Università degli Studi RomaTRE
Corso di Laurea Specialistica in Ingegneria per la Protezione del
Territorio dai Rischi Naturali
curriculum Ambiente e rischio idrogeologico, orientamento qualità delle
acque
Dispense del corso di Modelli di
trasporto turbolento
A cura del Prof. Ing. Michele La Rocca
1
Introduzione
Premessa
La maggior parte dei flussi che si verificano in natura e nelle applicazioni ingegneristiche sono
turbolenti. Lo strato limite nell’atmosfera terrestre è turbolento, le correnti a getto nella parte
superiore della troposfera sono turbolente. Le correnti oceaniche (si pensi ad esempio alla corrente
del golfo) sono turbolente. Lo strato limite sull’ala di un aeroplano è turbolento. La maggior parte
dei processi di combustione sono turbolenti. Le correnti in pressione di liquidi e gas sono, nella
maggior parte dei casi, turbolente. Le correnti a superficie libera nei fiumi e nei canali artificiali
sono turbolente. In sostanza, nella meccanica dei fluidi il flusso turbolento è la regola, mentre
quello laminare l’eccezione.
E’ difficile dare una precisa definizione della turbolenza: piuttosto risulta di maggiore utilità
elencare alcune delle caratteristiche dei flussi turbolenti.
1. Irregolarità. La caratteristica più evidente dei flussi turbolenti è l’irregolarità temporale
e spaziale presentata da tutte le grandezze in gioco (velocità, pressione, temperatura
etc.).
2. Diffusività. Nei flussi turbolenti si riscontrano sempre scambi di quantità di moto,
calore e massa molto vigorosi. La tendenza a diffondere nei flussi turbolenti è infatti
molto maggiore rispetto a quelli laminari. Tale caratteristica è tra quelle di maggior
interesse nelle applicazioni: ad esempio negli scambi termici convettivi in cui il flusso è
turbolento l’efficienza dello scambio è notevolmente maggiore rispetto a quella che si
ottiene con uno scambio convettivo in cui il flusso è laminare.
3. Alti numeri di Reynolds. I flussi turbolenti si verificano sempre in corrispondenza di
ρU D
elevati numeri di Reynolds ( Re =
, ρ ≡ densità del fluido, U ≡ velocità caratteristica
µ
del fluido, D ≡ dimensione geometrica caratteristica, µ ≡ viscosità del fluido). Un flusso
turbolento è generalmente il risultato dell’evoluzione di un flusso laminare in cui, al
crescere del numero di Reynolds, piccole perturbazioni, anziché attenuarsi, evolvono
fino a determinare il comportamento turbolento. Tale comportamento instabile è il
risultato della complessa interazione tra forze di contatto viscose e forze di inerzia. Il
numero di Reynolds, come si avrà modo di vedere più oltre, rappresenta infatti il
rapporto tra l’ordine di grandezza delle forze di inerzia e l’ordine di grandezza delle
forze viscose.
4. Tridimensionalità e vorticità. I flussi turbolenti sono tridimensionali e caratterizzati da
alti livelli di vorticità. La tridimensionalità e la vorticità sono necessarie, poiché il più
importante meccanismo di alimentazione della turbolenza, consistente in una
proliferazione concatenata di vortici, si basa sul cosiddetto fenomeno del vortex
stretching, che non può sussistere nei flussi bidimensionali.
5. Dissipazione. I flussi turbolenti sono sempre dissipativi. L’azione dissipativa è operata
dagli sforzi viscosi, che sottraggono energia meccanica al flusso e la trasformano in
energia termica.
6. Scale spaziali e temporali. I flussi turbolenti sono caratterizzati dalla compresenza di
moti con differenti scale spaziali e temporali. In altre parole in un flusso turbolento sono
2
presenti contemporaneamente moti le cui dimensioni geometriche e i tempi caratteristici
sono molto differenti tra loro. In linea generale, nei flussi turbolenti si può distinguere un
moto a grande scala spazio-temporale, legato alle dimensioni geometriche del fenomeno
in esame, e un moto a piccola scala, indipendente, entro certi limiti, dal fenomeno in
esame. La compresenza di moti a grande e piccola scala può essere vista chiaramente
nelle scie e nelle correnti a superficie libera, soprattutto a valle di ostacoli, in cui si
osservano chiaramente numerosi vortici con dimensioni molto diverse tra loro.
E’ interessante osservare che per poter formulare una “diagnosi” di moto turbolento i caratteri sopra
elencati devono sussistere contemporaneamente. Si prenda ad esempio il caso dei moti ondosi che si
verificano sulla superficie del mare: si tratta evidentemente di un fenomeno caratterizzato da una
elevata irregolarità spazio-temporale, ma da trascurabili livelli di vorticità e dissipazione. Si
conclude pertanto che le onde marine non sono un fenomeno turbolento poiché, per quanto
caratterizzato da elevata irregolarità, non è né rotazionale, né dissipativo.
Sviluppo storico dello studio della turbolenza
La nascita della Dinamica dei Fluidi, come corpo organizzato di nozioni, avviene in Europa, nel
Rinascimento, con la scoperta delle leggi che regolano la statica dei liquidi. Le grandi opere
idrauliche realizzate principalmente nell’antichità, come ad esempio gli acquedotti romani, nei quali
senza dubbio il moto dell’acqua era turbolento, furono infatti costruite sulla base di conoscenze
basate sulla semplice osservazione empirica. Le prime ricerche sulla Dinamica dei Fluidi e sulla
Turbolenza si fanno risalire convenzionalmente a Leonardo da Vinci (1452-1519), il quale si può
considerare l’iniziatore dello studio sperimentale della turbolenza, poichè nei suoi codici si trovano
note e disegni relativi ad osservazioni da lui fatte sui corsi d’acqua, in cui il moto è appunto di
regola turbolento. Nei disegni di Leonardo le strutture vorticose vengono riprodotte fedelmente e
descritte qualitativamente. In particolare, la superficie di un corso d’acqua a valle della pila di un
ponte è così sinteticamente ma efficacemente descritta:
Nel moto dell’acqua coesistono due tipi di vortici: il primo è causato dalla corrente principale,
mentre il secondo, intermittente, da correnti che da essa si separano.
Leonardo, basandosi su osservazioni personali, aveva evidenziato la struttura dei vortici
intermittenti di Von Karman, che si verificano appunto attorno agli ostacoli immersi in correnti, e la
compresenza di differenti scale spaziali. In altre parole, Leonardo può essere considerato il primo
ricercatore ad avere impiegato la tecnica della visualizzazione nello studio sperimentale della
turbolenza, pur non avendo egli chiaramente e consapevolmente distinto il regime di moto
turbolento da altri regimi di movimento. Si deve infatti attendere la fine del XIX secolo, allorché
Osborne Reynolds distinse chiaramente i regimi di movimento laminare e turbolento di una corrente
in pressione tramite un celebre esperimento. Nel frattempo la teoria dei fluidi ideali, che aveva
raggiunto un notevole grado di sviluppo a partire dal XVII secolo, aveva iniziato a mostrare i suoi
limiti in misura sempre maggiore. La ragione di ciò va vista nel fatto che nel progetto delle strutture
che interagivano con i fluidi (condotte, componenti di macchine, etc.) sempre maggiore importanza
rivestiva la corretta valutazione delle forze resistenti, impossibile a farsi con la teoria dei fluidi
ideali. Il passo decisivo venne fatto da Ludwig Prandtl (1875-1953) che elaborò la teoria dello strato
limite ed è per questo considerato il fondatore della moderna fluidodinamica. Lo sviluppo
dell’aeronautica si deve sostanzialmente a questa teoria.
Parallelamente l’evoluzione delle tecniche sperimentali diede un grosso impulso allo sviluppo della
Dinamica dei Fluidi. La svolta decisiva si ebbe negli anni 30’ del XX secolo con l’introduzione
dell’anemometro a filo e film caldo, che permetteva di effettuare misure di turbolenza
rispettivamente in aria e acqua, notevolmente più accurate e precise rispetto a quanto fatto in
precedenza. Basandosi sulle misure effettuate con tale strumento, Taylor fu in grado, nel 1935, di
3
proporre la sua teoria statistica della turbolenza omogenea ed isotropa (una sorta di “turbolenza
ideale”) di fondamentale importanza. A questa seguì la teoria statistica della turbolenza localmente
isotropa, proposta da Kolmogorov (1941). Tale teoria poteva essere applicata a flussi turbolenti
reali: strati limite, correnti in pressione, correnti a superficie libera, getti, scie ed anche a flussi
geofisici (correnti atmosferiche ed oceaniche).
Immediatamente dopo la seconda guerra mondiale, la turbolenza libera, che si origina a valle di
griglie, getti e scie, continuò ad essere studiata teoricamente e sperimentalmente da Taylor e dai
suoi allievi Batchelor e Townsend. Negli anni 50’ del XX secolo, le indagini sperimentali vennero
estese ai flussi di strato limite e alle correnti in pressione.
Gli anni 60’ del XX secolo possono essere visti come l’età d’oro delle misure puntuali della
turbolenza, basate sugli anemometri a filo caldo e i trasduttori di pressione. In quel periodo i
risultati che si ottenevano erano così incoraggianti da far ritener che in breve tempo il problema
della turbolenza sarebbe stato risolto teoricamente e sperimentalmente per mezzo degli strumenti
statistici tradizionali, come l’analisi delle correlazioni spazio-temporali e l’analisi spettrale.
Tuttavia, tra gli anni 60’ e 70’ del XX secolo, le più importanti scoperte sulla turbolenza vennero
fatte non grazie all’analisi quantitativa di misure puntuali, ma grazie alle osservazioni qualitative
realizzate per mezzo di tecniche di visualizzazione. Si ritornava così al punto di partenza, alla
nascita della ricerca sperimentale sulla turbolenza dovuta a Leonardo da Vinci e ad Osborne
Reynolds: entrambi infatti avevano effettuato le loro ricerche per mezzo di visualizzazioni del
flusso e descrizioni qualitative di esso.
Un significativo impulso alle ricerche sulla turbolenza venne dato dal progresso della
fluidodinamica numerica avutosi con l’avvento dei calcolatori ad alta velocità. In particolare,
sempre durante gli anni 70’ del XX secolo, il gruppo di ricerca facente parte dell’Imperial College
sviluppò i modelli di turbolenza a più equazioni, basati sulla teoria statistica della turbolenza: il
modello κ−ε, lo algebraic stress model e il full stress model. Il limite principale di tali modelli
consiste nell’impossibilità di descrivere le strutture turbolente aventi scale spaziali differenti da
quella del moto medio. A tale scopo, all’inizio degli anni 80’ del XX secolo, venne sviluppata la
tecnica Large Eddy Simulation (LES), in grado ampliare la gamma di scale spaziali simulate
numericamente. Alla fine degli anni 80’ del XX secolo, venne poi introdotta la Direct Numerical
Simulation che risolve le equazioni di Navier Stokes così come sono, senza introdurre alcuna ipotesi
sulla turbolenza. Tale tecnica richiede calcolatori di elevatissima potenza e ha finora prodotto i
risultati più interessanti, in ottimo accordo con osservazioni sperimentali fondamentali.
Gli ultimi sviluppi della ricerca sperimentale sulla turbolenza riguardano l’introduzione
dell’anemometria laser doppler, che ha permesso un decisivo passo in avanti, soprattutto per quanto
riguarda le misure in acqua.
Dal punto di vista numerico, la simulazione diretta costituisce l’approccio più interessante alla
turbolenza, ma anche quello che fornisce (per ora) risultati di scarso interesse pratico, anche a causa
della difficoltà nella elaborazione della immensa mole di risultati che produce. I modelli di
turbolenza a più equazioni, basati sull’approccio statistico, e la tecnica LES sono pertanto tuttora di
grande interesse, proprio per la loro maggiore versatilità.
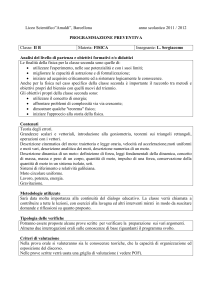
Un interessante schema dello sviluppo storico della ricerca sulla turbolenza nel XX secolo è
presentato in Figura 1:
4
Figura 1. Schema dello sviluppo storico della ricerca sulla turbolenza.
5
Origine della turbolenza
Al crescere del numero di Reynolds, un flusso laminare diviene instabile: di conseguenza le
inevitabili perturbazioni ad esso imposto crescono ed evolvono fino a distruggere la struttura del
moto laminare e a determinare il tipico comportamento turbolento. Il comportamento instabile si
manifesta in corrispondenza di numeri di Reynolds ben determinati e solitamente abbastanza
“grandi” (Re>>1). Le correnti in pressione, ad esempio, manifestano un comportamento
marcatamente instabile e tendono a mostrare i caratteri turbolenti a partire da numeri di Reynolds
(calcolato con la velocità media della corrente, il diametro della condotta e la densità e viscosità del
fluido) pari a circa 2000. La persistenza ed il pieno sviluppo del regime turbolento sono favoriti
dalla presenza di gradienti di velocità trasversali alla direzione principale del moto. E’ stato
sperimentalmente verificato (una corrente uniforme turbolenta d’aria che entra in un ambiente
calmo) che se il flusso turbolento arriva in un ambiente nel quale non c’è presenza di gradienti di
velocità trasversali alla direzione principale del moto, la turbolenza, decade gradualmente e il flusso
ritorna laminare. Nelle condotte in pressione, ad esempio, la presenza del gradiente di velocità
trasversale alla direzione principale del moto è legata alla differenza di pressione per unità di
lunghezza della condotta. Analogamente, nelle correnti a superficie libera, la presenza del gradiente
di velocità trasversale alla direzione principale del moto è legata alla inclinazione della corrente
rispetto al piano orizzontale. In questi esempi la differenza di pressione per unità di lunghezza della
condotta e l’inclinazione della corrente rispetto al piano orizzontale costituiscono la sorgente di
energia del moto, sia che avvenga in regime laminare che in regime turbolento.
Da un punto di vista matematico, la descrizione dettagliata della transizione dal flusso laminare al
turbolento è un problema molto complesso, che può essere risolto solo nell’ambito di una teoria
linearizzata, valida per perturbazioni infinitesime e quindi non adatta a trattare le fluttuazioni di
ampiezza finita che si riscontrano nella transizione alla turbolenza.
Le evidenze sperimentali hanno messo in luce il fatto che talora la transizione inizia da un
meccanismo di instabilità primario, che nella maggior parte dei casi è bidimensionale. L’instabilità
primaria genera moti secondari tridimensionali e instabili, che possono presentarsi come intensi
disturbi localizzati (i cosiddetti turbulent spots) in posizioni ed in istanti casuali. Tali disturbi
appaiono e scompaiono rapidamente. Se la frequenza spazio-temporale delle loro apparizioni
aumenta, tendono ad unirsi gli uni agli altri e ad evolvere gradualmente nella turbolenza
pienamente sviluppata.
Diffusività della turbolenza
Come detto in precedenza, una delle principali caratteristiche dei flussi turbolenti, consiste nella
capacità di trasportare e diffondere quantità di moto, energia cinetica, calore, sostanze inquinanti e
contaminanti e particelle solide. La tendenza alla diffusione in un flusso turbolento è molto
maggiore di quella che si ha in un flusso laminare, dovuta alla sola diffusione molecolare.
A tal proposito è interessante considerare, a titolo di esempio, una camera di forma cubica (per
semplicità) di lato L, piena d’aria, in cui sia installato un elemento riscaldante. Se non vi è alcun
movimento d’aria nella camera, il calore si diffonde per diffusione molecolare e il processo è
governato dalla equazione di diffusione del calore:
∂ 2θ ∂ 2θ ∂ 2θ
∂θ
= γ 2 + 2 + 2
∂t
∂y
∂z
∂x
(1)
in cui θ è la temperatura, γ è la diffusività termica dell’aria, t è il tempo e x,y,z le coordinate spaziali
rispetto ad un sistema di riferimento cartesiano ortogonale. L’equazione (1) può essere risolta
analiticamente, con appropriate condizioni iniziali e al contorno. Da un punto di vista dimensionale
però, detto ∆θ un opportuno intervallo di temperatura e Tm un intervallo tempo, si può porre che:
6
∆θ
∆θ
∝γ 2
Tm
L
(2)
da cui si deduce che l’intervallo di tempo Tm, durante il quale la temperatura della camera subisce
un incremento pari a ∆θ , ha un ordine di grandezza pari a:
Tm =
L2
(3)
γ
Si assuma una dimensione geometrica caratteristica L=5 m. La diffusività termica del fluido è data
dalla formula:
γ=
K
ρC
(4)
in cui K è la conduttività termica, ρ la densità e C il calore specifico a pressione costante del fluido
(l’aria). Si può ipotizzare che l’aumento di temperatura sia piccolo e che di conseguenza le
grandezze fisiche caratterizzanti il fluido restino costanti: assumendo per queste ultime i valori
corrispondenti ad una temperatura ambiente di 20° centigradi si ha:
2
J
W
Kg
−5 m
=
=
⇒
≈
×
ρ
1
205
1012
γ
2
10
,
C
,
.
KgK
m3
mK
s
κ = 0.0255
Di conseguenza l’intervallo di tempo Tm risulta pari a:
Tm ≈ 1.25 × 106 [s ]
pari a circa 350 ore. Per far aumentare di qualche grado centigrado la temperatura dell’aria sono
dunque necessari, in condizioni di aria ferma, quasi quindici giorni! Si può dedurre che la diffusione
molecolare costituisce un meccanismo piuttosto inefficace nel distribuire il calore in un dato
ambiente.
La presenza di un moto convettivo dell’aria, innescato dalle differenze di densità, rende il processo
di distribuzione del calore estremamente efficiente. In tal caso infatti il tempo caratteristico del
fenomeno viene a coincidere con il tempo caratteristico del moto. Quest’ultimo, detto U l’ordine di
grandezza della velocità dell’aria, è stimato dalla:
Tt =
L
U
(5)
Nella camera vi saranno zone con velocità maggiore e zone con velocità minore: un valore
ragionevole dell’ordine di grandezza della velocità dell’aria può essere assunto pari a 0.05 m/s. In
tal modo il tempo caratteristico si riduce a Tt = 100 [s ] , ossia poco meno di due minuti. Il rapporto:
Tm UL
=
Tt
γ
(6)
7
è detto numero di Peclet (Pe). Nel caso in esame vale all’incirca Pe ≈ 1.25 × 10 4 . Poiché per i gas il
rapporto tra diffusività termica e viscosità cinematica ha ordine di grandezza unitario (
numero di Reynolds del caso in esame: Re =
UL
ν
∝ 1 ), il
γ
avrà lo stesso ordine di grandezza del numero di
ν
Peclet e si può quindi dedurre che il moto convettivo considerato sia turbolento. In conclusione, è
interessante vedere come l’influenza della turbolenza consista in una drastica riduzione dei tempi
necessari alla diffusione delle grandezze fisiche, cioè in un drastico aumento della diffusività.
Questo aspetto è alla base di molti approcci modellistici, nei quali la turbolenza è tenuta in conto
aumentando in modo opportuno i coefficienti di diffusività (termica, della quantità di moto etc.). In
tali approcci il coefficiente di diffusività non è più una caratteristica fisica del fluido, ma dipende
dal campo di moto. Si parla allora di eddy diffusivity, ossia di “diffusività del vortice”, intendendo
con ciò dire che il coefficiente di diffusività adottato deve essere scelto in modo tale che la scala dei
tempi del moto turbolento da rappresentare sia pari a quella del processo di mescolamento
esaminato. E’ chiaro che l’ eddy diffusivity è da considerarsi un artificio modellistico che può, più o
meno fedelmente, rappresentare gli effetti della turbolenza.
Scale spaziali nei flussi turbolenti
Come già detto in precedenza, i moti turbolenti sono caratterizzati da una molteplicità di scale
spaziali, limitate superiormente dalle dimensioni geometriche del dominio del flusso e
inferiormente dalla azione diffusiva della viscosità molecolare.
Le dimensioni geometriche del dominio (ad esempio il diametro di una condotta) caratterizzano i
cosiddetti moti di larga scala, i quali sono in grado di generare, tramite una vera e propria “cascata”
di energia, moti caratterizzati da scale spaziali via via più piccole. I processi dissipativi sono
trascurabili finché l’ordine di grandezza della scala spaziale del moto non scende al di sotto di un
certo valore: in altre parole sono i moti caratterizzati dalle scale spaziali più piccole ad essere
responsabili della dissipazione di energia.
I moti a piccola scala spaziale sono anche caratterizzati da piccole scale temporali e statisticamente
indipendenti dai moti turbolenti a grande scala spaziale e temporale. In pratica, i moti a piccola
scala dipendono esclusivamente dalla quantità di energia loro fornita dal moto a grande scala,
tramite il processo della “cascata”, e dalla viscosità cinematica.
Si può avere un’idea delle differenze tra gli aspetti della turbolenza a piccola e a grande scala
mettendo in relazione la quantità di energia dissipata a causa della viscosità per unità di volume e di
tempo ε alle scale spaziali e di velocità della turbolenza a grande scala: a tal proposito è ragionevole
assumere che i moti a grande scala trasferiscano energia ai moti a piccola scala in un tempo
caratteristico pari a quello dato dalla (5): L/U, essendo U , L rispettivamente la scala delle velocità e
spaziale dei moti turbolenti a grande scala. L’energia cinetica per unità di massa dei moti a grande
scala è pari a:
Ec =
U2
2
(7)
Pertanto la potenza per unità di massa fornita ai moti a piccola scala tramite il processo della
“cascata” di energia risulta pari a:
Ec U 3
=
Tt
2L
(8)
8
Tale potenza, per ovvie ragioni di bilancio energetico, deve eguagliare la potenza dissipata dalla
viscosità per unità di volume e di tempo ε:
ε≈
U3
2L
(9)
E’ importante osservare che la potenza (8) viene dissipata direttamente per l’azione della viscosità
solo quando sono presenti moti caratterizzati da scale spaziali sufficientemente piccole. Infatti, il
tempo necessario affinché il moto a grande scala dissipi energia direttamente per viscosità è fornito
dalla (3), coincide cioè con il tempo caratteristico della diffusione molecolare ed è pertanto molto
elevato, come è stato visto in precedenza: in altre parole la dissipazione viscosa avviene molto
lentamente nei moti a grande scala. Tale fatto può essere messo in evidenza considerando che la
quantità di energia dissipata per viscosità nei moti a grande scala per unità di tempo e di massa è
pari a:
ν U2
2
L
2
=
ν U3
UL 2 L
=
1
ε
Re
(10)
infatti l’energia Ed in questione è pari al prodotto della forza viscosa per lo spostamento e la forza
U 2
viscosa è pari al prodotto dello sforzo viscoso per l’area: E d = ρν
L × L . D’altra parte si deve
2L
U 2
L ×L
ρν
Ed
U2
1
L
2
=
=ν 2 =
ε.
dividere l’energia Ed per l’intervallo di tempo e per la massa:
L 3
Tc M
Re
2L
ρL
U
Quindi, per Re>>1, la potenza dissipata per viscosità nei moti a grande scala per unità di tempo e di
massa è una frazione di quella trasferita ai moti caratterizzati da scale spaziali più piccole che viene
successivamente da questi dissipata; il processo di dissipazione dell’energia avviene infatti con
scale temporali decrescenti al decrescere delle scale fino a divenire praticamente immediato in
corrispondenza delle scale più piccole. Una stima dell’ordine di grandezza delle scale spaziali e
temporali dei moti di piccola scala è data dalle microscale di Kolmogorov:
14
ν 3
η =
ε
12
ν
=
τ
ε
(11)
dalle quali si ricava la scala delle velocità dei moti di piccola scala:
u=
η
14
= (νε )
τ
Il numero di Reynolds definito come:
(12)
uη
ν
è unitario: i moti caratterizzati dalle scale di Kolmogorov
sono dunque laminari per definizione e dunque dominati dalla viscosità.
È interessante considerare i rapporti:
9
η ν 3 4
−3 4
= Re
=
L UL
12
τ
ν
−1 2
= Re
=
Tm UL
14
u
= ν = Re −1 4
U UL
(13)
tra le microscale di Kolmogorov e le macroscale (caratterizzanti i moti a grande scala). Si vede
chiaramente come la separazione tra le scale aumenti all’aumentare del numero di Reynolds, così
che le assunzioni sulla indipendenza statistica dei moti a piccola scala da quelli a grande scala
risultano via via più realistiche.
La differenza tra due moti turbolenti, caratterizzati dalla medesima scala spaziale L ma da differenti
numeri di Reynolds, consiste nel fatto che al numero di Reynolds più basso corrisponde un moto a
piccola scala con scala spaziale maggiore di quella relativa al moto caratterizzato dal maggiore
numero di Reynolds.
Elevando al quadrato la terza delle (13) si ottiene il rapporto degli ordini di grandezza delle energie
cinetiche dei moti a piccola e grande scala:
2
12
u ν
=
U UL
= Re −1 2
(14)
che mostra come l’energia cinetica del moto a grande scala sia molto maggiore di quella del moto a
piccola scala.
Si consideri infine che è possibile caratterizzare l’intensità di un vortice con una frequenza, avendo
la vorticità le stesse dimensioni fisiche dell’inverso di un tempo. Pertanto i vortici associati alle
piccole scale spaziali e temporali sono caratterizzati da elevate frequenze, mentre i vortici associati
alle grandi scale spazio-temporali sono caratterizzati da basse frequenze caratteristiche. Il rapporto
degli ordini di grandezza delle vorticità dei moti a piccola e a grande scala è dato pertanto
dall’espressione:
τ
Tm
−1
ν
=
UL
−1 2
= Re1 2
(15)
I fatti sopra accennati si esprimono sinteticamente dicendo che nei moti turbolenti la maggior parte
della energia cinetica è associata ai moti a grande scala, la maggior parte della vorticità ai moti a
piccola scala.
10
Capitolo I. Le equazioni di Reynolds
Medie d’insieme e medie temporali
La caratteristica più saliente dei moti turbolenti consiste nel fatto che i valori delle grandezze di
campo (velocità, pressione, temperatura, concentrazione di contaminanti etc.) fluttuano
caoticamente nel tempo: è pertanto intuitiva l’idea di affrontare lo studio della turbolenza con i
metodi della statistica. A tal proposito si consideri di effettuare, in un punto appartenente ad un
dominio fluido interessato da un moto turbolento, la misura di una grandezza di campo. Per fissare
le idee si può pensare alla misura della componente di velocità u in un punto all’interno di una
corrente a superficie libera. La misura viene effettuata per un tempo T e ripetuta un certo numero di
volte N, a partire dalle medesime condizioni iniziali.
11
10,8
10,6
10,4
u [m/s] 10,2
10
9,8
9,6
65
97
89
81
73
Tempo [s]
57
49
33
41
17
25
9
1
9,4
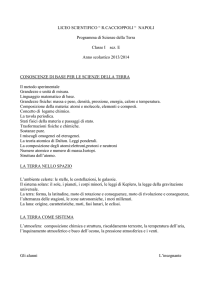
Figura 1. Serie di misure della componente di velocità u, ripetute nello stesso punto.
In figura 1 vengono rappresentate le serie di misure della componente di velocità nel medesimo
punto al passare del tempo. Il valore e lo scarto quadratico medio della velocità, nel punto di misura
e nell’istante t, vengono “naturalmente” definiti tramite le:
1 N
(
)
u
t
=
∑ ui (t )
N i =1
u' i (t ) = u i (t ) − u (t )
N
u' (t )2 = 1 ∑ (u' i (t ))2
N i =1
(1)
essendo u i (t ) il valore della ima ripetizione della misura della componente di velocità u, nell’istante t
e u' i (t ) lo scarto di quest’ultima rispetto al valor medio u (t ) . In linea di massima, la velocità media
ui (t )
11
u (t ) e lo scarto quadratico medio u' (t ) dipendono dal tempo. In tal caso la misura di velocità si
2
definisce statisticamente non stazionaria. Se viceversa la velocità media u (t ) e lo scarto
quadratico medio u' (t ) sono indipendenti dal tempo, la misura di velocità è detta statisticamente
stazionaria. Nell’approccio statistico alla turbolenza, le grandezze di interesse sono il valore medio
e lo scarto quadratico medio (ed eventualmente momenti statistici di ordine superiore come
skewness e kurtosis 1): la seconda in particolare fornisce una “misura” della “agitazione”, ossia della
intensità delle fluttuazioni del moto. Si definisce infatti intensità della turbolenza la quantità:
2
u' (t )
u (t )2
2
ℑ=
(2)
Da quanto appena visto, si comprende come nell’approccio statistico alla turbolenza, si rende
necessaria l’esecuzione di un numero molto elevato di misure. Infatti, dato un dominio spaziale
interessato da un moto turbolento e definito in esso un insieme di M punti nei quali si vuole
eseguire la misura, il numero totale delle misure risulta pari a N×M. Tuttavia nella pratica
sperimentale, per ridurre i tempi di esecuzione delle misure, si è soliti eseguire un numero di misure
pari ad M per un tempo T: ossia in ogni punto viene eseguita una sola misura di durata pari a T. In
tal modo per valore medio e scarto quadratico medio vengono adottate le definizioni:
t +T
1
(
)
=
u
x
∫t u ( x ,τ )dτ
T
u' (x , t ) = u ( x ,t ) − u
t +T
u' (x )2 = 1 (u' (x ,τ ))2 dτ
T ∫t
(3)
Nelle (3) si mette in luce il fatto che la nuova definizione di valore medio e scarto quadratico medio
a rigore elimina la dipendenza dal tempo. Viceversa, la dipendenza spaziale è evidenziata dalla
presenza esplicita della variabile indipendente x. Le definizioni (1) sono dette d’insieme, le (3)
temporali. In una trattazione statistica rigorosa dovrebbero essere adottate le prime; le seconde
possono però essere adottate in luogo di queste se sono verificate due condizioni fondamentali:
1. le misure sono statisticamente stazionarie;
2. il coefficiente di autocorrelazione C uu (x ,θ ) della misura è integrabile.
Per quanto riguarda la prima condizione, è intuitivo il fatto che, affinché le definizioni (3) siano
sensate, gli integrali devono essere indipendenti da t la qual cosa è in relazione con il fatto che
anche le definizioni (1) siano indipendenti da t. Se la misura non fosse statisticamente stazionaria, la
definizione (3) non avrebbe alcun senso e fornirebbe valori discordanti da quelli ottenuti con la (1).
1
Tali grandezze, o momenti statistici del terzo e quarto ordine, possono essere definite, facendo riferimento all’esempio
1 N
(u' i (t ))4 . Il loro significato verrà chiarito più avanti.
∑
N i =1
i =1
In linea generale, dato un campione statistico di N elementi ui (t ) , si definisce momento statistico di ordine n la
1 N
n
u
'
(
t
)
=
(u'i (t ))n .
grandezza:
∑
N i =1
sopra riportato, come u' (t ) =
3
1
N
N
3
∑ (u'i (t )) ,
u' (t ) =
4
12
La seconda condizione chiama in causa la definizione di coefficiente di autocorrelazione:
t +T
C uu ( x ,θ ) =
∫ u(x ,τ )u(x ,τ + θ )dτ
t
t +T
∫ u(x ,τ )
2
(4)
dτ
t
che fornisce una indicazione sulla correlazione della misura con se stessa, o, in altre parole, su
“quanto la misura abbia a che fare con se stessa” dopo un tempo di ritardo pari a θ. Una misura
deterministica è caratterizzata da un coefficiente di autocorrelazione non integrabile, poiché il
coefficiente di correlazione, dovendo esprimere il fatto che la correlazione interna della misura non
viene mai meno, anche se può variare, non tenderà a zero al tendere del tempo di ritardo θ
∞
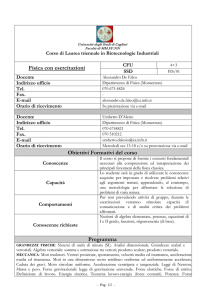
all’infinito. In tal caso dunque l’integrale: Λ( x ) = ∫ C uu ( x ,θ )dθ non assume valore finito. In figura 2
0
si riporta l’esempio del coefficiente di autocorrelazione di una misura avente legge sinusoidale nel
tempo:
t +T
u ( x ,t ) = U 0 sin(ωt ),C uu ( x ,θ ) =
∫ sin(ωτ ) sin(ω (τ + θ ))dτ
t
t +T
∫ sin (ωτ )dτ
(5)
2
t
Figura 2. Andamento del coefficiente di correlazione della misura deterministica (5). (ω=2π)
In una misura non deterministica, il coefficiente di autocorrelazione tende a zero più o meno
rapidamente al crescere del tempo di ritardo e successivamente assume valori trascurabili rispetto
all’unità (figura 3), indicando che oltre un certo valore del tempo di ritardo, la correlazione interna
della misura viene definitivamente meno.
13
Figura 3. Andamento del coefficiente di autocorrelazione di una misura non deterministica.
In tal caso il coefficiente di autocorrelazione è integrabile, ossia il valore di Λ( x ) è finito. La
quantità Λ ( x ) ha le dimensioni di un tempo e rappresenta praticamente l’ordine di grandezza del
tempo necessario affinché la misura perda ogni correlazione con se stessa; in genere viene definita
scala integrale della turbolenza. Di conseguenza, una singola misura di durata sufficientemente
lunga può essere vista, da un punto di vista pratico, come un insieme di misure indipendenti l’una
dall’altra, poiché dopo un certo intervallo di tempo la correlazione interna viene a mancare
completamente.
In definitiva, se la misura è statisticamente stazionaria e se il coefficiente di autocorrelazione si
annulla e rimane praticamente nullo dopo un intervallo di tempo finito, valor medio e scarto
quadratico medio del segnale possono essere calcolate, in base ai dati sperimentali, con le formule
(3)2.
Le equazioni di Reynolds
Da quanto appena visto, si intuisce come, soprattutto da un punto di vista tecnico, sia auspicabile
una descrizione dei flussi turbolenti attraverso le grandezze statistiche definite in base alle
grandezze di campo. Di particolare interesse risulta la descrizione del valor medio delle varie
grandezze di campo. A tal proposito, si consideri la decomposizione di una generica grandezza di
campo in valore medio e scarto (da qui in avanti, considerate valide le ipotesi di stazionarietà
statistica del campo considerato e di integrabilità del coefficiente di autocorrelazione, si intenderà
che l’operazione di media temporale sia equivalente a quella di media d’insieme):
G ( x,t ) = G ( x ) + G' ( x,t )
(6)
A rigore il valore medio è indipendente dal tempo. Tuttavia, “rilassando” leggermente il rigore delle
conseguenze delle ipotesi adottate, si può ammettere che il valore medio vari nel tempo in modo
tale che variazioni sensibili del valor medio di G ( x,t ) siano apprezzabili su una scala temporale T
molto maggiore di Λ ( x ) . In altre parole, si può ammettere che G sia sensibilmente costante durante
un intervallo di tempo passato il quale le fluttuazioni G' ( x,t ) perdono ogni correlazione interna.
Pertanto scegliendo la durata dell’intervallo di media T in modo tale che: T>>T>> Λ ( x ) , si è sicuri
di poter valutare le variazioni temporali dei valori medi, senza dover rinunciare all’introduzione
dell’operatore di media temporale.
La grandezza G ( x,t ) può rappresentare una componente di velocità, la pressione, la densità la
concentrazione di un contaminante.
Consideriamo pertanto le equazioni di Navier-Stokes per un fluido incomprimibile e sostituiamo in
esse la decomposizione (6), identificando G ( x,t ) con la pressione e la velocità, si ha:
Λ( x)
2
Tali ipotesi sono le ipotesi del noto teorema ergodico.
14
div(u + u' ) = 0
1
∂ (u + u' )
+ (u + u' ) ⋅ ∇(u + u' ) = − ∇( p + p' ) + g + ν∇ 2 (u + u' )
∂t
ρ
(7)
in cui ρ, ν, g sono rispettivamente la densità, la viscosità cinematica del fluido e la forza di massa
per unità di volume, per ipotesi non soggette a fluttuazioni.
