Appunt i di Ca l c o l a t o r i El e t t r o ni c i
C a p i t o l o 1 0 – P a r a l l e l i s mo n e i c a l c o l a t o r i
D IREZIONI FUTURE ............................................................................................................. 2
Introduzione .................................................................................................................. 2
Tassonomia dei calcolatori secondo Flynn ....................................................................... 2
Calcolatori SIMD ........................................................................................................... 3
Calcolatori MISD ........................................................................................................... 5
Calcolatori MIMD.......................................................................................................... 5
Terminologia per le macchine MIMD ........................................................................... 6
Architettura MIMD a scambio di messaggi.................................................................... 7
Architettura MIMD a memoria condivisa ...................................................................... 8
Problema della coerenza delle cache.......................................................................... 9
Prestazioni e problemi delle macchine MIMD ............................................................. 10
Processori per applicazioni speciali: DSP...................................................................... 12
APPUNTI VARI SUI SISTEMI PARALLELI ............................................................................... 13
Limiti della classificazione di Flynn e nuova classificazione............................................ 13
Architetture sincrone ................................................................................................. 13
Architetture MIMD ................................................................................................... 14
Paradigmi MIMD ...................................................................................................... 15
Confronto tre architetture seriali, pipelined e parallele .................................................. 15
Pipelining................................................................................................................. 16
Parallelismi .............................................................................................................. 18
Valutazione delle prestazioni ........................................................................................ 19
Strutture di interconnessione......................................................................................... 20
Banda passante di un sistema di calcolo ........................................................................ 20
Legge di Amdahl applicata ad una macchina con N processori ........................................ 21
Legge di Braunl per architetture SIMD .......................................................................... 23
Tempo di comunicazione inter-processor........................................................................ 25
Legge di Amdahl modificata .......................................................................................... 25
Appunti di “Calcolatori Elettronici” – Capitolo 10
D
Diirreezziio
on
nii ffu
uttu
urree
Introduzione
In questo capitolo vogliamo abbandonare la prospettiva sostanzialmente
“conservativa” seguita nei precedenti capitoli, dando invece dei cenni al futuro
dell’architettura dei calcolatori. In generale, possiamo allora subito dire che gli
obbiettivi dei progetti innovativi sono essenzialmente due, alternativi tra loro:
•
riduzione del rapporto costo/prestazioni;
•
raggiungimento di un’alta scalabilità ( 1) affiancata da un soddisfacente
rapporto costo/prestazioni.
Abbiamo ampiamente visto che le CPU con parallelismo a livello di istruzioni
sfruttano il parallelismo intrinseco di un programma, ossia quello esistente tra le
singole istruzioni. Si può però facilmente verificare che il parallelismo di tale tipo è
relativamente limitato, salvo applicazioni molto particolari: risulta infatti difficile
raggiungere una buona efficienza di uso al di sopra di 8 unità funzionali parallele
all’interno della singola CPU. A questo, si aggiunge il fatto che esistono applicazioni
nelle quali è molto difficile, se non impossibile, individuare parallelismo a livello di
istruzione: i sistemi operativi sono un classico esempio a questo proposito.
L’alternativa emersa da alcuni decenni è quella dei cosiddetti sistemi paralleli,
nei quali cioè il parallelismo sfruttato è quello a livello di sequenza di istruzioni o di
processo: l’architettura, in questi sistemi, è costituita da un certo numero di unità
di elaborazione, dotate ognuna di proprie risorse e che interagiscono l'una con
l’altra in modo opportuno. Il concetto alla base dei sistemi paralleli è quello per
cui, eseguendo simultaneamente più passi di uno stesso problema, si può
completare il lavoro molto più velocemente .
Tassonomia dei calcolatori secondo Flynn
Diversi anni fa, Flynn propose un semplice metodo di classificazione dei
calcolatori, basato sul parallelismo del flusso di istruzioni e del flusso di dati ad
esso connesso:
•
con flusso di istruzioni intendiamo la sequenza di istruzione eseguite da
una unità di elaborazione (un processore);
•
con flusso di dati intendiamo invece la sequenza di operandi manipolato
dalla suddetta unità di elaborazione.
Flynn propose le seguenti 4 categorie (classificazione di Flynn):
1
La scalabilità è sostanzialmente la possibilità di ripartire lo svolgimento di un dato compito tra più unità funzionali, al
fine di sveltire lo svolgimento stesso.
Autore: Sandro Petrizzelli
2
aggiornamento: 15 luglio 2001
Parallelismo nei sistemi di calcolo
•
macchine SISD (Single Instruction Single Data): flusso di istruzioni unico e
flusso di dati unico; sono le classiche macchine monoprocessore di tipo
sequenziale;
•
macchine SIMD (Single Instruction Multiple Data): esiste un unico flusso di
istruzioni, che però viene applicato a più flussi di dati; risono dunque più
processori che eseguono simultaneamente la stessa istruzione su dati
diversi ( 2);
•
macchine MISD (Multiple Instruction Singole Data): esiste un unico flusso
di dati, cui però vengono applicati diversi flussi di istruzioni; in pratica,
più processori eseguono in maniera autonoma istruzioni diverse sullo
stesso flusso di dati;
•
macchine MIMD (Multiple Instruction Multiple Data): in quest’ultimo caso,
più processori eseguono in maniera autonomia istruzioni diverse su dati
diversi.
Nonostante questa classificazione appaia un po’ grossolana (molte macchine
sono infatti un ibrido tra varie categorie) e ormai decisamente superata, essa è
indubbiamente semplice e facile da comprendere e, in ogni caso, fornisce una prima
approssimazione accettabile della realtà attuale.
La macchina tradizionale di Von Neumann è ovviamente di tipo SISD: essa ha un
unico flusso di istruzioni (cioè un unico programma) eseguito da una sola CPU ed
ha poi un’unica memoria che contiene i dati su cui opera il flusso di istruzioni; la
prima istruzione viene presa dalla memoria e poi eseguita, dopodiché si passa al
prelievo ed alla esecuzione dell’istruzione successiva e così via fino al termine del
programma. Le altre tre tipologie, invece, fanno tutte riferimento a macchine che si
definiscono parallele, dove il parallelismo riguarda appunto il flusso di istruzioni o
il flusso di dati o entrambi. Nelle classi SIMD e MIMD ricade la quasi totalità di
macchine parallele realmente costruite. Le macchine MISD, invece, sono
sostanzialmente un caso particolare della classe MIMD.
Calcolatori SIMD
Come anticipato nel precedente paragrafo, una macchina SIMD è caratterizzata
dal fatto che il flusso di istruzioni è singolo, ma opera su più flussi di dati. In
questo caso, si può pensare ad una sola unità di controllo che acceda ad una sola
memoria istruzioni ed invii, ciclo per ciclo, la stessa istruzione da eseguire a un
insieme di unità di esecuzione, che accedono invece ognuna a una propria area
della memoria dati (o, alternativamente, che sono dotate ognuna di una propria
memoria dati opportunamente precaricata) ( 3).
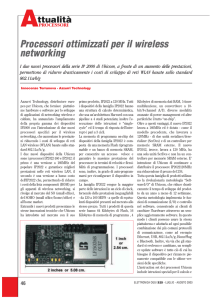
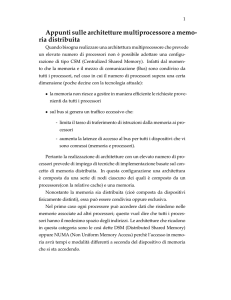
Architetture di questo tipo possono essere ricondotte nello schema più semplice
alla struttura seguente:
2
Vedremo più avanti che macchine di questo tipo sono anche dette calcolatori matriciali o array computers.
I processori vettoriali che abbiamo esaminato nel capitolo 7 potrebbero sembrare delle macchine SIMD, ma in
realtà non lo sono: infatti, abbiamo visto che le istruzioni vettoriali operano su più dati, usando una sola unità
funzionale con un parallelismo di tipo pipeline; quindi, al contrario di quanto avviene nelle macchine SIMD,
una singola istruzione vettoriale non attiva molte unità funzionali; invece, una macchina SIMD effettiva
potrebbe ad esempio avere 64 dati che vanno simultaneamente a 64 unità ALU per formare 64 somme nello
stesso ciclo di clock.
3
aggiornamento: 15 luglio 2001
3
Autore: Sandro Petrizzelli
Appunti di “Calcolatori Elettronici” – Capitolo 10
Memoria istruzioni
e
unità di controllo
Unità
di
elaborazione
Unità
di
elaborazione
......
Unità
di
elaborazione
Memoria Dati
Le varie unità di elaborazione possono naturalmente essere organizzate secondo
schemi più complessi ed eventualmente scambiarsi informazioni.
In ogni caso, in una struttura di questo tipo, i singoli processori possono anche
essere dispositivi molto semplici (al limite, unità aritmetiche dotate di registri di
ingresso e di uscita) come anche architetture dedicate a particolari computazioni. La
sincronizzazione fra i diversi nodi è rigida, dato che tutti, almeno in linea di
principio, devono eseguire l'identica istruzione, con la stessa latenza, sui propri dati.
