Energia cinetica e lavoro
Consideriamo un oggetto puntiforme di massa m che si muove
~ che forma un angolo
lungo l’asse x, soggetto ad una forza F
φ con l’asse x. Sotto l’azione di questa forza il punto si
sposta lungo l’asse x con un’accelerazione a = ax = Fx/m,
con Fx = F cos φ.
Supponiamo che la forza agisca sull’oggetto per uno tratto
d. La velocità dell’oggetto cambia da un valore iniziale v0
a un valore finale v. Se la forza è costante, il moto è uniformemente accelerato e vale la relazione
v 2 = v02 + 2ad
⇒
1
mv 2
2
− 12 mv02 = mad = Fx d (∗)
Si definisce energia cinetica di un corpo puntiforme di massa
m e velocità v la quantità
K = 12 mv 2
[K] = [M L2 T −2]
La quantità Fx d è chiamata lavoro compiuto dalla forza
costante F sull’oggetto:
~ · d~ = F d cos φ
L = Fx d = F
La (*) si legge: la differenza tra l’energia cinetica finale e
quella iniziale dell’oggetto è pari al lavoro L compiuto dalla
forza F sull’oggetto: ∆K = Kf − Ki = L.
N.B.: questa espressione vale solo per forze costanti e oggetti
puntiformi.
Il lavoro è una grandezza fisica che esprime come l’energia
venga trasferita a un corpo tramite l’applicazione di una
forza. Il lavoro può essere sia positivo (φ < π/2) che negativo
(φ > π/2): se L > 0 l’energia cinetica finale è maggiore di
quella iniziale.
Prima di trattare il caso generale di una forza variabile, consideriamo il caso unidimensionale con una forza diretta lungo
l’asse x ma in modulo variabile: F = F (x). Per calcolare il
lavoro che questa forza compie su di un oggetto che si sposta
sotto l’azione di questa forza di un tratto d, suddividiamo lo
spostamento in intervalli infinitesimi ∆x, abbastanza piccoli
da poter ipotizzare la forza costante lungo ogni elemento.
Indichiamo con F̄j il valor medio della forza nell’intervallo
j-esimo
L’incremento di lavoro ∆Lj fatto dalla forza in questo intervallo è
∆Lj = F̄j ∆x
il lavoro totale si ottiene sommando su tutti i contributi
∑
∑
L=
∆Lj =
F̄j ∆x
Nel limite in cui facciamo tendere a zero ∆x si trova:
∫ xf
∑
F̄j ∆x =
F (x)dx
L = lim
∆x→0
xi
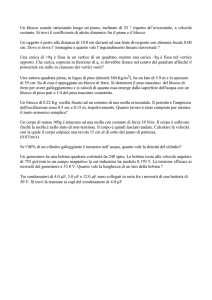
~ è variabile sia in modulo
Più in generale, quando la forza F
che in direzione, l’incremento di lavoro compiuto dalla forza
~ è dato da
nell’intervallo infinitesimo ds
~
~ · ds
δL = F
~ è il vettore tangente alla traiettoria del punto e di
dove ds
intensità pari all’elemento di linea e verso uguale a quello del
moto del punto
y
F~
~
ds
B
A
x
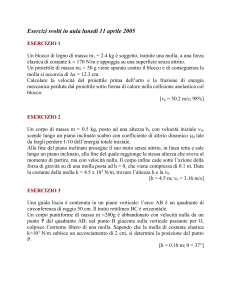
~ per spostare il punto dalla poIl lavoro fatto dalla forza F
sizione A alla posizione B è
∫ B
~
~ · ds
F
LAB =
A
dove l’integrale è lungo la traiettoria del punto: in pratica
~ si esegue il
si suddivide la traiettoria in tanti elementi ds,
~ e la forza F
~ e si sommano tutti i
prodotto scalare tra ds
contributi cosı̀ ottenuti. Se la forza è costante e la traiettoria è una retta si ritrova l’espressione precedente.
