Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
UTILIZZO DEL DRONE PER RILIEVI DI PICCOLE E MEDIE DIMENSIONI
- ESEMPI PRATICI -
INTRODUZIONE :
In questo incontro vedremo un paio di esempi di rilievi reali eseguiti con l'ausilio del drone.
Saranno mostrate le metodologie e i singoli passaggi per ottenere una ricostruzione 3D
perfettamente in scala del terreno, partendo dalle immagini fotografiche scattate in volo da un
quadricottero.
Mentre fino a qualche anno fa tali metodologie di rilievo erano riservate esclusivamente a rilievi di
grandi estensioni, attualmente, grazie anche all'abbattimento dei costi dell'attrezzatura e allo
sviluppo di nuovi applicativi software, è possibile pensare di utilizzare la aerofotogrammetria per i
rilievi di modesta entità, sia come sostituto dei rilievi tradizionali, ma soprattutto come integrazione
dei rilievi eseguiti con stazione totale o GPS.
Le possibilità offerte da tali metodologie sono molteplici, sia in ambito topografico ma anche in
ambito ambientale, archeologico, pubblicitario, ecc...
Prima di addentrarci nello specifico di come eseguire un rilievo, è necessario fornire alcune
definizioni per meglio comprendere alcuni concetti che saranno di seguito esposti.
DRONE = Velivolo privo di pilota e comandato a distanza, usato generalmente per operazioni di
ricognizione e sorveglianza, oltre che di disturbo e inganno nella guerra elettronica; è indicato
anche con la sigla RPV, dalle lettere iniziali dell’ingl. Remotely Piloted Vehicle «veicolo guidato a
distanza».
(Drone utilizzato negli esempi trattati)
Fotocamera:
Per le operazioni di rilievo il drone deve essere dotato di apparecchiatura fotografica (fotocamera
digitale) di discreta qualità. Devono essere noti i parametri dell'ottica (lunghezza o distanza focale,
lunghezza focale equivalente, angolo di vista o di ripresa) nonché la risoluzione del CCD (sensore
digitale).
La fotocamera deve essere montata su un supporto mobile stabilizzato dotato di giunti cardanici
sui 3 assi (gimball) e deve avere l'obbiettivo puntato verso il basso con direzione ortogonale al
terreno (nadirale).
Ad esempio, la fotocamera utilizzata negli esempi che seguiranno ha una risoluzione di 12
MegaPixel (4000x3000) e una lunghezza focale equivalente riferita al formato 135 pari a 20 mm (la
lunghezza focale effettiva è di 4 mm).
(Vedi: http://visualia.giovannilattanzi.it/002758_aps-pieno-formato-e-lunghezza-focale-equivalente/)
Per valutare l'area coperta da una singola foto è necessario conoscere l'angolo di campo α.
Se non è fornito, per il calcolo si utilizza questa semplice relazione :
1
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
(angolo di ripresa)
α = 2*atan(d2/f)
dove d2 è la metà della diagonale dell'area della pellicola o del sensore (utilizzando lo standard
135, ovvero 24x36 mm, d2=21.63 mm) e f la distanza focale.
Nella fotocamera da noi utilizzata abbiamo : α = 2*atan(21.63/20) = 104.98 gon (94.48 deg).
(questo rappresenta l'angolo di ripresa della diagonale della foto).
Area di ripresa:
Per valutare l'area di ripresa a terra è necessario stabilire una quota di volo del drone.
Negli esempi che seguono abbiamo fatto volare il drone ad una altitudine di circa 40 mt, per cui la
misura della diagonale a terra risulta :
diagonale = 40 x tan (α/2) x 2 = 86.51 mt.
considerando che il rapporto del sensore è 4/3 (4000 x 3000) si ricavano le dimensioni dell'area di
ripresa a terra da una quota di 40 mt, ovvero :
Lato maggiore = 4 x diag / 5 = 69.21 mt
Lato minore = 3 x diag / 5 = 51.91 mt
Le dimensioni dell'area di ripresa sono importanti per programmare la sessione di volo e per
stabilire la risoluzione delle foto a terra (GSD = Ground Sampling Distance).
Spesso risulta utile stabilire a priori la risoluzione delle foto (in funzione del tipo di lavoro che si
intende eseguire) e poi calcolare la quota di colo in base alla risoluzione del sensore.
La GSD si esprime in cm/pixel.
