MICROELETTRONICA
Prof. Mario Bertolaccini
L’AMPLIFICATORE
OPERAZIONALE
A.A. 2006/07
I
INDICE
GENERALITA’
Cap. 1
RESISTENZA DI INGRESSO
1.1 STADIO CON FOLLOWER IN INGRESSO (DARLINGTON)
RESISTENZA DI INGRESSO.
OFFSET DI TENSIONE.
RUMORE
1.2 STADIO CON TRANSISTORI SUPERBETA IN INGRESSO
1.3 STADIO CON COMPENSAZIONE DELLE CORRENTI DI BASE.
Cap. 2
ERRORI IN CONTINUA
2.1 OFFSET DI TENSIONE E RELATIVO DRIFT
STADIO BJT CON CARICO PASSIVO
STADIO JFET CON CARICO PASSIVO
STADIO MOSFET CON CARICO PASSIVO
STADIO DIFFERENZIALE BJT CON CARICO ATTIVO
STADIO DIFFERENZIALE MOS CON CARICO ATTIVO
2.2 OFFSET DI CORRENTE E RELATIVO DRIFT
STADIO BJT CON CARICO PASSIVO
STADIO CON INGRESSO JFET
Cap. 3
SLEW RATE
3.1 CONSIDERAZIONI GENERALI
3.2 TECNICHE DI MIGLIORAMENTO DELLO SLEW RATE CON STADI
DI INGRESSO IN CLASSE A
3.3 TECNICHE DI MIGLIORAMENTO DELLO SLEW RATE CON STADI
DI INGRESSO IN CLASSE A-B
Cap. 4
REIEZIONE DEL MODO COMUNE (CMR)
4.1
4.2
4.3
4.4
4.5
4.6
4.7
Cap. 5
CONSIDERAZIONI GENERALI
SEMPLICE STADIO BJT CON CARICO PASSIVO
SEMPLICE STADIO BJT CON CARICO A SPECCHIO
STADIO BJT CON CARICO A SPECCHIO SIMMETRIZZATO
STADIO CMOS CON CARICO RESISTIVO
STADIO CMOS CON CARICO ATTIVO A SPECCHIO
CMR IN FUNZIONE DELLA FREQUENZA
RISPOSTA IN FREQUENZA E COMPENSAZIONE
5. 1 GENERALITA’
5.2 COMPENSAZIONE “ALLA MILLER”
5.3 LO ZERO NEL SEMIPIANO DESTRO
BIBLIOGRAFIA
II
GENERALITA’
GENERALITA’
Gli amplificatori operazionali moderni vengono progettati e realizzati sulla base di diversi
approcci funzionali, in diverse tecnologie, utilizzando molteplici architetture circuitali più o meno
fortemente condizionate dalla tecnologia impiegata, in versioni “general purpose”, dedicata, “custom”,
“power”, “micropower”, larga banda, “stand alone” oppure “on chip”, completamente differenziali,
ecc. ecc.
Ci occuperemo nel seguito in primo luogo dell’amplificatore operazionale di tipo “classico”,
cioè basato su un approccio progettuale ormai da lungo tempo consolidato, che spesso si designa
(alquanto impropriamente, per certi aspetti) “voltage mode”. In altre parole, dato che l’amplificatore
operazionale tipico viene visto in partenza come un amplificatore di tensione, l’approccio di fondo del
progettista è basato sulla trasmissione del segnale dall’ingresso all’uscita in termini di tensione.0. 1
Discuteremo in seguito in maggior dettaglio questo approccio.
Più avanti verranno trattati altri amplificatori, o derivati dalla struttura operazionale o di altro
genere, come amplificatori operazionali current feedback mode (CFM), amplificatori a
transconduttanza, amplificatori Norton, Instrumentation Amplifiers (amplificatori per strumentazione),
amplificatori di corrente, amplificatori video, amplificatori a larga banda, ecc.
Nella presente sezione limiteremo il campo della trattazione anche per quanto riguarda le
tecnologie realizzative, occupandoci cioè solamente delle tecnologie bipolari e di quelle da essa
direttamente derivate: in sostanza BJT e BiFET. La tecnologia CMOS, viste le sue particolari
caratteristiche, verrà considerata più avanti.
In una visione a blocchi della struttura dell’amplificatore lo si può in generale considerare
costituito da uno stadio di ingresso, un secondo stadio o stadio intermedio e uno stadio di uscita.
Ovviamente tali blocchi sono strettamente interagenti e non possono quindi essere considerati come
elementi circuitali a sé stanti; d’altro canto la suddivisione citata risulta per certi aspetti assai utile
anche perché alcuni parametri che caratterizzano l’amplificatore nel suo complesso sono in prima, e
spesso buona approssimazione determinati dalle caratteristiche di uno soltanto di questi stadi. Ad
esempio la resistenza di ingresso è, con ottima approssimazione, un parametro relativo al solo stadio di
ingresso.
La struttura a tre stadi discende dalla necessità di progettare un amplificatore che in presenza di
retroazione puramente resistiva risulti stabile incondizionatamente (cioè indipendentemente dal
guadagno ottenibile ad anello chiuso) o condizionatamente (per guadagni ad anello chiuso superiori a
un valore minimo): un numero maggiore di stadi renderebbe la compensazione in frequenza on chip,
cioè interna all’amplificatore, in genere assai difficoltosa e renderebbe assai spesso necessario ricorrere
a una compensazione esterna affidata all’utente mettendo a sua disposizione opportuni terminali
ausiliari della struttura. Peraltro si possono presentare anche strutture a più stadi (solitamente quattro)
in genere utilizzate per ottenere guadagno sufficientemente o particolarmente elevato.
Nel seguito quindi, nello spirito di fornire indicazioni utili a livello progettuale, analizzeremo
dapprima i singoli stadi e di seguito i parametri che dipendono anche dalle reciproche interazioni dei
blocchi circuitali.
0.1 E’ opportuno ricordare che l’applicazione di retroazione opportuna (l’amplificatore operazionale è destinato sempre ad
un utilizzo in configurazione retroazionata) consente di approssimare le quattro categorie ideali di amplificazione:
tensione – tensione (amplificatore di tensione)
corrente – corrente (amplificatore di corrente)
tensione – corrente (amplificatore a transconduttanza)
corrente – tensione (amplificatore a transimpedenza)
1
L’AMPLIFICATORE OPERAZIONALE
Ricordiamo con l’occasione che i principali parametri da considerare (cui si devono riferire le
specifiche di progetto) sono
Simbolo
Ad0
Acm0
CMRR
rid
En
In
VOS
IOS
SR
ST
fGB
ro
iout max
Unità di misura
Denominazione
M oppure G
nV/√Hz
pA/√Hz
V oppure mV
nA oppure pA oppure fA
V/s
ns oppure s
MHz
mA
Guadagno differenziale in continua
Guadagno di modo comune in continua
Reiezione del modo comune
Resistenza differenziale di ingresso
Rumore serie
Rumore parallelo
Offset di tensione
Offset di corrente
Slew Rate
Settling Time
Prodotto guadagno banda
Resistenza di uscita
Corrente max erogata al carico
Altri parametri sono ovviamente di interesse. In particolare tra quelli sopra non elencati:
IB
PSRR
VSmin, VSmax
Vid max
Tmax – Tmin
VCM
Ci
IS
VOUT
Corrente di polarizzazione in ingresso
Reiezione dei disturbi di alimentazione
Minima e massima tensione di alimentazione
Massima tensione differenziale in ingresso
Intervallo di temperature di funzionamento
Dinamica del modo comune in ingresso
Capacità di ingresso
Corrente di alimentazione
Dinamica di tensione in uscita
e altri ancora.
Va anche ricordato che tali parametri dipendono in genere dalle condizioni di lavoro,
principalmente tensione di alimentazione e temperatura.
2
RESISTENZA DI INGRESSO
Cap. 1
RESISTENZA DI INGRESSO
1.1 GENERALITA’
Nel caso dello stadio differenziale classico in tecnologia bipolare la resistenza differenziale di
ingresso è determinata dalla transconduttanza gmQ dei transistori di ingresso e dal loro guadagno di
corrente hfe
h fe
rid 2
g mQ
e con gli usuali valori di tali parametri risulta dell’ordine di pochi M.
Per ottenere una resistenza di ingresso significativamente più elevata è possibile
anteporre alla coppia differenziale di ingresso una coppia di follower
utilizzare come dispositivi di ingresso dei transistori “superbeta” cioè caratterizzati da guadagno
di corrente assai più elevato di quello dei transistori che la tecnologia bipolare normalmente
produce
operare una compensazione dinamica delle correnti di ingresso (di base)
utilizzare come dispositivi di ingresso dei transistori JFET (realizzabili nell’ambito della
tecnologia bipolare
E’ ovviamente possibile considerare anche l’introduzione di resistori in serie agli emettitori dello
stadio differenziale. Tale soluzione risulta peraltro di scarsa utilità per quanto riguarda la resistenza di
ingresso poichè un effetto significativo è ottenibile solo con valori della resistenza di degenerazione
>>1/gm, valori che di fatto non sono praticabili. L’introduzione di questi resistori può invece avere
interesse al fine di migliorare lo slew rate.
Ci occupiamo di seguito delle prime tre soluzioni; la quarta soluzione risulta ovvia dal punto di
vista di quanto viene qui discusso e viene comunque rimandata a più avanti in occasione della
trattazione dei sistemi in tecnologia BiFet.
1.2 STADI CON FOLLOWER IN INGRESSO (DARLINGTON)
Anteporre alla coppia differenziale di ingresso una coppia di follower è equivalente a sostituire i
transistori “semplici” di ingresso con transistori “compositi”, in questo caso con strutture tipo
Darlington.
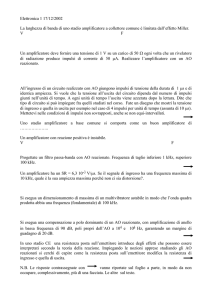
La figura 1.1 mostra la struttura che risulta di più immediata ideazione. Peraltro tale struttura è di fatto
inutilizzabile, principalmente in quanto i transistori Q0 in configurazione follower risultano polarizzati
dalla sola corrente di base dei transistori Q.
Nel caso dello stadio di ingresso considerato
la transconduttanza dei transistori Q deve essere compatibile con una compensazione in
frequenza del tipo Miller e quindi sufficientemente piccola da consentire l’integrazione
della capacità di compensazione 1.1
pur in presenza dei follower di ingresso, la transconduttanza dei transistori Q deve essere
comunque sufficientemente piccola da garantire un elevato valore della resistenza di
ingresso
1.1
Si veda più avanti il capitolo relativo alla risposta e alla compensazione in frequenza
3
L’AMPLIFICATORE OPERAZIONALE
La corrente di lavoro dei transistori Q deve quindi essere scelta in corrispondenza del limite
inferiore che garantisce buon comportamento dal punto di vista del guadagno di corrente e della
risposta in frequenza (tipicamente attorno alla decina di A). I transistori Q0 nella struttura riportata
nella figura 1.1 sarebbero quindi polarizzati con correnti ben al di sotto di quelle che ne
consentirebbero un buon funzionamento. (Tra l’altro il rumore serie di questi transistori sarebbe
altissimo).
+VCC
I0
I0
OUT
I
IN
I
Q0
Q0
Q
IN
Q
2(I+I0)
-VCC
Figura 1.1
Stadio differenziale BJT con ingresso Darlington
In ogni caso nella struttura considerata giocherebbe la dispersione degli hFE dei transistori Q nel
dare un pesante contributo all’offset di tensione. Infatti fissate uguali tra loro quelle dei transistori Q, le
correnti di lavoro dei transistori Q0 dipenderebbero direttamente dai guadagni di corrente dei transistori
Q e risulterebbero disperse appunto come tali guadagni determinando addizionale dispersione di VBE0.
E’ dunque necessario polarizzare Q0 in misura, almeno in parte, indipendente dalla corrente di
base di Q.
Una possibile soluzione è quella presentata nella figura 1.2
4
RESISTENZA DI INGRESSO
+VCC
I0
I0
OUT
I
IN
I
Q0
IN
Q0
Q
Q
IR
IR
R
R
2(I+IR)
-VCC
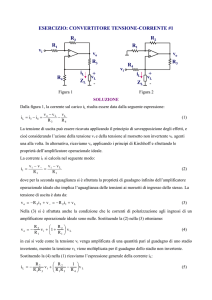
Figura 1.2
Polarizzazione di Q0 tramite resistori ausiliari R.
RESISTENZA DI INGRESSO.
La resistenza differenziale di ingresso della struttura considerata, posto I R I , si può scrivere
1
1
1
rid 2h fe 0
h fe
R 2h fe 0
gm
1
gm0
gm
hFE
avendo posto
1
h fe R
gm
1
h fe R
gm
hFE h fe
2h fe 0 h fe
gm R
1 1
g m 1 h fe h fe g m R
1
gm
La resistenza R è determinata dalla tensione di giunzione VBE dei transistori Q
V
V
1 1 VBE
1 1 I
1 1
R BE BE
ln
IR
I gm VT
gm I S gm
ad esempio per un BJT a diffusione con area di emettitore di 20 2 IS=2∙10-10 A
I
ln
25 27
per correnti di lavoro da 10 a 100 A
IS
e quindi
1 1
rid 2h fe 0 h fe
g m 1 h fe h fe
perché rid risulti elevata dovrebbe essere
<<1
R
Consideriamo due casi.
=0 (figura 1.1)
5
L’AMPLIFICATORE OPERAZIONALE
1
2
il fattore 2 deriva dal legame tra le transconduttanze gm e gm0
gm
il valore di hfe0 è peraltro molto inferiore a quello di hfe se le correnti di lavoro I sono dell’ordine della
1
h fe .
decina di A; tipicamente per I=10 A e si può avere circa h fe 0
3
Quindi per BJT a diffusione con area di emettitore di 20 2, IS=2∙10-10 A, corrente di lavoro
1
h fe
I=10 A, hfe=250 , h fe 0
3
rid=208 M
Si ottiene quindi una resistenza molto elevata, ma, come già detto, il rumore serie risulterebbe
si ha
rid 2h fe 0 h fe
intollerabilmente elevato (in regione bianca, con i dati utilizzati, circa 104 nV
Hz ! ) e la frequenza
di taglio dei transistori Q0 bassa.
=1 (figura 1.2), cioè corrente di lavoro dei transistori Q0 uguale a quella dei transistori Q (a
meno della corrente di base).
h fe
1
rid 2h fe
R
R
si ha quindi h fe 0 h fe
h fe
gm
R risulta infatti assai minore della resistenza di ingresso dei transistori Q e quindi determina la
resistenza vista dagli emettitori di Q0. Risulta però anche grande rispetto a 1/gm per cui, per basse
correnti I, assume valori elevati, di difficile integrazione.
+VCC
I0
I0
OUT
I
IN
I
Q0
IN
Q0
Q
Q
IR
IR
R
R
Q1
2(I+IR)
-VCC
Figura 1.3
Configurazione della struttura Darlington che permette di integrare resistori di valore non troppo
elevato
6
RESISTENZA DI INGRESSO
Quindi per BJT a diffusione con area di emettitore di 20 2, IS=2∙10-10 A, corrente di lavoro
I=10 A, hfe=250 h fe 0 h fe =25
R=62,5 k
rid=28,4 M
Per ottenere valori di R inferiori e quindi di più comoda integrazione si può, ad esempio, ricorrere alla
configurazione riportata nella figura 1.3
I resistori R sono in questo caso polarizzati dalla differenza tra le tensioni di giunzione dei
transistori Q e Q1, VBE-VBE1. Fissate le correnti di lavoro I e I0 tale differenza può essere controllata
tramite le aree di emettitore dei transistori; a correnti uguali essa dipende direttamente dal logaritmo del
rapporto delle aree
AQ1
VBE VBE1 VT ln
2 AQ
Volendo ad esempio ottenere una riduzione di un fattore pari a 10, sempre a pari corrente con i
parametri precedentemente utilizzati, le aree di emettitore devono essere dimensionate in modo che
risulti AQ1 24 AQ .
Ovviamente la resistenza di ingresso risulta ridotta rispetto a quella della configurazione della
figura 1.2
OFFSET DI TENSIONE.
Si può valutare il contributo all’offset di tensione da parte dei soli transistori. Non si considera
il contributo del carico che può essere stimato a parte e, in prima approssimazione, si può considerare
trascurabile quello dei resistori R.
Il contributo dei soli transistori è dovuto alle cadute ai capi delle rispettive giunzioni e quindi si
può scrivere
VBE tot VBE0 VBE
Ponendo
IR I
I
1
I
hFE
hFE
dove IBQ è la corrente di base dei transistori Q e hFE il loro guadagno di corrente.
I 0 I R I BQ I R
Dunque l’offset riceve un contributo anche dalla differenza tra gli hFE dei transistori Q. Ciò
appare ovvio in quanto, come già osservato, a pari corrente di lavoro dei transistori Q, la corrente di
base che essi richiedono dipende dal loro guadagno di corrente e quindi hFE determina diverse
correnti e di conseguenza diverse VBE nei transistori Q0.
Considerando uguali le correnti nei transistori Q e attribuendo quindi l’offset unicamente a
differenza delle correnti di saturazione inversa (mismatch delle aree di emettitore e dei numeri di
Gummel) I S 0 e I S , nonché a differenza degli hFE, si può scrivere
VBE tot
I
I
VT ln 1 S 0 ln 1 S
IS 0
IS
hFE
1
hFE hFE
hFE
ln
1
h
h
FE
FE
7
L’AMPLIFICATORE OPERAZIONALE
espressione che va considerata priva di segno e che si basa sull’ipotesi, di fatto verificata, che le
X
variazioni relative
siano molto piccole (nel campo dei % o meno)
X
Il contributo della differenza tra gli hFE dei transistori Q è evidenziato nel terzo termine tra
parentesi.
Tale termine può essere scritto
h
1
VT ln 1 FE
hFE 1 hFE hFE
Possiamo considerare due casi particolari, di interesse per una valutazione del peso di hFE nel
determinare l’offset di tensione.
=0
cioè Q0 polarizzati dalla sola corrente di base di Q (figura 1.1)
Il termine dipendente da hFE diviene
hFE
7%
hFE
contributo all’offset
h
h
VT ln 1 FE VT FE
hFE
hFE
avendo sviluppato il logaritmo in serie al primo ordine
Ad esempio
1,75 mV
cioè molto elevato. 1.2
1
e quindi piccolo contributo della corrente di base di Q a determinare la
hFE
corrente in Q0)
Il termine dipendente da hFE diviene ora
h
1
VT ln 1 FE
hFE hFE
Rispetto al caso precedente il contributo viene ridotto di hFE e diviene spesso trascurabile.
hFE
7%
Ad esempio per
(hFE=250
=0,1)
hFE 25
hFE
il contributo all’offset risulta pari a 0,15 mV che può essere significativamente inferiore al contributo
delle correnti di saturazione inversa (transistori realizzati tramite diffusione) oppure dello stesso ordine
(transistori realizzati tramite impiantazione ionica).
hFE>>1
1.2
8
(cioè
Si noti che, in tecnologia monolitica, planare, bipolare standard il parametro hFE è tra quelli meno strettamente
controllabili (dipende dai drogaggi relativi di emettitore e base e, soprattutto, dallo spessore della base, dimensione
geometrica quest’ultima non planare, ma ortogonale al piano del processo e quindi realizzabile con limitata precisione e
riproducibilità); tipicamente la sua dispersione relativa è compresa tra 5% e 10%.
Le correnti di saturazione inversa hanno tipicamente dispersione relativa dell’ordine del 5% in un processo a diffusione
e circa un ordine di grandezza inferiore in un processo a impiantazione ionica.
La tolleranza relativa di resistori diffusi è dell’ordine di 1-2% per resistori di base o di emettitore, maggiore per resistori
epitassiali e ancora maggiore per resistori strozzati (pinch resistors); per resistori a impiantazione ionica o a film sottile
può essere significativamente inferiore, sino a un ordine di grandezza. Dipende comunque, in misura non trascurabile,
dalle dimensioni e caratteristiche geometriche del resistore.
RESISTENZA DI INGRESSO
Nel caso dello stadio di ingresso di un amplificatore operazionale in tecnologia bipolare
standard le correnti di lavoro di tutti i transistori risultano di fatto sostanzialmente uguali. Infatti, come
detto all’inizio del paragrafo, la corrente di lavoro dei transistori Q deve essere scelta in corrispondenza
del limite inferiore che garantisce buon comportamento dal punto di vista del guadagno di corrente e
della risposta in frequenza (tipicamente attorno alla decina di A). I transistori Q0 possono quindi
essere polarizzati solamente a correnti più elevate, ma ciò, oltre a essere ingiustificato dal punto di vista
del consumo di corrente, darebbe luogo a correnti di base e quindi di bias più elevate; di conseguenza
le condizioni di polarizzazione usuali comportano I I 0 .
In questo caso il termine che rappresenta il peso della dispersione del guadagno di corrente
diviene
h 1
hFE
VT ln 1 FE
VT 2
hFE hFE
hFE
e risulta del tutto trascurabile.
Un’ovvia soluzione alternativa a quelle sopra considerate è riportata nella figura 1.4. In questo
caso risulta semplicemente
1
rid 2h 2fe
gm
+VCC
I0
I0
OUT
I
IN
I
Q0
IN
Q0
Q
Q
I0
I0
2(I+IB )
-VCC
Figura 1.4
Alimentazione di Q0 tramite appositi generatori di corrente
e si ottiene quindi la più alta resistenza di ingresso: circa un fattore
h fe
rispetto a quella ottenibile con
1 h fe
2 h fe 0
rispetto a quella ottenibile con la configurazione della figura 1.1 (e senza le pesanti controindicazioni di
tale soluzione).
la configurazione della figura 1.2 (e senza dover implementare dei resistori) e circa un fattore
9
L’AMPLIFICATORE OPERAZIONALE
Dal punto di vista dell’offset di tensione la situazione può un poco peggiorare perché interviene
anche il matching tra i generatori di corrente che alimentano i transistori Q0.
RUMORE
Dal punto di vista del rumore le due soluzioni di fatto utilizzabili –figure 1.2 (oppure 1.3) e 1.4–
si comportano come di seguito riportato. Consideriamo i soli generatori serie e consideriamo i
transistori percorsi dalla stessa corrente. La prima soluzione (figura 1. 1), a parte altre
controindicazioni, comporta rumore estremamente elevato.
