MEDICINA NUCLEARE
Lezione 16/05/2005
Ci occupiamo ora della strumentazione che consente di ricavare informazioni 3-D tomoscintigrafiche; tomo da fetta e scintigrafiche derivante dall’utilizzo di cristalli scintillatori per
la rilevazione delle radiazioni.
Le tecniche tomografiche sono fondamentalmente 2:
La SPECT : tomografia ad emissione di singolo fotone γ
E la PET:che si distingue dalla precedente tecnica per il fatto che l’evento che viene
rilevato è l’emissione di positroni, che a loro volta provocano l’emissione di 2 fotoni γ.
Quindi per la prima tecnica, per ogni evento ho un singolo fotone γ, a differenza della
seconda dove ho una coppia antiparallela.
Entrambe le tecniche consentono di ricavare immagini 3-D di una certa regione di
interesse.
La metodologia di estrazione di tali immagini è totalmente differente da quello alla base
delle immagini TAC, infatti qui la sorgente di radiazioni è il soggetto stesso.
In realtà si fa un campionamento delle radiazioni emesse dall’organo facendo assumere
alla testata (singola o multipla) diverse posizioni attorno alle regione di interesse.
Una seconda differenza è che la testata (ovvero il rivelatore)in questo caso, è essa stessa
una matrice di rivelatori e quindi un oggetto 2-D, ed è quindi necessario selezionare il
contributo della sezione di interesse evitando quello degli altri piani.
I vantaggi offerta da tali tecniche di indagine sono pressoché simili a quelli offerti dalla
TAC:
1. miglioramento della localizzazione spaziale
2. capacità di separare gli organi
3. possibilità di descrivere quantitativamente il fenomeno
studiato.
SPECT
Nell’indagine Spect si utilizza una γ-camera e radionuclidi che emettono fotoni γ, si ha
quindi una forte somiglianza con le immagini scintigrafiche planari.La testata è in grado di
ruotare di 360° attorno al lettino e quindi al corpo del paziente, sorgente delle radiazioni.
Ciò permette la ricostruzione tridimensionale della distribuzione spaziale del farmaco.
La testata è costituita da una matrice di sensori, e quindi per ogni proiezione ho diverse
sezioni, in altre parole ho una immagine 2-D per ogni acquisizione .
Posso poi isolare un piano selezionando una riga della matrice, ricostruendo in tal modola
mappe di emissioni delle radiazioni.
In alcuni macchine è possibile avere una doppia testata, così da permettere tempi più
rapidi di acquisizione e di conseguenza un aumento dell’efficienza.
In figura ho 2 esempi, dai quali si nota come l’utilizzo di due testate poste in diverse
posizioni l’una rispetto all’altra, mi permetta di raccogliere i fotoni che escono da 2 angoli
solidi diversi.
In entrambi i casi aumento il numero totale di fotoni rilevati, e cio’, visto il basso numero di
fotoni che concorrono alla generazione di immagini in medicina nucleare, è di
fondamentale importanza per aumentare la qualità delle immagini.
I traccianti utilizzati nella SPECT sono:
• Iodio :
123I ha emivita di 13 ore ed emissione a 159 keV
123I-IMP (isopropylioamphetamina); studi rCBF , monitoraggio flusso sanguigno nel
tempo, nella regione cerebrale
• Tecnezio:
99mTc ha emivita di 6 ore ed emissione a 140 keV
99mTc-HMPAO (esametil-propilen-aminoxina o esametazina)
99mTc-ECD
• Tallio:
201Tl ha emivita di 72.5 ore ed emissione a 167 keV
• Xenon:
133Xe ha emivita di 151 ore ed emissione a 80 keV (difficoltà a generare
buone immagini); in studi rCBF.
Bisogna notare come quasi tutte le apparecchiature siano ottimizzate per bande di
energie vicine ai 140-150 keV, e quindi, tale tracciante non è molto utilizzato, anche
per l’elevato tempo di dimezzamento.
L’acquisizione viene eseguita mediante una rotazione di 360° gradi della testa, e il numero
di posizioni che assume è solitamente uguale al numero di sensori della matrice (64 o 128
pixel) generalmente 64 o 128.