PROGRAMMARE UN VOLO PER IL RILIEVO TOPOGRAFICO :
(Progetto di una presa aerea)
Per il momento tralasciamo tutte problematiche legate al regolamento ENAC relative al
conseguimento della "licenza" di volo per le operazioni specializzate non critiche, in questa
conferenza ci si soffermerà principalmente sulle operazioni tecnico-topografiche, la parte
burocratica e di regolamento sarà accennata alla fine.
Per i rilievi trattati in questa conferenza (piccola e media estensione) è auspicabile avere una
buona risoluzione della nuvola di punti finale (inf 5 cm/pixel) per cui è utile lavorare ad altitudini non
troppo elevate.
2
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
Come ordine di grandezza possono andare bene altitudini comprese tra i 30 e 50 metri (negli
esempi che seguiranno si è volato a 40 mt.).
Più aumenta l'altitudine più diminuisce la risoluzione delle foto e il conseguente livello di dettaglio
della nuvola di punti.
Una volta stabilita la quota possiamo calcolare le dimensioni dell'area di ripresa a terra (come visto
prima).
Per l'acquisizione dei dati fotografici esistono 2 modalità:
1) Modalità automatica attraverso l'utilizzo dei waypoints.
2) Modalità manuale con acquisizione visiva delle foto da utilizzare.
SCHEMI DI PRESA AEREA :
- Caso generale: strisciate in una sola direzione
La sovrapposizione raccomandata per la maggior parte dei casi è di almeno il 70-75% di
sovrapposizione longitudinale - overlap (rispetto alla direzione di volo) ed almeno il 50-60% di
sovrapposizione laterale - overside (tra le strisciate).
E’ fortemente raccomandato lo scatto delle immagini con una griglia regolare. La fotocamera deve
essere mantenuta il più possibile a un'altezza costante sul terreno/oggetto per garantire il GSD
desiderato. Se non è possibile variare la quota è auspicabile configurare l’altezza di volo in
funzione della zona più bassa da riprendere (ostacoli permettendo).
Preparazione della missione di volo:
Una volta individuata la zona da rilevare è utile determinare preventivamente le dimensioni
approssimate della stessa anche attraverso le immagini satellitari messe a disposizione dalla rete
Google o Bing (Thopos Mappe).
3
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
Come detto, le foto che andremo a scattare devono coprire l'intera area e essere tra loro
sovrapposte per almeno il 7 %.
Per ottenere questo il drone dovrà procedere a "zig.zag" fino a coprire l'intera area ovvero
eseguire le cosiddette "strisciate" tra loro staccate di una determinata misura.
Per stabilire la distanza tra le varie strisciate è sufficiente conoscere il lato del fotogramma a terra
ortogonale alla direzione di volo (di solito il lato maggiore) e ridurlo di circa il 50 % per garantire
anche lungo le strisciate delle zone di sovrapposizione (overside).
Nel nostro caso il lato maggiore è largo 69.21 mt per cui, tenendo conto delle opportune
approssimazioni che il volo comporta, si può facilmente stabilire una distanza di 33-35 mt. tra le
strisciate.
Lungo la direzione di volo il drone procede a velocità costante ed esegue delle foto con una
temporizzazione stabilita (timelaps).
Queste sono le regole della fotogrammetria tradizionale ma vanno benissimo anche in questo
contesto.
4
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
E' utile non esagerare con la velocità di volo (maggiore è la velocità maggiori sono le
approssimazioni e minore sarà la qualità delle foto).
La velocità di volo è in genere proporzionata alla quota, per questo tipo di rilievi si può applicare
una regola empirica che stabilisce 1 m/s di velocità ogni 10 mt di quota.
Per cui, volando a 40 mt. di quota si può far avanzare il drone alla velocità di 4 m/s.
Una volta definita la velocità il calcolo della temporizzazione degli scatti è immediata:
Il lato a terra misura 51.91 mt, dobbiamo garantire una sovrapposizione del 70 % per cui il drone
dovrà avanzare del 30% della lunghezza, ovvero 15.57 mt.
Viaggiando a 4 m/s ci impiega 3.89 secondi a percorrere tale distanza per cui si può facilmente
impostare un intervallo di scatto tra 2 foto di 3 secondi (per sicurezza in genere si abbassa
ulteriormente il tempo, le quantità di foto che i moderni programmi sono in gradi di elaborare sono
notevoli).
Se si utilizza il metodo automatico di rilievo tramite i waypoints allora si imposterà nel software di
gestione del drone i parametri appena calcolati (o li calcola automaticamente il software) e si
avvierà la missione (in questo caso è necessario un buon segnale GPS per consentire al drone di
posizionarsi correttamente lungo le strisciate).