Transistori Q0 alimentati tramite resistori R (figura 1.2)
La resistenza R è molto maggiore di 1/gm nelle usuali condizioni di polarizzazione e quindi non
contribuisce apprezzabilmente al rumore. Il rumore serie totale riferito all’ingresso è quindi dato da
2
2 2 EnQ
A cui va ovviamente aggiunto il rumore derivante dal carico che si riporta in ingresso attraverso la
transconduttanza dello stadio. Tale transconduttanza coincide con buona approssimazione con quella
dei transistori Q, come assunto sin dall’inizio; più esattamente
gm0 R
1
g meff g m per R
g meff
gm
hfe>>1
gm0 R 1
gm
Transistori Q0 alimentati tramite generatori di corrente (figura 1.4)
In questo caso i generatori di corrente aggiungono tutto il proprio rumore e si ha quindi
2
2 3EnQ
La maggiore resistenza di ingresso comporta quindi rumore più elevato.
Nel caso della soluzione riportata nella figura 1.3 si ottiene un risultato che, nelle usuali
condizioni di lavoro, si avvicina a quello precedente.
1.3 STADI CON TRANSISTORI SUPERBETA IN INGRESSO
Il guadagno di corrente dei transistori bipolari è dato, con buona approssimazione, nelle usuali
condizioni di lavoro, dal prodotto dell’efficienza di emettitore per il fattore di trasporto in base, cioè
dall’efficienza con cui l’emettitore inietta portatori nella base rispetto all’iniezione dalla base
nell’emettitore e dalla frazione di portatori iniettati che raggiunge il collettore. Ambedue questi
parametri dipendono dalla larghezza di base e variano inversamente con questa. Quindi una riduzione
di tale larghezza conduce ad un aumento del guadagno di corrente hfe; transistori così configurati
prendono il nome di transistori “superbeta”.
Peraltro la larghezza di base influenza anche la tensione di breakdown BVCEO (tensione di
breakdown tra collettore ed emettitore definita con la base aperta) la quale si riduce circa in ragione di
una potenza -1/n del guadagno di corrente
1
BVCEO BVCBO h fen
(dove n dipende dalla tecnologia, dalla geometria del dispositivo,
ecc. ed è tipicamente compreso tra 3 e6))
BVCBO è la tensione di breakdown tra collettore e base definita con l’emettitore aperto ed è fissata in
tecnologia planare dalla resistività dello strato epitassiale (collettore).
Guadagni molto elevati, un ordine di grandezza al di sopra di quelli dei transistori standard e
cioè nel campo delle migliaia (tipicamente tra 2000 e 5000) si ottengono quindi a scapito della tensione
10
RESISTENZA DI INGRESSO
di breakdown che scende a pochi V. In realtà nel caso di base ultrasottile il limite alla tensione
applicabile ai capi del transistore non è solitamente più determinato dal breakdown di collettore
(moltiplicazione dei portatori), ma dal cosìdetto “punchthrough”: le regioni di svuotamento (depletion
layers) delle giunzioni collettore-base ed emettitore-base si incontrano (svuotamento totale della base)
già a tensioni dell’ordine di 1 V o poco superiori, il che equivale sostanzialmente a un corto circuito tra
emettitore e collettore.
Pertanto le strutture circuitali che impiegano transistori superbeta devono essere configurate in
modo che questi ultimi risultino protetti e cioè non possano essere ad essi applicate tensioni superiori a
circa 1V. E’ quindi evidente che tali transistori possono essere impiegati solamente in determinate
posizioni entro il sistema integrato: nel caso in esame come elementi di ingresso. Tutti gli altri
transistori sono transistori standard e quindi il processo tecnologico deve essere in grado di produrre
solo localmente transistori “speciali” e cioè sullo stesso chip due tipi diversi di transistori. Ciò
comporta nel processo di fabbricazione un passo addizionale costituito da una seconda diffusione
locale a livello dell’emettitore oppure della base per ridurre lo spessore della base da 0,5-1 di un
transistore standard a 0,1-0,2 di un transistore superbeta (doppia diffusione).
Una possibile configurazione circuitale che risponde ai requisiti sopra esposti è quella riportata
nella figura 1.5.
+VCC
RL
RL
I0
OUT
OUT
IB
IB
Q3
Q5
I
IN
Q4
Q1
Q6
Q2
IN
Q1 e Q2 superbeta
2I+I0-2I B
-VCC
Figura 1.5
Stadio di ingresso utilizzante transistori superbeta.
I transistori superbeta sono ovviamente quelli di ingresso, rappresentati con il corpo vuoto.
La struttura utilizzata è del tipo cascode e i transistori di polarizzazione Q5 e Q6, in
configurazione a diodo, impongono ai capi di Q1 e Q2 una caduta pari a quella di una giunzione e
11
L’AMPLIFICATORE OPERAZIONALE
quindi proteggono tali transistori. La struttura cascode è utilizzata solamente a tale scopo e non per
ottenere guadagno di tensione più elevato e/o per migliorare la risposta in frequenza. Si noti che nello
stadio riportato nella figura 1.5 il carico è passivo; ciò per realizzare una struttura di ingresso “di
precisione”, a basso rumore e basso offset di tensione, caratteristiche che bene si accoppiano con
l’elevata resistenza di ingresso ottenuta.
Un difetto di questa configurazione è costituito dal fatto che il generatore di coda dello stadio
differenziale deve assorbire (a meno delle correnti di base di Q3 e Q4) la corrente del generatore di
polarizzazione I0. Ciò, per effetto della sovrapposizione delle dispersioni dei valori delle correnti messe
in gioco dai due generatori, ha come conseguenza una riduzione della precisione e della riproducibilità
con cui viene definita la corrente di lavoro I dei transistori di ingresso.
E’ possibile ovviare in buona misura a tale inconveniente modificando opportunamente la
struttura esaminata facendo in modo che la corrente I0 non venga inviata nella coda dello stadio, ma
direttamente all’alimentazione negativa. E’ questa la soluzione presentata nella figura 1.6 dove la coda
della struttura differenziale deve fornire soltanto la corrente di base di Q6 che risulta piccola rispetto
alla corrente 2I della struttura principale pur essendo Q6 un transistore pnp (pur di utilizzare una
corrente I0 confrontabile con I).
+VCC
RL
RL
I0
OUT
OUT
IB
Q5
IB
Q3
Q4
Q1
Q2
I
IN
IN
Q6
IB6
Q1 e Q2 superbeta
2I+IB6
-VCC
Figura 1.6
Modifica della struttura riportata nella figura 1.5, che evita che la coda dello stadio sia
interessata dalla corrente I0
Un’altra possibile soluzione è riportata nella figura 1.7 dove gli stessi transistori Q3 e Q4, in una
configurazione “folded Darlington” vengono utilizzati per proteggere Q1 e Q2. Si noti peraltro che
devono essere utilizzati dei transistori pnp.
12
RESISTENZA DI INGRESSO
+VCC
2(I+I0-IB)
Q1 e Q2 superbeta
IN
I
Q1
IN
Q2
IB
B
Q3
Q4
OUT
OUT
RL
RL
I0
I0
-VCC
Figura 1.7
Altra struttura dello stadio di ingresso utilizzante transistori superbeta
Va infine notato che uno spessore estremamente sottile (è questa una dimensione geometrica
ortogonale al piano della tecnologia planare e quindi di più difficile controllo a livello tecnologico)
produce un aumento della difettosità e quindi un conseguente incremento del rumore 1/f a bassa
frequenza. Inoltre cresce la dispersione di alcuni parametri fisici (e tecnologici) quali il guadagno di
corrente e la corrente di saturazione inversa IS con peggioramento di alcune caratteristiche quali l’offset
di tensione.
L’aumento della resistenza di ingresso si accompagna ovviamente a una riduzione della
corrente di bias in ingresso; peraltro, per effetto della aumentata dispersione relativa del guadagno di
corrente, l’offset della corrente di bias non si riduce corrispondentemente.
1.4 STADIO CON COMPENSAZIONE DELLE CORRENTI DI BASE.
Una compensazione dinamica delle correnti di base degli elementi di ingresso consente di
innalzare la resistenza di ingresso oltre che di ridurre l’entità delle correnti di bias richieste al mondo
esterno: nel caso, ideale, di compensazione perfetta, cioè di “cancellazione” delle correnti di base si
otterrebbe una resistenza differenziale di ingresso infinita. Questo approccio richiede ovviamente di
determinare le correnti di base richieste onde produrre delle correnti uguali ed opposte da sommare ad
esse con il verso richiesto.
L’approccio usualmente seguito per ottenere quanto sopra è quello riportato nella figura 1.8.
Ancora una volta si utilizza una struttura cascode in cui i transistori Q3 e Q4, bene accoppiati con Q1 e
Q2 e quindi caratterizzati nominalmente dalla stessa corrente di base, vengono utilizzati semplicemente
per leggere le correnti di base stesse onde poi riportarle sugli ingressi dello stadio. La funzione di
lettura delle correnti e di iniezione delle stesse nelle basi di Q1 e Q2 è affidata agli specchi di corrente
Q5,Q6 e Q7, Q8. La compensazione ovviamente non può essere perfetta, principalmente per i seguenti
motivi:
13
L’AMPLIFICATORE OPERAZIONALE
la dispersione del guadagno di corrente hfe (hFE in continua) dei transistori introduce errore
di lettura delle correnti di base; come più volte ricordato, il parametro hfe (hFE) è uno dei più
dispersi nell’ambito della tecnologia planare, tipicamente 5-10% per dispositivi ottenuti per
diffusione, alquanto meno per dispositivi ottenuti per impiantazione ionica
con transistori di ingresso n-p-n, come nella figura 1.8 e come, salvo rare eccezioni, sempre
si verifica nella tecnologia bipolare standard, gli specchi utilizzano transistori pnp, laterali
nella tecnologia bipolare standard, e quindi a basso guadagno, alimentati inoltre da correnti
molto basse; l’errore di specchio è quindi elevato (potrebbe essere ridotto utilizzando
specchi tipo Wilson, ma con aumento della complessità circuitale e scarso vantaggio,
considerato il punto precedente)
Ne risulta una riduzione delle correnti di bias dell’ordine di un fattore 10 e un pari aumento
della resistenza di ingresso.
+VCC
RL
RL
I
OUT
OUT
Q6
Q5
Q7
IB
Q3
I B I B - I B0
IN
Q4
I
IB0
Q9
Q8
IB
I B0
IB
B
Q2
Q1
Q10
I B I B - I B0
IN
B1
2(I+IB) -IB1
-VCC
Figura 1.8
Stadio di ingresso con compensazione delle correnti di base
Va notato che non si ha uguale riduzione dell’offset delle correnti di bias che anzi tende ad
aumentare essendo il risultato la somma di due correnti disperse in maniera scorrelata. Anche il rumore
parallelo aumenta per la stessa ragione.
14
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
Cap. 2
ERRORI IN CONTINUA
(OFFSET DI TENSIONE – CORRENTI DI BIAS – OFFSET
DELLE CORRENTI DI BIAS)
Si considerano di seguito strutture particolarmente semplici, da considerarsi di riferimento nella
discussione dei fondamentali errori in continua.
Verrà quindi considerata la struttura basilare dello stadio differenziale costituita essenzialmente
da una coppia di transistori, un generatore di corrente di polarizzazione (“coda”), un carico passivo o
attivo.
Spesso vengono utilizzate strutture più complesse e quindi costituite da un numero maggiore di
componenti; ciò per svariate ragioni, a volte anche strettamente dipendenti dalla tecnologia. Particolari
categorie di amplificatori operazionali - si vedano più avanti gli amplificatori current feedback, gli
amplificatori Norton, gli amplificatori di corrente (“current mode”), ecc. – utilizzano stadi differenziali
di ingresso con struttura sostanzialmente diversa da quella più tradizionale.
In ogni caso la trattazione seguente fornisce fondamentali indicazioni di base e può essere
facilmente estesa ad altre architetture circuitali; si può notare comunque che, solitamente, nell’ambito
di una stessa tecnologia, gli errori crescono al crescere della complessità della struttura. In ogni caso
essi risultano fortemente dipendenti dalla tecnologia impiegata.
2.1 OFFSET DI TENSIONE E RELATIVO DRIFT
STADIO BJT CON CARICO PASSIVO
Lo stadio, il più semplice possibile, è mostrato nella figura 2.1.
RC1
R C2
VOUT
C1
IN
Q1
IC2
IN
Q2
2I =
C1 + IC2
Figura 2.1
Offset di tensione: stadio differenziale con transistori bipolari e carico passivo
15
L’AMPLIFICATORE OPERAZIONALE
Con riferimento alla definizione di offset di tensione imponiamo che in continua la tensione
differenziale in uscita VOUT sia nulla 2.1. Nell’ipotesi, nel seguito utilizzata, che le correnti nei due rami
dello stadio siano determinate soltanto dalla relazione
RC1IC1 RC 2 I C 2
VOUT 0
ipotesi che risulta di fatto del tutto ragionevole considerati i piccoli errori di accoppiamento
(“mismatch”) dei dispositivi in un sistema monolitico e il meccanismo di ripartizione della corrente
della coda tra i due transistori che dipende in misura trascurabile dalla presenza dell’effetto Early e dal
mismatch delle tensioni di Early stesse, risulta
I I
R I
VOS VBE1 VBE 2 VT ln C1 S 2 VT ln C 2 S 2
IC 2 I S1
RC1 I S 1
relazione che mostra essere l’offset di tensione, come ovvio, proporzionale alla tensione termica VT e
che mette in evidenza il ruolo della dispersione della corrente di saturazione inversa IS e
dell’accoppiamento tra i resistori di carico. Si noti anche che è stato trascurato il contributo delle
resistenze di spreading rbb’ e della loro dispersione in quanto esse risultano percorse dalle correnti di
base, molto piccole rispetto a quelle di collettore.
Ricordiamo che
A
I S qni2 D n
(tipicamente I S 101 10 fA )
QB
dove
q = 1,6 10-19 Coulomb
carica dell’elettrone
10
-3
ni= 1,45 10 cm
concentrazione di portatori nel Si intrinseco a 300 K
coefficiente di diffusione medio dei portatori nella base
Dn
A
area effettiva di emettitore
QB N BWB
numero di Gummel (numero di atomi droganti nella base per
unità di area di emettitore)
N B drogaggio medio della base; WB larghezza (spessore) effettiva
della base, funzione della tensione collettore-base VCB
Si possono quindi mettere in evidenza i principali contributi a VOS
R
A
Q
VOS VT ln C 2 ln 2 ln 1
A1
Q2
RC1
avendo trascurato il contributo del coefficiente di diffusione che risulta di fatto caratterizzato da
dispersione in questa sede trascurabile.
Si noti che si può anche scrivere
I C RC 2
A
Q
VOS
ln 2 ln 1
ln
gmQ RC1
A1
Q2
evidenziando il fattore moltiplicativo come il rapporto tra la corrente di lavoro IC e la transconduttanza
del transistore bipolare gmQ. Tale rapporto (VT) è indipendente dalla corrente di lavoro e quindi l’offset
è indipendente da quest’ultima.
2.1
Ricordiamo che l’offset di tensione è definito come quella tensione differenziale in continua che sarebbe necessario
applicare tra gli ingressi per portare l’uscita a uno specifico livello. Nel caso degli amplificatori operazionali a doppia
alimentazione simmetrica, ingresso e uscita vengono (tranne casi molto particolari) posizionati al centro delle
alimentazioni, cioè a tensione nulla, per sfruttare appieno e simmetricamente la dinamica e per consentire
accoppiamento con sorgenti di segnale e carichi riferiti a massa senza indurre polarizzazioni.
16
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
Poiché i rapporti che costituiscono l’argomento dei logaritmi sono assai prossimi a 1, in quanto
le dispersioni dei parametri in gioco (si deve qui considerare, ovviamente, la dispersione – o tolleranza
– relativa, nei sistemi monolitici assai migliore di quella assoluta) sono al più dell’ordine di qualche %,
l’espressione precedente può essere validamente approssimata da una relazione lineare ottenuta dallo
sviluppo in serie di Taylor del logaritmo in cui si trascurino i termini di ordine superiore al primo.
A questo proposito risulta utile introdurre esplicitamente le deviazioni dal perfetto
accoppiamento dei vari parametri considerati. Per comodità di calcolo operiamo in termini di simmetria
attribuendo /2 a ciascun elemento X di ciascuna coppia
X
X
X X2
X1 X
X2 X
X 1
con
X X1 X 2 <<X
2
2
2
Si può così scrivere
R A Q
VOS VT C
R
A
Q
C
Ovviamente le differenze possono essere di segno qualsiasi e la situazione peggiore si presenta
quando tutti i termini danno contributi nello stesso senso.
Sino a questo punto si sono considerate le variazioni riferendole a un singolo (anche se
qualsiasi) elemento della popolazione costituita dagli stadi rappresentati nella figura 1.9. La grandezza
che stiamo esaminando va peraltro considerata riferita a una intera popolazione e cioè come un
parametro che la caratterizza. Pertanto si deve procedere in termini statistici con riferimento a una
popolazione statisticamente significativa come può essere quella risultante da un processo tecnologico
di produzione in serie. In generale la grandezza in esame, in questo caso VOS, sarà caratterizzata da un
valor medio e da una varianza. Il valor medio rappresenta un errore sistematico (dovuto ad esempio a
gradiente di processo entro il chip o entro il wafer, oppure alla particolare architettura circuitale
utilizzata), mentre la varianza descrive la distribuzione puramente statistica (dispersione) della
grandezza in esame. Salvo casi molto particolari, di cui avremo esempi nel seguito, la componente
sistematica dell’offset di tensione, risulta trascurabile. Di conseguenza VOS ha sostanzialmente in
media valore nullo ed è quindi caratterizzato dalla sua varianza 2.2; in altre parole il valore che si indica
per l’offset di tensione è in realtà una misura della sua varianza e ha significato statistico.
Un’importante conseguenza di quanto appena detto è costituita dal fatto che, con buona
approssimazione, i vari contributi alla varianza totale risultano indipendenti e si possono quindi
sommare (quadraticamente).
X
Indicando con
la varianza di
X
X
si ottiene
V VT R2 A2 Q2
OS
Normalmente sono note, per una determinata tecnologia, le varianze R e I S per cui conviene scrivere
la relazione precedente nella forma
2.2
La distribuzione risulta solitamente assai bene approssimata da quella di Gauss, salvo casi in cui interventi in sede di
processo (ad esempio trimming) o ad esso successivi (ad esempio selezione) la modificano. Si noti che nella
distribuzione gaussiana
X
1
P (X ) =
exp
2 ps
2s
2
2
(valor medio nullo)
il 63 % della popolazione è compreso tra – e +, il 95,4 % tra -2 e +2.
17
L’AMPLIFICATORE OPERAZIONALE
V VT R2 I2
OS
S
Nel caso di dispositivi ottenuti per diffusione e di dimensioni relativamente piccole (area di
emettitore di qualche decina di 2) e relativamente buon matching dei resistori si ha tipicamente
I S 4 6%
e
R 1%
I S
R
R
IS
e
R
IS
e in cui i due termini contribuiscono con lo stesso segno, un offset di tensione, a 300 K, pari a
I
RC
VOS ( ) VT S
1,3 1,8mV
RC
IS
ciò significa che il 68,3 % degli esemplari (si veda la nota 1.3) è caratterizzato da offset di tensione in
valore assoluto inferiore o al più uguale a quello sopra indicato. Nel caso l’offset (offset massimo
garantito) venga specificato in termini di 2, cioè VOS (2 ) viene considerato il 95,4 % e si riduce la
perdita di produzione (yield loss) al 4,6%. 2.3
Aumentando le dimensioni e utilizzando opportune tecniche di layout si possono ottenere
riduzioni di VOS sino a diverse centinaia di V: ad esempio, già a suo tempo, l’OPA (operational
amplifier) 725, utilizzando tale approccio, poteva vantare VOS= 500V. Il 725 può costituire un
esempio di tecniche di questo tipo: i dispositivi di ingresso sono disposti secondo una geometria a
“centroide comune” in cui ciascun transistore di ingresso viene spezzato, dal punto di vista della
disposizione geometrica (layout), in due parti (figura 2.2) disposte come mostrato schematicamente
nella figura 2.3; il centro della struttura geometrica viene appunto denominato “centroide”.
Ciò comporta nel caso di un dispositivo che abbia
Q1
Q2
IN
IN
Q11
Q12
Q22
Q21
Figura 2.2
Elementi di ingresso, Q1 e Q2, spezzati ciascuno in due per ridurre le disuniformità di
processo
Q11
Q22
Q21
Q12
Figura 2.3
Rappresentazione schematica della strutura geometrica a centroide comune: Q1 e Q2 sono
divisi in due parti disposte secondo le diagonali
2.3
18
Il produttore nello specificare il valore massimo di VOS si basa sostanzialmente sullo yield di produzione accettabile e
quindi ne risulta un valore dipendente da, ma usualmente non uguale a . Peraltro è il parametro cui deve far
riferimento il progettista.
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
Questa disposizione, anche altre volte adottata, o comunque opportune tecniche di layout,
solitamente dipendenti dal processo tecnologico di produzione utilizzato, tendono a minimizzare
l’effetto di disuniformità di determinati parametri di processo (profondità e gradienti di diffusione o
impiantazione, resistenza di strato, ecc.) e minimizzano anche eventuali effetti sistematici.
Un maggiore dettaglio della disposizione a centroide comune degli elementi di ingresso del 725
è mostrato nella figura 2.4 che rappresenta la struttura della metallizzazione (contatti di emettitore,
base, collettore e piste ) adottata.
Dispositivi di dimensioni relativamente grandi (quindi peso trascurabile del procedimento
litografico 2.4 ed effetto di media sulle disuniformità di processo) e realizzati attraverso impiantazione
ionica consentono di ottenere VOS ( ) 100V .
