Azionamenti per Automazione Ind. –cap. XXIV Trasduttori
A.A.2008-2009
1
24 - Sensori e Trasduttori
1
2
Sensori di corrente ad effetto Hall ...............................................................................................2
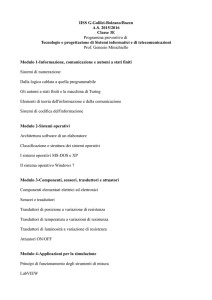
Trasduttori di posizione e di velocità...........................................................................................3
2.1
Resolver. ..............................................................................................................................3
2.2
Encoder incrementale...........................................................................................................5
2.3
Encoder assoluto ..................................................................................................................6
3
Torsiometri...................................................................................................................................9
4
Disturbi nelle misure (Saltare) ...................................................................................................10
Azionamenti per Automazione Ind. –cap. XXIV Trasduttori
A.A.2008-2009
2
1 Sensori di corrente ad effetto Hall
In questo paragrafo si vuole dare una descrizione in linea generale dei sensori e trasduttori di
grandezze, quali ad esempio corrente e posizione. La classe di sensori di corrente che si prenderà in
esame è quella che sfrutta l’effetto Hall. Questo tipo di sensori rappresenta la soluzione
maggiormente adottata per le misure di corrente (alternata o continua), che richiedano una
separazione elettrica (isolamento) dal sistema di misura, essi si dividono in sensori ad effetto Hall
ad anello aperto e ad anello chiuso.
In questi sensori, un conduttore percorso da corrente, posto all’interno dell’apertura del nucleo
magnetico della sonda, produce un campo magnetico proporzionale alla corrente nel conduttore; il
campo magnetico si concentra all’interno del nucleo e investe il sensore di Hall, posto nel tra ferro
del nucleo. Ai capi della sonda nascerà una tensione, proporzionale al flusso e, quindi, alla corrente
che scorre nel conduttore; la tensione così ottenuta è bassa, di conseguenza essa viene
opportunamente amplificata e resa disponibile ai terminali di uscita. Poiché linearità e deriva
termica dei componenti sono limitate, le sonde vanno scelte per le caratteristiche di buona stabilità
alle temperature di esercizio e di saturazione.
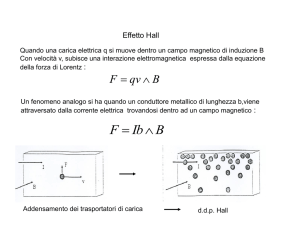
La famiglia di sensori ad effetto Hall appena descritta è quella ad anello aperto (figura 24.1); esse
sono caratterizzate da bassi consumi di potenza e basso costo d’acquisto.
Fig. 24.1 – Schema circuitale di una sonda di Hall ad anello aperto
Nei sensori Hall ad anello chiuso è previsto un ramo di controreazione per migliorarne le
prestazioni. La logica del circuito è analoga a quella dell’amplificatore operazionale: invece che
forzare a zero la tensione sulla giunzione sommatrice (ingresso operazionale), il dispositivo forza a
zero il flusso magnetico, per mezzo di una bobina compensatrice.
L’elemento Hall funziona, quindi, come un amplificatore d’errore di ingresso, la cui sensibilità è
ottimizzata; congiuntamente ad un amplificatore d’uscita ad elevato guadagno e ad elevata corrente,
il circuito fa circolare nella bobina compensatrice una corrente che annulla il flusso magnetico al
traferro e chiude l’anello (figura 24.2) di controllo.
Azionamenti per Automazione Ind. –cap. XXIV Trasduttori
A.A.2008-2009
3
Fig. 24.2 – Schema circuitale di una sonda di Hall ad anello chiuso
Questa corrente può, allora, essere usata direttamente come segnale di uscita. Un resistore di misura
è inserito tra i terminali di misura e il morsetto comune dell’alimentazione per convertire la corrente
d’uscita in un segnale di tensione e per limitare la dissipazione di potenza interna.
Valori tipici delle grandezze fondamentali di una sonda ad effetto Hall ad anello chiuso sono qui di
seguito riportati (sonda LEM LA55-P):
⋅ Banda passante
f:: 0 ÷ 200 kHz;
⋅ Linearity
l: ±0.1%;
⋅ Precisione
x: ±0.5%;
⋅ Tensione di alimentazione
Vc : ±15V;
⋅ Tensione d'uscita
VOUT: 4.9V.
