16. CAPITOLO 16
AERODINAMICA DELL’AUTOGIRO
Sia gli elicotteri che gli autogiri traggono portanza dall’uso di profili aerodinamici e quindi, molti dei
principi aerodinamici di base relativi alla produzione di portanza sono applicabili ad entrambi i
velivoli.
AUTOROTAZIONE
La differenza fondamentale tra l’autogiro e l’elicottero riguarda il verso secondo il quale il vento
relativo attraversa il rotore in condizioni di volo propulso dal motore. Infatti, nell’autogiro, il vento
relativo attraversa il disco del rotore dal basso verso l’alto, generando al tempo stesso le forze che
tengono in rotazione il rotore e quelle che provvedono al sostentamento aerodinamico; mentre,
nell’elicottero, il vento relativo attraversa il disco del rotore dall’alto verso il basso generando le
forze di sostentamento e quelle che provvedono alla trazione. In assenza della coppia motrice
prodotta dal motore, anche il rotore dell’elicottero deve poter operare come quello dell’autogiro,
ovvero in autorotazione, invertendo rapidamente il flusso dell’aria attraverso il rotore.
Vento Relativo
Direzione di volo
Vento Relativo
Direzione di volo
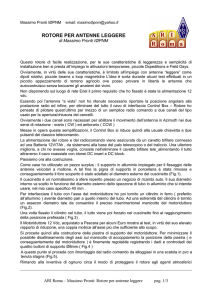
[FIG. 16-1] Il flusso d’aria attraverso il rotore di un autogiro è opposto a quello di un elicottero con motore
motore.
funzionante . Questo flusso d'aria è il modo in cui la potenza motore dell’autogiro viene trasferita al sistema rotore
per mantenere la rotazione
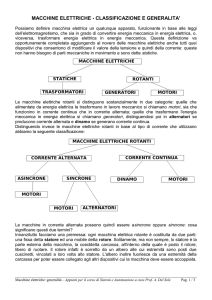
AUTOROTAZIONE VERTICALE
2 componenti basilari contribuiscono al vento
relativo che colpisce le pale durante
l’autorotazione verticale. [fig. 16-2 ]Una
componente, il flusso d’aria verso l’alto
attraverso le pale rotore, resta relativamente
costante in condizioni di volo definite. L’altra
componente è il flusso d’aria rotante , ossia la
velocità del vento attraverso le pale mentre
esse ruotano. Questa componente varia molto
in base alla distanza dal mozzo del punto in cui
si effettua la misurazione. Ad esempio,
Risultante
Vento Relativo
Flusso d’aria
verso l’alto
Vento dovuto alla
rotazione pale
consideriamo un rotore da 25 piedi di diametro [FIG. 16-2] In una autorotazione verticale, il vento derivato
e che operi a 300 rpm. In un punto che dista un dalla rotazione delle pale si combina con il flusso d’aria
piede dal mozzo le pale descrivono una verso l’alto per generare la risultante vento relativo che
circonferenza di 6.3 piedi . Questo equivale ad colpisce le pale
una velocità periferica di 31.4 piedi al secondo
ovvero 21mph. All’estremità della pala, la circonferenza descritta aumenta fino a 78.5 piedi.
Quindi, alle condizioni indicate di 300 rpm, la velocità periferica sale a 393 piedi al secondo
equivalenti a 267 mph. Il vento relativo risultante è di maggiore intensità, mentre l’angolo di
incidenza è inferiore che non alla radice della pala [fig. 16-3]
16 - 1
AUTOROTAZIONE VERICALE
Mozzo
Risultante
vento relativo
Flusso a salire
17 mph o 25 fps
Flusso rotante 21 mph o 31 fps
Pala
avanzante
Regione “trainante”
Velocità rotore : 300 r.p.m.
Estremità
Flusso a salire
17 mph o 25 fps
Flusso rotante 21 mph o 31 fps
[Fig. 16-3 ] Muovendosi verso l’esterno lungo la pala rotore, la velocità di
rotazione aumenta eccedendo la componente verso l’alto del flusso, il
risultato è un più alto vento relativo a un minore angolo d’incidenza
REGIONI DEL DISCO ROTORE
Risultante
vento relativo
AUTOROTAZIONE VERTICALE
Di stallo
Come per qualsiasi profilo aerodinamico, la
portanza generata dalle pale rotore è
perpendicolare alla direzione del vento relativo.