Q22
Q11
C2
collettori
C1
E
emettitori
Q21
Q12
B2
basi
B1
Figura 2.4
Dettaglio della struttura geometrica a centroide comune
Da quanto sopra esposto si deduce che i risultati ottenibili dipendono fortemente dalla
tecnologia adottata, dal processo di fabbricazione, dalla struttura dello stadio (è stato qui considerato lo
stadio più semplice cui è quindi associato l’offset più piccolo; al crescere della complessità circuitale
cresce in genere anche l’errore, ovviamente in dipendenza dalla particolare configurazione utilizzata),
dalla geometria dei componenti, dal layout. I valori numerici sopra riportati sono quindi puramente
indicativi. Peraltro la precedente trattazione, pur basandosi, anche implicitamente, su alcune ipotesi
semplificative (ad esempio base drogata uniformemente), pone in generale le basi per il progetto e
l’analisi di una struttura circuitale dal punto di vista dell’offset di tensione.
Compito del progettista, qualora debba ottenere valori il più possibile contenuti di VOS
(necessari per realizzare un amplificatore “di precisione”, caratterizzato cioè da piccoli errori in
continua, ma anche da basso rumore, elevato guadagno totale, elevata reiezione del modo comune,
buon settling time, ecc.), è quindi quello di individuare, tra quelle disponibili, la tecnologia più adatta,
di utilizzare strutture circuitali che minimizzino il numero dei componenti che danno apprezzabile
contributo all’offset, di dimensionare al meglio i dispositivi curandone le caratteristiche geometriche e
il layout, di prendere in considerazione l’effetto dei gradienti termici, di considerare l’introduzione di
tecniche correttive (trimming – si veda più avanti).
E’ a questo punto opportuna qualche considerazione relativa ai resistori.
2.4
Per dispositivi di dimensioni non troppo piccole e realizzati tramite diffusione la varianza di IS è determinata
principalmente dalla dispersione del numero di Gummel; il procedimento litografico incide nel caso di dimensioni
molto ridotte (transistori per alta frequenza: fT nel campo di molti GHz) e impiantazione ionica (si veda la figura 2.7)
19
L’AMPLIFICATORE OPERAZIONALE
Come si vedrà il carico passivo comporta a parità di tecnologia solitamente un contributo
all’offset significativamente inferiore a quello di un carico attivo (ad esempio a specchio). La
dispersione (tolleranza) relativa dei resistori dipende fortemente in primo luogo dal tipo di resistore e
dalle sue caratteristiche geometriche. In tecnologia monolitica planare un resistore può essere realizzato
utilizzando la regione di base o quella di emettitore o lo strato epitassiale e quindi per diffusione o
impiantazione ionica, oppure può essere realizzato a film sottile. I resistori di base ed epitassiali
possono inoltre essere realizzati nella configurazione “strozzata” (pinch resistor) in cui un tratto della
regione utilizzata, ad esempio la base, viene ridotta di spessore per aumentare la resistenza ottenibile. A
titolo indicativo riportiamo alcuni dati caratteristici 2.5
Tipo di resistore
Resistenza di
strato /
Tolleranza
assoluta ±(%)
Di base, diffusione
Di emettitore, diffusione
Impiantazione ionica
Pinch di base
Epitassiale
Pinch epitassiale
Film sottile
100 - 200
2 -10
100 - 1000
2.000 - 10.000
2.000 - 5.000
4.000 - 10.000
100 - 2.000
20
20
3
50
30
50
5 - 20
Tolleranza relativa (%)
2 (W=5)
0,2 (W=50)
2
1 (W=5) 0,1 (W=50)
10
5
7
0,2 - 2
W = larghezza del resistore
Coefficiente di
temperatura ppm/°C
1.500 – 2.000
600
riducibile a 100
2.500
3.000
3.000
10 - 200
Un aspetto, già menzionato più volte, che evide anche dalla precedente tabella è costituito dalla
dipendenza dalle dimensioni geometriche. Nella figura 2.5 , a titolo di esempio, è riportata la struttura
geometrica di un resistore di base; il resistore è ricavato dalla diffusione di base e viene circondato da
un suo proprio isolamento a giunzione, ottenuto collegando, attraverso una opportuna connessione, il
sottostante strato epitassiale con il terminale a potenziale più alto del resistore oppure a un punto a
potenziale superiore a quello di qualsiasi punto del resistore stesso; le “teste” terminali sono necessarie
per consentire i contatti ohmici (n+) con la diffusione di base e possono contribuire alla resistenza
totale in misura non trascurabile nel caso di resistori corti.
contatto con lo
strato epitassiale
(giunzione di
isolamento)
contatti terminali
W
L
R=
L
R
W
Figura 2.5
2.5
20
Dati tratti da:
Paul R. Gray/ Robert G. Meyer
“Analysis and Design of Analog Integrated Circuits”
John Wiley & Sons
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
Struttura geometrica (vista dall’alto) di un resistore a diffusione di base; il corpo è costituito dalla
diffusione p di base; la relazione riportata per il valore della resistenza vale nel caso L>>W
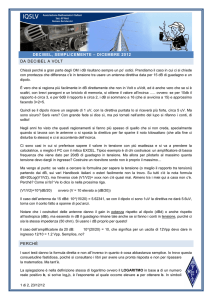
Nel caso di resistori in cui il rapporto W/L è abbastanza piccolo la grandezza geometrica che
entra in gioco nel determinare la varianza relativa dell’accoppiamento tra due resistori è ovviamente,
per ragioni litografiche, W. Nella figura 2.6 è rappresentato un possibile andamento tipico della
R
deviazione standard R =
in funzione di W per un resistore ad impiantazione ionica.
R
Come si vede per larghezze superiori a circa 15-20 la varianza è determinata sostanzialmente
da contributi non geometrici. Va notato che il caso considerato – impiantazione ionica – mette in
particolare evidenza la dipendenza dalle dimensioni geometriche. L’utilizzo di resistori relativamente
larghi (e di transistori di grandi dimensioni) è peraltro in contrasto con l’esigenza di minimizzare
l’occupazione di area onde evitare un aumento delle dimensioni del singolo die e quindi dei costi: esso
deve essere pertanto limitato ai soli elementi che contribuiscono significativamente all’offset.
R (%)
0,35
0,30
0,25
0,20
0,15
0,10
0,05
0,00
0
5
10
15
20
25
30
35
40
45
50
W ()
Figura 2.6
Tipico andamento della varianza della tolleranza relativa di resistori ad impiantazione ionica in
funzione della larghezza W (L>>W)
Come già detto, l’altro, e in genere più importante, contributo a VOS dovuto alla dispersione
relativa dei valori di IS mostra anch’esso una dipendenza dalle dimensioni più o meno marcata a
seconda della tecnologia.
21
L’AMPLIFICATORE OPERAZIONALE
La figura 2.7 mostra, a titolo di esempio, nel caso di impiantazione ionica, un possibile
I
andamento di I s S in funzione dell’area di emettitore A
IS
Anche in questo caso – impiantazione ionica – viene messa in particolare evidenza la
dipendenza dalle dimensioni geometriche; l’area al di sotto della quale (20-25 2) diviene
preponderante il contributo geometrico risulta comunque decisamente piccola e caratterizza
tipicamente transistori per alta frequenza utilizzanti tecnologie al polisilicio.
s (°/°°)
18
16
14
12
10
8
6
4
2
0
0
10
20
30
40
50
60
70
80
2
A ( )
Figura 2.7
Tipico andamento della varianza della tolleranza relativa della corrente di saturazione inversa IS in
funzione dell’area di emettitore per transistori a impiantazione ionica
Un approccio differente alla riduzione dell’offset di tensione è costituito dall’utilizzo di
tecniche di correzione dell’offset prodotto intrinsecamente dalla struttura. Nel caso di carico resistivo
risulta evidente che una correzione può essere introdotta tramite un intervento sul valore relativo dei
resistori atto a introdurre una componente di VOS di segno opposto a quello di partenza. Anche nel caso
di carico attivo tale approccio può essere seguito introducendo allo scopo nella struttura dei resistori in
posizioni circuitali adatte; ad esempio nel caso di carico a specchio si possono introdurre dei resistori di
degenerazione (in serie agli emettitori) che possono essere utilizzati per controllare il fattore di
specchio. E’ evidente che tale correzione deve essere effettuata per ogni singolo esemplare.
Questo approccio si può distinguere in due differenti modalità.
Intervento esterno; si veda la figura 2.8.
A sinistra nella figura viene mostrato lo stadio di ingresso di un amplificatore
operazionale, il 725, immesso sul mercato in tempi ormai lontani (ma ancora in produzione) e
progettato a suo tempo, per essere un amplificatore “di precisione”, utilizzando la tecnologia
22
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
bipolare standard allora disponibile. Il carico passivo è spezzato in due resistori in serie R1 e R2
e sono resi disponibili all’utente, nella piedinatura del dispositivo incapsulato, i terminali
corrispondenti ai punti A tra i quali può essere inserito un potenziometro con il cursore
connesso con la tensione di alimentazione. In tal modo ai resistori R2 vengono poste in parallelo
frazioni complementari della resistenza totale del potenziometro che possono essere variate sino
ad ottenere una compensazione dell’offset (entro i limiti della risoluzione del potenziometro).
741
725
+VCC
potenziometro esterno
Q8
100k
+VCC
1k
R2
2k
R1
IN
IN
Q2
Q1
R 2 1k
A
A
Q4
Q3
R 1 2k
VOUT
OUT
Q7
IN
Q1
Q2
IN
Q5
2I
-VCC
1k
R
Q6
R1
R 1k
-VCC
100k
potenziometro esterno
Figura 2.8
Correzione dell’offset tramite potenziometro esterno: a sinistra con carico passivo (amplificatore
725), a destra con carico attivo a specchio (amplificatore 741)
A destra viene mostrato lo stadio di ingresso dell’amplificatore operazionale 741,
anch’esso immesso sul mercato in tempi ormai lontani e ancora in produzione, e anch’esso
progettato utilizzando la tecnologia bipolare standard allora disponibile. Lo specchio di carico è
degenerato tramite i resistori R, non allo scopo di ridurre il rumore (il loro valore è del tutto
insufficiente a tale scopo), ma per consentire dall’esterno un controllo dell’offset: sono resi
disponibili all’utente, nella piedinatura del dispositivo incapsulato, i terminali corrispondenti
agli emettitori di Q5 e Q6 tra i quali può essere inserito un potenziometro con il cursore
connesso con la tensione di alimentazione (si veda la figura). In tal modo ai resistori R vengono
poste in parallelo frazioni complementari della resistenza totale del potenziometro che possono
essere variate sino a ottenere una compensazione dell’offset (entro i limiti della risoluzione del
potenziometro).
Questa tecnica peraltro presenta un problema: il coefficiente di temperatura del potenziometro
esterno non è in accordo con quello dei resistori integrati con cui esso interagisce e quindi la
dipendenza dalla temperatura dell’offset (si veda la successiva trattazione in merito) ne viene
23
L’AMPLIFICATORE OPERAZIONALE
influenzata negativamente. In molte applicazioni questo parametro è particolarmente importante in
quanto una cancellazione dell’offset con qualsiasi tecnica è riferita ad una determinata temperatura di
lavoro e quindi, a meno di utilizzare tecniche di cancellazione e tracking termico assai complesse,
risulta di scarsa utilità.
Compensazione on chip.
Resistori a film sottile possono essere controllati per quanto riguarda il valore della resistenza
tramite un processo di “trimming”, cioè tramite una regolazione fine delle loro caratteristiche
geometriche, ad esempio la larghezza. Tale regolazione può essere ottenuta utilizzando un fascio laser
che effettua una “erosione” dello strato resistivo controllata da un sistema ad anello chiuso che misura
il parametro da ottimizzare – nel nostro caso l’offset di tensione – e termina il processo quando il
valore del parametro rientra in una fascia determinata di fatto dalla risoluzione del processo stesso.
Facendo riferimento agli esempi utilizzati nel caso precedente, e immaginando che i resistori
siano a film sottile (il che richiede una tecnologia assai più avanzata di quella disponibile al tempo del
progetto e della produzione del 725 e del 741), uno dei due resistori della coppia viene ad esempio
progettato con un valore lievemente differente da quello dell’altro e poi regolato mediante laser
trimming sino ad ottenere il miglior risultato per il parametro da controllare, qui VOS. Il trimming viene
effettuato per ogni singolo chip quando ancora i singoli dispositivi si trovano sul wafer di partenza e
garantisce quindi una produzione assai uniforme. E’ questa una tecnica assai potente, di costo
abbastanza modesto, che consente di ottenere offset di tensione nel campo delle decine di V, ad
esempio 30-50 V. E’ di particolare utilità nel caso di tecnologie che comportano intrinsecamente
offset elevati (dispositivi di ingresso a effetto di campo).
Una tecnica alternativa, oggi meno utilizzata, è quella denominata “Zener-zap”.
Il resistore di cui si vuole effettuare il “trimming” della resistenza è realizzato tramite un
elemento R0, caratterizzato dalla parte principale della resistenza totale, con in serie una sequenza di
resistori di valore R1, R2 … Rn in successione binaria e con valore complessivo della resistenza piccolo
rispetto al totale. In parallelo a ciascun resistore Ri è posto un interruttore SWi (figura 2.9).
Gli interruttori possono essere del tipo “normally on (n-on)”, cioè inizialmente chiusi, oppure
“normally off (n-off)”, cioè inizialmente aperti. Nel primo caso si tratta di fusibili costituiti da
collegament in Al che possono venire selettivamente aperti tramite elevati impulsi di corrente. Nel
secondo caso si tratta di diodi Zener che possono venire permanentemente cortocircuitati tramite
elevati impulsi di corrente inversa (a questo caso si riferisce il termine Zener-zap).
R0
R1
SW1
R2
Rn
SW2
SWn
Figura 2.9
Correzione dell’offset tramite tecnica di “zapping”
Essendo i resistori di regolazione disposti secondo una sequenza binaria la risoluzione ottenuta
corrisponde a 2n, dove n è il numero di resistori. Il sistema richiede l’implementazione on-chip di una
logica atta a controllare gli interruttori (memoria read-only), ma risulta comunque di costo piuttosto
basso a fronte dei risultati ottenibili: offset di tensione nel campo delle decine di V.
Si noti che, almeno in linea di principio, la tecnica dello zapping può essere utilizzata anche con
resistori a diffusione o impiantazione ionica.
24
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
Ovviamente con queste tecniche, sia laser trimming sia zapping, si evita il problema del
deterioramento del coefficiente di temperatura in quanto i resistori utilizzati sono tutti integrati.
Dipendenza di VOS dalla temperatura (offset drift).
dVOS
. Nel
dT
caso qui considerato di uno stadio utilizzante BJT e carico resistivo, è possibile, con adeguato layout,
ottenere un buon tracking termico tra i resistori e le correnti IS di saturazione inversa. Di conseguenza il
drift termico è dovuto sostanzialmente soltanto alla dipendenza dalla temperatura della tensione termica
VT.
dVOS
V
dVOS VOS dVT VOS
V
VOS
e, a 300K
cioè 3, 3
per ogni mV di offset
3,3 C
C
dT
VT dT
T
dT
mV
Come già detto è di particolare importanza il coefficiente di temperatura dell’offset
STADIO JFET CON CARICO PASSIVO
Lo stadio è mostrato nella figura 2.10.
Come nel caso dello stadio BJT, anche se in misura un poco minore, è ragionevole basarsi
sull’ipotesi che le correnti nei due rami dello stadio siano determinate soltanto dalla relazione
VOUT 0
RD1I D1 RD 2 I D 2
Si può quindi scrivere
I D1
ID2
VOS VGS 1 VGS 2 VP1 1
VP 2 1
I DSS 1
I DSS 2
25
L’AMPLIFICATORE OPERAZIONALE
2I =
D1
IN
J1
D1+ I D2
I D2
J2
IN
VOUT
R D1
R D2
Figura 2.10
Offset di tensione: stadio differenziale con transistori a effetto di campo a giunzione e carico passivo
dove VP è la tensione di pinch off e IDSS la corrente di drain in regione di saturazione con VGS=0 e si è
utilizzata la rappresentazione analitica semplificata (trascurando l’effetto Early) della caratteristica di
trasferimento di un JFET, cioè
2
V
I
2
I D I DSS 1 GS DSS2 VP VGS
VP
VP
æ
V GS = V P ççç1 çè
ö
ID ÷
÷
÷
÷
I DSS ø
Ponendo come nel caso precedente per ogni grandezza X
X
X
X X2
X1 X
X2 X
X 1
con
X X1 X 2
2
2
2
l’espressione precedente può essere validamente approssimata da una relazione lineare ottenuta dallo
sviluppo in serie di Taylor in cui si trascurino i termini di ordine superiore al primo.
V 1 I D RD I DSS
VP
1 I D RD I DSS
V
V
VOS VP
VP
2 P VP P
2 P 2.6
VP
2 I DSS RD
I DSS
VP
2 I DSS RD
I DSS
VP
VP
2.6
La relazione è ovviamente riferita al singolo esemplare e rappresenta solamente il primo, pur significativo, passo per
giungere alla caratterizzazione statistica della popolazione di interesse, la sola avente un significato.
Il caso corrispondente a ID=IDSS, singolare in quanto, in una lettura acriticamente matematica, escluderebbe
apparentemente la dipendenza di VOS dalla dispersione di VP , è di fatto sostanzialmente assurdo e privo di attinenza
con un’analisi in termini di dispersione dei parametri e comunque, evidentemente, ha significato (anche se, in realtà,
rappresenta comunque un caso con probabilità, a rigore, nulla) solo per singoli esemplari, individualmente considerati.
26
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
Il primo termine mostra che la dispersione relativa dei valori di VP interviene direttamente e con
peso proporzionale a VP stesso nel determinare l’offset. Il secondo termine, di struttura alquanto
complessa se si esplicitano le dispersioni relative di IDSS e VP in funzione dei parametri fisici e
tecnologici che li determinano, è anch’esso proporzionale a VP. Un confronto con il risultato ottenuto
per lo stadio bipolare mostra quindi immediatamente come l’offset dovuto all’utilizzazione di
transistori JFET stia a quello introdotto dai BJT, come ordine di grandezza, secondo il rapporto
VP
VT
che, a 300 K, è dell’ordine di qualche decina. L’uso di dispositivi FET (come mostrato in seguito un
risultato del tutto analogo si ottiene nel caso dei MOSFET) comporta quindi, a fronte di una resistenza
di ingresso diversi (JFET) o anche molti (MOS) ordini di grandezza più elevata e di errori in continua
relativi alle correnti di ingresso estremamente più piccoli, un notevole deterioramento dell’offset di
tensione intrinseco rispetto al caso dei BJT.
Introducendo le varianze onde descrivere la popolazione da un punto di vista statistico
(trascurando anche qui gli errori sistematici, come è sostanzialmente lecito fare, anche se questi
risultano in generale più elevati che non nel caso di dispositivi BJT), si ottiene
1 ID
VOS VP V2P
R2D I2DSS 4 V2P
4 I DSS
Il secondo termine dipende direttamente dalla corrente di lavoro ID e, con gli usuali valori della
dispersione di RD, IDSS e VP, potrebbe essere reso trascurabile utilizzando correnti molto piccole
rispetto a IDSS: ciò peraltro, tranne in casi molto particolari, risulta di fatto non praticabile in quanto
comporterebbe pregiudizio del rumore serie e della risposta in frequenza; inoltre negli stadi di ingresso
utilizzanti JFET conviene progettare i dispositivi con una IDSS poco superiore alla corrente di lavoro ID
onde minimizzare l’occupazione di area (Si) da parte degli elementi attivi: ciò è reso possibile dal fatto
che la dinamica di corrente necessaria per gestire il segnale è assai piccola rispetto a IDSS.
Tornando all’espressione di VOS in termini di , e cioè a quella applicabile al singolo
dispositivo, si può osservare che il secondo termine, con opportuni interventi di trimming, può essere
utilizzato per compensare, almeno parzialmente, il primo. Una compensazione dell’offset tramite
trimming risulta spesso l’unico intervento risolutivo in quanto le strutture reali, per varie ragioni
(guadagno, CMRR, Slew Rate, ecc.) sono di maggior complessità rispetto a quella di base qui
considerata e utilizzano solitamente un carico attivo, introducendo così ulteriori contributi all’offset che
possono anche risultare dominanti.
Si noti che VOS può essere espresso anche nella forma
R
I
I
V
I R
V
1
VOS VP VP VGS D DSS 2 P VP D D DSS 2 P
2
I DSS
VP
gmJ RD
I DSS
VP
RD
dove il fattore moltiplicativo del secondo termine è stato ricondotto alla forma
ID
1
VP VGS
dove gmJ è la transconduttanza del JFET
g mJ 2
Si evidenzia così che all’offset contribuiscono due termini, mentre nel caso della analoga struttura
utilizzante transistori bipolari è presente solamente il secondo termine, e che il secondo termine è
caratterizzato nel caso dei JFET da un fattore moltiplicativo
Esso implica che la corrente di lavoro ID imposta dalla polarizzazione (da considerarsi quindi una grandezza
“sistematica” nella presente trattazione) uguagli la corrente IDSS in ciascuno degli elementi della coppia e quindi che le
due IDSS siano uguali: è quindi ovvio che in tale caso, del tutto singolare, V OS sia nullo.
27
L’AMPLIFICATORE OPERAZIONALE
1
VP VGS solitamente assai maggiore di VT=26mV che caratterizza i BJT
2
Inoltre, come già notato, tale fattore moltiplicativo dipende dalla corrente e varia proporzionalmente
alla radice della stessa.
La varianza di RD è in genere trascurabile rispetto a quella delle grandezze che caratterizzano il
dispositivo attivo.
I parametri caratteristici del dispositivo che determinano la varianza di VP sono il drogaggio N
del canale (regione di base della tecnologia planare bipolare), lo spessore (o profondità) z del canale, il
potenziale di barriera 0 della giunzione gate-source che dipende a sua volta dai drogaggi di gate e di
canale. Un modello alquanto semplificato del dispositivo reale che considera il dispositivo simmetrico,
con drogaggio uniforme del canale, canale poco drogato rispetto al gate (il che avviene solo con
riferimento al top gate, si veda la nota 2.9), assenza di effetti di bordo … fornisce
q
z2
VP
N A 0
2
4
N A ND
0 VT ln
ni2
dove
q = 1,6 10-19 Coulomb
carica dell’elettrone
10
-3
ni= 1,45 10 cm
concentrazione di portatori nel Si intrinseco a 300 K
= 1,05 10-12 C2/N m
costante dielettrica del Si
-3
NA
cm
densità di droganti nel canale, avendo considerato un
dispositivo a canale p che è il caso tipico essendo il canale
derivato dalla regione di base del transistore bipolare
standard n-p-n 2.7
z
profondità (spessore) effettiva del canale
Il parametro dominante risulta essere la profondità z del canale in quanto si tratta di una
grandezza geometrica difficilmente controllabile dalla tecnologia essendo ortogonale e non parallela al
piano della tecnologia planare stessa. In prima e alquanto grossolana approssimazione si può quindi
scrivere
VP
z q
z 2 z
VOS VP
2 VP 0
NA
VP
z
4 z
avendo considerato soltanto il primo termine di VOS e attribuito l’offset unicamente alla dispersione di
z. Il fatto che nella precedente espressione, pur approssimata, la profondità del canale interviene
quadraticamente mette in particolare evidenza come l’offset sia sostanzialmente determinato da questo
parametro il cui controllo è possibile entro limiti modesti anche con le tecnologie più avanzate. Ciò
rende ragione già di per sé del fatto che impiegando dispositivi JFET l’offset di tensione risulta
nettamente più elevato di quello ottenibile con dispositivi BJT.