Il vantaggio principale delle macchine SIMD è dunque quello per cui tutte le unità
funzionali per l’esecuzione parallela sono sincronizzate e rispondono ad una
sola istruzione , proveniente da un unico registro PC ( 4). Ci sono poi altri vantaggi:
•
in primo luogo, si può ridurre il costo dell’unità di controllo affiancandola a
decine di unità di esecuzione;
•
in secondo luogo, di recente ci si è resi conto che si può anche adottare una
dimensione ridotta della memoria di programma: infatti, le macchine SIMD
necessitano di una sola copia del programma da eseguire, al contrario per
esempio delle macchine MIMD che richiedono una copia per ogni
processore. In questo modo, anche in presenza di un elevato numero di
unità funzionali, il costo della memoria di programma risulta minore per le
architetture della classe SIMD rispetto alle altre.
I calcolatori SIMD, al pari delle macchine vettoriali, presentano istruzioni
“compatibili” sia con la classe SIMD (ovviamente) sia anche con la classe SISD: per
esempio, operazioni come il calcolo di diramazioni o di indirizzi non richiedono alcun
parallelismo e sono quindi eseguite da un host computer di tipo SISD. Le istruzioni
SIMD sono invece trasmesse a tutte le unità di esecuzione, ognuna delle quali è
provvista del suo insieme di registri.
Come le macchine vettoriali, anche le macchine SIMD hanno istruzioni che
disabilitano le singole unità di esecuzione.
Al contrario delle macchine vettoriali, invece, l’elevato parallelismo delle macchine
SIMD dipende strettamente dalle reti di interconnessione, ossia da tutto quanto
(hardware e software) viene usato per lo scambio di dati tra i vari elementi
processanti.
4
In questo senso, dal punto di vista del programmatore, il comportamento della macchina è molto simile a
quello di una classica macchina SISD (monoprocessore).
Autore: Sandro Petrizzelli
4
aggiornamento: 15 luglio 2001
Parallelismo nei sistemi di calcolo
Le architetture SIMD raggiungono le loro massime prestazioni quando le istruzioni
vettoriali vengono utilizzate in pieno, ad esempio quando gli array vengono scanditi
all’interno di cicli FOR. Questo per dire che, per ottenere il massimo parallelismo,
occorre una “grande quantità di dati”, intesa naturalmente come “parallelismo dei
dati”. Il limite principale di una macchina SIMD emerge invece quando essa deve
eseguire comandi in cui ogni singola unità di esecuzione deve svolgere operazioni
diverse su dati diversi.
Il progetto di una macchina SIMD richiede di porre attenzione a due importanti
fattori ed al loro rapporto: l’efficienza di utilizzo del singolo processore ed il numero di
processori. La tendenza attuale delle macchine SIMD sembra privilegiare un elevato
grado di parallelismo rispetto all’elevato rendimento del singolo processore.
Architetture di tipo SIMD sono state ampiamente studiate, in particolare per
l'elaborazione di segnale e per quella delle immagini: per esempio, è interessante
ricordare che l'estensione MMX dell'architettura Pentium, progettata esplicitamente
per elaborazione di immagine, è riconducibile a uno schema SIMD.
Calcolatori MISD
Non è del tutto intuitivo immaginare una macchina MISD, in cui cioè più flussi di
istruzioni operano contemporaneamente su un unico flusso di dati, in quanto risulta
molto più semplice pensare a flussi multipli ognuno associato ad un proprio flusso di
dati (che poi è la definizione di macchine MIMD). Ad ogni modo, due esempi di
macchine MISD potrebbero in qualche modo essere le macchine superscalari e le
architetture VLIW descritte nel paragrafo 6, che però presentano una differenza non
irrilevante con le macchine MISD propriamente dette: hanno un unico registro PC,
mentre invece le macchine MISD prevedono un registro PC per ciascun flusso.
Calcolatori MIMD
Potremmo affermare che le macchine MIMD sono le macchine parallele per
eccellenza, dato che presuppongono il parallelismo sia a livello di flusso di
istruzioni sia a livello di flusso di dati . In effetti, fin dalle prime realizzazioni di
calcolatori, i progettisti si sono sempre sforzati di ottenere macchine di questo tipo,
in cui cioè la “potenza” in generale fosse ottenuta semplicemente connettendo molti
calcolatori più piccoli. Con una simile architettura, l’utente dispone, in modo
ordinato, di tante CPU quante se ne può permettere ed ottiene un rendimento di
quantità proporzionata ( 5).
Le architetture MIMD hanno almeno altri due vantaggi, oltre le prestazioni
particolarmente elevate: un rendimento assoluto più alto rispetto al più potente
monoprocessore ed anche un più alto rapporto affidabilità/disponibilità, ottenuto
proprio sfruttando la ridondanza di processori (se un processore si guasta, ce ne
sarà un altro pronto a lavorare per lui).
5
Vedremo comunque tra poco che l’aumento di prestazioni non è lineare come l’aumento delle CPU utilizzate.
aggiornamento: 15 luglio 2001
5
Autore: Sandro Petrizzelli
Appunti di “Calcolatori Elettronici” – Capitolo 10
T
Teerrm
miin
noollooggiiaa p
peerr llee m
maacccch
hiin
nee M
MIIM
MD
D
Prima di fornire qualche dettaglio maggiore sulle macchine MIMD, risulta
opportuno introdurre un po’ di terminologia relativa a questo tipo di macchine.
Una importante suddivisione delle macchine MIMD è relativa alle modalità con cui
viene ripartita l’ “informazione”:
•
nei processori a memoria condivisa, esiste una zona di memoria cui
possono accedere tutti i processori ( 6); i processori comunicano attraverso
variabili allocate in tale zona di memoria condivisa. Per coordinare i vari
processi, sono disponibili delle primitive di sincronizzazione;
•
in alternativa, per la condivisione dei dati si può pensare di mettere in
comunicazione i vari processi tramite uno scambio di messaggi.
Sulla base di questa suddivisione, Bell ha suggerito l’uso delle seguente
terminologia:
•
multiprocessore è una macchina MIMD in cui la comunicazione avviene
tramite memoria condivisa;
•
multicalcolatore è invece una macchina MIMD in cui la comunicazione
avviene solo tramite il passaggio di messaggi espliciti.
In effetti, ci sarebbe da precisare una cosa: in presenza di memoria condivisa, la si
potrebbe comunque usare per lo scambio di messaggi, per cui un multiprocessore
potrebbe essere in grado di eseguire programmi basati invece sullo scambio di
messaggi (e quindi destinati ai multicalcolatori); dualmente, un multicalcolatore
potrebbe simulare, proprio tramite i messaggi, la presenza di una memoria
condivisa, in modo da eseguire programmi che richiedono l’uso della memoria
condivisa. Ecco allora che la distinzione proposta da Bell è specificamente basata
sull’hardware a disposizione della macchina e sul modello di esecuzione del
programma e non sul software che dovrebbe essere eseguito.
Ci sono sostenitori sia del multiprocessore sia del multicalcolatore: i primi
mettono in discussione la programmabilità dei multicalcolatori (data la necessità e la
difficoltà di progettare le primitive per lo scambio dei messaggi), mentre invece i
secondi mettono in discussione la scalabilità dei multiprocessori (data appunto la
presenza di un’unica memoria condivisa, che potrebbe essere limitante delle
prestazioni).
Ad ogni modo, analizziamo con maggiore dettaglio le due soluzioni:
•
6
architetture a scambio di messaggi:
o
il parallelismo è fra processi: tipicamente, si alloca un processo su ogni
nodo, dove per nodo intendiamo un singolo processore e la sua memoria;
o
i processi comunicano solo scambiandosi messaggi, mediante primitive
send (accompagnate dall’identificatore del destinatario, da un'etichetta e
dal messaggio vero e proprio) e receive (accompagnata da etichetta e
messaggio);
o
i processi si sincronizzano “bloccandosi” sui messaggi: il processo che ha
inviato il messaggio si blocca in attesa della risposta. Inoltre, essi si
I multiprocessori dotati di cache coerenti sono tipiche macchine a memoria condivisa.
Autore: Sandro Petrizzelli
6
aggiornamento: 15 luglio 2001
Parallelismo nei sistemi di calcolo
bloccano ponendo delle “barriere” che non possono essere superate fino a
quando lo scambio non è andato a buon fine.
•
architetture a memoria condivisa:
o
sono i cosiddetti threads (cioè sottoprocessi che condividono lo stesso
spazio di indirizzamento) ad essere allocati sui diversi nodi (CPU);
o
i threads comunicano attraverso uno spazio di memoria condiviso
(mediante normali istruzioni load e store del tipo visto per il DLX);
o
i threads si sincronizzano tra loro, mediante operazioni "atomiche" (non
divisibili) sulla memoria o mediante barriere.
In una macchina MIMD, in generale, l’applicazione da eseguire deve essere
innanzitutto partizionata (in processi o in threads), in modo da essere allocata sui
diversi nodi, e le diverse unità di programma devono poi essere ordinate nel tempo
(schedulazione) in modo da garantire che le dipendenze di dati e di controllo
vengano rispettate.