Si può ora applicare l’operatore di media temporale alle equazioni (7), tenendo presente che dalla
(6) si ottiene:
1
T
t +T
∫ G ( x ,τ )dτ =
t
1
T
t +T
∫G dτ +
t
1
T
t +T
∫G' ( x ,τ )dτ = G
⇒
t
1
T
t+ T
∫G' (x ,τ )dτ = 0
(8)
t
ossia che il valore medio dello scarto è nullo.
L’applicazione dell’operatore di media temporale al valore medio restituisce il valore medio stesso,
poiché quest’ultimo è costante sull’intervallo temporale in cui si applica l’operatore di media.
Inoltre l’operatore di media temporale non è influenzato dalle operazioni di derivazione spaziale e
temporale (perché si ritiene che le operazioni di derivazione temporale siano effettuate rispetto ad
una scala dei tempi molto maggiore della scala integrale Λ( x ) e di quella usata per l'operazione di
media temporale T) e pertanto risulta indifferente l’ordine con cui si eseguono le operazioni di
media temporale e di derivazione spaziale e temporale. Dalla prima delle (7), denotando l’operatore
di media temporale:
1
T
t +T
∫ • dτ ≡
•
(9)
t
si ha:
div(u + u' ) = div (u + u' ) = div( u + u' ) = div(u ) = 0
(10)
D’altra parte, poiché l’operatore divergenza è lineare, risulta che:
div(u ) = div(u + u' ) = div(u ) + div(u' ) = div(u' ) = 0
(11)
ossia tanto il campo di velocità media che quello fluttuante risultano essere a divergenza nulla.
Considerando l’applicazione dell’operatore di media temporale (9) alla seconda delle (7) si ha:
1
∂ (u + u' )
+ (u + u' ) ⋅ ∇(u + u' ) = − ∇( p + p' ) + g + ν∇ 2 (u + u' )
ρ
∂t
(12)
Si osservi ora che i termini che contengono linearmente il campo medio di velocità o pressione
rimangono inalterati in seguito alla applicazione dell’operatore di media temporale, mentre quelli
che contengono linearmente il campo fluttuante di velocità o pressione si annullano in seguito alla
applicazione dell’operatore di media temporale, pertanto dalla (12) si ha:
∂u
1
+ u ⋅ ∇ u + u' ⋅∇u' = − ∇p + g + ν∇ 2 u
ρ
∂t
(13)
15
E’ importante osservare quanto segue:
•
•
•
non sono state considerate fluttuazioni della densità, della viscosità cinematica e delle forze
di corpo per unità di massa;
il valor medio viene considerato variabile nel tempo, su una scala temporale molto maggiore
della scala integrale Λ( x ) : per questo motivo compare il primo termine a primo membro
della (13);
l’applicazione
dell’operatore
di
media
temporale
al
termine
convettivo
(u + u' ) ⋅ ∇(u + u' ) genera due termini: il primo u ⋅ ∇ u dipendente solo dal valore medio del
campo di velocità, il secondo u' ⋅∇u' dipendente non linearmente dal campo di velocità
fluttuante.
Quest’ultimo termine può essere posto nella seguente forma3:
(
u' ⋅∇u' = div u' ⊗u'
)
(14)
in cui l’espressione u' ⊗u' rappresenta il tensore formato dal prodotto diadico4 del campo di velocità
fluttuante con se stesso.
Inoltre considerando che:
∇p = div( pI )
2
∇ u = 2div(D )
(15)
essendo I il tensore identità e D la parte simmetrica del tensore gradiente di velocità media, la (13),
in base alle (14) e (15), può essere posta nella forma:
(
)
∂u
+ u ⋅ ∇ u = − div pI − 2 µ D + ρ u' ⊗u' + ρg
∂t
ρ
(16)
In cui µ = ρν è la viscosità dinamica del fluido. Si noti che i primi due addendi del primo termine a
secondo membro della (16) rappresentano il tensore degli sforzi: T = pI − 2µ D calcolato con le
grandezze medie. A quest’ultimo, in conseguenza della decomposizione del campo di velocità in
campo medio e fluttuante e della applicazione dell’operatore di media, si aggiunge il termine
ρ u' ⊗u' dovuto alla presenza del campo di velocità fluttuante: tale termine rappresenta il trasporto
(mediato) della quantità di moto fluttuante dovuto alle fluttuazioni di velocità ed è in grado di
variare la quantità di moto del moto medio, in quanto agisce come termine forzante nella equazione
(16). In pratica il termine ρ u' ⊗u' rappresenta un flusso di quantità di moto scambiato tra il campo
medio e il campo fluttuante. Poiché l’azione del flusso di quantità di moto può essere associato alla
3
Infatti, considerando gli operatori gradiente e divergenza per componenti cartesiane e adottando la convenzione della
somma sugli indici ripetuti, si ha:
u' j
∂u'i u' j
∂u' j
∂u'i u' j
∂u'i
=
− u'i
=
, i = 1,K ,3
∂x j
∂x j
∂x j
∂x j
4
Il prodotto diadico tra due vettori u,v è un tensore del secondo ordine, le cui nove componenti, nel sistema di
riferimento cartesiano, sono date dai prodotti ui v j , i = 1,L ,3, j = 1,L ,3
16
azione di uno sforzo, il termine ρ u' ⊗u' può essere pensato come un vero e proprio tensore degli
sforzi che si aggiunge a quello caratteristico dovuto al campo medio T :
(
)
∂u
+ u ⋅ ∇ u = − div T + ρ u' ⊗u' + ρg
∂t
ρ
(17)
La (17) è la equazione di bilancio della quantità di moto di Reynolds. Nella letteratura
internazionale è anche nota come RANSE, ossia Reynolds Averaged Navier-Stokes Equation
(letteralmente: equazione di Navier-Stokes mediata alla Reynolds), in quanto è stata ottenuta
applicando l’operatore di media temporale (media di Reynolds) alla equazione di Navier-Stokes.
Gli sforzi di Reynolds
Nella letteratura scientifica il termine ρ u' ⊗u' è noto come tensore degli sforzi di Reynolds. Nel
sistema di riferimento cartesiano ortogonale è rappresentato dalla matrice:
u' 2
ρ u' ⊗u' = ρ u' v'
u' w'
u' w'
v' 2 v' w'
v' w' w' 2
u' v'
(18)
evidentemente simmetrica, essendo simmetrico il tensore che rappresenta. I termini della matrice
(18) si intendono definiti nel modo seguente: prese due componenti qualsiasi del campo di velocità
fluttuante in un punto, se ne forma il prodotto e successivamente si applica a tale prodotto
l’operatore di media temporale. Le componenti del tensore di Reynolds dipendono dal punto e, così
come il campo medio di velocità, sono stazionarie o dipendono dal tempo in modo tale che
variazioni delle componenti del tensore di Reynolds vengono osservate su scale temporali molto
maggiori della scala integrale Λ( x ) . La matrice (18) può essere decomposta in una parte isotropa e
una residua:
2
⊗
=
'
'
K I +T R
ρ
u
u
3
T R = ρ u' ⊗u'- 2 K I
3
(19)
In cui K è l’energia cinetica turbolenta media:
K =ρ
u' 2 + v' 2 + w' 2
2
(20)
Consideriamo ora una superficie infinitesima dA in seno alla massa fluida, di normale n e tangente
τ (figura 4):
17
n
dA
τ
Figura 4. La superficie infinitesima e i versori tangente e normale.
Lo sforzo causato dal tensore di Reynolds, agente sulla superficie dA, è dato dalla:
2
3
ρ u' ⊗u' n = K n + T R n
(21)
le cui componenti tangenziale e normale sono date rispettivamente dalle:
2
R
ρ u' ⊗u' n ⋅ n = K + T n ⋅ n
3
ρ u' ⊗u' n ⋅ τ = T R n ⋅ τ
(22)
Come si vede dunque, la parte isotropa contribuisce unicamente alla parte normale dello sforzo
agente sulla superficie dA e associato al flusso della quantità di moto fluttuante attraverso
quest’ultima. La parte residua contribuisce sia alla parte normale che alla parte tangenziale. Nella
maggior parte dei casi, la parte tangenziale dello sforzo associato al trasporto di quantità di moto
fluttuante attraverso la superficie predomina sulla parte normale. Identificando la normale alla
superficie dA con il versore dell’asse x (ex) (figura 5)
ez
ρ u' w'
ρ u' v'
dA
ey
ex
ρ u' 2
Figura 5. La superficie infinitesima avente normale coincidente con il versore dell’asse x (ex).
18
si hanno le seguenti componenti normale e tangenziale dello sforzo di Reynolds; la componente
tangenziale essendo ulteriormente decomposta nelle due componenti secondo gli assi y,z:
ρ u' ⊗u'e x ⋅ e x = ρ u' 2
ρ u' ⊗u'e x ⋅ e y = ρ u' v'
ρ u' ⊗u'e x ⋅ e z = ρ u' w'
(23)
La figura (5) permette un’ulteriore chiarimento sulla azione degli sforzi di Reynolds: le componenti
del flusso della quantità di moto totale attraverso la superficie dA nelle direzioni x,y,z sono date
rispettivamente dalle:
ρdA(U + u' )(
[ U + u' )⋅ e x ]⋅ e x = ρdA(U + u' )(U + u' )
[ U + u' )⋅ e x ]⋅ e y = ρdA(V + v' )(U + u' )
ρdA(U + u' )(
[ U + u' )⋅ e x ]⋅ e z = ρdA(W + w' )(U + u' )
ρdA(U + u' )(
(24)
le quali, in seguito alla applicazione dell’operatore di media temporale, forniscono le:
(
)
ρdA(U + u' )(
[ U + u' )⋅ e x ]⋅ e x = ρdA U 2 + u' 2
[ U + u' )⋅ e x ]⋅ e y = ρdA U V + u' v'
ρdA(U + u' )(
[ U + u' )⋅ e x ]⋅ e z = ρdA U W + u' w'
ρdA(U + u' )(
(
(
)
)
(25)
Ossia gli sforzi di Reynolds rappresentano uno sforzo addizionale esercitato sulla superficie
considerata e dovuto al flusso di quantità di moto legato al moto di agitazione. Le componenti di
tale sforzo hanno direzione normale (la prima espressione (25)) e tangenziale (la seconda e terza
espressione (25)) alla superficie considerata.
E’ opportuno concludere le considerazioni fatte con una analisi degli ordini di grandezza degli
sforzi di Reynolds in rapporto a quelli viscosi. Se, a titolo di esempio, consideriamo una corrente in
pressione in una condotta di diametro D, con componente prevalente della velocità u, e se,
ragionevolmente, assumiamo che l’ordine di grandezza del campo di velocità fluttuante u' sia pari
all’incirca al 10% dell’ordine di grandezza del moto medio:
u' ∝ 0.1U
(26)
L’ordine di grandezza dello sforzo di Reynolds è pari a:
ρ u' 2 ∝ 0.01ρU 2
(27)
Nella condotta, d’altra parte, l’ordine di grandezza degli sforzi viscosi è pari a:
µ
U
D
(28)
Il rapporto dell’ordine di grandezza degli sforzi di Reynolds sull’ordine di grandezza degli sforzi
viscosi è dunque pari a:
19
ρ u' 2 D
ρU D
∝ 0.01
= 0.01 Re
µU
µ
(29)
Considerando che nei moti turbolenti il numero di Reynolds è molto elevato (almeno maggiore di
2000 per le correnti in pressione), l’ordine di grandezza dello sforzo di Reynolds è almeno 20 volte
maggiore dell’ordine di grandezza dello sforzo viscoso. Il fatto che lo sforzo viscoso sia trascurabile
rispetto allo sforzo di Reynolds trova riscontro nella maggior parte della sezione della condotta,
mentre in una zona assai prossima alle pareti di quest’ultima, sforzo di Reynolds e viscoso hanno
ordine di grandezza paragonabile.
Equazioni di evoluzione della temperatura e di sostanze presenti nel
flusso.
La variazione rispetto al tempo dell’energia totale di un corpo fluido eguaglia la somma del lavoro
compiuto dalle forze di contatto e di corpo e del calore scambiato dal corpo attraverso le sue
superfici:
d
dt V
∫ ρ U +
u⋅u
dV = ρg ⋅ udV + (Tn ) ⋅ uds + q ⋅ nds
2
V
S
S
∫
∫
∫
(30)
in cui V, S sono volume e superficie del corpo fluido, U è l’energia interna del fluido e q è il vettore
flusso di calore. n è la normale alla superficie del corpo, con verso entrante. Applicando il teorema
della divergenza, si ottiene dalla (30), la seguente forma indefinita:
ρ
D
u⋅u
U +
= ρg ⋅ u − div(Tu ) − div(q )
2
Dt
(31)
Sviluppando il termine a primo membro e il termine div(Tu) si ha:
ρ
DU
Du
+ u⋅ρ
− ρg + div(T ) = −T : D − div(q )
Dt
Dt
(32)
Nel termine tra parentesi a primo membro si riconosce l’equazione di bilancio della quantità di
moto moltiplicata scalarmente per il vettore velocità u. Dalla (32) pertanto si ottiene il bilancio della
energia interna del fluido:
ρ
DU
= − p div(u ) + 2 µD : D − div(q )
Dt
(33)
avendo espresso il tensore degli sforzi tramite la relazione costitutiva dei fluidi newtoniani:
T = pI − 2 µ (D) , da cui consegue che il lavoro di deformazione − T : D si compone di una parte
reversibile dovuta alla comprimibilità dei fluidi ed una irreversibile, dovuta alla azione degli sforzi
viscosi, quadratica in D e dunque sempre positiva. Quest’ultima parte costituisce sempre, in altre
parole, un aumento di energia interna. La stessa quantità compare con segno negativo, costituendo
quindi una perdita, nella equazione della energia cinetica:
ρ
D u⋅u
D u⋅u
= ρg ⋅ u − div(Tu ) + T : D ⇒ ρ
= ρg ⋅ u − div(Tu ) + p div(u ) − 2 µD : D
Dt 2
Dt 2
20
(34)
In altre parole, l’azione degli sforzi viscosi si traduce, dal punto di vista energetico, in una
diminuzione di energia cinetica e in un corrispondente aumento di energia termica interna.
Adottando ora l’ipotesi di equilibrio termodinamico locale, la derivata totale rispetto al tempo della
energia interna può essere scritta nel modo seguente:
p Dρ
DU
DS
Dv
DS
DS p
=θ
−p
=θ
+ 2
=θ
− div(u )
Dt
Dt
Dt
Dt ρ Dt
Dt ρ
(35)
in cui S ,θ ,v sono rispettivamente l’entropia, la temperatura e il volume specifico ( v =
1
ρ
) del
fluido. Sostituendo l’ultimo membro della (35) nella (33), si ha:
ρθ
DS
= 2 µD : D − div(q )
Dt
(36)
dalla quale si deduce che l’azione degli sforzi viscosi è legata ad un aumento di entropia del fluido.
Per porre la (33) in una forma utile ai fini pratici occorre esprimere tanto la variazione di energia
interna quanto il flusso di calore in termini di temperatura. La legge di Fourier:
q = − K grad (θ )
(37)
lega il flusso di calore al gradiente di temperatura.
La variazione di energia interna può essere legata alla variazione di temperatura tramite
DU
Dθ
la:
= Cv
, essendo C v il calore specifico a volume costante del fluido, ipotizzando che
Dt
Dt
quest’ultimo si comporti come un gas perfetto. Si ha pertanto:
ρC v
Dθ
= − p div(u ) + 2 µD : D + div(K grad (θ ))
Dt
(38)
La (38) è la forma dell’equazione di bilancio dell’energia che viene usata per determinare
l’evoluzione della temperatura. Supponiamo per semplicità che il fluido sia incomprimibile,
sostituiamo in essa la decomposizione delle variabili in grandezze medie e fluttuanti:
θ = Θ + θ ' , D = D + D' ,u = U + u' e applichiamo ad essa l’operatore di media temporale. Si ottiene:
( )
∂Θ
+ div (ΘU ) + div θ ' u' = 2 µD : D + 2µ D' : D' + div(K grad (Θ ))
∂t
ρC v
(39)
Come si vede, dal termine convettivo, per effetto delle operazioni effettuate, scaturiscono due
termini: il primo div (ΘU ) contenente le sole grandezze medie, il secondo div θ ' u' le grandezze
fluttuanti. L’origine di quest’ultimo è analoga all’origine del termine di sforzo di Reynolds. Infine a
secondo membro si nota la presenza di due termini viscosi, legati alle grandezze medie e di
agitazione. E‘ interessante valutare il rapporto degli ordini di grandezza dei termini a primo e
secondo membro. I termini a primo membro, dette U , L ,θ 0 rispettivamente le scale della velocità,
spaziale e della temperatura, hanno ordine di grandezza pari a:
( )
21
θU
∂Θ
+ div(ΘU ) + div( θ ' u ) ∝ ρC v 0
L
∂t
ρC v
(40)
Il primo termine dissipativo a secondo membro ha ordine di grandezza:
2 µD : D ∝ µ
U2
L2
(41)
Il secondo termine a secondo membro tiene conto della energia dissipata dal moto a piccola scala e
ha ordine di grandezza pari a (come si vedrà diffusamente nel prossimo capitolo):
2µ D' : D' ∝ ρ
U3
L
(42)
Infine l’ultimo termine, che tiene conto del flusso di calore dalle zone a temperatura maggiore verso
quelle a temperatura minore, ha ordine di grandezza pari a:
div(K grad (Θ )) ∝ K
θ0
(43)
L2
In definitiva, i rapporti degli ordini di grandezza dei termini (41), (42) e (43) all’ordine di grandezza
del primo sono dati dalle:
U2 µ
E
=
C vθ 0 ρUL Re
U 2
=E
C vθ 0
K
1
=
ρC vUL Pe
(44)
in cui E, Pe sono rispettivamente i numeri adimensionali di Peclet ed Eckert. Tali numeri assumono
valori che dipendono sensibilmente dalle condizioni termodinamiche del flusso.
Il primo e il secondo numero adimensionale (44) rappresentano rispettivamente l’ordine di
grandezza della dissipazione prodotta dal moto medio e di agitazione. Il rapporto del secondo sul
primo eguaglia il numero di Reynolds: ciò conferma il fatto che la dissipazione dell’energia operata
dal moto medio è praticamente trascurabile rispetto a quella operata dal moto di agitazione.
Il terzo numero adimensionale, inverso del numero di Peclet, è definito come il rapporto della
K
= γ al prodotto UL: ha una struttura simile all’inverso del numero di
diffusività termica
ρC v
Reynolds e il rapporto tra Peclet e Reynolds, che eguaglia il rapporto della diffusività della quantità
Pe ν
di moto o viscosità cinematica alla diffusività termica, è detto numero di Prandtl:
= . Nei
Re γ
fluidi di comune impiego il numero di Prandtl è unitario, indicando così il fatto che le diffusività
termica e della quantità di moto hanno lo stesso ordine di grandezza.
Vediamo ora l’equazione di evoluzione di sostanze presenti nel flusso. Supponiamo che in un flusso
turbolento sia presente una sostanza. Si può trattare di una specie chimica, che pertanto può
combinarsi con altre sostanze presenti e con il fluido, di particelle solide minutissime trasportate dal
22
flusso o di un altro fluido. In ogni caso è possibile indicare con c la concentrazione della sostanza,
ossia la quantità di massa della sostanza presente nell’unità di volume. Il bilancio della quantità di
sostanza deve pertanto esprimere il fatto che, dato un volume di controllo V, la quantità di sostanza
in esso presente può variare in conseguenza dei flussi convettivi, della diffusione molecolare e di
eventuali pozzi o sorgenti di sostanza presenti all’interno del volume di controllo.
∂
cdV = ∫ cu ⋅ ndS + ∫ q c ⋅ ndS + ∫ Φ c dV
∂t V∫
S
S
V
(45)
Applicando il teorema della divergenza e considerando un volume di controllo arbitrario, dalla (45)
si ottiene la seguente forma indefinita:
∂c
+ div(cu ) = −div(q c ) + Φ c
∂t
(46)
in cui q c ,Φ c rappresentano rispettivamente il flusso di sostanza dovuto alla diffusione molecolare e
il termine pozzo o sorgente. Quest’ultimo, se la sostanza può reagire chimicamente o viene immessa
in seno alla massa fluida, rappresenta la quantità di sostanza per unità di volume che nell’unità di
tempo viene sottratta o apportata in conseguenza della reazione o dell’immissione.
In analogia al flusso di calore, si osserva generalmente che il flusso di sostanza dovuto alla
diffusione molecolare è legato ai gradienti di concentrazione della sostanza stessa (legge di Fick). Si
può perciò porre:
q c = − K c grad (c )
(47)
in cui Kc è il coefficiente di diffusività molecolare della sostanza. In conseguenza della (47) si
ottiene:
∂c
+ div(cu ) = div(K c grad (c )) + Φ c
∂t
(48)
Consideriamo ora, nell’equazione (48), la ormai consueta decomposizione delle variabili in
grandezze medie e fluttuanti: c = c + c' ,u = U + u' e applichiamo all’equazione (48) l’operatore di
media temporale. Si ottiene:
( )
( )
(
( ))
∂c
+ div cU + div c' u' = div K c grad c + Φ c
∂t
(49)
Anche in questo caso dal termine convettivo si ottengono due termini: il primo contenente le sole
grandezze medie, il secondo le sole grandezze fluttuanti. Analogamente a quanto osservato per
l’equazione dell’energia (39), quest’ultimo corrisponde al termine dell’equazione di bilancio della
quantità di moto contenente gli sforzi di Reynolds.
Il problema di chiusura
L’applicazione dell’operatore di media temporale alla equazione di continuità di un fluido
incomprimibile ha permesso di ottenere due singole equazioni di continuità per il campo di velocità
medio e fluttuante. L’applicazione dell’operatore di media temporale alla equazione di NavierStokes ha permesso di ottenere una equazione di bilancio della quantità di moto del moto medio, in
cui però compare un termine, interpretabile come sforzo aggiuntivo, espresso in funzione delle
23
velocità fluttuanti. Allo stesso modo, nel tentativo di ricavare equazioni di evoluzione per la
temperatura media e per la concentrazione media di sostanze presenti nel flusso, sono stati ottenuti
termini aggiuntivi contenenti le quantità fluttuanti: tali termini sono incogniti, pertanto le equazioni
di evoluzione delle quantità medie risultano essere in numero insufficiente e il problema risulta
quindi indeterminato. Il tentativo di ottenere delle equazioni di evoluzione per i termini aggiuntivi
contenenti le quantità fluttuanti risulta del tutto infruttuoso. Ad esempio le equazioni di evoluzione
delle singole componenti dello sforzo di Reynolds contengono termini del tipo
ui ' u j ' uk ' i = 1,K ,3, j = 1,K ,3, k = 1,K ,3, a loro volta incogniti. In altre parole non c’è modo,
nell’ambito della decomposizione in grandezze medie e fluttuanti, di ottenere un sistema di
equazioni chiuso, ossia tale da risolvere completamente il problema del moto medio e della
determinazione dei termini contenenti le grandezze fluttuanti. Tale problema, caratteristico dei
sistemi di equazioni non lineari, cui viene applicata una decomposizione delle incognite in valori
medi e fluttuanti, è detto problema di chiusura. E’ interessante osservare che i termini incogniti
contenenti le grandezze fluttuanti sono praticamente dei momenti statistici di ordine maggiore di
quello della grandezza di cui si vuole ottenere l’equazione di bilancio: nelle equazioni di bilancio
degli sforzi di Reynolds, che sono praticamente dei momenti statistici del secondo ordine negli
scarti di velocità, compaiono i termini incogniti ui ' u j ' uk ' i = 1,K ,3, j = 1,K ,3, k = 1,K ,3, ovvero
momenti statistici del terzo ordine negli scarti di velocità.
24
Capitolo II. Dinamica della turbolenza
Definizione di energia cinetica media e turbolenta
Definiamo energia cinetica per unità di massa di un fluido la quantità:
1
Ec = u ⋅ u
2
(1)
Adottando per il campo di velocità la decomposizione in valor medio e valore fluttuante,
l’espressione (1) assume la forma:
1
(u ⋅ u + 2u ⋅ u' +u' ⋅u' )
2
Ec =
(2)
Applicando alla (2) l’operatore di media temporale si ottiene:
Ec =
1
1
u ⋅ u + u' ⋅u'
2
2
(3)
ossia si può pensare che la media temporale dell’energia cinetica per unità di massa di un fluido in
moto turbolento sia pari alla somma della energia cinetica relativa al campo di velocità media:
K =
1
(u ⋅ u )
2
(4)
e della energia cinetica relativa al campo di velocità fluttuante:
K =
1
u' ⋅u'
2
(5)
Quest’ultima detta anche energia cinetica turbolenta media (formula (20), Cap. I).
Lo studio della dinamica delle quantità (4) e (5) permette di ottenere importanti informazioni sul
modo in cui la turbolenza estrae energia dal flusso medio, in corrispondenza dei moti a grandi scale
spaziali, e successivamente la dissipa per viscosità per mezzo dei moti a piccole scale spaziali. Per
quanto riguarda il meccanismo di trasferimento dell’energia dalle grandi alle piccole scale, risulta,
come si vedrà più avanti, di primaria importanza il ruolo della vorticità che, tramite il processo di
vortex stretching, è responsabile della generazione di moti fluttuanti a scale via via decrescenti.
Equazione della energia cinetica media
Si consideri l’equazione di bilancio del moto medio (equazione (16), Cap. I) e la si moltiplichi
scalarmente per il vettore velocità media u :
(
)
∂u
+ u ⋅ ∇ u = − u ⋅ div pI − 2µ D + ρ u' ⊗u' + ρ u ⋅ g
∂t
ρu ⋅
in cui le varie grandezze sono state definite nel I capitolo.
Si noti che:
25
(6)
∂u 1 ∂ (u ⋅ u ) ∂K
u ⋅ ∂t = 2 ∂t = ∂t
u ⋅ (u ⋅ ∇ u ) = 1 u ⋅ ∇(u ⋅ u ) = u ⋅ ∇K
2
u ⋅ div( pI ) = div( p u ) − pdiv(u ) = div( p u )
u ⋅ div (− 2µ D ) = − div(2µ D u ) + 2µ D : D
u ⋅ div ρ u' ⊗u' = div ρ u' ⊗u'u − ρ u' ⊗u' : D
(
)
(
(7)
)
Le formule (7) si ottengono con semplici trasformazioni. Le prime due forniscono rispettivamente
la derivata locale rispetto al tempo e la derivata convettiva della energia cinetica media. Nella terza,
stante l’ipotesi di incomprimibilità: div(u ) = 0 .
Nella quarta e nella quinta l’operatore : rappresenta il doppio prodotto scalare tra due tensori e, dal
punto di vista operativo, considerando le componenti cartesiane Dij del tensore, si definisce tramite
la:
D:D ≡
3
3
∑∑ D
(8)
ij Dij
i =1 j =1
In definitiva l’equazione (6), tenendo conto delle (7), assume la forma:
ρ
(
)
∂K
+ ρ u ⋅ ∇K = − div p u − 2 µ D u + ρ u' ⊗u'u − 2 µ D : D + ρ u' ⊗u' : D + ρ u ⋅ g
∂t
(9)
La (9) è precisamente l’equazione di bilancio della energia cinetica media. A primo membro si
trova la derivata totale della energia cinetica media. Il primo termine a secondo membro rappresenta
il trasporto della energia cinetica media dovuto agli sforzi di pressione, viscosi e di Reynolds.
Integrando infatti tale termine sul dominio del moto e applicando il teorema della divergenza (si
suppone che la frontiera del dominio del moto sia tale da permettere l’applicazione del teorema
della divergenza) si ottiene:
(
)
(
)
− ∫ div p u − 2 µ D u + ρ u' ⊗u'u dV = ∫ p u − 2µ D u + ρ u' ⊗u' u ⋅ ndS
V
(10)
S
essendo V,S,n rispettivamente il volume del dominio del moto, la frontiera di quest’ultimo e il
versore normale entrante nel dominio. Se pertanto la quantità p u − 2 µ D u + ρ u' ⊗u'u si annulla
sulla frontiera del dominio, il termine corrispondente non aumenta o diminuisce l’energia cinetica
media del corpo fluido all’interno del dominio del moto, semplicemente la ridistribuisce
all’interno di tale dominio. Il secondo e terzo termine a secondo membro della (9) rappresentano il
lavoro di deformazione5 compiuto dagli sforzi viscosi e di Reynolds, che può costituire una perdita
5
Il concetto di lavoro di deformazione per unità di massa Ldef può essere introdotto considerando il bilancio di energia
cinetica di un corpo fluido di volume V e limitato dalla frontiera S:
du
∫ ρu ⋅ dt dV = ∫ ρg ⋅ udV − ∫ div(T) ⋅ udV ,
V
V
V
in cui T è il tensore degli sforzi e n la normale entrante bel volume di fluido. Tale bilancio può essere espresso nel
26
o un guadagno di energia cinetica media: in particolare, il contributo degli sforzi viscosi è sempre
una perdita e il termine 2µ D : D è detto funzione di dissipazione viscosa. Il contributo degli sforzi
di Reynolds può essere di perdita o di guadagno di energia. In generale rappresenta una perdita:
ossia all’energia cinetica media viene sottratta una parte che va ad alimentare l’energia cinetica
turbolenta: per tale motivo il termine ρ u'⊗u' : D viene di solito chiamato produzione di energia
cinetica turbolenta. Il quarto termine a secondo membro della (9) infine rappresenta l’incremento o
decremento di energia cinetica media dovuto al lavoro delle forze di corpo. Solitamente si tratta di
un termine sorgente: le forze di corpo incrementano l’energia cinetica media. L’esempio più
semplice è dato dalla forza peso nelle correnti a superficie libera o dal gradiente di piezometrica
nelle correnti in pressione: in tali casi si ha una vera e propria forza motrice, responsabile del moto
a grande scala.
Il secondo termine a secondo membro della (9) (il termine di dissipazione viscosa) può essere
trascurato rispetto al terzo (il termine di produzione di energia cinetica turbolenta). Si può infatti
assumere che:
D∝
u
L
(11)
essendo u,L rispettivamente l’ordine di grandezza della velocità e della scala spaziale del moto
medio. L’ordine di grandezza u è tale da rappresentare sia il campo di velocità media che quello
fluttuante (a grande scala). Di conseguenza si ha, per l’ordine di grandezza del terzo termine a
secondo membro della (9):
ρ u' ⊗u' : D ∝ ρ
u3
L
(12)
Pertanto il rapporto degli ordini di grandezza del secondo e terzo termine a secondo membro della
(9) fornisce:
u2
µ 2
µD:D
ν
1
∝ L3 =
=
uL Re
u
ρ u' ⊗u' : D
ρ
L
(13)
1
<< 1 , pertanto il termine di dissipazione viscosa del moto
Re
medio può essere tranquillamente trascurato rispetto al termine del lavoro di deformazione
compiuto dagli sforzi di Reynolds. Quest’ultima conclusione esprime il fatto che la turbolenza a
grande scala tende ad essere virtualmente indipendente dalla viscosità. La viscosità fa sentire i suoi
effetti solo indirettamente, come si vedrà.
Il numero di Reynolds è tale per cui
modo seguente:
du
∫ ρu ⋅ dt dV = ∫ ρg ⋅ udV + ∫ (Tn )⋅ udS + ∫ T : DdV ,
V
V
S
in cui si mette in evidenza che
V
l’evoluzione della energia cinetica è determinata dal lavoro delle forze di corpo per unità di massa g, dal lavoro delle
forze di contatto e dal lavoro di deformazione per unità di volume Ldef = T : D . Per un fluido Newtoniano:
T = pI − 2 µD ⇒ T : D = pdiv(u ) − 2 µD : D . Il lavoro di deformazione, legato alla espansione e contrazione di
volume del corpo fluido e alla sua deformazione, esprime pertanto la parte di energia spesa per deformare il corpo
fluido. Si compone di una parte reversibile, appunto legata alle variazioni di volume, nulla per un fluido
incomprimibile, e una parte irreversibile, totalmente dissipativa, legata agli sforzi viscosi.
27
Equazione della energia cinetica turbolenta media
Si consideri l’equazione di Navier-Stokes:
1
∂u
+ u ⋅ ∇u = − ∇( p ) + 2νdivD + g
ρ
∂t
(14)
e la si moltiplichi scalarmente per il vettore velocità fluttuante u' :
u' ⋅
1
∂u
+ u' ⋅(u ⋅ ∇u ) = − u' ⋅∇( p ) + u' ⋅2νdivD + u' ⋅g
ρ
∂t
(15)
Applicando ora alla (15) l’operatore media temporale, si ottiene:
u' ⋅
1 ∂u' ⋅u' ∂K
∂u
∂u'
= u' ⋅
=
=
2 ∂t
∂t
∂t
∂t
( )
1
1
u' ⋅∇( p ) = div ( p' u' )
ρ
ρ
u' ⋅2νdivD = 2νdiv (D' u' ) − 2ν D' : D'
u' ⋅(u ⋅ ∇u ) = div u' K + u ⋅ ∇K + u' ⊗u' : D
(16)
u' ⋅g = 0
in cui il simbolo D' rappresenta la parte simmetrica del tensore gradiente di velocità definito con il
1
campo di velocità fluttuante e K l’energia cinetica turbolenta ( K = u' ⋅u' ). Si ottiene pertanto
2
l’equazione di bilancio della energia cinetica turbolenta media, ossia della energia cinetica legata ai
moti fluttuanti:
ρ
(
)
∂K
+ ρ u ⋅ ∇K = −div ρ u' K + p' u' − 2µ D' u' − 2 µ D' : D' − ρ u' ⊗u' : D
∂t
(17)
Si noti innanzitutto dall’ultima delle (16), che il termine della forza di corpo non fornisce contributo
alla evoluzione della energia cinetica turbolenta media. I moti a grande scala infatti determinano
l’evoluzione di quest’ultima tramite il terzo termine a secondo membro della (17): quest’ultimo è
precisamente uguale in modulo al terzo termine a secondo membro della (9) ma presenta segno
opposto. Poiché nella equazione (9) tale termine (presente con segno positivo) costituisce nella
maggior parte dei casi un pozzo di energia cinetica media, ossia assorbe energia cinetica media,
nella equazione (17) (presente con segno negativo) deve necessariamente costituire una sorgente di
energia cinetica turbolenta media, ossia incrementa l’energia cinetica turbolenta media. In altre
parole il moto medio alimenta il moto fluttuante, tramite il lavoro di deformazione compiuto dagli
sforzi di Reynolds. Il ruolo del primo termine a secondo membro, che appare come argomento
dell’operatore divergenza, è identico al primo termine a secondo membro della (9): ridistribuisce
l’energia cinetica turbolenta media nel dominio del moto senza aumentarla o diminuirla nel
complesso, se si verifica la condizione:
28
1
1
∫ div + ρ p' u' − 2ν D' u' dV = −∫ u' K + ρ p' u' − 2ν D' u ⋅ ndS = 0
V
(18)
S
in cui V, S sono, rispettivamente, il volume del dominio del moto e la superficie di frontiera di tale
dominio.