Dato che il vento relativo sulle pale rotore in
autorotazione varia da un alto angolo
d’incidenza all’interno a un basso angolo
d’incidenza all’esterno, la portanza ha un’alta
componente nel senso dell’avanzamento
nell’area
vicino
al
mozzo
ed
un’alta
componente
nel
senso
verticale
vicino
all’estremità. Questo determina che aree distinte
del disco rotore generino le forze necessarie al
volo autorotativo. [fig. 16-4] La regione
autorotativa , o “trainante” genera una forza
aerodinamica totale la cui componente
avanzante supera tutte le forze di resistenza e
mantiene in rotazione il rotore stesso. La regione
propulsa, o “trainata” , genera una forza
aerodinamica totale , la cui alta componente
verticale permette il sostentamento in aria
dell’autogiro. Vicino al mozzo, invece, vi è
un’area di stallo dove la componente del vento
relativo è così bassa che l’angolo d’incidenza
risultante è sotto il limite di stallo per il profilo
stesso. L’area di stallo crea una resistenza rispetto
alla direzione di rotazione che deve essere
compensata dalle forze avanzanti generate
dalla zona “trainante”.
Regione “Trainata”
Regione “Trainante”
Regione
Di stallo
Regione “trainata”
Regione “trainante” Regione di stallo
Pala stallata
(Elica)
(Autorotativa)
Forza AeroForza Aerodinamica tot.
dinamica tot.
Forza AeroDavanti allo
portanza
Dietro allo
dinamica
asse
di
rotaz.
Port.
Vento relativo
asse di rotaz.
totale
rotativo
Port.
resistenza
resistenza
resistenza
l. corda
Flusso verso alto
flusso
attraverso rotore
Risultante
Asse di
Asse di
vento rel.
rotazione
rotazione
flusso
Asse di
rotazione
[Fig. 16-4 ] La forza aerodinamica totale è davanti all’asse di rotazione
nella regione “trainante” . La resistenza supera la forza aerodinamica
nella regione di stallo.
AUTOROTAZIONE NEL VOLO AVANZANTE
Chiarito, per semplicità, il principio dell’autorotazione nell’ambito di un moto semplicemente
verticale, bisogna ora considerare, in maniera più attinente alla pratica del volo con l’autogiro, ciò
che accade quando il vento relativo che investe le pale ammette anche una componente di
traslazione. Questa componente non ha effetto sui principi aerodinamici che fanno ruotare le
pale, ma causa lo spostamento delle regioni del disco rotore. Effettivamente, quando l’autogiro si
muove in avanti nell’aria, la velocità d’avanzamento si aggiunge al vento relativo che colpisce la
pala avanzante, e si sottrae dal vento relativo che colpisce la pala retrocedente. Per evitare che si
creino forze impari sui lati del disco rotore, la pala avanzante oscilla verso l’alto riducendo l’angolo
16 - 2
d’incidenza, mentre la pala retrocedente oscilla verso il basso aumentando l’angolo d’incidenza e
la portanza. L’angolo d’incidenza minore della pala avanzante fa si che una maggior parte della
pala stessa sia da considerarsi nella regione “trainata”, mentre il maggior angolo d’incidenza della
pala retrocedente fa si che una maggior parte della stessa essa si trovi nella regione di stallo. Il
risultato è uno “slittamento” delle regioni verso il lato retrocedente del disco rotore
proporzionalmente alla velocità di avanzamento del velivolo [Fig. 16-5]
FLUSSO INVERSO
In un sistema rotore in volo avanzante il flusso
inverso si verifica vicino al mozzo sul lato
retrocedente del disco rotore. Questo è il
risultato della velocità d’avanzamento del
velivolo che supera la velocità di rotazione
delle pale. Per esempio , a 2 piedi di distanza
dal mozzo la pala descrive un cerchio di 12.6
piedi di circonferenza. A 300 rpm rotore la
pala , nel punto indicato, ha una velocità di
42 mph. . Se il velivolo si muove a 42 mph. La
velocità di avanzamento contrasta la
velocità di rotazione della pala retrocedente
nel punto in cui essa ruota alla stessa velocità
(quindi a 2 piedi dal mozzo). Quindi nella
pala retrocedente, nella parte compresa tra
il mozzo ed il punto a 2 piedi i distanza dallo
stesso, la velocità di avanzamento è
maggiore della velocità di rotazione in misura
crescente più ci si avvicina al mozzo. Ne
Direzione di volo
Pala
retrocedente
Regione “trainata”
Pala
avanzante
Regione
“trainante
[Fig. 16-5] Le regioni del disco rotore nel volo autorotativo
risulta che il flusso colpisce il bordo d’uscita
avanzante
della pala, con una velocità via via crescente
verso il mozzo del rotore [Fig. 16-6] LA dimensione dell’area soggetta a flusso inverso è determinata
primariamente dalla velocità di avanzamento del velivolo, velocità maggiori corrispondono a
maggiori dimensioni dell’area soggetta a flusso inverso. In qualche modo, anche la velocità di
rotazione del rotore ha un qualche effetto sulla dimensione dell’area, quando il rotore opera a
bassi giri risulta molto più soggetto al flusso inverso e soprattutto la porzione di pala soggetta è di
dimensioni maggiori.
