")
PRINCIPIO DEI LAVORI VIRTUALI (PLV)
1. PREMESSA
Il Principio dei lavori Virtuali, PLV, la cui enunciazione risale al XVII-XVIII secolo ad opera di
numerosi studiosi, tra i quali Cartesio, Bernoulli, Fourier e Lagrange, può essere visto come uno
strumento generale che esprime il legame fondamentale tra la condizione di congruenza, affrontata
nella parte della cinematica in termini di compatibilità degli spostamenti con l’ipotesi di corpo
rigido, e le condizioni di equilibrio, esaminate nella parte di statica tramite le equazioni cardinali
della statica.
Partendo dagli studi di Cartesio (1596-1650), questi, basandosi sul concetto di lavoro, evidenziò
come “Il lavoro necessario per elevare due pesi differenti a differenti altezze è lo stesso se è lo
stesso il prodotto del peso per l’altezza”, introducendo altresì, in seguito alla corrispondenza con
Padre Mersenne, il concetto di lavoro virtuale, ovvero precisando che “L’uguaglianza dei lavori
non ha luogo qualunque sia lo spostamento, grande o piccolo, che al meccanismo si imprime: essa
non sussiste in modo generale che per spostamenti infinitamente piccoli a partire dalla posizione di
equilibrio.”. Tale concetto venne poi ulteriormente ripreso e spiegato nello studio dello stesso
studioso relativamente al caso del peso vincolato a muoversi su una superfice curva.
Solo decenni più tardi vennero però ripresi gli studi di Cartesio e, in particolare, Giovanni Bernoulli
(1667-1748) enunciò il principio delle velocità virtuali, mentre Fourier fu il primo ad intuire l’utilità
del PLV nel caso di vincoli privi di attrito per i quali il lavoro virtuale è nullo. Fourier infatti,
espresse il PLV indicandolo come “Teorema dei Lavori Virtuali” nel seguente modo: “La
condizione necessaria e sufficiente per l’equilibrio di un sistema materiale soggetto a vincoli privi
di attrito, è che la somma dei lavori delle forze ad esso direttamente applicate, sia nulla per tutti i
sistemi di spostamenti virtuali rigidi, cioè piccolissimi e compatibili con i vincoli”.
Successivamente, Lagrange (1736-1813) presentò il PLV nella sua forma moderna, ovvero inteso
come “Condizione Necessaria e Sufficiente perché un sistema materiale sia in equilibrio, è che sia
nullo il lavoro virtuale delle forze attive associato a qualunque spostamento virtuale rigido
compatibile” intendendo il lavoro virtuale come il lavoro compiuto da un sistema di forze associato
a spostamenti virtuali. Ciò equivale a dire che, se si perturba infinitesimamente la condizione di
equilibrio di un sistema, le forze esterne applicate su di esso non compiono lavoro, il sistema non
muta il suo stato energetico e l’energia totale è in condizione di stazionarietà.
È dunque evidente come il PLV abbia una validità generale potendo essere applicato a corpi rigidi
(oggetto del presente corso), a corpi deformabili, a strutture staticamente determinate o
1
indeterminate, in presenza di non linearità di forze o spostamenti, in presenza di vincoli cedevoli, in
presenza di effetti legati alle dilatazioni termiche o a stati di tensioni residue
Infine, è interessante osservare come in letteratura siano presenti differenti nomenclature, ovvero
oltre a Principio dei Lavori Virtuali, altri autori preferiscono utilizzare Teorema dei Lavori Virtuali
ed altri ancora Equazione dei Lavori Virtuali. L’utilizzo di diverse nomenclature è da ricercarsi
nella natura astratta del termine virtuale, ovvero considerando un sistema di spostamenti virtuali (o
di forze virtuali) ovvero non reale, è forse difficile per alcuni di assegnargli il valore di Principio,
ovvero di legge fisica mai contraddetta dall’esperienza (definizione però non sempre condivisa da
tutti). Inoltre, potendo dimostrare il PLV a partire da considerazioni di equilibrio e di congruenza ed
applicando il teorema della divergenza, molti autori preferiscono utilizzare il termine Teorema.