Lavoro e energia cinetica sono grandezze omogenee ed hanno
le stesse dimensioni
[Lavoro] = [F L] = [M LT −2L] = [M L2T −2]
Nel SI (o MKS) l’unità di misura del lavoro è il Joule (j)
1joule = 1newton × 1metro
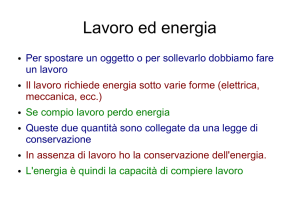
Esempio: lavoro della forza peso
~
ds
A
P~
A
P~
θ
B
a)
h
x
B
b)
y
~
La forza peso è costante, quindi LAB = m~g · d.
caso a) spostamento e forza sono paralleli:
LAB = mg(yb − ya ) = mgh
.
~ e lo spostacaso b) lo spostamento è h/ sin θ e l’angolo tra P
mento è (π/2 − θ)
h
π
cos( − θ) = mgh
sin θ
2
N.B.: non ci sono forze d’attrito: la velocità del punto in B
nei due casi è la stessa, quindi nei due casi si ha la stessa
variazione dell’energia cinetica e il lavoro della forza peso
deve essere lo stesso.
LAB = mg
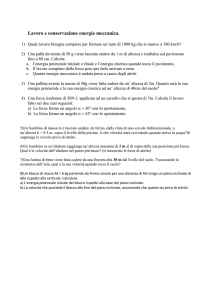
Esempio: lavoro della forza d’attrito
~
N
f~k
~v
~v
B
A
P~
a)
f~k
~
N
P~
A
h
x
θ
x
B
b)
in tutti e due i casi la forza di attrito dinamico fk = µk N
ha la stessa direzione dello spostamento ma verso opposto:
θ = π, di conseguenza il lavoro della forza di attrito è sempre
negativo.
caso a) N = mg quindi il lavoro della forza d’attrito nel tratto
AB è LAB = −µk mg(xB − xA)
caso b) N = mg cos θ
LAB = −µk mg cos θ (xB − xA) e il lavoro è tanto minore tanto
più il piano è inclinato.
~ è nullo.
N.B.in tutti e due i casi il lavoro di N
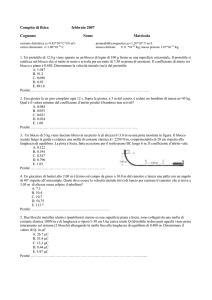
Esempio: lavoro della forza elastica
Consideriamo una molla con un estremo fisso e l’altro libero
a cui è attaccato un blocco. Allungando la molla di un tratto
x essa esercita sul blocco una forza di richiamo
F = −kx legge di Hooke
dove k è la costante della molla.
F~
O
O
x
F~
x
x
O
x
La forza della molla non è costante: il modulo è proporzionale
all’allungamento (o accorciamento) rispetto alla lunghezza
a riposo e ha sempre verso opposto allo spostamento.
Supponiamo di portare il blocco in xi (x = 0 è la posizione
del blocco quando la molla è a riposo) e di lasciarlo andare,
il lavoro compiuto dalla molla per portare il blocco nella posizione finale xf è
∫ xf
L=
(−kx) dx = 12 kx2i − 12 kx2f
xi
L è positivo se x2i > x2f , cioè quando e il blocco si avvicina alla
posizione di riposo (L è negativo quando se ne allontana).
Se xi = 0 e x la posizione finale
L = − 12 kx2
Supponiamo ora di spostare il blocco lungo l’asse x applicandogli una forza F~a . Durante lo spostamento questa forza
compie un lavoro La sul blocco mentre la forza di richiamo
della molla compie un lavoro Lm. La variazione di energia
cinetica del blocco è
∆K = Kf − Ki = La + Lm
Se il blocco prima e dopo lo spostamento è a riposo, Kf =
Ki = 0 e
La = −Lm
Quando il blocco è a riposo prima e dopo lo spostamento, il
lavoro fatto sul blocco dalla forza applicata è l’opposto del
lavoro fatto sul blocco dalla molla. In particolare il lavoro
della forza applicata è positivo quando il blocco si allontana
dalla posizione di riposo della molla.
