APPROSSIMAZIONE DI SISTEMI DINAMICI
NON LINEARI DIPENDENTI DA PARAMETRI E
CARATTERIZZATI DA EQUILIBRI E CICLE LIMITE
Federico Bizzarri, Marco Storace
Dipartimento di Ingegneria Biofisica ed Elettronica, Università di Genova
Via Opera Pia 11a, 16145 Genova
Recentemente è stato affrontato il problema di approssimare, in vista di una possibile
realizzazione circuitale, sistemi dinamici non lineari che dipendono da parametri, con
particolare attenzione al caso in cui il comportamento asintotico sia stazionario o periodico
[1-3]. Si fa riferimento a un sistema di equazioni differenziali ordinarie del tipo
x = f (x(t); p)
(1)
n
q
dove x ∈ ℜ è il vettore di stato, p ∈ ℜ è il vettore dei parametri, la funzione continua
f : S⊂ℜn+q→ℜn è il campo vettoriale, S è un dominio (iper-rettangolare) compatto e
x rappresenta la derivata di x(t) rispetto al tempo.
L’obiettivo a lungo termine di questa attività di ricerca è la realizzazione circuitale di reti di
sistemi dinamici che si comportano come “monadi” (per realizzare, ad esempio, memorie
associative basate su attrattori periodici o caotici) oppure interagiscono, come nel caso dei
neuroni biologici. La realizzazione circuitale di reti di neuroni biologici è il principale
obiettivo del PRIN06 "Approssimazione di reti di sistemi dinamici non lineari (modelli di
neuroni biologicamente plausibili) e realizzazione di circuiti a struttura parallela per la loro
emulazione". Realizzare una rete composta da sistemi dinamici approssimati, che siano
governati da equazioni differenziali simili a quelle originali, permette, almeno in linea di
principio, l’elaborazione parallela di ingenti quantità di dati, superando così il limite imposto
dal calcolo digitale seriale, che attualmente impedisce la simulazione di reti di neuroni di
taglia realistica.
In [1] si è considerata un'approssimazione, mirata alla sintesi circuitale, di sistemi dinamici
non lineari che ammettono equilibri e/o cicli limite: sono questi i comportamenti base esibiti
dai neuroni biologici al variare di uno o più parametri di controllo, anche se in [1] sono stati
presi in esame sistemi più semplici. Al variare dei parametri che li caratterizzano, anche i più
noti modelli biologicamente plausibili di neuroni (ad esempio, quello di Hodgkin e Huxley o
quello di Hindmarsh e Rose) ammettono l’esistenza o la coesistenza di equilibri e cicli limite.
Dato quindi un modello di riferimento, occorre prima approssimarlo e poi realizzarlo
circuitalmente mediante una tecnica di sintesi ben definita e legata al metodo di
approssimazione. A questo scopo, è stata considerata una tecnica di approssimazione lineare a
tratti (PWL) sviluppata negli ultimi anni [4-6]. Tale tecnica, se confrontata con altri metodi
basati su splines, reti neurali o kernel, non è particolarmente efficiente in termini del numero
di parametri di approssimazione necessari per ottenere una precisione ragionevolmente
accurata. Il suo vantaggio principale è però l’aderenza pressoché diretta con la sintesi
circuitale delle funzioni approssimate [7,8].
Il metodo proposto permette di calcolare i coefficienti "ottimi" che pesano altrettante funzioni
base nell’espressione approssimata (PWL) del campo vettoriale f nell’equazione (1). I
coefficienti sono ricavati minimizzando opportuni funzionali, la cui definizione è indotta dalle
caratteristiche degli invarianti più significativi del sistema al variare dei parametri di
biforcazione. Questo tipo di impostazione permette di migliorare notevolmente i risultati
rispetto a quelli conseguiti se ci si limitasse a
minimizzare un funzionale standard, che tenga
conto solo dello scarto quadratico tra f e la sua
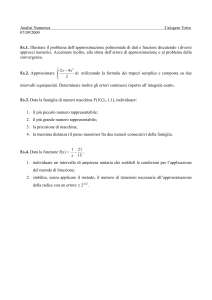
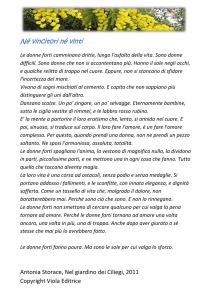
approssimazione. In Figura 1, ad esempio, sono
mostrati i risultati delle approssimazioni della
forma normale di Hopf (cono grigio) ottenute in
uno spazio tridimensionale con 100 funzioni base,
minimizzando un funzionale standard (a) e uno che
tenga conto della dinamica del sistema (b). Si può
notare come nella Figura 1(b) il ciclo nasca in
modo più "smooth" di quanto non avvenga in
Figura 1(a). Inoltre, in Figura 1(a) si nota la
presenza di una fascia di coesistenza di due cicli
limite dovuta alla presenza di due biforcazioni
sella-nodo di cicli limite, non contemplate dal
sistema dinamico originale. Nel complesso, i cicli
limite mostrati in Figura 1(b) sono più aderenti al
cono descritto dai cicli limite propri del sistema
originale.
(a)
(b)
Figura 1
Riferimenti bibliografici
[1] M. Storace, F. Bizzarri, "Towards accurate PWL approximations of parameter-dependent
nonlinear dynamical systems with equilibria and limit cycles," IEEE TCAS—I, vol. 54, pp. 620–
631, 2007.
[2] M. Bergami, F. Bizzarri, A. Carlevaro, M. Storace, "Structurally stable PWL approximation of
nonlinear dynamical systems admitting limit cycles: an example," IEICE Trans. Fund., vol. E89A, pp. 2759-2766, 2006.
[3] M. Bergami, F. Bizzarri, A. Carlevaro, M. Storace, M. Parodi, "Structurally stable PWL
approximation of a simple dynamical system," in Proc. Int. Symp. On Nonlinear Theory and its
Applications NOLTA’05, Bruges, Belgio, Ott. 18–21, 2005, pp. 54–57.
[4] P. Julián, A. Desages, B. D’Amico," Orthonormal high level canonical PWL functions with
applications to model reduction," IEEE TCAS—I, vol. 47, pp. 702–712, 2000.
[5] M. Storace, P. Julián, M. Parodi, "Synthesis of nonlinear multiport resistors: A PWL approach,"
IEEE TCAS—I, vol. 49, pp. 1138–1149, 2002.
[6] M. Storace, L. Repetto, M. Parodi, "A method for the approximate synthesis of cellular non-linear
networks—Part1:Circuitdefinition," Int. J. Circ. Th. Appl., vol. 31, pp. 277–297, 2003.
[7] M. Storace, M.Parodi, "Towards analog implementations of PWL two-dimensional non-linear
functions," Int. J. Circ. Th. Appl., vol.33, pp. 147–160, 2005.
[8] M. Parodi, M. Storace, P. Julián, "Synthesis of multiport resistors with piecewise-linear
characteristics: A mixed-signal architecture, " Int. J. Circ. Th. Appl., vol. 33, pp. 307–319, 2005.