Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
I convertitori statici ca/cc e cc/cc
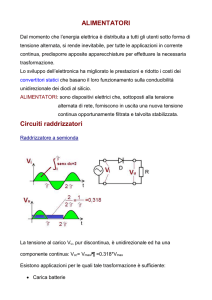
Generalità sui convertitori statici.
La produzione industriale dell'energia elettrica viene fatta, come è noto, quasi esclusivamente sotto
forma di corrente alternata trifase. L'impiego della corrente alternata (c.a.) consente, tramite i
trasformatori, un agevole adattamento dei livelli di tensione ai valori che risultano di volta in volta più
opportuni; la scelta del sistema trifase deriva invece dalla sua maggiore economicità rispetto ad altre
soluzioni. Esiste però una serie di importanti applicazioni, sia industriali che civili, che richiedono
alimentazioni a corrente continua ( c.c. ) o frequenza diversa da quella di rete. Si possono citare a
titolo d'esempio i casi delle applicazioni elettrochimiche, delle linee di trasmissione a c.c., dei forni a
induzione, dei sistemi di carica degli accumulatori. Spesso inoltre è richiesta una rapida regolazioni
dell'ampiezza o della frequenza della corrente erogata al carico. È questo il caso di molti alimentatori
regolabili e degli azionamenti a velocità variabile di motori a corrente continua o a corrente alternata.
Infine va citato il caso di alcune utilizzazioni privilegiate (sale operatorie, centri di calcolo ecc.), la
cui alimentazione deve essere garantita anche in caso di guasto della rete di distribuzione
(alimentazioni a continuità assoluta). Tutti i campi applicativi sopra citati sono accomunati
dall'esigenza di operare una conversione dell'ampiezza o della frequenza della tensione di rete, e si
chiamano convertitori i dispositivi capaci di operare questa conversione. Alcuni dei tipi di
conversione di frequenza sopra indicati possono essere effettuati tramite opportuni collegamenti fra
motori e generatori a c.c, o c.a., oppure con opportune macchine elettriche speciali. È questa la
famiglia dei convertitori rotanti, che hanno avuto ampia diffusione nel passato e che trovano ancora
oggi impiego in alcune particolari applicazioni. La soluzione più moderna ai problemi di conversione
è data dai convertitori statici, basati sull'impiego di interruttori elettronici allo stato solido (diodi,
transistori, tiristori, ecc.), che derivano il loro nome di statici dal fatto di non includere alcun organo
in movimento. La formidabile diffusione dei convertitori statici, in continuo crescendo a partire dagli
anni 60, trova spiegazione nella loro economicità, flessibilità d'impiego e affidabilità, e negli elevati
rendimenti energetici che li caratterizzano. Alla base dello sviluppo di convertitori statici di
caratteristiche sempre più avanzate sta l'evoluzione delle tecnologie di produzione dei componenti
elettronici di potenza, che ha reso disponibili interruttori elettronici sempre più potenti, veloci ed
economici. Altri motivi che hanno contribuito alla sempre maggiore diffusione dei convertitori statici
sono legati allo sviluppo di dispositivi di segnale a semiconduttore, di elevatissima affidabilità e di
grande velocità operativa, che hanno reso possibile l'applicazione di tecniche di comando e di
controllo sempre più sofisticate. Ciò ha consentito di migliorare le prestazioni dei convertitori statici,
aprendo interi nuovi campi di applicazione: è questo ad esempio il caso degli azionamenti a c.a. ad
elevate prestazioni dinamiche. Rivoluzionaria, da questo punto di vista, è stata l'introduzione dei
sistemi di controllo a microprocessore, che ha consentito di ampliare le prestazioni dei sistemi,
dotando ciascuno di essi di una propria «intelligenza», e di ridurre nel contempo la complessità dei
circuiti di controllo, le cui funzioni vengono in buona parte demandate al microelaboratore. Dalle
considerazioni precedenti discende che i convertitori statici includono sempre uno o più interruttori le
cui aperture e chiusure vengono controllate in modo da operare la conversione desiderata. Come si
vedrà, le forme d'onda di corrente e di tensione che ne risultano sono spesso ricche di componenti
armoniche indesiderate, sicché spesso i convertitori impiegano anche induttori o condensatori per la
realizzazione di reti con funzioni di filtraggio (filtri). Le principali categorie di convertitori
attualmente in uso sono:
A. Convertitori CC-CC.
Sono i dispositivi (alcuni indicati anche come chopper) atti a effettuare la conversione da una
tensione continua d'ingresso a una tensione continua di uscita di valore diverso. Questi convertitori
2006 - S.Bolognani, M.Zigliotto
18 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
sono utilizzati quali alimentatori a c.c. nei più diversi settori d'impiego: dall'elettronica diffusa, ai
calcolatori; dalle applicazioni avioniche e spaziali, agli alimentatori da laboratorio. Trovano inoltre
applicazione per la regolazione della velocità dei motori nei sistemi di trazione elettrica alimentati a
c.c. e con motori in c.c. (ferrovie, metropolitane, veicoli elettrici di ogni genere). Esistono tre tipi
fondamentali di convertitori c.c. / c.c., che differiscono per prestazioni e criteri di progetto. Essi sono i
convertitori abbassatori di tensione, nei quali la tensioni in uscita e sempre non maggiore di quella di
ingresso (buck converters), i convertitori elevatori, nei quali invece la stessa tensione è sempre
maggiore di quella di ingresso (boost converters) e i convertitori abbassatori-elevatori, che possono
funzionare con tensione di uscita sia maggiore che minore di quella di ingresso (buck-boost
converters). Altre classificazioni possono fare riferimento alle diverse polarità della tensione e della
corrente di uscita e saranno rihiamate in seguito.
B. Convertitori CC-CA.
Sono i dispositivi, detti anche invertitori (inverter), atti ad effettuare la conversione da una tensione
continua d'ingresso a una tensione alternata di uscita che, nel caso più generale, deve essere regolata
sia in ampiezza che in frequenza. Questi convertitori sono utilizzati come alimentatori a c.a. in diversi
settori: azionamenti a velocità variabile con motori a c.a. in cui è richiesto di alimentare il motore con
tensioni e correnti di frequenza e ampiezza variabili; alimentatori a continuità garantita anche in
assenza di rete (gruppi statici di continuità assoluta), per realizzare i quali si utilizzano batterie di
accumulatori, da cui l'inverter preleva l'energia necessaria per alimentare il carico quando la rete non
è in grado di fornirla; sistemi di alimentazione di forni a media frequenza per il riscaldamento a
induzione; stadi di isolamento basati sull'impiego di trasformatori ad alta frequenza (particolarmente
in uso nei convertitori c.c./c.c. qualora sia richiesto l'isolamento tra l'ingresso e l'uscita).
C. Convertitori CA/CC.
Sono i dispositivi, detti anche raddrizzatori, atti a effettuare la conversione da una tensione alternata
d'ingresso a una tensione continua d'uscita o, quantomeno, a valore medio diverso da zero. Se il
convertitore consente la regolazione dell'ampiezza della tensione di uscita esso prende nome di
raddrizzatore controllato; in caso contrario si parla di raddrizzatore non controllato. Questa famiglia
di convertitori è senz'altro la più diffusa. I campi di impiego dei raddrizzatori sono infatti
numerosissimi: si possono ricordare gli azionamenti a c.c. per uso industriale (laminatoi; trafile;
continue per carta, plastiche, tessili; nastri trasportatori; macchine utensili con relativi sistemi di
posizionamento; bracci di robot ecc.) e quelli per trazione con linea di alimentazione in alternata
(filobus, locomotori per treni e metropolitane, funicolari, funivie ecc.); i sistemi di alimentazione e
controllo dei processi elettrochimici; le stazioni terminali di conversione delle linee di trasmissione a
c.c.; le stazioni di alimentazione del sistema ferroviario nazionale; gli stadi di alimentazione a c.c.
richiesti in ingresso ai convertitori c.c./ c.c. e a quelli c.c./c.a..
