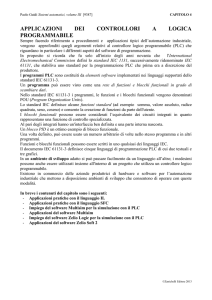
PLC
INTRODUZIONE
Il controllore a logica programmabile (PLC), apparso sul mercato nel 1969 su iniziativa
della General Motors, è un'apparecchiatura elettronica molto simile ad un calcolatore, in grado
di eseguire sequenzialmente un insieme ordinato di istruzioni scritte nella sua memoria, ma
che ha raggiunto un livello elevato di affidabilità nelle applicazioni industriali dove esistono
condizioni ambientali molto severe per la presenza di disturbi elettrici, alte temperature, shock
meccanici e sostanze inquinanti.
Il PLC sta assumendo il ruolo di componente fondamentale per la realizzazione della
fabbrica automatica.
Settori di applicazione che vedono ampia diffusione dei PLC sono:
macchine utensili;
industria automobilistica;
centri di lavorazione;
robotica;
acciaierie;
cementifici;
industria chimica e alimentare;
industria tessile;
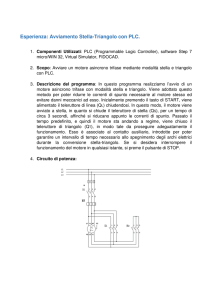
LOGICA CABLATA E LOGICA PROGRAMMATA
Un sistema usato per automatizzare una macchina o un impianto, qualunque sia la
tecnologia che si utilizza, è sempre costituito da tre parti fondamentali:
la sezione di ingresso
la sezione di elaborazione
la sezione di uscita.
Le sezioni di ingresso e di uscita svolgono prevalentemente il compito di adattare i
segnali elettrici che provengono dall'impianto e quelli che vanno a comandare gli apparati
azionatori.
Il controllo delle condizioni che consentono la sequenza di attivazione degli organi che
costituiscono la macchina è eseguito dall'automatismo, identificabile con la sezione di
elaborazione.
Gli automatismi si realizzano con tre tipi di tecnologie:
sistemi a logica cablata (di tipo elettromeccanico)
sistemi a logica cablata statica (di tipo elettronico)
sistemi a logica programmata (PLC)
I sistemi a logica programmata consentono una riduzione delle dimensioni ed una
maggiore flessibilità dell'impianto.
Il PLC è quindi economicamente competitivo soprattutto quando l'impianto è complesso
oppure è soggetto a frequenti modifiche: al variare delle specifiche di funzionamento, anziché
ricablare il quadro, è sufficiente riprogrammare il PLC. Il PLC, inoltre, si presenta molto
compatto e con ingombro ridotto, è un'apparecchiatura completamente statica, ovvero non
presenta organi meccanici in movimenti, e ciò si traduce in un'ottima affidabilità ed un'elevata
sicurezza di funzionamento.
CONFRONTO TRA PLC E PERSONAL COMPUTER
Il PLC lavora in tempo reale.
Il PLC è protetto da disturbi di natura elettromagnetica.
Nei PLC si pone molta più attenzione a quegli accorgimenti atti ad aumentarne la
robustezza dal momento che opereranno in ambienti industriali.
Il PC deve interagire con l'uomo per cui gli organi di ingresso ed uscita sono video,
tastiera, stampante ecc.. Il PLC, interfacciandosi soprattutto con sensori ed
attuatori, che forniscono e richiedono segnali elettrici, necessita di un hardware
particolare.
Il PC fa uso di linguaggi di programmazione ad alto livello mentre i PLC dispongono
di linguaggi di più facile interpretazione, con istruzioni e funzioni specifiche adatte ai
controlli industriali e molto vicine alla simbologia utilizzata nella stesura di schemi
elettromeccanici tradizionali.
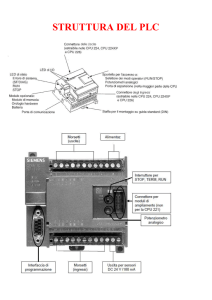
HARDWARE DEL PLC
Il PLC è fondamentalmete costituito da cique parti:
sezione CPU, cervello del sistema, che prende tutte le decisioni logiche;
sezione di MEMORIA, supporto fisico dove sono registrate le istruzioni che
costituiscono il programma applicativo e i dati necessari per funzioni ausiliarie;
sezione di INGRESSO, che riceve i segnali elettrici (digitali o analogici) provenienti
dall'impianto (finecorsa, pressostati, pulsanti, selettori ecc.);
sezione di USCITA, che riceve i segnali prodotti dall'elaborazione e li adatta per
comandare con potenze adeguate i vari organi attuatori (motori, elettrovalvole,
teleruttori, frizioni, visualizzatori, lampade, ecc. );
BUS, che consente la comunicazione tra le varie sezioni.