Thopos dispone di funzioni specifiche per pianificare la missione di volo e esportare la missione
direttamente nell'APP che gestisce il drone in modo da realizzare il volo e le fotografie in maniera
automatica.
Se si decide di eseguire il rilievo in manuale bisognerà scattare le foto manualmente basandoci sui
dati di telemetria trasmessi dal drone (velocità, quota, ecc...).
- Caso di edifici singoli : Presa per modellazione 3D di edifici
Ricostruire edifici 3D richiede un piano di acquisizione immagini specifico. Occorre effettuare un
primo volo intorno all'edificio con la fotocamera inclinata di un angolo di 45°. E procedere
successivamente una seconda e terza volta, sempre intorno all'edificio, aumentando l'altezza di
volo e diminuendo l'angolo della telecamera ad ogni turno.
E’ raccomandabile prendere una serie di immagini ogni 5-10 gradi per garantire sufficiente
sovrapposizione, a seconda delle dimensioni dell'oggetto e la distanza rispetto ad esso.
L'altezza di volo non deve essere aumentata più di due volte tra i voli.
Il software Photoscan (utilizzato di seguito) genera una ottima nube di punti per le immagini
oblique di edifici, ma non può generare alcun orthomosaico per mediare il valore del GSD, come
invece avviene con le prese nadirali (obiettivo orientato ortogonalmente al piano).
5
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
Per queste operazioni è utile utilizzare un funzione dell’APP che gestisce il drone denominata
“POI” (Point Of Interest) che permette di eseguire un volo circolare con camera puntata verso un
punto (Edificio)
- Caso di aree urbane : Presa per modellazione 3D di aree urbane
La ricostruzione 3D delle aree urbane richiede una doppia griglia per il piano di acquisizione
immagini, in modo che tutte le facciate degli edifici (a nord, ovest, sud, est) siano visibili sulle
immagini. La sovrapposizione dovrebbe essere uguale a quella del caso generale.
Affinchè le facciate siano visibili, il drone deve volare con un angolo obliquo compreso tra 10º e
35º e quindi non con prese nadirali.
Se è necessario un maggior numero di dettagli, le immagini aeree dovrebbero essere
combinate con quelle terrestri.
Ogni set di immagini deve essere ben sovrapposto ed è raccomandabile utilizzare punti di
aggancio manuali GCP, per georeferenziare correttamente i diversi set di immagini.
Operazioni preliminari al volo:
Una volta preparate la missione di volo è necessario sottostare ad alcune operazioni preliminari
prima di eseguire materialmente il volo.
La sicurezza prima di tutto, sia per le persone che per le cose che interessano la zona del rilievo.
1) Controllare le condizioni meteo (pioggia e vento forte non sono adatti per questo tipo di rilievi)
2) Per una migliore resa delle foto è preferibile avere una buona illuminazione solare. Le ore
migliori sono quelle centrali della giornata per evitare di avere le ombre degli oggetti rilevati che si
"allungano" troppo.
3) Assicurarsi di avere copertura GPS per volare in modalità "sicura"
4) Decollare da zone sufficientemente ampie e prive di ostacoli e poste in piano
5) Verificare che il drone sia controllabile attraverso un piccolo volo in manuale, questo assicura
che non ci siano interferenze radio sulle frequenze utilizzate.
6) Se nella zona del rilievo è prevista la presenza di persone e/o animali programmare il volo
quando quest'ultima è al minimo.
7) Se si tratta di operazioni critiche procurarsi preventivamente tutti i permessi.
Checklist prima del decollo (DJI Phantom 3) :
6
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
1) Controllare lo stato delle batterie del drone, del controller e dell'eventuale tablet
2) Verificare che le eliche siano integre e ben fissate
3) Disattivare per sicurezza il bluetooth e il wifi del proprio dispositivo (si consiglia la modalità
"aereo")
4) Verificare di avere sufficiente memoria libera nella scheda SD della fotocamera
5) Fare la calibrazione del compass (Bussola magnetica)
6) Attendere che il drone si colleghi a più satelliti possibile
7) Fissare prima di partire il punto di "return to home" in caso di anomalia
se tutto è ok allora si può far decollare il velivolo e procedere con il rilievo.
Negli esempi che seguiranno si è utilizzato un drone DJI Phantom 3 Advance.
IL RILIEVO DI APPOGGIO :
Fondamentale per una corretta calibrazione (georeferenziazione) della nuvola di punti è il rilievo di
appoggio su dei punti noti ( GCP: Ground Control Point).