D. Convertitori CA/CA.
Sono i dispositivi atti a effettuare la conversione da una tensione alternata d'ingresso a una tensione
alternata di uscita regolabile in frequenza e in ampiezza. Se la frequenza di uscita è maggiore di quella
di ingresso, si parla di cicloinvertitori. Se invece è minore allora sono denominati cicloconvertitori.
Se si opera una sola regolazione dell’ampiezza si parla di regolatori in c.a.. Questi tipi di convertitori
vengono impiegati ad esempio nelle alimentazioni di bordo degli aeroplani (per ottenere i 400 Hz in
uso nelle applicazioni avioniche a partire dalle frequenze più elevate, e variabili, fornite da un
generatore sincrono calettato al motore dell'aereo ), nella regolazione di sistemi di illuminazione e
riscaldamento, negli azionamenti di macchine a c.a. (particolarmente per regolare la velocità di grandi
motori trifase a bassa frequenza, di motori monofase alimentati a frequenza di rete), e in numerose
applicazioni elettrodomestiche ove è necessario regolare la velocità di piccoli motori universali.
2006 - S.Bolognani, M.Zigliotto
19 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
I legami tra tipo di energia in ingresso ed uscita dei diversi tipi di convertitore sono indicati nella
seguente tabella riassuntiva:
Le principali categorie di convertitori.
uscita ►
continua
alternata
(freq. f2)
▼ingresso
continua
frazionatore
o chopper
invertitore (monofase o trifase)
alternata
(freq. f1)
raddrizzatore (non contr.)
raddrizzatore controllato
cicloconvertitore (f2< f1)
cicloinvertitore (f2> f1)
regolatore in c.a. (f2= f1)
Raddrizzatore monofase a semionda.
Il più semplice circuito raddrizzatore è rappresentato in Fig.1; esso comprende una fonte di tensione
alternata ua, un diodo (non controllato) e un carico rappresentato dalla resistenza R. In corrispondenza
della semionda positiva della tensione applicata ua, il diodo è polarizzato direttamente e conduce. La
caduta di tensione interna è trascurabile, per cui si ritiene uAK = O. La corrente vale i = ua/R e quindi
è sinusoidale, e risulta uu = ua. In corrispondenza del passaggio dalla semionda positiva a quella
negativa di ua, anche la corrente tende ad invertirsi e il diodo quindi si blocca restando polarizzato
inversamente per tutta la semionda negativa. Allora risulta i = 0, uu = 0 e uAK = ua (negativa). L'intera
semionda negativa della tensione applicata si localizza quindi come tensione inversa ai capi del diodo
e la massima tensione inversa sarà pari a -UM essendo UM il valore massimo della tensione di
alimentazione.
Fig.1
La corrente sul carico risulta unidirezionale (come la tensione sul carico) e, nel caso di carico
resistivo in esame, segue l'andamento delle semionde positive della tensione di alimentazione. Il
2006 - S.Bolognani, M.Zigliotto
20 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
valore medio è diverso da zero, e rappresenta la componente continua (che è lo scopo del
raddrizzamento). Si assume questo valore medio Ic come valore della corrente continua risultante. La
frequenza della tensione impulsiva sul carico è pari alla frequenza f della tensione di alimentazione.
Se con Ua si indica il valore efficace della tensione di alimentazione, pari a UM/√2, e con Uc il valore
medio della tensione sul carico che si assume come tensione continua sul carico, risulta
Uc =
1 π
U
U
U M sin (ϑ )dϑ = M [− cos ϑ ]π0 = M
2π 0
2π
π
∫
(1)
Se invece il carico presenta anche una componente induttiva (carico RL), gli andamenti della
tensione e della corrente diventano del tipo illustrato in Fig.2. Il circuito infatti è governato dalla
legge
u a = u AK + Ri + L
di
dt
(2)
Fig. 2
All’inizio, con tensione applicata positiva, la corrente inizia a crescere. Il diodo conduce e si può
pensare che abbia tensione nulla ai suoi capi. Pensando ad una caduta nulla sul diodo in conduzione,
quando la caduta resistiva uguaglia la tensione applicata la corrente smette di crescere (di/dt=0: vedi
eq. (2)). Subito dopo, la tensione ai capi dell’induttanza diventa negativa e la corrente comincia a
calare, fino ad annullarsi. Naturalmente essa non può invertirsi per la presenza del diodo. In
particolare, l'estinzione della corrente avviene quindi ad ogni semionda con un certo ritardo ∆t. In
questo intervallo, pur essendo la tensione applicata al circuito già divenuta negativa, il diodo rimane
ancora in conduzione, perché l'anodo è mantenuto positivo rispetto al catodo dalla f.e.m. di
autoinduzione, che è positiva perché la corrente sta decrescendo:
u AK = u − Ri − L
di
≥0
dt
(3)
L’effetto della componente induttiva è dunque quello di prolungare la conduzione, e
corrispondentemente di far calare la tensione media ai capi del carico R-L, perché ad esso viene
applicata anche parte della semionda negativa della tensione d’ingresso. Tale detrazione di tensione
dipende dai parametri del carico, dai quali dipende ∆t.
Si può ovviare a questo inconveniente collegando in parallelo al carico un diodo di libera circolazione
Dc come in Fig.3. La corrente iai sostenuta dall’energia immagazzinata nell’induttore, invece di
richiudersi contro la tensione inversa della linea di alimentazione si estingue attraverso il diodo Dc
che equivale, in questo intervallo, ad un corto circuito applicato fra i morsetti del carico.
Il processo di estinzione della corrente di autoinduzione iai avviene in tal caso secondo la legge
esponenziale
iai (t ) = i (T 2 ) e − t τ
(4)
dove τ=L/R.
2006 - S.Bolognani, M.Zigliotto
21 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
Corrispondentemente, la conduzione del diodo principale si estingue bruscamente alla fine della
semionda positiva della tensione applicata, come è rappresentato in Fig.4. Il valore medio della
tensione rettificata può così conservarsi uguale a quello che caratterizza lo stato di funzionamento
puramente resistivo, per quqlsiasi valore di L e R.
Fig3
Fig.4
Principio di funzionamento dei raddrizzatori controllati.
In alcuni casi è necessario poter regolare la tensione fornita da un
alimentatore. Per questo scopo si possono impiegare gli usuali
circuiti raddrizzatori, sostituendo i diodi con tiristori. Di solito si
tratta di alimentatori di potenza elevata a più fasi. Per semplicità si
considera il caso del raddrizzatore controllato a semionda, con un
solo tiristore T, il carico resistivo R, e tensione d'alimentazione Ua
sinusoidale
(Fig.5).