2 Trasduttori di posizione e di velocità
Vengono utilizzati in tutte quelle applicazioni,(servomeccanismi, macchine di processo, tec.), in cui
è necessario conoscere, istante per istante, il valore della posizione angolare o della velocità.
2.1 Resolver.
Una apparecchiatura per la stima della velocità e della posizione di un motore è il dispositivo
“Resolver”, che attualmente con l’ausilio delle tecniche digitali viene sempre più spesso adoperato e
prende il nome di RDC (Resolver to Digital Converter ). Tale dispositivo è costituito
concettualmente da un avvolgimento solidale con il rotore, percorso da una corrente sinusoidale (di
pulsazione più elevata della velocità angolare), e da due avvolgimenti fissi (solidali con lo statore)
in quadratura elettrica tra loro. Uno schema elettrico di principio del resolver è mostrato in figura
24.3.
Azionamenti per Automazione Ind. –cap. XXIV Trasduttori
A.A.2008-2009
4
vS1(t)= VR’ sin(ω t)cos(θ)
Ingresso di eccitazione
vR(t)=VR sin(ω t)
rotore
statore
θ
Uscite modulate in
ampiezza
vS2(t)= VR’ sin(ω t)sin(θ)
statore
Figura 24.3: Modello concettuale del resolver.
Il principio di funzionamento del resolver è il seguente: l’avvolgimento rotante, percorso da una
corrente sinusoidale di pulsazione ω dovuta ad una tensione di eccitazione VR' sin(ω ⋅ t ) , induce
negli avvolgimenti fissi delle f.e.m. costituite da due componenti : una di origine trasformatorica
dovuta alle variazioni della tensione di eccitazione ed un’altra dovuta al moto relativo
dell’avvolgimento rotante rispetto agli avvolgimenti fissi, che è quindi proporzionale al seno o al
coseno dell’angolo θ individuato dalla posizione del rotore rispetto ad un riferimento fisso.
Scegliendo θ =0 quando l’avvolgimento solidale con il rotore è allineato con uno dei due
avvolgimenti fissi (ad esempio S1), le espressioni delle tensioni ai morsetti dei due avvolgimenti
fissi saranno rispettivamente:
Vr (t ) = VR sin(ωt )
vs1 = VR ⋅ sin(ω ⋅ t ) ⋅ cos(θ )
vs 2 = VR ⋅ sin(ω ⋅ t ) ⋅ sin(θ )
Come si vede, si tratta del seno e del coseno della posizione angolare del rotore che modulano in
ampiezza la portante di pulsazione ω presente sull’avvolgimento rotante. L’estrazione del dato che
si desidera ottenere (ossia θ ) da questi due segnali di tensione e la sua trasformazione in un segnale
gestibile da parte di un sistema di elaborazione digitale utilizzato nel controllo dell’azionamento
viene solitamente delegata ad un dispositivo “ad hoc”. Questo dispositivo prende in ingresso i due
segnali modulati, ne effettua la demodulazione, ricava una stima dell’angolo θ’ e lo fornisce in
forma digitale con un numero di bit che determinano la risoluzione angolare assicurata, secondo un
principio analogo a quello di un anello ad aggancio di fase. Lo schema a blocchi del sistema che
assolve a questo compito è mostrato in figura 24.4 . Tale schema prevede in ingresso un blocco
moltiplicatore per funzioni trigonometriche, il cui scopo è di effettuare la moltiplicazione dei
segnali d’ingresso rispettivamente per il seno ed il coseno dell’angolo stimato θ’. In cascata a tale
blocco si trova un amplificatore differenziale alla cui uscita si ottiene un segnale della forma
VR sin(ωt ) ⋅ sin(θ − θ ' ) , il quale, inviato ad un demodulatore di fase fornisce un segnale della forma
VR sin(θ − θ ' ) ≅ VR (θ − θ ' ) per (θ − θ ' ) sufficientemente piccolo. Da questo segnale mediante un
controllore (ad esempio di tipo PI) si può ricavare un segnale di velocità. Questo segnale di velocità
permette a sua volta, mediante un VCO, di controllare un contatore che fornisce una stima della
posizione angolare, la quale, viene poi riutilizzata nel loop dal moltiplicatore.