I punti da rilevare devono avere determinate caratteristiche:
1) Devono appartenere alla zona del rilievo
2) Devono essere visibili e identificabili dall'alto. Si consiglia di rilevare punti con contrasti cromatici
elevati, ed esempio una zona di passaggio tra asfalto (cemento) e erba, la differenza elevata di
colorazione lo rende facilmente identificabile dalle altitudini di rilievo del drone. In alternativa è
possibile utilizzare dei targhet topografici di adeguate dimensioni.
3) Devono essere distribuiti in maniera abbastanza omogenea nell'intera area del lavoro sia in
planimetria che in altimetria (punti alti e punti bassi).
Per calibrare una nuvola nello spazio servono minimo 4 punti noti, ma come sempre è necessario
rilevare un numero sovrabbondante in modo da valutare gli scarti e la precisione del rilievo.
Thopos esegue la calibrazione della nuvola con algoritmi di calcolo ai minimi quadrati.
Il rilievo di appoggio potrà essere eseguito con qualsiasi strumentazione (stazione totale o GPS)
basta che sia un rilievo 3D, tutti i punti devono essere provvisti di quota (o dislivello), la
trasformazione della nuvola di punti è una trasformazione 3D.
Negli esempi che seguiranno sono stati utilizzati sia targhet delle dimensioni circa 60x60 cm (auto
costruiti) e sia punti identificabili nel terreno. La strumentazione utilizzata è stata una antenna GPS
collegata alle rete regionale controllata dal modulo C (Controller GNSS) di Thopos 7.
Il rilievo di appoggio viene in genere eseguito prima delle operazioni di volo. Sarebbe auspicabile
che rilievo e volo vengano eseguiti nella medesima giornata. Se si utilizzano dei targhet mobili
questi devono essere posizionati, rilevati, fotografati e poi rimossi.
Terminato il rilievo di appoggio e il volo con il drone le operazioni sul campo sono terminate e si
passa all'elaborazione dei dati in ufficio.
ANALISI ED ELABORAZIONE DELLE FOTOGRAFIE :
Arrivati in studio si procede con lo scarico delle foto memorizzate nel drone (in genere una scheda
di memoria micro SD). Si consiglia di copiare le foto su una cartella specifica unica per quel rilievo.
Si procederà poi con l'analisi delle singole foto (si tratta di un'analisi visiva), per ogni foto si dovrà:
7
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
1) Verificare la corretta inquadratura (l'asse ottico deve essere ortogonale al terreno)
2) Verificare la qualità dell'immagine (foto mosse o sfocate)
3) Verificare l'esposizione (fotto sotto-esposte o sovra-esposte)
4) Verificare l'ordine sequenziale in base alle strisciate (non è indispensabile ma è preferibile)
Le eventuali foto mosse o sfocate dovranno essere eliminate, sono difetti difficilmente eliminabili
con i software di post-elaborazione, mentre le foto male esposte potranno essere sistemate con i
programmi di fotoritocco. Si tratta di evenienze poco probabili con le moderne apparecchiature
fotografiche.
In nessun caso le foto dovranno essere ridimensionate, ruotate, ritagliate ecc..
In alcuni casi (ma non riguardano l'ambito topografico) è possibile applicare alle foto delle
maschere nelle zone dove non vogliamo venga elaborato il modello 3D (togliere lo sfondo su
ricostruzioni di soggetti o manufatti in primo piano, ad esempio il rilievo di una statua).
Terminata l'analisi e l'eventuale sistemazione delle foto si passerà all'elaborazione vera e propria
del modello 3D.
Per la ricostruzione del modello 3D abbiamo utilizzato il software Photoscan dell'Agisoft nella sua
versione standard (www.agisoft.com).
Per una spiegazione analitica dei calcoli eseguita dal programma per la ricostruzione del modello
3D vedere la dispensa allegata (Fotogrammetria_ricostruzione_3d.pdf)
Il software è disponibile solo in lingua Inglese ma è molto semplice da utilizzare, vediamo i vari
passaggi per la costruzione della nuvola di punti.
1) Avviare il programma ed aggiungere un modello (Chunk). Tasto dx su Workspace.
La prima volta che si avvia Photoscan è consigliabile configurare l'accelerazione hardware
"OpenCL" andando nel menu "Tools" -> "Preferences...". Nella scheda OpenCL selezionare la
scheda video installata nel PC (OpenCL devices) e configurare un numero di core della CPU pari
al numero totale meno le periferiche OpenCL utilizzate.
Se ad esempio si utilizza un processore Intel I7 con 8 core e una scheda video compatibile
OpenCL il numero di core da utilizzare sarà uguale a 7 (8 - 1).