Il secondo termine a secondo membro della (17) è il lavoro di deformazione compiuto dagli sforzi
viscosi a causa delle velocità di deformazione fluttuanti. Si tratta sempre di un termine che causa un
decremento nella energia cinetica turbolenta media, essendo quadratico in D' , ed è detto termine di
dissipazione viscosa. Contrariamente al suo analogo della equazione (9) (il secondo termine a
secondo membro della (9)), è essenziale per la dinamica della turbolenza e non può essere
trascurato. Tale fatto implica che le deformazioni del moto fluttuante avvengono su scale spaziali
molto più piccole rispetto alla scala spaziale L del moto medio. Detta infatti λ la scala spaziale del
moto fluttuante, si può ottenere la seguente stima degli ordini di grandezza del secondo e terzo
termine a secondo membro della equazione (17):
2
2
µ
u
u
2
'
'
2
'
'
D
:
D
D
:
D
ε
ν
ν
ε
ν
⇒
∝
=
=
∝
ρ
λ
λ
3
u
u'⊗u' : D ∝ L
(19)
Pertanto, ipotizzando che gli ordini di grandezza di tali termini siano confrontabili: ε ∝ u'⊗u' : D , si
ottiene:
λ
L
∝
ν
uL
=
1
Re
(20)
La scala spaziale λ è anche detta microscala di Taylor: dalla (20) si comprende come, essendo
Re>>1, λ sia molto minore della scala spaziale del moto medio L. Il rapporto degli ordini di
grandezza delle velocità di deformazione del moto medio e del moto fluttuante, è dato sempre dalla
(20): ossia le velocità di deformazione del moto fluttuante sono molto maggiori delle velocità di
deformazione del moto medio. Poiché le velocità di deformazione hanno dimensione fisica pari alla
frequenza (l’inverso di un tempo), le velocità di deformazione del moto fluttuante corrispondono ad
alte frequenze, ossia a tempi piccoli, le velocità di deformazione del moto medio corrispondono a
basse frequenze, ossia a tempi grandi. In tal modo le velocità di deformazione dei due moti, data
l’ampia differenza di frequenza, che oltretutto aumenta all’aumentare del numero di Reynolds, non
interferiscono tra loro: ciò vuol dire che le deformazioni subite dal campo medio non influenzano le
deformazioni subite dal campo fluttuante, la cui struttura pertanto tende ad essere indipendente
dall’orientamento indotto dalla deformazione media. Da questa osservazione deriva l’ipotesi di
isotropia della turbolenza nelle piccole scale spaziali. E’ interessante considerare la differenza tra la
microscala di Taylor e quella di Kolmogorov. Dalla definizione della microscala spaziale di
Kolmogorov (prima formula (11) dell’Introduzione) e dalla (19) si ha:
14
ν 3
η =
ε
12
ν
=
ε
(νε )1 4 = λ (νε )1 4
u
⇒
η (νε )1 4
=
λ
u
(21)
dalla quale si comprende che la microscala di Taylor coincide con quella di Kolmogorov, se la scala
della velocità fluttuante coincide con la scala della velocità di Kolmogorov. La microscala di Taylor
29
pertanto non necessariamente è la più piccola scala spaziale presente, né è particolarmente
significativa per la caratterizzazione del processo dissipativo, cionondimeno è frequentemente
usata, lasciando indeterminata la stima della scala delle velocità fluttuanti. Va ribadito che la scala
spaziale caratterizzante il processo dissipativo è proprio la microscala di Kolmogorov.
E’ interessante osservare che, sempre facendo ricorso alla analisi degli ordini di grandezza, nella
equazione (17) e sfruttando la (20), il termine viscoso che appare nell’argomento della divergenza è
trascurabile rispetto agli altri termini. Infatti si ha:
u3
div u' K ∝
L
1
u3
∝
div
p
'
'
u
ρ
L
u2
u3
div 2ν D' u' ∝ ν
=
Lλ L Re
( )
(
(22)
)
Pertanto nella equazione di evoluzione della energia cinetica turbolenta media, il termine che
dissipa l’energia trasferita dal moto medio al moto di agitazione è esclusivamente il termine di
dissipazione viscosa 2µ D' : D' .
Dinamica della vorticità
Tra il moto medio e il moto di agitazione sussiste un flusso di energia: infatti dal moto a grande
scala viene “estratta” energia tramite il termine di produzione (il terzo termine a secondo membro
della (9)), con conseguente decremento di energia cinetica media, e trasferita al moto fluttuante a
piccola scala, con conseguente incremento di energia cinetica turbolenta media, tramite il medesimo
termine di produzione che appare però nella equazione (17) con segno opposto a quello con cui
appare nella (9). La modalità del trasferimento si fonda sulla dinamica della vorticità, precisamente
sul fenomeno del vortex stretching o stiramento dei filamenti vorticosi.
Per comprendere la dinamica del vortex stretching è opportuno ricordare che nell’intorno di un
punto O (figura 1), individuato dal vettore dx, l’incremento di velocità è dato dalla formula:
u+du
du
u
dx
O
u
Figura 1. Variazione spaziale del campo di velocità
1
du = grad (u )dx = (D + Ω )dx = Ddx + ω × dx
2
(23)
In cui Ω è la parte antisimmetrica del tensore gradiente di velocità. Nella (22), in cui si è sfruttata la
1
relazione: Ωdx = ω × dx , la vorticità ω assume il significato di velocità angolare di rotazione. Ad
2
30
un incremento di vorticità corrisponde dunque un incremento di velocità nell’intorno del punto. E’
utile ora considerare l’equazione di evoluzione della vorticità, ottenuta applicando l’operatore rotore
alla equazione di Navier Stokes:
∂ω
+ u ⋅ ∇ ω = ω ⋅ ∇u + ν ∇ 2 ω + ∇ × g
∂t
(26)
in cui l’ultimo termine tiene conto delle eventuali forze di corpo non derivanti da un potenziale
scalare. Si proietti ora l’equazione vettoriale (26) in una direzione, ad esempio quella coincidente
con l’asse z in un sistema di coordinate cartesiane ortogonali, e si supponga che velocità e vorticità
abbiano componenti non nulle esclusivamente in questa direzione:
dωz
∂ωz
∂ω
∂w
+w z =
= ωz
dt
∂z
∂t
∂z
(27)
sono stati evidentemente trascurati i termini viscosi e dovuti a forze di corpo non derivanti da
∂w
potenziale. La (27), considerando la quantità
costante, può essere risolta, assumendo noto il
∂z
valore iniziale ω0 z per la vorticità:
∂w
ωz = ω0 z e ∂z
t
(28)
Il valore della (28) è puramente qualitativo, viste tutte le ipotesi poste, tuttavia fornisce una
∂w
importante informazione: se la quantità
è positiva la vorticità aumenta (a partire dal valore
∂z
iniziale), se viceversa è negativa, diminuisce. Inoltre, se la vorticità iniziale è nulla, secondo la (28)
la vorticità rimane nulla per tutti gli istanti successivi poiché non vi sono cause che possano farla
generare. L’aumento o diminuzione della vorticità inizialmente presente è dunque legato alla
∂w
quantità
. Quest’ultima rappresenta la velocità con cui un segmento fluido si deforma nella
∂z
direzione considerata, ossia l’allungamento o accorciamento, nella direzione considerata, per unità
∂w
è positiva, il segmento fluido tende ad
di tempo e di lunghezza: se pertanto la quantità
∂z
∂w
è negativa, il segmento fluido tende ad accorciarsi. Il segmento fluido
allungarsi, se la quantità
∂z
in considerazione è un filamento vorticoso: il vortex stretching consiste dunque nel fatto che un
filamento vorticoso che si allunga aumenta contemporaneamente l’intensità della vorticità e
diminuisce la dimensione caratteristica. Quest’ultima affermazione si comprende facilmente
osservando che un corpo fluido conserva il momento della quantità di moto se il momento delle
forze esterne su di esso agenti è a risultante nullo. In tal caso, sempre facendo riferimento (figura 2)
alla considerazione di una vorticità orientata secondo l’asse z e ad un campo di velocità da essa
indotto (nell’intorno dell’asse z), si ha che il momento della quantità di moto K è dato dalla
formula:
R2
K = Mω z
ez
2
(29)
31
essendo M = ρπR 2 h la massa del corpo fluido, costante, R la dimensione radiale del corpo, h
l’altezza, ρ la densità.
z
ωz
R
ωzr
r
h
Figura 2. Il corpo fluido in rotazione
∂w
, aumenta la
∂z
vorticità, secondo la (28), e di conseguenza diminuisce la dimensione del corpo fluido, secondo la
(29). Poiché si è parlato di intorno dell’asse z, è possibile identificare il corpo fluido con un
filamento vorticoso “grasso” o semplicemente con un vortice: l’effetto conclusivo consiste nel fatto
che in conseguenza dello stiramento il vortice aumenta la vorticità e riduce la sua dimensione.
E’ bene ripetere che i risultati sinora ottenuti hanno un valore puramente qualitativo, visto che sono
state trascurate le forze viscose e quelle non derivanti da potenziale (queste ultime in realtà non
sempre sono presenti). Tuttavia l’effetto che si riscontra nella realtà coincide sostanzialmente con
quello sopra descritto, anche perché la viscosità per avere effetto, che consiste nella diffusione della
vorticità, richiede un tempo maggiore di quello necessario per l’azione di stiramento. Più complessa
invece è l’azione contemporanea degli stiramenti nelle altre direzioni. Quest’ultima però può essere
schematizzata nel modo seguente: lo stiramento di un vortice in una direzione provoca aumento di
vorticità in quella medesima direzione, riduzione della dimensione trasversale del vortice e aumento
della velocità nel piano perpendicolare al vortice. L’aumento delle velocità in date direzioni
produce stiramento dei vortici con asse parallelo a quelle direzioni e così via. Si innesca una sorta di
reazione a catena che si risolve in una progressiva riduzione delle dimensioni dei vortici, bilanciata
dalla dissipazione viscosa che però interviene solo quando le dimensioni dei vortici divengono
confrontabili con la microscala di Kolmogorov.
E’utile visualizzare il processo di vortex stretching e della conseguente riduzione delle scale del
moto con il seguente “albero genealogico” (figura 3):
Dunque, se il corpo fluido viene “stirato” nella direzione z, per l’azione del termine
32
z
x
y
y
x
z
z
x
x
y
y
x
0
y
0
z
1
1
1
0
1
1
2
3
3
2
z
z
x
y
Figura 3. L’albero genealogico del vortex stretching
L’iniziale stretching nella direzione z intensifica il moto nelle direzioni x, y, che, a loro volta lo
intensificano nelle direzioni y, z e x, z e così via. Dopo pochi “passaggi” è possibile vedere che
l’iniziale stretching nella direzione z produce un’eguale ammontare di stretching in ciascuna delle
tre direzioni spaziali, con conseguente intensificarsi del moto e riduzione delle scale spaziali. In tal
senso è ovvio che i vortici a piccola scala non saranno influenzati dalla struttura del moto a grande
scala, ma tenderanno a mostrare una struttura “universale”. La “cascata” di energia genera, a partire
dalle grandi scale, quelle via via più piccole, finchè non interviene la viscosità. Va notato che la
viscosità agisce solo in corrispondenza dei vortici più piccoli e non ha praticamente alcuna
influenza nel processo intermedio di stretching. E’ possibile sintetizzare quanto visto finora nel
seguente schema (figura 4):
Moto a grande
scala
Trasferimento a scale
decrescenti (Vortex Stretching)
Moto a piccola
scala
sforzi di Reynolds
Dissipazione
viscosa
Dissipazione viscosa (trascurabile)
Dissipazione viscosa
Figura 4. Lo schema della “cascata” di energia nel moto turbolento.
Spettro dell’energia cinetica turbolenta media
In un flusso turbolento vi è la compresenza di moti a differenti scale. La dinamica del vortex
stretching rende conto della formazione dei moti a piccola scala da quelli a grande scala. Si è inoltre
visto come dal moto medio venga estratta energia: quest’ultima viene ceduta al moto di agitazione
in corrispondenza di scale spaziali a dimensione paragonabile a quella del moto medio e
successivamente trasferita a scale spaziali a dimensioni decrescenti, finchè non interviene il
processo dissipativo viscoso, attivo appunto alle scale più piccole.
33
Si consideri un flusso turbolento ad alto numero di Reynolds. Siano U,L rispettivamente le scale
della velocità e spaziale del moto medio. Consideriamo inoltre la presenza di moti di agitazione le
cui scale della velocità e spaziali siano indicate da u,l. L’ordine di grandezza della u può essere
definito come:
u = 2K
(30)
Va notato che le scale u, l assumono ordini di grandezza compresi in un intervallo i cui estremi sono
paragonabili rispettivamente alle scale del moto medio, per i moti di agitazione più grandi, e alle
microscale di Kolmogorov, per i moti di agitazione più piccoli. Il numero di Reynolds del generico
moto di fluttuazione:
Rel =
ul
(31)
ν
varia dunque nell’intervallo:
1 ≤ Rel ≤
UL
(32)
ν
Il trasferimento o cascata di energia dalle grandi alle piccole scale è un processo sostanzialmente
non viscoso (dominato dunque dalle forze di inerzia) finchè il numero di Reynolds (31) diviene tale
che: Rel ∝ 1 e la viscosità molecolare risulta effettiva ai fini della dissipazione dell’energia.
Lo schema della cascata di energia pone la dissipazione dell’energia alla fine del processo di
trasferimento ma la quantità di energia dissipata ε è determinata sostanzialmente dalla quantità
estratta dal moto medio, essendo, come visto, il processo di trasferimento sostanzialmente non
dissipativo. Si può stimare la quantità di energia dissipata pertanto tramite la:
ε=
u03
l0
(33)
essendo le scale l0 ,u0 corrispondenti ai moti di agitazione a grande scala. Introduciamo ora le
seguenti ipotesi di Kolmogorov:
1. per numeri di Reynolds sufficientemente alti, i moti turbolenti a piccola scala ( l << l0 ) sono
localmente isotropi;
2. in ogni flusso turbolento, per numeri di Reynolds sufficientemente alti, le proprietà
statistiche dei moti di piccola scala sono determinate unicamente da ε, ν.
3. in ogni flusso turbolento, per numeri di Reynolds sufficientemente alti, esiste un campo di
valori di scale spaziali dei moti di agitazione, le cui proprietà statistiche sono determinate
unicamente da ε.
Vediamo quali sono le conseguenze di tali ipotesi. In base alla prima le informazioni relative alla
influenza direzionale che i moti a grande scala possono avere sui moti a scala decrescente vengono
progressivamente perdute al decrescere della scala. Si intuisce come le proprietà statistiche dei moti
a piccola scala assumano un valore universale, simile, a parità di numero di Reynolds.
34
In base alla seconda ipotesi, si osserva che i moti a piccola scala devono essere necessariamente
legati alla quantità di energia dissipata ε e alla viscosità cinematica ν. Da questi due parametri si
possono formare le seguenti scale di lunghezza, velocità e tempo (microscale di Kolmogorov):
14
ν 3
η =
ε
14
uη = (εν )
12
τ = ν
η ε
(34)
Come è noto, il numero di Reynolds formato dalle microscale di Kolmogorov è unitario:
uηη
ν
=1,
tali microscale pertanto caratterizzano i moti di agitazione dissipativi. La microscala τ η è la minima
scala temporale che si può riscontrare nei moti di agitazione: può essere vista come una stima del
tempo necessario ai moti di agitazione per adattarsi a mantenere l’equilibrio dinamico con il flusso
di energia trasferito dalle scale maggiori. Va inoltre notato che, per la stima (33) e per il fatto che:
u0 ∝ U ,l0 ∝ L , il rapporto tra le microscale (34) e le corrispondenti scale del moto medio è dato
dalle:
1
η
L = Re3 4
1
uη
= 14
U Re
Uτ η
1
= 12
Re
L
(35)
La qual cosa mostra come sia necessario avere un numero di Reynolds elevato affinché le scale del
moto siano sufficientemente separate.
Dalla terza ipotesi infine emerge il fatto che, per valori delle scale spaziali tali che: η << l << l0 , il
corrispondente numero di Reynolds (31) è sufficientemente elevato per cui gli effetti dissipativi si
possono comunque ritenere trascurabili e di conseguenza si può assumere che tali moti siano
indipendenti dalla viscosità. E’ conveniente fissare i seguenti limiti per le scale spaziali dei moti
fluttuanti:
•
•
l EI : scala spaziale al di sotto della quale si ha l’isotropia delle piccole scale;
l DI : scala spaziale al di sotto della quale diviene effettiva la dissipazione viscosa;
e individuare i seguenti campi di variazione delle scale spaziali dei moti fluttuanti:
•
•
l EI ≤ l ≤ L campo delle scale di produzione di energia (energy containing range);
η ≤ l ≤ l EI campo delle scale di equilibrio universale (universal equilibrium range), a sua
volta diviso in:
1. l DI ≤ l ≤ l EI sotto-campo delle scale inerziali (inertial subrange);
2. η ≤ l ≤ lDI campo delle scale dissipative
35
Il campo delle scale di equilibrio universale è così definito perché costituito da quelle scale spaziali,
che non risentono della anisotropia caratteristica del moto di larga scala e che si mantengono
costantemente in equilibrio con il flusso di energia proveniente dalle scale maggiori. Quest’ultimo
si divide in sotto-campo delle scale inerziali, in corrispondenza delle quali la dissipazione è
trascurabile, e campo delle scale dissipative, in corrispondenza delle quali la dissipazione è attiva.
Vediamo ora finalmente come l’energia cinetica turbolenta sia distribuita tra le varie scale. Per tale
scopo è utile considerare lo spettro E(k) della energia cinetica turbolenta media. Tale quantità può
essere introdotta a partire dal tensore di correlazione, le cui componenti cartesiane sono espresse
dalla:
Rij (r ) = ui ' (x ,t )u j ' (x + r ,t ) i = x , y , z ,
j = x, y, z
(36)
Tale tensore esprime praticamente la correlazione tra la misura della jma componente della velocità
di agitazione nel punto x+r con la misura della ima componente della velocità di agitazione nel
punto x. E’ chiaramente una funzione decrescente di r poiché la correlazione tra due misure in punti
∞
R (r )
differenti diminuisce all’aumentare della distanza tra i due punti. Inoltre l’integrale: ∫ ij dr = Lij
Rij (0 )
0
definisce la scala integrale spaziale della turbolenza.
Per semplicità nella (36) si è omessa la dipendenza dal tempo da parte del tensore di correlazione.
E’ interessante osservare che il tensore di Reynolds è dato dal tensore di correlazione per r=0 e che
sussiste la seguente identità:
R11 (0) + R22 (0 ) + R33 (0 ) u1' (x ,t )u1' (x ,t ) + u2' (x ,t )u2' (x ,t ) + u3' (x ,t )u3' (x ,t )
=
=K
2
2
(37)
Consideriamo ora la trasformata di Fourier6 spaziale del tensore di correlazione:
ϕij (k ) =
+∞ +∞ +∞
1
R (r )e
(2π ) ∫ ∫ ∫
ij
3
− Ik x x − Ik y y − Ik z z
e
e
(38)
dxdydz
− ∞− ∞− ∞
in cui k x , k y , k z , numeri d’onda nelle tre direzioni spaziali, sono le componenti del vettore d’onda k,
x,y,z, sono le componenti del vettore r. Al variare delle componenti del vettore d’onda viene
rappresentato lo spettro tridimensionale del tensore di correlazione.
L’antitrasformata della (38) restituisce il tensore di correlazione:
Rij (r ) =
+∞ +∞ +∞
∫ ∫ ∫ ϕ (k )e
ij
Ik x x Ik y y Ik z z
e
e
(39)
dk x dk y dk z
− ∞− ∞− ∞
Sfruttando l’identità (37) e la definizione della antitrasformata di Fourier (39) si ottiene:
+∞ +∞ +∞
K =
1
(ϕ11 (k ) + ϕ 22 (k ) + ϕ 33 (k ))dk x dk y dk z
2 −∫∞−∫∞−∫∞
(40)
6
Definizione, proprietà e uso della trasformata di Fourier saranno introdotte più oltre, nella parte dedicata alla analisi
sperimentale della turbolenza.
36
Le funzioni esponenziali non compaiono in quanto si è posto r=0. L’integrale (40) deve essere
calcolato nello spazio dei numeri d’onda. E’ possibile esprimerlo nel modo seguente:
K =
+∞ +∞ +∞
+∞
+∞
1
1
(
(
)
(
)
(
)
)
(
(
)
(
)
(
)
)
ϕ
k
+
ϕ
k
+
ϕ
k
dk
dk
dk
=
ϕ
k
+
ϕ
k
+
ϕ
k
d
σ
dk
=
E (k )dk
x
y
z
11
22
33
11
22
33
∫
2 −∫∞−∫∞−∫∞
2 ∫0 ∫∫
σ
0
(41)
ossia, definendo E(k) come l’integrale di
ϕ11 (k ) + ϕ 22 (k ) + ϕ33 (k )
2
sulla superficie sferica σ, di
raggio k = k x2 + k y2 + k z2 , e successivamente introducendo l’integrale di E(k) rispetto a k. In tal
modo si elimina ogni dipendenza dalla direzione del numero d’onda (di cui sarebbe estremamente
complicato tener conto) e si riduce il tutto alla dipendenza dal modulo k del numero d’onda.
Di conseguenza la grandezza E(k) assume il significato di distribuzione spettrale dell’energia
cinetica turbolenta media: ossia la quantità E(k)dk rappresenta l’energia cinetica turbolenta media
apportata dalle scale del moto comprese tra il numero d’onda di modulo k e il numero d’onda di
modulo k+dk. L’integrale ∫ E (k )dk fornisce l’energia cinetica turbolenta media associata ai moti di
kb
ka
2π
2π
≤l ≤
. La funzione E(k) dunque descrive il modo
kb
ka
in cui l’energia cinetica turbolenta si distribuisce tra le scale spaziali.
Dalla terza ipotesi di Kolmogorov segue che:
agitazione le cui scale sono comprese tra
f ( E , k ,ε ) = 0
(42)
ossia che deve esistere un legame tra lo spettro, il numero d’onda e la dissipazione viscosa.
Applicando il teorema di Buckingham, visto che le tre grandezze in gioco sono cinematiche, si ha:
E = Cε 2 3 k −5 3
(43)
in cui C è una costante universale. La (43) è evidentemente valida nell’inertial subrange. Nel
dissipation e nell’energy containing range l’andamento dello spettro è diverso. In particolare, nel
dissipation range, in base alla prima ipotesi di Kolmogorov, si può porre che:
f (E , k ,ε ,ν ) = 0
(44)
in cui vi sono in gioco quattro grandezze cinematiche. Applicando il teorema di Buckingham si ha:
k 4 1 3
E = f ν ε 2 3 k −5 3 = f * (kη )ε 2 3k −5 3
ε
*
(45)
dalla quale si evince che nel dissipation range il rapporto E ε 2 3 k −5 3 diviene una funzione del
prodotto kη.
E’ interessante osservare che l’andamento dello spettro della energia cinetica turbolenta (43) può
essere anche giustificato dal seguente ragionamento. Si assuma una legge di potenza generica:
E = Ck − p
(46)
37
e si consideri che l’energia cinetica contenuta nell’intervallo dei numeri d’onda k ≤ κ ≤ ∞ è data
dalla formula:
∫
∞
k
κ 1− p k 1− p
+
E (κ )dκ = A lim
κ →∞ 1 − p p − 1
(47)
quest’ultima assumerà valore finito per p ≥ 1 . La dissipazione viscosa, nell’intervallo dei numeri
d’onda 0 ≤ κ ≤ k viene stimata dalla formula:
k
κ 3− p
2ν ∫ κ E (κ )dκ = 2νA
0
3 − p 0
k
2
(48)
5
è per l’appunto intermedio tra 1 e 3.
3
La legge (43), detta anche spettro di Kolmogorov, è valida nell’inertial subrange ed è stata
confermata da dati relativi alle più svariate configurazioni sperimentali, ottenuti nelle più disparate
condizioni di tempo e luogo (figura 5).
che assume valore finito per: p ≤ 3 . Il valore p =
Figura 5. Esempi di spettri di Kolmogorov ottenuti nelle più disparate condizioni.
38
In figura 5 si è assunta come variabile indipendente sull’asse delle ascisse il prodotto del numero
d’onda per una scala l caratteristica del dissipative range: per tale motivo il prodotto kl varia da
valori piccolissimi (energy containing range, inertial subrange) a valori quasi unitari (dissipative
range).
Una forma più generale dello spettro di Kolmogorov, valida anche nelle zone di produzione e
dissipazione di energia, è data dalla:
E = Cε 2 3 k −5 3 f * (kη ) f L (kL )
(49)
in cui f * , f L sono funzioni adimensionali, da determinare sperimentalmente: esse devono tuttavia
soddisfare le seguenti condizioni:
lim f * (kη ) = 1
kη →0
f L (kL ) = 1
kLlim
→∞
(50)
Tali condizioni traducono sia il fatto che nell’inertial subrange (scale spaziali contemporaneamente
maggiori della microscala di Kolmogorov e minori della macroscala del moto medio) lo spettro
deve dipendere solo dalla dissipazione viscosa ε e dal numero d’onda k, sia il fatto che negli estremi
del campo di variazione del numero d’onda, alternativamente l’una o l’altra funzione si riduce al
valore costante unitario. Le forme più adottate per f * , f L sono le seguenti:
14
*
− β [( kη )4 + cη4 ] − cµ
=
f
e
5
+ p0
3
kL
f =
L
2
(kL ) + c L
(51)
in cui le costanti β , cη , p 0 , c L devono essere calibrate sperimentalmente. In particolare la
determinazione, piuttosto comune, p 0 = 2 , fa risultare E ∝ k 2 nell’energy containing range ( kL ∝ 1 ).
In figura 6 viene riportato un esempio di spettro di Kolmogorov in un ampio campo di variazione
del numero d’onda.
Figura 6. Spettro di Kolmogorov nelle tre zone.
39
Analogamente alla figura 5, si è assunta come variabile indipendente sull’asse delle ascisse il
prodotto del numero d’onda per una scala l caratteristica del dissipative range. Si notano le
pendenze logaritmiche, pari rispettivamente a 2 e -5/3 negli energy containing range ed inertial
subrange, e l’andamento esponenziale decrescente nel dissipation range.
Si deve infine osservare che alla base di tutte le considerazioni sinora fatte, vi è l’ipotesi che il
numero di Reynolds, definito con le scale del moto medio, sia molto grande. Posto che questa
condizione sia soddisfatta, è interessante osservare, sia pur qualitativamente, che all’aumentare del
numero di Reynolds si verifica un ampliamento dell’inertial subrange e una diminuzione delle
microscale di Kolmogorov. Tale fatto d’altra parte si evince dalle formule (35). Si può dire in
definitiva che all’aumentare del numero di Reynolds si verifica la piena separazione delle scale del
moto. In figura 7 viene illustrato quanto affermato: al crescere del numero di Reynolds Rλ è
evidente l’ampliamento della zona di spettro con pendenza logaritmica -5/3 e il conseguente
aumento del numero d’onda dissipativo ( kη ∝
1
η
) dovuto alla diminuzione della microscala di
Kolmogorov.
Figura 7. Influenza del numero di Reynolds sull’andamento dello spettro di Kolmogorov
In figura 7 si è assunta come variabile indipendente sull’asse delle ascisse il prodotto del numero
d’onda per una scala L11 caratteristica dell’energy containing range: per tale motivo il prodotto kL11
varia da valori di ordine di grandezza unitario (energy containing range) a valori via via più elevati
(inertial subrange, dissipative range).
40
Capitolo III. Introduzione alla modellazione e alla simulazione
della turbolenza. L’approccio della viscosità turbolenta
Premessa
Le difficoltà offerte all’approccio analitico nello studio dei flussi turbolenti sono note: si ricorda che
il campo fluidodinamico è tridimensionale, non stazionario, caotico, sono presenti
contemporaneamente moti le cui dimensioni caratteristiche variano da quelle comparabili con la
geometria di contorno (ad es. il diametro di un tubo D) a quelle comparabili con la microscala di
Kolmogorov (η ∝ D Re −3 4 )7, il moto turbolento è il risultato di un complesso processo di
transizione che ha origine da una condizione di moto laminare.
Per i motivi sinteticamente riportati, lo sviluppo delle metodologie d’indagine sperimentale e
numerica hanno ricevuto, nel corso del secolo scorso, un forte impulso. La metodologia d’indagine
sperimentale ha una tradizione più antica di quella numerica e sviluppo della ricerca scientifica sulla
turbolenza nei primi decenni del secolo XX coincide praticamente con lo sviluppo delle tecniche
sperimentali di misura dei flussi turbolenti. Si può dire che la maggior parte degli strumenti di
misura della velocità vennero ideati e realizzati appositamente per le misure di turbolenza.
La metodologia d’indagine numerica è viceversa più recente ed ha avuto uno sviluppo molto
intenso grazie alle crescenti risorse di calcolo offerte dai calcolatori elettronici: in estrema sintesi
consiste nell’applicare ad un modello matematico (ad es. un sistema di equazioni differenziali alle
derivate parziali con relative condizioni iniziali e al contorno) una procedura che permetta di
ottenere valori approssimati della soluzione in punti ed istanti prestabiliti (griglia computazionale).
Nella metodologia d’indagine numerica vi sono due punti fondamentali: la definizione del modello
matematico e la scelta della procedura numerica. Il modello matematico viene definito in funzione
del problema affrontato: tale definizione è cruciale e determina la qualità della soluzione.
In questa sede l’attenzione sarà focalizzata sulla definizione dei modelli matematici idonei allo
studio dei flussi turbolenti.
Nel corso del tempo sono stati sviluppati molteplici modelli matematici per lo studio dei flussi
turbolenti: è opportuno, prima di iniziare la descrizione dei più significativi, esaminarne le
caratteristiche fondamentali. Vi è infatti una vastissima gamma di flussi turbolenti cui corrisponde
una vastissima gamma di problematiche. Si può dire in pratica che non esista un modello
matematico che vada bene in tutti i casi e per tutte le applicazioni: ognuno di essi può essere
contemporaneamente ottimale in alcune applicazioni e inadatto in altre. E’ utile perciò individuare
delle caratteristiche fondamentali in base alle quali si possono valutare i differenti modelli
matematici. mTali caratteristiche sono le seguenti:
1.
2.
3.
4.
5.
livello di descrizione;
completezza;
costo e facilità d’uso;
campo di applicabilità;
accuratezza.
Nel seguito verrà esaminato in dettaglio il significato di ciascuna di tali caratteristiche.
7
Per avere un’idea dell’intervallo di dimensioni spaziali che si possono avere in un flusso turbolento, si consideri un
moto in condotta caratterizzato dai seguenti dati: Q = 0.1m s , D = 1m ,ν = 10 m s . I valori del numero di
Reynolds
e
della
microscala
di
Kolmogorov
sono
dati
rispettivamente
dalle:
3 −1
Re =
−6
2
−1
4Q
= 127324 ,η ∝ D Re −3 4 = 1.510 − 4 m : dunque si hanno scale spaziali distribuite nell’intervallo
πDν
compreso tra un metro e un decimo di millimetro.
41
Livello di descrizione. Per livello di descrizione si intende la quantità e qualità di informazioni che
possono essere ottenute dalla applicazione del modello matematico al problema in esame. Si va dai
modelli più semplici (e più antichi) in cui la descrizione si limita alle grandezze di campo medie, a
quelli più recenti in cui la descrizione è completa e può essere estesa alle grandezze di campo
fluttuanti e grandezze statistiche da esse derivate.
Completezza. Per completezza di un modello matematico si intende il fatto che il modello dipende
esclusivamente dalle caratteristiche fisiche del fluido: la densità ρ e la viscosità cinematica ν. In
altre parole un modello matematico completo non necessita alcuna specificazione aggiuntiva per
essere risolto. In realtà esiste un solo modello matematico completo: le equazioni di Navier-Stokes,
risolte direttamente, ossia senza applicare ad esse la decomposizione di Reynolds. Tale approccio,
molto recente, è contraddistinto dalla elevata onerosità dei calcoli e dalla mole di dati che fornisce.
Tutti gli altri modelli matematici, basati generalmente sulla decomposizione di Reynolds,
richiedono la definizione, attraverso le cosiddette relazioni di chiusura, dei termini contenenti le
grandezze fluttuanti.
Costo e facilità d’uso. Queste due caratteristiche dipendono da diverse variabili: dal tipo di
calcolatore elettronico disponibile, dalle risorse umane, dalla tipologia di problema da affrontare e
così via.
Campo di applicabilità. Non tutti i modelli sono applicabili a tutti i tipi di flusso. Vi sono anzi
alcuni modelli nati per affrontare categorie ben precise di problemi.
Accuratezza. L’accuratezza di un modello si può valutare esclusivamente attraverso il confronto
con i dati sperimentali. Infatti la definizione di un modello matematico non può non introdurre
semplificazioni e schematizzazioni della realtà che introducono inaccuratezze ed errori di maggiore
o minore rilevanza.
Nel seguito verranno illustrati i principali modelli matematici, tuttora in uso nello studio della
turbolenza. L’ordine espositivo che verrà seguito partirà dal modello più semplice e antico per
arrivare al più complesso e recente.
Modelli basati sulla viscosità turbolenta
Il punto di partenza è costituito dalla equazione RANSE (equazione 16, capitolo I):
(
)
∂u
+ u ⋅ ∇ u = −div pI − 2µ D + ρ u' ⊗u' + ρg
∂t
ρ
(1)
Come si è visto, unendo a questa equazione, l’equazione di continuità, si ottiene un sistema di
quattro equazioni, insufficiente a determinare le tre componenti della velocità media, la pressione e
le sei componenti del tensore di Reynolds. Nelle equazioni di evoluzione per le componenti del
tensore di Reynolds, compaiono dei nuovi termini incogniti, cubici nelle velocità di agitazione, che
rendono insufficienti le equazioni a disposizione. Questo processo si ripete indefinitamente: in altre
parole, ogni volta che si tenta di ottenere delle equazioni di evoluzione per grandezze incognite
contenenti le velocità fluttuanti, si ottengono ulteriori termini incogniti che rendono insufficienti le
equazioni a disposizione. Tale problema è detto appunto problema di chiusura, ossia l’equazione di
Reynolds di per sé non costituisce un modello completo per lo studio della turbolenza, ma deve
essere accompagnata dalle cosiddette relazioni di chiusura. La più semplice di queste relazioni di
chiusura si basa sull’idea che la turbolenza incrementa la tendenza a diffondere delle grandezze e
che in ogni caso per gli sforzi di Reynolds può essere introdotta una relazione di chiusura analoga
42
alla relazione costitutiva che si introduce per la parte residua del tensore degli sforzi. In altre parole,
si esprime il tensore di Reynolds come la somma della parte isotropa e della parte residua, che viene
assunta proporzionale, per ipotesi, alla parte simmetrica del tensore gradiente di velocità media:
2
3
ρ u' ⊗u' = ρK I − 2 ρν T D
(2)
Il coefficiente di proporzionalità è ν T , la viscosità turbolenta, anche nota nella letteratura
anglosassone come eddy viscosity. Quest’ultima è una funzione scalare positiva della posizione e
del tempo. Pertanto, nota la ν T , la definizione (2) può essere adottata nella equazione RANSE:
2
∂u
+ u ⋅ ∇ u = −div p + ρ K I − 2 ρ (ν +ν T )D + ρg
3
∂t
ρ
(3)
Si ottiene perciò una equazione di Navier-Stokes in cui la pressione risulta “corretta” tramite il
2
termine
ρK e la viscosità risulta definita dalla somma ν +ν T . Analogamente, si possono
3
introdurre relazioni di chiusura per i termini div θ ' u' , div c' u' rispettivamente della equazione di
bilancio dell’energia (equazione 39, capitolo I) e della equazione di evoluzione della sostanza
contaminante (equazione 49, capitolo I). Tali termini pongono un ulteriore problema di chiusura,
analogo a quello costituito dagli sforzi di Reynolds nella equazione RANSE. Per essi si adotta
l’ipotesi che i vettori θ ' u' ,c' u' siano espressi dalla applicazione dei tensori di diffusività turbolenta
della temperatura e della sostanza contaminante ai gradienti grad (Θ ), grad c . In particolare, in
analogia alla legge di Fourier sulla diffusione del calore e di Fick sulla diffusione molecolare, si
assume:
( ) ( )
()
θ ' u' = − Γ θ grad (Θ )
c' u' = −Γ c grad (c )
(4)
in cui Γ θ , Γ c sono i tensori di diffusività turbolenta della temperatura e della sostanza contaminante,
le cui componenti sono funzioni della posizione e del tempo. Nel caso più semplice:
Γ θ = Γ θ I, Γ C = Γ C I , ossia i tensori sono isotropi. Di conseguenza, le equazioni (39), trascurando i
termini dissipativi8, e (49) del I capitolo assumono la forma:
∂Θ
ρCv ∂t + div(ΘU ) = div((K + Γθ ) grad (Θ ))
∂c + div(c U ) = div((K + Γ )grad (c )) + Φ
c
c
c
∂t
(5)
Le relazioni di chiusura (2) e (4), come è stato visto richiedono la definizione delle funzioni scalari
ν T , Γθ ,ΓC . Tali funzioni dipendono dalla posizione e dal tempo, in modo strettamente legato al tipo
di moto che si sta esaminando e devono pertanto essere definite sperimentalmente. Tale fatto è
ovviamente un limite di tutti i modelli incompleti di turbolenza: per effettuare delle simulazioni
8
E’ possibile trascurare i termini viscosi nella equazione di bilancio della energia, poiché, come visto hanno ordine di
grandezza pari al numero di Eckert, che in generale assume valori molto piccoli rispetto all’unità.