Parametro critico del RDC è la risoluzione angolare, intesa come minimo scarto angolare rilevabile
dallo strumento. Tale parametro dipende dal rapporto tra il massimo numero di dati, per unità di
tempo che lo strumento è in grado di fornire, e la velocità angolare del rotore, più è piccolo questo
rapporto e minore è la risoluzione angolare ottenibile.
Azionamenti per Automazione Ind. –cap. XXIV Trasduttori
5
A.A.2008-2009
Vr sen(ωt)sen(θ)cos(θ')
Vr sen(ωt)sen(θ)
Vr sen(ωt)cos(θ)
Vr sen(ωt)cos(θ)sen(θ')
Vr sen(ωt)sen(θ-θ')
θ
Vr sen(θ-θ')
θ
Figura 24.4: Schema a blocchi di un RDC.
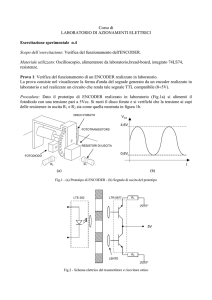
2.2 Encoder incrementale
Tale apparecchiatura converte una posizione angolare in un treno di impulsi o in una parola di nbit, è generalmente costituita da un disco, solidale al motore, in cui in generale vi sono tre tracce,
sulla prima è riportata unicamente la posizione di zero, le altre due hanno invece un certo numero di
posizioni, il cui numero è funzione della risoluzione dell'encoder e sono sfasate fra loro di 90º, al
fine di consentire di conoscere il verso di rotazione del disco. Poiché la rilevazione delle posizioni è
effettuata per via ottica, il disco ha sulle tracce dei fori, allorché gira, la luce emesse da dei LED,
uno per traccia, và in alcuni instanti a colpire non il disco ma dei fototransistori, fig.24.5, causando
una variazione da alto a basso o viceversa, a seconda del tipo di circuito, del segnale di uscita di
questi componenti. Se il disco ha n fori su ciascuna traccia, un intero giro dello stesso causa un
treno di n impulsi, e la risoluzione dell'encoder è pari a 360º /n , inoltre se il duty cycle è :α= tw/T,
con T periodo tra l'inizio di un impulso ed il successivo, e tw periodo dell'impulso, la velocità
ωn
α
1
=
=
angolare può calcolarsi come: f =
T
tw
60
Fig.24.5 - Encoder incrementale.
Questa apparecchiatura nel caso in cui l'alimentazione si interrompe. perde l'informazione, nello
stesso modo di una memoria volatile RAM di un processore. In fig. 24.6 è riportata
l'apparecchiatura ed i treni di impulsi relativi alle tracce dell'encoder.
Azionamenti per Automazione Ind. –cap. XXIV Trasduttori
A.A.2008-2009
6
Fig. 24.6 – Schema di principio di un encoder assoluto a 6 bit
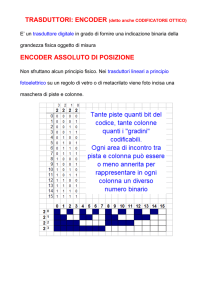
2.3 Encoder assoluto
Sempre nel campo dei sensori di posizione, un dispositivo che offre un livello alto di risoluzione è
l’encoder assoluto, il cui costo però è piuttosto alto.
L’encoder assoluto è costituito da un disco rotante, caratterizzato da zone oscure od opache,
posto tra una fonte di luce (diodi luminosi LED) ed una sequenza di fotorilevatori (figura 24.7).
In base alla sequenza delle tracce, cui corrisponde una certa posizione del disco, la luce prodotta
dai LED raggiunge o meno i fotorilevatori, dando luogo ad un messaggio in codice binario.
Facendo l’esempio di un encoder assoluto a 6 bit, si hanno 64 posizioni distinguibili all’interno di
un giro. Il disco dell’encoder può presentare un codice binario naturale, nel quale possono avvenire
cambiamenti di stato di più bit contemporaneamente, oppure un codice detto “Grey”, nel quale ad
ogni incremento angolare solo uno dei bit di risoluzione può subire una transizione di stato (figura
24.7).