STALLO DELLA PALA RETROCEDENTE
Lo stallo della pala retrocedente dell’autogiro
differisce da quello dell’elicottero dove si verifica
lontano da mozzo in una posizione compresa tra il
20% e il 40% piuttosto che all’estremità della pala.
Dato che l’autogiro opera in avanzamento, la
regione di stallo si accentra verso l’interno sulla
pala retrocedente [fig. 16-5] Aumentando la
velocità,
l’angolo
d’incidenza
della pala
retrocedente
aumenta
per
prevenire
la
dissimmetria di portanza e l’area di stallo si muove
verso l’esterno della pala retrocedente. Dato che
comunque la regione di stallo della pala è
piuttosto interna e non verso l’esterno della pala,
come sull’elicottero, si crea meno forza sul centro
di gravità del velivolo. Quindi anche se avvertite
un aumento di vibrazione non vi troverete ad
affrontare tendenza al beccheggio o al rollio.
FORZA DEL ROTORE
Come per qualsiasi velivolo più pesante dell’aria ,
vi sono 4 forze che agiscono su un autogiro in volo
che sono: portanza, peso, trazione e resistenza.
Volo avanzante
a 42 mph
Area soggetta a
flusso inverso
Velocità rotore 300
rpm,
[Fig. 16-6] Un area di flusso inverso si forma sulla pala
retrocedente nel volo avanzante come effetto della velocità di
avanzamento maggiore della velocità di rotazione delle pale.
16 - 3
L’autogiro ottiene la portanza dal rotore e la trazione direttamente dal motore attraverso
l’elica.[fig. 16-7]. La forza prodotta dal rotore dell’autogiro può essere divisa in 2 componenti:
portanza e resistenza del rotore. La componente della forza rotore perpendicolare al volo è la
portanza, la componente della forza rotore parallela al volo è la resistenza. Per ottenere la
resistenza totale del velivolo bisogna aggiungere alla resistenza del rotore la resistenza del corpo
del velivolo.
[Fig. 16-7]
Al contrario
di come agisce
nell’elicottero,
la risultante
della forza
rotore di un
autogiro in
volo
avanzante,
agisce
all’indietro
Portanza
Risultante
Portanza
Risultante
Trazione
Resist. Rot.
Trazione
Resist.
“corpo”
Resistenza
Risultante
Peso
Risultante
Peso
PORTANZA ROTORE
La portanza del rotore può essere visualizzata facilmente come la portanza necessaria per
sostenere in aria il peso del velivolo Quando un profilo aerodinamico produce portanza , si crea
anche della resistenza indotta. Il miglior angolo d’incidenza per un dato profilo è quello che
permette di avere la maggiore portanza e la minor resistenza. Tuttavia durante le varie evoluzioni
di volo il rotore non sempre opera con il miglior angolo d’incidenza per il profilo delle pale , Inoltre
il rotore deve mantenere un assetto nella gamma (bassa) che permetta l’autorotazione che
genera la portanza. Alcuni autogiri utilizzano piccole ali che generano portanza alle alte velocità.
La portanza generata dalle ali si somma o addirittura sostituisce la portanza generata dal rotore
generando meno resistenza indotta.
RESISENZA ROTORE
La resistenza rotore totale è la somma di tutte le resistenze che agiscono sul profilo in ogni posizione
della pala. La posizione di ciascuna pala contribuisce alla resistenza totale in base alla velocità e
all’angolo del profilo in tale posizione. Mentre le pale rotore ruotano, si verificano rapidi
cambiamenti sul profilo, in base alla posizione alla velocità del rotore ed alla velocità del velivolo..