Fra
l'elettrodo di controllo G (gate)
ed il catodo K è applicato un
opportuno generatore di impulsi
che provvede a fornire gli
impulsi
di
corrente
iG
nell'istante voluto di ciascuna
delle semionde positive della
tensione applicata ua, durante le
queli, se non è in conduzione, il
tiristore
è
polarizzato
Fig.5 – Raddrizzatore controllato
positivamente
e
quindi
Fig.6 – Forme d’onda del
monofase a semionda
raddrizzatore di Fig. 5
predisposto ad entrare in
conduzione. È facile comprendere che il regime del sistema viene
determinato dal tempo di ritardo ti che definisce (rispetto all'inizio di ciascuna delle semionde positive
di tensione, istanet in cui entrerebbe naturalmente in conduzione un diodo non controllato: istante di
conduzione naturale) l'istante in cui viene applicato all'elettrodo di controllo G l'impulso di corrente
iG che provoca lo sblocco del tiristore e l'inizio dell'intervallo di conduzione; al tempo di ritardo ti
corrisponde il ritardo angolare α=ωti comunemente designato come angolo di innesco del tiristore; il
supplementare di quest'angolo γ=(π-α) costituisce l'angolo di conduzione relativo a ciascuna delle
semionde positive della tensione applicata ua. Durante la semionda negativa il tiristore non può
condurre se il varico è resistivo (si veda il funzionamento del raddrizzatore a semionda con diodo non
controllato). Durante quella positiva, il tiristore inizia a condurre quando si invia l'impulso positivo iG
sul gate G. Allora il tiristore conduce come un normale diodo e continua a condurre per il resto della
semionda. Esso si blocca di nuovo all’inizio della successiva semionda negativa, ove la corrente tende
ad invertirsi. Nell'ipotesi che l'impulso iG venga inviato in ogni periodo, la curva della tensione
2006 - S.Bolognani, M.Zigliotto
22 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
d'uscita Uu si ripete. È chiaro che il valore medio della tensione d'uscita è proporzionale all'area
annerita, come riportato in Fig.6. Regolando il ritardo ti dell'impulso rispetto all’inizio della sinusoide
della tensione d'alimentazione, si regola la tensione media d'uscita. Se ti = 0, significa che l'impulso di
innesco viene applicato all'inizio di ciascuna semionda positiva e in tal caso si ha γ= πi: il tiristore
funziona allora a semionda intera, esattamente come un diodo. Per α>0 si hanno i comportamenti
descritti in Fig.6, in cui sono rappresentati nell’ordine la tensione applicata, gli impulsi di innesco iG
applicati al gate G col prefissato ritardo ti; la frazione UAK dell'onda di tensione applicata Ua che si
localizza fra l'anodo ed il catodo nella fase di blocco del tiristore, costituita dalle semionde negative,
come nei diodi, ed in più dalle frazioni d'onda positive che precedono l'istante di sblocco. Infine, è
riportata la frazione d'onda rimanente che costituisce la tensione di uscita uu, agente ai capi della
resistenza di carico R, la quale viene pertanto attraversata dalla corrente i = uu/R. Il valore medio
U u della tensione rettificata d'uscita diviene massimo, ed è uguale a quello fornito dal raddrizzatore a
diodo, per ti = 0; va poi decrescendo con l'aumentare di ti per tendere a zero quando ti si avvicina a
T/2, a cui corrisponde angolo di innesco α =π. Ricordando che vale naturalmente ωT=2π, risulta
1
Uu =
T
T2
∫t
i
U
U M sin(ωt )dt = M
T
T 2
1
− ω cos(ωt )
ti
=
UM
(1 + cos(ωt i )) = U M (1 + cos α )
ωT
π
2
(5)
Il grado di regolazione, rappresentato dal valore medio percentuale U% della tensione regolata in
rapporto al valore massimo U u ,max , risulta così espresso dalla relazione
U% = 100
Uu
U u ,max
= 100
1 + cos α
2
(6)
Si osservi che il valore U u ,max corrisponde alla tensione di uscita del corrispondente raddrizzatore a
semionda non controllato.
Tale relazione viene rappresentata in Fig.7 e costituisce la caratteristica di regolazione del
raddrizzatore controllato monofase, con carico puramente resistivo.
Fig.7 – Tensione % in uscita in funzione di α
Fig.8 – Correnti e tensione del circuito di Fig. 5 con carico RL
Se invece il carico presenta anche una componente induttiva, gli andamenti della tensione e della
corrente diventano del tipo illustrato in Fig.8. Valgono infatti considerazioni analoghe a quelle fatte
per il raddrizzatore a semionda non controllato, con la sola importante differenza che l’istante di
inizio della conduzione del diodo avviene in corrispondenza del ritardo α stabilito dal controllo del
tiristore.
L’effetto della componente induttiva è ancora quello di prolungare la conduzione, e
corrispondentemente di far calare la tensione media ai capi del carico R-L, perché ad esso viene
applicata anche parte della semionda negativa della tensione d’ingresso. Per evitare questo
inconveniente e ristabilire sul carico la tensione media data dalla (5), in parallelo al carico induttivo si
collega un diodo di libera circolazione DC (free-wheeling diode), come in Fig.9.
2006 - S.Bolognani, M.Zigliotto
23 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
Fig.9
vers. 1.0
Fig.10
Attraverso questo diodo la corrente sostenuta dall'autoinduzione può richiudersi sul carico senza
essere obbligata a ritornare contro la tensione di linea già divenuta negativa.
L’andamento è riportato in Fig.10, ove si osserva anche come la corrente che attraversa il tiristore T si
tronchi bruscamente alla fine di ciascuna delle semionde positive della tensione applicata, in quanto il
tiristore si considera privo di elementi induttivi. La caratteristica di regolazione del raddrizzatore, in
presenza del diodo di ricircolo, ha pertanto ancora l’andamento riportato in Fig.7.
A. Esercizio 1.
Si consideri il circuito di Fig.1a). La tensione di alimentazione sia Ua,eff=240Vrms (valore efficace), 60 Hz
(Stati Uniti) e la resistenza di carico sia R=40 Ω. Si determinino la corrente di picco nel diodo, la massima
tensione inversa ai capi del diodo e la potenza media sul carico R.
2 U a , eff
339.4
=
= 8.48 A . La massima tensione inversa ai capi
R
40
del diodo coincide con la tensione massima applicata (339.4 V). Infine, la potenza media sul carico resistivo
vale:
Svolgimento. La corrente di picco vale I p =
Pmedia =
=
U a2, M
4R
(*) U 2
U a2, M T 2 2
U a2, M T 2 1
1 1 T2 2
u a dt =
sin (ω t )dt =
(1 − cos (2ω t ))dt = a, M
T R 0
RT 0
RT 0 2
2 RT
∫
=
339.4 2
= 720 W
4 * 40
∫
∫
T 2
1
sin (2ω t )
t −
2ω
0
=
[(*) Il cos(2ωt) integrato su T/2 dà chiaramente risultato nullo]
Ovviamente in questo caso la potenza media è pari alla metà di quella che si ottiene collegando direttamente
(senza diodo) la resistenza alla tensione di alimentazione. Con il diodo, la resistenza è infatti alimentata una
semionda sì e una no.
B. Esercizio 2.
Al carico di Fig.1a) si aggiunga un elemento induttivo. I valori del circuito così modificato siano i seguenti:
Ua,eff=120Vrms, R=10Ω, L=100mH.
a.
b.
c.
Si derivi un’espressione matematica che descriva l’andamento della corrente di carico nel tempo;
Si determini l’istante t’ nel quale la corrente di carico si annulla;
Si indichi se esiste un valore di L per il quale la corrente nel carico non si annulla mai, giustificandone la
ragione;
d. Si pensi di aggiungere un diodo di ricircolo ai capi del carico, come indicato in Fig.3. Si calcolino i valori
della tensione e della corrente media di carico in questa nuova situazione.