In realtà non può in genere essere considerato trascurabile il contributo all’offset del secondo
termine nella espressione più addietro scritta
R
I
I D RD I DSS
V 1
V
2 P VP VGS D DSS 2 P
gmJ RD
I DSS
VP 2
I DSS
VP
RD
e interviene quindi anche la dispersione di IDSS.
2.7
JFET a canale n sono disponibili nelle attuali tecnologie BiFet in quanto queste rendono spesso disponibili BJT p-n-p
verticali (tecnologie “true complementary”)
28
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
I parametri caratteristici del dispositivo che determinano la varianza di IDSS sono il drogaggio N
del canale (regione di base della tecnologia planare bipolare), il rapporto di forma W/L (W larghezza
effettiva di gate, L lunghezza effettiva del canale), il potenziale di barriera 0 della giunzione gatesource che, come sopra ricordato, dipende a sua volta dai drogaggi di gate e di canale. Un modello, pur
alquanto semplificato, del dispositivo reale fornisce una espressione piuttosto complessa di IDSS entro
cui domina la presenza di VP e ne risulta che la profondità del canale z compare alla terza potenza,
risultando così ancora una volta questo il parametro dominante dal punto di vista della dispersione.2.8
Va ricordato che i dispositivi JFET derivati dalla tecnologia bipolare standard possono essere
realizzati per diffusione o tramite ion implantation. In ogni caso è necessario un raffinamento della
tecnologia di base poiché questa non è in grado di produrre un canale di profondità sufficientemente
piccola da dar luogo a tensione di pinch-off VP utilizzabili (cioè di valore non eccessivo): lo spessore di
base di un normale transistore n-p-n ottenuto per diffusione (tipicamente da 0,5 a qualche ) darebbe
luogo a valori di VP di molti volt, addirittura confrontabili con le tensioni di alimentazione e quindi
inaccettabili.
Nel caso di realizzazione per diffusione è necessario introdurre localmente, dove si vuole
realizzare il dispositivo JFET, un’ulteriore passo di diffusione. Ad esempio dopo la diffusione di base
si effettua localmente una predeposizione di gate seguita da diffusione n+ di gate (top gate 2.9) e quindi
dalla normale diffusione di emettitore (JFET a doppia diffusione); si ottiene così uno “strozzamento”
della regione di base di partenza e cioè una struttura del tutto simile a quella di un base pinch resistor.
In tal modo la profondità del canale può essere ridotta sino ad ottenere valori accettabili di VP. Si può
anche procedere tramite doppia diffusione di base anziché di emettitore. I dispositivi che così si
ottengono presentano per VP valori nel campo di alcuni volt, cioè piuttosto elevati, forte dispersione a
causa dello scarso controllo di z possibile per diffusione, bassa tensione di breakdown drain-gate in
quanto questa eguaglia quella di una giunzione base-emettitore, cioè circa 6-7 V, scarso controllo del
canale da parte del gate inferiore, costituito dalla poco drogata regione epitassiale (collettore).
Oggigiorno il procedimento universalmente adottato è quello della impiantazione ionica che
consente un controllo assai più preciso e riproducibile del processo. In particolare è assai migliore il
controllo dello spessore di canale z con il risultato di ottenere VP dell’ordine del volt e con dispersione
assai minore che nel caso di diffusione. Inoltre poiché il drogaggio del canale può essere contenuto con
buona affidabilità entro1016 atomi/cm3 (come nella diffusione di collettore) la tensione di breakdown
drain-gate risulta dell’ordine di alcune decine di volt.
Ripetiamo qui che comunque l’offset di tensione per una coppia JFET è intrinsecamente (cioè
in assenza di interventi correttivi) significativamente più elevato che nel caso della coppia bipolare,
anche perché, come già detto, il secondo termine dell’espressione sopra riportata non è in genere
trascurabile e quindi la dispersione di VP entra in gioco con peso ancor maggiore. Le tecniche di
trimming sono pertanto di particolare interesse in tecnologia BiFET.
Dipendenza di VOS dalla temperatura (offset drift).
2.8
Riportiamo qui tale espressione (per un JFET a canale p) che mostra come intervengano i drogaggi di canale e di gate, la
conducibilità del canale, il rapporto di forma W/L, il potenziale di barriera 0 e la tensione di pinch–off VP
1/ 2
I DSS
W 2
ND
2
L q N A N A N D
2
1/ 2
3/ 2
VP 0 VP 0 VP 0
3
2.9
Il JFET ottenuto a partire dalla tecnologia bipolare è caratterizzato da un canale compreso tra due regioni che, collegate
tra di loro attraverso la metallizzazione, fungono da gate: la regione corrispondente all’emettitore (top gate) e quella
corrispondente al collettore (bottom gate) del normale transistore bipolare verticale.
29
L’AMPLIFICATORE OPERAZIONALE
Anche in questo caso, con adeguato layout, è possibile ottenere un buon tracking termico tra i
resistori. Di conseguenza il drift termico è dovuto sostanzialmente alla dipendenza dalla temperatura
della tensione di pinch-off VP e della corrente IDSS. Ambedue queste grandezze sono caratterizzate da
un elevato coefficiente di temperatura, anche se di segno opposto.
Il coefficiente di temperatura di IDSS deriva principalmente da quello della mobilità dei portatori
ed è quindi negativo; quello di VP deriva da 0, che decresce al crescere della temperatura, e quindi,
considerata la dipendenza di VP da 0, è positivo. In ogni caso la dipendenza dalla temperatura di VOS
è piuttosto complessa è non risulta di fatto possibile collegare dVOS/dT in maniera semplice a VOS
come invece avviene nel caso dei dispositivi bipolari.
Concludendo, per ottenere buoni risultati con stadi differenziali utilizzanti JFET è necessario ricorrere a
tecniche di impiantazione ionica, utilizzare, se possibile, correnti di lavoro relativamente basse rispetto
a IDSS, eventuali resistori di alta qualità (a film sottile). Come già più volte menzionato la tecnica
risolutiva risulta essere quella di trimming laser che consente di ottenere risultati confrontabili con
quelli (intrinsecamente) ottenibili con transistori bipolari: VOS nel campo delle centinaia di V e
dVOS/dT nel campo dei V/°C.
STADIO MOSFET CON CARICO PASSIVO
Lo stadio è mostrato nella figura 2.11.
Anche in questo caso è ragionevole basarsi sull’ipotesi che le correnti nei due rami dello stadio
siano determinate soltanto dalla relazione
VOUT 0
Si può quindi scrivere
2 I D1
2 I D 2
VOS VGS 1 VGS 2 Vt1
Vt 2
' W
' W
k
k
1
2
L 1
L 2
dove Vt è la tensione di soglia, W/L è il rapporto di forma, k’ = COX ( mobilità, Cox capacità
specifica dell’ossido).
30
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
R D1
R D2
VOUT
D1
IN
M1
I D2
M2
2I =
IN
D1+ I D2
Figura 2.11
Offset di tensione: stadio differenziale con transistori a effetto di campo MOS e carico passivo
Si è utilizzata la rappresentazione analitica semplificata (trascurando l’effetto Early) della
caratteristica di trasferimento di un MOS, cioè
2I D
1 W
2
I D k ' VGS Vt
VGS Vt
W
2 L
k'
L
Ponendo come nei casi precedenti per ogni grandezza X
X
X
X X2
X1 X
X2 X
X 1
con
X X1 X 2
2
2
2
l’espressione precedente può essere validamente approssimata da una relazione lineare ottenuta dallo
sviluppo in serie di Taylor in cui si trascurino i termini di ordine superiore al primo.
W
W
Vt 1 2 I D RD
V
2
I
R
1
D
VOS Vt
L Vt t
D L
W
W
W
W
Vt
2
2Vt
Vt
RD
RD
k'
k'
L
L
L
L
W
W
VGS Vt RD
I
R
Vt
L Vt D D L
W
W
2
g mM RD
RD
L
L
relazione del tutto simile a quella ottenuta nel caso dei JFET: la dispersione della tensione di
soglia sostituisce quella della tensione di pinch-off, la dispersione del fattore di forma sostituisce la
dispersione combinata della tensione di pinch-off e della corrente IDSS.
Il primo termine mostra che la dispersione dei valori di Vt interviene direttamente nel
determinare l’offset. Un confronto con il risultato ottenuto per lo stadio bipolare mostra quindi
immediatamente come l’offset dovuto all’utilizzazione di transistori MOSFET stia a quello introdotto
dai BJT, come ordine di grandezza, secondo il rapporto
31
L’AMPLIFICATORE OPERAZIONALE
Vt
VT
che, a 300 K, è dell’ordine di parechie decine. L’uso di dispositivi MOSFET comporta quindi, a fronte
di una resistenza di ingresso molti ordini di grandezza più elevata e di errori in continua relativi alle
correnti di ingresso estremamente più piccoli, un notevole deterioramento dell’offset di tensione
intrinseco rispetto al caso dei BJT. Con le moderne tecniche litografiche, dispositivi di dimensioni non
piccole, accurato layout, grande attenzione alla “pulizia” del processo si può ottenere un
accoppiamento delle tensioni di soglia entro qualche mV (1-3 mV) il che comporta pur sempre un
offset circa un ordine di grandezza più elevato di quello caratterizzante i BJT.
Introducendo le varianze onde descrivere la popolazione da un punto di vista statistico
(trascurando anche qui gli errori sistematici, come è sostanzialmente lecito fare, anche se questi
risultano in generale più elevati che non nel caso di dispositivi BJT), si ottiene
1 I
1 V V
VOS Vt 2 D R2D W2 Vt Vt2 2 GS t R2D W2
Vt gmM
Vt
4
L
L
Il secondo termine sotto radice dipende dalla corrente di lavoro ID e, con gli usuali valori della
dispersione di RD, e W/L, potrebbe essere reso trascurabile utilizzando correnti molto piccole, cioè a
pari W/L piccole tensioni VGS-Vt di overdrive: come nel caso del JFET ciò, tranne in casi molto
particolari, risulta di fatto non praticabile in quanto comporterebbe pregiudizio del rumore serie e della
risposta in frequenza.
Va infine notato che, essendo il guadagno ottenibile con un semplice stadio differenziale MOS
piuttosto modesto (significativamente inferiore a quello ottenibile utilizzando transistori bipolari), non
è sempre trascurabile il contributo derivante dallo stadio successivo, contributo che può essere
caratterizzato da una non trascurabile componente sistematica.
2
2
2
Vt
Dipendenza di VOS dalla temperatura (offset drift).
Come già detto, con adeguato layout, è possibile ottenere un buon tracking termico tra i
resistori. Di conseguenza il drift termico è dovuto principalmente alla dipendenza dalla temperatura
della tensione di soglia Vt, ma intervengono anche altri parametri (ad esempio la mobilità contenuta in
k’) e la dipendenza dalla temperatura di VOS risulta piuttosto complessa e di fatto non è possibile
collegare dVOS/dT in maniera semplice a VOS come invece avviene nel caso dei dispositivi bipolari.
Conclusione
A conclusione possiamo notare che un confronto tra i vari dispositivi considerati mostra che
l’espressione dell’offset di tensione VOS può essere considerata costituita da due termini, di cui il primo
non dipende dalla corrente di lavoro; è cioè del tipo (a parte i segni)
I
VOS V*
gm
Transistori utilizzati
V*
I/gm
BJT
JFET
MOS
Assente
VP
Vt
VT
(VP-VGS)/2
(VGS-Vt)/2
Dunque
32
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
nel caso del transistore bipolare è assente il primo termine e anche il coefficiente del
secondo non dipende dalla corrente di lavoro
nel caso dei transistori a effetto di campo, sia JFET che MOS, è invece presente un primo
termine non controllabile tramite la corrente di lavoro (cioè “fisso” e quindi comunque
presente) e il secondo termine dipende dalla corrente di lavoro tramite la radice della
corrente stessa
a pari corrente i dispositivi a effetto di campo presentano una transconduttanza tipicamente
di un ordine di grandezza inferiore a quella dei BJT e quindi I/gm
26 mV (T=300K) per transistori bipolari
100 – 500 mV, tipicamente, per transistori a effetto di campo, con i valori
più alti per i MOS
STADIO DIFFERENZIALE BJT CON CARICO ATTIVO
Consideriamo uno stadio in tecnologia BJT con carico a specchio semplice. Lo stadio è
mostrato nella figura 2.12. Strutture dello stesso tipo in altre tecnologie possono essere trattate in modo
analogo con risultati che differiscono quantitativamente in dipendenza dalla tecnologia adottata.
Vogliamo qui mettere soprattutto in evidenza l’effetto del carico attivo, in particolare a specchio.
Ricordiamo che il carico a specchio è per sua natura di per sé fortemente asimmetrico. Peraltro
tale asimmetria è vista dal generatore di polarizzazione, coda dello stadio, attraverso le resistenze di
Early dei transistori di ingresso e influenza quindi, in genere, in misura modesta lo stato di
polarizzazione. Lo stesso dicasi delle altre asimmetrie di origine tecnologica. Di conseguenza, almeno
in prima e sostanzialmente valida approssimazione, i vari contributi all’offset di tensione si possono
considerare indipendenti e valutare separatamente.
Nel caso in esame si possono distinguere, per quanto riguarda il carico, fondamentalmente due
contributi all’offset di tensione dello stadio: un contributo statistico dovuto alla dispersione dei
parametri caratterizzanti i transistori Q3 e Q4 ( la corrente di saturazione inversa e la tensione di Early)
e un contributo sistematico dovuto principalmente all’errore associato al fattore di specchio per effetto
delle correnti di base (guadagno di corrente hFE dei transistori finito).
Q4
Q3
IN
Q1
C3
C4
C1
C2
Q2
OUT
IN
2I
Figura 2.12
Offset di tensione: stadio differenziale BJT con carico a specchio semplice
33
L’AMPLIFICATORE OPERAZIONALE
In condizioni di perfetta simmetria e di assenza di effetti sistematici (hFE infinito) e quindi di
offset nullo, con gli ingressi equipotenziali, oltre alla relazione di specchio
VBE 3 VBE 4
deve valere la relazione
VCE 3 VCE 4
Tale relazione nel caso reale è rispettata solamente quando viene applicata in ingresso una
differenza di potenziale tale da produrla (offset di tensione) ed è quindi utilizzabile per determinare
l’offset stesso.
Trascurando, in prima approssimazione, l’effetto Early (approssimazione valida per VA>>VCE),
la condizione di uguaglianza delle VBE dello specchio conduce evidentemente alla relazione
IC 4 I S 4
IC 3 I S 3
Trascurando l’effetto Early anche nei transistori di ingresso ed applicando una tensione
differenziale VOS si ha
I I
I I
2
VOS VT ln C1 S 2 VT ln S 2 S 3 1
I S1 I S 4 hFEp
I S1 IC 2
dove si sono imposte le condizioni
IC 2 IC 4
2
I C1 I C 3 1
hFEp guadagno medio di corrente dei transistori pnp dello specchio
h
FEp
Procediamo come al solito ponendo
X
X
X X2
X1 X
X2 X
X 1
con
2
2
2
X
1. Possiamo così scrivere
e consideriamo gli scostamenti relativi
X
I
I
2
VOS VT Sp Sn
I
I
h
Sp
Sn
FEp
relazione lineare ottenuta dallo sviluppo in serie di Taylor del logaritmo in cui si trascurino i
termini di ordine superiore al primo (i deponenti p e n indicano i transistori rispettivamente pnp e npn).
In termini di varianza la componente statistica risulta data da
V
OS
VT I2Sn I2Sp
Come si vede l’offset statistico sostanzialmente aumenta di circa il 50% rispetto a quello dovuto
ai soli elementi di ingresso.
E’ poi presente un contributo sistematico spesso non trascurabile, rappresentato dal termine
2
VOS VT
hFEp
Ad esempio, nel caso dello stadio rappresentato nella figura 1.20 dove lo specchio è costituito
da transistori pnp, per guadagno medio hFEp=20 tale contributo ammonta (in media) a 2, 6 mV a
T=300K. Naturalmente, se lo specchio fosse costituito da transistori npn (ovviamente in uno stadio di
struttura diversa), l’errore sistematico sarebbe assai inferiore, anche se non del tutto trascurabile: 210
V per guadagno medio hFEn=250.
E’ presente in realtà un altro errore sistematico connesso con il fatto che tra il pozzo dello
specchio e il generatore di corrente Q1 si ha partizione di corrente per cui la frazione specchiata della
corrente prodotta dal segnale di ingresso è data da
34
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
g mQ 3
VT
g mQ 3 g C1
VA1
Quest’ultimo contributo è solitamente di peso trascurabile negli stadi BJT, ma può avere effetto
in stadi CMOS caratterizzati da transconduttanza significativamente inferiore e bassa tensione di Early
(si veda più avanti la trattazione relativa alla reiezione del modo comune).
Non si è tenuto conto del contributo statistico della dispersione di hFEp; in effetti tale contributo
risulta trascurabile in quanto è dato da
1 hFEp
2VT
hFEp hFEp
1
Il contributo statistico del carico può essere ridotto degenerando lo specchio tramite resistori di
emettitore (si noti anche qui l’analogia con il caso del rumore), mentre quello sistematico può essere
corretto utilizzando specchi caratterizzati da errore inferiore, ad esempio Wilson o a correzione di
corrente di base.
Si consideri il caso di carico a specchio Wilson con degenerazione di emettitore riportato nella
figura 2.13.
Purché il guadagno di corrente hFEp sia sufficientemente grande rispetto all’unità, si può scrivere
VBE 3 IC 3 R3 VBE 4 IC 4 R4
e, utilizzando il solito procedimento, si ottiene
I C
I S
g R R
1
m
IC 1 gm R I S 1 gm R R
R3
Q3
R4
Q4
Q5
OUT
IN
Q1
Q2
IN
2I
Figura 2.13
Carico a specchio Wilson con degenerazione di emettitore
35
L’AMPLIFICATORE OPERAZIONALE
Poiché in generale, come già visto, si può ottenere
R I S
R
IS
la degenerazione di emettitore risulta vantaggiosa solamente se
g m R 1
condizione di fatto difficile da realizzare.
In conclusione si può affermare che il carico attivo è di per sé svantaggioso rispetto a quello
passivo (si noti l’analogia con il caso del rumore).
Notiamo con l’occasione che l’introduzione di strutture cascode non comporta di per sé ulteriori
apprezzabili contributi all’offset di tensione in quanto i transistori trasferitori di corrente intervengono
attraverso la dispersione del loro hFB ()
hFB
1 hFE
hFB
hFE hFE
che risulta in generale trascurabile rispetto ad altri contributi (ancora una volta si noti l’analogia con il
caso del rumore).
STADIO DIFFERENZIALE MOS CON CARICO ATTIVO
Consideriamo ora uno stadio analogo al precedente, ma in tecnologia MOS. Lo stadio è
rappresentato nella figura 2.14.
La trattazione può essere svolta sulla falsariga di quella relativa allo stadio bipolare. Anche qui
si possono scrivere le relazioni
VGS 3 VGS 4
VDS 3 VDS 4
M3
M4
VOUT
ID
IN
M1
ID
M2
IN
2I D
Figura 2.14
Stadio differenziale MOS con carico attivo a specchio
36
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
Da queste, procedendo come nel caso precedente si giunge alla relazione approssimata
W
W
VGS Vt n
L p
L n Vtp
VOS Vtn
W
2
W
VGS Vt p
L n
L p
2
Si noti che il primo termine è quello già visto relativo al mismatch delle tensioni di soglia degli
elementi di ingresso e che nel secondo termine compaiono le tensioni di overdrive VGS-Vt.
L’espressione ottenuta è da confrontare con quella derivata nel caso di carico passivo: in
particolare il carico è rappresentato dal primo termine tra parentesi tonde che sostituisce RD/RD e
mostra che il carico attivo può giocare un ruolo importante nel contribuire all’offset.
Non è presente un contributo sistematico funzionale connesso con il fattore di specchio essendo
le correnti di gate del tutto trascurabili. Può però avere effetto, come già notato discutendo la struttura
utilizzante transistori bipolari, la partizione di corrente tra M1 e M3, considerata la transconduttanza e
la tensione di Early particolarmente basse che caratterizzano dispositivi MOS a canale relativamente
corto.
37
L’AMPLIFICATORE OPERAZIONALE
2.2 OFFSET DI CORRENTE E RELATIVO DRIFT
STADIO BJT CON CARICO PASSIVO
Lo stadio, il più semplice possibile, è quello mostrato nella figura 1.9. L’offset di corrente è
dato, per definizione, dalla differenza delle correnti di base
I
I
I OS C1 C 2
hFE1 hFE 2
I C RC hFE
hFE RC
hFE
Il termine prevalente è usualmente il secondo, anche con resistori diffusi, e quindi, in prima
approssimazione
h
I OS
I B FE
hFE
Nei sistemi che non utilizzano tecniche di compensazione della corrente di polarizzazione
(corrente di bias) l’offset di corrente è perciò dell’ordine di
IOS 0,05 0,1 I B
Quando invece vengono utilizzate tali tecniche IB e IOS risultano sostanzialmente dello stesso
ordine poiché gli errori nella compensazione, in generale incorrelati con la dispersione delle correnti di
partenza, hanno come conseguenza una riduzione assai maggiore delle correnti di polarizzazione stesse
che non del loro offset: ciò risulta particolarmente evidente se si considera il caso limite di una
compensazione quasi perfetta.