A
meessssaaggggii
dii m
mbbiioo d
D aa ssccaam
MD
MIIM
urraa M
hiitteettttu
Arrcch
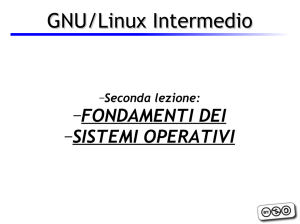
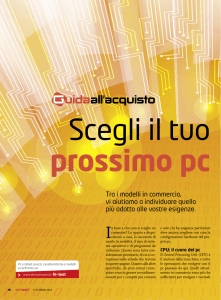
Lo schema generale di una simile architettura (detta anche a memoria distribuita)
è il seguente:
nodo
CPU
CPU
CPU
...................
Memoria
Memoria
Memoria
Rete di Interconnessione
I vari calcolatori (nodi) sono collegati tramite una rete di interconnessione; ogni
nodo viene dotato di una interfaccia veloce alla suddetta rete, in modo da
implementare in modo efficiente le primitive di send e di riceive, nonché le barriere di
cui si è parlato. A parte questo, sotto ogni altro aspetto il sistema è indistinguibile da
un normale sistema monoprocessore.
In queste architetture, i collegamenti tra le unità di elaborazione sono tali che
ognuna di essere abbia il controllo esclusivo di una certa porzione di memoria .
Ci sono in proposito vari schemi di connessione: ad anello, a maglia, ad albero
binario. Una soluzione particolare è quella che prevede una topologia ad ipercubo:
le unità di elaborazione sono collegate tra loro come se si trovassero ai vertici di un
cubo multidimensionale. Il vantaggio è che, pur senza realizzare un numero elevato
di collegamenti, ogni unità di elaborazione può inviare messaggi ad una qualsiasi
altra tramite un percorso comunque breve.
aggiornamento: 15 luglio 2001
7
Autore: Sandro Petrizzelli
Appunti di “Calcolatori Elettronici” – Capitolo 10
A
Arrcch
hiitteettttu
urraa M
MIIM
MD
D aa m
meem
moorriiaa ccoon
nd
diivviissaa
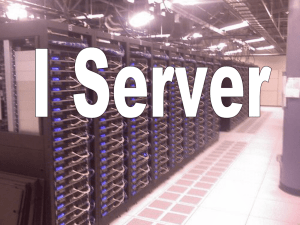
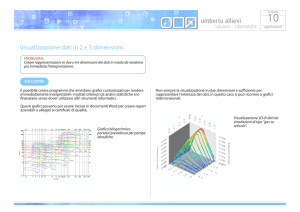
Lo schema generale di una simile architettura è il seguente:
CPU
CPU
.........................
CPU
Rete di Interconnessione
Memoria Condivisa
I vari processori condividono in questo caso un unico spazio di
indirizzamento ; le comunicazioni sono implicite, in quanto avvengono mediante
letture e scritture in posizioni di memoria condivise. La sincronizzazione avviene
ancora mediante la condivisione della memoria e mediante le barriere.
All’aumentare del numero di processori, la memoria condivisa diviene il collo di
bottiglia di tutto il sistema; al contrario, nel caso delle architetture con scambio di
messaggi, questo problema non si poneva, ma il collo di bottiglia era comunque nella
struttura di interconnessione.
Per aggirare il problema del collo di bottiglia sulla memoria, in molti casi questa
architettura concettuale viene in realtà implementata con un multiprocessore in cui
lo spazio di indirizzamento viene distribuito sulle memorie locali dei vari nodi o in
cui comunque ogni nodo è dotato di una cache locale mentre è la RAM ad essere
condivisa. Si realizza perciò una architettura del tipo seguente:
nodo
CPU
CPU
CPU
...................
Cache
Cache
Cache
Rete di Interconnessione
Memoria Condivisa
Autore: Sandro Petrizzelli
8
aggiornamento: 15 luglio 2001
Parallelismo nei sistemi di calcolo
Uno svantaggio di questo sistema si ha quando si decide che ogni unità di
elaborazione può accedere a tutte le unità di memoria globali e comuni: servono
infatti molti collegamenti (si parla di schema a connessione diretta).
Una alternativa sarebbe l’uso di un bus lungo il quale le unità di elaborazione
inviano richieste ai banchi di memoria, i quali in risposta inviano i dati: tuttavia,
sarebbe nuovamente il bus ad essere troppo affollato.
Una ulteriore possibilità è la cosiddetta rete a OMEGA: le unità di elaborazione
sono connesse ai banchi di memoria tramite una serie di commutatori, ognuno dei
quali ha due linee di ingresso e due di uscita; in tal modo, ogni unità di elaborazione
può accedere a tutti i banchi di memoria, ma non è necessario avere tante linee di
comunicazione come nello schema a connessione diretta, in quanto ci pensano i
commutatori ad instaurare il “percorso” richiesto dal collegamento. E’ chiaro che il
vantaggio è tanto maggiore quanto maggiore è il numero di unità di elaborazione e di
banchi di memoria. Al contrario, c’è lo svantaggio per cui ogni messaggio deve
passare attraverso molti commutatori prima di giungere a destinazione.
Problema della coerenza delle cache
Una soluzione in cui i nodi sono dotati ciascuna di una propria cache fa nascere
un problema particolare: è il cosiddetto problema della coerenza della cache. Ad
esempio, un processore potrebbe leggere dati “vecchi” nella propria cache, mentre
quelli nella memoria condivisa sono stati aggiornati da un altro processore; oppure,
un processore può leggere dati vecchi nella memoria condivisa invece di quelli
aggiornati nella cache di un altro professore.
Si può pensare a varie soluzioni per questo problema:
•
la soluzione più banale consiste nell'evitare di portare in cache i dati
condivisi;
•
una soluzione più efficiente richiede invece l'introduzione di un protocollo
per la coerenza delle cache: tale protocollo deve tener traccia delle varie
copie dei dati condivisi e deve informare i nodi (con un aggiornamento o
semplicemente “invalidando” i dati vecchi) quando un nodo compie
un’operazione di scrittura.
A proposito di questa seconda soluzione, si può pensare a due diverse
implementazioni effettive:
•
la prima è quella di un protocollo snoopy (cioè “curioso”): in pratica, una
scrittura viene inviata in broadcast a tutti i nodi, il che presuppone
ovviamente che ogni nodo “resti in ascolto” delle eventuali scritture e
stabilisca se deve aggiornare o meno la propria cache;
•
la seconda implementazione è quella dei cosiddetti protocolli directorybased, nei quali una transazione di scrittura viene inviata solamente a quei
nodi di cui è noto che possiedono una copia del dato da aggiornare. In
questo caso, deve esserci da qualche parte una specie di tabella consultabile
da ciascun nodo, in cui siano registrati i nodi che possiedono una copia del
dato che si sta per scrivere; così facendo, il nodo che vuole effettuare la
scrittura può informare solo i nodi interessati e inviare solo a loro i nuovi
dati.
aggiornamento: 15 luglio 2001
9
Autore: Sandro Petrizzelli
Appunti di “Calcolatori Elettronici” – Capitolo 10
E evidente che la prima soluzione è più semplice, ma comporta un traffico molto
più elevato sul bus, data la necessità del broadcast; essa si adatta perciò soprattutto
a quelle architetture in cui il collegamento tra i nodi viene effettuato mediante un
bus condiviso.
Ad ogni modo, ad prescindere dalla soluzione scelta, il nodo può poi decidere se
aggiornare la copia invalidata oppure no: ad esempio, se i dati coinvolti non sono più
necessari, non è necessario perdere tempo ad aggiornarli.
Resta poi insoluta un’ultima questione: se aggiornare anche la memoria primaria
quando si aggiornano le cache, oppure considerare corretti solo i dati contenuti in
queste ultime.
P
Prreessttaazziioon
nii ee p
prroobblleem
mii d
deellllee m
maacccch
hiin
nee M
MIIM
MD
D
Rispetto ad una tradizionale macchina SISD, le macchine MIMD offrono
prestazioni decisamente migliori per l’implementazione di sistemi time
sharing (cioè a condivisione di tempo): a parità di carico di lavoro, in una macchina
MIMD si possono infatti eseguire in parallelo più compiti tra loro indipendenti,
nonostante il tempo di CPU di ciascun compito rimanga invariato rispetto alle
macchine SISD. Il risultato è dunque un maggiore throughput, mentre la latenza dei
singoli programmi rimane invariata ( 7). Proprio per questo motivo, attualmente le
macchine MIMD rappresentano una fetta di mercato significativa, che si aggiudica la
maggior parte del settore dei mainframe e in pratica tutto il settore dei
supercalcolatori.