Fig. 24.7 – Dischi di un encoder assoluto
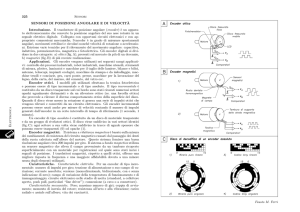
Gli encoder assoluti disponibili in commercio hanno le seguenti caratteristiche: alimentazione da
5-15-24V; uscita binaria ad onda quadra; risoluzione (a seconda dei modelli) fino a 1024, 5000 e
18000 posizioni/giro; risposta in frequenza 50-100 kHz. Sul disco, solidale all'apparecchiatura in
Azionamenti per Automazione Ind. –cap. XXIV Trasduttori
A.A.2008-2009
7
movimento, vi sono un certo numero di tracce (2n), pari al numero di bit necessari per la risoluzione
( R= 360/2n ), e quindi n settori. Le tracce con area scura sono relative al valore 1 del bit mentre
quelle chiare sono relative al valore 0, il bit piu' significativo è posto sulla traccia esterna, mentre
quello meno significativo (LSB) su quella interna.
La velocità può essere calcolata come:
T n 1(min)
T n
2n
1
2
=
2 =
=
2
60(sec) 120
120 f ω
con T il periodo di una traccia. In figura è riportato lo schema di un encoder a 5 bit, ed in
tabella i relativi codici di assegnazione,
θ
0 - 11.25
11.25 - 22.25
22.25 - 37.75
33.75 - 45
------------348.75 - 360
24
0
0
0
0
- 1
23
0
0
0
0
-1
22
0
0
0
0
-1
21
0
0
1
1
-1
20
0
1
0
1
-1
E’ possibile ottenere, a basso costo, un livello di precisione confrontabile con quello di un
encoder assoluto di alte prestazioni, utilizzando congiuntamente le informazioni provenienti da tre
sonde di Hall e da un encoder incrementale.
Il principio di funzionamento delle sonde di Hall per individuare la presenza di un campo
magnetico in prossimità della sonda è analogo a quello descritto per le sonde di corrente ad effetto
Hall.
Fig. 24.8 – Schema semplificato della sonda di Hall
In questo caso, però, la tensione di uscita VH della sonda (figura 24.8) può assumere due livelli, ad
esempio 0V e 5V. La transizione tra questi due livelli avviene in corrispondenza della inversione
del campo cui è sottoposta la sonda. Se tali sonde sono investite dal campo generato dai MP di un
motore brushless, la commutazione di livello avverrà in corrispondenza degli assi interpolari.
Azionamenti per Automazione Ind. –cap. XXIV Trasduttori
A.A.2008-2009
8
Fig. 24.9 – Isteresi di commutazione di una sonda di Hall
In realtà si avrà una certa isteresi nel punto di commutazione, per evitare incertezze nella
commutazione, l’ampiezza dell’isteresi è di pochi millesimi di Tesla (figura 24.9). Poiché la
distanza tra due assi interpolari è di 120° elettrici, ogni livello d’uscita si mantiene attivo per
altrettanti gradi elettrici. Le sonde di Hall, vengono generalmente montate sullo statore nella parte
terminale degli avvolgimenti di fase, con disposizione spaziale a 120° elettrici l’una dall’altra
(figura 24.10).
ω
θ
Fig. 24.10 – Disposizione spaziale delle sonde di Hall
Da quanto detto segue che, combinando le uscite delle tre sonde di Hall (H3, H2, H1), i 360° elettrici
vengono divisi in 6 settori di 60° ciascuno, così da poter individuare la posizione del rotore per
somma di angoli discreti di 60°.
La precisione offerta dall’uso esclusivo di questi dispositivi non è sufficiente a poter implementare
un controllo in retroazione che abbisogni della stima della posizione del rotore. A tal fine s’integra
l’informazione proveniente dalle sonde H3, H2, H1 con quella proveniente da un encoder
incrementale.
Un encoder incrementale si differenzia da uno assoluto per la tecnica costruttiva, avendo in uscita
tre soli segnali attraverso i quali è possibile ottenere informazioni circa l’incremento angolare, il
verso di rotazione ed il passaggio per un punto di zero all’interno dei 360° meccanici.
Azionamenti per Automazione Ind. –cap. XXIV Trasduttori
A.A.2008-2009
Questo dispositivo consente di discretizzare un angolo minimo di avanzamento pari a D =
9
2π
, ove
2N
N è il numero di bit dell’encoder.