2006 - S.Bolognani, M.Zigliotto
24 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
Svolgimento. a) Si tratta di risolvere la semplice equazione differenziale che regola il bilancio delle tensioni nel
circuito, durante la fase di conduzione del diodo:
u a (t ) = U a, M sin (ω t ) = R i + L
di
dt
L’omogenea associata porge
i o (t ) = I o e − t
τ
con τ = L R = 0.1 10 = 0.01 s
L’integrale particolare è del tipo
i p (t ) = I p sin(ω t − ϕ)
che, sostituito nell’equazione di maglia dà
I p R sin(ω t − ϕ) + I p ω L cos(ω t − ϕ) = U a ,M sin(ω t )
Applicando le formule trigonometriche di addizione e sottrazione1 e raccogliendo si ottiene:
I p sin (ω t )[ R cos (ϕ) + ω L sin (ϕ) ] = U a ,M sin (ω t )
I cos (ω t )[ω L cos (ϕ) − R sin (ϕ) ] = 0
p
La seconda equazione porge subito2
cos (ϕ) =
R
sin(ϕ)
ωL
tg (ϕ) = ω L R = ω τ
e
⇒ ϕ = atg(ω τ) = atg(2π 60* 0.01) = 1.311 rad
La prima di queste equazioni, sostituita sopra porge
R2
Ip
+ ω L sin(ϕ) = U a ,M
ωL
Z
ωL
I p = U a ,M
=
2 ωL
2
R + (ω L )
⇒
U a ,M
R 2 + (ω L )2
=
120 2
10 2 + (2π60 * 0.1)2
= 4.351A
Imponendo una corrente iniziale nulla si ottiene subito:
i(0 ) = I o + I p sin(− ϕ) = 0 ⇒ I o = I p sin(ϕ) = 4.351 sin(1.311) = 4.2A
e l'espressione cercata è pertanto la seguente:
i(t ) = I o e − t τ + I p sin(ωt − ϕ) = 4.2 e −100t + 4.351 sin ( 377 t − 1.311 )
[A]
L’andamento è riportato in figura.
b) L’istante t’ in cui la corrente si annulla si ottiene imponendo i(t’)=0 nell’espressione appena ricavata. Si tratta
di un’equazione trascendente, che va risolta per via numerica impiegando ad esempio la funzione del Matlab3. Si
trova t’=0.0125 s.
1
sin (α − β ) = sin (α )cos(β ) − sin (β )cos(α )
cos(α − β ) = cos(α )cos(β ) + sin (α )sin (β )
ωL
Z
ϕ
2
L’interpretazione grafica della seconda equazione trigonometrica è la seguente:
R
3
Si tratta innanzitutto di scrivere nel file testo « valore.m » la definizione della funzione di cui si desidera trovare
lo zero:
function [current] = valore(t) ; current=4.2*exp(-100*t)+4.351*sin(377*t-1.311);
ed utilizzare poi da desktop la funzione fzero(‘valore’, 0.01), dove 0.01è un “guess-value” iniziale.
2006 - S.Bolognani, M.Zigliotto
25 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
c) Non esiste alcun valore di induttanza per il quale la corrente nel
carico non si annulla mai. Se per assurdo la corrente non si
annullasse mai (funzionamento continuo) ci sarebbe una corrente
media positiva sul carico, mentre la tensione media di
alimentazione è nulla. Questo è possibile, in via teorica solo con
resistenza nulla. Si provi a calcolare la forma d’onda della corrente
in questa situazione teorica.
200
tensione
150
100
corrente (*10)
50
0
t'=12.5ms
-50
-100
imedia=2.5 A
implicherebbe una tensione media non nulla sull’induttanza, alla
quale corrisponderebbe una crescita o un calo indefinito della
corrente nella stessa, situazione chiaramente inammissibile.
-150
-200
vers. 1.0
0
1
2
3
4
5
6
7
d) Applicando un diodo di ricircolo, la tensione media sul carico ritorna ad essere quella relativa ad una
semionda della tensione d’ingresso:
uc, m =
1
T
T 2
∫0
U a, M sin (ω t ) dt =
U a , M cos(ω t ) T
−
T
ω 0
2
=2
U a, M
2π
=
120 2
π
= 54 V
La corrente media si calcola ricordando che essa si annulla in t’:
im =
=−
1
T
τ Io
T
t'
∫0 I o e
[e
−t τ
−t' τ
+ I p sin (ωt − ϕ ) dt = −
]
−1 −
Ip
ωT
τ Io
T
[e τ ] − ωI T [cos(ω t − ϕ )]
−t
t'
0
p
[cos(ω t '−ϕ ) − cos(ϕ )] = 2.467 A
t'
0
=
???????????????????
Allo stesso risultato si poteva pervenire in modo più semplice ricordando che la tensione media su un induttore in
regime periodico è nulla e, quindi, tutta la tensione media sopra calcolata cade sulla resistenza dando luogo ad
una corrente media di uc,m/R=5.4 A.
Generalità sui convertitori c.a.-c.c.
Si chiamano convertitori c.a.-c.c. o raddrizzatori i dispositivi atti a effettuare la conversione da una
tensione alternata d'ingresso a una tensione continua di d'uscita. Se il convertitore consente la
regolazione della tensione di uscita esso prende il nome di raddrizzatore controllato; in caso contrario
si parla di raddrizzatore non controllato. Questa famiglia di convertitori è senz'altro la più diffusa. I
campi di impiego dei raddrizzatori sono infatti numerosissimi: si possono ricordare gli azionamenti a
c.c. per uso industriale (laminatoi; trafile; continue per carta, plastiche, tessili; nastri trasportatori;
macchine utensili con relativi sistemi di posizionamento; bracci di robot ecc. ) e quelli per trazione
(filobus, locomotori per treni e metropolitane, funicolari, funivie, ecc. ) con alimentazione da rete in
tensione alternata; i sistemi di alimentazione e controllo dei processi elettrochimici; le stazioni
terminali di conversione delle linee di trasmissione a c.c.; le stazioni di alimentazione del sistema
ferroviario nazionale; gli stadi di alimentazione a c.c. richiesti in ingresso ai convertitori c.c.-c.c. e
agli invertitori.
I raddrizzatori a semionda non controllato e controllato studiati nei precedenti paragrafi sono
convertitori c.a.-c.c. elementari, di valore più didattico che pratico essendo usati solo occasionalmente
per potenze molto piccole.
Raddrizzatori non controllati a gruppo di commutazione.
2006 - S.Bolognani, M.Zigliotto
26 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
La struttura base di un raddrizzatore polifase è mostrata in Fig.11 e prende nome di gruppo di
commutazione. In generale, un gruppo di commutazione non controllato polifase include q rami,
ciascuno costituito da un diodo D, connesso con il catodo in comune agli altri diodi, e alimentato
all'anodo da una delle q tensioni alternate di
alimentazione u1...uq.