CPU
Legge lo stato dei segnali di ingressi provenienti dalla macchina da controllare ed esegue, in
sequenza, le istruzioni registrate in memoria. In base ai risultati dell'elaborazione, provvede ad
aggiornare lo stato delle uscite del sistema.
MEMORIA
In generale si può pensare suddivisa in 4 parti:
-2-
1)
Memoria per il programma utente:
contiene le istruzioni che costituiscono il programma. Come anche 2) e 3) è una
memoria di tipo RAM realizzata con tecnologia CMOS. Essendo una memoria
volatile, è necessario salvaguardare il contenuto nel caso di mancanza improvvisa
di tensione, per cui il PLC è dotato di una batteria tampone al litio.
2)
Memoria per le funzioni interne:
contiene i dati necessari all'elaborazione logica e alle funzioni ausiliarie
(temporizzatori, contatori e registri a scorrimento) e i risultati intermedi prodotti da
operazioni aritmetiche e logiche. Può essere per esempio necessario non trasferire
direttamente in uscita il risultato di una funzione logica, ma immagazzinare tale
valore in memoria per poterlo utilizzare come variabile di ingresso in altre equazioni
logiche.
3)
Memoria per lo stato degli ingressi e delle uscite:
questa zona ha un'allocazione di tipo statico, cioè i dati di I/O sono registrati
sempre negli stessi indirizzi. All'inizio di ogni ciclo di scansione viene registrata
un'immagine dello stato degli ingressi: tale fotografia delle condizioni di ingresso
rimane immutata per tutta la durata del ciclo e una eventuale variazione dello stato
di uno o più ingressi sarà rilevato solo all'inizio del ciclo successivo. Durante
l'esecuzione del programma i dati vengono elaborati dall'unità centrale ed i risultati
vengono memorizzati nella zona che contiene l'immagine dello stato delle uscite.
4)
Memoria per il software di sistema (sistema operativo);
il sistema operativo, contenuto in memoria ROM o EPROM, ha le seguenti funzioni:
diagnostica del sistema;
controllo della scansione e della durata del programma utente;
gestione della comunicazione per collegamento con altri PLC o perferiche.
L'estensione della memoria si misura in Kwords dove una word può essere di 8 o 16 bit.
- SEZIONI di I/O
Il PLC è un' apparecchiatura fortemente orientata all'interfacciamento con dispositivi
industriali. Le sue sezioni I/O sono costituite da convertitori che svolgono la funzione di
adattare i segnali provenienti dall'esterno e devono essere compatibili con una vasta gamma di
segnali elettrici, che vanno dai 5V continui ai 220V alternati, dai segnali analogici a quelli
digitali. I moduli hanno caratteristiche standard e si inseriscono negli slot per I/O presenti nel
rack del PLC. Questi moduli offrono una elevata sicurezza operativa garantita dall'isolamento
galvanico, ottenuto mediante optoisolatori, esistente tra i segnali esterni e la logica interna del
PLC (allegati ...............).
SOFTWARE DEL PLC
INTRODUZIONE
Il funzionamento del PLC è ciclico, cioè la CPU, per elaborare il programma, legge ed
esegue in sequenza le istruzioni, partendo dalla prima. Dopo l'elaborazione dell'ultima
istruzione, ricomincia da capo.
All'inizio di ogni ciclo di scansione la CPU interroga i segnali di ingresso e li registra nella
memoria immagine dello stato degli ingressi, in modo da creare una fotografia dello stato del
processo. Durante tutta l'elaborazione del programma tutte le interrogazioni sul valore degli
ingressi fanno riferimento a questa memoria immagine. In questo modo lo stato dei segnali di
ingresso si conserva inalterato per un intero ciclo di elaborazione, cosicché i cambiamenti di
segnale che si verificano durante il ciclo non possono creare disturbi.
I risultati prodotti dall'elaborazione durante il ciclo sono registrati temporaneamente nella
memoria immagine dello stato delle uscite. Solo al completamento del ciclo del programma il
contenuto della memoria immagine è trasferito alle corrispondenti unità di uscita.
Il tempo necessario per scandire un tutte le istruzioni del programma viene chiamato
tempo di ciclo, parametro importante per individuare la potenza di un PLC. Per poter
paragonare i tempi di ciclo di modelli diversi, ci si riferisce ad una lunghezza standard di un
programma di 1024 (2^10) locazioni di memoria: l'ordine di grandezza di questi tempi va da
-3-
qualche msec alle decine di msec.