L’uso congiunto delle tre sonde di Hall e dell’encoder incrementale permette di rilevare la posizione
2π
del rotore con la precisione data dalla divisione minima angolare pari a D I =
⋅ Pc radianti
Ps ⋅ 2 N
elettrici, ove Pc è il numero di coppie polari del motore, sfruttando le informazioni sulla posizione
assoluta date dalle sonde di Hall Ps (numero di mezzi passi polari).
θ
θ
θ
Fig. 24.11 – Segnali ottenuti dal posizionamento di due sonde di Hall, distanti mezzo passo polare
3 Torsiometri
I torsiometri sono dispositivi che permettono di determinare la rotazione relativa, dovuto al
momento motore, di due sezioni rette poste a distanza L l’una dall’altra. Quindi, supposta valida la
legge di Hooke secondo cui le (piccole) deformazioni sono proporzionali ai carichi che le hanno
prodotte, si può risalire al valore della coppia trasmessa dalla espressione :
C• L
Δθ =
G • Jp
in cui Δθ è la rotazione relativa espressa in radianti, C è la coppia da misurare in Nm, G il modulo
elastico tangenziale in N/m2, Jp il momento d’inerzia polare della sezione circolare dell’albero in
m4.
Figura 24.12: Schema di torsiometro con sensori capacitivi
Per la determinazione della rotazione relativa da introdurre nella formula si adoperano sensori
elettrici di svariati tipi. Un tipo utilizza un condensatore a capacità variabile, con le armature
solidali due differenti sezioni dell’albero di trasmissione. La rotazione relativa di tali sezioni fa
variare la capacità del condensatore perché varia l’estensione delle superfici affacciate : misurando
con un opportuno sistema elettrico tali variazioni di capacità si può risalire al valore della rotazione
relativa e da questa al valore della coppia. Un altro tipo spesso usato è quello che utilizza
Azionamenti per Automazione Ind. –cap. XXIV Trasduttori
A.A.2008-2009
10
l’indicazione data da due bobine il cui campo magnetico varia ad impulsi. Sull’albero motore sono
montati, a una mutua distanza L, due dischi portanti una sporgenza radiale che in corrispondenza
della bobina produce una variazione delle riluttanze del circuito magnetico.
Fig. 24.13 -Schema sintetico di un torsiometro con sensori elettromagnetici
Dallo sfasamento degli impulsi, registrato su un rivelatore elettronico graduato si risale al valore
della rotazione relativa quindi all’entità della coppia trasmessa.
4 Disturbi nelle misure (Saltare)
Particolare attenzione va posta ai disturbi indotti sul segnale delle catene di misura, infatti l'elevata
frequenza di commutazione del convertitore (per es. 15KHz) e la vicinanza di circuiti di potenza e
di segnale quali la linea di alimentazione dal convertitore al motore e la linea di trasmissione dei
segnali provenienti dall'encoder al microcontrollore, generano sensibili interferenze
elettromagnetiche, sotto forma di disturbi di tipo impulsivo. Gli impulsi sovrapposti ai segnali di
conteggio e di riferimento dell'encoder, sono di entità tale da superare la soglia di transizione delle
porte logiche del circuito di interfaccia, causando errore e malfunzionamento nel controllo.
L'indispensabile pulizia dei segnali provenienti dall'encoder viene effettuata con porte a isteresi (o
trigger di Schimdt) in modo che il loro scatto avvenga solo in corrispondenza di vere e proprie
transizioni e non di segnali spuri.
Inoltre, è necessario poi tenere presente che tutti i segnali in ingresso ed in uscita dai circuiti di
controllo devono essere galvanicamente separati dal sistema di potenza e quindi dall'impianto. Si
distingua il caso in cui il segnale è di tipo analogico da quello in cui è di tipo digitale.
Nel primo dopo un disaccoppiamento dal sistema di potenza effettuato per mezzo di un adatto
disaccoppiatore , deve essere implementato un filtro di segnale, prima dell'interfaccia con un
convertitore A/D per es. di un microcontrollore. In fig. 24.14 è riportato lo schema del
disaccoppiatore capacitivo Burr-Brown ISO122P.