Quindi il passo con cui viene mossa la testata è ,per esempio, 360/64=5,6°.
Si possono distinguere 2 tipi di campionamento:
C’è un campionamento angolare: ovvero campionare spostandosi sull’angolo; in ogni
posizione è acquisita una matrice di dati (es. 128x128) detta proiezione.
Ed uno lineare, dove identifico una riga della matrice come il profilo di radioattività.
Il principio è analogo alla Tac che però misura l’attenuazione subita dalle radiazioni nel
passaggio attraverso i tessuti.
Il singolo valore del sensore è quindi l’integrale di linea dell’attività, dove la linea in
questione, è la congiungente tra sorgente e rivelatore.
Questo ovviamente se si assume di trascurare l’attenuazione, i fotoni gamma infatti, dalla
sorgente viaggiano attraverso un mezzo attenuante, e quindi per misurare ll’intensità della
sorgente dovrei, in realtà, tener conto anche dell’attenuazione.
Idealmente basterebbe una scansione a 180°, per una ricostruzione fedele della
distribuzione spaziale della sorgenete, dal momento che le sezioni viste da posizioni
diametralmente opposte dovrebbero essere uguali.
Ma la gamma camera non è un sistema di imaging perfetto e le viste opposte non sono
perfettamente uguali.
Nella figura si nota facilmente come la sorgente può emettere fotoni γ, che seguono
percorsi diversi, a seconda della direzione, e sono quindi attenuati in maniera diversa.
La conseguenza di ciò è che gli artefatti da cui è afflitta una certa vista sono diversi da
quelli che concorrono alla vista diametralmente opposta, e quindi la risoluzione delle 2
viste non è la stessa, ed è proprio per ridurre tali artefatti che si ricorre ad una rotazione
della testata di 360°. Una eccezione è rappresentata dall’ imaging del miocardio ,dal
momento che il cuore è una struttura fortemente asimmetrica ed è circondato da vari
tessuti che assorbono in modo diverso, e inoltre bisogna tener conto anche della
respirazione. Una indagine a 360° potrebbe quindi portare ad un aumento del disturbo.
In ultima analisi quindi:
– la risoluzione degrada con l’aumento della distanza tra l’oggetto e la camera
– una percentuale di fotoni di scatter viene comunque accettata (risoluzione
in E ≈ 10%).Si cerca infatti di fare delle finestre di energia e di accettare solo i fotoni
all’interno di una certa banda di energia.Questa tecnica infatti permette di ridurre i
fotoni di scatter accettati,dal momento che questi subiscono una diminuzione
dell’energia.
– una certa frazione di fotoni è attenuata nell’attraversamento di un mezzo
attenuante (paziente)
2 sono inoltre le modalità di acquisizione dell’immagine
– step and shoot:
alternanza di rotazione verso la vista seguente (step) e acquisizione di una
proiezione a camera ferma (shoot).
Quindi in breve mi muovo raggiungo la posizione acquisisco i dati
I problemi che si incontrano in tale metodologia di acquisizione sono i secondi di
possibile ritardotra l’acquisizione di viste successive e il fatto che durante lo
spostamento della testata non acquisisco e di conseguenza ho tempi morti. Alcuni
fenomeni dinamici, di una certa rapidità, li perdo.
– continua:
Gli eventi sono acquisiti durante tutta le rotazione della camera. Le rotazioni, infatti,
sono molto lente e quindi continuo ad acquisire.
E’ possibile che la proiezione che acquisisco da questi dati sia soggetta a
sfuocamento, per effetto proprio di un trascinamento dei dati.
Le matrici di sensori che vengono impiegate in tali strumenti sono legate a diverse
considerazioni, qui di seguito illustrate
Definiamo innanzitutto la FOV (campo di vista) come la regione che vogliamo acquisire
Le matrici utilizzate sono di piccola dimensioni, tipicamente 64X64 o 128X128, soprattutto
se paragonate a quelle utilizzate in imaging radiologico.
Idealmente le dimensioni dei pixel devono essere minori di FWHM/3.
Supponiamo di avere una sorgente puntiforme e di rivelarla mediante un rivelatore lineare.