43
numeriche è necessaria una calibrazione del modello, consistente nella definizione sperimentale di
alcune grandezze fondamentali.
Prima di addentrarci nella descrizione dei più importanti modelli basati sulla eddy viscosity si deve
fare un’importante osservazione sui limiti della loro applicabilità: tali limiti derivano precisamente
da una ipotesi che viene implicitamente posta alla base delle definizioni (2) e (4). Tale ipotesi
consiste nell’assumere che gli sforzi di Reynolds e i termini θ ' u' ,c' u' dipendano dalla parte
simmetrica del tensore gradiente della velocità media e dai gradienti della temperatura e
concentrazione media: tale fatto è ragionevole per quei flussi in cui il prodotto dell’ordine di
grandezza del tensore simmetrico della velocità media D0 con la scala temporale della turbolenza,
K
stimata con il rapporto dell’energia cinetica turbolenta media alla dissipazione
:
ε
K D0
(6)
ε
sia molto piccolo. Tale prodotto rappresenta il rapporto tra la scala temporale del moto turbolento e
K D0
<<1) la turbolenza “si adegua”
la scala temporale del moto medio: se è molto piccolo (
ε
rapidamente alla storia del moto medio e risulta ragionevole ritenere che le sue caratteristiche
K D0
∝ 1 ), la turbolenza non si
dipendano da quest’ultimo9. Se viceversa è abbastanza grande (
ε
adegua rapidamente alla storia del moto medio e non risulta ragionevole ritenere che le sue
caratteristiche dipendano dalle caratteristiche di quest’ultimo. Flussi in cui avvengano brusche
variazioni di geometria (ad es. il flusso in un convergente) costituiscono casi in cui l’ipotesi di
dipendenza del tensore di Reynods e dei termini θ ' u' ,c' u' dalle caratteristiche del moto medio non
è accettabile. Flussi in cui la geometria è regolare (ad esempio i flussi nelle condotte, le correnti a
superficie libera) viceversa costituiscono casi in cui l’ipotesi sopra vista è accettabile.
In termini di produzione e dissipazione dell’energia cinetica turbolenta media, si può affermare che
l’ipotesi di viscosità e diffusività turbolenta sia ragionevole nei casi in cui sussista un sostanziale
equilibrio istantaneo tra dissipazione ( ε = 2µ D' : D' ) e produzione ( P = ρ u' ⊗u' : D ), conseguente
al fatto che le caratteristiche della turbolenza variano lentamente seguendo le vicende del flusso
medio.
Nel seguito verranno esaminati i principali modelli basati sulle ipotesi (2), (4).
Viscosità turbolenta assegnata in funzione del campo di moto
Nei flussi bidimensionali liberi o confinati da pareti piane, caratterizzate da una geometria
estremamente regolare, il modello con viscosità turbolenta uniforme è dato dalla formula:
9
E’ interessante osservare che il rapporto tra la scala dei tempi del moto di agitazione molecolare e la scala dei tempi
del moto medio è sempre piccolissimo. Infatti tale rapporto è dato da:
l m D0 l mU
=
= Kn Ma , in cui l m ,c0 sono
c0
Lc0
rispettivamente il libero cammino medio di una molecola (lo spazio esistente tra due successive collisioni di una
molecola) e la celerità delle onde sonore nel mezzo. Il numero di Knudsen Kn è il rapporto tra il libero cammino medio
e la scala delle lunghezze del moto medio, mentre il numero di Mach Ma è il rapporto tra la scala delle velocità del
moto medio e la velocità del suono nel mezzo. Per l’aria in condizioni ordinarie si ha:
l m = 5.910 −8 m , c0 = 332 ms −1 e ipotizzando delle scale del moto medio unitarie, il prodotto KnMa risulta pari a:
KnMa=1.8 10-10. In altre parole, il moto molecolare si adegua rapidamente alle caratteristiche del moto medio e per tale
ragione è possibile ipotizzare, nella relazione costitutiva dei fluidi, che lo sforzo dipenda dalla parte simmetrica del
tensore gradiente della velocità.
44
ν T ( x , y ,t ) = u* ( x , y ,t )δ (x , y ,t )
(7)
in cui u* ,δ , funzioni della posizione, sono rispettivamente opportune scale della velocità e spaziale,
caratteristiche del moto di agitazione ed espresse in funzione del moto medio.
Analogamente, per le diffusività turbolente di temperatura e sostanze contaminanti, si possono
assumere delle espressioni simili alla (7):
Γθ ( x , y ,t ) = C θ ρCv u*δ = C θ ρCvν T
Γc (x , y ,t ) = C c u*δ = C cν T
(8)
in cui C θ ,C c sono delle costanti caratteristiche del flusso, da determinarsi sperimentalmente. Il
modello con viscosità turbolenta assegnata è estremamente semplicistico e può essere applicato, è
bene ripeterlo, solo ad alcuni flussi liberi, bidimensionali, in condizioni estremamente regolari.
Il modello può tuttavia essere migliorato rinunciando ad assumere le stesse funzioni scalari in ogni
direzione spaziale. In altre parole, si possono assumere diverse funzioni scalari nelle diverse
direzioni spaziali, riconoscendo il fatto che in determinate direzioni gli scambi diffusivi turbolenti
di quantità di moto, temperatura e sostanza contaminante sono più intensi che in altre.
Il modello della lunghezza di mescolamento
Il modello della lunghezza di mescolamento venne introdotto da Ludwig Prandtl nel 1925,
specificamente per descrivere la distribuzione di viscosità turbolenta in un flusso bidimensionale, in
cui la velocità media possiede una direzione prevalente.
Il punto di partenza della teoria della lunghezza di mescolamento è l’ipotesi che la viscosità
turbolenta possa essere posta nella forma:
ν T = lu*
(9)
ossia come il prodotto della lunghezza l per una opportuna velocità u* , il cui ordine di grandezza è
paragonabile a quello della velocità di agitazione. Nel modello della lunghezza di mescolamento la
lunghezza l può essere vista come la distanza che una particella fluida può percorrere mantenendo
costante la sua quantità di moto. Il concetto di lunghezza di mescolamento venne introdotto da
Prandtl grazie alla analogia con la teoria cinetica dei gas, in cui uno dei risultati fondamentali
consiste nel fatto che la viscosità cinematica di un fluido può essere espressa tramite il prodotto del
libero cammino medio delle molecole del fluido per la velocità del suono nel fluido. Il libero
cammino medio è la distanza che una molecola percorre tra un urto e il successivo.
La definizione (9) tuttavia pone il problema della definizione della lunghezza di mescolamento e di
u* . A tal proposito, è interessante illustrare il modo in cui si può procedere per ottenere delle stime
di tali parametri in funzione delle caratteristiche del moto medio. Si consideri (figura 1) un moto
piano, con vettore della velocità di componenti (u, v’) ossia tale che nella direzione x e alla quota y
la componente di velocità coincida con la sola parte media e che nella direzione y la componente di
velocità coincida con la sola parte fluttuante. Le componenti in direzione x dei flussi di quantità di
moto attraverso le superfici poste in y+ℓ, y-ℓ, aventi area A e normali entranti n, con direzione
parallela all’asse y, sono date da:
45
du
M y + l ⋅ e x = − ρv' u ( y + l )A ≈ − ρv' u ( y ) +
l A
dy y
du
l A
M y −l ⋅ e x = ρv' u ( y − l )A ≈ ρv' u ( y ) −
dy
y
(10)
La risultante di tali flussi, è pertanto pari a:
M y + l ⋅ e x + M y −l ⋅ e x = −2 ρv'
du
lA
dy y
(11)
che può essere vista come l’azione dello sforzo
τ yx = −2 ρv'
du
l
dy y
(12)
sulla superficie A, posta a quota y. Dalla formula (12), si può dedurre che una stima della
componente di velocità fluttuante in direzione x sia data da:
u' ≈ −
du
l
dy y
(13)
Per caratterizzare completamente lo sforzo risultante dal flusso della quantità di moto, Prandtl
ipotizzò, in analogia alla (13) e sulla base di considerazioni dimensionali, che:
v' = cos t l
du
dy
(14)
Di conseguenza, conglobando il fattore 2 che appare nella (12), nella costante della (14), e
mediando rispetto al tempo si ottiene:
τ yx = − cos t ρl 2
du du
dy dy
(15)
Dalla (15) risulta chiaro il motivo di adottare il modulo nella (14): il segno dello sforzo (15) può
così variare al variare del segno del gradiente della velocità media. Lo sforzo calcolato con la (15)
può essere identificato con la componente ρ u' v' degli sforzi di Reynolds:
ρ u' v' = − cos t ρl 2
du du
dy dy
(16)
Confrontando la (2) con la (16), si ottiene la seguente formula per la viscosità turbolenta:
46
ρ u' v' = −2 ρν T
1 du
du du
= − cos t ρl 2
2 dy
dy dy
y
⇒ ν T = cos t l 2
v’
du
dy
(17)
n
u(y+ℓ)
ℓ
u(y)
ℓ
v’
n
u(y-ℓ)
x
Figura 1. Schema di riferimento per il modello della lunghezza di mescolamento
E’ possibile infine conglobare ulteriormente la costante di proporzionalità nella definizione della ℓ,
cosicché la (16) e la (17) divengono:
ρ u' v' = − ρl 2
du du
du
,ν T = l 2
dy dy
dy
(18)
Si osservi che in una corrente uniforme sopra una parete piana, lo sforzo (18) è negativo, poiché
du
> 0 , di conseguenza è tale da sottrarre potenza al moto medio e cederla al moto di agitazione: il
dy
termine di produzione nella equazione di bilancio dell’energia cinetica media:
2
du du
ρ u' ⊗u' : D = − ρl
dy dy
2
assume infatti valore negativo ed è pertanto un termine pozzo.
L’utilizzo pratico del modello della lunghezza di mescolamento prevede ovviamente l’assegnazione
della l , tramite formule empiriche, dedotte prevalentemente dalle misure sperimentali.
Il modello della lunghezza di mescolamento è stato applicato con buoni risultati a flussi molto
semplici: sostanzialmente bidimensionali, stazionari, confinati da pareti piane e caratterizzati da una
direzione prevalente del moto (ad esempio moti in condotta, in canali a superficie libera, etc.). Vi
sono stati anche dei tentativi di generalizzarlo a flussi più complessi adottando come definizione
della viscosità turbolenta la:
ν T = l 2 2D : D
(19)
1 du
. Nella sua forma
2 dy
generalizzata (19), il modello della lunghezza di mescolamento è applicabile (in teoria) a tutti i
flussi turbolenti ed è indubbiamente il più semplice tra i modelli di turbolenza che abbiano dato
risultati di un certo rilievo.
Il modello della lunghezza di mescolamento si adotta anche per le diffusività turbolente della
temperatura e delle specie contaminanti, tramite le formule (8), con la solita avvertenza che
C θ ,C c sono delle costanti caratteristiche del flusso, da determinarsi sperimentalmente.
che si riduce alla (18), nel caso in cui l’unico componente di D sia
47
Si deve sottolineare il fatto che l’analogia alla base del modello della lunghezza di mescolamento
tra il libero cammino medio di due molecole e la lunghezza di mescolamento tra due particelle
fluide è solo qualitativamente accettabile: infatti il libero cammino medio ha un ordine di grandezza
sempre notevolmente inferiore a quello delle dimensioni del flusso, mentre la lunghezza di
mescolamento può raggiungere dimensioni paragonabili a quelle del flusso. Inoltre - ma questa è
una critica generalizzata al modello della viscosità turbolenta - secondo la (2) il tensore degli sforzi
di Reynolds è proporzionale, tramite una costante scalare, alla parte simmetrica del tensore
gradiente di velocità media, ossia è costantemente allineato con quest’ultimo, e non dipende dalla
storia passata della deformazione subita dal flusso. La formula (2) sarebbe valida se il numero di
Knudsen formato con la lunghezza di mescolamento e una dimensione caratteristica del moto
l
medio: Kn = fosse sufficientemente piccolo (Kn<<1). Una ulteriore critica che si può rivolgere al
L
modello della lunghezza di mescolamento consiste nel fatto che non è vero che la particella fluida
conserva la sua quantità di moto per una distanza pari ad ℓ, ma scambia quantità di moto con
continuità, percorrendo la distanza ℓ. Per eliminare il vincolo dell’allineamento si può differenziare
il valore della eddy viscosity in funzione della direzione: in tal modo la componente cartesiana del
tensore di Reynolds, identificata dagli indici ij, verrebbe ad essere definita
2
dalla: ρ ui' u 'j = ρ K δ ij − 2 ρν T ij Dij . La difficoltà di una definizione siffatta consiste nel dover
3
introdurre un numero di eddy viscosities ν T ij pari a quello delle componenti cartesiane del tensore
di Reynolds. Il beneficio ricevuto inoltre, in termini di migliore attendibilità nella descrizione del
flusso, non è pari al costo in termini di complicazione del modello. Analogo ragionamento vale per
le diffusività turbolente.
Tali critiche sono utili per comprendere come un modello di turbolenza possa essere applicato allo
studio di certi fenomeni e non ad altri, anche se, essendo empirica la base del modello e
demandandone la completa definizione a prove sperimentali, la verifica del modello va fatta in
ultima analisi “sul campo” ossia applicandolo eventualmente anche a casi di dubbia applicabilità e
verificandone i risultati. A tal proposito va detto che il modello della lunghezza di mescolamento si
comporta in modo eccellente nel riprodurre la turbolenza di parete, sempre che le condizioni di
applicazione non siano troppo distanti da quelle di calibrazione.
Il modello K o modello ad 1 equazione.
Adottando la definizione (9) per la viscosità turbolenta, si è visto che il problema di definire il
modello di turbolenza consiste nella definizione della lunghezza di mescolamento l e della velocità
u* . Seguendo il ragionamento fatto in precedenza si perviene alle stime (13), (14) secondo le quali
l’ordine di grandezza della velocità di agitazione dipende dal gradiente della velocità media. Se tale
gradiente è nullo anche la velocità di agitazione deve essere tale. In realtà ci sono diverse
circostanze in cui questo fatto non si verifica. Partendo dalla definizione della scala della velocità
u* si può evitare questa incongruenza e migliorare il modello. A tale scopo Kolmogorov (1942) e
Prandtl (1945) suggerirono la seguente definizione per u* :
u* = a K
(20)
in conseguenza della quale si ottiene la seguente definizione della viscosità turbolenta:
νT = a K l
(21)
48
in cui a è una costante di proporzionalità. Affinché la definizione (21) sia utilizzabile, devono
essere assegnate le funzioni K , l e la costante a. Per quanto riguarda l ed a si procede come nel
caso precedente: entrambe vengono determinate sperimentalmente. Per la determinazione di K
Kolmogorov e Prandtl proposero di usare l’equazione di evoluzione della energia cinetica
turbolenta media (equazione (17), capitolo II):
∂K
1
+ u ⋅ ∇K = − div u' K + p' u' − 2ν D' u' − 2ν D' : D' − u' ⊗u' : D
∂t
ρ
(22)
Il percorso logico che si segue nel presente modello è pertanto il seguente:
•
•
•
•
•
viene assegnata la funzione l ;
viene risolta l’equazione (22);
viene definita la viscosità turbolenta (21);
vengono di conseguenza definiti gli sforzi di Reynolds tramite la (2);
vengono risolte l’equazione di Reynolds (3) e l’equazione di continuità nelle incognite
velocità e pressione media, tenendo conto quest’ultima anche del contributo della parte
2
isotropa del tensore degli sforzi di Reynolds: p + ρK
3
Poichè viene introdotta l’equazione (22) per l’incognita K , il modello viene anche detto ad una
equazione. L’equazione (22) in ogni caso necessita l’adozione di opportune ipotesi semplificative e
di chiusura per quanto riguarda il primo termine a primo membro e il termine dissipativo. Per
quanto riguarda quest’ultimo, si osservi che una stima opportuna del suo ordine di grandezza è data
da:
u*3
ε = 2ν D' : D' ∝
l
( K)
3
⇒ ε = CD
(23)
l
in cui C D è il coefficiente di proporzionalità della dissipazione.
Per quanto riguarda il primo termine a primo membro, si ricordi che rappresenta la divergenza del
1
vettore flusso di energia: u' K + p' u' − 2ν D' u' . In analogia alla legge di Fourier sul flusso di
ρ
calore, è possibile ritenere tale vettore flusso di energia parallelo al gradiente di energia cinetica
turbolenta media:
u' K +
1
ρ
p' u' − 2ν D' u' = −
( )
νT
grad K
σK
(24)
in cui σ K è il rapporto della viscosità turbolenta al coefficiente di diffusività turbolenta della energia
cinetica turbolenta media, indicato nella (18) da
νT
. Il rapporto della viscosità (turbolenta o meno)
σK
al coefficiente di diffusività della grandezza considerata, prende il nome di numero di Prandtl. σ K è
il numero di Prandtl della energia cinetica turbolenta media e ha ordine di grandezza unitario. In
definitiva l’equazione (16) diviene:
49
ν
∂K
+ u ⋅ ∇K = div T grad K
σ
∂t
K
32
K
−C
+ 2ν T D : D
D
l
( )
(25)
in cui le grandezze assegnate sono la lunghezza di mescolamento e il coefficiente di proporzionalità
della dissipazione C D .
Il fatto di dover assegnare la lunghezza di mescolamento costituisce il maggior limite del modello
ad una equazione.
Il modello K ,ε o modello a 2 equazioni.
Il modello K ,ε appartiene alla classe dei modelli a due equazioni, in cui vi sono due equazioni di
evoluzione per altrettante quantità turbolente. Il più noto ed usato tra essi è il modello K ,ε, in cui le
quantità turbolente sono precisamente l’energia cinetica turbolenta media e la dissipazione
viscosa ε = 2ν D' : D' . Il vantaggio di questo modello rispetto al modello della lunghezza di
mescolamento o al modello ad una equazione è costituito dal fatto che non risulta più necessario
assegnate la lunghezza di mescolamento: in tal senso il modello presenta un maggior grado di
completezza rispetto ai modelli appena esaminati.
Il punto fondamentale del modello K ,ε consiste nel fatto che la viscosità turbolenta può essere
espressa, eliminando la lunghezza di mescolamento tra la (21) e la (23), dalla:
ν T = aC D
K
ε
2
= Cµ
K
2
(26)
ε
in cui C µ = aC D , costante di proporzionalità.
L’equazione di evoluzione per K è la (24). L’equazione di evoluzione per la dissipazione viscosa,
può essere ricavata esattamente, applicando la seguente operazione all’equazione di Navier-Stokes:
2ν
∂ui
∂u' i ∂ ∂ui
∂u 1 ∂p
+ uk ⋅ i +
− 2ν
− ρg i = 0
∂x j ∂x j ∂t
∂xk ρ ∂xi
∂xk ∂xk
(27)
∂u' i
, sommando sugli indici i,j e
∂x j
mediando rispetto al tempo. Vale la pena soffermarsi sul primo termine:
ossia derivando l’equazione rispetto ad xj, moltiplicandola per
2ν
∂u' i ∂ ∂ui
∂u' i ∂ ∂ui
1 ∂ ∂ui ∂u' i
1 ∂ ∂ui ∂u' i 1 ∂ε
= 2ν
=
=
=
2ν
2ν
∂x j ∂x j ∂t
∂x j ∂t ∂x j
2 ∂t ∂x j ∂x j
2 ∂t ∂x j ∂x j 2 ∂t
(28)
1
, tale termine fornisce la derivata locale rispetto al tempo della dissipazione
2
viscosa. Lo sviluppo degli altri termini, pur non presentando particolari difficoltà, è estremamente
farraginoso e fornisce i termini corrispondenti alla produzione, dissipazione, diffusione
molecolare e trasporto turbolento della dissipazione viscosa, estremamente difficili, se non
impossibili, da misurare e dunque da modellare. Questa difficoltà d’altra parte è connessa al fatto
che si cerca di modellare con il moto medioa (a grande scala) processi che invece sono caratteristici
delle piccole scale. Per questo motivo, al posto della equazione evolutiva della dissipazione viscosa
A parte il fattore
50
esatta si preferisce usare una equazione empirica basata sul fatto che la dissipazione viscosa viene
sostanzialmente determinata, attraverso il processo della cascata di energia, dai moti a grande scala,
contenuti nell’energy containing range, la cui evoluzione è indipendente dalla viscosità. Di
conseguenza viene definita, nell’ambito dei moti a grande scala, la seguente equazione empirica per
la dissipazione viscosa:
ν
∂ε
℘ε
ε2
+ u ⋅ ∇ε = div T grad (ε ) + Cε 1
− Cε 2
∂t
K
K
σε
(29)
in cui ℘ = 2ν T D : D . Il modello deve essere corredato dai valori numerici delle cinque costanti
empiriche: C µ ,σ K ,σ ε ,Cε 1 ,Cε 2 , la determinazione delle quali, così come la definizione
completamente empirica della equazione per la dissipazione viscosa, costituiscono i punti deboli del
modello K ,ε. Tale modello peraltro è il più semplice tra i modelli che non necessitano
l’assegnazione di funzioni del moto come la lunghezza di mescolamento o la velocità di agitazione
e per questo è stato applicato ad una vasta gamma di problemi nell’ambito della meccanica dei
fluidi. La sua accuratezza è tuttavia discutibile: è accettabile per flussi semplici, ma può divenire del
tutto insufficiente per flussi complessi, al punto che le caratteristiche del flusso medio possono
essere erroneamente calcolate. In ogni caso, miglioramenti possono essere ottenuti, rinunciando ad
adottare valori universali per le cinque costanti e calibrandole opportunamente per il problema
esaminato. E’ chiaro però che gli aggiustamenti ad hoc per il tipo di flusso in considerazione
rivelano la debolezza intrinseca del modello. Un modello completo, di robusta validità dovrebbe
ammettere una singola specificazione delle costanti e valere per una classe di moti sufficientemente
ampia. In generale, nelle correnti applicazioni del modello si rinuncia alla massima accuratezza
ottenibile adottando però una determinazione delle costanti “pseudo universale” che cioè permette
di ottenere una accuratezza accettabile per una vasta serie di flussi.
Applicazioni. Flussi liberi e di parete
Prima di passare in rassegna (nel prossimo capitolo) modelli di turbolenza più complessi, è
opportuno soffermarsi sull’analisi teorica e sperimentale delle configurazioni più semplici dei flussi
turbolenti. Questi sono praticamente i flussi liberi dominati da gradienti trasversali (free shear
flows), che avvengono lontano da pareti solide, e i flussi di parete che avvengono in prossimità di
pareti solide. I primi sono i getti, le scie e gli strati di mescolamento, che si verificano quando due
strati fluidi a differenti velocità entrano in contatto. I secondi sono i flussi nelle condotte in
pressione, nei canali a superficie libera e i flussi di strato limite.
1. Flussi liberi.
In figura 2a,b,c sono riportati i principali tipi di flussi liberi: il getto (jet), lo strato di mescolamento
(mixing layer) e la scia a valle di un ostacolo (wake).
51
Fig.2. Le configurazioni più comuni di flussi liberi piani: a) getto; b) strato di mescolamento; c) scia.
In figura 2 sono riportate delle configurazioni piane. Per quanto riguarda il getto e la scia, si
possono considerare anche configurazioni a simmetria assiale.
Tali configurazioni, per quanto schematiche, possono rappresentare flussi di notevole interesse
pratico. A titolo di esempio si consideri che possono essere assimilati ai getti tutti i casi in cui vi è
l’immissione di un fluido, con quantità di moto non trascurabile, in un altro fluido, come lo scarico
da una condotta in un bacino in quiete, il fumo che fuoriesce da una ciminiera etc. Il caso
dell’immissione di un fluido, con quantità di moto trascurabile, in un altro fluido viene definito
pennacchio (plume); la sua considerazione è pure di elevato interesse tecnico, soprattutto nelle
problematiche ambientali. Nel seguito verranno presi dettagliatamente in esame alcuni esempi di
flussi liberi e di parete.
Getto assialsimmetrico
Consideriamo la configurazione illustrata in figura 3.
Figura 3. Il getto assialsimmetrico.
52
Una data portata di fluido Q = U I
πd 2
viene immessa attraverso l’ugello (nozzle) di diametro d in
4
un ambiente in cui vi è fluido in quiete. La distribuzione di velocità sulla sezione di uscita
dell’ugello è praticamente uniforme: il profilo di velocità è pertanto rettangolare con massimo
valore U I . Stante la simmetria della configurazione, si assume che il vettore velocità media non
dipenda dalla coordinata angolare θ e abbia componente nulla rispetto a tale direzione:
u = {U ( x , r ),V ( x , r ),0} . Inoltre, sull’asse di simmetria anche la componente radiale della velocità
media dovrà annullarsi. Si indica con U 0 ( x ) la componente della velocità media secondo la x
sull’asse di simmetria. Da un punto di vista qualitativo, la velocità media del getto decresce al
crescere della x e di r, mentre la dimensione radiale del getto cresce al crescere della x. Inoltre al
crescere della x il profilo della componente di velocità U si modifica gradualmente a partire dalla
forma rettangolare che possiede nella sezione di uscita. Misurando la distanza dalla sezione di
uscita in numero di diametri di quest’ultima, a partire da x≈30d il profilo di velocità assume una
forma, che viene poi mantenuta costante. Come dimensione caratteristica in direzione radiale è
opportuno assumere la cosiddetta metà ampiezza del getto, definita, per una data x, come la
coordinata radiale r1 2 ( x ) in corrispondenza della quale la velocità sull’asse di simmetria si dimezza:
1
U (x , r1 2 ( x )) = U 0 ( x )
2
(30)
In figura 4 si possono osservare i profili sperimentali della componente secondo x della velocità
media rapportati alla velocità di ingresso: U=U(x, r)/ UI, per differenti valori del rapporto x/d. E’
interessante osservare che, per x>30d (zona di pieno sviluppo del getto) l’intensità della velocità
sull’asse di simmetria decresce, mentre il getto si espande ed aumenta la sua direzione caratteristica
radiale.
Figura 4. Profili della componente di velocità secondo r rapportati alla velocità di ingresso: U=U0(x, r)/ UI in
corrispondenza di differenti valori del rapporto x/d.
53
Figura 5. Il profilo autosimile della velocità.
In figura 5 vengono riportate le misure sperimentali della velocità rapportata al valore assiale locale
U (x , r )
r
f =
in funzione della coordinata ξ =
, effettuate in corrispondenza di diversi valori di
U 0 (x )
r1 2 ( x )
r, per valori della x compresi nell’intervallo 40<x/d<100: si nota come tutte le misure ricadono
sull’unica curva f = f (ξ ) . In altre parole, per 40<x/d<100 il profilo della componente di velocità
secondo x diviene autosimile.
Osserviamo ora il comportamento sperimentale del getto in merito alla diminuzione della velocità
sull’asse di simmetria all’aumentare della distanza dalla sezione di ingresso. In figura (6) vengono
diagrammati i dati sperimentali (puntini) del rapporto tra la velocità di ingresso UI e la velocità
sull’asse di simmetria U0(x) in funzione della distanza dalla sezione di ingresso x/d. Si nota in
pratica come l’inverso della velocità ha un’andamento lineare rispetto ad x/d: il che vuol dire che
U 0 (x )
B
=
, con B
l’andamento della U0(x) è inversamente proporzionale ad x/d. Si pone:
UI
xd
costante di proporzionalità. L’aumento della direzione caratteristica r1 2 ( x ) è invece linearmente
proporzionale ad x/d. Si pone r1 2 ( x ) = Sx , con S costante di proporzionalità. Il numero di Reynolds
locale del getto definito dalla:
r1 2 ( x )U 0 (x )
ν
= BS
UId
(31)
ν
è pertanto indipendente da x e proporzionale al numero di Reynolds del getto (definito con le
U d
grandezze di ingresso): Re = I
ν
54
Figura 6. Andamento della
UI
in funzione di x/d.
U 0 (x )
Il profilo autosimile e le costanti B, S non dipendono dal numero di Reynolds del getto.
All’aumentare del numero di Reynolds del getto, la separazione tra le scale aumenta, ma le
caratteristiche macroscopiche di quest’ultimo restano costanti. In figura (7) vengono mostrate due
immagini sperimentali di un getto realizzato a differenti numeri di Reynolds. Come si vede,
l’apertura del cono resta la medesima, mentre le scale spaziali dei moti di agitazione si riducono.
Figura 7. Getti sperimentali. a) Re=5000, b) Re=20000
55
Si è trovato generalmente che S=0.1, B=6.
Vediamo ora il comportamento sperimentale degli sforzi di Reynolds. Si deve intanto osservare che
il vettore velocità di agitazione presenta tutte e tre le componenti: u' = {u' , v' , w' } . Una misura
dell’ordine di grandezza di queste è data dalla:
u'0 =
(u' )
2
(32)
r =0
L’evidenza sperimentale ha mostrato che, nella zona di getto pienamente sviluppato, il rapporto
u'0
è costante: dal che si deduce che anche la u'0 decade come la U 0 ( x ) all’aumentare della x.
U 0 (x )
Tale comportamento si ha però solo sull’asse di simmetria: infatti, all’aumentare della distanza
u'
radiale dall’asse, la u' decade, ma il rapporto
aumenta senza limiti all’aumentare di r: segno
U (x , r )
evidente del fatto che il moto medio tende ad annullarsi più rapidamente del moto di agitazione
avvicinandosi al bordo del getto.
Il tensore degli sforzi di Reynolds, per motivi di simmetria, assume la seguente forma, nel sistema
di riferimento illustrato in figura 3:
(u' )2
u' ⊗u' = u' v'
0
u' v'
(v' )
2
0
0
0
(w' )2
(33)
Le misure sperimentali (figura 8) degli sforzi di Reynolds, mettono in evidenza un comportamento
autosimile. In altre parole, gli andamenti delle componenti del tensore di Reynolds, rapportate al
u'i u' j
quadrato della velocità media sull’asse di simmetria: 2 dipendono esclusivamente da
U 0 (x )
r
.
ξ=
r1 2 ( x )
Figura 8. L’andamento autosimile degli sforzi di Reynolds.
56
Si può notare che le componenti (u' ) ,(v' ) ,(w' ) dello sforzo di Reynolds, pur avendo lo stesso
ordine di grandezza, presentano valori diversi, segno del fatto che il tensore di Reynolds è
dU
anisotropo. La componente u' v' , per 0<ξ<2.0, è positiva, laddove
è negativo e tende a zero con
dr
r. Si può pertanto porre:
2
u' v' = −ν T
2
2
dU
dr
(34)
Visti gli andamenti autosimili di U, u' v' , anche la viscosità turbolenta ν T avrà andamento
autosimile. Si può anzi porre:
)
ν T = U 0 ( x )r1 2 (x )ν T (ξ )
(35)
)
)
in cui ν T (ξ ) è il profilo normalizzato. In figura 9, si mostra che ν T (ξ ) è praticamente costante per
0 < ξ < 1 ⇒ 0 < r < r1 2 . Per valori di r crescenti tende a zero.
Figura 9. Andamento autosimile della viscosità turbolenta normalizzata.
Basandoci ora sulle evidenze sperimentali sinora mostrate, vediamo come avvalersi dei modelli di
turbolenza esaminati. Di particolare utilità sembrerebbe essere in questo caso il modello con
viscosità turbolenta uniforme. Consideriamo allora le equazioni di continuità e di Reynolds, nel
riferimento di coordinate cilindrico:
∂U 1 ∂ (rV )
=0
+
∂x r ∂r
∂ 2U 1 ∂ ∂U ∂ (u' )2 1 ∂ r u' v'
1 ∂pd
∂U
∂U
−
=−
+ ν 2 +
+V
r
−
U
ρ ∂x
∂x
∂r
r ∂r
r dr ∂r
∂x
∂x
2
2
2
U ∂V + V ∂V = − 1 ∂pd + ν ∂ V + 1 ∂ r ∂V − V − ∂ u' v' − 1 ∂ r (v' ) + (w' )
2
∂x 2 r dr ∂r
∂x
ρ ∂r
∂x
∂r
r ∂r
r
r
(
( )
57
)
( )
(36)
In tali equazioni si è considerata la decomposizione della pressione in pressione dinamica p d e
pressione idrostatica − ρgx . Quest’ultimo contributo elimina il termine delle forze di corpo nella
prima equazione: si ricordi che la direzione x coincide con l’asse del getto, supposta orientata
verticalmente verso l’alto. Si possono ora introdurre alcune semplificazioni. Innanzitutto si deve
notare che la componente radiale V della velocità media, responsabile dell’allargamento del getto, è
piccola rispetto alla componente assiale U. In secondo luogo, si deve notare che le derivate delle
grandezze, calcolate rispetto alla coordinata radiale r, sono molto maggiori delle derivate calcolate
rispetto alla coordinata assiale x10, poiché le variazioni delle grandezze rispetto alla coordinata
radiale r, sono molto maggiori delle variazioni rispetto alla coordinata assiale x, a parità di entità
della variazione. Ne consegue che la terza equazione (36) assume la forma:
( )
∂ r (v' )
1 ∂pd 1
2
= (w' ) −
ρ ∂r r
∂r
2
(37)
dalla quale si può ricavare l’andamento della pressione media rispetto al raggio:
pd
ρ
=
pd 0
ρ
+∫
(w' )2 − (v' )2 dr' −(v' )2
(38)
r'
in cui pd 0 è la pressione media esterna al getto, determinata dalle condizioni del fluido esterno ad
esso. Se il fluido esterno al getto è in quiete, pd 0 è nulla. Assumiamo senz’altro per vera tale ipotesi,
e applichiamo le semplificazioni viste alla prima equazione:
U
(
∂U
∂U
1 ∂ ∂U 1 ∂ r u' v'
=ν
+V
−
r
∂x
∂r
r dr ∂r r ∂r
)
(39)
E’ ora possibile introdurre il modello di turbolenza, sfruttando contemporaneamente le proprietà di
similitudine dei profili di velocità media, della viscosità turbolenta e gli andamenti di r1 2 ,U 0 rispetto
ad x:
∂U
ν
=
−
u
'
v
'
T
∂r
)
(
)
ν
=
U
x
r
0
1 2 ( x )ν T (ξ )
T
U = U ( x ) f (ξ )
0
V = U (x )h(ξ )
0
r1 2 ( x ) = Sx
U ( x ) = B U I
0
xd
(40)
Conviene inoltre introdurre la funzione di corrente ψ :
10
Tali semplificazioni coincidono praticamente con le classiche ipotesi di strato limite.
58
)
ψ = U 0 ( x )r1 2 ( x )ν T (ξ )xF (ξ )
1 ∂ψ
U =
r ∂r
1 ∂ψ
V = − r ∂x
(41)
ed esprimere, in funzione di questa, le componenti della velocità media e le loro derivate spaziali
nella equazione (39), in cui sia stato adottato il modello di turbolenza (40):
U
∂U
∂U
∂U
1 ∂ ∂U 1 ∂
)
=ν
+V
r
+
rU 0 ( x )r1 2 ( x )ν T (ξ )
∂r
∂r
∂x
r dr ∂r r ∂r
(42)
)
Naturalmente deve essere specificata la forma della ν T (ξ ) : per semplicità è possibile considerare un
valore costante, valido almeno per ξ ≤ 1 (figura 9).