Azionamenti per Automazione Ind. –cap. XXIV Trasduttori
15
11
A.A.2008-2009
+Vs1
gnd
-Vs1
Vin
Vout
-Vs2
7
Vin
Vout
10
8
9
-Vs2
2
16
1
gnd
+Vs2
-Vs1
gnd
+Vs1
gnd
+Vs2
Fig.24.14 - Disaccoppiatore capacitivo
Viene descritto questo componente per mostrare quali debbono essere le caratteristiche che debbono
pesare nella scelta:
banda passante 50 kHz, un massimo di non linearità del 0.02%, un range di tensione di ingresso ±
12.5V (V ), un range di tensione in uscita (Vout) pari a ±10 V, una tensione di isolamento pari a
1500 Veff , per quanto riguarda le alimentazioni queste debbono essere in continua e con terre
separate, ±Vs1 e ±Vs2 hanno un campo di variazione da ±4.5 V a ±18 V ed il valore si consiglia
intorno a ±15 V.
Due questioni meritano un cenno:
l'ingresso all'isolatore che deve avere un intervallo di tensione stabilito, questo può essere realizzato
inviando il segnale analogico (per es. uscita da una dinamo tachimetrica, rilevamento di una in
tensione, ecc.) ad un trimmer (partitore resistivo) che dovrà essere opportunamente regolato.
generazione delle alimentazioni, queste potranno essere realizzate prendendole separatamente da un
piccolo trasformatore a più uscite, opportunamente raddrizzate e filtrate con per es. un condensatore
in parallelo.
La presenza del filtro, successivo all'isolatore,è dovuta al fatto che essendo il segnale campionato
(con frequenza f ) e destinato ad essere elaborato da un sistema di tipo discreto è necessario
anteporre al campionatore un filtro passa basso antialiasing. Infatti per il teorema del
campionamento (Shannon) il segnale da ricostruire deve avere una banda di frequenze limitata ed
inferiore ad fs/2. Può per esempio adottarsi un filtro di Bessel del secondo ordine, che ha una
pendenza in fase lineare e quindi si avvicina ad un comportamento ideale per quanto riguarda il
tempo di ritardo, sia perché non è necessaria una pendenza di attenuazione molto elevata.
Negli esempi precedenti non si è fatto riferimento all'acquisizione di un segnale in corrente, giacché
questo viene oggi realizzato tramite un cosiddetto trasformatore ad effetto Hall che per sua natura
fornisce la separazione galvanica dell'output dall'input.
Nel caso in cui invece il segnale è già di tipo digitale la separazione può essere ottenuta per es. per
via ottica utilizzando il fotoaccoppiatore veloce H11L1, fig. 24.15. Tale componente è ottenuto
dall'accoppiamento ottico di un IRED di arseniuro di gallio con un sensore integrato che ha in uscita
un trigger di Schimdt. Viene impiegato per applicazioni che richiedono isolamento
galvanico,elevati tempi di risposta e immunità al rumore e.m.
Azionamenti per Automazione Ind. –cap. XXIV Trasduttori
Icc
5V
6
R
L
4
Vo
5
Vo output volt
If
12
A.A.2008-2009
5
Voh
Ifoff
Ifon
Vol
.75 1
2
If Input current
If
ton
toff
Vo
tf
tr
Fig.24.15 – fotoaccoppiatore
Le principali caratteristiche sono: ton =1.2÷4μs, toff =1.2÷4μs, tf =0.1μs (fall time), tr =0.1μs (rise
time), tensione di uscita Vo = 0.2 (low)÷ 5 (High) V, corrente di ingresso nel caso si vuole l'uscita
Vo a livello basso If(on)=1÷1.6 ma, corrente di ingresso nel caso si vuole l'uscita Vo a livello alto
If(off)=0.3÷0.75 ma, si noti a) come il legame ingresso uscita del componente è invertente, b) che la
tensione di ingresso deve essere tale da fornire per i valori di tf e tr voluti e l'impedenza presente,
per es. 50Ω, la corrente If prima definita, c)l'effetto di isteresi (v. fig.) tra il segnale positivo di If on
e quello off, d) i valori di ton e toff (v. fig.) vengono fatti partire dal circa il 10% della If. Infine si
tenga presente che l'alimentazione dell'uscita Vcc deve essere compresa tra 3 e 15 V e che per
Vcc=5V ed If=0 la Icc sarà compresa tra 1 e 5 ma.