Il risultato è riportato in figura:
Nel caso reale si osserva uno “spanciamento della sorgente”e si definisce la PSF :Point
Spread Function (funzione di apertura di un punto) (fenomeno simile a quello che
provoca l’aberrazione ottica)
Se si vuole passare alle 2 dimensioni si utilizza la LPF (linear spread function), penso
allora di avere non una sorgente puntiforme, ma una linea di materiale radioattivo
Figura
La FWHM viene adottata anche come indice di risoluzione dello strumento: tanto più
ampia è, tanto peggiore è la risoluzione spaziale dell’immagine che si ottiene.Infatti se
penso a due punti vicini tra loro,quanto più si spande la loro immagine, minore sarà la
capacità di distinguerli l’uno dall’altro, ed è proprio per tale motivo che idealmente voglio
che la curva di PSF sia più stretta possibile.
Quello che abbiamo visto è in conclusione che la dimensione dei pixel deve essere
comparabile con la FWHM, questo perché se ho pixel di dimensioni maggiori andrò
incontro ad una degradazione dell’immagine, d’altra parte se ho pixel molto più piccoli non
ho vantaggi a causa di questa dispersione/sfuocamento.
Possiamo poi decidere il numero e la dimensione dei pixel in base alla FOV.
Il formato dei pixel (D):
D=FOV/(Zxn)
Dove Z è il fattore di zoom durante l’acquisizione, e n è il numero di pixel
Esempio:
FOV=40 cm, Z=1, FWHM=10mm (FWHM/3=3.33)
n=64 D=6.25mm (>3.33mm degrado immagine)
n=128 D=3.125 mm (≈ 3.3 mm ok)
Quello che si evince da tale esempio è che con 64 pixel , il singolo pixel è troppo grande e
non sfrutto la risoluzione che mi permetterebbe la macchina, mentre nel secondo caso
con l’utilizzo di 128 pixel ho un buon compromesso tra la risoluzione permessa dallo
strumento e le risoluzione connessa alle dimensioni della matrice di sensori.
Un altro aspetto molto importante è l’arco con cui ruota la testata, ovvero il numero di
proiezioni che acquisisco.
Il numero di viste angolari dovrebbe essere almeno pari al formato della matrice. Se in un
caso pratico usassi un numero di viste minori potrei generare artefatti legati all’algoritmo di
ricostruzione (ho sottocampionato).
Con un numero adeguato di proiezioni, invece, l’algoritmo è in grado di ricostruire in modo
fedele l’immagine.
La strumentazione SPECT può essere utilizzata seguendo diversi protocolli di
acquisizione a seconda dell’esame e della regione in analisi.
Imaging planare
Può essere utilizzata come se fosse una semplice γ camera senza funzionalità
SPECT, tenendo la testata ferma, e quindi acquisendo i dati da una sola
angolatura.
Posso farlo in maniera statica oppure dinamica
Imaging planare dinamico
Tale tecnica mi permette di seguire un evento che evolve nel tempo come il
movimento di un radiotracciante attraverso il corpo
Imaging SPECT
Tecnica già esposta e che consiste nell’acquisizione di verso proiezioni mediante la
rotazione della testata
Gated SPECT
Estrazione da SPECT di sotto-viste sincronizzate con un evento.
Un esempio è la sincronizzazione con l’ECG, dove le immagini utilizzate per la
ricostruzione sono solo quelle che corrispondono ad uno stesso punto dell’ECG,
dove in via approssimativa si può considerare che il cuore assuma la stessa
posizione
Imaging based SPECT
Nel caso precedente avevo eliminato il tempo, qui ho la generazione di una serie di
immagini 3-D dinamiche.
Per fare ciò vengono utilizzati sistemi a testata multipla (fino a 6), al fine di
velocizzare le acquisizioni.
La risoluzione SPECT dipende da:
- dimensioni del sinogramma (n° campioni angolari x n° campioni lineari)
- parametri di ricostruzione tomografica
- collimatore:
1. reale fattore limitante la risoluzione spaziale e l’efficienza di rivelazione
2. il più utilizzato è il “parallel hole” (buon compromesso tra risoluzione
spaziale ed efficienza di rivelazione)
3. i collimatori "fan beam", "cone beam" e multifocali privilegiano la
risoluzione a scapito dell’efficienza di detezione.