La dipendenza dalla temperatura discende principalmente dal contributo di hFE il cui
coefficiente di temperatura è non lineare (dipende dalla temperatura oltre che dalla corrente di lavoro) e
di andamento piuttosto complesso, non rappresentabile in forma analitica semplice, dell’ordine di
0,7%/°C nell’intorno della temperatura ambiente e per correnti nella regione di guadagno massimo. Il
drift risulta quindi dell’ordine dell’1%/°C di IOS.
e, utilizzando il solito procedimento, si giunge a scrivere
I OS
hFE/hFE T
%
0,18
hFE
450
hFE
0,16
400
0,14
350
0,12
300
0,10
250
0,08
200
hFE /hFE T
%
150
100
-75
0,06
0,04
-50
-25
0
25
50
75
100
125
0,02
150
T (°C)
Figura 2.15
Tipico andamento del guadagno di corrente e del suo coefficiente di temperatura per un BJT npn di
area di emettitore piccola (5-10 2)
38
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
In prima approssimazione, in un campo di alcune decine di gradi (K, °C) attorno alla
temperatura ambiente, il guadagno di corrente cresce linearmente con la temperatura e il suo
coefficiente di temperatura varia quindi inversamente con la temperatura stessa (figura 2.15).
L’effettivo coefficiente di temperatura può essere influenzato anche dalla corrente di lavoro IC,
se il riferimento di corrente che la controlla non è stabilizzato con sufficiente accuratezza nei riguardi
delle escursioni termiche.
Nel caso dei transistori BJT l’offset di corrente può essere ridotto solamente riducendo le
correnti di base (e quindi riducendo la corrente di polarizzazione IC e/o utilizzando transistori a elevato
guadagno) e minimizzando hFE/hFE tramite tecniche avanzate di realizzazione dei dispositivi, in
particolare ion implantation.
STADIO CON INGRESSO JFET
L’offset di corrente risulta essere dello stesso ordine della corrente di polarizzazione di gate IG.
Ciò poiché tale corrente, nei dispositivi realizzati con le attuali tecnologie, possiede una forte (spesso
dominante) componente superficiale e non è soltanto una corrente “di volume” (bulk current), cioè la
corrente inversa di una giunzione. Di conseguenza la dispersione del suo valore risulta molto grande
anche se l’offset risultante risulta comunque molto piccolo rispetto a quello della tecnologia bipolare e
può quindi spesso essere considerato trascurabile.
2I
2I
Q5
I
IN
J1
I
J2
J3
IN
IN
J1
J2
Q6
J4
Q3
Q4
OUT
J5
IN
J6
OUT
J5
J6
Figura 2.16
Utilizzo della struttura cascode, nel caso di ingresso con transistori JFET, onde minimizzare la
dipendenza delle correnti di bias e del loro offset dall’entità del modo comune in ingresso
Essendo la componente superficiale dipendente dalla tensione e cioè da VDS (a
differenza della corrente inversa di bulk che satura), la corrente di gate e il relativo offset dipendono
39
L’AMPLIFICATORE OPERAZIONALE
dallo stato di polarizzazione in tensione degli elementi di ingresso e, in particolare, dalla tensione di
modo comune applicata. L’andamento non è lineare e al di sopra di una soglia critica iniziano a
manifestarsi fenomeni di moltiplicazione dei portatori che determinano un rapido aumento della
corrente parassita. Pertanto quando si desidera limitare a valori molto bassi la corrente di gate, e in
particolare l’offset, è necessario utilizzare strutture circuitali che consentano di limitare la tensione ai
capi dei dispositivi di ingresso indipendentemente dal segnale di modo comune. La più semplice è la
struttura cascode di cui sono mostrati due esempi di implementazione nella figura 2.16
Le correnti di perdita di gate dei dispositivi JFET di ingresso possono venire sensibilmente ridotte
utilizzando particolari tecnologie di realizzazione quale la tecnologia Difet che utilizza un
procedimento di isolamento dielettrico dei gate e impedendo così la formazione di cammini di corrente
parassiti verso le strutture adiacenti: si possono così ottenere correnti di gate di alcune decine di fA. Nel
caso di dispositivi realizzati con questo approccio le caratteristiche di ingresso (resistenza di ingresso,
correnti di bias, offset delle correnti di bias) possono essere sfruttate appieno soltanto con montaggi e
accoppiamenti al circuito esterno molto accurati e in condizioni di lavoro attentamente controllate:
divengono infatti importanti effetti termoelettrici, fluttuazioni termiche, perdite dielettriche, ecc.
40
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
Cap. 3
SLEW RATE
3.1 CONSIDERAZIONI GENERALI
Consideriamo lo slew rate “interno”, cioè la limitazione della velocità di variazione della
tensione di uscita dovuta esclusivamente a elementi interni all’amplificatore; non si considera cioè la
limitazione dovuta a un eventuale capacità di carico esterna, limitazione importante nel caso di
amplificatori che pilotano il carico attraverso la corrente di uscita (in particolare amplificatori CMOS
on-chip del tipo OTA).
Nel seguito si considerano esclusivamente amplificatori caratterizzati da architetture circuitali
“voltage mode” e compensazione alla Miller per cui il limite di slew rate interno è fisicamente dovuto
alla carica lineare della capacità di compensazione Cc , in transitorio, su grande segnale; amplificatori
utilizzanti diverse tecniche di compensazione, quali la compensazione diretta sul principale nodo di
guadagno o altri approcci (amplificatori current feedback mode, amplificatori per strumentazione,
amplificatori video, ecc.) verranno considerati più avanti.
E’ facile mostrare che la configurazione di maggior degrado dello slew rate è quella
corrispondente a retroazione totale (buffer) in quanto la corrente disponibile deve essere utilizzata per
caricare non soltanto la capacità di compensazione, ma anche la capacità associata al generatore di
corrente di polarizzazione dello stadio di ingresso.
In realtà nel caso di retroazione totale e per le strutture più comunemente usate (nella figura 3.1
è rappresentata una struttura bipolare, ma considerazioni del tutto analoghe valgono nel caso di
Q4
Q3
Cc
-
+
Q2
Q1
on
off
2I
A2
vi
v0
+
Ct
Figura 3.1
Configurazione di principio per la determinazione dello slew rate (viene qui considerata una
struttura bipolare)
41
L’AMPLIFICATORE OPERAZIONALE
impiego di dispositivi a effetto di campo) il comportamento del sistema risulta dipendente dalla polarità
del segnale di ingresso: ad esempio per uno stadio di ingresso bipolare npn lo slew rate è peggiore (più
basso) nel caso sia applicato un segnale di prova negativo (o sul fronte di discesa di un segnale di prova
rettangolare) in quanto proprio in questo caso deve essere caricata anche la capacità Ct associata al
generatore di coda dello stadio e quindi lo slew rate diviene
2I
SR
dove 2I è la corrente di polarizzazione dello stadio di ingresso
Cc Ct
e ricordando che il prodotto guadagno banda 0 è dato da
g
0 m1
dove gm1 è la transconduttanza dello stadio di ingresso
Cc
2I
si può scrivere
SR
0
Ct
g m1 1
Cc
Ad esempio nel caso del 741 Cc=30 pF (molto grande, a causa del modesto prodotto guadagno
banda ottenibile in questo caso con la tecnologia bipolare standard), Ct=4pF e 0=13 Mc/s (circa);
quindi SR=0,6 V/s (circa).
Per ottenere lo slew rate migliore è quindi anzitutto necessario, nel caso della struttura
considerata, minimizzare la capacità parassita Ct della coda rispetto alla capacità di compensazione.
Ciò risulta particolarmente difficile in amplificatori dove la capacità di compensazione risulta piccola:
sono questi gli amplificatori ad alta frequenza in cui la capacità di compensazione è piccola per via
dell’elevato prodotto guadagno banda e in genere gli amplificatori utilizzanti in ingresso dispositivi a
effetto di campo e cioè in tecnologia BiFet e CMOS in quanto la loro transconduttanza è piccola e
piccola risulta quindi la capacità di compensazione.
La relazione precedente mostra che lo slew rate è proporzionale al prodotto guadagno banda 0
I
e al rapporto
. La proporzionalità con 0 è di per sé da considerarsi un aspetto positivo in quanto
g m1
significa che banda di (piccolo) segnale e banda di potenza vanno di pari passo. D’altro canto significa
anche che per migliorare le prestazioni in termini di slew rate, a parità di prodotto guadagno banda e
mantenendo strutture circuitali del tipo qui considerato, bisogna agire sul rapporto tra corrente di lavoro
e transconduttanza del primo stadio, cioè ridurre la transconduttanza a parità di corrente.
Nel caso di strutture in tecnologia bipolare, in particolare quello della figura 2.1, cioè nel caso
più semplice, il rapporto in questione è determinato unicamente dai transistori bipolari ed è quindi una
costante pari alla tensione termica VT. Di conseguenza in questo caso lo slew rate non dipende dalla
corrente di lavoro il che, fisicamente, corrisponde al fatto che al variare della corrente di lavoro varia
proporzionalmente la capacità di compensazione.3. 1 Va d’altro canto notato che la corrente di lavoro in
uno stadio di ingresso bipolare è imposta comunque da altre considerazioni, in particolare dalla
resistenza di ingresso.
Nel caso di strutture a effetto di campo la situazione è alquanto diversa poiché il rapporto
considerato tra corrente di lavoro e transconduttanza del primo stadio risulta proporzionale alla radice
quadrata della corrente stessa: quindi lo slew rate può essere migliorato aumentando la corrente. Ciò
peraltro non conduce a miglioramenti particolarmente significativi a causa della debole dipendenza del
rapporto considerato dalla corrente. Inoltre aumentare eccessivamente la corrente di lavoro riduce il
guadagno dello stadio e, in generale, influenza negativamente l’offset di tensione (che peraltro può
essere corretto tramite tecniche di trimming). Il reale vantaggio nell’utilizzo di dispositivi a effetto di
3. 1
In realtà una certa dipendenza viene introdotta proprio dalla presenza della capacità Ct della coda. Infatti il suo peso varia
al variare della capacità di compensazione.
42
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
campo, in particolare MOS, deriva dal fatto che, a pari corrente, la loro transconduttanza è
significativamente inferiore a quella dei dispositivi bipolari: ciò combinato con il fatto che tali
dispositivi, principalmente per ragioni di risposta in frequenza, nello stadio di ingresso, vengono
normalmente fatti lavorare a correnti circa un ordine di grandezza più elevate di quelle impiegate nel
caso dei BJT, consente, a parità di architettura circuitale, di ottenere SR 10-100 volte più elevati.
Ricordiamo che il rapporto tra corrente di lavoro e transconduttanza, compare anche
nell’espressione dell’offset e ciò non a caso. Sia per quanto riguarda l’offset, sia per quanto riguarda lo
slew rate interviene la “sensibilità” in ingresso dello stadio cioè la tensione necessaria per produrre una
certa corrente in uscita: quanto più alta tale tensione caratteristica tanto più alta è la tensione necessaria
in ingresso per portare l’uscita a un certo livello (offset) e tanto più alta è la tensione necessaria in
ingresso per portare il sistema totalmente fuori linearità (slew rate). Tale tensione è data da
Transistori utilizzati
I/gm
BJT
JFET
MOS
VT
(VP-VGS)/2
(VGS-Vt)/2
Nel caso della tecnologia BiFet l’uso di dispositivi JFET, in genere a canale p, come elementi di
ingresso, la disponibilità, nelle versioni più avanzate, di transistori pnp verticali (tecnologie “true
complementary”), di isolamento dielettrico, di resistori a strato permette di ottenere prodotti guadagno
banda nettamente più elevati di quelli ottenibili con la tecnologia bipolare standard (circa un ordine di
grandezza) e conseguentemente uno slew rate più elevato in assoluto e non solo in termini relativi.
Nel caso della tecnologia CMOS la transconduttanza può essere controllata anche attraverso il
rapporto di forma W/L e il rapporto tra corrente di lavoro e transconduttanza si può anche scrivere
I
1
1
I
VGS Vt
g m1 2
2 k' W
L
Va peraltro notato che gli amplificatori CMOS sono spesso amplificatori destinati a pilotare
carichi capacitivi (ad esempio in sistemi a capacità commutate) e/o utilizzati in sistemi a bassa tensione
di alimentazione. Nel primo caso diviene importante lo slew rate “esterno” cioè quello connesso con la
capacità di carico; nel secondo caso, in cui solitamente è richiesta anche bassa dissipazione (sistemi
“micropower”) è necessario, per ragioni di dinamica, lavorare con piccoli valori di VGS-Vt. In questo
ultimo caso i MOS di ingresso vengono fatti lavorare a basse correnti con pregiudizio della risposta in
frequenza e con conseguente prodotto guadagno banda spesso assai modesto; inoltre, come già
ricordato, essendo la transconduttanza molto bassa, la capacità della coda acquista un peso non
trascurabile. Di conseguenza in questi casi lo slew rate risulta molto basso anche parecchio più piccolo
di quello ottenibile in tecnologia bipolare standard.
3.2 TECNICHE DI MIGLIORAMENTO DELLO SLEW RATE CON STADI DI
INGRESSO IN CLASSE A
E’ necessario ridurre la transconduttanza dello stadio di ingresso a pari corrente di lavoro.
La struttura universalmente nota del tipo 741 presenta una transconduttanza che risulta
dimezzata rispetto a quella dei singoli transistori e quindi, a parità di altre condizioni, uno slew rate più
elevato (doppio) di quello che caratterizza lo stadio della figura 2.1.
L’approccio più ovvio è quello di introdurre dei resistori di degenerazione in serie agli
emettitori o ai source dei transistori di ingresso (figura 3.2).
43
L’AMPLIFICATORE OPERAZIONALE
I
IN
Q1
Q2
RE
IN
RE
2I
Figura 3.2
Utilizzo di resistori di emettitore (nel caso BJT) per aumentare lo slew rate
La transconduttanza viene così ridotta in ragione del prodotto gmQRE
1
g m g mQ
1 g mQ RE
dove gmQ è la transconduttanza dei transistori (la stessa relazione vale ovviamente anche nel caso di
dispositivi a effetto di campo)
Per ottenere un significativo miglioramento dello slew rate deve essere gmQRE>>1, condizione
di non facile realizzazione nel caso di bassi valori di gm (basse correnti di lavoro, dispositivi MOS …) e
che comporta, per effetto della dispersione dei valori di RE, un contributo non trascurabile all’offset di
tensione a meno di ricorrere a trimming di compensazione. Utilizzando resistori diffusi di grandi
dimensioni (molto larghi) oppure a impiantazione ionica o a strato e quindi con scarti relativi di
qualche 0/00, valori di gmQRE di 10÷20 producono, nel caso dei dispositivi bipolari, un contributo
all’offset dell’ordine del mV. Infatti lo scarto delle cadute di tensione su RE si può scrivere
RE RE
VRE VRE
g mQ RE VT
RE
RE
per RE/RE pari a 2,5 0/00 e gmQRE = 20 si ha un contributo all’offset di 1,3 mV a 300K.
Nel caso dei dispositivi a effetto di campo la situazione è più complessa; ad esempio nel caso di
strutture MOS
RS
V Vt
VRS
g mM RS GS
RS
2
e quindi il contributo delle resistenze di degenerazione di source RS non risulta esprimibile soltanto
attraverso il prodotto gmMRS, ma interviene anche la tensione di overdrive utilizzata e quindi, a parità di
corrente, il dimensionamento geometrico dei MOS.
Va poi ricordato che, nel caso della tecnologia CMOS, i piccoli valori della transconduttanza
comportano, per ottenere valori di gmMRS sufficientemente elevati, valori assai elevati delle resistenze
RS. Ad esempio nel caso di uno stadio bipolare con corrente di lavoro di 10A gmQRE =10 si ottiene
utilizzando resistori di 26 k; nel caso di uno stadio CMOS la transconduttanza a pari corrente può
essere un ordine di grandezza inferiore a quella del BJT e quindi gmMRS =10 comporta resistenze nel
campo delle centinaia di kche sono ottenibili tramite resistori di well strozzati oppure utilizzando
MOS in regione ohmica, ma con elevata dispersione e quindi forte contributo all’offset.
44
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
Va infine ricordato che l’introduzione dei resistori di degenerazione comporta anche un
contributo al rumore serie in ingresso pari a quello dei resistori stessi. Nel caso dei BJT tale contributo,
riferito a quello dei transistori di ingresso, è dato, in regione bianca, per ciascun resistore da
2 g mQ RE
e risulta quindi quello dominante.
A quanto appena detto va aggiunto che una riduzione della transconduttanza della struttura di
ingresso comporta, sia per quanto riguarda il rumore che per quanto riguarda l’offset, contributi da
parte del carico dello stadio amplificati che quindi possono risultare dominanti.
Concludendo: un apprezzabile miglioramento delle caratteristiche di slew rate attraverso
l’introduzione di resistori di degenerazione (di emettitore o source) si ottiene a costo di un aumento non
trascurabile dell’offset di tensione (peraltro compensabile applicando tecniche di trimming) e un
considerevole aumento del rumore. In realtà tutti gli approcci volti a ridurre la transconduttanza a pari
corrente in stadi in classe A soffrono degli stessi inconvenienti: si pensi ad esempio al caso del 741.
E’ dunque interessante considerare approcci diversi.
3.3 TECNICHE DI MIGLIORAMENTO DELLO SLEW RATE CON STADI DI
INGRESSO IN CLASSE A-B
Un approccio completamente diverso da quello considerato nel paragrafo precedente è
costituito dall’utilizzazione di uno stadio di ingresso in classe A-B anziché in classe A, il che consente,
almeno in linea di principio, di caricare la capacità di compensazione con tutta la corrente richiesta in
transitorio, anche per grandi segnali. A riposo lo stadio è polarizzato con corrente relativamente bassa;
in presenza di un grande segnale veloce (gradino di tensione di grande ampiezza) la corrente aumenta
proporzionalmente per effetto della presenza di generatori ausiliari.
Nella figura 3.3 è mostrato lo schema semplificato di uno stadio di questo tipo. La struttura base
dello stadio è costituita dai transistori Q1, Q3 e Q2, Q4 con lo specchio a compensazione della corrente
di base Q5, Q6, Q7 ed è identica a quella ben nota dell’amplificatore operazionale 741,
a parte i resistori R1 e R2 e la tecnica di polarizzazione.
In particolare le basi dei trasferitori di corrente pnp Q3 e Q4 sono alimentate tramite i transistori
rispettivamente Q9 e Q8, alimentati, a riposo, dai generatori di corrente I4 e pilotati ciascuno
dall’ingresso della sezione opposta dello stadio. I generatori I3 e i resistori R1 e R2 hanno la funzione di
consentire una polarizzazione adeguata dei vari elementi dello stadio.
Per piccoli segnali la struttura si comporta come un classico stadio in classe A, cioè nella
sostanza come lo stadio di ingresso del 741. La transconduttanza di piccolo segnale peraltro è assai
diversa ed è data da
1
1
2
gm
1
1
1
1
1
R1 R2
R1 R2
R1 R2
1
g mQ1
g mQ 3
g mQ 2
g mQ 4
g mQ1
g mQ 3
g mQ1 g mQ 2 g mQ 3 g mQ 4
avendo posto
Infatti il segnale differenziale di ingresso pilota direttamente, sia la giunzione del transistore
Q3, in serie a R1 e R2, tramite Q1 (resistenza di uscita 1/gmQ1) e Q2-Q9 (follower Darlington), sia, la
giunzione del transistore Q4, in serie a R1 e R2, tramite Q2 (resistenza di uscita 1/gmQ2) e Q1-Q8
(follower Darlington). Nel caso del 741 invece le quattro giunzioni di ingresso sono pilotate in serie.
45
L’AMPLIFICATORE OPERAZIONALE
+V cc
E1
E2
Q9
Q8
R1
I2
I 4 - I2
/hFEp
R1
I 4 - I2
/hFEp
R2
R2
/hFEp
I3
2
/hFEp
I2
Q3
IN
Q2
Q1
IN
I2
Q4
I4
4
3
OUT
Q7
Q6
Q5
-V cc
Figura 3.3
Esempio di stadio di ingresso in classe A-B che consente elevato slew rate
Quindi per piccolo segnale la compensazione in frequenza può essere realizzata secondo
l’usuale procedura utilizzante l’effetto Miller e vale la relazione
g
0 m
Cc
Quando invece viene applicato in ingresso un grande segnale differenziale a fronte assai ripido,
i transistori Q9, rispettivamente Q8, trasferiscono parte della corrente dei generatori I4 alla base dei
transistori Q3, rispettivamente Q4, in dipendenza dal segno del segnale di ingresso. Se ad esempio il
grande segnale di comando è positivo sull’ingresso del ramo Q1, Q3, la corrente aumenta in tale ramo e
diminuisce in quello opposto così che il transistore Q9 perde corrente e quindi una parte di I4 viene
deviata nella base di Q3 aumentando la corrente che questi può fornire in uscita sino al limite ideale
hfe3I4. Dualmente in caso di ingresso di segno opposto. E’ così possibile, in presenza di grande segnale
in ingresso, fornire alla capacità di compensazione corrente assai più elevata di quella I2 che percorre i
dispositivi Q3, rispettivamente Q4, a riposo e quindi ottenere slew rate molto elevato.
Si può, in prima approssimazione, definire una transconduttanza per grandi segnali
1
Gm
R1 R2
applicabile nel caso limite di slewing in cui un ramo è spento e l’altro porta tutta la corrente richiesta,
avendo in queste condizioni trascurato 1/gmQ rispetto a R1+R2.
E’ opportuno imporre la condizione
Gm gm
46
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
onde uguagliare (approssimativamente) i guadagni per piccolo e grande segnale. Tale condizione si
ottiene approssimativamente ponendo
1
R1 R2
1
I3>>I2
e
g mQ 3
g mQ 4
1
R1 R2
La polarizzazione dello stadio è ottenuta attraverso i generatori di corrente I3 e I4 e
dimensionando opportunamente i resistori R1 e R2.