L’utilizzo del termine equazione deriva infine semplicemente dal fatto che viene utilizzato quando
si risolve un problema della Meccanica.
2. IL PLV NEL CASO DI ATTI DI MOTO RIGIDO
Nell’ambito del corso di statica è stato più volte precisato che ci si occupa del caso particolare di
“corpi rigidi”, ovvero caratterizzati dalla peculiarità che ad una qualsiasi variazione della
configurazione di riferimento del corpo corrisponda una nuova configurazione (configurazione
variata) caratterizzata dall’invariabilità della distanza mutua tra una qualsiasi coppia di punti
costituenti il corpo. Inoltre, si fa specifico riferimento al solido trave, inteso come un solido
cilindrico con asse rettilineo contenuto nel piano di simmetria della sezione trasversale, e al caso di
moti rigidi piani, ovvero al modello di trave rigida piana ad asse rettilineo.
In tale ambito, si consideri una trave soggetta ad un sistema di forze generalizzate direttamente
applicate alla trave ( F a , denominate nel seguito forze attive), nonché alle forze reattive esercitate
dai vincoli F v . Assegnato alla trave un arbitrario atto di moto rigido infinitesimo e, soprattutto, non
legato né alle forze esterne né alle condizioni di vincolo (denominato appunto spostamento
virtuale), è possibile calcolare il lavoro compiuto da ogni forza attiva e reazione vincolare dovuto
allo spostamento subito dal corrispondente punto di applicazione della forza in seguito allo
spostamento virtuale (denominato lavoro virtuale). Il lavoro totale compito dalle forze attive Lv ,a è
somma dei lavori virtuali delle singole forze attive, mentre il lavoro totale compiuto dalle reazioni
vincolari Lv ,r è somma dei lavori virtuali delle singole reazioni vincolari:
𝑦𝑦
𝑦𝑦
𝑧𝑧 𝑧𝑧
𝐿𝐿𝑣𝑣,𝑎𝑎 = � 𝑭𝑭𝑎𝑎,𝑖𝑖 ∙ 𝒖𝒖𝑖𝑖 = ��𝐹𝐹𝑎𝑎,𝑖𝑖 𝑢𝑢𝑖𝑖 + 𝐹𝐹𝑎𝑎,𝑖𝑖
𝑢𝑢𝑖𝑖 �
𝑖𝑖
𝑖𝑖
2
𝑦𝑦
𝑦𝑦
𝑧𝑧 𝑧𝑧
𝐿𝐿𝑣𝑣,𝑟𝑟 = � 𝑭𝑭𝑟𝑟,𝑗𝑗 ∙ 𝒖𝒖𝑗𝑗 = ��𝐹𝐹𝑟𝑟,𝑗𝑗 𝑢𝑢𝑗𝑗 + 𝐹𝐹𝑟𝑟,𝑗𝑗
𝑢𝑢𝑗𝑗 �
𝑗𝑗
𝑗𝑗
Segue che, il lavoro virtuale totale è dato dalla somma del lavoro totale delle forze attive e dal
lavoro totale delle reazioni vincolari:
𝐿𝐿𝑣𝑣 = 𝐿𝐿𝑣𝑣,𝑎𝑎 + 𝐿𝐿𝑣𝑣,𝑟𝑟
È possibile dimostrare che la trave soggetta al sistema di forze attive e reazioni vincolari è in
equilibrio se il lavoro virtuale totale è nullo per qualsiasi atto di moto rigido:
𝐿𝐿𝑣𝑣 = 0
ovvero il Principio dei Lavori Virtuali per corpi rigidi.