8
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
2) Dopo aver inserito un nuovo "Chunk" aggiungere le foto del modello (Click con tasto dx sul
modello 1, Chunk 1) e selezionare in blocco tutte le foto salvate in precedenza nella cartella
specifica.
le foto inserite compariranno sia sulla struttura ad albero e sia come miniature in basso.
Per i rilievi topografici non servono altre impostazioni. Utilizzando il formato jpg le informazioni
sulla fotocamera (ottica, ISO, ecc..) sono contenuti nella foto stessa (dati raw) e il programma
provvederà a leggerli automaticamente.
3) Dopo aver inserito le foto è necessario procedere con l'allineamento. Allineamento delle foto
(Menu "Workflow" -> "Align Photos")
9
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
Vanno bene i valori di default: Accuratezza massima (High) e preselezione degli accoppiamenti
disabilitata (Pair Preselection -> disabled).
Il programma cercherà i punti in comune tra le foto e procederà all'allineamento delle stesse in
base alle relazioni analitiche che sussistono tra i punti in comune (per approfondire l'argomento
vedere dispensa su fotogrammetria allegata: Fotogrammetria_ricostruzione_3d.pdf).
Si tratta di calcoli molto complessi che occupano CPU (processore del computer) e GPU
(processore video) in maniera consistente, richiedono in genere del tempo per l'elaborazione. I
tempi di elaborazione sono proporzionali al numero di foto da elaborare.
Per questo genere di calcoli conviene dotarsi di un computer con buone prestazioni sia in termini di
CPU che di scheda video (GPU).
Terminata l'elaborazione il programma mostrerà a video i punti in comune (Tie points) tra le foto
che ha utilizzato per l'allineamento e che utilizzerà per la costruzione delle nuvola di punti. Mostra
anche la posizione calcolata della fotocamera per ogni singolo scatto.
Nell'immagine che segue vediamo i punti in comune (Tie Points) che risultano essere 14615 e la
posizione della fotocamera per ogni immagine (rettangolo blu).
10
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
Una volta verificata la bontà dell'allineamento delle foto si passerà all'elaborazione della nuvola
vera e propria.
Andare nel menu "Workflow" e selezionare il comando "Build dense Cloud..."
Nella finestra che compare è sufficiente lasciare i parametri di default:
11
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
(Creazione della nuvola di punti)
Modificando la qualità (Quality) si va a modificare il numero di punti della nuvola finale. Maggiore è
la qualità, maggiore sarà il numero di punti che formerà la nuvola.
Per le precisioni richieste dal rilievo topografico la qualità media è più che sufficiente, ma volando
potrà essere diminuita come aumentata.
Aumentando al qualità aumenteranno anche i tempi di elaborazione.
Il filtro di profondità (Depth filtering) va lasciato su "Aggressive" per ottenere i risultati migliori.
Per avviare il calcolo premere "OK".
Anche in questo caso il calcolo richiede parecchio tempo (dipende del numero delle foto) e
impegna il computer (CPU e GPU) in maniera importante.
Terminata l'elaborazione la finestra di calcolo sarà chiusa e per visualizzare la nuvola di punti
basta premere il relativo pulsante della barra strumenti (vedi immagine).
12
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
A questo punto le operazioni su Photoscan sono quasi terminate. Se vogliamo è possibile
eliminare delle porzioni della nuvola (punti) che non ci interessano, per fare ciò basta utilizzare gli
strumenti di selezione (vedi immagine)
(selezione punti della nuvola)
per selezionare a video i punti che vogliamo eliminare e poi premere il tasto "Canc" della tastiera.
In questo modo si "alleggerisce" la nuvola e si rendono le operazioni successive più snelle e
veloci.
A questo punto non resta che esportare la nuvola in formato ply e poi procedere con le operazioni
topografiche.
Andare nel menu "File" e selezionare la voce "Export Points"
(Esportare la nuvola di punti)
nella finestra di salvataggio che compare selezionare il formato "STANFORD ply (.ply)", immettere
un nome del file e premere "Salva".
Comparirà una finestra con le opzioni di salvataggio nella quale dovremmo aver cura di disabilitare
l'opzione "Binary encoding" in modo da creare un file ASCII che potrà essere importato facilmente
da Thopos 7.
13
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
(Esportazione file PLY)
Per creare il file premere "OK".
In alternative è possibile esportare la nuvola in formato LAS (LAser Scanner).
Ora vediamo come georeferenziare la nuvola sul rilievo di appoggio, abbandoniamo Photoscan
versione standard e passiamo a Thopos 7.