Il principio con cui avviene la conversione c.a.-c.c. può
essere facilmente spiegato con riferimento alla Fig.11
b) ove è mostrato un sistema esafase (q=6) di tensioni
alternate sinusoidali u1. .u6. Si supponga di applicare
queste tensioni ai morsetti d'ingresso del gruppo di
commutazione e si ricordi che i diodi si comportano
praticamente come cortocircuiti quando sono in
conduzione (cioè percorsi da correnti positive), e come
circuiti aperti quando sono in interdizione (sottoposti a
tensione negativa: polarizzati negativamente). Si
supponga anche che il carico sia tale che la sua corrente
i è sempre diversa da zero (ciò richiede in pratica che il
carico abbia una dominate natura induttiva). Ne
discende che in ogni istante è in conduzione uno e uno
soltanto dei rami del gruppo di commutazione: se infatti
conducessero due o più diodi contemporaneamente, il
potenziale elettrico del punto A, comune a tutti i catodi
dei diodi, dovrebbe assumere simultaneamente valori
diversi, il che è assurdo. L'unica condizione possibile di
funzionamento, in presenza di un carico allacciato ai
Fig.11
morsetti di uscita del raddrizzatore è che in ogni istante
conduca uno solo dei diodi del gruppo, con tutti gli
altri interdetti. Questa condizione può essere soddisfatta solo se in ogni istante conduce il ramo
corrispondente alla tensione di valore positivo più alto. Considerando le forme d'onda di Fig.b),
nell'intervallo t0-t1 risulterà quindi in conduzione il ramo 3, corrispondente alla più positiva tra le
tensioni di alimentazione; nell'intervallo t1-t2 condurrà invece il ramo 4, in t2-t3 il ramo 5 ecc. Si
succedono quindi nella conduzione tutti i rami, con la stessa sequenza con cui si susseguono i picchi
positivi delle tensioni di alimentazione. In presenza di tensioni alternate sinusoidali e simmetriche,
ogni ramo conduce evidentemente, in ogni periodo, per un tempo pari T/q che in termini angolari
viene convenzionalmente posto pari a 2ε, con ε=π/q. Dal momento che la tensione di uscita Ud
coincide, istante per istante, con la tensione dei rami che vengono via via posti in conduzione, e cioè
con la più positiva tra tutte le tensioni d'ingresso, essa viene ad assumere la forma d'onda illustrata in
fig. c). È immediato osservare come tale tensione ud abbia un valor medio Ud non nullo: il
raddrizzatore attua dunque la desiderata conversione c.a.-c.c. Il valore medio della tensione continua
Ud prodotta dal convertitore può effettuarsi valutando l'area sottesa da ciascuno degli impulsi della
tensione Ud rapportandola alla durata dell'impulso stesso; Allo scopo si può fissare una variabile
angolare ϑ di integrazione con origine nel punto di massimo positivo di una delle tensioni di fase e
integrare fra π/2-ε e π/2+ε ottenendo la relazione fondamentale del gruppo di commutazione non
controllato:
Ud =
1
2π
π 2+ε
U M sin (ϑ ) dϑ =
q ∫π 2 − ε
UM
[− cos(ϑ )]ππ 22 +−εε = U M 2 sin (ε ) = U M sin (ε )
2ε
2ε
ε
(7)
Questa fornisce la tensione media d'uscita Ud del raddrizzatore in funzione del valore massimo UM
della tensione stellata d'ingresso e del numero q di rami del convertitore. Si osservi che al valore
continuo Ud della tensione d'uscita è sovrapposta una ondulalazione δu definita dalla differenza
2006 - S.Bolognani, M.Zigliotto
27 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
istantanea tra la tensione ud e il suo valore medio Ud. La frequenza fondamentale di questa
ondulazione è evidentemente pari a q*f (ove f è la frequenza delle tensioni alternate di alimentazione)
dato che in ogni periodo della tensione alternata d'ingresso si possono rilevare q impulsi della tensione
d'uscita. Il valore massimo dell'ondulazione di tensione δu,M (valore picco-picco) è dato da
δ u , M = U M − U m = U M (1 − sin (ϑi )) = U M [1 − cos(ε )]
(8)
Si ricava pertanto il valore del fattore di ondulazione della tensione d'uscita del raddrizzatore, detto
anche ripple di tensione, definito dalla relazione
ru =
1 δ u , M ε 1 − cos (ε )
=
2 Ud
2 sin (ε )
(9)
100
90
80
70
60
50
40
30
20
10
0
0
2
4
6
8
10
Il ripple dà una indicazione della qualità della forma
d'onda di tensione prodotta dal convertitore. Un
raddizzatore ideale, infatti, dovrebbe fornire una tensione
d'uscita perfettamente continua. L'ondulazione, sempre
presente nei convertitori reali, è invece indesiderata e
spesso si rendono necessari dei filtri per ricondurla entro i
limiti ammessi. La figura illustra (andamento in rosso)
l’andamento crescente della tensione media in uscita (in
percentuale della tensione massima di fase)in funzione del
numero di rami, secondo la (7). In nero, decrescente in
funzione di q, è riportato invece il ripple di tensione, come
percentuale del valore medio, secondo la (9).
---------------- ~ -------------Un altro fattore di grande interesse applicativo è il rapporto fra la tensione continua di uscita Ud e la
massima tensione inversa USM che sollecita i diodi del gruppo di commutazione. Quest'ultima è pari
al valore massimo della più grande fra le tensioni concatenate di ingresso: infatti ogni diodo, mentre è
interdetto, viene ciclicamente assoggettato a tutte le possibili differenze fra le tensioni d'ingresso. Si
consideri, a titolo d'esempio, il diodo D1 : quando conduce il ramo 2, esso è sottoposto a una tensione
inversa pari a u2-u1; quando conduce il ramo 3, ad una tensione pari a u3-u1 e così via. Si consideri la
tensione uq=UM sin(ϑ), a fase iniziale nulla, come riferimento. La i-esima tensione concatenata vale:
uq − ui = U M [sin (ϑ ) − sin (ϑ − 2 π i q )] = U M sin (ϑ ) [1 − cos(2π i q )] + U M cos (ϑ ) sin (2π i q )
(10)
Uguagliando a zero la derivata della (10) rispetto a ϑ, ponendo π/q=ε si ottiene l’angolo al quale
corrisponde la massima tensione concatenata sopportata dal diodo dell’i-esimo ramo:
(
)
d u q − ui
= U M cos (ϑ )[1 − cos (2 ε i )] − U M sin (ϑ ) sin (2 ε i ) = 0
dϑ
(11)
Si trova:
tg (ϑM ) =
1 − cos(2 ε i )
sin (2 ε i )
ed anche
sin (ϑM ) = cos (ϑM )
1 − cos(2 ε i )
sin (2 ε i )
(12)
Sostituendo la seconda delle (12) nella (10) si ottiene
2006 - S.Bolognani, M.Zigliotto
28 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
[1 − cos(2 ε i )][1 − cos(2 ε i )] + U cos(ϑ )sin (2 ε i ) =
M
M
sin (2 ε i )
[1 − cos(2 ε i )]2 + sin 2 (2 ε i ) = 2 U cos(ϑ ) [1 − cos(2 ε i )] = 2U cos(ϑ )tg (ϑ )
= U M cos(ϑM )
M
M
M
M
M
sin (2 ε i )
sin (2 ε i )
vers. 1.0
u q − ui = U M cos(ϑM )
(13)
Dunque la massima tensione concatenata che l’i-esimo diodo deve sopportare, fissato il numero di
rami q vale
(uq − ui )max = 2 U M sin (ϑM )
(14)
Fissato q, la procedura di determinazione della massima tensione inversa consiste nel calcolare ϑM
per ogni i∈[1…(q-1)] tramite la (12) e sostituirlo nella (14) per determinare in assoluto la tensione
inversa più elevata che un diodo deve sopportare nell’intervallo di conduzione [(π/2-ε)÷ (π/2+ε)]
relativo ad uq 4.
q=3
4
5
6
7
8
9
10
11
Tens. inv. max.
vs UM= 1.73
2
1.901
2
1.949
2
1.9696
2
1.9796
Diodo
D1
D2
D2
D3
D3
D4
D4
D5
D5
ϑM=60°
90°
72°
90°
77.14°
90°
80°
90°
81.81°
Si trova la tabella a lato. Dunque per un numero di
rami pari la massima tensione inversa è pari a due
volte la tensione massima di ramo. Allo stesso limite si
tende per un numero di rami dispari al crescere del
numero di rami stesso.
4
Il listato della funzione Matlab che permette sia il calcolo diretto che la verifica delle espressioni ricavate è il
seguente:
% Metodo di calcolo della massima tensione inversa
% sui diodi di un convertitore non controllato a gruppo di commutazione
clear
h=0;
q=11;
% numero di fasi
eps=pi/q;
deps=2*eps;
inf=pi/2-eps;
sup=pi/2+eps;
del=(sup-inf)/100;
for teta=inf:del:sup
h=h+1;
uq(h)=sin(teta);
for i=1:(q-1)
u(i)=sin(teta-i*deps);
te(i)=atan((1-cos(i*deps))/sin(i*deps));
maxi(i)=2*sin(te(i));
diff(h,i)=uq(h)-u(i);
end
end
[y,ris]=max(maxi)
%metodo della formula suggerita nelle dispense
ric=max(max(diff));
%metodo "dummy", provando tutte le combinazioni
end
2006 - S.Bolognani, M.Zigliotto
29 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
Esempi pratici di raddrizzatori non controllati a gruppo di commutazione
a) Raddrizzatore monofase a doppia semionda – La configurazione del raddrizzatore monofase a
doppia semionda è riportata in Fig. 12 a). Si tratta di un raddrizzatore a gruppo di commutazione con
q=2. Le due tensioni sfasate di 2π/q = π sono ottenute a partire da un’alimentazione monofase
mediante un trasformatore con secondario a presa centrale. La Fig. 12 b) mostra le principali forme
d’onda assumendo che il carico abbia un’induttanza sufficientemente grande da mantenere la corrente
nel carico stesso praticamente costante. I diodi conducono quando la tensione della porzione di
secondario ad essi collegata è maggiore dell’altra e quindi alternativamente per un’intera semionda.