Una variazione dell’angolo d’incidenza del disco rotore corrisponde ad un rapido e sostanziale
cambiamento nella resistenza totale del rotore. La resistenza rotore si può dividere in due
componenti: resistenza indotta e resistenza del profilo. La resistenza indotta è un prodotto della
portanza, mentre la resistenza del profilo è in funzione dei giri rotore. Dato che la resistenza indotta
è la resistenza generata dal rotore che crea portanza, possiamo considerare la resistenza del
profilo come la resistenza del rotore che non genera portanza. Per visualizzare la resistenza del
profilo considerate la resistenza che si deve vincere per prerotare fino agli rpm rotore idonei al volo,
ossia in una fase in cui il rotore non genera portanza. Questa situazione si può ottenere con un
sistema rotore con un profilo simmetrico e una capacità di variazione di passo mettendo le pale
ad angolo d’incidenza uguale a 0°. Un sistema rotore con un profilo asimmetrico ed un passo
predeterminato, come quello della maggior parte dei sistemi oscillanti amatoriali, non può essere
prerotato senza vincere anche una parte di resistenza indotta.
TRAZIONE
LA trazione di un autogiro è definita come la componente parallela al vento relativo della forza
totale dell’elica. Come tutte le forze che agiscono su un velivolo anch’essa agisce attorno al
Centro di Gravità. In base al punto d’applicazione della trazione una sua componente può
16 - 4
risultare normale al vento relativo e quindi agire in combinazione con la portanza o con il peso. In
volo , il corpo dell’autogiro è da considerarsi fondamentalmente come un grave sospeso al rotore,
e come tale è soggetto, come l’elicottero, all’azione pendolare1. A differenza dell’elicottero,
tuttavia, la trazione è applicata direttamente alla struttura anziché essere ottenuta attraverso il
sistema rotore. Ne risulta che le forze che agiscono su
un autogiro in volo sono diverse da quelle che
agiscono su un elicottero nelle stesse condizioni. Ad
esempio la coppia motore tende a far ruotare la
Coppia
struttura nella direzione opposta al senso di rotazione
applicata
dell’elica, il risultato è una rotazione del corpo di
all’elica
circa 2 gradi rispetto all’asse verticale [Fig. 16-8]
Questo leggero disassamento è normalmente
tralasciato e non è considerato rilevante per la
maggior parte delle normali operazioni di volo
STABILITÀ
Reazione del
“corpo” del
velivolo
La stabilità è uno degli obiettivi progettuali di un
velivolo per ridurre il carico di lavoro a cui il pilota è
[Fig. 16-8] – La coppia motore applicata all’elica ottiene
un’uguale ed opposta reazione del corpo , inclinandolo
sottoposto e per aumentare la sicurezza. Un velivolo
durante il volo di pochi gradi rispetto al piano verticale
stabile, come i tipici aerei da addestramento, richiede
meno attenzione da parte del pilota per mantenere
l’assetto di volo desiderato, anzi tende generalmente ad auto-correggere i disturbi derivati da
raffiche di vento o da altre forze esterne. Al contrario per mantenere sotto controllo un velivolo
instabile serve intensa e costante attenzione da parte del pilota. I fattori che contribuiscono alla
stabilità di un autogiro sono vari. Uno è il posizionamento dello stabilizzatore orizzontale. Un altro è
la posizione della resistenza del corpo rispetto al centro di gravità del velivolo. Un terzo fattore è il
momento di inerzia attorno all’asse di beccheggio, mentre un quarto è dato dalla relazione tra la
posizione della linea di spinta dell’elica e la posizione verticale del centro di gravità. Tuttavia il
fattore forse più critico è la relazione tra la linea di forza del rotore e la localizzazione orizzontale del
Centro di Gravità.
STABILIZZATORI ORIZZONTALI
Lo stabilizzatore orizzontale aiuta la stabilità longitudinale o di beccheggio. I fattori che ne
determinano la sua efficienza sono: le dimensioni della superficie e la sua distanza dal centro di
gravità, la velocità di volo e l’influenza del flusso dell’elica.