Ad ogni modo, non bisogna pensare, relativamente alle macchine MIMD, che sia
tutto “rose e fiori”. Infatti, uno dei principali punti deboli per queste macchine è il
numero ancora troppo esiguo di applicazioni destinate specificamente a questo tipo
di macchine e quindi in grado di sfruttarne le potenzialità: la maggior parte delle
applicazioni non sono state scritte o adattate (rispetto alle versioni originali per le
macchine SISD) per sfruttare tutti i processori presenti e ridurre così il throughput,
il che inficia l’opportunità di acquistare questo tipo di macchine. Viene ovviamente
da chiedersi il perché di questa carenza di applicazioni: la risposta sta proprio nella
difficoltà di scrivere simili applicazioni. Per comprendere a pieno il concetto,
facciamo una analogia, confrontando il tempo necessario affinché un dato lavoro
venga svolto da un’unica persona o da un gruppo di persone: almeno a livello teorico,
se il gruppo è formato da N persone, il lavoro dovrebbe essere completato in un
tempo N volte inferiore rispetto a quello impiegato da un singolo individuo (per cui si
avrebbe una accelerazione pari idealmente ad N); in realtà, non sarà mai così , in
quanto è necessario quanto meno che le varie persone del gruppo comunichino tra
loro man mano che svolgono i propri compiti; la difficoltà di tale comunicazione è
minima se le persone sono 2 o 3, ma se diventano 1000 o 10000, allora è
evidentemente che le cose si complicano non poco. Più avanti nel capitolo faremo
una analisi più quantitativa di questo discorso.
Un’altra difficoltà per la scrittura di applicazioni per macchine MIMD è il grado di
conoscenza dell’hardware richiesta al programmatore: se quest’ultimo deve scrivere
una applicazione (in un linguaggio ad alto livello) per una macchina SISD, può
tranquillamente disinteressarsi dell’hardware della macchina, in quanto sarà poi
compito del compilatore ottimizzare il codice macchina in funzione di tale hardware;
al contrario, per una macchina multiprocessore, il programmatore scriverà
7
Accade cioè una cosa analoga a quella che riguarda il singolo programma eseguito su una macchina SISD dotata di
pipeline: la latenza delle singole istruzioni rimane invariata, ma il CPI viene molto ridotto e quindi l throughput finale è
maggiore.
Autore: Sandro Petrizzelli
10
aggiornamento: 15 luglio 2001
Parallelismo nei sistemi di calcolo
programmi tanto più efficienti e scalabili quanto maggiore è la sua conoscenza sia
dell’hardware sia dell’organizzazione della macchina. Tra l’altro, quest’ultima
considerazione rende i programmi paralleli poco portabili, proprio perché nascono
specificamente per una macchina e difficilmente si adeguano ad un’altra macchina (o
quanto meno non riescono a sfruttarne a pieno le potenzialità).
L’ultima limitazione per la scrittura di applicazioni parallele proviene direttamente
dalla legge di Amdahl: infatti, questa legge evidenzia che anche le parti meno
importanti di un programma devono essere parallelizzate se si vuole raggiungere il
pieno potenziale, in quanto tutte le eventuali migliorie apportate alla macchine e/o al
programma forniscono incrementi di prestazioni tanto più pronunciati quanto
maggiore è la frazione di tempo in cui possono essere impiegati.
Per comprendere bene questo aspetto, possiamo fare un esempio molto semplice:
supponiamo di voler eseguire un programma su un macchina dotata di 100
processori e di voler ottenere un incremento di prestazioni equivalente rispetto ad
una macchina SISD; ci chiediamo quale porzione della computazione originale può
rimanere sequenziale e quale invece debba essere parallelizzata. Ci basta applicare la
legge di Amdahl, che riportiamo qui di seguito nella sua espressione riassuntiva:
Accelerazione =
In
questa
espressione,
il
1
(1 - Frazione
termine
Frazione
) + Accelerazi
one
migliorata
migliorata
“ Frazione migliorata ”
migliorata
indica
la
frazione
di
computazione che deve risultare migliorata (ossia, nel nostro caso, la frazione di
codice che deve essere parallelizzata), mentre invece il termine “ Accelerazi one migliorata ” è
il miglioramento di prestazioni ottenibile nel caso ideale in cui tutta la
computazione venisse ottimizzata. Nel nostro caso, quest’ultima quantità vale 100,
dato che usiamo 100 processori al posto di uno solo, per cui cominciamo a scrivere
che
Accelerazione =
1
(1 - Frazione
) + Frazione
100
migliorata
migliorata
Dobbiamo ora inserire l’obbiettivo che ci siamo preposti, ossia un miglioramento
complessivo delle prestazioni pari a 100:
100 =
1
(1 - Frazione
migliorata
)+ Frazione
migliorata
100
Questa equazione va risolta nell’unica incognita rimasta ed è intuitivo il risultato
finale: Frazione migliorata = 1 , il che significa che, per ottenere un incremento lineare con
100 processori, TUTTA la computazione originale deve essere parallelizzata. Se per
esempio avessimo voluto una accelerazione complessiva pari a 99, sarebbe risultato
Frazione migliorata = 0.99999 , ossia solo una parte pari a 0.0001 di computazione originale
sarebbe potuta rimanere sequenziale. Visto in un’altra prospettiva, quest’ultimo
calcolo mostra che anche una piccolissima porzione di codice non parallelizzato
(0.0001, cioè lo 0.01%) può determinare una riduzione dell’accelerazione
aggiornamento: 15 luglio 2001
11
Autore: Sandro Petrizzelli
Appunti di “Calcolatori Elettronici” – Capitolo 10
complessiva rispetto a quella ideale desiderata. Anche di questo aspetto ci
occuperemo comunque in seguito nel capitolo.
Processori
Processor i per applicazioni speciali: DSP
Quanto detto nei paragrafi precedenti illustra dunque la grande attenzione che i
progettisti devono rivolgere e rivolgono effettivamente al parallelismo ottenibile nei
calcolatori. Un'altra questione ampiamente approfondita da progettisti è quella dei
calcolatori per applicazioni speciali: grazie all’ausilio di sempre più sofisticati
programmi di CAD (Computer Aided Design) e all’incremento della capacità dei
singoli chip, si è infatti presentata l’opportunità di produrre, rapidamente ed a
prezzi ridotti, circuiti volti a risolvere in maniera efficiente compiti particolari.
Esempi classici sono riscontrabili nei dispositivi per il riconoscimento vocale in
tempo reale e per l’elaborazione di immagini.
I dispositivi per uso speciale (detti spesso coprocessori) agiscono generalmente
in collaborazione con la CPU. Uno dei filoni attualmente più diffusi è quello dei
dispositivi per l’elaborazione dei segnali digitali (DSP, Digital Signal Processing):
questi dispositivi non rispondono ai modelli di calcolo tradizionali, ma sembrano
piuttosto macchine microprogrammate orizzontali ( 8) o al più macchine VLIW ( 9). Essi
tendono a risolvere problemi in tempo reale partendo essenzialmente da un flusso
di dati (in questo caso bit) di tipo continuo.
8
Ne abbiamo parlato nel capitolo 5: sono macchine in cui si predilige l’uso di poche microistruzioni ma di grande
lunghezza al posto di molte microistruzioni di piccola lunghezza.
9
Ne abbiamo parlato nel capitolo 6: sono macchine in cui una singola istruzione corrisponde all’esecuzione di più
operazioni.
Autore: Sandro Petrizzelli
12
aggiornamento: 15 luglio 2001
Parallelismo nei sistemi di calcolo
A
Ap
pp
pu
un
nttii vvaarrii ssu
uii ssiisstteem
mii p
paarraalllleellii
Limiti della classificazione di Flynn e nuova
classificazione
La classificazione di Flynn (che suddivide le architetture dei calcolatori in
SISD, SIMD, MISD e MIMD), per quanto molto semplice, appare oggi insufficiente
per classificare i calcolatori presenti sul mercato. Ad esempio, i cosiddetti
processori vettoriali in pipeline possono essere considerati come macchine parallele,
ma difficilmente li si può classificare secondo Flynn: infatti, non sono macchine di
tipo SIMD in quanto non hanno più processori che eseguono la stessa istruzione,
né possono essere viste come macchine MIMD in quanto non sono asincrone.
Una classificazione senz’altro più attuabile, al giorno d’oggi, è quella che
individua le seguenti categorie:
•
architetture sincrone:
o processori vettoriali in pipeline;
o processori SIMD del tipo processor array;
o processori SIMD del tipo associative memory;
o processori sistolici;
•
architetture MIMD:
o architetture a memoria distribuita;
o architetture a memoria condivisa;
•
paradigmi MIMD:
o calcolatori ibridi MIMD/SIMD;
o calcolatori data flow;
o calcolatori di riduzione;
o calcolatori wave front.