La forma d’onda della corrente nel primario, e quindi nella linea di alimentazione, si ottiene
riportando a primario, tenedo conto del numero delle spire dei rispettivi avvolgimenti, le due correnti
nelle due porzioni di secondario. Si ottiene che la corrente di primario, nell’ipotesi assunta di corrente
costante lato continua, assume una forma d’onda quadra (non sinusoidale) sebbene l’alimentazione sia
formita da una tensione perfettamente sinusoidale. Ciò si esprime dicendo che un circuito
raddrizzatore è un carico distorcente, nel senso che alimentato da tensioni sinusoidali assorbe
correnti non sinusoidali che si possono ritenere costituite da una componente sinusoidale
isofrequenziale con la tensione (componente fondamentale o di prima armonica) e da una serie di
componenti a frequenza multipla di questa (componenti armoniche (superiori)). Nel caso in esame la
corrente di primario è costituita dalla componente fondamentale e da tutte le armonche di ordine
dispari (la cui frequenza è un mltiplo dispari di quella della fondamentale) la cui ampiezza è
decrescente con l’ordine stesso.
id=Id
D1
ia
+
ua1
L
-
ua
-
ua1
+
ud
ua2
ua2
ud
R
+
-
D2
id=Id
iD1
ia
b) Raddrizzatore trifase a stella – La configurazione del raddrizzatore trifase a stella è riportata in Fig.
13.
id=Id
D1
ia
+
ua1
L
-
ua
-
ua1
+
ud
ua2
+
D2
ua2
ud
R
-
id=Id
iD1
ia
2006 - S.Bolognani, M.Zigliotto
30 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
Raddrizzatori non controllati a ponte.
id=Id
ia
D1
D3
L
ua
+
ud
ua
ud
R
D2
D4
-
id=Id
iD1
ia
Raddrizzatori controllati a gruppo di commutazione.
Al fine di ottenere una regolazione della tensione continua prodotta dal convertitore è necessario
sostituire i diodi con altri dispositivi di cui sia possibile controllare gli istanti di chiusura e apertura.
La soluzione di gran lunga più diffusa, per la sua semplicità, economicità e affidabilità, impiega
tiristori in luogo dei diodi della Fig.11. Come è noto, i tiristori sono a tutti gli effetti equivalenti a
diodi la cui entrata in conduzione è condizionata dall'applicazione di un impulso di comando
all'elettrodo di controllo (gate) durante la condizione di interdizione con polarizzazione postiva: per
questo motivo, i tiristori vengono spesso anche indicati come diodi controllati. Nei convertitori a
tiristori il controllo della tensione d'uscita si ottiene semplicemente ritardando l’accensione di ogni
tiristore rispetto al suo istante di commutazione naturale, che è l'istante in cui il tiristore viene
polarizzato positivamente, con la tensione anodica superiore a quella catodica, cioè l’istante in cui, se
fosse un diodo non controllato, entrerebbe naturalmente in conduzione. Si indichi con α il ritardo di
accensione rispetto all'istante di commutazione naturale. Al variare di α la tensione media si riduce,
secondo l’espressione seguente:
U d ( α ) = U do cos (α )
(15)
dove Udo è la tensione media in assenza di parzializzazione, calcolabile con la (7). L’angolo di
parzializzazione α può essere variato solo nel campo 0≤
1
β ≤ π; infatti, al di fuori di questi limiti l'accensione dei
0 .8
π
ua
tiristori non può avvenire, in quanto riceverebbero
0 .6
ub
0 .4
l'impulso di comando in istanti in cui sono
0 .2
contropolarizzati, come si può osservare in Fig.12. In A
0
A
C
B
avviene la commutazione naturale tra uc ed ua. Se si
-0 .2
-0 .4
ritarda l’accensione di Da, in B ancora possibile la
-0 .6
commutazione, perché ua>uc. Se si aspetta fino a C si ha
-0 .8
ua<uc e pertanto il tiristore non entra in conduzione.
-1
0
1
2
3
4
5
6
7
L’espressione (15) è la relazione fondamentale dei
Fig.12
2006 - S.Bolognani, M.Zigliotto
31 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
raddrizzatori controllati, e descrive la dipendenza della tensione continua Uβ prodotta dal
convertitore, dal parametro di regolazione β. Variando β tra O e π, Uβ varia con continuità tra i limiti
-Udo ≤ Ud≤ Udo. I convertitori operanti sulla base di questo principio vengono spesso indicati come
convertitori a parzializzazione o convertitori a controllo di fase. E' importante osservare che per 0≤ α
≤π/2 la tensione media Ud è positiva. Per π/2 ≤ α ≤π essa è negativa. Invece la corrente i erogata al
carico non può cambiare di segno, stante l'unicità del verso di conduzione di diodi e tiristori. Ne
consegue che per 0≤ α ≤π/2 sia Ud che i sono positive, e dunque la potenza è effettivamente
trasmessa dalla rete alternata di alimentazione al carico: in queste condizioni il convertitore funziona
realmente da raddrizzatore. Nel campo π/2 ≤ α ≤π, invece, Ud è negativa, restando i positiva. La
potenza trasferita al carico è dunque negativa: ciò significa che in realtà il carico si comporta da
generatore e la potenza da esso erogata viene trasferita alla rete di alimentazione. E’ ovvio che tale
funzionamento può persistere solo se il carico è attivo, cioè in grado di erogare potenza, come per
esempio nel caso di una macchina in corrente continua funzionamente da generatore.