Inoltre, si può osservare che, se gli spostamenti virtuali caratterizzanti l’atto di moto rigido imposto
alla trave sono compatibili con i vincoli (perfetti e lisci) della stessa, il lavoro virtuale delle reazioni
vincolari è nullo:
𝐿𝐿𝑣𝑣,𝑟𝑟 = 0
segue dunque che, in questo caso particolare, la trave soggetta al sistema di forze attive e reazioni
vincolari è in equilibrio se e solo se il lavoro virtuale totale delle forze attive è nullo per qualsiasi
atto di moto rigido compatibile con i vincoli:
𝐿𝐿𝑣𝑣,𝑎𝑎 = 0
È interessante osservare come nell’espressione del lavoro virtuale compaiano sia le forze esterne
(note) sia le reazioni vincolari (incognite).
Nel caso di strutture staticamente determinate, il PLV consente di scrivere tante equazioni
algebriche quante sono le reazioni vincolari, ciascuna delle quali caratterizzata dalla presenza di una
sola incognita. Infatti, imponendo alla trave un atto di moto che faccia compiere lavoro a una sola
reazione, si ottiene appunto un’equazione algebrica nella quale appare solo questa reazione come
incognita.
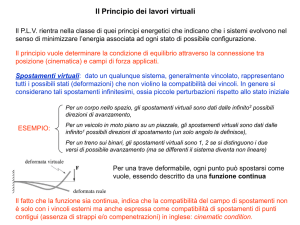
Ad esempio se si considera la trave isostatica di figura 1 e si ipotizza un cinematismo della stessa
che fa compiere lavoro alle forze esterne e alla sola reazione vincolare esplicata dal carrello in B, il
PLV si traduce nella seguente equazione:
𝐹𝐹 ∙ 𝛿𝛿𝐶𝐶 + 𝐹𝐹 ∙ 𝛿𝛿𝐷𝐷 + 𝑉𝑉𝐵𝐵 ∙ 𝛿𝛿𝐵𝐵 = 0
ovvero, considerando come parametro lagrangiano la rotazione θ, si ottiene:
𝐹𝐹 ∙ 𝐿𝐿 ∙ 𝜃𝜃 + 𝐹𝐹 ∙ 2𝐿𝐿 ∙ 𝜃𝜃 + 𝑉𝑉𝐵𝐵 ∙ 3𝐿𝐿 ∙ 𝜃𝜃 = 0
che implica appunto: 𝑉𝑉𝐵𝐵 = −𝐹𝐹
∀𝜃𝜃
3
Figura 1
Allo stesso modo, il PLV può essere utilizzato per valutare le reazioni vincolari andando ad
esempio a sopprimere soltanto il vincolo corrispondente alla reazione che si cerca e sostituendolo
con la reazione stessa. La struttura in questo modo diviene una volta labile, ammettendo dunque
cinematismi compatibili con i restanti vincoli e caratterizzati da un unico parametro lagrangiano.
Imponendo uno qualsiasi di tali cinematismi (arbitrarietà dell’atto di moto rigido imposto), le
uniche forze che compiono lavoro saranno le forze esterne e la reazione vincolare corrispondente al
vincolo semplice soppresso, che adesso viene vista come una forza esterna applicata alla struttura.
Utilizzando il PLV, ovvero uguagliando a zero il lavoro compiuto da questo nuovo sistema di forze
attive, 𝐿𝐿𝑣𝑣,𝑎𝑎 = 0, si ottiene un’equazione nella sola incognita reazione vincolare del vincolo
soppresso.
Infatti, riprendendo in esame la trave della figura 1, e volendo sempre determinare la reazione del
carrello in B, si può pensare di sopprimere il carrello in B sostituendolo con la corrispondente
reazione e rendendo la trave una volta labile (esistenza di un centro di rotazione assoluta
coincidente con A). Considerando proprio un cinematismo individuato dalla rotazione della trave
rigida attorno al centro di rotazione assoluta della trave ed annullando il lavoro delle forze esterne
(compresa la reazione vincolare del solo vincolo soppresso) agenti sul nuovo schema labile di trave,
si perviene alla stessa equazione di sopra e dunque allo stesso valore della reazione vincolare. La
comodità di sopprimere il vincolo e rendere la trave labile consente di individuare facilmente la
famiglia di cinematismi compatibili con i restanti vincoli e quindi di essere sicuri che le reazioni
vincolari esplicate da questi non compiano lavoro.