Teorema dell’energia cinetica per una forza variabile
Consideriamo un corpo di massa m che si muove lungo l’asse
x e su cui agisce una forza variabile F (x) diretta lungo l’asse.
Il lavoro svolto sul corpo dalla forza F mentre si muove da
una posizione iniziale xi a una posizione finale xf è dato da
∫ xf
L=
F (x)dx
xi
dv dx
= m dx
per la 2a legge della dinamica F = ma = m dv
dt
dt
∫ vf
∫ xf
dv dx
dx =
mvdv = 12 mvf2 − 12 mvi2
L=
m
dx dt
vi
xi
= Kf − Ki = ∆K
Il lavoro fatto dalle forze che agiscono su un corpo è uguale
alla variazione della sua energia cinetica
LAB = ∆K = KB − KA
Potenza
Se un lavoro L è svolto da un forza in un intervallo di tempo
∆t, si definisce potenza media riferita a quell’intervallo di
tempo la quantità
L
P̄ =
∆t
La potenza istantanea (o potenza)
dL
dt
è la rapidità con cui viene svolto un lavoro (o si trasferisce
energia). La potenza è il lavoro fatto nell’unità di tempo.
P =
Nel SI l’unità di misura della potenza è il watt
1watt = 1joule/1sec
(Attenzione: il kilowattora è una misura di lavoro, infatti è
il lavoro fatto da una data forza in un’ora.)
Nel caso di un corpo che si muove in una direzione (ad
esempio lungo l’asse x) sotto l’azione di una forza costante
F che forma un angolo φ con la direzione del moto
dL
d(F x cos φ)
~ · ~v
=
= F v cos φ = F
dt
dt
dove x è la posizione istantanea del corpo e v la sua velocità.
Questa espressione della potenza vale solo per forze costanti
e quando l’oggetto si muove lungo una direzione fissata.
P =
La potenza è una grandezza scalare.
apriamo una parentesi...
Ricordiamo alcuni concetti dell’analisi che utilizzeremo in
seguito.
Data una funzione f (x) chiamiamo differenziale df la variazione della funzione tra i punti x e x + dx
f (x)
f (x + dx)
dθ
f (x)
df = f (x + dx) − f (x)
dx
x
x + dx
x
a meno di infinitesimi di ordine superiore
df = dx tan θ
ma tan θ è data dalla derivata di f (x), cioè tan θ =
( )
df
dx
df =
dx
df
dx
Questo si generalizza al caso di una funzione a più variabili,
per esempio f (x, y). In questo caso la variazione di f passando dal punto P = (x, y) al punto Q = (x + dx, y + dy) è
data dalla somma delle variazioni rispetto alle due coordinate
( )
( )
∂f
∂f
df =
dx +
dy
∂x
∂y
( )
( )
∂f
dove ∂x è calcolata tenendo fisso y e ∂f
è calcolata
∂y
tenendo fisso x (si usa il simbolo ∂ per indicare che si sta
facendo la derivata parziale della funzione rispetto a una
delle variabili, tenendo costanti le altre).
Esempio: f (x) = 3x5 − 4x2,
df
= 15x4 − 8x → df = (15x4 − 8x)dx
dx
Esempio: f (x, y) = 3x2 + 4y 3 + 5xy
∂f
= 6x + 5y
∂x
∂f
= 12y 2 + 5x
∂y
quindi
df = (6x + 5y)dx + (12y 2 + 5x)dy
L’integrale del differenziale di una funzione tra i punti A e
B è uguale alla funzione calcolata in B meno la funzione
calcolata in A, cioè è uguale alla variazione della funzione
tra A e B
y
∫
1
B
df = f (B) − f (A)
B
A
A
indipendente dal percorso
seguito.