I punti indicati con E1 ed E2 nella figura 3.3, nell’ipotesi di simmetria dello stadio, si trovano allo stesso
potenziale e si può quindi scrivere
I
I
I4 2
I4 2
hFEp
hFEp I Sp
I2
0
I 2 I3 R1 I 2 R2 VT ln VT ln
I 2 I3 R1 I 2 R2 VT ln
I Sp
I Sn
I2
I Sn
Dove i deponenti n e p indicano i transistori npn e pnp rispettivamente
La relazione sopra scritta in combinazione con la condizione di eguaglianza delle
transconduttanze di piccolo e di grande segnale, fissata la corrente di lavoro I2 e le correnti I3 e I4
(quest’ultima, come già detto, molto maggiore di I2 e comunque piuttosto grande anche per tener conto
del basso valore del guadagno dei transistori pnp) permette, in base ai parametri della tecnologia a
disposizione di determinare i valori di R1 e R2.
L’amplificatore a suo tempo realizzato 3.2 utilizzando lo stadio di ingresso sopra descritto ha
consentito di ottenere uno slew rate di circa 30 V/s, approssimativamente 50 volte quello del 741, ma
risulta di non facile implementazione, soprattutto a causa di problemi nell’ottenere una polarizzazione
ragionevolmente precisa e riproducibile (le variabili in gioco sono numerose), e presenta caratteristiche
poco soddisfacenti per quanto riguarda rumore e offset di tensione.
e si ottiene così
gm
Gm
Un altro esempio di stadio di ingresso in classe A-B è rappresentato nella figura 3.4
La struttura circuitale può essere vista come un “doppio stadio differenziale”, costituito da due
strutture differenziali asimmetriche: la coppia Q1 e Q4 (area di emettitore di Q4 pari a m volte quella di
Q1) alimentata dal generatore di corrente Q8, R1 e la coppia Q2 e Q3 (area di emettitore di Q3 pari a m
volte quella di Q2) alimentata dal generatore di corrente Q7, R1 (figura 3.5). L’accoppiamento tra le due
strutture avviene ponendo gli ingressi in comune alle coppie di area diversa, di modo che la corrente
totale disponibile risulti I per ciascun ramo, ma alimentando il carico solamente attraverso i transistori
con area di emettitore minore (m>1).
In tal modo, attorno alla condizione di equilibrio, per piccoli segnali differenziali, la corrente (di
corto circuito) di uscita, per m>>1, è dovuta, in virtù del carico a specchio Q5, Q6, alla somma delle
correnti prodotte dai transistori “interni” Q1 e Q2 che operano sostanzialmente nella configurazione
emettitore comune. Infatti in queste condizioni, in prima approssimazione, gli emettitori di tali
transistori, e cioè i punti indicati con E nella figura 3.4, si spostano assai poco. La transconduttanza per
piccoli segnali gm corrisponde quindi circa al doppio della transconduttanza dei transistori Q1 e Q2 ed
essendo la corrente disponibile in ciascun ramo pari all’incirca a I/m, essa vale approssimativamente
2 I
m VT
3.2
W. E. Hearn “Fast Slewing Monolithic Operational Amplifier”, IEEE J. Solid-State Circuits,SC-6, 20-24, 2/71
47
L’AMPLIFICATORE OPERAZIONALE
+V cc
Q6
Q5
Out
Q4
Q3
In
Q1
m
In
Q2
1
R0
1
E
m
E
Q9
Q8
Q7
I
R1
I
R1
-V cc
Figura 3.4
Stadio di ingresso che consente elevato slew rate
+Vcc
I3
Q5
In
Q2
1
m
R1
Out
I2
Q3
m+1
Q6
In
Q7
I
-Vcc
Figura 3.5
Evidenziazione di uno degli elementi differenziali che compongono lo stadio della figura 3.4
Più esattamente un semplice calcolo mostra che:
m
I
gm 2
2
(m 1) VT
48
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
In condizioni di grande segnale l’uno o l’altro dei transistori Q3 e Q4 tende a interdirsi (a
seconda del segno del segnale applicato in ingresso) e quindi il corrispondente generatore di corrente
Q7 o Q8 tende a inviare tutta la corrente I al transistore Q2 o Q1. In condizioni di slew rate quindi viene
utilizzata tutta la corrente I, mentre per piccoli segnali viene “utilizzata” solamente la corrente I/(m+1).
Lo slew rate è dato da
I
SR
CC
3.3
essendo Cc la capacità di compensazione .
La capacità di compensazione è determinata in relazione al prodotto guadagno-banda
dell’amplificatore dalla transconduttanza per piccoli segnali del primo stadio, secondo la ben nota
relazione
gm
0
Cc
e quindi
m 1
I
SR
0 VT
0
gm
2m
con un miglioramento, rispetto allo stadio differenziale semplice, pari a
2
m 1
2
4m
(si tenga presente che il confronto va effettuato a pari corrente disponibile , e cioè I, e quindi la
corrente a riposo nello stadio differenziale convenzionale è pari a I/2)
Ad esempio, nel caso di m=10, si ha un aumento dello slew rate, a pari 0, di un fattore circa pari a 3.
Ovviamente il risultato sopra riportato è valido nell’ipotesi che la struttura proposta non
modifichi apprezzabilmente 0, il che è ammissibile soltanto in prima approssimazione.
La transconduttanza del primo stadio può essere ridotta ulteriormente a pari corrente di lavoro
introducendo degenerazione di emettitore per i transistori Q1 e Q2. Ciò peraltro con i ben noti
conseguenti problemi: aumento del rumore serie riferito all’ingresso e peggioramento dell’offset di
tensione (a meno che non si utilizzino tecniche di trimming).
A seguito di quanto sopra discusso si può affermare che un apprezzabile miglioramento dello
slew rate, sia in relazione al prodotto guadagno banda, sia in assoluto, è difficile da ottenere, senza
influenzare negativamente in misura poco accettabile altri parametri (in particolare rumore e offset di
tensione), nel caso della tecnologia bipolare standard. Tecnologie bipolari più avanzate consentono 0
anche assai più elevati e SR corrispondentemente più alti; la tecnologia BiFet, soprattutto nelle versioni
più evolute, consente 0 di circa un ordine di grandezza più elevati che non la tecnologia standard e SR
più elevati anche in assoluto essendo i dispositivi di ingresso intrinsecamente caratterizzati da più
elevato I/gm. Anche in questo ultimo caso peraltro peggiorano le prestazioni di rumore e offset di
tensione.
Con l’occasione conviene richiamare ancora una volta l’attenzione sul fatto che dal punto di
vista dello slew rate conta il rapporto tra la corrente utilizzata (per caricare la capacità di
compensazione e quelle ad essa associate) e la transconduttanza effettiva, cioè quella dello stadio (che
in risposta al segnale di ingresso produce la corrente di segnale in uscita): non conta il rapporto tra la
3.3
Trascuriamo, per semplicità, la capacità dei generatori di polarizzazione
49
L’AMPLIFICATORE OPERAZIONALE
corrente di polarizzazione e la transconduttanza dei dispositivi di ingresso. Si consideri a questo
proposito la struttura rappresentata nella figura 3.6.
Il collettore dei transistori pnp di ingresso Q1 e Q2 è diviso in due parti 3.4 di cui una viene
utilizzata per trasferire il segnale in uscita attraverso il carico a specchio Q3, Q4, mentre l’altra, con
area di collezione n volte maggiore, manda la corrente direttamente all’alimentazione; quindi della
corrente totale prodotta attraverso la giunzione base emettitore dei transistori in risposta al segnale di
ingresso solo la frazione 1/(n+1) viene utilizzata, mentre la frazione n/(n+1) viene gettata.
+V cc
I
R1
Q5
Q9
Q1
In
n
Q2
1
1
Q3
Q4
In
R0
n
Out
-V cc
Figura 3.6
Stadio con dispositivi di ingresso pnp multicollettore
La transconduttanza effettiva dello stadio è quindi data da
1 I
g meff
n 1 VT
ed è perciò (n+1) volte inferiore alla transconduttanza che si otterrebbe se tutta la corrente di
polarizzazione venisse utilizzata.
La transconduttanza è dunque stata ridotta, ma in ugual misura è ridotta la corrente utilizzabile
in uscita per caricare la capacità di compensazione a valle dello stadio e quindi, a parità di prodotto
guadagno 0, lo slew rate risulta essere lo stesso che avremmo avuto se non avessimo frazionato il
collettore
g
0 m
Cc
Lo scopo della soluzione adottata nella figura 3.6 non è dunque quello di modificare
(migliorare) lo slew rate, ma quello di ridurre il valore, e quindi le dimensioni fisiche, della capacità di
compensazione in base alla solita relazione
3.4
Solo i transistori pnp laterali della tecnologia bipolare di base possono essere utilizzati per produrre strutture
multicollettore. In questo caso in fatti il collettore è una struttura ad “anello” che circonda l’emettitore che può quindi essere
facilmente suddivisa i sezioni separate che raccolgono ciascuna una frazione della corrente totale proporzionale alla
porzione di emettitore a cui si affaccia.
50
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
gm
Cc
La riduzione della transconduttanza effettiva attraverso l’eliminazione di una frazione della
corrente prodotta non comporta la riduzione della corrente I che attraversa le giunzioni base emettitore
dei transistori di ingresso e quindi tali transistori funzionano in condizioni di lavoro adeguate (livello di
iniezione di emettitore sufficientemente alto).
0
51
L’AMPLIFICATORE OPERAZIONALE
Cap. 4
REIEZIONE DEL MODO COMUNE
(CMR)
4.1 CONSIDERAZIONI GENERALI
Ricordiamo che la reiezione del modo comune è definita come il rapporto tra il guadagno di
modo differenziale e quello di modo comune
A
CMR d
Acm
E’ quindi importante sia realizzare guadagno (di modo) differenziale elevato, sia minimizzare il
guadagno di modo comune.
La tecnologia utilizzata interviene solitamente in misura determinante nel consentire tale
risultato: la tecnologia BJT consente, tranne casi particolari, di ottenere guadagno differenziale più
elevato e guadagno di modo comune più basso di quelli ottenibili con altre tecnologie, in particolare
CMOS. Peraltro l’utilizzo di opportune soluzioni nell’architettura generale del sistema (segnatamente
l’introduzione di reiezione locale sul modo comune), di adeguate soluzioni circuitali, di buon
dimensionamento dei dispositivi (in particolare nel caso dei MOS), di accurato layout, di soddisfacente
accoppiamento termico, tecniche di trimming, ecc. possono migliorare, a volte considerevolmente, le
prestazioni ottenibili.
La risposta al modo comune è determinata sostanzialmente da errori di simmetria dello stadio.
Per comodità consideriamo nel seguito lo stadio differenziale “classico” nella sua forma più semplice,
cioè costituito da una coppia di transistori di ingresso e un carico passivo o attivo (in genere a
specchio); strutture della stessa natura, ma più complesse, sono solitamente facilmente riconducibili
alla presente trattazione. Architetture differenziali, ma intrinsecamente (circuitalmente) asimmetriche,
come quelle impiegate negli amplificatori Current Feedback Mode (CFM), verranno trattate nel
seguito.
Gli errori vanno distinti, come nel caso dell’offset di tensione, in errori sistematici ed errori di
natura statistica
I primi sono essenzialmente connessi con l’architettura circuitale utilizzata (asimmetria
intrinseca) e con il mismatch sistematico di parametri degli elementi attivi (ad esempio il valore
“tipico” della tensione di Early di BJT npn e pnp o MOS a canale n o p, il differente numero di
Gummel di transistori npn e pnp, nell’ambito della stessa tecnologia, ecc.), il livello in continua del
modo comune in ingresso.
Gli errori di natura statistica derivano da “mismatch”, cioè non perfetto accoppiamento, dei
parametri caratteristici rilevanti dei dispositivi utilizzati, cioè dalla intrinseca varianza associata ai
valori tipici di tali parametri: principalmente resistenza dei resistori, corrente di saturazione inversa dei
BJT, tensione di pinch-off Vp e IDSS dei JFET, tensione di soglia Vt, fattore di guadagno K e fattore di
effetto body nei MOS, posizione nel layout.
Gli elementi di cui sopra interessano contemporaneamente grandezze caratteristiche
dell’amplificatore quali offset di tensione e guadagno di modo comune (quindi CMR) e dunque deve
esistere una relazione tra di esse. VOS e CMR sono quindi strettamente legati tra loro anche se la
relazione è resa piuttosto complessa dalla contemporanea presenza di effetti sistematici e statistici,
nonché dal fatto che l’offset di tensione è definito come grandezza “in continua”, mentre la reiezione
del modo comune ha interesse anche in funzione della frequenza.
52
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
E’ infine opportuno ricordare che, solitamente, la reiezione del modo comune può essere
considerata un parametro associato di fatto al solo stadio di ingresso: come per altri parametri (rumore,
offset di tensione) gli stadi successivi intervengono solamente in certe condizioni, ad esempio sistemi
low voltage e/o micropower, tecnologie particolari (NMOS), o in un certo campo di frequenze.
4.2 SEMPLICE STADIO BJT CON CARICO PASSIVO
La semplice struttura considerata (figura 4.1) gode intrinsecamente di elevata simmetria e
minimizza quindi gli errori sistematici che risultano associati unicamente a gradienti di processo. Tali
errori sono solitamente minimizzabili utilizzando adeguate tecniche di dimensionamento e layout
(anche termico): è quindi dominante la CMR di origine statistica.
RC1
R C2
VOUT
C1
IN
Q1
IC2
IN
Q2
2I =
C1 + IC2
Figura 4.1
CMR: stadio differenziale con transistori bipolari e carico passivo
Consideriamo lo stadio in assenza di carico esterno, cioè a vuoto.
Il guadagno differenziale è ovviamente dato da
dove RC è il valor medio della resistenza di carico
Ad g mi RC
Il guadagno di modo comune deriva principalmente dal mismatch delle IS e di RC (trascuriamo
l’effetto Early nell’ipotesi, usualmente abbastanza bene verificata, che le resistenze di Early siano
grandi rispetto alle resistenze di carico)4.1. Possiamo poi al solito considerare indipendenti gli effetti
della dispersione dei vari parametri.
Un segnale vcm di modo comune in ingresso produce nella “coda” una corrente
vcm
dove Rt è la resistenza equivalente della “coda”
(Rt>>1/gmi)
icm
Rt
4.1
Vengono qui considerati gli scostamenti dai valori nominali; tali scostamenti andrebbero poi tradotti in varianze.
53
L’AMPLIFICATORE OPERAZIONALE
vcm
2 Rt
Nell’ipotesi, valida in prima approssimazione, che si possa trascurare l’interazione tra IS e
RC, consideriamo separatamente la risposta al modo comune prodotta dalla dispersione dei due
parametri.
Per effetto della sola IS le correnti nei due rami dello stadio risultano diverse e la differenza
corrisponde a una corrente icm/2 circolante nella maglia Q1-Q2-RC1-RC2. Vale ovviamente (in prima
approssimazione e cioè trascurando l’interazione tra RC e IS) la proporzione
icm I S
icm 1 I S
icm
icm
IS
2
2
IS
In uscita tale corrente produce una tensione
icm
I
R I S
2RC icm S RC C
vcm
2
IS
2Rt I S
Per effetto della sola RC, in prima approssimazione, nei due rami circola la stessa corrente
icm/2 e si produce in uscita una tensione
icm
R RC
RC C
vcm
2
2 Rt RC
Il guadagno di modo comune, dovuto ai due contributi considerati indipendenti, è quindi
R I
R
Acm C S C
2 Rt I S
RC
I S
Il termine
rappresenta la deviazione relativa della partizione della corrente di risposta al modo
IS
RC
comune tra i due rami, mentre il termine
rappresenta la deviazione relativa nella conversione
RC
corrente tensione dovuta al carico.
La reiezione del modo comune risulta dunque
A
1
CMR d 2 g mi Rt
Acm
I S RC
RC
IS
Ricordando l’espressione dell’offset di tensione per lo stadio in esame
I
R
VOS VT S C
RC
IS
sussiste la relazione
CMR VOS 2VT gmi Rt 2IRt
e nel caso, assai frequente, che il generatore di corrente sia costituito da un semplice transistore
V
Rt At
dove VAt è la tensione di Early di tale transistore
2I
CMR VOS VAt
Consideriamo un esempio quantitativo (transistori npn)
nel caso di dispositivi attivi ottenuti per diffusione e di dimensioni relativamente
piccole (qualche decina di 2 di area di emettitore) e resistori diffusi
I S 4 6%
VAt=80 V
R 1%
e in ciascun ramo una corrente media
54
icm
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
VOS 1, 07 1,58mV
si ottiene
CMRR 97 94dB
nel caso di dispositivi attivi low voltage ottenuti per impiantazione ionica e di
dimensioni piccole (qualche 2 di area di emettitore) e resistori a film
I S 0, 4 0, 6%
VAt=30 V
R 0,5%
VOS 0,17 0, 2mV
si ottiene
CMRR 105 104dB
Come si vede anche con carico passivo si possono ottenere CMRR ragguardevoli pur utilizzando come
generatore di corrente la configurazione più semplice, cioè un transistore nella configurazione
emettitore comune.
4.3 SEMPLICE STADIO BJT CON CARICO A SPECCHIO
L’utilizzo di un carico a specchio (figura 4.2) comporta simmetria intrinseca non completa e
quindi limitata rispetto al caso di carico passivo con conseguenti contributi sistematici all’offset di
tensione (come già visto) e alla reiezione del modo comune.
Q4
Q3
IN
Q1
C3
C4
C1
C2
Q2
OUT
IN
2I
Figura 4.2
CMR: stadio differenziale BJT con carico a specchio semplice
Il carico infatti risulta intrinsecamente asimmetrico: sul ramo di uscita è rappresentato dal
generatore di corrente Q4 mentre sull’altro ramo è costituito dal pozzo dello specchio. Le resistenze
equivalenti si trovano quindi, con buona approssimazione, nel rapporto VA4/VT. Si noti che tale
asimmetria è fondamentalmente desiderabile: al limite un buon carico a specchio dovrebbe avere
resistenza di pozzo nulla (assorbimento di tutta la corrente fornita da Q1) e resistenza di uscita infinita
(massimo guadagno a vuoto dello stadio).
Intervengono le tensioni di Early dei transistori Q2 (npn) e Q4 (pnp) che, pur ipotizzando
transistori Q3 e Q4 identici, portano, anche a vuoto, il nodo di uscita a un livello di tensione diverso da
quello del nodo tra Q1 e Q3 e determinano quindi correnti diverse nei due rami: si tratta di una
asimmetria di polarizzazione dello stadio, cioè in continua. Più in generale la polarizzazione in tensione
del nodo di uscita è determinata anche, e spesso prevalentemente, dal carico applicato allo stadio (in un
tradizionale amplificatore operazionale, ad esempio, il secondo stadio) e quindi il dislivello tra le
55
L’AMPLIFICATORE OPERAZIONALE
polarizzazioni dei nodi di collettore dei transistori Q1 e Q2 che ne risulta determina le correnti nei due
rami e di conseguenza un contributo sistematico all’offset di tensione e al CMR in continua.
Inoltre, nel caso di componenti attivi bipolari, sono presenti (si veda la trattazione relativa
all’offset di tensione):
un errore sistematico connesso con il fattore di specchio non perfettamente unitario, per effetto della
presenza delle correnti di base (guadagno di corrente finito dei BJT).
un errore sistematico connesso con il fatto che tra il pozzo dello specchio e il generatore di corrente
Q1 si ha partizione di corrente per cui la frazione specchiata della corrente prodotta dal segnale di
ingresso è data da
g mQ 3
V
1 T
gC1 conduttanza di uscita di Q1
g mQ 3 g C1
VA1
Come già notato, quest’ultimo contributo è solitamente di peso trascurabile negli stadi BJT, ma
può avere effetto in stadi CMOS caratterizzati da transconduttanza significativamente inferiore e bassa
tensione di Early.
La reiezione del modo comune è quindi determinata sia dalla dispersione statistica dei parametri
rilevanti, sia dagli effetti sistematici e, trascurando in prima approssimazione l’interazione tra tali fonti
di errore (risposta al modo comune), si possono determinare separatamente una reiezione di origine
statistica CMRr e una reiezione di origine sistematica CMRs.
Procedendo in sostanza come nel caso precedente la reiezione di origine statistica, considerando
solamente i parametri di maggiore rilevanza e trascurando l’effetto Early, si può esprimere come
2 g mQ Rt
2 IRt
CMR
I Si I Sl
I
I
VT Si Sl
I Si
I Sl
I Sl
I Si
Infatti il guadagno di modo comune prodotto dalla dispersione delle correnti di saturazione
inversa IS degli elementi di ingresso Q1 e Q2 e del carico Q3 e Q4 è dato da
I
R I
dove RL è la resistenza equivalente di carico
Acm L Si Sl
2 Rt I Si
I Sl
ISi è la corrente di saturazione inversa dei dispositivi di ingresso
ISl è la corrente di saturazione inversa dei dispositivi di carico
mentre il guadagno differenziale è
Ad g mQ RL
Ricordando l’espressione dell’offset di tensione (a parte i segni, non rilevanti in quanto si tratta
di variazioni random) si può ancora una volta scrivere
CMR VOS 2VT g mQ Rt 2 IRt
ancora, nel caso che il generatore di corrente sia costituito da un semplice transistore
CMR VOS VAt
La reiezione di origine sistematica è data da
2 g mQ Rt
CMR
1 FS
2 g mQ Rt
VT
2
VAi h feL
dove
56
g mQ
g mQ gCi
1
VT
VAi
è il fattore di partizione della corrente nel nodo di pozzo
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
2
è il fattore di specchio
1
2
h
feL
1
h feL
Ancora una volta si può scrivere
CMR VOS 2VT g mQ Rt 2 IRt
e nel caso che il generatore di corrente sia costituito da un semplice transistore
CMR VOS VAt
Come già osservato il contributo della partizione è di peso trascurabile nel caso di dispositivi
bipolari e specchio semplice di corrente; nel caso di specchio con errore ridotto (Wilson o a correzione
delle correnti di base) può assumere, in termini relativi, un ruolo non trascurabile. In ogni caso tale
termine risulta assai maggiore nel caso di dispositivi MOS.
FS
1
Le due reiezioni considerate si possono combinare per ottenere la reiezione complessiva dovuta
sia ai contributi statistici che a quelli sistematici. Dalle relazioni precedenti considerando l’offset totale,
in prima approssimazione, come la somma dei due contributi considerati (worst case) si ottiene
1
1
1
CMR CMRr CMRs
congruente col fatto ovvio che prevale la reiezione più bassa. La distinzione tra contributi di
origine statistica e contributi di origine sistematica è importante per il progettista onde decidere quali
interventi effettuare al fine di migliorare, se necessario, le prestazioni del sistema.