Valori tipici:
– Tl: 16-18 mm
– Tc: 12-13 mm
Questi valori sono molto alti, il che sta a significare una bassa risoluzione, dovuta
principalmente al basso numero di fotoni che concorrono alla generazione dell’immagine,
ed è per tale motivo che le immagini così ottenute non danno informazioni di tipo
anatomico.
PET/ tomografia ad emissione di positroni
Vengono utilizzati radiofarmaci in grado di emettere positroni che dopo un brevissimo
percorso incontrano un elettrone e si ha l’annichilazione con la conseguente generazione
di una coppia di fotoni gamma collineari da 511 keV.
La strumentazione deve essere tale da rilevare tali fotoni e risalire alla posizione dove è
avvenuta tale annichilazione.
Si fa poi l’approssimazione che tale posizione coincida con il punto di emissione dei
positroni, anche se in realtà è stato sottolineato come questi percorrano una brevissima
distanza.
I traccianti utilizzati nella PET sono caratterizzati da una breve emivita, e proprio per
questo motivo:
- produzione in loco con ciclotrone
- adeguati per processi veloci, infatti se il processo fosse molto lento, il decadimento
radioattivo sarebbe molto più veloce
- esposizione paziente non elevata
L’altro aspetto molto importante sono i traccianti fisiologici che a differenza degli analoghi
utilizzati nella SPECT, sono molecole direttamente coinvolte nel processo
biochimico/metabolico.
L’indagine PET viene utilizzata anche per studi di tipo fisiologico, ad esempio per
l’indagine sulle svariate funzioni a cui sono adibite le diverse regioni del cervello.
Un altro aspetto è quello di consentire di diagnosticare alcune patologie,come l’alzaimer ,
per esempio valutando la riduzione di perfusione di determinate regioni del cervello.
Una importante applicazione è l’utilizzo in parallo di indagine TAC e PET, alcune patologie
infatti non presentano dei danni anatomici, mentre una indagine PET può rivelare danni di
tipo funzionale, e quindi individuare un malfunzionamento ,prima che quest’ultimo porti a
un danno anatomico.
Per utilizzare una indagine PET devo disporre di un modello matematico che descriva la
cinetica dei farmaci.
Le immagini tomografiche saranno quindi dei dati da inserire nel modello,indispensabile
per trarre delle informazioni di carattere metabolico.
I traccianti utilizzati nella PET, sono tutti materiali che rientrano nella struttura della materia
con un tempo di decadimento molto breve.
• Ossigeno: 15O ha emivita 2.1 min, acqua-[15O] per consumo O nel miocardio.
• Azoto: 13N ha emivita 10 min, ammoniaca-[13N] per flusso sanguigno miocardio.
• Carbonio: 11C ha emivita 20.4 min, carfentanile-[11C] e cocaina-[11C] per
distribuzione e farmacocinetica
Droghe; acetato-[11C] per metabolismo ossidativi; metionina-[11C] e leucina-[11C]
per vitalità tumore.
• Fluoro: 18F ha emivita 109 min; ione fluoro [18F-] per patologie dello scheletro;
fluorodeossiglucosio FDG-[18F] per metabolismo glucosio in neurologia,
cardiologia, oncologia.
• Rubidio: 82Rb ha emivita 1.25 min; ione rubidio [82Rb-] per perfusione miocardica
Affrontiamo ora il problema del rivelamento, ovvero di come effettuo le misure nella PET.
La strumentazione utilizzata è quella di una γ-camera distribuita, dove il rilevatore è
costituito da una serie di cristalli scintillatori, separati da setti di piombo e tungsteno, su
anelli coassiali (tipo TAC di quarta generazione).
Vengono utilizzati più anelli.
La rivelazione si basa sull’annichilazione dei positroni che generano una coppia di fotoni
collineari (ovvero a 180° l’uno rispetto all’altro), e ogni rivelatore che registra un fotone
incidente genera un impulso temporizzato, ed in seguito si ha l’analisi di coincidenza di
eventi, per la ricostruzione della linea dove è avvenuto il fenomeno dell’annichilazione
(LOR).