INQUADRAMENTO DELLA NUVOLA SUL RILIEVO DI APPOGGIO :
Per tutte le operazioni topografiche che seguono utilizziamo il software topografico Thopos 7.
Importazione ed elaborazione del rilievo di appoggio:
In questa prima fase si procederà con l'importazione del rilievo di appoggio. Negli esempi che
seguono, avendo utilizzato direttamente Thopos in campagna con il modulo C (Controller GNSS),
ci si limiterà ad aprire il file del rilievo.
Se il rilievo è stato eseguito con altra strumentazione topografica si procederà all'importazione del
relativo formato.
Il rilievo così importato si potrà elaborare su qualsiasi sistema di riferimento utilizzando le ampie
possibilità messe a disposizione da Thopos.
(si tralasciamo in questa sede le modalità di importazione ed elaborazione del libretto su Thopos,
esistono vari video sull'argomento che è possibile visionare).
Importazione della nuvola di punti "grezza" :
Per caricare la nuvola su Thopos procedere come segue:
1) Creare un nuovo layer che conterrà la nuvola da importare
2) Andare nella scheda "Modelli 3D" -> "Nuvola di punti" -> "Importa"
14
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
a questo punto il programma chiederà di attribuire un nome alla nuvola. Inseriamo il nome e
confermiamo con il tasto "Invio", si aprirà la finestra di apertura file che ci consentirà di selezionare
il file PLY della nuvola creato da Photoscan come sopra.
Dopo una breve fase di lettura il programma ci inviterà a salvare la nuvola su un file in formato
Thopos per poter essere gestita facilmente all'interno del programma.
La nuvola così selezionata comparirà a video.
La nuvola risulterà orientata e scalata in maniera casuale, avrà le proporzioni della zona rilevata
ma non disporrà di alcun riferimento topografico.
Spesso le nuvole di punti così importate hanno alcuni degli assi cartesiani invertiti rispetto
l'orientamento XYZ reale. Per facilitare la selezione dei punti omologhi e per visualizzare un
modello 3D orientato come nella realtà è possibile invertire gli assi della nuvola con dei comandi
specifici ("Modelli 3D" -> "Nuvole di punti" -> "Inverti assi").
(Inversione assi nuvola)
La nuvola potrà essere visualizzata sia nella grafica planimetrica e sia nella grafica 3D.
Georeferenziazione della nuvola di punti :
Prima di procedere con la procedura di georeferenziazione è utile individuare nella nuvola i punti di
appoggio ed evidenziarli con un cerchietto, questo per facilitare la successiva selezione.
Attiviamo gli snap su nuvola e su punto topografico ...
(Osnap su punto topografico e su punto nuvola)
e procediamo con il tracciamento dei cerchi.
15
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
(targhet mostrato nella nuvola di punti)
Terminata l'evidenziazione dei punti si passa alla georeferenziazione vera e propria.
Andiamo nella scheda "Modelli 3D" -> "Nuvole di punti" -> "Georeferenzia".
A questo punto bisogna procedere con la selezione dei punti omologhi, ovvero coppie di punti
identificabili nella nuvola e rilevati con il rilievo di appoggio.
Si seleziona nell'ordine il punto della nuvola (verificare di aver attivato lo snap su nuvola) e il
rispettivo punto topografico rilevato.
Per poter georeferenziare una nuvola sono necessari almeno 4 punti omologhi, però si consiglia
sempre di rilevare un numero maggiore per verificare la bontà dell'elaborazione attraverso gli scarti
di georeferenziazione.
16
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
Thopos esegue il calcolo dei parametri di rototraslazione (matrici di rotazione) con algoritmi ai
minimi quadrati per garantire la massima precisione.
Terminata la selezione dei punti omologhi si conferma il tutto o con il tasto dx del mouse o con
l'opzione "fi" della barra strumenti inferiore.
Comparirà la finestra di georeferenziazione della nuvola con inserite le coordinate dei punti inseriti
e con le opzioni di elaborazione.
Lasciare attiva solo l'opzione "Scalatura isotropa" e poi premere il pulsante "Calcola".
Il programma calcolerà i parametri di rototraslazione spaziale (matrici di rotazione) e nella finestra
dei risultati della trasformazione mostrerà anche gli scarti sule singole coordinate.
Se gli scarti rientrano nella precisione da noi voluta (elaborazioni di questo tipo hanno precisioni
nell'ordine dei 8-12 cm max) passiamo alla georeferenziazione della nuvola premendo il pulsante
"Georeferenzia nuvola". Dopo una breve fase di calcolo la nuvola georeferenziata comparirà a
video.
