IL SERVOCOMANDO
PREMESSA
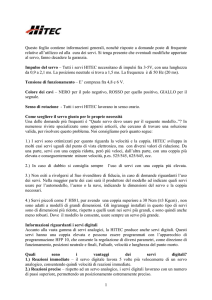
I servocomandi per modellismo quelli che “vanno di forza” ovvero sono delle piccole scatolette di plastica con un motorino
elettrico all’interno che muovono fisicamente le parti mobili del modello , come alettoni , timone , elevatore ecc. ecc. Prendono
il segnale dalla ricevente e a seconda del segnale si muovono con una certa forza , direzione e velocitá. Sul servo è montata
una piccola squadretta di plastica che è collegata tramite delle astine di acciaio ad un'altra squadretta che è però situata sulla
parte da muovere. In questo modo trasmette il movimento fino alla parte interessata. I servi generalmente non sono in
dotazione insieme alla radio, e se ci sono ne troverete uno o due, quindi in generale sono una spesa a parte. I servocomandi
contengono, in un unico contenitore, un motorino con relativo riduttore a ingranaggi, un circuito elettronico di controllo e un
potenziometro per il controllo della posizione. Solitamente sono alimentati a 5V (i pacchi batterie per modellismo sono da
4.8V) ma in alcuni casi possono funzionare anche a 6 o 7V. Sulla confezione c'è scritta la forza torcente (torque) a 4.8 e/o 6V
(la forza si intende applicata a un centimetro di distanza dall'asse). Un servocomando da 3.5Kg*cm genera una forza
massima di 3.5Kg alla distanza di 1 cm, 0.35Kg alla distanza di 10cm ecc. Solitamente le dimensioni dei servi sono "standard".
Vedi dettaglio.
COME SI COLLEGANO ALLA RICEVENTE?
Si collegano alla ricevente con uno spinotto a tre fili, il centrale è rosso (positivo) uno degli estremi è nero o marrone ed è il
(negativo), e l'altro estremo può essere bianco giallo o arancione ed è il filo di segnale o comando. Su questo filo vanno
applicati degli impulsi positivi di 5V di durata compresa tra 1 e 2 mS (millisecondi). A seconda della durata dell' impulso il
perno ruota in una posizione ben precisa (per raggiungere la posizione non basta un solo impulso, ma ne devono essere inviati
un certo numero in sequenza). La durata minima e massima dell' impulso varia leggermente da un modello all'altro,
indicativamente 1,5 mS è il valore per la posizione centrale, 1mS è il servo ruotato tutto da un lato, 2mS è il servo ruotato
tutto dall' altra (alcuni servi accettano anche meno di 1ms o più di 2mS). L' escursione garantita è di 120 gradi, ma in pratica
tutti i servi dovrebbero arrivare ai 180 gradi. Se si tenta di comandare il servo con impulsi più brevi o più lunghi di di quelli
consentiti il perno raggiunge la massima rotazione e si arresta per la presenza di un blocco meccanico interno, in questa
condizione il motorino va sotto sforzo, il servo ronza udibilmente, scalda ed assorbe molta corrente (oltre 0,5A).
Tra un impulso e l' altro non deve esserci una pausa inferiore a 10mS, altrimenti il circuito interno del servo può perdere la
propria temporizzazione. Tra un impulso e l' altro possono passare anche diverse decine di mS, però più gli impulsi sono
distanti tra loro e meno forza il servo riesce ad applicare (lo si sente vibrare alla frequenza degli impulsi e il controllo diventa
lento, "cedevole" e poco preciso). Anche se in figura è riportato il valore max 40mS sarebbe meglio stare più vicini ai 20mS
(frequenza di impulsi di 50Hz). Gli impulsi possono essere prelevati da una qualsiasi porta logica in quanto l'ingresso del servo
è ad alta impedenza.
Una piccola variazione nella durata dell'impulso positivo produce una piccola variazione della posizione del perno del servo,
invece una variazione anche di molti mS della pausa tra un impulso e l' altro non produce nessun effetto collaterale. Questo
significa che è assolutamente importante la precisione dell' impulso positivo, mentre le pause possono anche variare in
continuazione senza problemi. Inoltre, se si vuole che il servo mantenga la posizione (soprattutto se è sotto sforzo) gli impulsi
devono essere inviati in continuazione.