2006 - S.Bolognani, M.Zigliotto
32 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
Convertitori CC/CC - Principali configurazioni per azionamenti
I convertitori continua-continua (c.c./c.c., o chopper) sono dispositivi atti a convertire una tensione
continua in ingresso in una tensione pure continua d'uscita di valore diverso. Essi sono usati negli
azionamenti elettrici come alimentatori per i motori a corrente continua che necessitano di sorgenti di
tensione continua e variabile per il controllo delle principali grandezze elettriche e meccaniche. I
convertitori possono essere convenientemente classificati in base ai quadranti nel piano tensionecorrente in cui sono in grado di funzionare; in figura sono riportate le cinque principali classi di
funzionamento. Se il convertitore è in grado di produrre tensione unipolare e corrente unidirezionale,
entrambe positive, ha una regione di funzionamento confinata nel 1° quadrante Fig.(a); è questo ad
esempio il caso di un chopper abbassatore (buck converter o step-down chopper) che alimenti un
motore c.c. con unico senso di marcia e con coppia sempre positiva. Il termine abbassatore si riferisce
alla caratteristica del convertitore di trasferire energia elettrica da una sorgente a tensione più alta (in
questo caso la rete di alimentazione in c.c.) verso una a tensione più bassa. Una volta assunti positivi i
versi delle tensioni e delle correnti relative ai chopper funzionanti nel primo quadrante, si può passare
ad analizzare per simmetria i chopper funzionanti nel quarto quadrante Fig.(b), sempre riferendosi alla
loro funzione di alimentatori negli azionamenti elettrici. Una applicazione usuale è l'alimentazione di
un motore c.c. trascinato, funzionante dunque in un unico senso di marcia ma con coppia (e quindi
corrente di armatura) negativa. In tal caso il convertitore essenzialmente "si rovescia", ed ha la
funzione di trasferire energia elettrica da una sorgente a tensione più bassa (che ora è la tensione
media ai capi del motore) verso una sorgente a tensione più alta (la rete di alimentazione in c.c.; per
questo è detto convertitore elevatore (boost converter o step-up chopper). Come si è detto, il flusso di
energia sarà diretto dal carico (che trascina il motore) verso la rete di alimentazione; questo
funzionamento è detto rigenerativo; tale attributo si riporta talvolta anche al convertitore (chopper
rigenerativo). Sebbene la commutazione tra due circuiti funzionanti rispettivamente nel primo e
quarto quadrante sia un metodo soddisfacente, in qualche applicazione, per ottenere frenature di tipo
rigenerativo per motori con unico senso di marcia, talvolta (ad esempio nelle macchine utensili) sono
utilizzati circuiti che sono essenzialmente una combinazione dei due convertitori visti in precedenza;
si parla in tal caso di chopper a due quadranti Fig.(c). Una ulteriore possibile configurazione per i
chopper a due quadranti raggruppa i convertitori in grado di funzionare con corrente unidirezionale
ma con tensioni sia positive che negative Fig.(d). Circuiti di questo tipo non permettono
evidentemente di effettuare frenature di tipo rigenerativo, ma trovano la loro principale applicazione
nell'alimentazione dei circuiti di eccitazione dei motori c.c. ad eccitazione indipendente, o delle
macchine sincrone, quando siano richieste rapide inversioni di campo. Tali convertitori consentono
infatti il cortocircuito del circuito di campo che ne costituisce il carico, permettendo così un rapido
abbattimento della corrente. L'ultima configurazione è relativa al convertitore più completo, che è in
grado di operare in tutti i quattro
quadranti di funzionamento Fig.(e).
Esso prende il nome di chopper a
quattro quadranti, ed è utilizzato per
alimentare motori funzionanti in
entrambi i sensi di marcia, con
possibilità di frenatura rigenerativa
(ovvero con ritorno di potenza verso
l'alimentazione) per entrambe le
direzioni.
Classi di funzionamento dei convertitori c.c./c.c.
2006 - S.Bolognani, M.Zigliotto
A. Convertitore c.c./c.c.
abbassatore - funzionamento
continuo, carico Ea-L.
33 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
I convertitori abbassatori di tensione (detti anche buck converters o step-down choppers) vengono
usati quando si desidera trasferire energia da una fonte a tensione più elevata verso un carico a
tensione inferiore o al più uguale a quella presente all'ingresso del convertitore stesso. Se non è
richiesta l'inversione della corrente, nè della velocità, si può adottare (cfr.par.4.1) un chopper ad 1
quadrante, il cui schema di principio è riportato in Fig.13.
i1
U1
S
La
ia
ua
D
Ea
Fig.13 - Schema di principio del convertitore c.c./c.c. abbassatore
Nello schema S rappresenta un dispositivo elettronico di commutazione, che andrà scelto in base alle
specifiche di potenza e velocità di commutazione della particolare applicazione; si suppone che esso
sia in grado di condurre solo nel verso assegnato alla corrente i1. La sorgente di tensione continua
all'ingresso è stata denominata U1 e nel seguito della trattazione sarà ritenuta costante. Solitamente la
tensione d'ingresso U1 è ricavata tramite un convertitore c.a./c.c.; l'impiego di due convertitori in
cascata (c.a./c.c. e c.c./c.c.) è giustificato in quanto globalmente si ottiene un convertitore con banda
passante di molto superiore a quella dei semplici convertitori c.a./c.c., che rimane legata al periodo
della tensione di alimentazione. Il motore in c.c. è stato schematizzato con la serie di una induttanza
La e di un generatore di forza elettromotrice Ea ≤ U1; tensione e corrente ai capi di tale carico sono
stati denotati rispettivamente con ua ed ia, dove il carattere minuscolo sta ad indicare che si tratta di
grandezze variabili nel tempo. Il carico potrebbe anche essere resistivo, con un condensatore in
parallelo per livellare la tensione. Il parallelo RC può ancora essere considerato un bipolo con
tensione costante ai suoi capi. La differenza rispetto al caso precedente sta nel fatto che ora la
tensione dipende dalla corrente che attraversa il carico resistivo, mentre prima era costante ed
indipendente. In entrambi i casi, per spiegare il principio di funzionamento del circuito si può partire
da una condizione iniziale di riposo, in cui la corrente ia sia nulla ed S sia aperto. Alla chiusura di S il
diodo D (diodo di libera circolazione o free wheeling) si trova interdetto, dunque ai capi di La si
manifesterà una differenza di potenziale U1-Ea e la corrente ia inizierà a crescere linearmente, con
pendenza (U1-Ea)/La (Fig.14):
Fig.14 - Andamento della corrente ia con carico La-Ea
Se all'istante tON si riapre S, la corrente ia (che non può interrompersi bruscamente, essendo associata
ad una certa quantità di energia magnetica accumulata nell'induttore), si richiude attraverso il diodo
D. Se si assume che che nel periodo di durata costante (indicata con Tc in Fig.14) la corrente non si
annulli mai, (funzionamento continuo), la decrescita continuerà fino al termine del ciclo di
commutazione. Di seguito, S viene nuovamente comandato in chiusura per un intervallo di tempo
TON, e la corrente in La ricomincia a crescere, con la stessa pendenza del ciclo precedente. Il
2006 - S.Bolognani, M.Zigliotto
34 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
convertitore dunque funziona con una continua successione di fasi di conduzione di durata TON e di
interdizione di durata TOFF = Tc-TON. Il rapporto
δ =
TON
Tc
(16)
è detto duty cycle (meno usuale, ciclo utile); la tensione media Ua nel periodo Tc è data da:
T
U a = U1 ON = U1δ
Tc
(17)
Ci si può chiedere se il convertitore in esame, dopo una fase iniziale di transizione, giunga ad un funzionamento a
regime stabile, oppure se la crescita di ia proceda indefinitamente. Con riferimento al circuito di Fig.4.2.1, si
evince che la variazione di corrente ia in un periodo Tc vale:
T
ia (t + Tc ) − ia (t ) = c (U1δ − Ea )
La
(18)
e la condizione per cui la corrente ia si stabilizzi è dunque che il duty cycle δ venga regolato in modo che la
variazione indicata nella (18) si annulli, in modo che la crescita della corrente durante la chiusura di S sia
esattamente bilanciata da una equivalente riduzione durante la fase di apertura. Questo porta a concludere che, a
regime ed in funzionamento continuo, la tensione media Ua ai capi del carico deve coincidere con la fem Ea.
Gli andamenti della tensione e della corrente in funzionamento a regime sono riportati in Fig.15. A
regime, la tensione media ai capi del carico La-Ea coincide con la f.e.m. Ea5; si ha cioè:
Ea = U1δ ⇒ (U1 − Ea )TON = EaTOFF
(19)
che graficamente significa che le due aree A1 ed A2 di Fig.15(b) devono coincidere.
Fig.15 - Andamenti di tensione e corrente nel funzionamento continuo a regime
5
Infatti se non fosse così si localizzerebbe una tensione media non nulla ai capi dell’induttanza, entro la quale
allora la corrente crescerebbe (o calerebbe) indefinitamente.