Il rivelatore di coincidenza non è altro che una finestra temporale che permette di
discriminare gli eventi che concorrono alla generazione di una LOR da quelli tra loro
incorrelati, valutando se gli impulsi generati da due rivelatori stanno all’interno di tale
finestra temporale o meno.
Se ciò avviene allora posso pensare che i fotoni rilevati dai rivelatori siano stati generati
dallo stesso fenomeno di annichilazione e la congiungente dei 2 rivelatori mi identifica la
linea sulla quale,in qualche punto, è avvenuto il fenomeno,ovvero la sorgente.
Una fondamentale differenza strumentale tra SPECT e PET è, quindi, che non viene
utilizzato un collimatore fisico (come nella SPECT) ma si ha una collimazione (cioè la
determinazione della linea su cui stà la sorgente LOR) elettronica mediante lo schema
delle coincidenze.
Ciò mi permette di raggiungere una maggiore sensiblità, 10 volte superiore a quella della
SPECT (nel senso di numero di fotoni raccolti, infatti non ho più dei collimatori fisici che
impediscono a determinati fotoni di arrivare ai rivelatori degradando la qualità
dell’immagine).
Ed ho anche una miglior risoluzione spaziale: 5 mm (vs. 12 mm)
Questa dovuta alla maggiore uniformità spaziale della PSRF (misura accuratezza
spaziale)
Quindi la FWHM della PSRF varia da una larghezza di rivelatore al limite ai bordi del FOV
a circa mezza larghezza di rivelatore al centro del FOV.
In ultima analisi l’accuratezza della localizzazione dipende da:
– spessore finito dei cristalli scintillatori utilizzati per la rivelazione (incide sul
numero di fotoni che riesco a rilevare)
– energia d’emissione di positroni (dipende dall’isotopo usato)
– non tutti i fotoni sono emessi esattamente a 180°. Questo infatti è un risultato
statistico, può succedere a volte che i fotoni generati non siano esattamente
collineari, ma che ci siano delle leggere deviazioni angolari, che possono far si che i
rivelatori che registrano l’evento siano leggermente spostati l’uno rispetto all’altro,
generando di conseguenza delle imperfezioni nella ricostruzione della LOR.
I tipi di coincidenze che si possono realizzare sono fondamentalmente 4:
1. coincidenze effettive: entrambi i fotoni provenienti da un evento di annichilazione
vengono rilevati contemporaneamente dai rivelatori; nessuna interazione dei fotoni
prima della rilevazione (caso ideale).
2. coincidenze disperse (scattered): almeno uno dei fotoni rilevati è stato sottoposto
ad almeno un evento di scatter Compton prima della rilevazione. La LOR è
chiaramente diversa da quella vera che avrei dovuto ricostruire.
3. coincidenze random (accidentali): due fotoni, che vengono rilevati
contemporaneamente, non provenienti dalla stessa annichilazione sono incidenti
sul rivelatore nella stessa finestra temporale di coincidenza del sistema
4. coincidenze multiple: più di due fotoni vengono rilevati in differenti rivelatori ma
all’interno della stessa finestra temporale di risoluzione (evento rifiutato).
Abbiamo già detto come i rilevatori siano caratterizzati da diversi anelli su piani paralleli,
tale architettura mi permette diverse modalità di acquisizione:
2-D:
Utilizzo setti di piombo o tungsteno, con funzione di collimatore (ovvero bloccano fotoni
con angoli troppo pronunciati),che sporgono,interposti tra i P pannelli.
Le coincidenze vengono poi registrate solo tra i rivelatori nello stesso anello o in anelli
vicini.
Faccio una operazione di rebinning (bin sta per contenitore, quindi una operazione di
distribuzione dei fotoni nei diversi contenitori), operazione che conduco anche a livello
software.
2 sono i tipi di rebinning:
- a piano diretto:
Ovvero sommo dati di LOR su anelli con differenze di anello 0 e ± 2
Non prendo le coincidenze su tutti gli anelli ma solo quelle che avvengono
sullo stesso anello o su anelli che non differenziano di ± 2 anelli.