2
x
Inoltre l’integrale del differenziale di una funzione su un ciclo,
cioè su un percorso chiuso
che parte in A e termina in
A, è pari a zero
∫ A
df = f (A) − f (A) = 0
y
A
A
x
Forze conservative
Una forza si dice conservativa quando il lavoro che fa per
spostare un punto materiale da A a B non dipende dal percorso, ma solo dalla posizione finale e da quella iniziale
∫
y
1
B
~
~ · ds
F
LAB =
B
A
LAB(lungo 1) = LAB(lungo 2)
2
A
x
y
Questo implica che se la
forza è conservativa, il lavoro su un ciclo è nullo
1
B
LAB(lungo 1) = −LBA(lungo 2)
2
A
x
LAB(lungo 1) +LBA(lungo 2) = 0
Possiamo dire che una forza è conservativa quando il lavoro
che essa compie in un ciclo è nullo.
Da quanto detto sui differenziali, se la forza è conservativa
~ deve essere il differenziale di una funzione
~ · ds
F
~ = −dU
~ · ds
F
la funzione U è detta energia potenziale
∫ B
∫ B
~ =−
~ · ds
F
dU = U (A) − U (B)
LAB =
A
A
se la forza è conservativa il lavoro che essa compie tra A e
B è uguale a meno la variazione dell’energia potenziale.
Esempi di forze conservative
~ = m~g
P Forza peso: P
A
A
1)
Calcoliamo il lavoro fatto
dalla
forza
peso
per
spostare un oggetto da A
a B lungo i due percorsi:
2)
θ
B
B
∫
L(1)
AB
C
∫
B
~ =
m~g · ds
=
A
yB
mgdy = mg(yB − yA)
yA
L(2)
AB = LAC + LCB = LAC
infatti LCB = 0 perchè lungo BC la forza e lo spostamento
sono perpendicolari. Indicando con x la coordinata lungo il
tratto AC
∫ C
π
LAC =
mg dx cos( − θ) = mg(xC − xA) sin θ
2
A
= mgd sin θ = mg(yB − yA)
dove d è la lunghezza del tratto inclinato.
Il lavoro della forza peso lungo i due percorsi è lo stesso: si
può verificare che questo è vero per qualsiasi percorso tra A
e B: quindi la forza peso è una forza conservativa.
~ = −k~
P forza elastica F
x
x
x
O
A
B
O
A
B
C
Calcoliamo il lavoro fatto dalla forza elastica nei due casi.
Nel primo caso l’oggetto viene spostato da A a B e il lavoro
della molla è
∫ xB
∫ B
1
1
~ =−
~ · ds
F
kxdx = kx2A − kx2B
LAB =
2
2
xA
A
Nel secondo caso l’oggetto viene spostato da A a C e poi
da C a B e il lavoro totale è
LAB = LAC + LCB
{
LAC = −
LCB =
∫ xC
xA
∫x
− xCB
kxdx = 12 kx2A − 12 kx2C
kxdx = 12 kx2C − 12 kx2B
→ LAB =
1
1 2
kxA − kx2B
2
2
il lavoro della forza elastica non dipende dal percorso, ma
solo dagli estremi, quindi la forza elastica è conservativa.
Energia potenziale
Data una forza conservativa, abbiamo introdotto l’energia
potenziale mediante
∫ B
∫ B
~ =−
~ · ds
F
dU = U (A) − U (B)
LAB =
A
A
per calcolare la variazione dell’energia potenziale tra i punti
A e B, occorre calcolare il lavoro che la forza conservativa
fa per spostare un punto materiale da A a B.
Ad esempio il lavoro fatto dalla forza elastica per spostare il
corpo dalla posizione x = 0 alla posizione x
∫ x
1
L0x = −
kxdx = − kx2
quindi
2
0
1
1
− kx2 = −[U (x) − U (0)] → U (x) = kx2 + U (0)
2
2
è l’energia potenziale elastica di una molla allungata (o accorciata) di un tratto x rispetto alla posizione di equilibro.