Se alcuni punti presentassero scarti elevati è possibile escluderli dal calcolo escludendoli dalla lista
della finestra di georeferenziazione.
La nuvola georeferenziata sarà immediatamente salvata in formato Thopos.
Gestione delle nuvole di punti :
Per garantire un output grafico a video soddisfacente anche con nuvole di milioni di punti (20-25
milioni), Thopos utilizza una modalità automatica che in genere viene attivata di default in fase di
caricamento della nuvola, ma che è possibile modificare dalla finestra di proprietà della nuvola.
17
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
Per accedere alle proprietà della nuvola bisogna utilizzare il comando "Modelli 3D" -> "Nuvola di
punti" -> "Proprietà" e poi selezionare la nuvola dalla lista delle nuvole presenti nella lista
"Gestione progetto".
Le proprietà della nuvola si gestiscono dalla finestra seguente. Come detto, per un output grafico
ottimale, lasciare attiva l'opzione "Calcolo automatico" su "Dettaglio output grafico".
(proprietà nuvola di punti)
Dalla finestra di proprietà è possibile modificare anche layer, nome e trasparenza dei punti della
nuvola, nonché il nome del file di salvataggio.
18
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
Se interessa lavorare solamente all'interno di una determinata zona basterà individuare la zona
stessa con una polilinea chiusa e poi, attraverso il comando "Ritaglia", sarà possibile eliminare tutti
i punti della nuvola esterni alla polilinea tracciata.
Per eliminare una nuvola bisogna utilizzare il comando "Cancella" e successivamente selezionare
il nome della nuvola da cancellare dalla lista della "Gestione progetto".
Sarà anche possibile esportare la nuvola di punti nel formato STANFORD PLY per poterla poi
caricare su altri programmi come "MeshLab" e eseguire altre operazioni di modellazione 3D.
Per esportare una nuvola di punti bisogna utilizzare il comando "Esporta", selezionare il nome
della nuvola sulla lista "Gestione progetto" e poi selezionare il nome del file.
UTILIZZO DELLA NUVOLA NELLE OPERAZIONI TOPOGRAFICHE :
1) Disegno diretto sulle entità della nuvola:
Utilizzando lo snap ad oggetto su nuvola di punti sarà possibile utilizzare il CAD per disegnare
direttamente le entità che interessano (marciapiedi, carreggiate, confini, ecc...)
Tutti i punti selezionati all'interno della nuvola avranno una posizione 3D definita dalla nuvola
stessa.
2) Determinazione di nuovi punti senza dover recarsi in loco per un nuovo rilievo :
Sempre utilizzando lo snap su nuvola di punti sarà possibile determinare la posizione 3D di nuovi
punti topografici (pozzetti, spigoli, manufatti in genere, alberi, ecc...) e inserirli direttamente nella
grafica. Questi punti potranno poi essere collegati (inseriti) su un libretto delle misure e risultare
come rilevati direttamente in campagna.
Lo snap su punto nuvola viene indicato con un cerchietto e la scritta "Osnap su nuvola".
3) Utilizzo della nuvola per ottenere automaticamente il dato altimetrico :
Nelle operazioni di digitalizzazione a video (ad esempio delle immagini raster) in genere non si
conosce la quota delle entità che si disegnano (linee, polilinee, archi, ecc...) per cui il disegno
risultante risulterà solo 2D.
19
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
Attraverso la funzione di interpolazione della quota dei punti da nuvola inserita su Thopos 7 sarà
possibile digitalizzare qualsiasi entità ottenendo automaticamente anche la quota.
Per attivare l'interpolazione delle quota da nuvola sottostante bisogna andare nelle "Impostazioni
programma" (menu file) e nella scheda "Sistema" selezionare "Quota Z piano CAD da nuvola di
punti sottostante".
Con questa opzione attivata tutti i punti che andremo a "cliccare" sul CAD assumeranno la quota Z
derivante dalla nuvola di punti sottostante.
Se la presenza della nuvola crea problemi nella digitalizzazione (ad esempio di una mappa raster)
sarà possibile modificare la trasparenza dei punti della nuvola dalla finestra delle proprietà vista
prima.
20
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
Per avere conferma che la quota del punto è stata interpolata il programma, ad ogni click del
mouse, visualizza la scritta "Z da nuvola".
4) Estrapolazione del modello 3D del terreno :
Attraverso questa funzione il programma elabora un modello 3D a triangoli partendo dai punti della
nuvola.