4
La dimostrazione del PLV per corpi rigidi discende direttamente dalle equazioni cardinali della
statica, che esprimono appunto una condizione di equilibrio del corpo:
𝑹𝑹 = � 𝑭𝑭𝒊𝒊 = 𝟎𝟎
𝑖𝑖
𝑴𝑴 = �(𝒙𝒙𝒊𝒊 − 𝒙𝒙𝑶𝑶 ) × 𝑭𝑭𝒊𝒊 + � 𝒎𝒎𝑖𝑖 = 𝟎𝟎
𝑖𝑖
𝑖𝑖
e dall’espressione di cinematismi compatibili ovvero congruenti con l’ipotesi di corpo rigido:
𝒖𝒖𝒊𝒊 = 𝒖𝒖𝑶𝑶 + 𝜽𝜽 × (𝒙𝒙𝒊𝒊 − 𝒙𝒙𝑶𝑶 )
dove 𝜽𝜽 = 𝜃𝜃𝒆𝒆, essendo θ l’ampiezza della rotazione subita dal corpo, ed e il versore normale al
piano dove avviene la rotazione.
Infatti, scrivendo l’espressione del lavoro virtuale compiuto dalle forze esterne e dalle reazioni
vincolari, si perviene alla seguente espressione:
𝐿𝐿𝑣𝑣 = � 𝑭𝑭𝒊𝒊 ∙ 𝒖𝒖𝑶𝑶 + � 𝑭𝑭𝒊𝒊 ∙ [𝜽𝜽 × (𝒙𝒙𝒊𝒊 − 𝒙𝒙𝑶𝑶 )] + � 𝑚𝑚𝑖𝑖 𝜃𝜃
𝑖𝑖
𝑖𝑖
𝑖𝑖
ovvero, utilizzando le proprietà del prodotto vettoriale, si ha:
𝐿𝐿𝑣𝑣 = � 𝑭𝑭𝒊𝒊 ∙ 𝒖𝒖𝑶𝑶 + ��(𝒙𝒙𝒊𝒊 − 𝒙𝒙𝑶𝑶 ) × 𝑭𝑭𝒊𝒊 ∙ 𝒆𝒆 + � 𝑚𝑚𝑖𝑖 � 𝜃𝜃
𝑖𝑖
𝑖𝑖
𝑖𝑖
che risulta essere nulla qualunque sia lo spostamento individuato dai parametri lagrangiani 𝒖𝒖𝑶𝑶 , 𝜃𝜃.
La peculiarità di maggiore rilievo del PLV nell’unire condizioni di “equilibrio” e condizioni di
“congruenza” consiste nel fatto che utilizzando ad esempio la condizione legata alla congruenza
degli spostamenti con l’ipotesi di corpi rigidi con la condizione di annullamento del lavoro virtuale,
espressa appunto dal PLV, si può pervenire alla condizione di equilibrio espressa dalle equazioni
cardinali della statica.