Siccome ci interessano solo le differenze di energia potenziale, possiamo fissare una posizione di riferimento e calcolare le differenze di energia rispetto a quella. Ad esempio
possiamo far corrispondere alla posizione a riposo della molla
un’energia potenziale nulla, cioè U (0) = 0, in questo modo
U = 12 kx2
energia potenziale elastica
Analogamente il lavoro fatto dalla forza peso per spostare
un corpo dalla quota y alla quota y = 0
Ly0 = mgy
mgy = −[U (0) − U (y)]
quindi
→
U (y) = mgy + U (0)
è l’energia potenziale gravitazionale di un corpo posto a una
quota y rispetto alla superficie della terra y = 0. Se al riferimento y = 0 facciamo corrispondere un’energia potenziale
nulla, si ha
U (y) = mgy
energia potenziale gravitazionale
L’energia potenziale gravitazionale di un oggetto dipende
dalla quota dell’oggetto rispetto alla superficie terrestre e
non dalla posizione orizzontale.
Energia Meccanica
Abbiamo visto due diverse equazioni che ci dicono come il
lavoro di una forza venga convertito in energia.
La prima
LAB = ∆K = KB − KA
mostra la relazione tra il lavoro fatto da una forza su un
corpo e la variazione della sua energia cinetica e vale per
tutte le forze.
La seconda
LAB = −∆U = −[U (B) − U (A)]
vale solo se la forza è conservativa, e mostra che il lavoro
fatto da una forza conservativa su un corpo è pari a meno
la variazione della sua energia potenziale.
Quindi per le forze conservative
{
LAB = ∆K
→
LAB = −∆U
KB −KA == −[U (B)−U (A)]
→
∆K = ∆U
→
KB +U (B) = KA +U (A)
la somma dell’energia cinetica e dell’energia potenziale è
detta energia meccanica
E =K+U
energia meccanica
L’equazione precedente diventa
EA = EB = costante
l’energia meccanica di un sistema isolato in cui sono presenti
solo forze conservative rimane costante durante il moto.
In generale un corpo ha una energia cinetica, dovuta al fatto
che il corpo si muove con una data velocità, e un’energia
potenziale, dovuta al fatto che il corpo occupa una data
posizione in presenza di una forza conservativa. Al passare
del tempo, l’energia cinetica e l’energia potenziale possono
variare ma la loro somma rimane inalterata nel tempo.
(N.B.: ragione del segno - nella definizione dell’energia potenziale: in questo modo è la somma delle due energie che
rimane costante).
Esempio: lanciando un oggetto in aria durante il moto di
salita la forza di gravità compie un lavoro negativo sull’oggetto che diminuisce la sua energia cinetica. L’energia cinetica
sottratta all’oggetto dalla forza di gravità viene trasferita
all’energia potenziale gravitazionale del sistema Terra-oggetto. Quando il moto si inverte, il lavoro sull’oggetto è positivo: la forza gravitazionale trasferisce energia dall’energia
potenziale gravitazionale del sistema Terra-oggetto all’energia cinetica dell’oggetto.
L’energia
potenziale
graviy
tazionale è: U (y) = mgy + U (0)
Se si trascura la resistenza
ymax
dell’aria (che non è una forza
conservativa),
la
legge di
conservazione
dell’energia
v0
meccanica tra lo stato iniziale
x
(oggetto lanciato verso l’alto
con velocità v0 ) e lo stato finale (oggetto che ha raggiunto
la quota massima con v = 0) dà:
1
mv02 + U (0) = 0 + mgymax + U (0)
2
→ ymax
v02
=
2g
Analogamente quando la palla si
trova ad una quota y con velocità v
1
1
mv02 +U (0) = mv 2+mgy+U (0)
2
2
quindi
y
ymax
v0
x
1
1
mv02 = mv 2 + mgy
2
2
(si capisce che la costante U (0) non è essenziale, perchè nel
bilancio energetico si cancella).