A
Arrcch
hiitteettttu
urree ssiin
nccrroon
nee
I processori vettoriali in pipeline (come il DLXV) sono caratterizzati dall’avere
più unità funzionali in pipeline, che effettuano in parallelo operazioni aritmetiche e
logiche sia su vettori sia su scalari. Il parallelismo si manifesta nella
sovrapposizione di fasi diverse di una stessa istruzione su dati diversi, come in una
catena di montaggio in cui vengono lavorati simultaneamente più pezzi. In
strutture di questo tipo, il tempo di latenza è definito come il tempo che intercorre
tra l’inizio dell’elaborazione e l’apparire del primo risultato. Una struttura con
elevato tempo di latenza può risultare comunque efficiente solo quando vi è un gran
numero di calcoli identici da eseguire, in quanto in questo modo nessuna unità
funzionale risulta inattiva.
aggiornamento: 15 luglio 2001
13
Autore: Sandro Petrizzelli
Appunti di “Calcolatori Elettronici” – Capitolo 10
I processori SIMD di tipo processor array (detti anche processori matriciali)
forniscono invece ottime prestazioni solo per quei programmi che contengono una
alta percentuale di istruzioni vettoriali. Tipiche applicazioni per queste macchine
sono quelle per l’elaborazione delle immagini: la singola immagine è organizzata in
forma matriciale e può essere sia sistemata in una memoria comune sia
partizionato su più memorie locali, a seconda del tipo di elaborazione da compiere.
Da notare che una differenza fondamentale tra i processori vettoriali e i
processori matriciali è che questi ultimi sono dotati di un dispositivo di
comunicazione dei dati che invece i processori vettoriali non hanno.
Una variante dei processori matriciali consiste nell’usare un gran numero di
processori single-bit.
I processori SIMD di tipo associative memory (detti anche semplicemente
processori associativi) sono caratterizzati dal fatto che l’insieme delle memorie dati
è realizzato tramite una memoria associativa: ogni parola di tale memoria è
associata a speciali registri ed alla logica di confronto che compone un processore:
Memoria di programma
Controllore di Programma
Array Controller
ALU e registri speciali
Memoria associativa
Infine, i sistemi di tipo sistolico sono stati pensati per sfruttare la tecnologia
VLSI ed il fatto che le interconnessioni semplici sono quelle che consentono
implementazioni più economiche, alta densità di integrazione ed alte prestazioni;
tali sistemi inglobano contemporaneamente i concetti di pipeline, parallelismo e
regolarità nelle interconnessioni.
In generale, un sistema sistolico è una rete di processori, collegati tramite
interconnessioni dedicate, secondo topologie regolari. Ciascun processore
autonomamente calcola dati e li trasmette attraverso le proprie interconnessioni. Il
“pulsare” regolare dei processori conduce ad un flusso di dati regolare e continuo
attraverso l’intero sistema. Questo tipo di architetture sono molto usate
nell’elaborazione dei segnali, dove infatti l’uscita deve essere cadenzata così come è
cadenzato l’ingresso dei dati.
A
Arrcch
hiitteettttu
urree M
MIIM
MD
D
Come più volte detto in precedenza, in questo caso il programmatore può
controllare più flussi di istruzioni e più flussi di dati.
Le due alternative sono tra architetture a memoria condivisa ed architetture a
memoria distribuita e sono state già esaminate in precedenza.
Autore: Sandro Petrizzelli
14
aggiornamento: 15 luglio 2001
Parallelismo nei sistemi di calcolo
P
Paarraad
diiggm
mii M
MIIM
MD
D
Le macchine appartenenti a questa classe sono tutte basate sui principi MIMD di
operazioni asincrone e manipolazione concorrente di più istruzioni e più flussi di
dati. Si tratta in genere di macchine ancora sperimentali.
I processori ibridi MIMD/SIMD sono architetture che consentono a parti
selezionate di una architettura MIMD di essere controllate in maniera SIMD. In
queste macchine, è fondamentale avere dei collegamenti a larghissima banda, in
modo che dati ed istruzioni possano “spostarsi” rapidamente tra le unità di
elaborazione, rendendo minimi i temi morti: in genere, le unità di elaborazione sono
poche e molto veloci e sono collegate da fibre ottiche.
Un processore ibrido a flussi di dati (o data flow) prende le basi da una
rappresentazione grafica particolare, introdotta da Dennis: in pratica, si utilizza un
grafo in cui i nodi corrispondono a operatori e gli archi corrispondono a canali di
comunicazione per trasmettere valori da un operatore all’altro; la particolarità è che
le operazioni non vengono eseguite dai nodi secondo una sequenza definita dal
programma: ogni nodo esegue la propria operazione solo nel momento in cui
possiede tutti i dati necessari, dopodiché trasmette il risultato al nodo successivo.
Questo schema computazionale è molto simile ad una corsa a staffetta: ogni atleta
(nodo) parte non appena ha ricevuto il testimone (dato) dall’atleta che ha percorso il
tratto precedente di gara. Naturalmente, proprio per il fatto che ogni nodo esegue il
compito assegnatogli solo quando possiede tutti i dati necessari, non c’è il pericolo
di eseguire operazioni prematuramente, così come, ad esempio, non ci può essere il
tentativo di molte unità di elaborazione di leggere simultaneamente una stessa
locazione di memoria. Il vantaggio finale delle architetture a flusso di dati è che si
evitano i casi di strozzatura delle architetture parallele e, allo stesso tempo, si offre
un nuovo modo per sfruttare il parallelismo implicito nei programmi.
Per concludere con questa panoramica, nei primi anni ’80 Kung sviluppò i
concetti del wave front array: il principio di fondo è che, quando un processore ha
eseguito i suoi calcoli ed è pronto a passare i dati al successore, lo informa di ciò
ed aspetta che questi gli dia il via per il trasferimento.
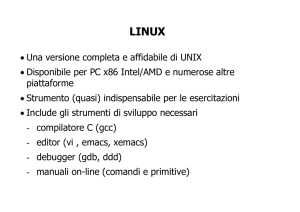
Confronto tre architetture seriali, pipelined e parallele
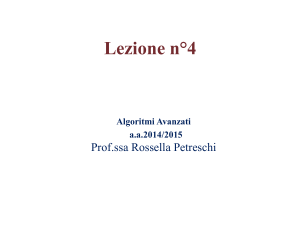
Consideriamo l’esecuzione di tre processi (A, B e C) su un calcolatore; supponiamo
che ogni processo richieda un certo numero di variabili di ingresso (ad esempio due,
denominate x ed y) e produca un certo numero di variabili in uscita (ad esempio una
sola, denominata z). Supponiamo inoltre di poter dividere ogni singolo processo in 4
sottoprocessi (S1, S2, S3 e S4). Nella prossima figura vengono confrontate le
modalità di esecuzione dei vari sottoprocessi in tre architetture:
•
architettura seriale classica (SISD);
•
architettura seriale con pipeline (MISD);
•
architettura parallela con tre processori (MIMD).
aggiornamento: 15 luglio 2001
15
Autore: Sandro Petrizzelli
Appunti di “Calcolatori Elettronici” – Capitolo 10
xA
yA
S1
S2
S3
zA
S4
xB
yB
S1
S2
S3
zB
S4
xC
yC
S1
S2
S3
S4
zC
Esecuzione seriale
xA
yA
S1
xB
yB
zA
S2
S3
S4
S1
S2
S3
S4
S1
S2
S3
xC
yC
zB
zC
S4
Esecuzione pipelined
xA
yA
S1
S2
S3
S4
zA
xB
yB
S1
S2
S3
S4
zB
xC
yC
S1
S2
S3
S4
zC
Esecuzione parallela
E’ ovvio che, nell’esecuzione pipelined, si suppone che non ci siano ostacoli (quelli
che nel capitolo 6 abbiamo chiamato conflitti) all’esecuzione contemporanea di più
sottoprocessi. Analogamente, nell’esecuzione parallela, si suppone che siano
disponibili almeno tre processori, uno per ciascun processo, e che i tre processi
siano del tutto indipendenti tra loro, proprio per consentire la contemporaneità della
loro esecuzione.
Sull’esecuzione seriale dei programmi, abbiamo ben poco da dire. Al contrario, i
prossimi due paragrafi forniscono qualche dettaglio in più circa il pipelining e
l’esecuzione parallela.
P
Piip
peelliin
niin
ngg
Il concetto di pipelining può essere applicato fondamentalmente a tre “livelli”
distinti:
•
pipeline a livello di processore (processor pipeline);
•
pipeline a livello di istruzioni (instruction pipeline);
•
pipeline a livello di operazioni aritmetiche (arithmetic pipeline).
Autore: Sandro Petrizzelli
16
aggiornamento: 15 luglio 2001
Parallelismo nei sistemi di calcolo
La seconda e la terza tipologia di pipelining sono quelle presenti nei processori
vettoriali (specialmente il pipeline aritmetico). Il pipeline a livello di processori
corrisponde invece ad usare una catena di processori funzionanti in pipeline.
In ogni caso, il pipelining è un esempio di “sistema MISD” , in cui cioè un
insieme multiplo di istruzioni opera contemporaneamente sullo stesso insieme di
dati.
