•
i1
Trasformatore ideale
◦ Rappresentazione H':
{
◦ Rappresentazione T:
{
[
v 1=K v 2
→
i 2 =−K i 1
H '=
0
−K
K
0
]
K:1
v1
[ ]
v 1=K v 2
K
0
1
→ T=
1
0 −
i 1=− i 2
K
K
N.B.: un trasformatore ideale equivale ad una coppia di generatori pilotati così collegati:
i1
v1
•
i2
+
-
KV2
-KI1
v2
Positive impedance converter
[
H '= 0 K
−K 0
K 0
1
◦ Rappresentazione T': T ' =
0
K
◦ Rappresentazione H':
]
[ ]
•
Negative impedance converter
◦ Rappresentazione H':
•
[
H ' = 0 −K
−K
0
Positive inpedance inverter (giratore)
0
Rm
◦ Rappresentazione R: R=
−Rm 0
[
]
]
◦ Se colleghiamo in uscita una resistenza R (o
un generico circuito con resistenza
d'ingressso R), possiamo calcolare la
resistenza
d'ingresso
del
giratore:
v2
v 1=R m i 2 , ma
, dunque
i 2=−
R
Rm
v 1=−
v . Dalla relazione costitutiva
R 2
R2
abbiamo v 2 =−R m i 1 , pertanto v 1= m i 1 e infine
R
Rin =
v1 R2m
=
i1 R
i2
v2
◦ Connettendo invece un induttore alla porta di uscita:
iL
Ricordiamo che la tensione sull'induttore è
v L (t)=L
di L (t)
=L i˙L . Nel nostro caso
dt
1
v , dalla relazione costitutiva del giratore. Sostituendo
Rm 1
L
L
otteniamo v 2 =− v˙1 e infine, dato che v 2 =−R m i 1 , si ha i 1= 2 v˙1 , che è l'equazione
Rm
Rm
L
caratteristica di un condensatore di capacità C= 2 .
Rm
Questo ci fa capire che il giratore è utile per realizzare condensatori utilizzando induttori e
viceversa.
v L =v 2= L i˙L
dove
i L =−i 2=−
Altra osservazione importante riguarda l'utilizzo di due giratori in cascata. Notiamo anzitutto che il
giratore è un doppio bipolo non reciproco ( r 12≠r 21 ).
i1
i2
α
v1
{
v 1=α i 2
è posto in cascata a
v 2=−α i 1
con la coppia (v4,i1):
i3
v 2 = v3
{
β
i4
v4
v 3=βi 4
. Proviamo a mettere in relazione la coppia (v1,i4)
v 4=−β i 3
v 1=α i 2=−α i 3= α v 4
β
. Dunque la cascata di due giratori di parametri α e β rispettivamente è un
1
1
i 4 = v 3= v 2=− α i 1
β
β
β
α
trasformatore ideale di parametro K = β .
•
Negative impedance inverter
◦ Del tutto analogo al giratore, ma con matrice R del tipo
R=
[
0
±Rm
±Rm
0
]
;
Esempio: realizzazione di un NIC con OPAMP
R1
v1
R2
v2
Calcoliamo la matrice H del circuito. Ricordando che la rappresentazione H è del tipo
v 1=h11 i 1 +h12 v 2
, ci toccherà azzerare v2 e i1 per calcolare una coppia di parametri per volta.
i 2=h 21 i 1+h22 v 2
{
v1
=0
i1
i 2 R1
h 21= =
i1 R2
h11=
v 2 =0
v1
=1
v2
i2
h 22= =0
v2
h12=
i 1=0
Il circuito in figura è un NIC ideale se R1 = R2 (altrimenti gli elementi extradiagonali della matrice
H non sarebbero uguali).
Elementi non lineari
Nella stragrande maggioranza dei circuiti elettronici si fa uso di elementi in generale non lineari
(diodi, transistors, ecc...). Fino ad ora non abbiamo contemplato la possibilità di inserirli nei nostri
circuiti. Vediamo anzitutto come queste componenti si descrivono e in seguito capiremo come
introdurli nei metodi di analisi circuitale.
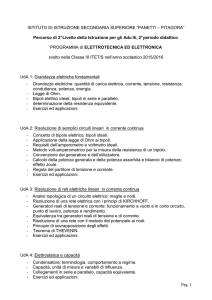
Punto di lavoro di un elemento non lineare
-id
id
-Rid
vd
vd
vth
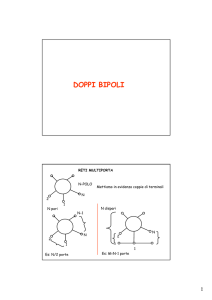
La relazione costitutiva del diodo è
i d =I S (e −1) . In figura
è mostrato un diodo collegato ad un generico circuito alla
Thevenin, con generatore di tensione E0 e resistenza R. Il punto
di lavoro (DC) di questo circuito è dato dall'intersezione della
caratteristica del diodo con la cosiddetta retta di carico.