RESISTENZA DEL CORPO DEL VELIVOLO (CENTRO DI PRESSIONE)
Se il punto in cui si concentra la forza di resistenza del “corpo” del velivolo o il centro di pressione
delle forze, si situa dietro al CG, l’autogiro è generalmente considerato più stabile in particolare
intorno all’asse di imbardata, contribuendo a ciò l’adeguato dimensionamento di un superficie di
coda verticale. Tuttavia, per ottenere il miglior risultato, senza però compromettere il controllo
generale dell’apparecchio, deve prevedersi un adeguato bilanciamento del centro di pressione
longitudinale, in relazione all’autorità di comando del passo ciclico, in modo che quest’ultima sia
sufficiente, a qualunque velocità ad evitare che il naso si abbassi o si alzi mentre la pressione si
accumula sulla parte anteriore.
MOMENTO DI INERZIA INTORNO ALL’ASSE DI BECCHEGGIO
Si può affermare che, a parità di peso totale e di posizione del centro di gravità, l’ autogiro risulta
più stabile quanto più le masse sono piazzate lontano dal CG. Ad esempio se il sedile del pilota si
potesse muovere in avanti , allontanandolo dal CG, ed il motore si potesse muovere indietro,
allontanando anch’esso dal CG ma mantenendo invariata la posizione del CG stesso, si
otterrebbe un autogiro più stabile rispetto a quello di partenza. Gli acrobati che camminano sul filo
utilizzano lo stesso principio quando usano un lungo bilanciere.
16 - 5
LINEA DI SPINTA DELL’ELICA
Considerando solo la linea di spinta dell’elica, se tale linea si trova sopra al CG, l’autogiro avrà la
tendenza a picchiare quando si applica potenza, ed a cabrare quando si toglie potenza.
Ovviamente se la linea di spinta dell’elica si colloca al di sotto del CG vige l’opposto. Se la linea di
spinta dell’elica attraversa il CG o quantomeno si situa molto vicino ad esso, l’autogiro non avrà
tendenza a cabrare o picchiare durante le variazioni di potenza[Fig. 16-9]
BASSO PROFILO
ALTO PROFILO
Linea spinta elica
Linea spinta elica
Centro di gravità
Centro di gravità
[FIG: 16-9] – Un autogiro la cui linea di spinta dell’elica è sopra al CG viene spesso chiamato a BASSO PROFILO. Un autogiro la cui
linea di spinta dell’elica passa per il CG o si situa al di sotto dello stesso viene considerato ad ALTO PROFILO
FORZA ROTORE
Indipendentemente dall’adozione o meno di piani stabilizzatori orizzontali, la posizione del CG
rispetto alla linea d’azione della forza del rotore influenza la stabilità di beccheggio[Fig. 16-10].
Vediamo, infatti, quale sarebbe il comportamento del velivolo, nelle due diverse condizioni,
allorquando venga colpito da una raffica di vento frontale che incrementi considerevolmente la
forza aerodinamica del rotore:
• CG dietro la linea di forza del rotore.
Aumentando la forza del rotore, interviene un momento cabrante che, se non contrastato
dal pilota, produce un aumento dell’angolo di incidenza del rotore e quindi un aumento
ulteriore della forza stessa, ingenerando così una condizione di instabilità che richiede
necessariamente il continuo intervento sul comando di beccheggio;
• CG davanti alla linea di forza del rotore.
Aumentando la forza del rotore, interviene un momento picchiante che, senza l’intervento
del pilota, produce una diminuzione dell’angolo di incidenza del rotore e quindi una
diminuzione della forza aerodinamica stessa, contribuendo automaticamente alla stabilità
longitudinale.
16 - 6
CONDIZIONI TRIMMATE
Come già affermato prima, i costruttori usano una combinazione dei vari fattori di stabilità per
ottenere un autogiro trimmato. Ad esempio in un autogiro dove il baricentro è sotto la linea di
spinta, all’aumento della potenza ne risulterà un momento a picchiare, per compensare il quale, di
solito, si fa in modo che lo stesso baricentro sia situato dietro alla linea di forza del rotore, dato che
questa configurazione tende a dare un momento a cabrare.
Per contro, se il CG è sopra alla linea di spinta dell’elica, potrebbe risultare utile che si trovi anche
davanti alla linea di forza del rotore. Ovviamente la posizione della resistenza del corpo del
velivolo, l’inerzia d’assetto e le variazioni apportate dagli stabilizzatori orizzontali possono
modificare gli effetti stabilizzanti e/o destabilizzanti dovuti alla collocazione del baricentro,
risultando vitale per la sicurezza il rispetto dei limiti di manovra imposti dal Costruttore.
16 - 7