Durante la salita, y aumenta e l’energia potenziale del corpo
aumenta mentre l’energia cinetica diminuisce dato che la
loro somma è costante e pari all’energia cinetica iniziale.
Nella discesa, y diminuisce, quindi diminuisce l’energia potenziale e l’energia cinetica aumenta fino a raggiungere il valore
iniziale, quando l’oggetto tocca il suolo.
Esempio: un blocco viene lanciato con una certa velocità v
contro una molla; il blocco si muove sopra un piano orizzontale senza attrito e la molla è supposta ideale e di massa
trascurabile. Il blocco comprime la molla, si ferma dopo di
che la molla compressa si espande e il blocco si muove (in
senso opposto) e riacquista la
velocità iniziale. Nella prima
parte la molla compie un lavoro negativo sul blocco che
diminuisce la sua energia cinetica, che viene trasferita
all’energia potenziale elastica della molla.
La conservazione dell’energia meccanica tra lo stato iniziale e
stato finale (quando la compressione della molla è massima)
dà
√
1
1
m
mv 2 + U (0) = 0 + kx2max + U (0) → xmax = v
2
2
k
Nella seconda parte il lavoro della molla è positivo: la molla si
espande e l’energia potenziale della molla diminuisce fino ad
annullarsi (quando la molla raggiunge la posizione di equilibrio); contemporaneamente l’energia cinetica del blocco aumenta fino a raggiungere l’energia cinetica iniziale.
Grafico dell’energia potenziale
Consideriamo un oggetto costretto a muoversi lungo l’asse x
su cui agisce una forza F conservativa. L’energia potenziale
varia al variare della posizione dell’oggetto. Quando il punto
passa da punto x al punto x + ∆x, la variazione dell’energia
potenziale è
dU (x)
dx
Dalla funzione U (x) possiamo ricavare la forza conservativa
associata a questa energia potenziale.
∆U (x) = −L = −F ∆x → F (x) = −
dU
P se U (x) decresce,
< 0 → F > 0, cioè la forza ha lo
dx
stesso verso dell’asse x.
P se U (x) cresce,
opposto all’asse x.
dU
dx
> 0 → F < 0, cioè la forza ha verso
P se U (x) ha un minimo, dU
= 0 → F = 0, il valore di x
dx
per cui U ha un minimo è una posizione di equilibrio.
Esercizio: studiare la funzione U (x) = 12 kx2.
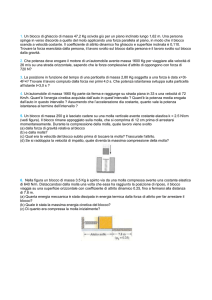
Supponiamo di avere un corpo che si muove lungo l’asse x
soggetto a forze conservative la cui energia potenziale abbia
il seguente grafico
Supponiamo inoltre che l’energia meccanica, che ha un valore costante, sia quella indicata in figura.
Dato che Emec = K + U , anche l’energia cinetica è funzione
della posizione dell’oggetto:
K(x) = Emec − U (x)
Poichè K è proporzionale a v 2 non può mai diventare negativa e quindi l’oggetto non può stare a sinistra di x1.
Quando l’oggetto si muove da x2 a x1 la sua energia cinetica
diminuisce fino ad annullarsi in x1, dove l’oggetto si ferma
istantaneamente. Tuttavia non può rimanere fermo lı̀ poichè
in x1 la derivata di U (x) 6= 0 e la forza F è positiva quindi
il punto si mette in moto verso destra, inverte cioè il suo
moto: x1 è detto punto di inversione ed è la posizione in cui
l’energia cinetica si annulla.
La forza lo spinge verso x2, il punto di minimo del potenziale: qui la forza si annulla, ma il corpo non si ferma perchè
ha una velocità diversa da zero. Dopo x2 la forza cambia
verso e la velocità del corpo diminuisce.