N.B.: le considerazioni che stiamo facendo valgono per il diodo
e per qualsiasi elemento a caratteristica non lineare.
Dalla LKT applicata alla maglia intera otteniamo
sostituendo l'espressione di id si ha:
v d =E 0−Ri d , la retta di carico. Da cui,
vd
v th
v d +RI S (e −1)−E 0=0
E' un'equazione trascendente del tipo f (v d )=0 , risolvibile numericamente. Risolvere tale
equazione equivale a cercare l'intersezione tra la caratteristica del diodo e la retta di carico:
id
E0/R
SOLUZIONE
E0
vd
N.B.: a seconda della loro equazione caratteristica, in generale i circuiti non lineari possono avere
più di un punto di lavoro, mentre i simulatori ne trovano uno solo per volta.
Un possibile metodo ad approssimazioni successive per la ricerca del punto di lavoro è noto come
metodo di Newton. Si parte da un punto x0 arbitrario e si considera l'intersezione della retta tangente
a f(x) in x0 con l'asse delle ascisse:
x0
x1
x2
La prima tangente avrà equazione y− f ( x 0 )= f ' ( x 0 )( x−x 0 ) . A noi interessa il punto x1 tale che
f ( x 0)
y=0 . Dunque si avrà, ponendo x= x1 e y=0 : x 1=x 0 −
. Al passo di iterazione
f ' (x 0 )
n-esimo si avrà:
x n+1= x n −
f ( x n)
f '( x n )
o, equivalentemente,
f ' ( x n )( x n+1− x n )=− f (x n )
Questo metodo può essere esteso anche a funzioni di più variabili e vettori di funzioni di più
variabili. Si consideri ad esempio il caso di un doppio bipolo non lineare caratterizzato da due
v 1= f 1( i 1, i 2)
equazioni non lineari del tipo
. Se alle due porte del doppio bipolo è possibile
v 2= f 2 (i 1, i 2 )
{
definire gli equivalenti di Thevenin, si ha una situazione del tipo
{
g1 (i1, i 2)
f 1 (i 1, i 2 )−E 1+R1 i 1=0
⏞
f 2 (i 1, i 2)− E 2+R2 i 2=0
⏟
.
g2 (i1, i 2)
L'estensione della derivata al caso di vettori di funzioni a più variabili è lo Jacobiano. Considerando
la seconda forma del metodo di Newton, al passo n-esimo avremo:
(∣
( n+1)
∣) ∣
(n)
( n)
(n)
∣
i
−i
g (i ,i 2 )
J (i ,i ) (1n+1) 1(n) =− 1 1(n) (n)
i 2 −i 2
g 2 (i 1 , i 2 )
(n)
1
(n)
2
Ricordando che
∣ ∣
∂ g1
∂i
J= 1
∂ g2
∂i 1
∂ g1
∂i 2
∂ g2
∂i 2
ad ogni iterazione.
N.B.: per utilizzare il metodo di Newton compatibilmente con la MNA è necessario linearizzare le
equazioni non lineari. Ciò significa che si sceglie immediatamente un punto di lavoro iniziale tipo
V0 e si linearizza la funzione non lineare attorno a tale punto (se ne calcola, insomma, la tangente e
si inizia ad iterare!). L'iterazione non fa che moltiplicare il costo computazionale del metodo per il
numero di iterazioni. Il fattore di moltiplicazione varia a seconda dei casi: la convergenza si
considera raggiunta quando ∣∣x∣∣<ϵ , con ϵ scelto arbitrariamente.
Proprietà di monotonia
Per bipoli monotoni, se esiste una soluzione questa è unica.
Il tempo come variabile fondamentale
Per introdurre il tempo come variabile fondamentale dell'analisi dei circuiti (e studiare quindi i loro
transitori e il loro comportamento sui piccoli segnali), riprendiamo le grandezze “carica” e “flusso”
e vediamo in che modo metterle in relazione:
v=Ri
v
i
q=Cv
Φ=Li
q
ϕ
Φ=Mq
Sfruttando le proprietà di carica e flusso
(
q̇=i
ϕ̇=v
possiamo ricavare relazioni costitutive tutte in
termini di corrente e tensione:
{
v= Ri → Resistore
i=C v̇ → Condensatore
v=L i̇ → Induttore
Gli elementi dinamici (o “dotati di memoria”) sono in grado di immagazzinare energia. Per valutare
questa grandezza è sufficiente calcolare l'integrale di
t
Per un condensatore lineare, ad esempio:
P=v⋅i .
v (t )
t
∫ v⋅i dt=C∫ v dvdt dt=C ∫ v dv = 12 C v
E=
0
0
2
0
Dunque l'energia di un condensatore lineare dipende esclusivamente dagli stati di tensione in cui
quest'ultimo si trova.
i
A
B
v