SOFTWARE E LINGUAGGI
I PLC si avvalgono di linguaggi di programmazione specifici: non si utilizzano linguaggi ad
alto livello come FORTRAN, BASIC o PACAL perchè, pur facilitando la stesura dei programmi,
sono troppo lenti e non garantiscono una azione immediata tra istruzione e azione del
processo.
I costruttori americani utilizzano linguaggi che hanno una certa somiglianza con gli
schemi elettrici a relé ma con le due polarità verticali e gli elementi logici disposti su linee
orizzontali. Questi linguaggi si chiamano: schema a contatti, rete ladder (a scala) o KOP.
I costruttori europei propongono linguaggi che usano abbreviazioni mnemoniche delle
descrizioni delle funzioni, come in un listato assembler. Questi linguaggi vengono chiamati:
lista istruzioni o AWL.
SCHEMA A CONTATTI (KOP)
Questa simbologia rappresenta il modo con cui i contatti interni di un PLC vengono
associati allo stato dell'ingresso e non implica un'analoga corrispondenza con il tipo di contatto
usato esternamente; non è capace cioè di stabilire se un pulsante di ingresso è azionato
oppure no ma capire se l'ingresso è aperto oppure chiuso.
Il programma è una serie di linee orizzontali chiamate RUNG disposte tra due polarità
verticali la sinistra delle quali rappresenta il polo caldo (fase).
Il contatto ausiliario di un relé è identificato con un contatto NA che ha la stessa sigla
dell'uscita (funzione di memorizzazione).
- LISTA ISTRUZIONI (AWL)
Un programma è composto da una sequenza di istruzioni. Una istruzione è costituita da:
un codice operativo, che individua l'operazione;
un operando che indica il segnale sul quale occorre operare.
LISTA ISTRUZIONI
STR (LD)
STR NOT (LD NOT)
-4-
AND (AND)
OR (OR)
AND NOT (AND NOT)
-5-
OR NOT (OR NOT)
AND STR (AND LD)
OR STR (OR LD)
TEMPORIZZATORI
È una funzione interna di tutti i PLC.
I temporizzatori SIEMENS sono di cinque tipi diversi
• Impulso (SI)
• Impulso prolungato (SV)
-6-
•
•
•
Ritardo all’inserzione (SE)
Ritardo all’inserzione con memoria e reset (SS)
Ritardo alla disinserzione (SA)
La sua identificazione avviene tramite la lettera T.
IMPULSO (SI)
:U E 0.0
:L KT 500.0 si stabilisce il tempo
:SI T 1 lancio del temporizzatore
:NOP 0
:NOP 0
necessari per la conversione KOP-AWL
:NOP 0
:U T 1
si mette in AND il temporizzatore
:= A 1.0
L'impulso viene attivato sul fronte di salita dell'ingresso di lancio e dura per il tempo
impostato.
Se l'impulso dell'ingresso di lancio dura di meno del tempo stabilito, anche l'uscita torna subito
a zero.
IMPULSO PROLUNGATO (SV)
:U E 0.0
:L KT 500.0
:SV T 2
:NOP 0
:NOP 0
:NOP 0
:U T 2
:= A 1.0
Rispetto a SI cambia per il fatto che, anche se l'impulso di ingresso di lancio torna a zero, in
uscita il segnale continua per tutto il tempo stabilito.
RITARDO ALL’INSERZIONE (SE)
:U E 0.0
:L KT 500.0
:SE T 3
:NOP 0
:NOP 0
:NOP 0
:U T 3
:= A 1.0
Quando si attiva l'ingresso E 0.0, dopo un tempo stabilito si attiva il segnale.
-7-
RITARDO ALL’INSERZIONE CON MEMORIA E RESET (SS)
:U E 0.0
:L KT 500.0
:SS T 4
:NOP 0
:NOP 0
:NOP 0
:U T 4
:= A 1.0
Torna a zero solo con un impulso di reset; siccome utilizza il reset ci sono solamente due NOP
(per DU e DE).
RITARDO ALLA DISINSERZIONE (SA)
:U E 0.0
:L KT 500.0
:SA T 5
:NOP 0
:NOP 0
:NOP 0
:U T 5
:= A 1.0
DU rappresenta istante per istante la situazione del conteggio espressa in binario; DE
rappresenta istante per istante la situazione del conteggio espressa in BCD.
-8-