Conservazione dell’energia e forze non conservative
L’attrito è un esempio di forza non conservativa: infatti il
lavoro fatto da questa forza è sempre negativo, in particolare
il lavoro fatto lungo un ciclo non si annulla (ad es. il lavoro
della forza di attrito durante la salita lungo un piano inclinato
è uguale a quello fatto durante la discesa, tutti e due sono
negativi).
Nell’esempio precedente del blocco di velocità v lanciato contro una molla, se tra il piano orizzontale e il blocco c’e’ attrito, quando il blocco quando inverte il moto acquista una
velocità inferiore a quella iniziale: la forza di attrito svolge
un lavoro negativo sul blocco rallentandolo e trasferendo
parte della sua energia cinetica ad un’altra forma di energia, l’energia termica del sistema blocco-pavimento. Questo
trasferimento di energia non può essere invertito.
La forza di attrito è una forza non conservativa.
Nel caso in cui all’interno del sistema agiscano delle forze
non conservative, il lavoro totale delle forze è sempre uguale
alla variazione dell’energia cinetica:
Lforze non cons + Lforze cons = ∆K
Mentre solo per le forze conservative il lavoro è pari a −∆U :
Lforze cons = −∆U
Da cui
Lforze non cons = ∆Emec
l’energia meccanica totale non è costante ma subisce una
variazione pari al lavoro delle forze non conservative.
Lavoro svolto su un sistema da una forza esterna
Estendiamo la definizione di lavoro al caso di forze esterne
che agiscono su un sistema di corpi.
In assenza di attrito, il lavoro è l’energia meccanica trasferita
a o da un sistema per mezzo di una forza esterna che agisce
su di esso
L = ∆K + ∆U = ∆Emec
questo lavoro è positivo quando viene trasferita energia al
sistema, negativo quando viene sottratta energia al sistema.
Se il sistema consiste di un solo corpo puntiforme, il lavoro
svolto su di esso da una forza esterna può variarne solo
l’energia cinetica (∆K = L, teorema dell’energia cinetica).
In presenza di attrito, come ad esempio un blocco trascinato
lungo il piano con attrito, sappiamo per esperienza che il
blocco e il pavimento si scaldano durante il moto e non
tutto il lavoro viene trasferito all’energia meccanica.
Es.: consideriamo un blocco di massa m, velocità iniziale v0
che scivola su un piano in presenza di una forza di attrito
dinamico fk che supporremo costante. Supponiamo che vi
~ che tira il blocco nella
sia un forza costante orizzontale F
direzione dell’asse x per un tratto d aumentandone la velocità
fino al valore v. Per la seconda legge di Newton
F − fk = ma
(∗)
le forze sono costanti quindi il moto è uniformemente accelerato
v 2 − v02
2
2
v − v0 = 2ad
⇒ a=
2d
sostituendo in (*) si ottiene
(1
)
1
F − fk =
mv 2 − mv02 /d ⇒ F d = ∆K + fk d
2
2
il piano è supposto orizzontale e quindi non c’e’ variazione
dell’energia potenziale, ma in generale interviene anch’essa
F d = ∆Emecc + fk d
il termine fk d rende conto dell’incremento dell’energia termica dovuto allo strisciare del blocco sulla superficie
F d = ∆Emecc + ∆Eth
F d equivale al lavoro svolto dalla forza esterna sul sistema
blocco-pavimento, quindi
L = ∆Emec + incremento di energia termica
Principio di conservazione dell’energia totale
Questo principio non è dedotto da altre leggi fondamentali della fisica, esso è il risultato di evidenza sperimentale: l’energia totale di un sistema può variare solo se viene
trasferita energia dal di fuori o al di fuori del sistema. Con
energia totale si intende ogni forma di energia, meccanica,
termica, ed ogni altra forma di energia interna distinguibile
dalla termica: L = ∆E = ∆Emec + ∆Eth + ∆Eint .
In particolare per un sistema isolato (L = 0) l’energia totale
si conserva: ∆Emec + ∆Eth + ∆Eint = 0.