Si perviene, dopo calcoli piuttosto onerosi, ma concettualmente semplici, alla seguente equazione
differenziale ordinaria del terzo ordine avente per incognita la funzione F=F(ξ).
F' ' ' ξ 2 − F' ' ξ + F' +ξ 2 F' F' ' +(ξF' ' − F' )(F − ξF' ) = 0
in cui ovviamente F' =
2
(43)
3
dF
d F
d F
, F' ' ' =
, F' ' =
.
2
dξ
dξ
dξ 3
Due condizioni al contorno per l’equazione (43) sono le seguenti
F (0 ) = F' (0 ) = 0
(44)
)
BSU I dν T
(F − ξF' ) si deve annullare in
corrispondenti al fatto che la velocità radiale: V = −
r
corrispondenza dell’asse del getto. Una soluzione della equazione differenziale (43), soddisfacente
la condizione (44), è data dalla funzione:
4a(Sξ )
F (ξ ) =
2
1 + a(Sξ )
2
(44)
con a costante di integrazione. Applicando la seconda definizione (41) si ottiene:
U=
8 aν T
1
x 1 + a ( Sξ ) 2
(
da cui U 0 ( x ) =
(45)
)
2
8aν T
1
, f (ξ ) =
2
x
1 + a ( Sξ )
(
)
2
1
. Per determinare la a si osservi che per ξ = 1,U = U 0 ,
2
pertanto:
a=
2 −1
≈ 41.42
S2
(46)
59
)
Infine è possibile determinare il valore della costante ν T (ξ ) , tramite la definizione stessa della
S
8aν T 8a
1
)
)
viscosità turbolenta: U 0 ( x ) =
= U 0 ( x )r1 2 ( x )ν T (ξ ) ⇒ ν T (ξ ) =
=
. passando
x
x
8aS 8 2 − 1
ai valori numerici si ha:
(
)
νT =
)
S
≈ 0.03
8 2 −1
(
)
Il valore trovato è in ottimo accordo con quello misurato sperimentalmente e riportato in figura 9.
Si noti infine, in figura 10, il confronto tra i profili autosimili, sperimentale (tratto continuo) e
analitico (tratteggio) della componente di velocità U.
Figura 10. Confronto tra il profilo autosimile sperimentale (tratto continuo) e analitico (tratteggio).
Si vede chiaramente che l’ipotesi di mantenere costante la viscosità turbolenta normalizzata
)
ν T (ξ ) perde di validità all’aumentare della coordinata radiale, in accordo al fatto che, all’aumentare
)
di quest’ultima,ν T (ξ ) non può più essere considerata costante.
La componente V della velocità media può essere ricavata dalla equazione di continuità. Infatti,
posto V = U 0 ( x )h(ξ ) , dalla equazione di continuità (36) si ottiene:
d (ξf (ξ ))
d (h(ξ )ξ )
= Sξ
dξ
dξ
(47)
che può essere facilmente integrata per ottenere il profilo autosimile della componente di velocità V.
Si ottiene:
h = Sξ
1 − a(Sξ )
(
2
2 1 + a(Sξ )
(48)
)
2 2
Con i valori considerati per le costanti a, S si ottiene il profilo riportato in figura 11:
60
Figura 11. Profilo autosimile della componente di velocità V
Si noti come l’ordine di grandezza della V sia notevolmente inferiore a quello della U (la massima
ampiezza di quest’ultima è circa 50 volte la massima ampiezza della V). Inoltre la V diviene
negativa avvicinandosi al bordo del getto, indicando il fatto che il fluido circostante al getto viene
immesso nel getto stesso, dando luogo ad un flusso – debole ma finito – di fluido dall’esterno
all’interno del getto, noto in letteratura come flusso di entrainment.
Trasporto di scalare in un getto
Il getto può trasportare una sostanza contaminante, la cui concentrazione è indicata con C, oppure
può avere all’ingresso una temperatura diversa da quella del fluido ambiente. E’ interessante vedere
come, applicando il modello della diffusività turbolenta assegnata in funzione del campo di moto,
sia possibile pervenire alla determinazione analitica del profilo di concentrazione. A tale scopo si
consideri l’equazione (5), unitamente alla definizione (8), per il trasporto della sostanza
contaminante, scritta nel riferimento cilindrico, avendo adottato le semplificazioni già viste nel caso
precedente:
U
∂C
∂C 1 ∂
∂C
r (K C + C cν T )
+V
=
∂x
∂r r ∂r
∂r
(49)
Si è supposto Φ C = 0 , ossia non vi sono rilasci di sostanza all’interno del getto: quest’ultimo
immette e trasporta la sostanza, la cui concentrazione media è C . L’equazione (49) è la tipica
equazione di trasporto per la quantità scalare passiva C : ossia la C , nell’ambito delle ipotesi poste,
non è in grado di modificare il campo di velocità, mentre quest’ultimo determina la distribuzione
della concentrazione. Per risolvere l’equazione (49) si deve ipotizzare che la concentrazione C
possa essere espressa dalla:
C = C0 ( x )χ (ξ )
(50)
essendo C 0 ( x ) la concentrazione in corrispondenza dell’asse del getto e χ (ξ ) il profilo autosimile di
concentrazione. Inoltre si può ipotizzare che l’andamento di C 0 ( x ) sia assimilabile a quello della
U 0 ( x ) e pertanto:
61
C 0 (x ) =
C
x
(51)
essendo C una costante di proporzionalità. Sostituendo la definizione della V: V = U 0 ( x )h(ξ ) ,
essendo h data dalla (48), la definizione della U (45) e infine le posizioni (50) e (51), si ottiene la
seguente equazione differenziale ordinaria del secondo ordine per il profilo autosimile della
concentrazione:
U 0 ( x )(h(ξ )χ' ξ − Sf (ξ )ξ (χ + χ' ξ )) =
KT
(χ' + χ' ' ξ )
r1 2 ( x )
K
⇒ U I Bd (h(ξ )χ' ξ − Sf (ξ )ξ (χ + χ' ξ )) = T (χ' + χ' ' ξ )
S
(52)
Nell’integrare si devono imporre le seguenti condizioni:
χ (0) = 1
χ'
ξ =0 = 0
(53)
che indicano il fatto che la concentrazione è massima sull’asse. L’andamento della χ (ξ ) è illustrato
in figura (12). Come si vede è simile a quello della f (ξ ) , sebbene la curva a campana della
concentrazione risulti più “larga” di quella della velocità. In ogni caso si nota come il modello a
viscosità turbolenta costante funzioni bene per il caso del getto anche per quanto riguarda la
concentrazione di sostanza contaminante.
2. Flussi di parete.
I flussi di parete si distinguono in flussi interni (flussi in condotte e in canali a superficie libera) ed
esterni (flussi attorno a superfici). In quest’ambito verranno presi in considerazione flussi del primo
tipo per la loro importanza nell’Idraulica.
Flusso in condotte
Si consideri (figura 13) una condotta avente sezione circolare, di diametro D e lunghezza L, tale che
L/D>>1. Si consideri inoltre un sistema di riferimento cilindrico (figura 13), tale che l’asse di
simmetria della condotta coincida con l’asse x; quest’ultimo identifica la direzione prevalente del
moto. Il vettore velocità media ha come unica componente non nulla quella diretta secondo l’asse x:
u ≡ {U,0,0}.
62
Figura 12. Profilo autosimile della velocità analitico (tratto continuo) e sperimentale (punti neri) a confronto con il
profilo autosimile della concentrazione analitico (tratto discontinuo) e sperimentale (punti bianchi)
Si può ipotizzare che, ad una distanza sufficiente dall’origine della condotta, dove ha inizio il
movimento, il flusso si sviluppi completamente e tutte le statistiche legate alla velocità non
dipendano dalla coordinata x.
U
r
D
θ
z
x
L
z=0
Figura 13. Lo schema di riferimento della condotta.
Inoltre, per evidenti motivi di simmetria il vettore velocità media non dipenderà dalla coordinata
circonferenziale θ: pertanto il vettore velocità media dipenderà esclusivamente dalla coordinata
radiale.
Per caratterizzare il moto si adotta il numero di Reynolds definito in base al valore medio della
UD
. Si ricorda che la velocità media
velocità sulla sezione U e al diametro della condotta D: Re =
ν
sulla sezione è definita dalla:
63
U=
1
udA
A ∫A
(54)
essendo u la velocità media locale.
Allo scopo di descrivere matematicamente il moto si possono considerare le equazioni (36):
∂U
=0
∂
x
1 ∂ ∂U 1 ∂ r u' v'
∂ζ
+ν
=0
r
−
− g
∂x
r dr ∂r r ∂r
2
2
2
− g ∂ζ − ∂ (v' ) + (v' ) − (w' ) = 0
r
∂r
∂r
(
)
(55)
in cui siano state considerate le semplificazioni introdotte sopra e sia stata considerata la quota
p
, essendo z la quota riferita ad un piano di riferimento
piezometrica ζ , definita come: ζ = z +
ρg
orizzontale (figura 13), al posto della pressione. La prima equazione conferma il fatto che la
componente secondo x della velocità media è funzione solo della coordinata r; dalla terza si può
ottenere la distribuzione della piezometrica secondo la coordinata radiale:
ζ =ζw +
(v' )2
g
r
+∫
r
R
(v' )2 − (w' )2 dr
(56)
gr
in cui ζ w è il valore assunto dalla piezometrica sulla parete della condotta. Le componenti della
velocità di agitazione influenzano il valore della piezometrica all’interno della condotta. Tuttavia,
sostituendo l’espressione della piezometrica (56) nella seconda delle equazioni (55) e tenendo conto
dell’ipotesi di omogeneità rispetto ad x delle statistiche della velocità si ottiene che solo la
piezometrica alla parete entra in gioco nella seconda delle equazioni (55):
ρgJ = −
1 d (rτ )
r dr
(57)
l’equazione (57) esprime il fatto che la diminuzione di piezometrica o cadente piezometrica J:
∂ζ
( J = − w ) è bilanciata dalla variazione rispetto al raggio dello sforzo tangenziale totale
∂x
dU
− u' v' . Il simbolo di derivata totale viene adottato in quanto, per l’uniformità del
τ = ρ ν
dr
fenomeno, U dipende solo dalla coordinata radiale. Il verso del moto è concorde con il verso delle x
crescenti e coincide con la direzione in cui la quota piezometrica diminuisce. L’equazione (57) può
essere integrata rispetto ad r, imponendo come condizione al contorno il fatto che lo sforzo sull’asse
è nullo, a causa della simmetria del moto. Si ottiene:
ρgJ
dU
− u' v' = −
r
2
dr
τ = ρ ν
(58)
64
L’equazione differenziale (58) non può essere risolta nell’incognita U a causa della presenza dello
sforzo di Reynolds. Allo scopo di determinare il profilo di U occorre pertanto utilizzare un modello
di turbolenza o l’analisi dimensionale accoppiata alle misure sperimentali: seguiamo dapprima la
seconda via, per poi verificare, grazie a questa, il modello di turbolenza.
Lo sforzo totale varia linearmente con il raggio, si annulla sull’asse ed è massimo (in modulo) per
r=R, ossia sulla parete della condotta, ove coincide con la sola parte viscosa, annullandosi in parete
lo sforzo di Reynolds:
τ w = ρν
dU
dr
= − ρgJ
r=R
R
2
(59)
Il segno dello sforzo è negativo in quanto lo sforzo si oppone al moto. Facendo riferimento alla
parete, è lo sforzo che la parete esercita sullo strato di fluido che ad essa aderisce. All’interno della
condotta, entrambi i contributi dello sforzo (viscoso e di Reynolds) partecipano alla formazione
dello sforzo totale. Nella figura 14 si può vedere il tipico andamento dello sforzo totale, ripartito
nelle sue componenti, in corrispondenza di due differenti valori del numero di Reynolds: Re=5600 e
Re=13750. Lo sforzo di Reynolds è dato dal valore della curva a tratteggio per Re=5600 e dal
valore della curva a tratto continuo per Re=13750.
Figura 14. Andamento dello sforzo totale in condotta in funzione del raggio. Re=5600 (curva a tratteggio), Re=13750
(curva a tratto continuo)
Lo sforzo viscoso è dato nei due casi dal segmento esistente tra la curva corrispondente e la
semiretta passante per i punti (0,0), (1,1).
Si nota come, contrariamente a quanto accade nel getto assialsimmetrico, in cui lo sforzo viscoso è
ovunque trascurabile, nel flusso in condotta la componente viscosa è importante in prossimità della
parete e per una estensione spaziale molto piccola a partire da questa. L’entità di tale estensione
spaziale inoltre si riduce al crescere del Reynolds: in altre parole la zona in cui lo sforzo viscoso
predomina o è paragonabile allo sforzo di Reynolds decresce al crescere di Reynolds, appiattendosi
sulla parete. Consideriamo la formula (58) unitamente alla definizione di sforzo di parete (59) e
poniamo y=R-r, dimodochè per y=0 si è sulla parete e per y=R sull’asse della condotta. La formula
dello sforzo totale (58) può essere espressa nel modo seguente:
dU
y
y
− u' v' = τ w 1 − = − ρu*2 1 −
R
R
dy
τ = − ρ ν
65
(60)
R
= τ w . u* è la velocità d’attrito, definita nella zona in cui lo sforzo
2
viscoso è importante rispetto allo sforzo turbolento, detta regione viscosa di parete (viscous wall
region). La velocità d’attrito quantifica l’ordine di grandezza della scala di velocità nella regione
viscosa di parete.
L’ordine di grandezza delle scale spaziali nella regione viscosa di parete è stimato dalla cosiddetta
lunghezza viscosa:
Avendo posto: ρu*2 = ρgJ
δ=
ν
(61)
u*
Si osservi che il rapporto della lunghezza viscosa al raggio della condotta:
δ
R
=
ν
u* R
=
1
ReT
(62)
è inversamente proporzionale al numero di Reynolds turbolento. Si vede bene quindi come
all’aumentare del Reynolds turbolento, che aumenta con l’aumentare del Reynolds, diminuisca
l’entità della regione viscosa di parete. E’ utile definire la coordinata adimensionale:
y+ =
y
δ
=
yu*
(63)
ν
che misura la distanza dalla parete in lunghezze viscose o unità di parete. La coordinata y + è
praticamente un numero di Reynolds turbolento locale, utile per distinguere le varie regioni di moto
al variare della distanza dalla parete. A tal riguardo si definisce regione di parete o regione interna
(inner region) la regione in cui la viscosità esercita la sua influenza sul moto. Essa si estende per
valori di y tali che: y/R<0.1, ossia per valori di y + tali che: 0 < y + < 0.1 ReT . In particolare per
0 < y + < 5 lo sforzo viscoso predomina decisamente su quello di Reynolds e si ha il cosiddetto
sottostrato viscoso (viscous sublayer), per 5 < y + < 30 si ha una zona intermedia (buffer layer), in
cui lo sforzo viscoso e quello di Reynolds sono dello stesso ordine di grandezza, e per
50 < y + < 0.1 ReT lo sforzo viscoso diviene gradualmente trascurabile rispetto a quello di Reynolds.
In tutta la regione interna si può ammettere che la derivata della velocità media U rispetto ad y
dipenda dalla viscosità, dalla velocità di attrito e dalla posizione. Si può porre cioè che:
y d (U u* )
dU
= f ( y ,ν ,u* ) ⇒ +
= f ( y + ), 50 < y + < 0.1 ReT
dy
dy +
(64)
D’altra parte, si può definire una regione esterna (outer region), descritta dalla variabile
y
50
e individuata dalla condizione
< η < 0.3 , in cui si può supporre che
dimensionale η =
ReT
R
l’influenza della viscosità sia del tutto trascurabile e che pertanto la derivata della velocità U
rispetto ad y dipenda dalla velocità di attrito, dalla distanza dalla parete y e dalla dimensione
geometrica della condotta. Si ha pertanto nella regione esterna:
66
ηd (U u* )
dU
= g ( y ,u* , R ) ⇒
= g (η ),
dy
dη
50
< η < 0.3
ReT
(65)
50
⇒ ReT > 22.4 , fatto ampiamente verificato nelle
ReT
correnti in pressione, l’estremo inferiore della regione interna è maggiore dell’estremo inferiore
della regione esterna: ossia esiste una regione di sovrapposizione (overlap region), comune alle
regioni interna ed esterna. In tale zona, le formule (64) e (65) devono valere contemporaneamente,
la qual cosa si verifica se le funzioni f ( y + ), g (η ) sono costanti:
Se si verifica la condizione 0.1 ReT >
y + d (U u* ) ηd (U u* ) 1
=
=
dy +
dη
κ
(66)
La doppia eguaglianza (66) fornisce due equazioni differenziali per la determinazione del profilo di
velocità nelle due zone. Integrando tali equazioni si ottengono le soluzioni generali:
U 1
u = κ log ( y+ ) + A
*
U = 1 log (η ) + B
u* κ
(67)
I profili di velocità (67) costituiscono la legge logaritmica di parete. La costante κ (detta di Von
Karman in onore dello scienziato che tra i primi si dedicò allo studio della turbolenza di parete)
deve essere determinata sperimentalmente: l’esperienza ha ormai mostrato che il valore κ=0.4, può
essere universalmente accettata nel caso delle condotte in pressione. Le costanti A,B si dovrebbero
determinare imponendo opportune condizioni al contorno. Per quanto riguarda la costante A si
dovrebbe imporre il fatto che per un certo valore della coordinata y + ( y + > 50 ) la velocità U è pari
ad un valore noto; in realtà si preferisce determinare tale costante sperimentalmente, unitamente alla
costante di Von Karman, interpolando i profili di velocità sperimentali con la prima delle
espressioni (67). Il valore universalmente accettato per A è dato da A=5. Per quanto riguarda la
costante B si può effettivamente imporre la condizione consistente nel fatto che sull’asse della
condotta (η=1), la velocità assume il valore massimo U 0 . Di conseguenza si ha:
U0 −U
1
= − log (η )
u*
κ
(68)
50
< η < 0.3 , è anche detta legge del difetto di velocità, in quanto esprime la
ReT
differenza tra la velocità massima U 0 e la velocità locale U. Per estendere il campo di validità della
legge del difetto di velocità per 0.3<η<1, si è soliti aggiungere una funzione Π(η), detta anche
funzione di scia, dipendente dal flusso esaminato, che permetta di interpolare il difetto di velocità
sperimentale nel campo dei valori di η: 0.3<η<1. Di conseguenza la (68) viene spesso presentata
nella forma:
La (68), valida per
U0 −U
1
= Π (η ) − log (η )
u*
κ
(69)
67
Infine, una semplice considerazione sulla equazione (60) permette di ottenere il profilo di velocità
nel sottostrato viscoso. Quest’ultimo infatti si estende per una distanza dalla parete piccolissima
rispetto al raggio, tanto che si può assumere: y/R≈0. Di conseguenza dalla (60), trascurando lo
sforzo di Reynolds rispetto a quello viscoso, si ottiene il seguente profilo di velocità, valido nel
sottostrato viscoso:
dU u*2
U
=
⇒
= y+ , 0 < y+ < 5
dy
u*
ν
(70)
Nel diagramma logaritmico mostrato in figura 15 viene illustrato l’andamento del profilo di velocità
dato dalla legge logaritmica di parete e del sottostrato viscoso. Si nota come la legge logaritmica
(prima formula (67)) risulti valida a partire da y + > 30 . Nel diagramma si indica tale zona come
sottostrato inerziale (inertial sublayer). Nella zona intermedia 5 < y + < 30 (buffer layer) i dati
sperimentali discordano da entrambe le leggi, il cui prolungamento si mostra inadatto a
rappresentarli. Per motivi pratici tuttavia si può assumere che le due leggi si raccordino in
corrispondenza ad un valore di y+ pari a: y+ ≈ 11 dato dalla soluzione della equazione:
y+ = 2.5 log ( y+ ) + 5
(71)
ossia dato dall’imporre che la legge del sottostrato viscoso e la legge logaritmica si eguaglino.
Figura 15. Profili sperimentali e analitici di velocità nelle condotte in pressione
E’ utile considerare, sia pur qualitativamente, il flusso di energia tra le diverse zone del moto e
l’andamento degli sforzi di Reynolds. A tale scopo è sufficiente distinguere il flusso in regione
68
viscosa interna ( y + < 50 ), regione della legge logaritmica ( y + > 50 ,η < 0.3 ) e regione del nucleo
y
(core region, > 0.3 ). La regione interna è una zona in cui l’attività turbolenta è molto vigorosa:
R
tanto la produzione e la dissipazione di energia cinetica turbolenta media raggiungono i loro picchi
per y + < 20 . In tale zona inoltre il moto è fortemente anisotropo.
Il rapporto della produzione di energia cinetica turbolenta media alla dissipazione raggiunge il
valore massimo di 1.8 per y + ≈ 11 , ossia all’interno della zona intermedia (buffer layer) della
regione interna: l’eccesso di energia prodotta viene trasferito per convezione turbolenta sia verso la
parete della condotta che verso la regione della legge logaritmica. All’interno di quest’ultima gli
sforzi di Reynolds normalizzati all’energia cinetica turbolenta media tendono a valori costanti:
(u' )2
(v' )2
(w' )2
u' v'
≈ 0.28 , mentre il rapporto della produzione alla dissipazione
K
K
K
K
tende ad un valore quasi unitario. Infine nella regione del nucleo lo sforzo di Reynolds tangenziale
u' v' , la produzione e la dissipazione di energia cinetica turbolenta media tendono a zero. Questo
fatto si giustifica osservando che la regione del nucleo è la regione dove avvengono i moti a grande
scala, lenti rispetto a quelli della regione interna e le cui scale spaziali sono paragonabili alla
geometria della condotta. Tali moti contribuiscono molto poco alla formazione degli sforzi di
Reynolds, alla produzione e alla dissipazione. In tal senso vengono anche detti moti inattivi. Va
infine accennato al ruolo che scabrezze superficiali possono avere nella determinazione dei profili
di velocità. Come è noto tali scabrezze possono essere caratterizzate da una dimensione geometrica
es che rappresenta praticamente l’altezza media delle asperità che sporgono dalla parete della
condotta verso l’interno di questa: naturalmente l’effetto sul moto dipende dalle condizioni del
moto stesso. Senza addentrarsi troppo nell’argomento, si può dire che l’effetto della scabrezza viene
tenuto in conto facendo comparire nella dipendenza funzionale delle (64), (65) anche la grandezza
eu
es. Di conseguenza, si perviene alla definizione del parametro adimensionale: Ni = s * , detto
≈ 1.1,
≈ 0 .3 ,
≈ 0 .6 ,
ν
numero di Nikuradse, che rappresenta il rapporto tra l’altezza media della scabrezza e l’altezza del
sottostrato viscoso. Per numeri di Nikuradse molto elevati, l’effetto della scabrezza predomina sulla
viscosità e sia il profilo di velocità logaritmico che la legge del difetto di velocità, vengono a
dipendere dalla sola scabrezza di parete.
Interpolando i dati sperimentali con la prima formula della legge logaritmica di parete (67) per una
parete scabra con scabrezza pari ad es, risulta un valore per la costante A pari ad 8.5. Si ha di
conseguenza:
y
U
= 2.5 Log + 8.5
u*
es
(72)
valida per valori del numero di Nikuradse tali che:
u* es
ν
> 70 .
Vediamo infine come il modello della lunghezza di mescolamento permetta di ottenere un profilo di
velocità universale, che ben si accorda con i dati sperimentali e la legge logaritmica di parete. A tale
scopo, consideriamo l’equazione (60), unitamente alla definizione dello sforzo di Reynolds (16):
2
dU
dU
y
+ ν
− u*2 1 − = 0
l
dy
R
dy
2
(73)
dalla quale si ottiene la seguente equazione differenziale:
69
y
1 −
R
2
*
dU
u
=2
dy
ν
Che,
(74)
2
y
u
1 + 4 l * 1 − + 1
ν R
u+ =
ponendo
lu
Ru
U
, l + = * , ReT = * ,
ν
ν
u*
può
essere
posta
nella
seguente
forma
adimensionale:
du +
=2
dy +
1−
y+
ReT
(75)
y
1 + 4l 2+ 1 − + + 1
ReT
Naturalmente, e questo è il punto debole del modello della lunghezza di mescolamento, deve essere
assegnata la funzione l + . Per le condotte in pressione può essere assunta la seguente definizione:
y
− +
l + = κy + 1 − e Al
(76)
in cui Al è una costante empirica il cui valore più comune è pari a 26. Con la definizione (76).
L’equazione (75) può essere integrata, imponendo la condizione che, per y + = 5 , la velocità u + sia
pari alla velocità all’uscita del sottostrato viscoso ( u + = 5 ). Si ha in definitiva:
y+
u+ = 5 + 2 ∫
5
ξ
1 −
ReT
ξ
1 + 4l 2+ 1 −
ReT
dξ
+ 1
(77)
Si nota che, finchè la coordinata adimensionale y + ha ordine di grandezza molto minore del numero
di Reynolds turbolento ReT (fatto che si verifica nella regione della legge logaritmica) la formula
(76), può essere sostituita dalla più semplice:
y+
u+ = 5 + 2 ∫
5
dξ
(78)
1 + 4l 2+ + 1
In figura 16 viene mostrato il confronto tra il profilo di velocità (77) e i dati sperimentali.
70
Figura 16. Confronto del profilo di velocità (77) (tratto pieno) con dati sperimentali (puntini).
Si noti che il profilo di velocità (77), diagrammato sul piano semilogaritmico assieme al profilo del
sottostrato viscoso, non solo risulta valido nella zona della legge logaritmica (come ci si aspettava)
ma anche nella zona intermedia (buffer layer) e in parte della regione esterna. Le discrepanze tra i
valori sperimentali e analitici si notano nella parte estrema della regione esterna, dove come è noto,
il profilo logaritmico non è più valido e deve essere introdotta la funzione correttiva di scia.
Flusso nelle correnti a superficie libera
Si consideri una corrente a superficie libera, in moto uniforme, in alveo scabro, con coefficiente di
scabrezza es, rettangolare larghissimo e pendenza i. Siano x, y gli assi diretti rispettivamente
secondo la linea di massima pendenza e la perpendicolare a quest’ultima. Detta U la componente di
velocità media secondo x, si ha: U=U(y). Tenuto conto della uniformità del moto secondo la
direzione x, le equazioni di bilancio della quantità di moto, l’equazione di bilancio della energia
cinetica turbolenta media (19) e l’equazione di bilancio della dissipazione (21) assumono la forma:
d
dU
+ gi = 0
(ν + ν T )
dy
dy
d ν T d K
+ ℘- ε = 0
dy
dy
σ
K
2
d ν T dε + C ℘ε − C ε = 0
ε1
ε2
dy σ ε dy
K
K
(79)
in cui la definizione di viscosità turbolenta è data dalla formula (20). E’ stato visto che, nella
regione di validità della legge logaritmica, la funzione produzione℘ eguaglia la dissipazione: di
conseguenza la seconda equazione (73) si semplifica nella:
d ν T d K
dy σ K dy
=0
(80)
71
soddisfatta dalla soluzione costante K = k , valida nella regione della legge logaritmica. La terza
equazione (79) assume allora la forma:
C µ k 2 d 1 dε Cε 2 − Cε 1 2
=
ε
k
σ ε dy ε dy
(81)
L’equazione (81) è soddisfatta da soluzioni del tipo: ε =
ε0
; sostituendo tale soluzione nella
y
equazione (81), si determina il valore della costante ε 0 . Si ottiene:
ε0 =
Cµ k 3
(82)
σ ε (Cε 2 − Cε 1 )
Si può dimostrare che tra la costante di Von Karman κ e le costanti empiriche del modello a due
equazioni, sussiste la seguente relazione:
κ = Cµ1 4 (σ ε (Cε 2 − Cε 1 ))1 2
(83)
Dimodochè è possibile porre la (82) nella forma:
ε0 =
C µ3 4 k 3 2
(84)
κ
Avendo ora a disposizione le soluzioni della seconda e della terza equazione (79), è possibile
esprimere in forma chiusa la soluzione della prima. Integrando una prima volta quest’ultima si
ottiene:
C k2
ν + µ
ε0
dU
y
= − giy + c
dy
(85)
La costante di integrazione si determina imponendo che in corrispondenza ad una quota dal fondo
pari alla scabrezza, lo sforzo totale (a primo membro della (85)) vale:
Cµ k 2 dU
es
ρ ν +
dy
ε
0
= ρu*2
(86)
y = es
Pertanto, ricordando che ρgih = ρu*2 ,essendo h la profondità della corrente, coincidente con il
raggio idraulico della sezione rettangolare larghissima, si ha:
c = u*2 +
u*2
es
h
(87)
e, di conseguenza:
72
dU
= u*2
dy
1−
ν+
y − es
h
Cµ k 2
ε0
(88)
y
La (88) può essere finalmente integrata, imponendo la condizione che per y=es la velocità assuma il
valore dato dalla legge logaritmica per parete scabra (72): U = 8.5u* . Si ha pertanto:
y
U
= 8.5 + ∫ u*
u*
es
1−
ν+
η − es
h dη
Cµ k 2
ε0
(89)
η
I profili della energia cinetica turbolenta media, della dissipazione e della velocità dipendono
dunque, oltre che dal valore delle costanti empiriche del metodo a due equazioni, dalla costante k:
quest’ultima, nella regione della legge logaritmica, vale approssimativamente k ≈ (2.5 ÷ 4)u*2 . In
definitiva il modello a due equazioni permette di riottenere, con sufficiente approssimazione, i
risultati sperimentali ottenuti nella regione di validità della legge logaritmica (y/h<0.1). A titolo di
esempio in figura (17) sono riportati (per 0<y/h<0.2) il profilo di velocità logaritmico (72),
interpolato sulla base di dati sperimentali, e quello analitico (83). Il profilo logaritmico è riportato in
colore blu, quello analitico in rosso. Si nota come le discordanze tra il profilo analitico e quello
logaritmico divengano via via più evidenti alla estremità della regione di validità della legge
logaritmica.
Figura (17) Confronto tra il profilo analitico (83) (rosso) e la legge logaritmica (blu).
Analoghe discordanze valgono per gli andamenti della energia cinetica turbolenta media e per la
dissipazione, per y/h>0.1, ossia al limite della regione di validità della legge logaritmica.
Profilo di temperatura in prossimità di parete.
Si consideri un flusso turbolento, uniforme, in prossimità di una parete a temperatura assegnata TH,
diversa da quella del fluido. Sia x la coordinata individuata sulla parete e y la coordinata ad essa
perpendicolare. Lo scambio termico tra parete e fluido viene influenzato profondamente dalla
turbolenza. Il calore viene trasportato dai moti di agitazione, con il risultato che il processo di
73
scambio termico convettivo è molto vivace. All’interno del flusso tuttavia, analogamente a quanto
visto nel caso di moto all’interno di una condotta, si possono distinguere varie zone. In prossimità
della parete vi è una zona in cui lo scambio termico per conduzione prevale sullo scambio termico
convettivo operato dai moti di agitazione. Tale zona è analoga al sottostrato viscoso. A seguire vi è
una zona intermedia, in cui scambio termico conduttivo e convettivo hanno lo stesso ordine di
grandezza e successivamente vi è la zona dello scambio termico convettivo, in cui la conduzione
non ha più importanza, e lo scambio termico è affidato soprattutto al trasporto di calore da parte del
moto di agitazione. Consideriamo, nelle ipotesi di uniformità del moto, l’equazione di bilancio
dell’energia termica (5):
d K + Γθ
dy ρCv
dΘ
=0
dy
(90)
Γ
K
,α T = θ , l’equazione
ρC v
ρCv
(90) può essere risolta per determinare il profilo di temperatura, noto il coefficiente di diffusività
termica del fluido α e assegnato il coefficiente di diffusività termica turbolenta α T . Per quanto
riguarda quest’ultimo, è possibile, per analogia, avvalersi della nozione di lunghezza di
mescolamento. In altre parole si può porre:
in cui sia stata adottata l’ipotesi di diffusività turbolenta (4). Posto α =
α T ∝ u* l
(91)
A sua volta la lunghezza di mescolamento l è proporzionale alla dimensione dei moti di agitazione,
che diventano via via più piccoli all’approssimarsi della parete. Si può porre pertanto: l = κ T y ,
essendo κ T una costante e y la distanza dalla parete. Di conseguenza la (90) diviene, conglobando
le costanti di proporzionalità nell’unica costante κ T :
d
dΘ
=0
(α + κ T u* y )
dy
dy
(92)
e può essere integrata una prima volta. Il risultato esprime il fatto che il flusso termico totale q,
somma del flusso termico convettivo e conduttivo, è costante rispetto ad y:
α 1 + κ T
u* y dΘ
q
=−
α dy
ρCv
Per y tali che κ T
u* y
α
(93)
<< 1 , dalla (93) si ottiene il profilo di temperatura nella zona in cui predomina
lo scambio termico conduttivo:
Θ = TH −
u y
q u* y
= TH − T* *
ρC v u* α
α
(94)
q
. L’andamento della temperatura nella zona conduttiva è identico
ρCv u*
all’andamento della velocità nel sottostrato viscoso: dipende linearmente dalla coordinata
in cui è stato posto: T* =
74
adimensionale
u* y
α
quelli convettivi κ T
κT y
. Nella zona in cui gli scambi termici conduttivi sono trascurabili rispetto a
u* y
α
>> 1 e l’equazione (93) si modifica nella:
dΘ
= −T*
dy
(95)
da cui si ottiene il seguente profilo di temperatura:
Θ = TH −
u y
log * − AT
κT
α
T*
imponendo che per y =
rapporto
α
u*
(96)
la temperatura valga TH − AT , essendo AT una temperatura funzione del
ν
tra la viscosità cinematica e diffusività termica del fluido. I profili di temperatura (94) e
α
(95), validi rispettivamente nella zona conduttiva e convettiva, mostrano la profonda analogia tra le
distribuzioni di temperatura e di velocità in un flusso turbolento uniforme, in prossimità di una
parete piana. L’analogia è inoltre anche numerica, poiché la costante universale κ T vale 0.48, che è
un valore di poco differente al valore κ=0.4, assunto dalla costante di Von Karman κ per i profili di
velocità. La costante AT non è invece una costante universale ma dipende, come detto, dal rapporto
ν
, definito numero di Prandtl del fluido considerato.
α
75
Capitolo IV. Applicazioni del modello di turbolenza della mixing
length
Premessa
In questo capitolo verranno esposti ulteriori esempi di applicazioni di modelli di turbolenza basati
sul concetto di eddy viscosity a flussi di notevole interesse. Verranno esaminati, in particolar modo,
due esempi di flussi liberi stazionari: il flusso di scia a valle di un ostacolo (far wake) e lo strato di
mescolamento tra due correnti con velocità differenti (mixing layer). Verrà inoltre illustrata
l’applicazione del modello della mixing length allo strato limite turbolento.
Ciò che accomuna gli esempi riportati in questo capitolo consiste nella possibilità di esprimere le
soluzioni delle equazioni in forma autosimile, tale cioè che la dipendenza funzionale dalle variabili
spaziali avvenga per raggruppamenti adimensionali di queste ultime. La forma autosimile favorisce
la ricerca di soluzioni analitiche, come è stato visto nel capitolo precedente in relazione al caso del
getto assialsimmetrico, o semplifica sensibilmente la forma delle equazioni, facilitandone la
soluzione numerica.