– rebinning a piano trasversale (P-1 piani)
Utilizzo somma dati di LOR su anelli con differenze di anello ± 1 e ± 3.
Seleziono l’informazione su di un certo piano.
Se ho quindi per esempio un rivelatore con 8 anelli di cristallo, abbiamo 8 piuani diretti e 7
trasversi, per un totale di 15 piani che si ricostruiscono con tale tecnica.
3D:
Qui i setti sono rimossi, e non vi è quindi più suddivisione in piani. Le coincidenze vengono
registrate tra rivelatori situati in qualsiasi combinazione d’anelli. (ovvero vengono registrate
coincidenze su qualsiasi LOR)
Procediamo ora con il confronto tra le due modalità di ricostruzione 2-D e 3-D.
1. in 2-D i setti applicano effetto ombra, perché ci sono alcuni fotoni assorbiti dai setti.
Si ha così una riduzione di efficienza anche del 50%.
2. in 3-D abbiamo un numero maggiore di LOR misurati
3. 3-D aumenta la sensibilità di registrare eventi di coincidenza vera. Esempio:se ho
16 anelli (quindi 16 piani diretti e 15 trasversi), vedo che man mano che mi sposto
verso la parte centrale dei piani, la sensibilità nel 3-D aumenta mentre la
ricostruzione 2-D è insensibile a tale variazione.
4. In 3D ho rivelazione dei fotoni di scatter con un range di angoli di deviazione
maggiore aumento della
sensibilità ad eventi di scatter.
5. In 3D c’è un aumento del FOV (Field of View) per eventi singoli aumento della
sensibilità ad eventi random.
Le qualità di uno scintillatore usato in PET sono:
– valore elevato di Z effettivo aumento sensibilità
– generazione di un n° elevato di fotoni di scintillazione per fotone gamma incidente
– basso fattore d’auto-assorbimento della luce di scintillazione
– indice di rifrazione vicino a quello del vetro per ottimizzare il gioco ottico tra
scintillatore e PMT
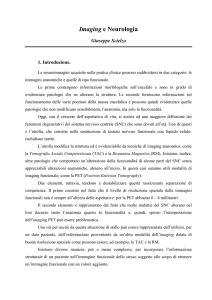
Abbiamo quindi un FWHM non solo in termini spaziali ma anche di energia. Sia infatti
riportato in figura la distribuzione di energia misurata con un tipico sistema di rivelazione di
scintillazione esposto a fotoni di 511 keV.
Si nota immediatamente come il picco sia a 511 keV, ma come si ricevano fotoni anche ad
energia diversa.
L’intervallo di energie evidenziato in figura mi determina la risoluzione in energia del
sistema.
La fase di Processing di impulso, riguarda l’analisi di un impulso elettrico generato da
PMT, utilizzato per generare un segnale di temporizzazione, attraverso un CFD (Constant
Fraction Discriminator).
Gli impulsi passano anche attraverso un discriminatore differenziale,che ha lo scopo di
eliminare impulsi elettrici con energie fuori dalla finestra di osservazione.
Tale discriminatore differenziale ha due moduli:
• LLD (Lower Level Discriminator)
filtro per eliminare scattering (un valore di LLD elevato provoca il rifiuto di un numero
consistente di eventi veri)
• ULD (Upper Level Discriminator)
utilizzato per rifiutare alcuni eventi nel caso in cui più di un fotone risulti incidente sul block
detector nello stesso periodo.
I segnali di temporizzazione vengono passati ai circuiti di coincidenza per il processing,
successivamente il Gate generator crea un impulso elettronico di durata τ (coincidence
resolving time).
L’unità logica crea un impulso di conteggio in presenza contemporanea di un segnale in
entrambi i suoi input in intervallo con differenza temporale ≤ τ, valutando quindi la distanza
tra i 2 picchi temporali.
Il dead time è il tempo morto legato al fatto che 2 eventi sono troppo vicini tra loro. Il
decadimento nucleare infatti, è un processo random e questo comporta una certa
probabilità che alcuni eventi si verifichino in tempi troppo ravvicinato da poter essere
distinti: perdite da dead time.