VEDIAMO COME SONO FATTI DENTRO
Ora cerchiamo di fare un po di chiarezza sul contenuto del servocomando, analizzando un passo alla volta diamo un piccolo
sguardo alle varie componenti che lo compongono:
aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa
aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa
Esterno Servocomado
Rimozione Tappo Inferiore
Dettaglio Ingranaggi
Dettaglio Tappo Superiore
Dettaglio Ingranaggi (1)
Dettaglio Ingranaggi (2)
Dettaglio Gruppo Riduzione
Dettaglio Gruppo Riduzione
Dotazione Servo
LE SQUADRETTE
Le squadrette che solitamente utilizziamo sono realizzate in plastica "abs", materiale molto morbido e sopratutto resistente
agli urti ed alle sollecitazioni che i nostri modelli inevitabilmente producono in movimento. Come potete notare dalla tabella in
basso abbiamo a nostra disposizione un vasto assortimenti di forme e misure, utili nei più disparati casi: auto,truck,navi,volo
ecc. ecc.
GLI SPINOTTI
Il problema della polarità nelle spinette, siano esse di connessione, prolunghe o di ricarica si presenta spesso ai modellisti che
hanno diversi impianti radio in officina, ma si presenta anche a chi voglia per esempio acquistare un caricabatterie o un altro
accessorio e non abbia chiara la polarità da utilizzare. Problema che in alcuni casi può rivelarsi con danni piuttosto costosi
come servi o riceventi bruciate. Ecco quindi un sintetico promemoria che potrà aiutare i modellisti ad orientarsi nella ricerca
della corretta polarità:
INSTALLAZIONE DEL SERVO
Il servo per funzionare deve essere adeguatamente fissato truck utilizzando le apposite staffe e assicurarsi che non si
muovano eccessivamente. Sul servo è montata una "squadretta" che non è una piccola squadra di calcio, ma un pezzettino di
plastica o alluminio a forma di cerchio, L, X, + o altro. Questa squadretta ha dei buchi, su cui si fissa un "tirante", ovvero un
astina di acciaio. Questa astina è da un capo fissata al servo, e all'altro capo è fissata ad un'altra squadretta che però è
attaccata alla parte da muovere. La figura seguente chiarirà ogni dubbio.
TRATTAMENTO DEI SERVI
I servocomandi possono subire un trattamento più semplice e veloce, sigillando tutti i bordi e le viti con colla a contatto. Per il
fissaggio usate il kit di serraggio a corredo, compresi i gommini e le boccole che attutiscono i colpi e le vibrazioni, viti o con
fascette usa e getta da elettricista avendo cura di usare gli appositi gommini e boccole metalliche forniti con gli stessi. Tutti i
fili vanno fissati in modo sicuro alla piastra e non lasciati vaganti per evitare che si incastrino su cardani o cinghie o che si
infilino fra i denti della corona e del pignone. Inoltre e consigliato di rivestirli con del termoretrattile e di non fissarli a supporti
metallici non isolati per evitare che un'imperfezione del rivestimento dei cavi possa creare un cortocircuito o fare "massa".
Anche l'antenna va distesa il più possibile e soprattutto non va tagliata per evitare di ridurre la portata del TX. Nel caso fosse
troppo lunga bisogna avvolgere la parte in eccesso, in modo ordinato attorno ad un pezzetto di plastica o comunque di
materiale isolante. Si ricorda inoltre per una maggiore protezione di sigillare tutte le spinette con pasta rossa o colla a contatto
e di inserire delle piccole prolunghe sulla ricevente per evitare di dover tagliare tutto l'imballaggio per sostituire un servo.
I SERVI DIGITALI E ANALOGICI
Esistono due tipi di servi, digitali ed analogici. Si distinguono molto anche per il prezzo che nel caso dei servi digitali è
notevolmente maggiore. Le differenze sono che i servi digitali hanno maggiore velocità rispetto ai servi analogici, possono
rispondere anche 5 volte più velocemente rispetto ad un servo normale. Inoltre l'elevato numero di passi di un servo digitale
garantisce precisione nella risposta e nei movimenti. I servi digitali hanno generalmente anche una coppia notevolmente
superiore ai servi analogici, ma soprattutto la coppia è costante. La forza fatta dal servo rimane costante all'inizio come alla
fine della corsa. I servi digitali hanno però anche un maggiore assorbimento di corrente rispetto ai normali servi.