Nel caso della semplice struttura qui considerata con transistori pnp laterali i due contributi alla
reiezione risultano confrontabili. Utilizzando uno specchio a compensazione delle correnti di base o
uno specchio Wilson si riduce considerevolmente il contributo sistematico e viene a prevalere il
contributo statistico.
4.4 STADIO BJT CON CARICO A SPECCHIO SIMMETRIZZATO
L’utilizzo di un carico a specchio (figura 4.2) comporta simmetria intrinseca non completa ed è
quindi giustificato in determinati casi il ricorso a strutture utilizzanti un carico attivo intrinsecamente
simmetrico.
La soluzione più semplice consiste nell’utilizzare come carico due transistori separati come
nella figura 4.3. Tale soluzione peraltro presenta problemi di polarizzazione assai maggiori di quelli
della struttura a specchio e anche maggiori problemi di accoppiamento tra i dispositivi. Inoltre risulta
topologicamente double ended e comporta pertanto l’utilizzo di uno stadio successivo con ingresso
differenziale.
Una possibile soluzione, vantaggiosa dal punto di vista della simmetria, è quella presentata
nella figura 4.4 4.2. Ciascun ramo della struttura di ingresso è caricato dal pozzo di uno specchio. Tali
specchi, con l’aggiunta di un ulteriore specchio Q7-Q8, riportano in uscita la corrente di risposta al
segnale di ingresso, eventualmente moltiplicata per un opportuno fattore di specchio.
L’architettura qui considerata è utilizzata più frequentemente in tecnologia CMOS dove presenta ulteriori vantaggi in
termini di guadagno differenziale ottenibile e prodotto guadagno-banda: ciò in virtù delle maggiori possibilità offerte al
progettista dalla tecnologia riguardo il dimensionamento dei dispositivi.
4.2
57
L’AMPLIFICATORE OPERAZIONALE
Q4
Q3
OUT
C
C
IN
Q1
Q2
IN
2I
Figura 4.3
CMR: stadio differenziale BJT con carichi attivi separati
Q5
Q3
Q4
Q6
OUT
C
IN
Q1
C
Q2
IN
2I
Q7
Q8
Figura 4.4
CMR: stadio differenziale BJT con carico a specchio simmetrizzato
58
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
La transconduttanza è data da
g m g mQi FS
dove gmQi è la transconduttanza dei transistori di ingresso e FS il fattore di
specchio degli specchi Q3-Q5 e Q4-Q6; il fattore di specchio di Q7-Q8 è,
ovviamente, unitario.
Il guadagno differenziale di tensione a vuoto (guadagno disponibile) è dato da
VAeq
dove VAeq è la tensione di Early equivalente dei transistori Q6 e Q8.
Ad
VT
Tale guadagno, nel caso di dispositivi bipolari, non dipende quindi da FS in quanto la
transconduttanza risulta moltiplicata per FS mentre la resistenza equivalente di carico (resistenze di
Early dei transistori Q6 e Q8) ne risulta divisa. Il fattore di specchio può quindi essere utilizzato per
aumentare la transconduttanza dello stadio pur polarizzando i transistori di ingresso a bassa corrente
per garantire elevata resistenza di ingresso.
4.5 STADIO CMOS CON CARICO RESISTIVO
Lo stadio è mostrato nella figura 4.5.
R D1
R D2
VOUT
D1
IN
M1
I D2
M2
2I =
IN
D1+ I D2
Figura 4.5
CMR: stadio differenziale C MOS con carico resistivo
La trattazione segue ovviamente le linee utilizzate nel caso del corrispondente stadio BJT.
Possiamo al solito considerare indipendenti gli effetti della dispersione dei vari parametri: 4.3
4.3
Trascuriamo l’effetto body (e quindi la dispersione del relativo parametro) in quanto le strutture qui considerate non ne
risentono qualora venga utilizzata la tecnologia opportuna (p-well nel caso delle figure 4.5 e 4.6). Ovviamente nel caso
di altre architetture circuitali sarebbe necessario considerarlo, ma solitamente il suo effetto è modesto per quanto
riguarda le grandezze qui discusse.
I parametri Vt e K sono in realtà un poco interdipendenti in quanto in ambedue intervengono il drogaggio del substrato
e lo spessore dell’ossido.
59
L’AMPLIFICATORE OPERAZIONALE
Vt
RD
K
1 'W 1
W
Cox
K k
K
RD
Vt
2 L 2
L
Vt deriva dalla dispersione dello spessore dell’ossido e da disuniformità statistiche nel
drogaggio del substrato; oggigiorno queste ultime sono solitamente dominanti (negli attuali sistemi
VLSI l’uniformità dello spessore dell’ossido risulta ben riproducibile) e, per un effetto di media, la
dispersione relativa di Vt risulta in prima approssimazione inversamente proporzionale all’area del
dispositivo:
V
*
4.3
t
WL
K deriva dalla dispersione dello spessore dell’ossido, della mobilità, dal rapporto di forma;
oggigiorno risulta solitamente dominante W/L e cioè il processo fotolitografico.
Il guadagno differenziale è dato da
Ad g mi RD
Il contributo di RD al guadagno di modo comune è dato semplicemente da
1
RD
2 Rt
Vt genera una differenza icm tra le correnti che fluiscono nei due rami in risposta al segnale di
modo comune;
icm gmi Vt
Va quindi considerata una corrente icm /2 che fluisce nella maglia M1-M2-RD1-RD2 e produce
quindi un contributo al guadagno di modo comune
g mi Vt RD RD 2Vt
vcm
2 Rt VGS Vt
Infine K genera anch’esso una differenza tra le correnti che fluiscono nei due rami in risposta
al segnale di modo comune, data da
K
icm
K
e quindi un contributo al guadagno di modo comune
1 K
RD
2 Rt K
La reiezione del modo comune risultante è data da
2 g mi Rt
CMR
2Vt
RD
K
RD VGS Vt
K
Ricordando l’espressione dell’offset di tensione ottenuta più addietro (tale espressione era stata
ottenuta considerando la dipendenza di K dal solo rapporto di forma W/L) si vede che anche in questo
caso risulta un legame tra la reiezione del modo comune e l’offset di tensione
V Vt
CMR VOS GS
2 g mi Rt 2 IRt
2
* è un parametro caratteristico della tecnologia (dell’ordine dei centesimi di V/) ; per effetto del più elevato numero di
passi di processo (impiantazione ionica) necessari nel caso di transistori a canale p per determinarne la soglia, *
risulta tipicamente maggiore di circa il 50% per i transistori a canale p rispetto a quelli a canale n.
Anche la dispersione di K risulta maggiore (solitamente di circa il 50%) per i dispositivi a canale p.
4.3
60
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
4.6 STADIO CMOS CON CARICO ATTIVO A SPECCHIO
Lo stadio è mostrato nella figura 4.6.
Possiamo sostanzialmente procedere come nell’analogo caso bipolare e, per quanto riguarda i
contributi statistici, come nel caso precedente. Sono ovviamente definibili una reiezione di origine
statistica e una di origine sistematica, ma quest’ultima è associata soltanto alla partizione di corrente
nel nodo di specchio e non al fattore di specchio. Nella maggior parte dei casi prevale il contributo
statistico e in ogni caso si può in prima approssimazione scrivere
1
1
1
CMR CMRr CMRs
La reiezione del modo comune di origine statistica risulta data da
2 g mi Rt
CMRr
W
W
2Vtn
L p
L n Vtp
W
VGS Vt p
VGS Vt n W L
L p
n
2
M3
M4
VOUT
ID
IN
M1
ID
M2
IN
2I D
Figura 4.6
Stadio differenziale MOS con carico attivo a specchio
e vale la solita relazione
CMR VOS 2 IRt
Il guadagno di modo comune (transconduttanza di modo comune) dovuto agli effetti sistematici
(partizione della corrente nel nodo di pozzo dello specchio) è
1
1
(ro1 resistenza di Early dei transistori di ingresso)
2 Rt 1 g m3ro1
61
L’AMPLIFICATORE OPERAZIONALE
La reiezione del modo comune di origine sistematica risulta quindi data da
CMRs 2 gmi Rt 1 gm3ro1 2gmi Rt gm3ro1
e vale ancora la solita relazione
CMR VOS 2 IRt
4.7 CMR IN FUNZIONE DELLA FREQUENZA
Nelle semplici strutture considerate, per quanto riguarda la risposta al modo comune in funzione
della frequenza gioca un ruolo fondamentale la capacità Ct associata al generatore di corrente della
coda. E’ infatti evidente che esso determina uno zero alla frequenza
1
f Zt
2 Rt Ct
e quindi, qualora sia presente un polo dominante (come in un amplificatore completo e
compensato) l’andamento della reiezione del modo comune può essere del tipo rappresentato nella
figura 4.7: la reiezione scende a 20dB/decade a partire da fZt. E’ quindi importante curare il generatore
di coda non solamente per quanto riguarda la resistenza equivalente, ma anche per quel che riguarda la
capacità ad esso associata. Ad esempio un semplice generatore di corrente a singolo transistore in
tecnologia bipolare a diffusione, con isolamento a giunzione può presentare capacità di collettore
elevate (pF).
A
10
6
CMRR
10
5
Ad
10
10
10
4
3
2
10
1
GBW
10
10
10
-1
Acm
-2
f
-3
10
100
1k
10 k
100 k
1M
10 M
100 M
Figura 4.7
Andamento con la frequenza di Ad, Acm, CMR
62
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
4.8 RETROAZIONE SUL MODO COMUNE
Una tecnica, spesso adottata quando un insufficiente guadagno differenziale e/o un eccessivo
guadagno di modo comune condurrebbero a un CMR insoddisfacente, è quella di introdurre una
retroazione che agisce solo sul modo comune. Consideriamo a titolo di esempio la struttura riportata
nella figura 4.8 in cui sono mostrati (con qualche semplificazione inessenziale ai fini della presente
discussione) il primo e il secondo stadio di un possibile amplificatore operazionale in tecnologia BiFet.
+VCC
Q8
Q10
Q9
F3
F4
IN+
F1
F2
Q3
Q4
F5
Q6
Q5
R1
Q1
allo stadio
di uscita
Cc
IN-
R1
Q2
Q7
R2
Q11
R2
-VCC
Figura 4.8
Primo e secondo stadio di un OPA in tecnologia BiFet con retroazione sul modo comune
Il primo stadio presenta guadagno differenziale inferiore a quello di una struttura bipolare per
effetto della minor transconduttanza dei JFET e della loro inferiore tensione di Early; il guadagno di
modo comune risulta invece alquanto più elevato malgrado sia stata utilizzata una “coda” degenerata.
Ne risulta una CMR non del tutto soddisfacente. Va poi anche notato che il carico del primo stadio è
costituito da due elementi attivi separati il che determina forte dispersione del livello di tensione di
polarizzazione in uscita. Il secondo stadio è necessariamente uno stadio differenziale, considerato il
prelievo del segnale dal primo stadio ed è quindi, tra l’altro, un buon lettore del modo comune: infatti il
segnale presente sulla sua “coda” Q7 uguaglia con ottima approssimazione la componente di modo
comune del segnale presente al suo ingresso (cioè proveniente dal primo stadio). Tale segnale viene
quindi applicato alle basi dei transistori di carico del primo stadio Q1 e Q2 chiudendo così un anello di
retroazione che interviene sul modo comune riducendone il guadagno nella misura del guadagno di
anello. E’ immediato verificare che la retroazione è del segno corretto e quindi correttiva della risposta
al modo comune e che il livello di polarizzazione in tensione dei collettori di Q1 e Q2 è determinato
63
L’AMPLIFICATORE OPERAZIONALE
dalle cadute ai capi delle giunzioni di Q3 (Q4), Q5(Q6), Q11 (pozzo dello specchio di polarizzazione che,
in prima approssimazione, impone ai capi di Q7 la propria VBE); le cadute ai capi dei resistori R1 si
possono trascurare.
Soluzioni analoghe a quella qui presentata sono assai diffuse nel progetto di strutture
analogiche differenziali per cui sia richiesta una CMR elevata.
64
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
Cap. 5
RISPOSTA IN FREQUENZA E COMPENSAZIONE
5.1 GENERALITA’
Richiamiamo qui alcune nozioni fondamentali relative al comportamento in frequenza e alla
compensazione degli amplificatori.
Ci riferiamo alle classiche strutture utilizzate in particolare per realizzare amplificatori
operazionali (OPA) o amplificatori a transconduttanza (OTA). Categorie diverse – amplificatori per
strumentazione (instrumentation amplifiers), amplificatori operazionali “voltage mode” a larghissima
banda, amplificatori current feedback mode, amplificatori video, amplificatori completamente
differenziali, ecc. – verranno esaminate più in dettaglio nel seguito. Ci riferiamo poi in particolare alle
strutture realizzate in tecnologia bipolare, pur considerando brevemente anche i problemi della
tecnologia CMOS (in particolare per quanto riguarda gli OTA “on chip”, cioè implementati nell’ambito
di un sistema digitale VLSI e che quindi, salvo casi particolari, non comunicano con sistemi esterni ed
hanno carichi di ingresso e di uscita definiti e noti) che peraltro verranno anch’essi affrontati in
maggiore dettaglio più avanti.
Consideriamo, per iniziare, l’architettura generale più consueta di un OPA. Essa può essere
rappresentata come costituita da più stadi in cascata (ovviamente strettamente interagenti tra loro) ed è
solitamente analizzata e progettata da un punto di vista “voltage mode”, cioè considerando il
trasferimento del segnale attraverso la struttura in termini di tensione 5.1. Quindi i blocchi circuitali
sono pensati in termini di amplificazione di tensione e sono identificabili alcuni nodi ad elevata
resistenza cui sono attribuibili il guadagno in tensione (“in continua”, cioè a frequenze sufficientemente
basse rispetto a quella del primo polo) e i poli principali. Si tratta quindi di amplificatori con resistenza
di ingresso possibilmente elevata (rispetto a quella delle usuali sorgenti di segnale) e resistenza di
uscita piccola (rispetto a quella dei carichi più frequentemente utilizzati).5.2
Molto spesso l’amplificatore è costituito da tre blocchi: stadio di ingresso, secondo stadio o
stadio intermedio e stadio di uscita (o “di potenza”). In alcuni casi, assai meno frequenti, viene
aggiunto, per ragioni di guadagno, un ulteriore stadio intermedio (come, ad esempio, nel caso del
vecchio amplificatore 725). Una categoria importante, soprattutto in tecnologia CMOS (in particolare
per quanto riguarda le strutture analogiche “on chip”), è costituita dagli amplificatori a
transconduttanza destinati a pilotare carichi essenzialmente capacitivi. In questo caso le architetture più
semplici possono essere costituite da un singolo stadio e l’architettura più frequentemente utilizzata da
due stadi; in questo caso l’uscita è ad elevata resistenza, cioè di corrente, in quanto si tratta di caricare
una capacità.5.3
L’approccio “voltage mode” (terminologia peraltro alquanto impropria, ma di fatto entrata nell’uso) conduce, tra l’altro, a
considerare che il guadagno complessivo in tensione sia massimizzabile massimizzando le resistenze equivalenti dei
nodi tra i diversi stadi, in particolare tra il primo e il secondo, il che in linea di principio non è accettabile anche se in
pratica risulta un percorso utilizzabile (si veda la discussione di questo punto presentata nel seguito).
5.2
Ricordiamo ancora che gli amplificatori operazionali sono dotati di guadagno elevato utilizzato nelle applicazioni
fondamentalmente come guadagno di anello del sistema retroazionato: Pertanto, a seconda della tipologia della
retroazione si possonono ottenere, a partire dell’amplificatore “di tensione” ad anello aperto, soddisfacenti
amplificatori di tensione (retroazione tensione-tensione), di corrente (retroazione corrente-corrente), a transimpedenza
(retroazione tensione-corrente), a transammettenza (retroazione corrente-tensione).
5.3
I normali amplificatori operazionali di tensione non sono in grado di pilotare carichi capacitivi se non di entità molto
modesta (pF); attualmente esistono amplificatori progettati per pilotare carichi non resistivi, in particolare con
componente capacitiva del carico non trascurabile.
5.1
65
L’AMPLIFICATORE OPERAZIONALE
Nel caso della tecnologia bipolare standard, cioè della tecnologia di più basso livello, i
principali contributi alla limitazione dellz risposta in frequenza sono:
l’inevitabile presenza di transistori pnp che sono caratterizzati da una frequenza di taglio
dell’ordine dei MHz (tempi di transito attraverso la base di decine di ns) e quindi molto
minore di quella dei transistori npn (parecchie centinaia di MHz)
la presenza di un elevato numero di capacità “parassite” associate ai depletion layers
delle giunzioni, dipendenti dalle tensioni di polarizzazione, che introducono singolarità
(non solo reali, ma anche complesse coniugate) ad alta frequenza, distanti dai poli
principali, ma numerose; giocano da questo punto di vista un ruolo fondamentale le
giunzioni di isolamento
le capacità parassite associate ai resistori
I prodotti guadagno-banda così ottenibili risultano limitati, salvo poche eccezioni, al campo dei
MHz.
Aumentando le correnti di polarizzazione, a parità di tensioni, si riducono i livelli di resistenza
nei vari nodi: il caso limite è costituito da un progetto “current mode” in cui il segnale viene trasferito
come corrente e quindi minimizzando le costanti di tempo associate ai vari nodi.
Tecnologie più avanzate utilizzano dispositivi di piccole dimensioni (riduzione delle capacità
parassite) caratterizzati da fT elevate (GHz), isolamento dielettrico (forte riduzione delle capacità
parassite associate all’isolamento), resistori a film sottile (forte riduzione delle capacità parassite
associate), pnp verticali (tecnologie “true complementary”). Si ottengono così prodotti guadagno-banda
che possono superare il GHz.
5.2 COMPENSAZIONE “ALLA MILLER”
Esaminiamo dapprima il caso degli amplificatori “stand alone”, cioè destinati a essere utilizzati
come tali, non inglobati in strutture più complesse e non dedicati o “custom”; in questo caso non
risultano definiti i carichi di ingresso e di uscita (amplificatori “general purpose”). In particolare
esaminiamo gli OPA voltage mode, di gran lunga i più diffusi. La rappresentazione a blocchi è quindi,
tranne casi particolari, quella riportata nella figura 5.1 dove sono evidenziati i due “nodi di guadagno”
NG1 e NG2.
In una prima approssimazione, di fatto solitamente abbastanza bene utilizzabile, i poli principali
si possono considerare reali e definiti dalle costanti di tempo determinate dalle resistenze equivalenti e
dalle capacità equivalenti caratterizzanti i nodi stessi in quanto a tali nodi è associata una resistenza
assai più elevata rispetto a quella di tutti gli altri nodi del sistema. Ovviamente la situazione reale è
assai più complessa: i due nodi considerati non si possono considerare separatamente come se non
interagissero e altri nodi, interni ai singoli blocchi e anch’essi interagenti, introducono singolarità: ad
esempio in un primo stadio differenziale con carico a specchio il nodo corrispondente al pozzo dello
specchio introduce una coppia polo-zero distanziati di una ottava. Tali singolarità, in genere numerose,
si trovano peraltro a frequenze assai più alte di quelle caratterizzanti i poli principali generati dai nodi
di guadagno, ma agli effetti della compensazione in frequenza danno un contributo non del tutto
trascurabile allo sfasamento in corrispondenza del prodotto guadagno banda.
66
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
IN
I
STADIO
(INGRESSO)
NG1
C1
II
STADIO
III
STADIO
(USCITA)
NG2
OUT
C2
Figura 5.1
Schema a blocchi di OPA voltage mode a tre stadi
Le due singolarità principali si trovano in generale a frequenze poco discoste: ad esempio in
tecnologia bipolare standard il primo polo (afferente solitamente al nodo NG1) a poche decine di kHz,
il secondo a poche centinaia di kHz 5.4 e, considerato l’elevato guadagno in continua dell’amplificatore,
ne risulta un sistema che, retroazionato, pur se tramite una rete che alle frequenze di lavoro si possa
considerare puramente resistiva, è caratterizzato da margine di fase insufficiente o anche da instabilità
già per piccoli guadagni di anello.
La compensazione in frequenza, nella quasi totalità dei casi, viene effettuata a polo dominante.
Ciò in quanto risulta la tecnica di implementazione più semplice (soprattutto in tecnologia monolitica)
e poiché produce una funzione di trasferimento caratterizzata da un determinato prodotto guadagnobanda e consente quindi nel sistema retroazionato di scambiare appunto guadagno con banda. Esistono
ovviamente eccezioni, anche notevoli, a questa regola, specialmente nelle strutture dedicate o
addirittura custom. Spesso la compensazione principale a polo dominante è poi accompagnata da
compensazioni locali o ausiliarie. Va poi notato che la compensazione, a livello monolitico, è attuabile
in forma semplice internamente al sistema integrato soltanto quando la struttura è quella della figura
5.1, cioè al più costituita da tre stadi; nel caso di un numero maggiore di stadi (ad esempio 4 come nel
caso del già citato 725) la rotazione di fase nel sistema di partenza risulta di entità tale la
compensazione deve essere attuata esternamente, cioè dall’utente che, guidato dalle indicazioni del
produttore, utilizza allo scopo opportuni terminali del dispositivo.
Nel caso degli amplificatori operazionali “general purpose”, cioè destinati all’uso corrente, non
dedicati, si richiede di norma margine di fase adeguato, cioè tale da garantire una risposta nel dominio
del tempo soddisfacente, in caso di retroazione puramente resistiva 5.5. Non deve cioè, in questo caso,
risultare necessaria una compensazione esterna. Si danno due possibili soluzioni: stabilità
incondizionata, stabilità condizionata.
Nel primo caso si richiede, e quindi il progettista deve garantire, margine di fase sufficiente
qualsiasi sia il guadagno, cioè sino a guadagno unitario. Nel secondo caso viene garantito un adeguato
margine di fase solo per guadagni ad anello chiuso superiori ad un certo valore minimo (tipicamente 5).