Infatti, partendo da:
𝒖𝒖𝒊𝒊 = 𝒖𝒖𝑶𝑶 + 𝜽𝜽 × (𝒙𝒙𝒊𝒊 − 𝒙𝒙𝑶𝑶 )
𝐿𝐿𝑣𝑣 = 0 ∀ 𝒖𝒖𝑶𝑶 , 𝜃𝜃
ed esplicitando l’espressione del lavoro virtuale, si ottiene:
𝐿𝐿𝑣𝑣 = � 𝑭𝑭𝒊𝒊 ∙ 𝒖𝒖𝑶𝑶 + 𝜃𝜃 ��(𝒙𝒙𝒊𝒊 − 𝒙𝒙𝑶𝑶 ) × 𝑭𝑭𝒊𝒊 ∙ 𝒆𝒆 + � 𝑚𝑚𝑖𝑖 � = 0,
𝑖𝑖
𝑖𝑖
𝑖𝑖
∀ 𝒖𝒖𝑶𝑶 , 𝜃𝜃
che, dovendo valere per ogni cinematismo arbitrario ma congruente con l’ipotesi di corpo rigido,
richiede appunto che siano soddisfatte le equazioni cardinali della statica:
5
𝑹𝑹 = � 𝑭𝑭𝒊𝒊 = 𝟎𝟎
𝑖𝑖
𝑴𝑴 = �(𝒙𝒙𝒊𝒊 − 𝒙𝒙𝑶𝑶 ) × 𝑭𝑭𝒊𝒊 + � 𝒎𝒎𝒊𝒊 = 𝟎𝟎
𝑖𝑖
𝑖𝑖
Allo stesso modo, unendo la condizione legata all’equilibrio, ovvero le equazioni cardinali della
statica, con la condizione di annullamento del lavoro virtuale, espressa appunto dal PLV, si
perviene all’espressione di spostamenti congruenti con l’ipotesi di corpo rigido.
Infatti, partendo da:
𝑹𝑹 = � 𝑭𝑭𝒊𝒊 = 𝟎𝟎
𝑖𝑖
𝑴𝑴 = �(𝒙𝒙𝑷𝑷 − 𝒙𝒙𝑶𝑶 ) × 𝑭𝑭𝒊𝒊 + � 𝒎𝒎𝒊𝒊 = 𝟎𝟎
𝑖𝑖
𝐿𝐿𝑣𝑣 = 0 ∀ 𝒖𝒖𝑶𝑶 , 𝜃𝜃
𝑖𝑖
e sviluppando sempre l’espressione del lavoro virtuale, dove la risultante delle forze compirà lavoro
per il generico spostamento 𝒖𝒖𝑶𝑶 subito dal corpo, mentre la risultante dei momenti compirà lavoro
per la generica rotazione θ del corpo, si ottiene:
𝐿𝐿𝑣𝑣 = 𝑹𝑹 ∙ 𝒖𝒖𝑶𝑶 + 𝑴𝑴 ∙ 𝜽𝜽 = 0,
ovvero:
dalla quale:
∀ 𝒖𝒖𝑶𝑶 , 𝜃𝜃
𝐿𝐿𝑣𝑣 = � 𝑭𝑭𝒊𝒊 ∙ 𝒖𝒖𝑶𝑶 + ��(𝒙𝒙𝒊𝒊 − 𝒙𝒙𝑶𝑶 ) × 𝑭𝑭𝒊𝒊 ∙ 𝒆𝒆 + � 𝑚𝑚𝑖𝑖 � 𝜃𝜃 = 0
𝑖𝑖
𝑖𝑖
𝑖𝑖
𝐿𝐿𝑣𝑣 = � 𝑭𝑭𝒊𝒊 ∙ [𝒖𝒖𝑶𝑶 + 𝜽𝜽 × (𝒙𝒙𝒊𝒊 − 𝒙𝒙𝑶𝑶 )] + � 𝑚𝑚𝑖𝑖 𝜃𝜃 = 0
𝑖𝑖
𝑖𝑖
In questa espressione si riconosce come il lavoro compiuto dalla forza generica Fi sia proprio legato
allo spostamento 𝒖𝒖𝒊𝒊 = 𝒖𝒖𝑶𝑶 + 𝜽𝜽 × (𝒙𝒙𝒊𝒊 − 𝒙𝒙𝑶𝑶 ) che rispetta appunto la compatibilità (congruenza) con
l’ipotesi di corpi rigidi, alla quale si voleva pervenire.
6
")