Le figure seguenti schematizzano le tre possibilità:
CPU
MEM
CPU
MEM
CPU
MEM
Processors Pipeline. Si suppone che ciascuna memoria abbia una doppia porta di accesso. Si
suppone inoltre che il funzionamento sia sincrono, perché solo in questo caso si parla
rigorosamente di pipeline. Potrebbe capitare che un processore sia più veloce di altri: si
potrebbe allora pensare di farlo lavorare su quantità di dati maggiori rispetto agli altri, ad
esempio operando procedure di sovracampionamento dei dati in ingresso
FETCH
istr i
MEM
DECOD
istr i-1
FETCH
istr i-2
EXE
istr i-3
ALU
MEM
Instructions Pipeline
MEM
R
1
ALU
1
R
2
ALU
2
R
n
ALU
n
MEM
Arithmetic Pipeline
Soffermiamoci sull’ultima figura, in cui abbiamo schematizzato il pipelining a
livello di operazioni in virgola mobile (ossia quindi il pipelining dello stadio EX, con
riferimento alla terminologia usata nel capitolo 6): con R 1 , R 1 ,…,R n-1 abbiamo
indicato i risultati parziali delle operazioni in virgola mobile, mentre ovviamente R n
è il risultato finale.
Nel caso di pipeline vettoriale, quando il primo scalare esce da R1, entra lo
scalare successivo, in modo che, in condizioni di regime si abbia uno nuovo scalare
per ogni ciclo di clock.
Segnaliamo infine che il concetto di pipelining, almeno in generale, è
applicabile a qualsiasi livello : intero sistema, singolo processo, singola
istruzione, singola operazione, singolo stadio di esecuzione di una operazione
(livello più basso). A prescindere dal livello cui venga applicato, il pipelining è tale
per cui, all’aumentare del numero di stadi della pipeline, aumentino anche le
probabilità di conflitti: abbiamo ad esempio visto, nel capitolo 6, che quanto
maggiore è il numero di stadi della pipeline di esecuzione delle istruzioni nel DLX,
tanto maggiore è la probabilità di avere conflitti di dati.
aggiornamento: 15 luglio 2001
17
Autore: Sandro Petrizzelli
Appunti di “Calcolatori Elettronici” – Capitolo 10
P
Paarraalllleelliissm
mii
In un calcolatore, il parallelismo si può ottenere in vari modi:
•
parallelismo temporale→pipeline (vector processor): abbiamo una rete di
unità di esecuzione, con una sola unità di controllo;
•
parallelismo spaziale sincrono→ array processor: abbiamo tanti
processori (omogenei tra loro) che scambiano dati in modo sincrono,
nonostante eseguano istruzioni diverse; i processori sono disposti secondo
una matrice, in modo che ciascuno possa comunicare con quelli che ha
attorno (che generalmente sono 4 se la matrice è quadrata, ma possono
anche essere di più o di meno). Proprio per questa particolare disposizione
si parla di parallelismo “spaziale”;
•
parallelismo spaziale asincrono→multiprocessori: abbiamo una rete di
processori autonomi ed eterogenei; essi si scambiano informazioni secondo
protocolli del tipo domanda→risposta. Rispetto al caso precedente, la
disposizione può anche essere la stessa, ma in generale manca la
sincronizzazione tra i processori. Ci sono del resto casi in cui i processori
sono comunque sincronizzati, come avviene ad esempio nelle macchine
SIMD.
Possiamo inoltre fare la seguente classificazione:
10
•
elaborazione concorrente (concurrent processing): si ha quando un
sistema di calcolo esegue il suo carico elaborativo costituito da più
processi indipendenti (ed eventualmente eterogenei tra di loro), eseguibili
in tempi successivi ed eventualmente sotto il controllo di un’unica unità di
controllo. In questo caso, dunque, i vari task (o compiti o processi)
“concorrono” per la produzione del risultato finale nonché per l’uso
dell’unica unità di controllo;
•
elaborazione distribuita: si ha quando un sistema di calcolo esegue il suo
carico elaborativo costituito da un insieme di processi (concorrenti
nell’esecuzione del codice) eseguibili contemporaneamente su diverse unità
di elaborazione (PU, Processing Unit); esiste ovviamente una unità di
elaborazione che potremmo definire master e che ha il compito di ripartire
il carico di lavoro tra i vari nodi del sistema;
•
elaborazione parallela: si ha quando il carico elaborativo del sistema di
calcolo è costituito da più “parti” (dette unità atomiche ( 10) o moduli)
eseguibili
nello
stesso
tempo
su
differenti
unità di
calcolo
(fondamentalmente delle ALU), che sono in grado di scambiarsi dati
d’utente e dati di controllo. Questo tipo di elaborazione presuppone
dunque che una applicazione venga decomposta in più moduli, omogenei
tra loro, che interagiscano tra loro mediante opportuni meccanismi di
comunicazione e sincronizzazione e che possano essere eseguiti in
concorrenza come processi paralleli: si parla
in questo caso di
programmazione concorrente (più processi su più processori) da non
confondere con la multiprogrammazione (più processi contemporanei su un
solo processore).
Cioè non ulteriormente divisibili
Autore: Sandro Petrizzelli
18
aggiornamento: 15 luglio 2001
Parallelismo nei sistemi di calcolo
I processori con pipeline (MISD) e gli array processor (SIMD) effettuano
l’elaborazione parallela, mentre invece i multiprocessori (MIMD) eseguono
l’elaborazione concorrente ( 11) .
Per poter effettuare il calcolo parallelo, è necessario che l’insieme dei processi
locali che operano concorrentemente possano scambiarsi tra loro dei dati medianti
appositi canali di comunicazione logici; questi ultimi non devono necessariamente
essere fisici. Lo scopo del calcolo parallelo è quello di migliorare le prestazioni
semplicemente ripartendo le attività su un numero crescente di nodi della
rete (definizione di scalabilità) . Occorre dunque avere una architettura che
consenta lo svolgimento in parallelo del maggior numero di operazioni, allo scopo di
ridurre il tempo totale di elaborazione.
Il parallelismo può essere di quattro tipi:
1. parallelismo a livello di fasi di esecuzione di singole istruzioni (pipeline);
2. parallelismo a livello di accessi gerarchici alla memoria (shared memory);
3. parallelismo nell’esecuzione di una singola istruzione su strutture dati
(processori vettoriali);
4. istruzioni multiple interagenti (ci sono cioè più istruzioni
contemporaneamente ed in grado anche di interagire tra loro).
eseguite
Le prime due tipologie di parallelismo non alterano la struttura dei programmi,
mentre invece le altre due richiedono espressamente che vengano isolate le
operazioni da eseguire in parallelo.
Valutazione delle prestazioni
Possiamo subito distinguere due casi:
•
componenti di calcolo: in questo caso, dobbiamo valutare le prestazioni
di picco di uno specifico componente, fornendo le sue caratteristiche di
targa ( 12), ossia caratteristiche che non siano degradate dall’uso di
periferiche o di memorie o di altro;
•
sistema di calcolo: in questo caso, dobbiamo valutare la risposta di un
software complesso (inteso come composizione di software applicativo e
software di configurazione) eseguito su un determinato hardware.
Fondamentalmente, l’analisi ed il progetto di un sistema di calcolo dotato di più
processori presuppongono che si valuti l’aumento della capacità di calcolo
ottenibile aumentando il numero di processori e lasciando invariata la tecnologia
adottata. I parametri di prestazione cui prestare attenzione sono i seguenti:
11
In quest’ultima affermazione si tenga conto che ciascun processore di una macchina MIMD può anche eseguire più
processi: di conseguenza, l’eventuale elaborazione concorrente avviene quando, sul sistema MIMD nel suo complesso, ci
sono più processori che lavorano per arrivare ad un risultato unico, anche se ciò non esclude che gli stessi processori si
stiano dedicando anche ad altro. Del resto, se non fosse così, se cioè o gni processore si potesse dedicare solo ad un
processo, una macchina MIMD con N processori potrebbe eseguire solo N processi.
12
Le attuali architetture di microprocessori tendono a fornire elevate prestazioni su piccoli programmi “benchmark”,
facendo uso di registri, memorie cache, ecc.
aggiornamento: 15 luglio 2001
19
Autore: Sandro Petrizzelli
Appunti di “Calcolatori Elettronici” – Capitolo 10
•
tempi di elaborazione, sia assoluti sia relativi (cioè confrontati rispetto al
clock oppure rispetto ad altre macchine);
•
efficienza computazionale (riferita cioè all’impiego delle risorse di calcolo);
•
accelerazione,
ossia
guadagno
di
velocità rispetto
al
sistema
monoprocessore (con uguale tecnologia): per esempio, se la scalabilità è
massima, l’uso di N processori dovrebbe idealmente garantire una
accelerazione pari proprio ad N;
•
quantità di memoria locale necessaria (ad esempio, deve essere sufficiente
per non dover spezzare in più parti un unico codice sequenziale);
•
rapporto costo/prestazioni.
Gli obbiettivi cui bisogna mirare sono i seguenti:
•
massimo parallelismo del codice eseguibile;
•
massimo bilanciamento, tra le varie unità di elaborazione, del carico
computazionale;
•
minima attività di comunicazione tra i vari nodi (unità di elaborazione) del
sistema di calcolo;
•
ottimizzazione della quantità di memoria a disposizione del singolo nodo;
•
ottimizzazione della potenza di calcolo di ciascun nodo.