In altre parole è la minima distanza temporale che 2 eventi possono avere, per essere
rilevati, altrimenti uno lo perdo.
Il Block detector, rappresentato in figura, mostra come è fatto il singolo rilevatore
Dietro il cristallo scintillatore ho 4 fotomoltiplicatori (PMT) disposti su di un quadrato.
Analizzando l’intensità rilevata da ciascun PMT è possibile ricostruire la posizione in cui è
arrivato il fotone, dal momento in cui l’intensità è inversamente proporzionale alla distanza
del punto di scintillazione dal PMT.
Tale soluzione mi permette di raggiungere una risoluzione spaziale anche più piccoladel
singolo cristallo scintillatore.
E’ necessario infine analizzare i criteri adottati per la correzione del segnale, in modo tale
da aumentare il rapporto segnale rumore.
E’ necessario innanzitutto sottrarre una stima delle coincidenze random, dai dati misurati
in ogni LOR
Il valore delle coincidenze random in un determinato LOR è:
Rij 2ri r j
Rij = tasso di coincidenza random nel LOR definito dai canali i e j
ri = count rate sul canale i-esimo
rj = count rate su canale j-esimo
= tempo di risoluzione della coincidenza
La correzione per coincidenze di scatter, è leggermente più complicata della precedente.
Notiamo subito come in 2D è minore e spesso viene trascurata, mentre nel 3-D si utilizza
una tecnica detta "Gaussian fit ", dove analogamente a prima faccio un modello dello
scatter per sottrarlo alla misura effettuata.
Tali algoritmi di correzione basati su modelli utilizzano la mappa d’attenuazione ottenuta
da una scansione di trasmissione, i dati d’emissione, un modello della geometria dello
scanner e dei sistemi di rivelazione per calculare la percentuale di fotoni di scatter che
cadono su ogni rivelatore (formula di Klein-Nishima).
Costruisco quindi un fantoccio di plexiglas, all’interno del quale posiziono una sorgente di
positroni e vado a misurare il numero di fotoni che subiscono il fenomeno dello scatter.
La correzione di effetti dovuti al fatto che l’efficienza di rivelazione è variabile per ogni LOR
(normalizzazione del rivelatore), è legata quindi al rilevatore ma anche alla geometria
sistema (PMT e cristalli non tutti identici).
Quello che si fa è una riduzione del problema modellando NC (normalization coefficient)
come prodotto di fattori geometrici (noti) e dipendenti dal rivelatore; Tutte le possibili linee
che collegano tutti i rivelatori sono 1.25 milioni (di LOR). Se dovessi calcolare un fattore di
correzione per ognuna di esse impiegherei un tempo troppo lungo, quindi la dipendenza
dalla geometria del sistema viene modellizzata, lasciando alla stima con un fantoccio le
diversità legate ai rivelatori che sono 8192 (molto meno) (es. ECAT 951R).
Per quanto riguarda la risoluzione, in applicazioni cliniche deve essere sempre bilanciata
con livello di rumore nell’immagine e patient throughput . Si ottiene una risoluzione finale
di 8-10 mm.
I tipi di risoluzione sono:
intrinseca
di singole coppie di rivelatori: FWHM del rivelatore dalla LSF
(Line Spread Function).
d’immagine
campionamento, processo di ricostruzione, etc.
assiale o di spessore
dei rivelatori per sorgente che si muove “verticalmente”
modulation transfer function (MTF)
esprime la LSF in frequenza (modulo della sua FT).
Esempi di rilevatori sono di seguito riportati:
Per aumentare le linee di vista, di conseguenza il campionamento spaziale e quindi la
risoluzione, alcuni tipi di rilevatori possono compiere dei piccoli movimenti.
Vantaggi e svantaggi della metodica
• Vantaggi:
– consente di ottenere immagini dell’attività funzionale con una buona risoluzione
– consente misure in vivo di qualsiasi molecola per la quale sia disponibile un
radiofarmaco
– è in grado di localizzare e misurare la distribuzione di neurorecettori rilevando la
concentrazione di farmaci
marcati
• Svantaggi:
– costosa
– richiede la presenza di un ciclotrone in loco
• Strumento TAC/PET unificato.