Nel primo caso il sistema è caratterizzato da un prodotto guadagno-banda effettivo (o reale); nel
secondo caso si definisce un prodotto guadagno-banda estrapolato (figura 5.2)
Ad esempio nell’amplificatore operazionale 741, in tecnologia bipolare standard, in assenza di compensazione i poli
principali si trovano rispettivamente a circa 20 kHz e 300 kHz, mentre le singolarità (zeri e poli, anche complessi
coniugati) a più alta frequenza compaiono a partire da alcuni MHz. La compensazione alla Miller (vedi nel seguito)
produce pole splitting dei poli principali e sposta anche le altre singolarità per cui i primi poli ad alta frequenza
(complessi coniugati) appaiono a circa 10 MHz.
5.5
Si considera la risposta ad un segnale di prova a gradino. Tale risposta non deve presentare eccessiva sovraelongazione
anche onde garantire accettabile settling time.
5.4
67
L’AMPLIFICATORE OPERAZIONALE
Ad
10 6
10 5
10 4
10 3
10
2
10
f
GBestr.
f
GB
1
1
10
10
2
10 3
10 4
10 5
10 6
10 7
10 8
Hz
Figura 5.2
Compensazione a polo dominante nei due casi di compensazione incondizionata GB e
condizionata GBestr.
La compensazione condizionata sposta il polo dominante a frequenze più alte e consente di
ottenere un prodotto guadagno-banda (estrapolato) superiore, ma utilizzabile solamente al di sopra di
un guadagno minimo.
Tranne casi, peraltro notevoli e di cui si discuterà nel seguito, la compensazione a polo
dominante non si può ottenere semplicemente introducendo una capacità addizionale nel nodo NG1. In
una struttura in cui i poli principali di partenza (cioè prima della compensazione) si trovano nel campo
delle frequenze sopra menzionato, o poco più in alto (da qualche kHz a qualche MHz) e con gli elevati
guadagni in gioco, è immediato verificare che per ottenere un polo effettivamente dominante, cioè un
prodotto guadagno-banda effettivo, e un margine di fase accettabile 5.6 si dovrebbe utilizzare una
capacità di centinaia di nF, cioè impensabile in un sistema monolitico (si pensi che la capacità di
compensazione utilizzata nel 741, pari a 30 pF, occupa poco meno di un terzo dell’area dell’intero chip
e cioè risulta più di 10 volte superiore a quella occupata da un normale transistore dell’amplificatore).
Inoltre un approccio di questo tipo condurrebbe a un prodotto guadagno-banda nel campo delle decine
di kHz, estremamente basso, assai inferiore a quello ottenibile attraverso l’utilizzazione di una capacità
amplificata cioè sfruttando il così detto “effetto Miller” (compensazione alla Miller); nel caso
dell’esempio precedente la compensazione alla Miller produrrebbe un prodotto guadagno-banda
dell’ordine del MHz.
Ricordiamo che in base al teorema di Miller una qualsiasi impedenza Zki posta tra due nodi i e k
di una rete elettrica può essere sostituita, senza alterare il bilancio delle correnti ai nodi stessi, con due
impedenze Zi e Zk applicate tra ciascuno dei nodi interessati e un terzo nodo di riferimento.
G ( s)
1
Z k ( s) Z ki ( s) ki
Z i ( s) Z ki ( s)
1 Gki ( s)
Gki ( s) 1
dove Gki(s) può essere definito come il guadagno di tensione tra i nodi i e k
5.6
Solitamente si considera adeguato un margine di fase compreso tra 60° e 90°.
68
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
Ovviamente Zi e Zk sono impedenze in generale di ”natura” diversa da Zki; in altre parole sono
diverse sia la parte reale che la parte complessa in quanto Gki è funzione della pulsazione complessa. In
particolare una capacità Cki non si trasforma in due capacità Ci e Ck, ma in impedenze complesse.
Peraltro è spesso utilizzabile una prima approssimazione che considera G indipendente da s, cioè, nel
campo delle frequenze di interesse, un guadagno costante. Se tale guadagno è >>1, nel caso di una
semplice capacità C si può considerare in prima, piuttosto grossolana, ma utile e significativa
approssimazione che essa risulti equivalentemente suddivisa in una capacità GC posta tra i e
(“ingresso”) e una capacità C posta tra k e (“uscita”)5.7. Si parla in questo caso, per quanto riguarda
Ci, di capacità amplificata per “effetto Miller”.
Cc
IN
I
STADIO
(INGRESSO)
NG1
II
STADIO
C1
NG2
III
STADIO
(USCITA)
OUT
C2
Figura 5.3
Compensazione a polo dominante “alla Miller”
Dunque per realizzare una compensazione in frequenza a polo dominante pur introducendo una
capacità di valore sufficientemente piccola per poter essere abbastanza agevolmente integrata in un
sistema monolitico, si può ricorrere all’effetto Miller che ne consente l’amplificazione. Con riferimento
alla figura 5.1 la capacità di compensazione Cc può essere posta a cavallo del II stadio realizzando così
una compensazione “alla Miller” (figura 5.3).
L’amplificazione del secondo stadio è sufficientemente grande da produrre una capacità
amplificata equivalente nel nodo NG1 molto maggiore di C1 e da introdurre così un polo
sufficientemente dominante. Questo tipo di compensazione è universalmente usato salvo in alcune
categorie di amplificatore dove non risulta né applicabile né necessario ( come già menzionato:
amplificatori per strumentazione, amplificatori operazionali a larghissima banda, amplificatori current
feedback mode, amplificatori video, ecc.).
L’approccio sopra utilizzato costituisce, come già detto, una prima e piuttosto grossolana
approssimazione e può essere sostituito da un’analisi alquanto più attenta, peraltro anch’essa di prima
approssimazione soprattutto in strutture non particolarmente semplici. Si tratta della ben nota
trattazione che conduce ad interpretare l’effetto della compensazione alla Miller in termini di “pole
splitting”: il collegamento dei due nodi di guadagno tramite la capacità Cc produce una migrazione dei
poli principali di partenza in direzioni opposte. Se il valore di Cc è sufficientemente elevato il secondo
polo si porta a frequenze sufficientemente elevate per realizzare una compensazione a polo dominante
5.7
L’approssimazione è passibile, per quanto riguarda la capacità equivalente in ingresso C i, di una semplice interpretazione
fisica: un segnale di ingresso vi, per quanto riguarda la sola capacità Cik posta tra i e k, deve fornire una carica che
corrisponde alla tensione che di fatto si sviluppa, in risposta al segnale stesso, tra k e i e cioè (G-1) Cik vi. ciò equivale
a dire che in ingresso la capacità Cik è vista come (G-1) Cik. Si tratta naturalmente di una approssimazione che
considera il trasferimento tra i e k descrivibile semplicemente attraverso un guadagno fisso di tensione (il guadagno in
continua o a centro banda)
69
L’AMPLIFICATORE OPERAZIONALE
(incondizionata o condizionata) mentre il primo polo si porta a frequenze corrispondentemente basse.
Ovviamente in una compensazione a polo dominante la distanza tra i due poli discende dal rapporto tra
i guadagni che ad essi corrispondono e risulta quindi in generale molto grande, considerato l’elevato
guadagno in continua degli OPA.
E’ comunque opportuno ripetere che tale trattazione costituisce comunque una
approssimazione, pur se comoda e significativa. Inoltre non fornisce in forma sufficientemente
semplice e immediata un modo per determinare in fase di progetto il valore da attribuire alla capacità di
compensazione; malgrado mostri che la compensazione alla Miller introduce uno zero nel semipiano
destro del piano complesso, spesso tale aspetto non viene messo in sufficiente evidenza e non vengono
forniti direttamente gli strumenti per ridurne adeguatamente il peso dal punto di vista dello sfasamento.
In altre parole è importante mettere in chiaro che il semplice pole splitting della compensazione alla
Miller deve essere accompagnato da provvedimenti in sede di progetto atti ad allontanare
sufficientemente lo zero dal prodotto guadagno-banda.
Un approccio assai utile sul piano progettuale, anche se pur sempre di prima approssimazione, è
quello che si basa su una analisi della trasmissione del segnale attraverso la struttura schematizzata
nella figura 5.3 condotta come segue. Lo stadio di ingresso può essere visto con buona
approssimazione come uno stadio a transconduttanza che converte il segnale di tensione in ingresso in
una corrente che alimenta il primo nodo di guadagno; a frequenze sufficientemente grandi rispetto a
quella caratterizzante il polo dominante il secondo stadio si comporta come un integratore attivo (si
consideri a titolo di esempio la figura 5.4) e la funzione di trasferimento può essere considerata essere
semplicemente
1 1 g m1
s s Cc
g
dove GB m1
è la pulsazione corrispondente all’attraversamento dell’asse a 0 dB e cioè quella
Cc
che misura il prodotto guadagno-banda (reale o estrapolato)
Q4
Q3
-
I stadio
Q2
Q1 gm1
Cc
+
+
C1
III
stadio
(uscita)
II stadio
gm2
C2
2I
Figura 5.4
Determinazione del prodotto guadagno-banda”
70
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
L’espressione del prodotto guadagno-banda è assai significativa, anche dal punto di vista
operativo, cioè progettuale.
In primo luogo essa mostra che il valore della capacità di compensazione è direttamente
proporzionale a GB e, da questo punto di vista, è dunque necessario operare con transconduttanze
dello stadio di ingresso tali da non determinare valori eccessivamente elevati di Cc che risulterebbero
non integrabili.
Nel caso della tecnologia bipolare ciò introduce quindi un vincolo per la corrente di lavoro del
primo stadio, coerente con quello derivante dalla necessità di ottenere la resistenza di ingresso più alta
possibile: la corrente di polarizzazione, a cui la transconduttanza risulta proporzionale, deve essere la
più piccola possibile compatibilmente con buone caratteristiche di guadagno e risposta in frequenza dei
transistori. Nel caso della tecnologia BiFet e della tecnologia CMOS la corrente di lavoro non influenza
di fatto la resistenza di ingresso e rimane solamente la condizione relativa alla capacità di
compensazione, ma la transconduttanza è intrinsecamente inferiore (tranne per dispositivi JFET
particolari) e dipendente attraverso la radice, cioè piuttosto debolmente, dalla corrente: è quindi
possibile lavorare con correnti di polarizzazione nettamente più elevate che non nel caso bipolare
(decine di A), tipicamente circa un ordine di grandezza superiori (centinaia di A), il che consente di
migliorare, anche se non di molto, le prestazioni di rumore serie e di risposta in frequenza.
In secondo luogo può, in un’ampia categoria di amplificatori, essere utilizzata per determinare,
in prima approssimazione, il valore della capacità di compensazione da utilizzare. In tecnologia
bipolare e BiFet il prodotto guadagno-banda ottenibile a seguito della compensazione può essere
considerato approssimativamente noto a priori in quanto dipendente dalla tecnologia, dalle architetture
circuitali che si prevede di adottare (numerosi vincoli, soprattutto nelle tecnologie meno avanzate,
riducono fortemente le soluzioni utilizzabili), dalle condizioni di polarizzazione dei dispositivi
(anch’esse solitamente molto vincolate). Dalla relazione precedente discende quindi
g
Cc m1
GB
L’approssimazione risulta ovviamente un poco grossolana, ma è di fatto sufficiente per un
primo progetto che deve ovviamente essere seguito da approssimazioni successive guidate da
procedimenti di simulazione e dall’esperienza. Va ricordato poi che parametri quali il prodotto
guadagno-banda, il margine di fase, ecc. risultano comunque notevolmente dispersi.
Il procedimento sopra indicato risulta di assai minore validità nel caso della tecnologia CMOS
(peraltro in dipendenza dalla particolare tecnologia adottata, in relazione alle dimensioni geometriche
dei dispositivi). Ciò è sostanzialmente dovuto ancora una volta al fatto che i dispositivi MOS sono
progettabili molto più liberamente in termini geometrici il che comporta anche una forte dipendenza
dalla geometria delle capacità in gioco (le capacità C1 e C2 nel semplice modello sopra considerato) e
quindi delle singolarità che caratterizzano il sistema prima della compensazione. Ne risulta maggiore
elasticità nel progetto e, in particolare il prodotto guadagno-banda non risulta predeterminato ma
gestibile, entro determinati limiti, da parte del progettista. Questi sistemi verranno più dettagliatamente
considerati nel seguito.
5.3 LO ZERO NEL SEMIPIANO DESTRO
Come detto la compensazione alla Miller introduce uno zero nel semipiano destro, conseguenza
della trasmissione bidirezionale del segnale attraverso la capacità di compensazione Cc posta a cavallo
del secondo stadio, il che rende a sfasamento non minimo la rete equivalente (non è applicabile il
teorema di Bode). Nel semplice modello adottato la pulsazione di tale zero è data da
g
Z m 2
Cc
71
L’AMPLIFICATORE OPERAZIONALE
e quindi la posizione dello zero è legata a quella del prodotto guadagno-banda attraverso il rapporto
delle transconduttanze del secondo e del primo stadio.
La posizione del secondo polo infine si può determinare notando che, nel caso di forte
separazione dei poli (sistema a polo dominante) sul secondo nodo di guadagno insiste una capacità
equivalente rappresentabile come la serie delle capacità Cc e C1 in parallelo con la capacità C2 e cioè,
nell’ipotesi, solitamente in sostanza verificata, che Cc >> C1 5.8
CC
C2* C1 1 2 C2
Cc
e quindi la pulsazione del secondo polo risulta approssimativamente
gm2
p2
C2*
ed è anch’essa direttamente proporzionale alla transconduttanza del secondo stadio.
In prima approssimazione, si può considerare questo il risultato del già menzionato “pole
splitting”. Il primo polo è
1
dove R1 e R2 rappresentano le resistenze dei due nodi della figura 5.3
wp 1 ;
gm 2R 1R 2CC
La transconduttanza del secondo stadio compare quindi al denominatore nell’espressione del
primo polo e al numeratore in quella del secondo e dunque funge da parametro di splitting dei poli
stessi. Infatti variare gm2 significa variare il guadagno in continua e quindi, a parità di altre condizioni
(R1, R2, gm1 e capacità) e quindi di prodotto guadagno-banda, variare in senso opposto la posizione dei
due poli principali.
E’ necessario ora distinguere il caso in cui l’amplificatore è dotato di uno stadio di uscita che
separa (entro certi limiti) il secondo nodo di guadagno dal carico esterno (amplificatori “stand alone”)
dal caso in cui tale stadio non è presente e il nodo in questione è quello di uscita e vede direttamente
applicato il carico (in genere amplificatori OTA “on chip”).
Nel primo caso C2 è una capacità interna al sistema, in prima approssimazione poco influenzata
dal carico esterno (è però, tranne casi particolari, anche il caso in cui l’amplificatore non è destinato a
pilotare capacità, se non assai piccole) e risulta quindi piccola rispetto a Cc. La capacità equivalente del
secondo nodo risulta allora semplicemente data da
C2* C1 C2
e risulta perciò piccola rispetto alla capacità di compensazione: il secondo polo è quindi agganciato allo
zero (tramite la transconduttanza del secondo stadio), ma a frequenze significativamente più alte. Va
poi preso in considerazione il fatto che, in strutture non particolarmente semplici e soprattutto in
tecnologie non avanzate, spesso tale polo è preceduto da altre singolarità di origine diversa, anch’esse
peraltro solitamente a frequenze notevolmente più alte di quella corrispondente al prodotto guadagnobanda: ad esempio nel 741 la capacità base-emettitore dei transistori trasferitori di corrente nello stadio
di ingresso è elevata essendo tali transistori dei pnp laterali e quindi introduce un polo reale a circa 15
MHz (il prodotto guadagno-banda è di poco superiore al MHz) e comunque è presente una
costellazione di poli (anche complessi coniugati) con parte reale compresa tra 10 e 15 MHz circa.
Quindi la singolarità di interesse dominante dal punto di vista del margine di fase è lo zero nel
semipiano destro e di questa si deve preoccupare in primo luogo il progettista.
5.8
Nel 741 Cc=30pF e C1 qualche pF e quindi il rapporto è solamente di circa una decade. Peraltro si tratta di una tecnologia
assai poco avanzata e comunque nel 741 a determinare la risposta a frequenze superiori a GB intervengono singolarità
dovute ad altre parti della struttura circuitale: in particolare i transistori pnp laterali trasferitori di corrente nello stadio
di ingresso.
72
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
Nel secondo caso l’amplificatore è solitamente destinato a pilotare un carico capacitivo tramite
uno stadio configurato come generatore di corrente. Ciò è particolarmente vero nelle strutture
analogiche on chip che sono implementate all’interno di un sistema VLSI CMOS in quanto destinate a
pilotare altre strutture CMOS o a operare con capacità commutate. In questo caso si richiede il
pilotaggio di capacità non troppo piccole, tipicamente dello stesso ordine di grandezza della capacità di
compensazione: è anzi pratica comune progettare l’amplificatore perché possa pilotare, con sufficiente
margine di fase, una capacità di valore massimo proprio uguale a quello di Cc. In questa situazione il
secondo polo sopra considerato si trova a
gm2
p2
CL
dove CL è la capacità di carico; per CL prossimo a Cc il secondo polo e lo zero destro risultano
praticamente sovrapposti e sono quindi ambedue da considerare per quanto riguarda l’ottenimento di
un adeguato margine di fase.
Nel primo caso considerato è necessario controllare la posizione dello zero portandolo a
frequenze sufficientemente alte e lontane dal prodotto guadagno-banda. In generale la frequenza a cui
portarlo per ottenere un prefissato margine di fase deve essere determinata sulla base della posizione
delle singolarità, anche ad alta frequenza, presenti nel sistema compensato; tale posizione può essere
stimata, ma di fatto è ottenibile attraverso un processo di simulazione a calcolatore. In ogni caso, di
larga massima e a titolo di guida, si può affermare che, per ottenere stabilità incondizionata con
adeguato margine di fase, lo zero deve essere posizionato solitamente tra una e due decadi al di sopra
del prodotto guadagno-banda.
Considerate le espressioni di Z e GB la posizione dello zero può essere controllata agendo sul
rapporto tra la transconduttanza del secondo stadio e quella del primo e cioè rendendo la
transconduttanza del secondo stadio sufficientemente grande rispetto a quella del primo.
Nel caso della tecnologia bipolare, e con le architetture circuitali più comunemente usate, ciò
risulta semplice. Il secondo stadio è solitamente riconducibile a una configurazione del tipo emettitore
comune in quanto si tratta di una semplice architettura atta a caricare adeguatamente il primo stadio e
produrre sufficiente guadagno: la sua transconduttanza è quindi controllabile direttamente attraverso la
corrente di lavoro a cui risulta proporzionale. E’ quindi sufficiente polarizzare il secondo stadio a
corrente sufficientemente elevata rispetto al primo, cosa facilmente realizzabile in considerazione
anche del fatto, già più volte menzionato, che, per ragioni connesse con la resistenza di ingresso e con
l’integrabilità della capacità di compensazione alla Miller, la corrente di lavoro del primo stadio deve
essere mantenuta la più bassa possibile, compatibilmente con il buon funzionamento in termini di
guadagno e risposta in frequenza dei dispositivi attivi. Si noti che lo zero destro “si trascina dietro” il
secondo polo, da esso normalmente assai distanziato [CC/(C1+C2)], e quindi non è normalmente
necessario intervenire separatamente su quest’ultimo.
Ovviamente, come già detto, vi sono anche eccezioni a questa situazione: in particolare gli
amplificatori operazionali a larghissima banda, gli amplificatori current feedback mode, gli
amplificatori per strumentazione, gli amplificatori video. Nell’ambito di queste ultime categorie la
compensazione non è neppure effettuata alla Miller.
73
L’AMPLIFICATORE OPERAZIONALE
+VCC
Q13
Q12
Q8
Q9
IN
IN
Q4
Q3
R0
12
550
Q2
Q1
12
A
A
Cc
A
Q14
Q7
Q15
Q11
Q5
Q10
R5
Q6
R2
R1
R2
R3
R4
-VCC
offset
adjust
Figura 5.5
Primo e secondo stadio dell’amplificatore operazionale 741”
Nella figura 5.5 sono rappresentati il primo e il secondo stadio dell’amplificatore operazionale
741. La corrente di lavoro dei transistori del primo stadio è di circa 12 A e quella del secondo stadio
di 550 A. Considerata l’architettura degli stadi, il rapporto tra le transconduttanze risulta quindi pari a
110, valore molto elevato giustificato dal fatto, già citato, che la presenza di poli di ordine superiore a
poco più di una decade di distanza da GB rende necessario un ulteriore allontanamento dello zero.
In tecnologia CMOS si verifica usualmente il secondo caso sopra descritto, cioè il caso in cui
secondo polo e zero a destra risultano molto vicini. E’ allora necessario spostarli molto lontano da GB
e non è possibile ottenere tale risultato semplicemente giocando sul rapporto delle transconduttanze tra
secondo e primo stadio. Qualora si adotti la compensazione alla Miller questa deve venire modificata
utilizzando al posto del semplice condensatore a cavallo del secondo stadio una rete un poco più
complessa.
Due sono gli approcci normalmente utilizzati.
Il primo consiste nel porre in serie alla capacità Cc un resistore (figura 5.6) il cui effetto è quello
di traslare lo zero verso frequenze più alte: un modello di prima approssimazione mostra che quando la
resistenza introdotta approssima l’inverso della transconduttanza dello stadio utilizzato per la
compensazione, lo zero si porta all’infinito; per valori più alti della resistenza lo zero passa nel
semipiano sinistro ed è possibile portarlo in prossimità di GB a contrastare il secondo polo, con
benefico effetto per quanto riguarda il margine di fase.
Il secondo consiste nel rendere unidirezionale, dall’uscita verso l’ingresso, il percorso del
segnale di retroazione capacitiva a cavallo dello stadio utilizzato. Ciò può essere ad esempio,
realizzato, almeno in prima approssimazione, pilotando Cc tramite un follower (figura 5.7).
L’argomento verrà discusso più approfonditamente nella trattazione relativa agli amplificatori
in tecnologia CMOS.
74
TECNOLOGIA BIPOLARE STANDARD: LO STADIO DI INGRESSO
M3
M4
M5
ID
ID
M1
IN
M7
Cc
IN
M2
CL
Rc
VG
M0
M6
Figura 5.6
Compensazione con capacità e resistenza di un OTA in tecnologia CMOS;
la resistenza è realizzata tramite il transistore M7 polarizzato in regione ohmica (nell’origine
delle caratteristiche)
M3
M4
M5
ID
ID
M1
Cc
M7
M2
CL
VG
M0
M8
M6
Figura 5.7
Compensazione con retroazione capacitiva unidirezionale di un OTA in tecnologia CMOS
75