2006 - S.Bolognani, M.Zigliotto
35 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
La corrente ia a regime (Fig.15(a)) presenta una ondulazione ∆ia,,la cui ampiezza è collegata al duty
cycle δ secondo la relazione
∆I a = ia, max − ia , min =
(U1 − Ea ) T
La
ON
U (1 − δ )
δ
= 1
La f
(20)
dove si è indicata con f=1/Tc la frequenza di ripetizione del ciclo del convertitore. L'andamento di ∆Ia
in funzione di δ è riportato graficamente in Fig.4.2.4, dalla quale emerge che si ha la situazione più
sfavorevole in corrispondenza di un duty cycle del 50%, per cui vale
∆I aM = ∆I a δ = 0.5 =
1 U1
4 La f
(21)
L'espressione (4.2.6) è utile in sede di progetto del convertitore per stabilire se l'induttanza propria del
motore sia sufficiente a contenere l'ondulazione di corrente (e dunque di coppia) entro le specifiche
dell'azionamento. Se così non fosse, si può intervenire sia aumentando la frequenza di commutazione
(che, naturalmente, ha pure un limite superiore, legato ai dispositivi di commutazione) o inserendo in
serie al circuito di armatura un induttore di opportuno valore.
Fig.16 - Andamento dell'ondulazione di corrente in funzione del duty cycle δ
Se per un momento si prescinde dalla realtà fisica del carico e si considera ideale ed indipendente il
generatore di f.e.m. Ea, si può notare come la corrente media Ia a regime dipenda solo dalla storia
passata, ovvero dalla successione dei diversi valori di δ che sono di seguito stati imposti al
convertitore per ottenere il desiderato valore della corrente stessa. In altre parole, a parità di Ea,
qualunque valore di corrente può essere ottenuto applicando per un determinato numero di periodi Tc
un δ opportuno, maggiore o minore di quello indicato dalla (4.2.4), a seconda che si desideri un
incremento o un decremento della corrente rispetto al valore attuale. Quanto detto vale naturalmente
nella ipotesi che il generatore sia ideale, mentre non vale se il carico è un parallelo RC.
A.1 Esercizio 1.
Si consideri il circuito di Fig.13, nel quale il generatore E sia sostituito da un carico resistivo R. Ai capi di R è
posto un condensatore in modo che la tensione Ur ai capi di R sia pressochè continua. Un opportuno circuito di
controllo regola il duty cycle δ in modo da mantenere Ur=5V al variare di U1 tra 10 e 40 V. La potenza minima
in uscita è Pmin=5W e il convertitore opera ad una frequenza costante di 50 kHz. Si considerino tutti i
componenti ideali e si calcoli il minimo valore di induttanza necessario a mantenere in funzionamento continuo il
convertitore in tutte le possibili condizioni operative.
Svolgimento. La forma d’onda della corrente a regime è riportata in Fig.15 a). Il limite di funzionamento
continuo si ha con ia,min=0. In questa condizione la corrente media sul carico può essere ottenuta a partire dalla
somma delle aree dei triangoli corrispondenti alla fase crescente e descrescente della corrente. La corrente
massima è espressa dalla (20) e vale
i a , max =
U 1 (1 − δ )
δ
La f
2006 - S.Bolognani, M.Zigliotto
36 di 38
Parte 3.1
Macchine ed Azionamenti Elettrici
vers. 1.0
La corrente media vale pertanto:
I a, m =
U1 (1 − δ )
U (1 − δ ) 1 U1 (1 − δ )
1 1
1
δ + (1 − δ )T 1
δ =
δ
δT
2
T 2
La f
La f
2 La f
L’andamento della corrente è funzione del duty cycle, con un andamento analogo a quello riportato in Fig.16. La
potenza minima indica che la corrente media minima deve valere Ia,min=Pmin/Ur=1A. Durante la variazione da
10 a 40 V il duty cycle varia come 5/U1. Sostituendo nell’espressione sopra si ha
I a, m =
5 (1 − 5 U1 )
2 La f
e pertanto si può dire che il valore minimo di corrente, a parità di altri elementi, si ha con U1=10 V. Si trova
allora il valore di induttanza desiderato:
La , min =
5 (1 − 5 U1 ) 5 (1 − 0.5)
=
= 25µH
2 I a, m f
2 1 * 50000
Filtri di linea per i convertitori CC/CC. - NON IN PROGRAMMA 2006-07
Finora ci si è occupati dell'analisi dei convertitori c.c./c.c. analizzando l'andamento di tensione e
corrente sul carico. Si è anche osservato che le ondulazioni di corrente, nelle pratiche applicazioni,
devono essere mantenute entro certi limiti, eventualmente aggiungendo in serie anche induttori
ausiliari. Anche supponendo di avere una corrente sul carico perfettamente livellata, l'assorbimento di
corrente dalla linea, il rimane comunque discontinuo. L'inquinamento armonico della linea di
alimentazione comporta parecchi effetti indesiderati, soprattutto in termini di fluttuazioni di tensione
e di interferenze tra diversi azionamenti. Recenti norme impongono che esso sia contenuto entro
precisi limiti, per cui risulta quasi sempre necessario frapporre tra il convertitore e la linea di
alimentazione un filtro LC opportunamente calcolato. Per il chopper step-down analizzato in
precedenza, il circuito risultante è riportato in Fig.27.
filtro d'ingresso
ig
Lf
i1
S
Cf
U1
La
ia
ua
Ea
D
Ig,n
Lf
Fig.27 - Step-down chopper con filtro di linea
Cf
I1,n
Circuito per l'analisi armonica
Agli effetti dell'analisi armonica, il convertitore c.c./c.c può essere schematizzato con un generatore di
correnti armoniche, che vengono ridotte dal filtro LC. La relazione che lega l'n-esima armonica Ig,n
assorbita dal convertitore con la corrente I1,n della linea di alimentazione è la seguente:
I g,n =
ZC,n
Z L, n + Z C , n
I1, n =
1
1 − n 4π f L f C f
2
2
2
I1, n =
1
1− n
2
(f
f r )2
I1, n
(38)
dove si è posto:
ZC , n =
1
= impedenza della capacità Cf alla frequenza nf
jn2πfC f
Z L , n = jn 2πfL f = impedenza dell'induttanza Lf alla frequenza nf
2006 - S.Bolognani, M.Zigliotto
37 di 38
Parte 3.1
fr =
Macchine ed Azionamenti Elettrici
vers. 1.0
1
= frequenza di risonanza parallelo del filtro LfCf
2π L f C f
La frequenza fr di risonanza parallelo del filtro deve essere tenuta ben diversa dalla frequenza di
commutazione del chopper, per evitare grandi armoniche di tensione anche a fronte di modeste
armoniche di corrente; solitamente si pone fr=f/(2÷3). Osservando l'ultimo membro della (1) si può
concludere che a parità di filtro un miglioramento si può ottenere aumentando la frequenza f di
commutazione del chopper, o equivalentemente adottando tecniche che a parità di f incrementino la
frequenza dell'ondulazione di corrente i1. In alternativa, se la frequenza di commutazione non può
essere variata, occorre diminuire la frequenza fr, scegliendo componenti Lf e Cf maggiori, con ovvio
incremento di ingombro e di costo.
Parallelo di convertitori c.c. - NON IN PROGRAMMA 2006-07
Molte applicazioni di grossa potenza richiedono convertitori con specifiche sulla corrente nominale
che superano largamente quelle relative ai singoli dispositivi di commutazione. Si pone di frequente il
problema se sia meglio porre in parallelo i singoli dispositivi, o se convenga invece porre in parallelo
più convertitori completi. Ciascuna soluzione ha pregi e difetti; porre in parallelo i singoli dispositivi
richiede una accurata selezione dei componenti per quanto attiene sia alle caratteristiche statiche che
dinamiche e obbliga ad un esasperata precisione nel lay-out dei componenti, perché le grandi correnti
in gioco sortiscono rilevanti cadute di tensione anche su resistenze molto piccole. Peraltro, nei sistemi
multi-convertitore (detti anche convertitori multifase) sorgono complicazioni di cablaggio, vi è
ridondanza per la componentistica di controllo e si rendono necessari induttori esterni addizionali.
2006 - S.Bolognani, M.Zigliotto
38 di 38