Flusso di scia a valle di un ostacolo
Si consideri (figura 1) l’ostacolo cilindrico investito dalla corrente indisturbata avente direzione
parallela e verso concorde all’asse delle x, velocità di modulo pari a U ∞ .
y
L
U∞
near
wake
far
wake
2δ
x
Figura 1. Lo schema della scia a valle di un ostacolo
La corrente investe l’ostacolo e genera una perturbazione o scia nel campo di velocità indisturbata
che si può distinguere in scia vicina (near wake), in cui la perturbazione sul campo di velocità ha
ordine di grandezza paragonabile a quello della velocità indisturbata, e in scia lontana (far wake) in
cui la perturbazione sul campo di velocità ha ordine di grandezza trascurabile a quello della velocità
indisturbata. La zona di scia vicina è caratterizzata da un campo di moto estremamente irregolare,
mentre quella di scia lontana presenta una maggiore regolarità di moto, il cui campo può essere
utilmente studiato facendo ricorso ad opportune ipotesi semplificative. A tal proposito si assumano
valide le classiche semplificazioni di strato limite alle equazioni di conservazione della massa e di
bilancio della quantità di moto:
76
∂U ∂V
∂x + ∂y = 0
U ∂U + V ∂U = ∂ ν ∂U − u' v'
∂x
∂y ∂y ∂y
(1)
Secondo tali semplificazioni la pressione può variare solo con la coordinata x In questo caso però
essendo il campo di moto esterno uniforme, la pressione risulta costante anche rispetto alla x e le
componenti del gradiente scompaiono dalle equazioni.
In base alla definizione di scia lontana, si assuma ora, per il campo medio di velocità:
U ( x , y ) = U ∞ − u ( x , y )
V ( x , y ) = v( x , y )
(2)
distinto in campo indisturbato e perturbazione. La perturbazione sulla componente di velocità
indisturbata secondo x si sottrae, in quanto l’effetto dell’ostacolo consiste nel generare una zona di
calma (la scia appunto), che si estingue gradualmente a valle dell’ostacolo, per l’azione di
trascinamento che la corrente esterna indisturbata esercita sulla scia. La perturbazione sul campo di
velocità indisturbato tende ad annullarsi all’aumentare della distanza x dall’ostacolo e naturalmente
all’aumentare della y.
Sostituendo le (2) nelle equazioni (1), si ottengono le seguenti equazioni:
∂u ∂v
∂x + ∂y = 0
U ∂u + u ∂u + v ∂u = ∂ ν ∂u − u' v'
∞ ∂x ∂x
∂y ∂y ∂y
(3)
i termini posti tra parentesi tonde si possono trascurare, in quanto contengono termini quadratici
nelle perturbazioni u,v. In tal modo dalla seconda delle (3) si ottiene l’equazione linearizzata di
bilancio della quantità di moto:
U∞
∂u ∂ ∂u
− u' v'
= ν
∂x ∂y ∂y
(4)
in cui si può specificare lo sforzo di Reynolds secondo l’ipotesi della lunghezza di mescolamento:
− u' v' = l 2
∂u ∂u
∂y ∂y
(5)
e in cui la ℓ viene assegnata proporzionale alla semiampiezza della zona di scia lontana δ ( x ) :
l = aδ ( x )
(6)
essendo a una costante di proporzionalità. Tramite l’operazione di linearizzazione l’equazione di
bilancio della quantità di moto si disaccoppia dalla equazione di conservazione della massa e può
essere risolta indipendentemente. A tale scopo si può assumere che:
u = u0 ( x )F (η )
(7)
77
y
e u0 ( x ) un opportuno valore della
δ (x )
perturbazione, tale che u 0 ( x )F (0 ) rappresenti il valore della perturbazione sull’asse x. La funzione
F è il profilo autosimile di velocità. In conseguenza alla definizione (7) e alla definizione della
variabile di similitudine, l’equazione (4) si trasforma nella:
essendo η la variabile di similitudine, definita dalla: η =
Fδ du0 δ ' dF d 2 dF dF
a
=
U ∞ 2
− η
u0 dx u0 dη dη dη dη
(8)
essendo stata trascurata la viscosità cinematica ν rispetto a quella turbolenta. Le condizioni al
contorno da imporre sulla F devono rispecchiare il fatto che la perturbazione di velocità assume il
valore massimo per y=0, mentre si annulla per y→∞.
F' (0) = 0
lim F (η ) = 0
η →∞
(9)
Affinché la soluzione della (8) sia effettivamente autosimile, i coefficienti delle derivate della F
nella equazione (8) non devono dipendere dalla x:
U ∞
U
∞
δu' 0
u02
δ'
= a1
(10)
= a2
u0
E’ utile aggiungere a queste condizioni il vincolo integrale costituito dal fatto che, applicando
l’equazione globale del bilancio della quantità di moto al volume di controllo di ampiezza L
tratteggiato in figura, si deve avere:
ρU L −
2
∞
∫ (ρ (U
L2
−L 2
∞
)
− u ) + p' dy ≈
2
∞
L2
∫ ρuU
−L 2
∞
dy = 2 ρδu 0U ∞ ∫ F (η )dη = D
(11)
0
essendo L sufficientemente grande in modo da poter ritenere che per y=±L/2 la perturbazione di
velocità sia trascurabile, D la forza di trascinamento (drag) esercitata dal fluido sul corpo e
∞
p' ≈ − ρU ∞ u la perturbazione sulla pressione. Posto ∫ F (η )dη = 1 (si può infatti normalizzare
0
l’integrale conglobando il valore costante nella funzione δ) e combinando la (11) con le (10) si
ottengono le seguenti definizioni per le funzioni u0 ( x ),δ ( x ) :
u0 =
δ =
D
1
2 a 2 ρx
(12)
a2 D
x
ρU ∞2
78
e la relazione tra le due costanti: a1 = −a2 . Infine si deve notare che certamente la funzione F è
monotona decrescente e ha un massimo assoluto per η=0 e pertanto: F' (η ) = − F' (η ) . Ne consegue
che l’equazione (8) assume la forma:
2
dF d 2 dF
=0 ⇒
a
η+
− a2 F +
dη dη dη
2
d 2 dF
− a2 Fη = 0
a
dη dη
(13)
che si presta ad una prima integrazione:
2
dF
a
− a2 Fη = cos t
dη
2
(14)
La costante di integrazione si determina imponendo che per η=0, la derivata della funzione F si
deve annullare. Ne consegue cost=0. Risolvendo inoltre in funzione della derivata della F:
a
dF
= ± a2 Fη
dη
(15)
L’equazione che permette di determinare una soluzione fisicamente sensata si ottiene considerando
il segno – davanti al secondo membro della (15), tenendo conto del fatto che la velocità deve essere
monotona decrescente con η. Si ottiene, detta C una costante di integrazione:
η
F (η ) = C 2 1 −
ηe
32
2
(16)
3aC
y
in cuiη e è una coordinata fittizia, definita dalla: η e = e =
δ ( x ) a 2
23
. E’ possibile attribuire ad
η e il valore unitario: tale fatto equivale semplicemente a dire che in corrispondenza della
semiampiezza della scia la perturbazione di velocità si annulla: poiché inoltre quest’ultima
assumerebbe valori negativi all’esterno della scia, privi di significato, la validità della (16) si
considera solo all’interno della scia. In definitiva:
3aC
ηe =
a
2
23
= 1 ⇒ 3aC = a 2
(17)
Applicando inoltre il vincolo integrale sulla funzione (16):
η
2
(
)
F
η
d
η
=
C
∫0
∫0 1 − η e
1
1
32
2
2
dη = 9C = 1 ⇒ C =
20
20
= 1.49
9
(18)
L’andamento della funzione (16), attribuendo il valore calcolato con la (18) alla costante C, è
riportato in figura (2).
79
Figura 2. Andamento della funzione F(η)
In conseguenza al valore assunto dalla costante C, determinato dalla applicazione del vincolo
integrale, tra le costanti a ,a 2 sussiste la seguente relazione:
a=
a2
20
(19)
Dunque per utilizzare i risultati offerti dalla applicazione del modello della lunghezza di
mescolamento alla scia lontana a valle di un ostacolo, è necessario determinare sperimentalmente il
valore della costante a2 . In particolare si può misurare la forza di trascinamento esercitata dalla
corrente sul corpo e, facendo ricorso ad opportune tecniche di visualizzazione, interpolare il profilo
di scia con la legge:
δ = a2
D
x
ρU ∞2
(20)
Le misure di Schlichting (1979) hanno permesso di determinare il valore: a 2 = 0.648 e di
conseguenza: a1 = −0.648, a = 0.18 . In definitiva l’andamento della componente di velocità
orizzontale è dato dalla:
ρU ∞2
D
−
U = U ∞ − 1.38
.
y
1
1
24
ρx
Dx
32
2
(21)
mentre quello della componente verticale può essere ottenuto applicando l’equazione di continuità:
80
y
∂U
dy
∂x
0
V = −∫
(22)
Le misure sperimentali confermano pienamente l’andamento teorico predetto dalle formule sopra
riportate. In questo senso il modello della lunghezza di mescolamento funziona egregiamente allo
scopo di fornire formule di facile utilizzo per la predizione delle grandezze di interesse.
Strato di mescolamento
Si considerino (figura 3) due correnti parallele, con velocità indisturbata U 1 ,U 2 , che in x=0
vengano a contatto.
y
U1
0.4 δ
x
U2
δ
0.6 δ
Figura 3. Schema dello strato di mescolamento
A seguito del contatto delle due correnti, si genera un profilo di velocità in cui i valori delle velocità
indisturbate U 1 ,U 2 vengono recuperati al tendere della coordinata y all’infinito:
lim U = U 1 , lim U = U 2 . In realtà, in uno strato di ampiezza δ, asimmetrico rispetto all’asse delle x,
y →∞
y → −∞
le velocità dei due strati praticamente raggiungono i valori indisturbati U 1 ,U 2 .
La componente secondo x dell’equazione di bilancio della quantità di moto, che si può utilizzare per
inquadrare il comportamento dello strato di mescolamento, è la seconda delle (1). In questo caso
tuttavia non si può linearizzare il problema, ma è possibile introdurre la funzione di corrente ψ=
ψ(x,y), che permette di esprimere le componenti di velocità tramite le:
∂ψ
U = ∂y
V = − ∂ψ
∂x
(23)
Le definizioni (23) soddisfano automaticamente l’equazione di continuità.
Si adotti il modello di turbolenza (5), in cui la lunghezza di mescolamento sia definita dalla (6),
essendo δ lo spessore dello strato di mescolamento definito in figura 3. Tenendo conto del fatto che
la velocità è sempre crescente con la y, si ottiene:
81
∂ψ ∂ 2ψ ∂ψ ∂ 2ψ
∂ ∂ 2ψ
aδ 2
−
=
∂y ∂x∂y ∂x ∂y 2 ∂y
∂y
2
(24)
Le condizioni al contorno sulla funzione di corrente sono innanzitutto date dalle:
∂ψ
∂ψ
lim
= U 1 , lim
= U 2 . Una soluzione autosimile può essere posta nella forma:
y →∞ ∂y
y → −∞ ∂y
y
ψ = ψ 0 ( x )F (η ),η =
. Sostituendo la definizione di funzione di corrente nella (24), si vede che
δ (x )
l’esistenza delle soluzioni autosimili è possibile se:
dδ
dx = A
δ dψ
0
=C
ψ 0 dx
Essendo
A,C
(25)
due
costanti.
Le
(25)
sono
soddisfatte
dalle
seguenti
due
C
A
funzioni: δ = Ax ,ψ 0 = AU 1 x , grazie alle quali e alla definizione della variabile η la (24) diviene
una equazione differenziale ordinaria, avente per incognita la F:
2a 2 F' ' F' ' ' +CFF' ' +( A − C )F' 2 = 0
(26)
Per l’arbitrarietà delle costanti A,C si può porre: A=C, così che la(26) si trasforma nella equazione
differenziale lineare a coefficienti costanti:
F' ' ' +
A
F =0
2a 2
(27)
Tale equazione può essere integrata adottando le seguenti condizioni al contorno:
F' (0.4 ) = 1
U2
F' (− 0.6 ) =
U1
F (0 ) = 0
(28)
Le prime due sono condizioni “fisiche”. La terza è una condizione cinematica, dedotta dal fatto che
l’asse delle x è una linea di corrente, la cosiddetta linea di corrente divisoria, sulla quale la funzione
di corrente ψ deve essere costante. In figura 4 viene mostrato il diagramma della soluzione della
equazione (27) con le condizioni al contorno (28) nel caso in cui U 2 = 0 . I dati sperimentali
A
. I migliori risultati si
possono essere usati per calibrare il valore ottimale del rapporto
2a 2
ottengono con i valori: A=0.247, a=0.07.
82
Figura 4. Profilo autosimile nello strato di mescolamento
Strato limite turbolento su lastra piana scabra.
Come è noto, ad una certa distanza dal bordo d’attacco di una corrente uniforme su una piastra
piana scabra, lo strato limite subisce la transizione da laminare a turbolento. Tale transizione, a
seconda del livello di perturbazione del flusso in ingresso, avviene quando la distanza x dal bordo
U x
d’attacco è tale che il numero di Reynolds locale: Re x = ∞ , raggiunge un valore compreso tra
ν
2 10 ÷ 310 .
Le equazioni di strato limite turbolento su una lastra piana scabra (figura 5), investita da una
corrente uniforme avente valore della velocità indisturbata pari a U ∞ sono le (1). Lo sforzo
5
6
turbolento − u' v' può essere definito nell’ambito del modello della lunghezza di mescolamento:
∂U
∂U ∂U
− u' v' = l
= l 2
∂y ∂y
∂y
2
2
(29)
in cui la lunghezza di mescolamento l può essere definita in funzione della distanza dalla parete:
l = κy , essendo κ≈0.4 la costante di Von Karman. Nella (29) si tiene conto del fatto che la velocità
U è crescente per y crescenti. Si ha di conseguenza:
∂U ∂V
∂x + ∂y = 0
U ∂U + V ∂U = ∂ ν + l 2 ∂U ∂U
∂x
∂y ∂y
∂y ∂y
(30)
Le condizioni al contorno devono essere assegnate all’imbocco, sulla piastra e sul bordo dello strato
limite. Per quanto riguarda le condizioni di imbocco si ha semplicemente:
83
U (0 , y ) = U ∞
V (0 , y ) = 0
(31)
La condizione sul bordo dello strato limite δ deve essere imposta solo sulla componente di velocità
U, in quanto la V si calcola con l’equazione di continuità:
U ( x ,δ ) = U ∞
(32)
Infine devono essere assegnate le condizioni sulla piastra. Per quanto riguarda la componente di
velocità V si ha semplicemente:
V ( x ,0 ) = 0
(33)
Derivante dal fatto che la velocità in prossimità della piastra è tangente ad essa.
Per quanto riguarda la componente di velocità U, la condizione al contorno si può dedurre dalla
legge di parete, ossia dall’andamento tipico della velocità in prossimità della parete, dedotta da
misure sperimentali. Infatti, l’imporre la classica condizione di aderenza alla parete, annullando la
velocità, implicherebbe il fatto che le equazioni (30) dovrebbero essere in grado di descrivere
accuratamente tutta l’evoluzione del profilo di velocità a partire dal confine fisico con la parete.
Questo fatto è estremamente difficoltoso da realizzare, sia per l’estrema ripidità con cui cresce il
gradiente di velocità e sia perchè le equazioni del modello sono state ricavate per operare
nell’ambito delle grandi scale del moto. E’ pertanto preferibile assegnare il valore della velocità in
corrispondenza della quota y=es, ossia della scabrezza, derivandolo dalla legge logaritmica
y
(ampiamente confermata dai dati sperimentali): U = u* log + 8.5 .
es
Si ha pertanto, per y=es:
y
δ
x
Figura 5. Schema di riferimento per lo strato limite.
U ( x ,0 ) = 8.5u*
(34)
E’ conveniente affrontare le equazioni di strato limite turbolento con una procedura di calcolo
numerico. Per tale scopo si consideri la seguente adimensionalizzazione delle variabili:
84
x = Lξ
y = δη
U = U ∞ u
V = δ U ∞ u
L
(35)
in cui L e δ sono rappresentativi rispettivamente dell’ordine di grandezza delle dimensioni della
piastra e dello spessore di strato limite sulla piastra. In conseguenza delle posizioni (35), le
equazioni (30) divengono:
∂u ∂v
∂ξ + ∂η = 0
2
2
2
u ∂u + v ∂u = 1 L ∂ u + L ∂ ~l ∂u
∂ξ
∂η Re δ ∂η 2 δ ∂η ∂η
(36)
~
in cui l è la lunghezza di mescolamento adimensionalizzata:
~ l
l = = κη
(37)
δ
Poichè le forze viscose e di inerzia all’interno dello strato limite si devono bilanciare, il coefficiente
2
degli sforzi viscosi deve risultare unitario:
1 L
=1 ⇒
Re δ
δ
L
=
1
. Di conseguenza le (36)
Re
divengono:
∂u ∂v
∂ξ + ∂η = 0
2
2
u ∂u + v ∂u = ∂ u + Re ∂ ~l ∂u
∂ξ
∂η ∂η 2
∂η ∂η
(38)
Le equazioni (38) devono essere risolte con le relative condizioni al contorno adimensionalizzate:
u (0 ,η ) = 1, 0 ≤ η ≤ k
v(0 ,η ) = 0 , 0 ≤ η ≤ k
u*
, 0 ≤ξ ≤1
u (ξ ,0 ) = 8.5
U
∞
v(ξ ,0 ) = 0 , 0 ≤ ξ ≤ 1
u (ξ , hδ ) = 1, 0 ≤ ξ ≤ 1
(39)
In cui n rappresenta la misura, espressa come multiplo di δ , della distanza dalla piastra in
corrispondenza della quale il profilo di velocità si è sviluppato completamente.
Si adotta una procedura di calcolo numerico basata sulle differenze finite. Come è noto tale tecnica
consiste semplicemente nel sostituire le derivate con rapporti di incrementi finiti. Senza addentrarsi
nella descrizione della tecnica delle differenze finite e delle problematiche che essa comporta, è
85
tuttavia opportuno osservare preliminarmente che la seconda equazione (38) è di tipo parabolico e
la variabile x gioca il ruolo di variabile pseudo-temporale.
k
dξ
j+1
dη
j
j-1
ξ
0
i
i+1
1
Figura 6. Il reticolo computazionale
Ciò detto, approssimando con la formula in avanti la derivata rispetto a ξ e con le formule centrate
le derivate rispetto ad η , dalla seconda equazione (38) si ottiene la seguente formula esplicita per la
determinazione della velocità u ij+1
u
i +1
j
i
i
i
i
i
i
i
i
i
i
i
i
dξ i u j +1 − u j −1 u j +1 − 2u j + u j −1
~ ~ u j +1 − u j −1 ~ u j +1 − 2u j + u j −1 u j +1 − u j −1
= u + i − v j
+
+ 2 Re l j l' j +1
+ lj
2dη
u j
2dη
dη 2
2dη
dη 2
(40)
i
j
valida per j=1,…, N j − 1 , i=0,…, N i − 1 , essendo N i , N j il numero dei punti computazionali
individuati sugli assi ξ,η e dξ, dη gli intervalli su tali assi. Di tali intervalli si definisce il dη :
dη =
k
, mentre il dξ viene definito in base ad un criterio di stabilità, ossia in modo tale da rendere
Nj
stabile il calcolo rispetto agli errori di approssimazione commessi dal calcolatore elettronico, ossia
da evitarne la loro sovrapposizione distruttiva. Se infatti il dξ venisse definito arbitrariamente, il
calcolo numerico potrebbe divenire instabile; in tal caso la soluzione presenterebbe dei valori del
tutto privi di senso fisico. Una volta stabilito l’intervallo dη , il dξ che permette un calcolo
numerico stabile viene dedotto (con qualche approssimazione) dal rispetto delle seguenti
condizioni, determinate applicando l’analisi di Von Neumann alla formula (40) :
u ij
dξ < i dη
vj
u ij dη 2
dξ <
2
(41)
Le diseguaglianze (41), calcolato dη , devono essere soddisfatte nelle condizioni più sfavorevoli e
forniscono delle stime per il dξ: si noti, a tal proposito come in linea di massima la seconda fornisca
86
dei dξ proporzionali a dη 2 e dunque più piccoli della prima, secondo la quale il dξ è proporzionale
a dη.
Dalla struttura della (40) si comprende il perché la x possa essere considerata una variabile pseudo
temporale: il valore nella ascissa di indice i+1, viene determinato esclusivamente in funzione di ciò
che accade nell’ascissa precedente, in corrispondenza delle ordinate j-1, j, j+1. Perciò la formula
(40) permette di far “marciare” la soluzione sulla piastra a partire dal bordo d’attacco.
La componente v viene calcolata integrando la prima equazione (38):
η
∂u
dh
∂ξ
0
v(ξ ,η ) = − ∫
(41)
Approssimando la derivata con una formula in avanti e l’integrale con una sommatoria, si ottiene
dalla (41) la formula per il calcolo della componente v:
v
i +1
j
dη j −1 i +1 i
=−
∑ (uk − uk )
dξ k = 0
(41)
valida per valida per j=1,…, N j .
Le condizioni al contorno (39) assumono pertanto la forma:
u 0j = 1, 0 ≤ j ≤ N j
v 0j = 0, 0 ≤ j ≤ N j
u*
i
, 0 ≤ i ≤ Ni
u 0 = 8.5
U
∞
v i = 0, 0 ≤ i ≤ N
i
0
i
u N j = 1, 0 ≤ i ≤ N i
(42)
In definitiva l’algoritmo per la determinazione dei profili delle componenti di velocità u, v procede
nel modo seguente:
•
•
•
•
si assegnano le condizioni al contorno (42);
si applica la formula esplicita (40) e si determina il profilo della u nel i+1mo punto
computazionale;
si applica la formula (42) e si determina il profilo della v nel i+1mo punto computazionale;
si ripete il ciclo di operazioni, avendo preventivamente aggiornato i valori delle variabili e
rispettato il vincolo di stabilità (41);
Si noti infine come le equazioni (38) presentino una soluzione asintotica esatta, ottenuta al tendere
di x all’infinito e valida nella zona di pieno sviluppo della turbolenza. In tale zona si dovrà avere
∂u
l’uniformità della soluzione rispetto alla variabile spaziale x: v = 0 ,
= 0 ⇒ u = u (η ) . Di
∂ξ
conseguenza la seconda equazione (38) assume la forma:
d
dη
2
du
~ du
= 0
+ Re l
dη
dη
(43)
87
che può essere integrata una prima volta, con il seguente risultato:
2
du
~ du
+
Re l 2
− c1 = 0
dη
dη
(44)
Risolvendo l’equazione algebrica (44) rispetto alla derivata della velocità e scegliendo la radice
positiva, corrispondente ad un profilo di velocità crescente con la η, si ottiene l’equazione
differenziale:
~
1 + 4 Re l 2 c1 − 1
du
=
~
dη
2 Re l 2
(45)
u
e
Che può essere risolta imponendo la condizione: u s = 8.5 * :
U∞
δ
~
η
1 + 4 Re l 2 c1 − 1
u*
u (η ) = 8.5
+
dη
~
U ∞ es∫δ
2 Re l 2
(46)
La costante c1 può essere determinata imponendo che al bordo dello strato limite, per η = k , la
velocità deve assumere il valore che si ha nella corrente indisturbata:
~
k
1 + 4 Re l 2 c1 − 1
u*
dη
+
1 = 8.5
~
U ∞ es∫δ
2 Re l 2
(47)
La (47) è un’equazione trascendente in c1 , che deve essere risolta, caso per caso per tentativi.
Possibili miglioramenti del modello della lunghezza di mescolamento
Nei casi sinora esaminati la lunghezza di mescolamento viene assunta proporzionale allo spessore
di una caratteristica fisica del fenomeno in esame (ad esempio allo strato di mescolamento, allo
spessore della scia) o, come nei flussi di parete, alla distanza da quest’ultima. Tale assunzione è
tuttavia la più semplice possibile. Il modello della lunghezza di mescolamento può però essere
migliorato per renderlo più consistente con la realtà fisica dei flussi turbolenti.
Tra le possibili migliorie è opportuno ricordare almeno le seguenti tre, riguardanti il modello della
lunghezza di mescolamento per i flussi di parete.
La prima di esse, introdotta da Van Driest (1956), consiste nel moltiplicare il classico andamento
lineare della lunghezza di mescolamento per una funzione, detta di damping:
u y
− *
l = κy 1 − e νA0
14243
(48)
Funzione di damping
in cui A0 è una costante, che deve essere calibrata con i dati sperimentali. L’introduzione della
funzione di damping è giustificata dal fatto che le misure sperimentali degli sforzi turbolenti
88
tangenziali − u' v' in prossimità di una parete piana, hanno rivelato un andamento proporzionale ad
y4. Esprimendo lo sforzo tangenziale turbolento − u' v' in prossimità della parete tramite la:
∂U
− u' v' = l 2
∂y
y =0
2
(49)
e sostituendo in tale espressione la (48), si ottiene, per y molto piccoli:
∂U
− u' v' ≈
∂y
2
κ 2u 3 4
*
y + O y5
2
2
A0ν
y =0
( )
(50)
L’introduzione della funzione di damping ha permesso un sensibile miglioramento nel riprodurre i
dati sperimentali.
La seconda modifica, introdotta da Clauser (1956), si basa sul fatto che, al crescere della distanza
della parete, l’andamento della lunghezza di mescolamento (48) non risulta consistente con i dati
sperimentali. In particolare, facendo riferimento alla ripartizione in zone operata nel flusso
turbolento in condotta, nella zona esterna è preferibile adottare direttamente una definizione della
viscosità turbolenta piuttosto che della lunghezza di mescolamento. In particolare si può porre:
ν T = aU eδ
(51)
in cui δ è lo spessore di strato limite e U e è la velocità al bordo d’uscita. La seconda modifica al
modello della lunghezza di mescolamento è molto importante: basti pensare al fatto che nei flussi di
parete, il profilo logaritmico diminuisce di validità all’aumentare della distanza della parete e deve
essere migliorato con l’aggiunta di una legge di scia. La definizione (51) pertanto può essere
utilmente aggregata, nei flussi di parete, al modello della lunghezza di mescolamento (48) valido
nella zona interna di parete.
Infine la terza modifica, introdotta da Klebanoff (1956), tiene conto del fatto che al crescere della
distanza della parete il flusso può divenire intermittente, ossia può esibire, durante intervalli di
tempo di durata irregolare, comportamento laminare. Tener conto dell’intermittenza, nell’ambito di
una formulazione che fa uso del modello di lunghezza di mescolamento è possibile moltiplicando la
viscosità turbolenta (51) per la funzione di attenuazione della viscosità, che Klebanoff definì
sperimentalmente nel modo seguente:
f =
1
y
1 + 5.5
δ
(52)
6
In tal modo, al crescere di y si tiene conto dell’effetto di intermittenza - se opportuno - adottando un
valore di viscosità turbolenta minore di quello che competerebbe al moto puramente turbolento e
che verrebbe stimato dalla (51).
89
Capitolo V. Introduzione alla modellazione e alla simulazione
della turbolenza. Gli approcci del Reynolds stress model, della
LES e della DNS.
Il Reynolds stress model
I modelli di turbolenza sinora esaminati permettono di determinare l’evoluzione degli sforzi di
Reynolds in funzione del campo di moto medio, tramite l’approccio della viscosità turbolenta. Si
ricorderà che con tale approccio il tensore di Reynolds risulta costantemente allineato al tensore del
gradiente di velocità media, la qual cosa costituisce un limite intrinseco dei modelli sinora
esaminati. Allo scopo di superare questa limitazione, sono stati elaborati dei modelli che si basano
sulla formulazione di tante equazioni di evoluzione per quanti sono gli sforzi di Reynolds che si
intendono simulare. Dal punto di vista teorico infatti, è possibile ottenere l’equazione di evoluzione
del generico sforzo di Reynolds: a tal proposito si considerino le componenti ima e jma della
equazione di Navier-Stokes , nelle quali sia stata effettuata la decomposizione di Reynolds:
∂u i ∂u' i
∂u i
∂u i
∂u' i
∂u' i
∂ 2ui
∂ 2 u' i
1 ∂p 1 ∂p'
ν
ν
u
u
'
u
u
'
+
+
+
+
+
=
−
−
+
+
k
k
k
k
ρ ∂xi ρ ∂xi
∂t
∂x k
∂x k
∂x k
∂x k
∂x k ∂x k
∂x k ∂x k
∂t
2
2
∂u j + ∂u' j + u ∂u j + u' ∂u j + u ∂u' j + u' ∂u' j = − 1 ∂p − 1 ∂p' + ν ∂ u j + ν ∂ u' j
k
k
k
k
∂t
∂x k ∂x k
ρ ∂x j ρ ∂x j
∂x k ∂x k
∂x k
∂x k
∂x k
∂x k
∂t
(1)
Si è adottata la convenzione che gli indici ripetuti devono essere sommati. Si moltiplichi la prima
equazione per la velocità di agitazione u' j , la seconda per u' i e si applichi l’operatore di media:
∂u'i
∂ui
∂u'i
∂u'i
∂ 2u'i
∂p'
1
+
u
'
+
u
'
u
'
+
u
'
u
=
−
+
u
'
u
'
u
'
u
'
ν
j
j
k
j k
j
k
j
j
∂t
∂xk
∂xk
∂xk
∂xk ∂xk
ρ ∂xi
2
u' ∂u' j + u' u' ∂u j + u' u ∂u' j + u' u' ∂u' j = − 1 u' ∂p' + νu' ∂ u' j
i
k
i k
i
k
i
i
i ∂t
∂xk
∂xk
∂xk
∂xk ∂xk
ρ ∂x j
(2)
Tutti i termini contenenti linearmente le velocità di agitazione vengono eliminati dall’operazione di
media. Sommando infine le due equazioni e operando alcune trasformazioni si ottengono (per
i = x , y , z , j = x , y , z ) le equazioni di evoluzione degli sforzi di Reynolds:
∂u' i u' j
∂t
−
+ uk
∂u' i u' j u' k
∂x k
∂u' i u' j
∂x k
=
1 ∂ p' u' j ∂ p' u' i
−
+
∂x j
ρ ∂xi
∂ 2 u' i u' j
+ν
−
∂
x
∂
x
k
k
∂u j
∂u
− u' j u' k i − u' i u' k
+
∂x k
∂x k
+
∂u' ∂u' j
p' i +
ρ ∂x j ∂xi
1
∂u' j
− 2ν ∂u' i
∂x k ∂x k
90
(3)
Data la complessità delle equazioni, i vari termini sono stati scritti su diversi “piani”. Innanzitutto si
osservi che, nel tentativo di ottenere delle equazioni di evoluzione per gli sforzi di Reynolds,
compaiono termini di correlazione tra le grandezze fluttuanti di ordine più alto di quello
corrispondente agli sforzi di Reynolds o comunque incogniti (correlazioni pressione-velocità
fluttuante, pressione-gradiente della velocità fluttuante, gradiente della velocità fluttuante- gradiente
della velocità fluttuante). Tali termini sono il primo, il secondo, il sesto e il settimo a secondo
membro della (3). In altre parole, si pone un problema di chiusura, analogo a quello posto dalle
equazioni di Reynolds, ma ben più difficoltoso per la quantità e la qualità delle correlazioni
incognite da modellare. Vediamo ora il significato dei vari termini dell’equazione (3). A primo
membro compaiono il termine di variazione locale rispetto al tempo e convettivo degli sforzi di
Reynolds; possono essere indicati più sinteticamente dalla derivata totale della singola componente
del tensore di Reynolds:
Du' i u' j
Dt
=
∂u' i u' j
∂t
+ uk
∂u' i u' j
(4)
∂x k
eseguita seguendo il moto medio.
L’effetto del primo e secondo termine a secondo membro, consiste nella redistribuzione degli sforzi
di Reynolds all’interno del dominio del moto. Infatti, integrando tali termini sul dominio del moto V
e applicando il teorema della divergenza, si vede come il loro contributo sia sensibile solo attraverso
la frontiera S del dominio di integrazione:
∂u' i u' j u' k 1 ∂ p' u' j ∂ p' u'
i
∫V ∂xk + ρ ∂xi + ∂x j
dV = − u' u' u' n + 1 p' u' n + p' u' n
j i
i j
∫ i j k k ρ
V
(
)dS
(5)
Pertanto, se questi termini si annullano sulla frontiera, come in genere accade, nel complesso non
sono in grado di influenzare l’aumento o la diminuzione nel tempo degli sforzi di Reynolds
all’interno del dominio del moto, ma solo di determinarne la distribuzione nel suo interno. In
sostanza tali termini descrivono il trasporto turbolento degli sforzi di Reynolds all’interno del
dominio del moto.
Il terzo termine a secondo membro della (3) è un termine diffusivo vero e proprio, ossia che
determina la diffusione degli sforzi di Reynolds all’interno del dominio del moto, tramite il
meccanismo della diffusione molecolare. Questo termine, a differenza del precedente, influenza
l’evoluzione degli sforzi di Reynolds, in quanto non è detto che il suo integrale sul dominio del
moto:
ν∫
V
∂ 2 u' i u' j
∂x k ∂x k
dV = −ν ∫
S
∂u' i u' j
∂x k
nk dS
(6)
sia nullo, ossia non è detto che la derivata normale dello sforzo di Reynolds si annulli sulla
frontiera.
Il quarto e quinto termine a secondo membro della (3) sono termini somiglianti al termine
produzione che compare nella equazione della energia cinetica turbolenta media. La differenza
consiste nel fatto che il termine produzione è una grandezza scalare, mentre i corrispondenti termini
nella equazione (3) rappresentano le componenti cartesiane di un tensore al variare degli indici i,j.
La funzione produzione di energia cinetica turbolenta media si ottiene ponendo i=j e sommando
tutti i contributi ottenuti al variare degli indici, il cui significato fisico può essere visto come il
lavoro compiuto dagli sforzi di Reynolds per deformare il campo di velocità media.
91
Il sesto termine a secondo membro della (3) tende a ridurre l’entità degli sforzi di Reynolds
tangenziali ( i ≠ j ) e a ridistribuire l’energia tra quelli normali (i=j): ossia tende ad aumentare
l’isotropia della turbolenza.
Infine il settimo termine a secondo membro della (3) è l’analogo della funzione di dissipazione
della equazione di bilancio della energia cinetica turbolenta media: tuttavia la funzione di
dissipazione è uno scalare, mentre il settimo termine a secondo membro della (3) rappresenta le
componenti cartesiane di un tensore al variare degli indici i,j. Si vede facilmente però che ponendo
i=j e sommando tutti i contributi ottenuti al variare degli indici i, j, si ottiene la funzione di
∂u' ∂u' j
dissipazione viscosa. L’effetto del termine 2ν i
consiste chiaramente nella dissipazione degli
∂xk ∂xk
sforzi di Reynolds: dissipazione particolarmente efficace, come è noto, alle piccole scale.
Come affermato in precedenza, il primo, secondo, sesto e settimo termine a secondo membro della
(3) non possono essere determinati nell’ambito del Reynolds stress model: si rende pertanto
necessaria l’introduzione di relazioni di chiusura in grado di legare tali termini alle variabili risolte.
Partendo dal settimo termine a secondo membro della (3) si può porre:
2ν
∂u' i ∂u' j 2
= εδ ij
∂xk ∂xk
3
(7)
in cui δ ij ,ε sono rispettivamente il delta di Kronecker e la funzione di dissipazione. Con la (7) si
ipotizza che la dissipazione degli sforzi di taglio sia nulla e che sia uguale e proporzionale alla
funzione di dissipazione per i tre sforzi normali. L’ipotesi (7) è valida se i moti di piccola scala sono
isotropi, la qual cosa si verifica per numeri di Reynolds elevati. Il problema posto dalla (7) consiste
nel fatto che si dovrà introdurre necessariamente un’equazione per l’evoluzione della funzione di
dissipazione viscosa ε.
Il sesto termine a secondo membro della (3) contiene le interazioni tra velocità e pressione
fluttuanti. tale termine, spesso definito di ridistribuzione pressione-deformazione, è stato oggetto di
notevole attenzione nell’ambito modellistico, sia perché assume ordini di grandezza paragonabili a
quelli della produzione, sia perché coinvolge quantità di difficile misurazione.