Strutture di interconnessione
Si è detto più volte che, in un sistema dotato di più unità di elaborazione
(sistema parallelo), devono essere presenti delle adeguate strutture di
interconnessione per lo scambio di informazioni. Si è verificato che proprio tali
strutture sono spesso i veri colli di bottiglia per un sistema parallelo ( 13), in quanto
introducono delle forti limitazioni sul numero di processori collegabili e possono
essere oggetto di contesa da parte di più processori.
Un concetto fondamentale, per le strutture di interconnessione, è la cosiddetta
banda passante: è la portata (espressa in bit per secondo, bps) della rete di
interconnessione tra i vari processori nonché tra i processori ed il mondo esterno.
Banda passante di un sistema di calcolo
Consideriamo il caso semplice di un sistema monoprocessore con h processi da
eseguire: indicando con b la banda passante del processore, la banda passante del
sistema (cioè il numero di eventi o processi da eseguire) risulta pari a
B h (1) = b ⋅ (1 − rT(h ) ) − K
In questa espressione, rT(h) è la frazione di carico computazionale spesa per
l’attività di routing, ossia per l’instradamento dei dati nel rispetto della topologia
13
Qualcosa di analogo avviene per il bus nei sistemi a singolo processore del tipo Von Neumann
Autore: Sandro Petrizzelli
20
aggiornamento: 15 luglio 2001
Parallelismo nei sistemi di calcolo
adottata nel sistema. La costante K, invece, è una costante correttiva e tiene conto
di altri eventi paralleli accessori: ad esempio, tiene conto delle routine eseguite dal
sistema operativo.
Per estendere quella formula al caso di N processori, ci basta sostituire il termine
additivo 1 proprio con N ed eliminare K:
B h ( N) = b ⋅ (N − rT(h ) )
Questa quantità raggiunge evidentemente il suo limite superiore (=b×N) quando
non c’è carico dovuto al routing, per cui rT(h) diventa pari ad 0.
Legge di Amdahl applicata ad una macchina con N
processori
Quando abbiamo studiato la legge di Amdahl, ne abbiamo dato la seguente
rappresentazione analitica:
Accelerazione =
1
(1 - Frazione
migliorata
)+
Frazione migliorata
Accelerazione migliorata
Essa afferma sostanzialmente che l’accelerazione ottenibile introducendo una
qualche miglioria su una macchina è legata strettamente alla frazione di
computazione che risente positivamente delle migliorie, frazione che deve essere
quanto più grande possibile.
Se partiamo da una classica macchina sequenziale monoprocessore (SISD), una
possibile miglioria consiste nell’aggiungere un certo numero di processori
(passando dunque ad una macchina parallela) in grado di operare in parallelo. Il
nostro obbiettivo è dunque quello di verificare se e quale accelerazione è ottenibile
con l’introduzione di tali processori.
Cominciamo ad elencare i termini che utilizzeremo:
•
indichiamo con h il grado di parallelismo del carico elaborativo che
intendiamo eseguire, ossia il numero di processi che possono essere
eseguiti in parallelo;
•
indichiamo con T h (1) il tempo che sarebbe richiesto da un sistema
monoprocessore per completare il carico computazionale dovuto agli h
processi e con T h (N) il tempo che sarebbe invece richiesto, per lo stesso
carico computazionale, da un generico sistema ad N processori;
•
infine, indichiamo con f la porzione non parallelizzabile del codice, ossia
quella che deve essere necessariamente eseguita in modo sequenziale
(tramite quindi un unico processore).
Si può vedere facilmente che la quantità Th (N) è calcolabile nel modo seguente:
Th ( N ) = f ⋅ Th (1) + (1 − f ) ⋅
aggiornamento: 15 luglio 2001
21
Th (1)
N
Autore: Sandro Petrizzelli
Appunti di “Calcolatori Elettronici” – Capitolo 10
Il senso della formula è abbastanza evidente: il tempo totale richiesto dal sistema
multiprocessore è la somma del tempo richiesto dal sistema monoprocessore,
pesato per la frazione di codice non parallelizzabile, e di un contributo che sfrutta i
vantaggi all’elaborazione parallela; quest’ultimo contributo, pesato per la frazione
di codice parallelizzabile, è infatti dato dal tempo richiesto dal monoprocessore
diviso per il numero di processori disponibili.
Il caso ideale sarebbe ovviamente quello in cui f=0, in quanto avremmo
banalmente Th ( N) =
Th (1)
, ossia una riduzione del tempo di elaborazione di un
N
fattore pari al numero di processori a disposizione. Al contrario, per f≠0, si ha una
penalizzazione dovuta alla frazione di codice che non è parallelizzabile e quindi non
può usufruire della presenza dei vari processori, ma ne utilizzerà uno solo.
A questo punto, diventa immediato calcolare l’accelerazione ottenuta col sistema
ad N processori, confrontando i tempi totali tra il suddetto sistema e quello a
singolo processore:
Accelerazione =
Th (1)
=
Th ( N)
1
f + (1 − f ) ⋅
1
N
=
N
N
=
f ⋅ N + (1 − f ) 1 + f ⋅ ( N − 1)
Da notare che abbiamo qui calcolato il rapporto tra T h (1) e T h (N) e non viceversa,
per il semplice motivo che T h (1) è il tempo più lungo, per cui la frazione così
calcolata risulta maggiore di 1 e quindi effettivamente indicativa di una
accelerazione.
E’ importante chiarire che l’accelerazione così calcolata è relativa ad N processori
e h processi, per cui spesso si trova quella formula scritta nel modo seguente:
S h ( N) =
Th (1)
N
=
Th ( N) 1 + f ⋅ (N − 1)
dove S sta per “speed up”, ossia appunto “accelerazione”.
Facciamo un rapido esempio numerico: supponiamo che i processori a
disposizione siano 1000 e che anche i processi da eseguire siano 1000; supponendo
che la frazione di codice non parallelizzabile sia pari all’ 1% (quindi f=0.01),
otteniamo una accelerazione pari a
S1000 (1000) =
1000
= 91
1 + 0.01 ⋅ (1000 − 1)
Risulta evidente, da questo calcolo, che l’incremento di prestazione ottenuto
(quantificato appunto dall’accelerazione) è decisamente non proporzionato al
numero di processori: in particolare, una accelerazione pari a 91, rapportata a
1000 processori, dice sostanzialmente che il sistema viene impegnato per meno del
10% delle sue prestazioni di picco e questo a causa di una piccola porzione
sequenziale (1%). Solo nel caso ideale in cui fosse f=0, otterremo una accelerazione
perfettamente commisurata all’incremento del numero di processori ( 14).
14
Ci sono alcune ragioni per cui non potrà mai essere f=0: ad esempio, l’inizializzazione dei parametri è un tipico processo
non parallelizzabile, come anche la raccolta dei risultato. Tanto per fare un esempio, consideriamo l’elaborazione di una
immagine: essa dovrà essere acquisita da un solo processori e solo dopo potrà essere elaborata da più processori (ad
Autore: Sandro Petrizzelli
22
aggiornamento: 15 luglio 2001
Parallelismo nei sistemi di calcolo
Un modo abbastanza intuitivo per sintetizzare quest’ultimo concetto consiste nel
calcolare l’accelerazione per N che tende ad infinito (cioè l’accelerazione
asintotica):
1
1
N
= lim
=
N → ∞ 1 + f ⋅ (N − 1)
N →∞ 1
1 f
+ f ⋅ 1 −
N
N
lim Sh ( N) = lim
N →∞
Questo risultato dice che, a prescindere da quanti processori utilizziamo
(purché ovviamente in numero elevato), l’accelerazione ottenibile è comunque
superiormente limitata da 1/f ; al crescere di f, il limite scende in maniera
inversamente proporzionale. Ad esempio, se abbiamo un programma costituito per
il 10% da calcoli puramente sequenziali, non potremo mai ottenere una
accelerazione superiore a 1/0.1=10, anche se usassimo infiniti processori.
Questa forte limitazione di prestazioni è dovuta essenzialmente al fatto che,
nonostante la presenza di molti processori, alcuni di essi non vengono comunque
usati per tutto il tempo di esecuzione, data la presenza del codice non
parallelizzabile: l’accelerazione è tanto minore quanto maggiore è il numero di
processori effettivamente impegnati. Una misura quantitativa di quest’ultimo
concetto si ottiene facendo il rapporto tra l’accelerazione ed il numero N di
processori, in modo da ottenere l’efficienza di utilizzo dei processori stessi:
η=
S h ( N)
1
=
N
1 + f ⋅ (N − 1)
Bisogna a questo punto precisare una cosa: questo modo di studiare una
macchina dotata di più processori potrebbe risultare troppo pessimistico nel
caso di alcuni tipi di architetture ; in particolare, esso risulta applicabile solo per
macchine di tipo MIMD (in cui ci sia parallelismo asincrono dei dati, cioè più
processi operanti in modo indipendente su più dati), mentre per altre architetture
(ad esempio le SIMD) bisogna fare altre considerazioni, cui sono destinati i prossimi
paragrafi.