Il modello sarà generato all'interno di una zona definita da una polilinea chiusa tracciata a priori,
quindi procedere come segue :
1) Attivare lo snap su nuvola di punti
2) Con il comando "Polilinea" tracciare una polilinea chiusa che delimiterà la zona di elaborazione
del modello 3D (DTM).
3) Creare un nuovo layer che conterrà il modello 3D da creare
4) Tracciare eventuali linee di discontinuità sempre con il comando polilinea e lo Snap su nuvola
attivato. Per una migliore riuscita del modello 3D è consigliabile tracciare polilinee di vincolo con la
lunghezza del singolo segmento simile alla lunghezza del lato dei triangoli del modello 3D.
5) Attivare il comando dalla scheda "Modelli 3D" -> "Nuvole di punti" -> "Crea DTM" e selezionare
la polilinea chiusa tracciata al punto 2.
6) Nella finestra che appare inserire il passo della griglia del DTM (passo proporzionale allo scopo
del DTM, all'ampiezza dell'area e alla precisione richiesta).
Minore sarà il passo maggiore sarà il tempo di elaborazione del DTM.
Inseriti i valori richiesti premere il pulsante "Elabora", dopo una fase di calcolo che può durare
anche parecchi minuti verrà mostrato a video il modello 3D.
Su questo modello si potranno eseguire tutte le operazioni che in genere si fanno sui DTM (curve
di livello, volumi, profili, sezioni, ecc...)
ESEMPI DI RILIEVO CON IL DRONE :
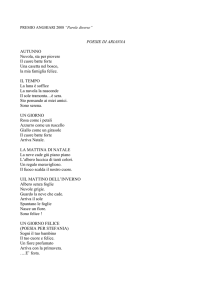
Esempio 1: Rilievo di un alveo di un fiume
21
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
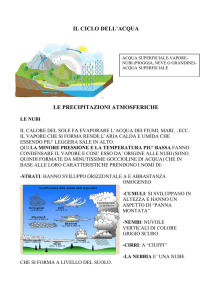
In questo esempio si è utilizzato un Drone "Semi-professionale" DJI Phantom 3 Advance, la quota
di volo si è attestata sui 40 mt e la velocità attorno ai 4 m/s.
Le foto scattate in modalità manuale sono state complessivamente 289 e sono state tutte utilizzate
per la costruzione della nuvola di punti.
I punti utilizzati per l'allineamento sono stati num. 16.699 e la nuvola di punti elaborata conta
complessivamente 16.059.958 punti.
La superficie rilevata ammonta a circa 81.000 mq.
La risoluzione della nuvola è di circa 7 cm.
Il rilievo di appoggio è stato eseguito con strumentazione GPS appoggiata alla rete regionale.
I punti di appoggio sono costituiti esclusivamente da targhet posizionati manualmente e visibili
dall'alto.
(Nuvola di punti dell'alveo del fiume "Cellina" visualizzata su Thopos 7)
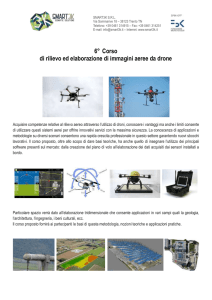
Esempio 2: Rilievo di una lottizzazione
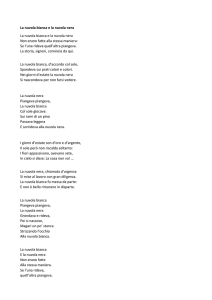
In questo esempio si è utilizzato un Drone "Semi-professionale" DJI Phantom 3 Advance, la quota
di volo si è attestata sui 40 mt e la velocità attorno ai 4-5 m/s.
Le foto scattate in modalità manuale sono state complessivamente 76 e sono state tutte utilizzate
per la costruzione della nuvola di punti.
I punti utilizzati per l'allineamento sono stati num. 14.615 e la nuvola di punti elaborata conta
complessivamente 10.426.764 punti.
La superficie rilevata ammonta a circa 44.000 mq.
La risoluzione della nuvola è di circa 7 cm.
Il rilievo di appoggio è stato eseguito con strumentazione GPS appoggiata alla rete regionale.
I punti di appoggio sono costituiti sia da targhet posizionati manualmente e visibili dall'alto e sia da
punti presenti in loco e facilmente individuabili dall'alto.
22
Utilizzo del drone per rilievi di piccole e medie dimensioni – Esempi pratici - © 2015 Fabio Guerra
(Nuvola di punti di una lottizzazione visualizzata su Thopos 7)
23