Si può dimostrare che la pressione fluttuante è determinata sostanzialmente da due contributi:
dunque è possibile decomporre il sesto termine a secondo membro della (3) nella somma di due
quantità:
∂u' ∂u' j
p' i +
ρ ∂x j ∂xi
1
= Π 1ij + Π ij2
(8)
il primo legato ad interazioni tra termini contenenti esclusivamente le velocità fluttuanti, il secondo
ad interazioni tra termini contenenti la velocità fluttuante e la velocità media. Il primo contributo
può essere posto nella forma:
Π 1ij = c1
ε 2
K δ ij − u' i u' j
K 3
(9)
si vede chiaramente che questo contributo tende a diminuire l’entità degli sforzi di Reynolds
tangenziali ( i ≠ j ) e a ridistribuire l’energia tra quelli normali. Per quanto riguarda il termine Π ij2 si
può porre:
92
∂u j 2
∂u
∂u
∂u
∂u
∂u
∂u
2
Π ij2 = −α u' j u' k i + u' i u' k
− δ ij u' m u' n m − β u' i u' k k + u' j u' k k − δ ij u' m u' n n − γ K i
∂xk
∂xk 3
∂xn
∂x j
∂xi 3
∂x j
∂xm
(10)
Espressione proporzionale alla anisotropia degli sforzi di Reynolds: ossia tanto più gli sforzi di
Reynolds sono anisotropi, tanto più il termine Π ij2 diviene negativo: si tiene così conto della
anisotropia residua nelle piccole scale. Il primo e secondo termine a secondo membro della (3) sono
difficili (se non praticamente impossibili) da misurare in maniera accurata; essi rappresentano il
flusso degli sforzi di Reynolds e la loro modellazione si basa sull’ipotesi di assumerli proporzionali
p' u' j
p' u' i
al gradiente degli sforzi di Reynolds. In altre parole, posto: Cijk = u' i u' j u' k +
, si ha:
δ ik +
ρ
∂Cijk
∂xk
=
∂u' i u' j u' k
∂xk
+
1 ∂ p' u' j ∂ p' u' i
+
ρ ∂xi
∂x j
∂
=
∂xk
∂u' i u' j
∂u' k u' j
∂u' i u' k
Akm
+ Aim
+ A jm
∂xm
∂xm
∂xm
ρ
(11)
In cui Ai1i2 rappresenta le componenti cartesiane del tensore di viscosità turbolenta, che possono
essere definite tramite la: Ai1i2 = c s
K
ε
u' i1 u' i2 .
In definitiva, le relazioni di chiusura (7), (8), (9), (10), (11) permettono di esprimere i termini
incogniti in funzione degli sforzi di Reynolds, della energia cinetica turbolenta media e della
funzione di dissipazione. L’energia cinetica turbolenta media è a sua volta esprimibile esattamente
in funzione degli sforzi di Reynolds normali, mentre per quanto riguarda la funzione di dissipazione
si usa l’equazione di bilancio considerata nel modello a due equazioni (equazione (21), capitolo III).
L’unica differenza consiste nel termine diffusivo, che viene espresso diversamente, in modo da
tener conto della anisotropia degli sforzi di Reynolds:
℘ε
ε2
∂ε
∂ K
∂ε
+ Cε 1
u' k u' m
−
C
+ u ⋅ ∇ε = cε
ε2
∂t
∂x k ε
∂x m
K
K
(12)
I valori delle costanti c1 ,α , β ,γ , cs , cε , Cε 1 , Cε 2 vengono assegnati in funzione del problema
esaminato. I ragionamenti seguiti nel Reynolds stress model possono essere estesi per determinare
le equazioni di evoluzione dei termini θ ' u' ,C' u' , che compaiono nelle equazioni di evoluzione
della sostanza contaminante e della temperatura (equazioni (39) e (49) del I capitolo). Tali
equazioni dovranno ovviamente essere corredate delle necessarie relazioni di chiusura.
Due importanti problemi che si incontrano nell’applicazione del Reynolds stress model (ma anche
nei modelli ad una e due equazioni) consistono rispettivamente nel tener conto della presenza di
pareti e nella assegnazione di opportune condizioni al contorno. Per quanto riguarda il primo
problema, le equazioni di evoluzione della energia cinetica turbolenta media, della dissipazione,
degli sforzi di Reynolds e dei termini θ ' u' ,C' u' , si basano su ipotesi spesso valide in assenza o
lontananza di pareti. Se invece ci si trova in prossimità di pareti, è possibile che le equazioni del
modello siano inadeguate a descrivere il moto. A titolo di esempio si consideri il fatto che le
componenti cartesiane del tensore della viscosità turbolenta, date dall’espressione:
K
u y
Ai1i2 = c s u' i1 u' i2 , vengono sovrastimate nella regione: * < 100 : in cui, di conseguenza, può
ν
ε
essere opportuno modificare l’espressione di tali componenti tramite una opportuna funzione del
93
numero di Reynolds turbolento ReT =
Adottando la definizione: f µ = e
−
K
2
εν
detta funzione “smorzante” o di attenuazione f µ .
1
κ (1+ 0.02 ReT )
e assumendo per le componenti cartesiane del tensore
della viscosità turbolenta l’espressione: Ai1i2 = f µ c s
K
ε
u' i1 u' i2 , per ReT che tende a zero, dunque in
prossimità della parete, f µ tende a zero, così che tali componenti vengono ridotte.
Per ReT crescenti (allontanandosi dalla parete) f µ tende all’unità, in modo da riottenere la formula
standard delle componenti cartesiane del tensore della viscosità turbolenta, nell’ambito del
Reynolds stress model. L’effetto delle pareti influenza in generale il comportamento della
turbolenza: va in particolare sottolineata la marcata anisotropia degli sforzi di Reynolds che si
verifica in prossimità delle pareti e che rende l’ipotesi alla base della relazione di chiusura (7) del
tutto inconsistente.
Per quanto riguarda il secondo problema, i modelli a una e due equazioni e il Reynolds stress
model, sono caratterizzati da un elevato numero di equazioni differenziali alle derivate parziali
(possono arrivare a 11 nel Reynolds stress model con equazione di evoluzione della funzione di
dissipazione viscosa) che richiedono l’assegnazione di condizioni al contorno. A tal proposito si
possono distinguere due principali categorie di frontiere: quelle costituite da pareti fisse e le
frontiere libere. Sul primo tipo di frontiera, quello costituito da una parete fissa, si potrebbero in
teoria imporre condizioni al contorno nulle per le velocità e le grandezze da essa derivate, come gli
sforzi di Reynolds. La funzione di dissipazione è invece diversa da zero, e il suo valore deve essere
assegnato con attenzione. Tuttavia i calcoli numerici che si basano sui modelli finora esaminati non
u y
possono partire dalle pareti fisse, perché in prossimità di esse, per * < 30 , i gradienti della
ν
velocità assumono valori molto elevati e sarebbe pertanto necessario un numero di punti
computazionali molto grande per poter rappresentare efficacemente l’andamento delle grandezze in
gioco. Inoltre, data l’incertezza esistente sui valori da assegnare a determinate grandezze (come la
ε) in corrispondenza della parete, si preferisce assegnare le condizioni al contorno ad una distanza y
u y
dalla parete tale che: 30 < * < 100 . In corrispondenza, si può assegnare la velocità media
ν
tangente alla parete sfruttando la legge logaritmica:
1
yu
u = u* log * + 5
ν
κ
(13)
essendo y la distanza dalla parete, misurata in direzione normale ad essa, mentre la velocità media
normale alla parete è nulla. Nella stessa regione la funzione di dissipazione può essere determinata
in base alla stima:
du u*3
=
ε ≈ u' ⊗u' : D ≈ u
dy κy
2
*
(14)
mentre per la energia cinetica turbolenta media e gli sforzi di Reynolds si può, con buona
approssimazione, assumere dei valori proporzionali al quadrato della velocità d’attrito. I coefficienti
di proporzionalità vengono definiti in base ad evidenze sperimentali.
94
Le considerazioni fatte sinora valgono per pareti liscie. Per pareti scabre si possono assumere le
stesse relazioni, salvo la definizione della legge logaritmica, che dipenderà dal parametro di
scabrezza.
La complessità del Reynolds stress model pone seri problemi per la sua pratica applicazione. Una
utile semplificazione deriva dall’approssimare il primo membro della equazione (3) meno i primi
tre termini a secondo membro, con una espressione proporzionale al primo membro della equazione
dell’energia cinetica turbolenta media, meno il termine di trasporto turbolento. In altre parole:
∂u' i u' j
∂t
+ uk
∂u' i u' j
∂xk
+
∂u' i u' j u' k
∂xk
u' i u' j ∂K
∂K
∂
+ uk
−
∂xk ∂xk
K ∂t
1 ∂ p' u' j ∂ p' u' i
+
+
ρ ∂xi
∂x j
ν ∂K
T
σ K ∂xk
∂ 2 u' i u' j
−ν
≈
∂xk ∂xk
(15)
u' i u' j
=
(P − ε )
K
in cui P è la produzione di energia cinetica turbolenta media: P = −u'i u' j
∂ui
.
∂x j
In tal modo l’equazione (3) diviene:
u'i u' j
K
(P − ε ) = −u' j u'k ∂ui
∂u' ∂u' j
+ p' i +
ρ ∂x j ∂xi
1
∂xk
− u'i u' k
∂u j
∂xk
+
(16)
∂u' j
− 2ν ∂u'i
∂xk ∂xk
unitamente alle relazioni di chiusura (7), (8), (9) e (10). Le equazioni (3) degli sforzi di Reynolds
vengono così ridotte ad un sistema di equazioni algebriche, aventi per incognite gli sforzi di
Reynolds. Tali equazioni formano il cosiddetto Algebraic Stress Model, che determina gli sforzi di
Reynolds in funzione di K , ε e del gradiente della velocità media. Gli Algebraic Stress Model sono
particolarmente adatti a simulare quei flussi in cui le variazioni temporali degli sforzi turbolenti
siano molto graduali. Inoltre, essendo un compromesso tra il modello a due equazioni, basato
essenzialmente sull’ipotesi di isotropia, e il Reynolds Stress Model, uniscono la semplicità del
primo alla maggiore applicabilità del secondo.
I modelli di turbolenza finora considerati, al di là del crescente livello di complessità, hanno in
comune il fatto che l’equazione RANSE e l’equazione di continuità del moto medio devono essere
risolte per determinare i campi di velocità e pressione media. In tal senso è opportuno confrontare
tra loro i vari modelli per metterne in luce le varie caratteristiche. A tale scopo verranno prese in
considerazione le categorie illustrate all’inizio del capitolo III: livello di descrizione, completezza,
costo e facilità d’uso, campo di applicabilità, accuratezza.
1. Livello di descrizione
Il modello della lunghezza di mescolamento ed il modello ad una equazione richiedono che sia
specificata la lunghezza di mescolamento in funzione della posizione e permettono di
determinare, tramite l’ipotesi della viscosità turbolenta, gli sforzi di Reynolds. La scala spaziale
della turbolenza coincide con la lunghezza di mescolamento. Il modello a due equazioni
fornisce, sempre tramite l’ipotesi della viscosità turbolenta, gli sforzi di Reynolds; permette però
di determinare le scale della turbolenza in funzione di K , ε. In ogni caso i modelli della
lunghezza di mescolamento, ad una e due equazioni sono modelli basati sull’ipotesi della
viscosità turbolenta: di conseguenza gli sforzi di Reynolds sono praticamente proporzionali, sia
95
pur localmente, al gradiente della velocità media, il che costituisce una limitazione dei modelli
stessi. Nel Reynolds stress model e Algebraic stress model gli sforzi di Reynolds vengono
rappresentati direttamente e l’ipotesi di proporzionalità locale al gradiente della velocità media è
rimossa. Naturalmente L’algebraic stress model è una semplificazione del Reynolds stress
model che può essere di dubbia validità nei flussi rapidamente variabili.
2. Completezza
Il modello della lunghezza di mescolamento e il modello ad una equazione non sono completi
perché richiedono la definizione della lunghezza di mescolamento. Gli altri modelli finora
esaminati presentano un maggior grado di completezza, perché tutte le grandezze necessarie
vengono calcolate nell’ambito del modello stesso e non si rendono necessarie definizioni
“esterne”, salvo quelle dei coefficienti numerici e delle relazioni di chiusura.
3. Costo e facilità d’uso.
I modelli della lunghezza di mescolamento e ad una equazione sono i più semplici, ma anche i
meno usati allo stato attuale, per la povertà e la scarsa affidabilità delle informazioni che
possono dare nei casi di reale interesse tecnico.
Il modello a due equazioni è praticamente il modello più usato e incorporato in tutti i codici
commerciali: in effetti è il modello completo più semplice possibile. Ha un costo
computazionale ragionevole e fornisce risultati attendibili se usato congiuntamente ad opportune
assunzioni sul comportamento delle grandezze in prossimità delle pareti. In assenza di tali
assunzioni, la rappresentazione delle grandezze in prossimità delle pareti diventa estremamente
difficoltosa, a causa degli elevati valori assunti dai gradienti delle grandezze e dai termini
sorgente nelle equazioni. Di conseguenza la soluzione delle equazioni diviene problematica.
I modelli algebraic e Reynolds stress model sono molto più difficili e costosi da applicarsi: vi
sono infatti numerose equazioni differenziali alle derivate parziali o algebriche da risolvere. In
entrambi i casi il costo computazionale è molto maggiore che nel caso del modello a due
equazioni. In particolare, la soluzione numerica dei sistemi di equazioni algebriche non lineari,
pone seri problemi per la presenza delle radici multiple.
4. Campo di applicabilità
Il modello a due equazioni, il Reynolds e algebraic stress model possono essere applicati a
qualsiasi flusso turbolento, anche complesso (flussi con contaminanti, con trasporto di
temperatura, flussi multifase, etc.). In particolare il Reynolds e algebraic stress model possono
comprendere le equazioni per i termini di agitazione che compaiono nelle equazioni per il
trasporto della temperatura media e concentrazione media dell’inquinante.
5. Accuratezza
Il modello a due equazioni fornisce risultati accurati in flussi bidimensionali, con piccole
curvature nelle traiettorie e piccoli gradienti della pressione media. Per flussi tridimensionali,
con forti gradienti di pressione media e forte curvatura delle traiettorie, l’accuratezza del
modello a due equazioni diminuisce drasticamente.
Il Reynolds stress model può essere applicato con successo in calcolo di flussi con curvature
significative delle traiettorie e rapidamente variabili nel tempo. Il punto debole del modello a
due equazioni, del Reynolds e algebraic stress model è costituito dalla equazione evolutiva di ε,
la cui accuratezza può essere migliorata adottando differenti valori delle costanti, aggiungendo
termini correttivi, dipendenti dalla applicazione in esame o adottando ipotesi di chiusura più
complesse.
96
L’approccio della LES
Il punto di partenza sinora impiegato nella definizione dei modelli di turbolenza è costituito dalla
equazione RANSE e dalla equazione di continuità, in cui le grandezze incognite sono il vettore
velocità e la pressione media. Gli sforzi di Reynolds devono pertanto essere modellati attraverso
opportune relazioni di chiusura che fanno uso della viscosità turbolenta o determinati attraverso le
corrispondenti equazioni evolutive. Nell’approccio della large eddy simulation viceversa, si parte
dalla equazione di Navier Stokes e dalla equazione di continuità, le quali, attraverso una opportuna
operazione detta di “filtraggio” permettono di determinare i moti la cui scala spaziale è maggiore o
uguale ad un valore fissato. Tale valore segna il confine tra i moti direttamente simulati dalle
equazioni e i moti esclusi dalla simulazione, che pertanto devono essere modellati in qualche modo.
Large eddy simulation (LES) significa letteralmente: simulazione dei grandi vortici11, ossia i moti
di grande scala, o per lo meno di scala spaziale maggiore di un certo valore vengono simulati dalle
equazioni, i moti di piccola scala vengono modellati.
Vi sono quattro passi concettuali nell’approccio LES:
definizione dell’operazione di filtraggio e decomposizione dei campi di velocità e
I.
pressione in campo filtrato, ossia depurato dalle scale spaziali minori della scala spaziale
di soglia, e in campo residuo;
definizione delle equazioni di evoluzione dei campi filtrati, derivate dalla equazione di
II.
Navier-Stokes e di continuità.
III.
Definizione della relazione di chiusura per il tensore dello sforzo residuo o tensore di
sottogriglia, che appare nella equazione di Navier-Stokes in conseguenza
dell’operazione di decomposizione e filtraggio.
Determinazione dei campi di velocità e pressione filtrati attraverso la soluzione
IV.
numerica.
Definizione della operazione di filtraggio
L’operazione generale di filtraggio spaziale della funzione u (x , t ) è definita dalla:
u~ (x ,t ) = ∫ u (x − r ,t )G (r )dr
(17)
V
in cui u~ (x ,t ) è la grandezza filtrata, G la funzione filtro e V il dominio cui l’integrale è esteso.
L’operazione di filtraggio equivale ad una media pesata della funzione u (x , t ) sul dominio del moto,
con peso la funzione filtro. Quest’ultima è una funzione della distanza r dal punto generico x
considerato, che assume valori diversi da zero in un intorno di x e si annulla rapidamente al di fuori
di tale intorno. La forma più semplice per la funzione filtro è costituita dalla funzione “scatola”,
che, in una dimensione, è definita dall’espressione (figura 1):
∆
1
G = ∆ , x ≤ 2
(18)
G = 0, x > ∆
2
11
In realtà la parola inglese eddy non significa solo vortice, ma anche mulinello, ricciolo. Indica proprio il tipo di
movimento che si può vedere sulla superficie di un corso d’acqua a valle di un ostacolo, consistente in una serie di
mulinelli di varie dimensioni che si distaccano da esso alternandosi.
97
Figura 1. Tipici andamenti della funzione filtro.
Altri filtri, mostrati in figura 1, sono il gaussiano e il sinusoidale smorzato. La dimensione ∆ che
appare nella definizione (18) è legata alla scala di soglia, ossia alla scala spaziale minima che si
intende simulare. L’operazione di filtraggio (17) rimuove dalla funzione u (x , t ) tutte le scale
spaziali inferiori a ∆. Pertanto, tanto minore sarà ∆, tanto maggiore sarà il dettaglio con cui viene
descritta la funzione u (x , t ) dalla funzione filtrata. Al contrario, aumentando ∆, diminuirà il dettaglio
con cui viene descritta la funzione u (x , t ) dalla funzione filtrata. La dimensione ∆ può dipendere
dalla posizione x, se si vogliono ad esempio simulare scale minime di differente entità in posizioni
differenti del dominio del moto. Dalla definizione della funzione filtro dipende dunque il livello di
descrizione delle cosiddette scale spaziali risolte, ossia delle scale spaziali dei moti la cui
evoluzione viene descritta dalle equazioni del moto, opportunamente trattate.
L’operazione di filtraggio deve possedere alcune importanti caratteristiche:
a) conservazione delle costanti: la funzione costante filtrata, deve coincidere con la funzione
originaria: a~ = ∫ aG (r )dr = a ∫ G (r )dr = a . Da questa proprietà discende, posto a=1, che la
V
V
funzione filtro deve essere normalizzata ∫ G (r )dr = 1
V
b) Linearità: l’operazione di filtraggio è lineare:
∫ (au(x − r ,t ) + bv(x − r ,t ))G(r )dr = a ∫ u(x − r ,t )G(r )dr + b ∫ v(x − r ,t )G(r )dr = au~ (x,t ) + bv~(x,t )
V
V
V
c) Commutazione con l’operazione di derivazione: l’operazione di filtraggio commuta con
∂u~ (x ,t )
∂u (x − r ,t )
∂
l’operazione di derivazione: ∫
G (r )dr = ∫ u (x − r ,t )G (r )dr =
∂x
∂x V
∂x
V
La differenza tra la funzione originaria e la funzione filtrata definisce la funzione
residua: u (x , t ) − u~ (x , t ) = u' (x , t ) . Si deve osservare che applicando l’operazione di filtraggio alla
funzione residua non si ottiene in generale la funzione nulla:
∫ u' (x − r ,t )G(r )dr = ∫ u(x − r ,t )G(r )dr − ∫ u~ (x − r ,t )G(r )dr ≠ 0
V
V
V
98
~
⇒ u~ ≠ u~
(19)
In altre parole filtrando la funzione già filtrata non si riottiene la funzione filtrata: l’operatore di
filtraggio non si comporta come l’operatore di media alla Reynolds.
Figura 2. Effetto della operazione di filtraggio sulla funzione U(x).
Questa caratteristica dell’operazione di filtraggio, vista come operatore lineare, si esprime dicendo
che l’operatore di filtraggio non è idempotente.
Nella figura 2 viene illustrato l’effetto della operazione di filtraggio sulla funzione U ( x ) , effettuata
tramite un filtro a scatola. In tale figura gli andamenti della funzione filtrata U ( x ) e della funzione
filtrata della residua u ' ( x ) sono riportati in grassetto, gli andamenti della funzione originaria U e
della residua u' (x ) sono riportati a tratto semplice. Si nota come l’effetto del filtraggio consiste nel
far sì che la funzione filtrata riproduca l’andamento “generale” della funzione originaria,
regolarizzando ed eliminando i dettagli; lo stesso comportamento si ha per la funzione residua.
Naturalmente, al tendere a zero di ∆, la funzione filtrata deve coincidere con la funzione originaria,
e la funzione residua annullarsi, mentre al crescere di ∆ la funzione filtrata tende al valor medio
della funzione sul dominio del moto: l’operazione di filtraggio con il filtro a scatola dunque può
essere vista come un’operazione di media spaziale locale, essendo l’ampiezza del dominio su cui si
effettua la media dato da ∆.
Definizione delle equazioni di evoluzione dei campi filtrati, derivate dalla equazione di NavierStokes e di continuità.
Si consideri l’equazione di continuità:
div(u ) = 0
(20)
Si applichi ad essa l’operazione di filtraggio, tenendo conto dell’operazione di commutazione. Si
ottiene:
~) = 0
div(u
(21)
Considerando ora il campo di velocità decomposto in campo filtrato e residuo e sfruttando la
linearità dell’operatore divergenza si ottiene:
~ + u' ) = div(u
~ ) + div(u' ) = div(u' ) = 0
div(u ) = div(u
Pertanto sia il campo di velocità filtrato che quello residuo sono solenoidali.
99
(22)
Consideriamo ora le equazioni di Navier-Stokes, in cui il termine delle forze di corpo sia costante
(ad esempio la forza di gravità) e applichiamo ad esse l’operazione di filtraggio:
~
∂u
1
~ +f
p + ν∇ 2 u
+ ∇(u ⊗ u ) = − ∇~
∂t
ρ
(23)
Il termine (u ⊗ u ) , viene espresso solitamente nel modo seguente:
(u ⊗ u ) = ((u~ + u' ) ⊗ (u~ + u' )) = (u~ ⊗ u~ ) + (u~ ⊗ u' ) + (u' ⊗u~ ) + (u' ⊗u' ) =
~⊗u
~ ) − (u
~⊗u
~ ) + (u
~ ⊗ u' ) + (u' ⊗u
~ ) + (u' ⊗u' ) =
(u~ ⊗ u~ ) + (1
u
442443 14444244443
Sforzi di Leonard
τ
(24)
R
ρ
~⊗u
~ ) − (u
~⊗u
~) + τ
(u~ ⊗ u~ ) + (1
u
442443
Sforzi di Leonard
R
ρ
A terzo membro della (24) si possono distinguere gli sforzi di Leonard, calcolabili in funzione del
~ ⊗ u' ) + (u' ⊗u
~ ) e di sottogriglia (u' ⊗u' ) , riuniti nel
campo di velocità filtrato, gli sforzi incrociati (u
termine
τR
ρ
.
τ R tiene conto di tutte le interazioni tra le scale risolte e le scale non risolte: e’ chiaramente una
grandezza incognita e viene descritta esplicitamente tramite opportune relazioni di chiusura.
Nelle applicazioni LES si è dimostrato come gli sforzi di Leonard siano trascurabili rispetto agli
altri contributi di sforzo. Tale fatto verrà d’ora in avanti implicitamente tenuto in considerazione.
Come si vede, l’impostazione è analoga a quella che ha portato alla definizione della equazione
RANSE: in quel caso comparivano gli sforzi di Reynolds che dovevano essere modellati. In
conseguenza della decomposizione (24), l’equazione (23) diviene:
~
∂u
1
~ ⊗u
~ ) = − 1 ∇~
~ −f
p − ∇τ R + ν∇ 2 u
+ ∇(u
∂t
ρ
ρ
(25)
Il tensore degli sforzi di sottogriglia può essere decomposto in una parte isotropa
1 R
k I ed una
3
residua τ r :
1
1
1
τ R = k RI + τ R − k RI = k RI + τ r
3
3
3
(26)
1 R
k I , detta k R la traccia del tensore sforzo di sottogriglia: k R = τ 11R + τ 22R + τ 33R ,
3
1
viene inclusa nella pressione filtrata, ridefinita dalla: ( ~
p≡~
p + k R I ). In definitiva l’equazione (25)
3
diviene:
La parte isotropa
~
∂u
1
~ ⊗u
~ ) = − 1 ∇~
~ +f
p − ∇τ r + ν ∇ 2 u
+ ∇(u
∂t
ρ
ρ
(27)
100
Le equazioni (21) e (27) sono pertanto le equazioni filtrate, che vengono impiegate per la
determinazione dei campi di velocità e pressione filtrati.
Relazione di chiusura per il tensore di sforzo di sottogriglia
La più semplice relazione di chiusura per il tensore di sforzo di sottogriglia è quella di Smagorinsky
(1963) che, in ogni caso, è alla base di relazioni più complesse. La relazione o modello di
Smagorinsky si basa innanzitutto sul concetto di viscosità turbolenta dei moti residui. Si ipotizza
cioè che la parte anisotropa del tensore di sforzo di sottogriglia, sia proporzionale, tramite il
coefficiente di proporzionalità ν r , viscosità turbolenta dei moti residui, al tensore velocità di
~
deformazione D , ottenuto dal campo di velocità filtrata. Si pone, in altre parole:
~
τ r = −2 ρν r D
(28)
D’altra parte, la viscosità turbolenta dei moti residui deve essere assegnata. In analogia all’ipotesi
della lunghezza di mescolamento, si può porre che:
~ ~
ν r = l 2S 2D : D
(29)
in cui la cosiddetta scala spaziale di Smagorinsky l S viene assunta proporzionale all’ampiezza della
funzione filtro ∆, tramite il coefficiente di Smagorinsky:
l S = CS ∆
(30)
Di conseguenza, l’equazione filtrata di Navier Stokes assume la forma:
~
∂u
~
~ ⊗u
~ ) = − 1 ∇~
+ ∇(u
p + ∇ 2(ν +ν r )D + f
∂t
ρ
(
)
(31)
Si noti che con il modello di Smagorinsky, la soluzione delle equazioni avviene senza che sia
necessario specificare la forma del filtro, che infatti non appare nelle equazioni filtrate, essendo
stato trascurato il tensore di Leonard. Si deve invece assegnare la dimensione ∆, che appare
esplicitamente nella definizione della scala spaziale di Smagorinsky (30). In pratica è come se fosse
stato usato implicitamente il cosiddetto filtro di Smagorinsky, che può essere definito nel modo
seguente: si consideri la soluzione (ottenuta in qualche modo) delle equazioni filtrate con il modello
di Smagorinsky e la soluzione delle equazioni originarie. Tali soluzioni (nell’ambito del semplice
modello alla Smagorinsky) differiscono per il fatto che le viscosità sono rispettivamente pari
a:ν +ν r eν : pertanto la soluzione filtrata corrisponde alla soluzione che si otterrebbe dall’equazione
UL
. Si considerino gli
di Navier Stokes con un numero di Reynolds inferiore e pari a ReLES =
ν +ν r
~
spettri di energia cinetica turbolenta media E , E ottenuti rispettivamente con la soluzione delle
equazioni originarie e con quella delle equazioni filtrate: tra questi spettri vale la relazione:
2
~
E (k ) = G (k ) E (k )
(31)
in cui G (k ) è la trasformata di Fourier della funzione filtro G(r). In tal modo il filtro di Smagorinsky
può essere definito a posteriori, come l’unico filtro che permette di ottenere, dallo spettro esatto,
quello filtrato. Si noti comunque, che la forma del filtro può essere in ogni caso dedotta dalla (31)
101
se si dispone di una formula per lo spettro esatto: in tal caso infatti si può calcolare la radice del
rapporto tra lo spettro filtrato e quello esatto, antitrasformare secondo Fourier tale radice e ottenere
la forma del filtro di Smagorinsky G(r). Il punto cruciale nell’uso del modello di Smagorinsky è la
determinazione del coefficiente di Smagorinsky CS : esistono varie possibilità al riguardo, in
funzione soprattutto di come sia stata fissata la scala spaziale di soglia ∆. Fissando quest’ultima
nell’inertial subrange, ossia per η << ∆ < l EI (la scala spaziale di soglia è molto maggiore della
scala di Kolmogorov, ma inferiore alla scala spaziale in cui si comincia a rivelare l’anisotropia) si
trova in generale un valore pari a C S ≈ 0.17 , mentre valori più bassi ( C S ≈ 0.13 ) si ottengono per
valori della scala spaziale di soglia di ordine di grandezza che ricadono nel dissipative range:
η < ∆ < l DI .
Soluzione numerica
La soluzione delle equazioni filtrate viene ottenuta tramite opportune metodologie numeriche. Non
è questa la sede per illustrare tali metodologie numeriche e le relative problematiche. E’ tuttavia
opportuno osservare come la maggiore difficoltà posta alla base del problema di risolvere le
equazioni filtrate (che sono poi sostanzialmente l’equazione di Navier Stokes e l’equazione di
continuità) consista nel fatto che non si ha a disposizione una equazione per la pressione. Tale
difficoltà viene aggirata applicando l’operatore divergenza alla equazione di Navier Stokes filtrata:
~
∂u
1
~ ⊗u
~ ) + 1 ∇~
~ + f = 0
∇ ⋅
+ ∇(u
p + ∇τ R − ν ∇ 2 u
ρ
ρ
∂t
(32)
e tenendo conto della equazione di continuità. Si ottiene pertanto una equazione di Poisson per la
pressione:
~ ⊗u
~ ) − ∇ ⋅ (∇τ R )
∇2 ~
p = − ρ∇ ⋅ ∇(u
(33)
Che deve essere risolta unitamente alla equazione (27). In tal modo si determinano i campi di
pressione e velocità filtrati.
Per concludere questi brevi cenni sull’approccio LES alla turbolenza, è opportuno considerare
~ 1~ ~
l’equazione evolutiva dell’energia cinetica filtrata K = u
⋅ u . Quest’ultima si ottiene dalla (27)
2
moltiplicandola scalarmene per il campo di velocità filtrata ed effettuando alcune trasformazioni:
~
∂K ~ ~
1
~~
~
~ ~ ~
~ + τru
~ − 2νD
pu
+ u ⋅ ∇K = − ∇ ⋅ ~
u + τ r : D − 2νD : D + u
⋅f
∂t
ρ
(
)
(34)
La somma del primo e del secondo termine a primo membro forma la derivata totale rispetto al
tempo della energia cinetica filtrata. Il primo termine a secondo membro è un termine di trasporto, il
cui effetto consiste nel ridistribuire l’energia cinetica filtrata nel dominio del moto. L’ultimo
termine a secondo membro è un termine sorgente di energia cinetica. Infine il secondo e terzo
termine a secondo membro rappresentano rispettivamente la produzione di energia cinetica dei moti
residui e la dissipazione di quest’ultima. In generale il termine dissipazione di energia cinetica
filtrata è relativamente piccolo rispetto agli altri, specialmente se la scala spaziale di soglia è scelta
in modo tale che sia molto maggiore della microscala di Kolmogorov. L’effetto del termine
produzione di energia cinetica dei moti residui consiste in uno scambio di energia cinetica tra i moti
risolti e quelli residui. In generale tale scambio avviene in modo tale che energia cinetica viene
estratta dai moti filtrati e ceduta a quelli residui, in analogia a quanto avviene nello scambio tra
102
moto medio e moto di agitazione nell’approccio ala Reynolds, anche se, localmente, può verificarsi
il fenomeno del backscatter ossia della cessione inversa: i moti residui cedono energia ai moti
filtrati.
In conclusione, l’approccio LES fornisce una rappresentazione diretta dei moti contenenti energia e,
per questo motivo, il livello di descrizione fornito è più che sufficiente per la maggior parte degli
scopi. Il punto cruciale dell’approccio LES è sicuramente la scelta della scala spaziale di soglia ∆.
Generalmente ∆ è una funzione della posizione e del tempo che deve essere tale da poter risolvere
con sufficiente accuratezza i moti contenenti energia. Dal punto di vista del costo computazionale
l’approccio LES è intermedio tra il Reynolds stress model e l’approccio DNS (che si descrive nel
seguito). In generale comunque si presta bene alla soluzione di moti intrinsecamente tridimensionali
e non-stazionari.
L’approccio della DNS
La direct numerical simulation (DNS) consiste nel risolvere numericamente le equazioni di NavierStokes e di continuità, con condizioni iniziali e al contorno appropriate, così come sono, senza
effettuare alcuna decomposizione dei campi di velocità e pressione, quindi risolvendo tutte le scale
spaziali presenti. La DNS è rimasta irrealizzabile, finchè non si sono rese disponibili adeguate
risorse di calcolo. Dal punto di vista concettuale la DNS è l’approccio più semplice alla turbolenza
e, qualora possa essere applicato, è ineguagliabile in quanto ad accuratezza e livello di descrizione.
E’ tuttavia importante sottolineare che il costo computazionale è assai elevato e le risorse di calcolo
necessarie aumentano rapidamente all’aumentare del numero di Reynolds: allo stato attuale la DNS
è applicata a flussi con basso o moderato numero di Reynolds.