Legge di Braunl per architetture SIMD
In questo paragrafo ci concentriamo specificamente su una macchina SIMD (cioè
con flusso singolo di istruzioni e flussi multipli di dati): a tal proposito, ricordiamo
che una simile macchina può essere pensata come costituita da una sola unità di
controllo che acceda ad una sola memoria istruzioni ed invii, ciclo per ciclo, la stessa
istruzione da eseguire a un insieme di unità di esecuzione.
Un programma SIMD contiene comandi sia scalari sia vettoriali e la sua
esecuzione è simile a quella di un programma eseguito in modo sequenziale sulla
macchina di Von Neumann: infatti, un singolo comando vettoriale di un sistema
SIMD con N processori può essere implementato
monoprocessore tramite N comandi eseguiti in sequenza .
su
un
sistema
La terminologia che useremo in questo paragrafo è solo leggermente diversa
rispetto al paragrafo precedente:
esempio suddividendola in tante righe quanti sono i processori); al termine dell’elaborazione, essa dovrà essere ricostruita
nuovamente da un solo processore.
aggiornamento: 15 luglio 2001
23
Autore: Sandro Petrizzelli
Appunti di “Calcolatori Elettronici” – Capitolo 10
•
indichiamo con N il numero di componenti di un singolo comando
vettoriale SIMD;
•
indichiamo con T N (1) il tempo necessario per elaborare un comando
vettoriale ad N componenti tramite un unico processore ( 15); indichiamo
invece con T N (N) il tempo richiesto per eseguire lo stesso comando tramite
N processori ( 16);
•
infine, indichiamo con f la porzione non parallelizzabile del codice, ossia
quella che deve essere necessariamente eseguita in modo sequenziale.
Possiamo subito calcolare la quantità TN (1): se il codice fosse interamente
parallelizzabile (f=0), il tempo di esecuzione richiesto al sistema monoprocessore
sarebbe banalmente pari ad N volte il tempo richiesto dal sistema con N processori;
al contrario, in presenza di una frazione f non nulla di codice non parallelizzabile,
bisogna tener conto della relativa penalizzazione, per cui risulta
TN (1) = f ⋅ TN ( N) + (1 − f ) ⋅ N ⋅ TN ( N)
Abbiamo qui calcolato quanto tempo è necessario per elaborare un comando
vettoriale ad N componenti su un unico processore sapendo quanto tempo
impiegano N processori e sapendo che esiste una frazione f≠0 di codice non
parallelizzabile. Questa è la legge di Braunl.
Usandola per calcolare l’accelerazione del sistema SIMD rispetto ad un classico
sistema monoprocessore, otteniamo evidentemente che
S N ( N) =
TN (1)
= f + (1 − f ) ⋅ N
TN ( N )
Se facciamo lo stesso esempio numerico fatto nel paragrafo precedente (cioè
N=1000 e f=0.01), otteniamo una accelerazione pari a 990, quindi molto prossima
ad N (al contrario di quanto ci veniva indicato dalla legge di Amdahl, che forniva
una accelerazione pari appena a 91) .
In generale, la formula ottenuta, confrontata con la legge di Amdahl applicata a
macchine MIMD (e solo a quelle), ci dice che, mentre con le macchine MIMD
l’accelerazione ottenuta è tanto maggiore quanto minore è f (cioè diminuisce
linearmente con 1/f), con le macchine SIMD essa diminuisce al diminuire di f
(in particolare, l’accelerazione diminuisce quasi linearmente con f) .
In questi discorsi bisogna
parallelizzabile è data da
tener
conto
f=
che
la
frazione
di
codice
non
f SIMD
N
A parità di f SIMD , maggiore è il numero dei processori impegnati in un comando
SIMD e minore diventa la frazione f.
15
Come si è detto prima, questo equivale ad eseguire N comandi in sequenza equivalenti all’unico comando vettoriale in
questione.
16
Un sistema che mette a disposizione tanti processori quanti sono i processi da eseguire prende il nome di
paracomputer.
Autore: Sandro Petrizzelli
24
aggiornamento: 15 luglio 2001
Parallelismo nei sistemi di calcolo
Tempo di comunicazione interinter - processor
Nei due precedenti paragrafi, abbiamo calcolato l’accelerazione di sistemi
multiprocessore (MIMD e SIMD) adottando una ipotesi di fondo: abbiamo trascurato
il tempo che nel sistema viene “perso” per la comunicazione tra i vari processori
costituenti il sistema. Al contrario, per valutare in modo compiuto le prestazioni di
una macchina dotata di più processori, dobbiamo necessariamente includere tale
tempo, che indichiamo con C (detto appunto tempo di comunicazione interprocessor).
Supponiamo allora che il codice da eseguire sia completamente parallelizzabile,
per cui supponiamo f=0. In questo caso, seguendo i discorsi dei paragrafi
precedenti, il tempo di elaborazione del sistema ad N processori risulterebbe
idealmente pari al rapporto tra il tempo di elaborazione del sistema
monoprocessore ed N stesso:
Th ( N) =
Th (1)
N
In realtà, dobbiamo includere il tempo di comunicazione inter-processor, per cui
scriviamo più correttamente che
Th ( N ) =
Th (1)
+C
N
Calcolando l’accelerazione (mantenendo l’ipotesi di f=0), otteniamo
S h ( N) =
La quantità
C
Th (1)
Th (1)
Th (1)
NTh (1)
N
=
=
=
Th ( N ) Th (1)
Th (1) + NC 1 + C N
+C
Th (1)
N
è chiaramente il tempo di comunicazione inter-processor
espresso in rapporto al tempo di elaborazione del single-processor: la si indica
normalmente con c, per cui scriviamo che
S h ( N) =
N
1+ c ⋅ N
Rispetto al valore ideale di accelerazione (=N) calcolato per f=0, abbiamo dunque
una penalizzazione di un fattore (1+c⋅N), che sarebbe evidentemente nulla se fosse
c=0.
Legge di Amdahl modificata
I discorsi dei paragrafi precedenti portano alla introduzione della cosiddetta
legge di Amdahl modificata. Useremo la seguente terminologia:
•
ε è la possibilità che un dato programma non possa essere ripartito su N
processori (coincide dunque con la frazione non parallelizzabile del
codice, che in precedenza abbiamo indicato con f);
aggiornamento: 15 luglio 2001
25
Autore: Sandro Petrizzelli
Appunti di “Calcolatori Elettronici” – Capitolo 10
•
δ è il cosiddetto sbilanciamento relativo del carico tra gli N processori
impiegati, di cui parleremo tra un attimo;
•
infine, δ/N è il tempo eccedente il tempo di elaborazione ottimale (pari ad
1/N), dovuto appunto allo sbilanciamento.
Per quanto riguarda lo sbilanciamento del carico, esso è definito come la
differenza tra il tempo massimo ed il tempo minimo di elaborazione dei vari
processori. Nel caso tale differenza venga normalizzata al tempo massimo, si parla
di sbilanciamento relativo (simbolo δ ):
sbilanciamento = T max – T min
sbilanciamento relativo = δ =
Tmax − Tmin
Tmax
E’ evidente che lo sbilanciamento tiene conto delle perdita percentuale che si
subisce quando un processore termina prima di un altro il proprio carico di lavoro,
divenendo così inattivo e quindi inefficiente. Il massimo valore dello sbilanciamento
(δ=1, causato da T max >>T min ) si ottiene evidentemente se uno qualsiasi dei
processori rimane completamente inattivo.
Nel caso in cui ε→0 e non tenendo conto del tempo di comunicazione tra i vari
processori, la legge di Amdahl modificata dice semplicemente che
S h ( N) =
N
1+ δ
Questa espressione dice che l’accelerazione ottenuta con gli N processori,
supponendo il codice
penalizzata, rispetto al
completamente parallelizzabile, è comunque
valore ideale N, dallo sbilanciamento : se lo
sbilanciamento raggiungesse il suo massimo valore (δ=1), l’accelerazione
risulterebbe addirittura dimezzata (=N/2), mentre invece, in assenza di
sbilanciamento (δ=0), si raggiungerebbe il valore reale.
Nel caso più realistico in cui il codice presentasse una frazione non
parallelizzabile non nulla (ε≠0), allora la legge di Amdahl modificata dice quanto
segue:
Sh ( N) =
N
(1 − ε)(1 + δ) + c ⋅ N + ε ⋅ log 2 N
In questa espressione (ottenuta mettendo insieme i vari contributi al tempo T h (N)
visti nei precedenti paragrafi), il termine c⋅N tiene conto della penalizzazione dovuta
alla comunicazione tra i vari processori, mentre invece il termine ε⋅log 2 N è un
termine correttivo sul quale non approfondiamo.
Autore: Sandro Petrizzelli
e-mail: [email protected]
sito personale: http://users.iol.it/sandry
Autore: Sandro Petrizzelli
26
aggiornamento: 15 luglio 2001