La soluzione numerica delle equazioni di Navier-Stokes e di continuità può avvenire in modi
diversi: tra i più usati vi sono le differenze finite e i metodi spettrali. Questi ultimi sono
particolarmente interessanti, perchè forniscono i campi di velocità e pressione direttamente in
termini di modi o contributi spettrali, cioè corrispondenti alle differenti scale spaziali. Per quanto
riguarda le differenze finite, la metodologia numerica si basa sul fatto che i campi di velocità e
pressione vengono descritti attraverso un numero finito di punti o nodi computazionali, attraverso la
soluzione di un sistema di equazioni algebriche che rappresentano le equazioni di partenza nei punti
computazionali, tramite l’approssimazione delle derivate con rapporti di differenze o incrementi
finiti. La soluzione alle differenze finite, contrariamente a quanto avviene con i metodi spettrali nei
quali i modi separatamente forniscono il contributo della singola scala spaziale, contiene i contributi
di tutte le scale spaziali. I metodi spettrali infatti forniscono la soluzione nello spazio dei numeri
d’onda e la soluzione nello spazio fisico deve essere ricostruita attraverso una operazione di
antitrasformazione di Fourier. Ciò che accomuna le metodologie numeriche spettrali e quelle basate
sulle differenze finite è l’elevato numero di modi o punti computazionali che devono essere presi in
considerazione. Questo numero viene infatti determinato dalla considerazione che ogni DNS, in
quanto si basa su una procedura discreta, è determinata dalla scelta di una scala spaziale minima che
può essere risolta. Tale scelta in pratica definisce la finezza della griglia computazionale ed è dettata
dalla potenzialità di calcolo che si ha a disposizione. Limitando gli esempi alle metodologie
numeriche basate sulle differenze finite, si dovrebbe fare in modo che la minima distanza tra due
punti computazionali δ s sia sufficientemente piccola da essere rappresentativa delle scale spaziali
dissipative. In altre parole:
14
ν 3
δ s ≈ η =
ε
(35)
essendo η la microscala di Kolmogorov. D’altra parte, detta U una scala spaziale rappresentativa
delle velocità ed L una scala spaziale rappresentativa dei moti ad alto contenuto energetico (dunque
103
confrontabile con la dimensione caratteristica del dominio del moto), la funzione di dissipazione
U3
. Si ha pertanto:
nella (36) può essere stimata tramite la: ε =
L
14
ν 3 L
δ s ≈ 3
U
⇒
δs
ν
≈
L UL
34
= Re −3 4
(36)
Il rapporto inverso L δ s è circa uguale al numero N di punti computazionali che si possono
individuare sulla dimensione L, posti alla distanza δ s . Si ha perciò:
L
δs
≈ N ≈ Re 3 4
(37)
Poiché si devono considerare le tre dimensioni spaziali, il numero totale di punti computazionali è
stimato dalla:
N 3 ≈ Re 9 4
(38)
D’altra parte, la soluzione numerica avanza nel tempo per passi discreti, di ampiezza δ t , fissata in
modo tale che la risoluzione nel tempo sia la migliore possibile e che il calcolo numerico sia stabile
rispetto alla propagazione degli errori. Normalmente si adotta un criterio del tipo:
δt ≈ C
δs
(39)
U
In cui C è un numero puro, minore di 1 ( C ≈ 0.05 ÷ 0.01 ). La durata totale T della DNS di un flusso
turbolento è tipicamente dello stesso ordine di grandezza della scala temporale caratteristica della
turbolenza:
T∝
L
U
(40)
In tal modo, il numero di passi temporali M necessario per realizzare una simulazione accettabile
della turbolenza è pari a:
U L
L
Re3 4
=
=
(41)
δ t Cδ s U C δ s
C
Per ogni passo temporale deve essere effettuato un numero di operazioni (flops) proporzionale ad N3
(38). Ammesso che il coefficiente di proporzionalità sia pari a 1000, il numero totale di operazioni
che deve essere effettuato dal calcolatore è dato dalla:
M≈
N TOT
T
=
Re 3
≈ 1000 × N × M ≈ 1000
= 10 5 Re 3
C
3
(42)
avendo scelto per C il valore C=0.01. Supponendo di avere a disposizione un calcolatore in grado di
effettuare un miliardo di operazioni al secondo (1 Gflop), il numero di operazioni che il calcolatore
può effettuare al giorno è pari a:
104
N DAY = 109 × 60 × 60 × 24 = 8.64 ×1013
(43)
Di conseguenza, il numero di giorni necessario per effettuare la DNS di un flusso caratterizzato da
un dato numero di Reynolds è dato dalla:
ng = 1.16 ×10 −9 Re3
(44)
In figura 3 è diagrammato l’andamento della (44). In ascisse vi è il numero di Reynolds, in ordinate
il tempo espresso in anni.
Figura 3. Andamento del tempo di calcolo espresso in anni al variare del numero di Reynolds.
Si vede come simulazioni DNS di moti turbolenti possono arrivare a richiedere migliaia di anni!
Nonostante queste difficoltà, la DNS è uno strumento prezioso e complementare agli studi
sperimentali sulla turbolenza: basti pensare al fatto che, grazie a simulazioni DNS, sono state
determinate statistiche sulle fluttuazioni di velocità e pressione altrimenti impossibili da ottenere
sperimentalmente: in altre parole la DNS si rivela essere una sorta di strumento di misura, le cui
dimensioni possono, entro certi limiti, essere ridotte finché si vuole e pertanto posizionabile in punti
in cui nessuno strumento di misura fisico può essere posto. I dettagli della turbolenza di parete,
tanto per fare un esempio, sono studiati con maggior facilità con la DNS che con le misure
sperimentali.
105
Capitolo VI. Trasporto e diffusione di sostanze nei corpi idrici
superficiali. Aspetti fondamentali.
Premessa
Il trasporto e la diffusione di sostanze (ad es. contaminanti, inquinanti, sedimenti in sospensione
etc.) o grandezze fisiche (ad es. variazioni di temperatura causate da scarichi a valle di impianti
industriali) all’interno di un corpo idrico superficiale – ove per corpi idrici superficiali si intendono
fiumi, laghi ed acque costiere – in moto turbolento sono fenomeni profondamente interconnessi.
Dal punto di vista applicativo, i problemi di trasporto e diffusione turbolenta di sostanze o
grandezze fisiche nei corpi idrici assumono rilevanza sempre maggiore: la comprensione di tali
problemi costituisce infatti la necessaria premessa ad ogni intervento volto a preservare e migliorare
la qualità dei fluidi ambientali.
In questo capitolo l’attenzione è rivolta al modello matematico fondamentale che governa i processi
di trasporto e diffusione, come necessaria premessa per affrontarne gli aspetti specifici nei singoli
corpi idrici.
L’equazione di trasporto-diffusione
L’equazione di trasporto-diffusione della concentrazione di sostanza c in un corpo fluido in
movimento assume la forma:
∂c
+ u ⋅ ∇c = ∇ ⋅ (D∇c )
∂t
(1)
in cui D è la diffusività molecolari della sostanza considerata, avente le dimensioni della viscosità
cinematica: m2 s-1. Nell’equazione (1) non sono messi in evidenza, per il momento, termini legati
alla turbolenza del moto: gli effetti diffusivi sono dunque esclusivamente molecolari.
Facendo riferimento alla concentrazione di sostanza c, è bene ricordare che l’equazione (1) può
essere ottenuta considerando il bilancio della massa di sostanza contaminante in un volume di
controllo infinitesimo dV. Ricordando che la concentrazione c è la massa di sostanza contenuta
nell’unità di volume, la massa δM contenuta nel volume infinitesimo dV è pari a: δM=cdV. La
variazione di massa all’interno del volume di controllo può avvenire solo in conseguenza di un
flusso di massa non nullo attraverso le superfici del volume, che nel caso presente si può distinguere
in flusso convettivo e diffusivo: il primo legato al moto del corpo fluido in cui la sostanza è
dispersa, il secondo, secondo la legge di Fick, legato al fatto che la sostanza contaminante tende
spontaneamente a diffondere da zone con concentrazione maggiore a zone con concentrazione
minore e dunque ai gradienti di concentrazione della sostanza.
In altre parole, facendo riferimento alla figura 1, si ha:
∂δM
= (q ce + qcu + q de + q du )
∂t
(2)
in cui q ce , q cu , q de , q du sono i flussi di massa diffusivi e convettivi entranti e uscenti. A secondo
membro della (2) appare ovviamente la somma algebrica dei flussi entranti e uscenti.
106
w
dz
u
x
z
v
x
y
dy
x
x
dx
Figura 1. Volume di controllo per il bilancio di massa della sostanza.
Il flusso convettivo viene calcolato con la:
q c = cu ⋅ ndS n
(3)
su ciascuna delle superfici di frontiera del volumetto, essendo n il versore normale entrante nel
volumetto e dS n la superficie attraverso cui avviene il flusso, avente per normale il versore n.
Il flusso diffusivo, secondo la legge di Fick sopra ricordata, può essere espresso dalla:
q d = − D∇c ⋅ ndS n
(4)
su ciascuna delle superfici di frontiera del volumetto.
In definitiva, esprimendo la somma algebrica dei flussi entranti e uscenti tramite uno sviluppo in
serie di Tayor e tenendo conto della equazione di continuità per il campo di velocità del fluido
( ∇ ⋅ u = 0 ), si ottiene esattamente la (1).
Si deve sottolineare il fatto che, nel ricavare la (1), è stato implicitamente ipotizzato che la sostanza
non reagisca col fluido ambiente o con altre sostanze presenti: sono pertanto assenti termini
sorgente o pozzo a secondo membro della (1).
E’ opportuno soffermarsi brevemente sull’ipotesi di Fick e riconoscere il fatto che può essere
riottenuta basandosi su considerazioni statistiche. Si considerino infatti due volumetti adiacenti
(figura 2) contenenti rispettivamente N1,N2 molecole di sostanza.
N2
N1
dx
dx
x
Figura 2. Schematizzazione statistica dell’ipotesi di Fick.
Tali molecole eseguono dei moti casuali, urtandosi l’una con l’altra e possono attraversare il
confine tra i due volumetti. Detta p la probabilità che si verifichi tale evento, le molecole che
attraversano il confine tra le due superfici da destra a sinistra e da sinistra a destra sono pari,
rispettivamente a:
107
(5)
N1 p , N 2 p
Di conseguenza, al termine del processo di “migrazione”, il numero di molecole a destra e a sinistra
è dato rispettivamente da:
N1n = N1 + ( N 2 − N1 ) p
(6)
N 2n = N 2 + ( N1 − N 2 ) p
Poiché il numero p è positivo e minore dell’unità, si vede chiaramente dalle (6) che il numero di
molecole maggiore diminuisce, quello minore aumenta: dunque il flusso netto avviene dalle zone
con maggior numero di molecole (maggiore concentrazione) verso zone con minor numero di
molecole (minor concentrazione). Nel caso esemplificativo rappresentato in figura 2,
N1 = 20 , N 2 = 10 , p = 0.1 . Il flusso di massa per unità di superficie può dunque essere espresso dalla:
(mN1 dx ) − (mN 2 dx )
2 c − c
2 dc
q = − p(mN1 − mN 2 ) = − pdx 2
= − pdx 1 2 ≈ − pdx
dx
dx
dx
(7)
ossia proporzionale al prodotto della differenza delle masse totali nei due volumetti, espresse come
il prodotto della massa di una molecola m per il numero di molecole, per la probabilità che le
molecole attraversino la superficie di separazione. Successivamente, si può far comparire la
differenza delle concentrazioni, semplicemente dividendo e moltiplicando per la dimensione del
volumetto dx. Il prodotto pdx 2 deve chiaramente essere costante, affinché il flusso non dipenda dal
dx, e rappresenta il coefficiente di diffusività.
E’ importante osservare che, in casi particolari, l’equazione (1) può essere risolta analiticamente.
Prima di prendere in considerazione alcune di queste soluzioni, di effettivo interesse nelle
applicazioni, è opportuno considerare il caso fondamentale di coefficiente di diffusività D e vettore
velocità u costanti e dominio di integrazione monodimensionale illimitato. Innanzitutto l’equazione
(1) assume la forma:
∂c
∂c
∂ 2c
+u = D 2
∂t
∂x
∂x
(8)
Si consideri la seguente trasformazione di variabili:
ξ = x − u t
τ = t
(9)
il cui effetto sulle operazioni di derivazione è il seguente:
∂ ∂ξ ∂
∂
∂x = ∂ξ ∂x + ∂τ
∂ = ∂ ∂ξ + ∂
∂t ∂ξ ∂t ∂τ
∂τ
∂
=
∂x ∂ξ
∂
∂τ
∂
= −u
+
∂t
∂ξ ∂τ
(10)
Di conseguenza, l’equazione (8), si trasforma nella:
108
∂c
∂ 2c
=D 2
∂τ
∂ξ
(11)
in cui il termine convettivo è stato eliminato.
Volendo integrare tale equazione in un dominio spaziale illimitato, con condizione iniziale:
c(ξ ,0 ) = f (ξ )
(12)
si può adottare la tecnica della separazione delle variabili. Si può cioè porre la soluzione della (11)
nella forma:
c(ξ ,τ ) = χ (ξ )θ (τ )
(13)
e sostituirla nella (5). Si ottiene:
θ&
χ' '
=D
θ
χ
(14)
In cui il puntino indica derivazione rispetto a τ e l’apice derivazione rispetto a ξ. La (14) è
soddisfatta se primo e secondo membro sono costanti:
θ&
2
= −λ D
θ
χ ' ' = − λ2
χ
(15)
essendo λ un parametro.
Le soluzioni delle equazioni (15) e, di conseguenza, l’espressione della c, sono date dalle:
θ = e −λ Dt
χ = A cos(λξ ) + B sin(λξ )
− λ2 Dt
c = χθ = ( A cos(λξ ) + B sin(λξ ))e
2
(16)
essendo A, B costanti d’integrazione.
Il parametro λ può assumere tutti i valori reali. Per ogni valore reale di λ si ha una soluzione e una
coppia di costanti A, B. La soluzione generale può essere pertanto espressa come la somma di tutte
le soluzioni particolari, ottenute al variare di λ tra i numeri reali:
c(ξ ,τ ) =
+∞
∫ ( A(λ )cos(λξ ) + B(λ ) sin(λξ ))e
− λ2 Dτ
dλ
(17)
−∞
Nella (17) si è messo in evidenza il fatto che le costanti A, B dipendono dal parametro λ.
A questo punto è possibile imporre la condizione iniziale:
f (ξ ) =
+∞
∫ ( A(λ )cos(λξ ) + B(λ ) sin(λξ ))dλ
(18)
−∞
109
Dalla (18) si deduce che le A, B coincidono rispettivamente con parte reale e immaginaria della
trasformata di Fourier spaziale della condizione iniziale f (ξ ) :
A(λ ) =
B(λ ) =
1
2π
1
2π
+∞
∫ f (η )cos(λη )dη
−∞
(19)
+∞
∫ f (η ) sin(λη )dη
−∞
Essendo η una variabile muta d’integrazione. Dunque risostituendo le (19) nella (17) si ottiene
l’espressione finale della soluzione della equazione (8):
c(ξ ,τ ) =
1
2π
+∞ −λ2 Dτ
(
)
f
η
∫−∞ −∫∞e cos(λ (η − ξ ))dλ dη
+∞
(20)
L’espressione (20) può essere ulteriormente semplificata, tenendo conto che:
+∞
∫e
−∞
−λ2 Dτ
π −
cos(λ (η − ξ ))dλ =
e
Dτ
(η −ξ )2
4 Dτ
1
⇒ c(ξ ,τ ) =
2 πDτ
+∞
∫ f (η )e
−
(η −ξ )2
4 Dτ
dη
(21)
−∞
Il significato della forma integrale della soluzione (21) può essere interpretato nel modo seguente: la
−
(η −ξ )2
e 4 Dτ
può essere vista come una funzione densità di soluzione, tale per cui il
2 πDτ
contributo alla soluzione dato dalla distribuzione iniziale della sostanza contaminante nell’intervallo
[η , η+dη] è dato da: f (η )ρ s (η ,ξ )dη . Si osservi che se la forma della funzione f (ξ ) , distribuzione
iniziale di sostanza contaminante, è tale da presentare un picco isolato in un punto ed essere nulla
altrove, ossia è tale da essere rappresentata matematicamente dal prodotto di un delta di Dirac12 per
la massa M di sostanza rilasciata da una sorgente puntiforme, la formula (21) diviene:
funzione: ρ s (η ,ξ ) =
c(ξ ,τ ) =
+∞
M
2 πDτ
∫ δ (η )e
−
(η −ξ )2
4 Dτ
−∞
dη =
M
2 πDτ
e
−
ξ2
4 Dτ
(22)
che riportata nelle variabili originarie, assume l’espressione:
c ( x ,t ) =
M
2 πDt
e
−
( x −ut )2
(23)
4 Dt
Si osservi ora quanto segue:
12
δ (x − x0 ) = 0 , x ≠ x0
La funzione delta di Dirac è definita nel modo seguente:
. Gode delle seguenti proprietà
δ (x − x0 ) ≠ 0 , x = x0
+∞
+∞
−∞
−∞
fondamentali: ∫ δ (x − x 0 )dx = 1,
∫ f (x )δ (x − x0 )dx = f (x0 )
110
. In pratica è un impulso posto in x = x 0 .
1. la soluzione diviene singolare per t = 0 (deve tendere ovviamente a diventare la funzione
delta di Dirac);
2. per t > 0 il delta di Dirac si trasforma in una gaussiana con valor medio ξ=ut e varianza
σ = 2 Dt ; ossia diviene sempre più allargata, con picco più smussato e asse di simmetria
traslato nella direzione positiva del moto per effetto del trasporto causato dalla velocità u
(figura 3);
Figura 3. Profili di concentrazione al crescere del tempo. M= 1 kg
3. la massima intensità di concentrazione, che si ha sempre per x = ut , decade come t −1 2
(figura 4).
Figura 4. Andamento della massima concentrazione al variare del tempo. . M= 1 kg
Quest’ultima osservazione permette di stimare come evolve nel tempo la dimensione della regione
occupata dalla sostanza. La concentrazione è infatti il rapporto tra la quantità di sostanza e il
volume occupato dalla sostanza stessa. Di conseguenza l’integrale della concentrazione esteso al
dominio occupato dalla sostanza deve eguagliare la quantità di sostanza presente. Se non vi sono
prelievi o immissioni di sostanza o se quest’ultima è non reagente, la quantità di sostanza deve
essere costante. Si può semplicemente imporre che tale quantità sia pari al prodotto della massima
concentrazione, all’istante t generico, per una dimensione geometrica b(t) caratteristica della parte
di dominio occupata dalla sostanza:
M
2 πDt
b(t ) = M
(24)
111
si ottiene pertanto che la dimensione caratteristica b(t) si espande secondo la legge:
b(t ) = 2 πDt
(25)
Dunque al diminuire della concentrazione nel tempo, corrisponde un aumento della zona occupata
dalla sostanza contaminante: fatto che accade quando si versa una goccia di inchiostro nell’acqua; si
osserva un graduale aumento della zona colorata cui corrisponde una diminuzione dell’intensità del
colore. L’aumento nel tempo della dimensione geometrica occupata dalla sostanza avviene con
legge proporzionale a t1/2: tale fatto è caratteristico dei processi diffusivi Fickiani, ossia descritti da
equazioni in cui il termine diffusivo sia stato descritto secondo la legge di Fick.
Approccio statistico allo studio della dispersione di sostanza. Il
problema di Taylor
Il moto turbolento influenza profondamente i processi diffusivi di sostanze o di grandezze fisiche:
tale fatto è stato messo in luce dalla decomposizione delle grandezze fisiche in valore medio e
fluttuazione e dalla successiva comparsa, causata dalla non linearità delle equazioni di bilancio, di
termini espressi da correlazioni del secondo ordine nelle fluttuazioni, i quali possono essere
espressi, tramite l’ipotesi di eddy diffusivity, proprio come termini diffusivi.
Lo studio della dispersione di sostanza in un corpo idrico in moto turbolento può però anche essere
affrontato con un approccio puramente statistico, tramite il quale si riottene, per altra via, la
conferma del fatto che l’effetto del moto turbolento può essere visto come conseguenza di un
processo diffusivo. L’approccio statistico di cui si parla, dovuto a Taylor (1921), costituisce dunque
una prova a supporto dell’ipotesi di eddy diffusivity, largamente adottata nello studio dei processi di
dispersione dei contaminanti nei corpi idrici superficiali. Nel seguito verranno descritti tale
approccio e le sue conseguenze.
E’ necessario premettere che si avrà a che fare con realizzazioni di eventi tra loro identici, per
quanto riguarda le condizioni iniziali e al contorno, e consistenti nel rilascio di una certa quantità di
sostanza contaminante passiva (non in grado di modificare il campo di moto) e non reagente in un
corpo fluido in moto turbolento. Si può assimilare la quantità di sostanza nel dominio fluido ad un
“punto colorato”, la cui posizione istantanea può essere considerata come una variabile aleatoria
continua. Di conseguenza, il valore atteso o medio della componente xi del vettore posizione x del
punto occupato dalla sostanza, calcolato rispetto ad un numero elevatissimo (teoricamente infinito)
di realizzazioni dell’evento, è dato dalla:
+∞
xi =
∫ x p(x | (x
i
i
0i
,t 0 ),t )dxi
(26)
−∞
essendo p( xi | (x 0i ,t 0 ),t ) la densità di probabilità che la componente xi del vettore posizione x
della particella fluida sia compresa tra xi e xi +dxi al tempo t, con la condizione che al
tempo t 0 sia stata x0i. Si possono similmente definire i momenti statistici di ordine k tramite la:
xi
k
+∞
=
∫ x p(x | (x
k
i
i
0i
,t 0 ),t )dxi
(27)
−∞
come pure le correlazioni tra componenti xi , x j delle posizioni assunte da una particella in due istanti
diversi:
112
B
km
x1x 2
(x
0i
, x 0 j , t 0 , t1 , t 2 ) =
+∞ +∞
∫ ∫x
k
1i
x 2mj p (x1i ,x 2 j | (x0i , x 0 j ,t 0 ),t1 ,t 2 )dx1i dx 2 j
(28)
− ∞− ∞
essendo p (x1i ,x 2 j | (x10i , x 20 j ,t 0 ),t1 ,t 2 ) la densità di probabilità che la componente xi del vettore
posizione x della particella fluida sia compresa tra x1i e x1i+dx1i al tempo t1, tra x2i e x2i+dx2i al
tempo t2, con la condizione che al tempo t 0 siano state rispettivamente x0i , x0 j . Assumono
particolare significato il momento statistico del secondo ordine della variabile xi − xi e la
correlazione B11
xi x j
2 +∞
2
σ x = ∫ (xi − xi ) p( xi | (x 0i ,t 0 ),t )dxi
−∞
+ ∞+ ∞
B 11 (x , x ,t ,t ) =
∫ ∫ xi x j p(xi , x j | (x0i , x0 j ,t 0 ),t )dxi dx j
xi x j 0i 0 j 0
− ∞− ∞
(29)
rispettivamente la varianza della posizione di una particella fluida ad un dato istante e la
correlazione tra le coordinate della posizione della particella rispetto alle realizzazioni dell’evento.
Le proprietà statistiche della posizione x si dicono stazionarie e omogenee se indipendenti
rispettivamente dall’istante t 0 e dalla posizione iniziale x 0 e dipendenti esclusivamente dalle
differenze x − x 0 ,t − t 0 .
Anche la concentrazione di una sostanza c viene considerata come una variabile aleatoria. Si
considerino infatti una serie di realizzazioni dell’evento consistente nel misurare la concentrazione
di sostanza c associata ad una particella fluida all’istante t e nel punto x, che, all’istante t 0 , nella
posizione x 0 , valeva c 0 ; il valore medio della concentrazione rispetto a tali realizzazioni è dato
dalla:
+∞
c = ∫ cp(c | (c0 , x 0 ,t 0 ),t )dc
(30)
0
con ovvio significato della funzione densità di probabilità p(c | (c0 , x 0 ,t0 ),t ) . Nel caso in cui la
densità di probabilità p non dipenda dall’istante, dalla concentrazione e dalla posizione
iniziali c0 , x 0 ,t 0 , le proprietà statistiche della concentrazione sono omogenee e stazionarie.
Si immagini ora di voler valutare lo spostamento di una particella fluida in moto turbolento
statisticamente stazionario e omogeneo. Il campo del moto sia inoltre caratterizzato dall’avere
valore medio nullo. Tale requisito può essere soddisfatto facilmente se ci poniamo in un sistema di
riferimento in moto con velocità di traslazione pari a quella media. Si consideri la ripetizione
dell’evento consistente nel seguire una particella fluida rilasciata nel corpo fluido in una posizione
ed in un istante iniziali e si consideri, per semplicità, di voler valutare lo spostamento in direzione x.
Per effetto del campo di velocità fluttuante u, la particella effettua uno spostamento non nullo pari
a:
x = ∫ u (t' )dt'
t
(31)
0
Il quadrato della distanza è dato da:
113
t
t
x 2 = ∫ u (t' )dt' ⋅ ∫ u (t' )dt'
0
0
(32)
da cui si può ricavare il tasso di crescita della distanza nel tempo:
t
dx 2
dx
= 2x
= 2∫ u (t ) ⋅ u (t' )dt'
0
dt
dt
(33)
Le formule sinora considerate valgono per una singola realizzazione dell’evento. Considerando una
molteplicità di eventi si può ottenere il valore atteso della derivata temporale del quadrato della
distanza, applicando un operazione definita come caso particolare della (28):
+∞ +∞
(
)
(
)
⋅
=
u
t
u
t
'
∫ ∫ u(t )u(t' ) p(u(t ),u(t' ) | (u0 ,t 0 ),t ,t' )du(t )du(t' )
− ∞− ∞
2
t
d x
= 2∫ u (t ) ⋅ u (t' ) dt'
0
dt
La grandezza Q = u (t )u (t' )
(34)
può essere vista come un coefficiente di autocorrelazione della
velocità, ossia indica quanto la velocità u (t ) ha a che fare con se stessa all’aumentare del modulo
della differenza t − t' . Per t=t’ la correlazione è massima e la grandezza Q coincide con lo scarto
quadratico medio della velocità u 2 . All’aumentare del modulo della differenza t − t' , Q tende a
zero, perché la velocità u perde ogni correlazione con se stessa. Per questo motivo si può porre:
t
lim ∫ Qdt' = 2 u 2 TL
(35)
t →∞ 0
in cui TL è definito come tempo di correlazione lagrangiano o scala temporale della turbolenza
ed è una misura dell’intervallo di tempo durante il quale la particella fluida conserva memoria delle
circostanze del suo rilascio. In definitiva quindi la (34) può essere scritta nella forma:
d x2
dt
t
= 2∫ Qdt'
(36)
0
e si possono distinguere due casi: t << TL e t >> TL . Nel primo caso, l’integrale viene calcolato su un
intervallo di tempo piccolo rispetto al tempo TL : durante tale intervallo è possibile ritenere costante
il coefficiente di autocorrelazione Q e pari al suo valore massimo u 2 . Di conseguenza, l’integrale
(36) vale:
d x2
dt
≈ 2 u2 t
(37)
La (37) può essere integrata per ottenere x 2 :
x2 ≈ u2 t 2
(38)
114
Considerando la radice quadrata di entrambi i membri della (38), si può infine ottenere una stima
della distanza percorsa dalla particella fluida, per t << TL :
lx =
x2 ≈
u2 t
(39)
In altre parole, per t << TL , la particella fluida si muove di moto uniforme, con velocità stimata
dalla
u 2 , essendo u 2
il valore del coefficiente di autocorrelazione della velocità all’istante
del rilascio della particella. Nel caso in cui t >> TL , la (36) può essere approssimata dalla:
d x2
dt
≈ 2 u 2 TL
(40)
che fornisce la seguente stima per la distanza percorsa dalla particella fluida:
x 2 = 2 k u 2 TL t ⇒ l x =
x 2 = 2 k u 2 TL t
(41)
in cui k è una costante di proporzionalità. Nelle altre direzioni spaziali valgono formule analoghe
alla (39) e alla (41) per quanto riguarda le distanze l x ,l y percorse dalla particella fluida per effetto
del moto di agitazione.
L’analisi di Taylor ha dunque mostrato che per istanti di tempo t >> TL , a causa del fatto che le
correlazioni tra le velocità fluttuanti si annullano, la media d’insieme del quadrato della distanza
percorsa dalla particella fluida cresce proporzionalmente al tempo t.
Si mettano ora a confronto la formula (25) e la (41). La prima fornisce la stima della dimensione
spaziale raggiunta, all’istante t, dalla regione occupata dalla sostanza e ottenuta dalla soluzione
fondamentale della equazione della diffusione (1), la seconda fornisce la stima della distanza
percorsa da una particella di sostanza per l’effetto della turbolenza: dunque è una stima dell’effetto
diffusivo legato al moto turbolento, poiché si può pensare che un insieme di particelle di sostanza,
immesse nello stesso punto e allo stesso istante nel medesimo campo di moto turbolento, si
distribuirebbero all’interno di una regione spaziale la cui dimensione caratteristica avrebbe un
ordine di grandezza dato proprio dalla (41). E’ quindi possibile definire una diffusività D’ legata
alla turbolenza, indipendente dalla storia del moto, eguagliando la formula (25), in cui si pone D’, e
la formula (41):
4πD' t = k 2 u 2 TL t ⇒ D' = k * u 2 TL
(42)
Nella costante k * si raggruppano ovviamente tutti i fattori numerici di proporzionalità.
Il ragionamento sinora seguito porta pertanto a concludere che, visto che per tempi t >> TL l’effetto
diffusivo dei moti di fluttuazione su un insieme di particelle di sostanza è tale da produrre una
“nuvola” avente dimensione caratteristica stimata dalla (41), coincidente con il valore che si
determinerebbe dalla soluzione fondamentale dell’equazione (1) con coefficiente di diffusività D’
(42), si può ammettere che anche nel caso di moto turbolento è possibile modellare il processo
diffusivo con una equazione del tipo (1), con opportuna definizione della D’. La qual cosa giustifica
a posteriori l’ipotesi di eddy diffusivity introdotta precedentemente.
La diffusione nel moto turbolento è dovuta all’effetto dei moti fluttuanti: per questo si parla più
frequentemente di dispersione o diffusione –dispersione, per distinguere gli aspetti della diffusione
115
molecolare da quelli della dispersione dovuta al moto turbolento. L’importanza reciproca dei due
aspetti è messa in evidenza da opportune considerazioni di carattere dimensionale. Se infatti nel
termine diffusivo della (1) si distingue il contributo dato dalla diffusione molecolare e quello dato
L
dalla diffusione turbolenta e si adottano opportune scale delle lunghezze L, velocità U 0 e tempi
U0
si ha:
*
2
*
2 L
*
D' = k u 0 TL ∝ k U 0 U = k U 0 L
0
∂c + u ⋅ ∇c = ∇ ⋅ (D∇c + D' ∇c ) = U L∇ ⋅ D ∇c + k * ∇c
0
U L
∂t
0
(43)
ossia il termine della diffusione molecolare è moltiplicato per l’inverso del numero di Peclet:
1
D
ν D
=
=
Pe U 0 L U 0 L ν
(44)
1
D
= .
Pr ν
Quest’ultimo numero, rapporto tra la viscosità cinematica e la diffusività molecolare della sostanza,
ha sempre ordine di grandezza unitario. Il Reynolds è invece sempre piuttosto elevato nei flussi
turbolenti: si può pertanto concludere che gli effetti dispersivi (diffusione dovuta ai moti fluttuanti)
siano sempre predominanti, laddove presenti, rispetto a quelli della diffusione molecolare.
In linea di principio, il ragionamento seguito permette di definire dei coefficienti di diffusività
turbolenta in grado di tener conto della eventuale anisotropia dei moti turbolenti. Generalizzando la
definizione (42) si può infatti definire un coefficiente di diffusività turbolenta D' ij legato
definito come il prodotto dell’inverso del Reynolds per l’inverso del Prandtl:
all’interazione dei moti fluttuanti nelle direzioni i,j:
D' ij =
d xi x j
dt
∝ 2 u i u j TLij
(45)
che permette ad esempio di esprimere le interazioni c' u' , θ ' u' nelle equazioni di bilancio della
sostanza contaminante e della temperatura secondo le definizioni seguenti:
∂c
c' u i ' = − D' ij ∂x
j
θ ' u ' = − D' ∂θ
ij
i
∂x j
(46)
TLij è la scala temporale lagrangiana definita dalla formula:
∞
∫
0
u i (t )u j (t' ) + u i (t' )u j (t )
2
dt' = u i (t )u j (t ) TLij
(47)
116
L’equazione della diffusione-dispersione per la sostanza contaminante diviene pertanto:
∂c
∂c
∂
+uj
=
∂t
∂x j ∂xi
∂c
⋅ Dij
∂x j
(48)
In pratica, stante la difficoltà di determinare sperimentalmente i coefficienti (45) per i ≠ j , si
considerano solo i coefficienti di diffusività turbolenta con indici uguali:
Dii =
d xi2
dt
= u 02i TL
(49)
Il fatto che, per t >> TL , l’effetto del moto fluttuante sulla diffusione di un insieme di particelle di
sostanza possa essere descritto dalla equazione (1) con opportuna definizione del coefficiente di
diffusività, può essere ulteriormente confermato dalla considerazione del processo stocastico a
cammino casuale semplice.
Tale processo, applicato al problema sinora considerato, consiste nel fatto che una particella fluida
che si trova in x, all’istante t, può provenire sia dalla posizione x+=x+∆x o dalla posizione x-=x-∆x,
nell’istante t-=t-∆t (figura 3). Di conseguenza la probabilità che la particella fluida arrivi in x, al
tempo t, partendo da x+ o x- in t- è data da:
p( x | ( x0 ,t 0 ),t ) = p( x − ∆x | (x 0 ,t 0 ),t − ∆t )q + + p( x + ∆x | ( x0 ,t 0 ),t − ∆t )q −
(50)
t
t-
x
x0, t0
x-
x
x+
Figura 5. Schematizzazione del cammino casuale semplice
essendo: x0 ,t 0 , q + , q − rispettivamente la posizione e l’istante iniziale da cui parte la particella e le
probabilità che, partendo dalla penultima posizione, vada verso destra o sinistra. Le probabilità
q + , q − godono ovviamente della proprietà: q + + q − = 1 . Ossia l’evento dato dall’unione degli eventi
consistenti nel fatto che la particella vada a destra o a sinistra è certo. In particolare si può porre:
1
∆t
q + = 2 1 + η ∆x
q = 1 1 − η ∆t
− 2
∆x
(51)
117
∆t
≤ 1 . Sviluppando il secondo membro della
∆x
(50) in serie di Taylor di punto iniziale x,t e tenendo conto della (51) si ottiene:
in cui η è un parametro positivo e tale per cui 0 ≤ η
∂2 p
∂p
∂p ∆x 2 ∂ 2 p ∆t ∂ 2 p
2 −
−
∆
+K = 0
+η
−
x
2 ∂t 2
∂x∂t
∂t
∂x 2∆t ∂x
∆x 2
∆x 2
2
Facendo tendere a zero ∆x , ∆t e assumendo un limite finito per
(α =
) si ottiene:
∆t
∆t
∂p
∂p α 2 ∂ 2 p
+η
=
∂t
∂x
2 ∂x 2
(52)
(53)
ossia un’equazione che ha la stessa forma della (1). La funzione densità di probabilità p, esprimente
la probabilità che la variabile aleatoria x assuma all’istante t un valore compreso tra x e x+dx, a
condizione che abbia assunto il valore x0 all’istante t0, essendo data dalla soluzione fondamentale
della (53), coincide con la gaussiana. In altre parole, la varianza della posizione della particella,
vista come variabile aleatoria, aumenta nel tempo con legge proporzionale a t. Si deve notare che
nel cammino causale semplice, il tempo di correlazione lagrangiano è nullo: lo spostamento della
particella non è influenzato in alcun modo dagli spostamenti effettuati negli intervalli precedenti.
Il problema di Richardson
Si vuole ora considerare il problema della diffusione-dispersione di sostanza per tempi minori della
scala temporale lagrangiana. Tale problema assume rilevanza laddove la turbolenza del corpo idrico
sia caratterizzata da scale spaziali maggiori di quelle caratteristiche delle nubi di sostanze (regioni
costiere di grande dimensioni, laghi, mari ed oceani), mentre è di scarsa importanza laddove le
dimensioni delle nubi di sostanza siano confrontabili con quelle delle scale spaziali della turbolenza
del corpo idrico (fiumi, torrenti, piccoli estuari). L’approccio di Taylor, se i tempi sono minori della
scala temporale lagrangiana, si limita a fornire il risultato consistente nel fatto che la dimensione
geometrica caratteristica della zona occupata dalla sostanza cresce linearmente nel tempo (formula
(39)), ma non permette di formulare ipotesi sul modello diffusivo. Si può comunque intuire che se
le scale temporali sono minori della scala lagrangiana, i processi diffusivo-dispersivi non possono
essere governati da una equazione in cui i coefficienti di diffusività siano indipendenti dalla storia
del moto e dati dall’espressione (46) o (42). Tale fatto mette in luce l’esistenza di problemi di
diffusione-dispersione governati da modelli in cui l’equazione di diffusione-dispersione (1) assume
forme nuove e anche molto complesse, potenzialmente derivabili da modelli di diffusione non
Fickiani. Richardson affrontò il problema della diffusione di nuvole di sostanze contaminanti
immerse in domini fluidi in moto turbolento per tempi minori della scala temporale lagrangiana. E’
opportuno considerare, sia pur brevemente la linea di pensiero seguita da Richardson.
Si consideri il rilascio isolato di una nuvola di sostanza in un corpo fluido in moto turbolento con
caratteristiche omogenee e stazionarie. Si vuole valutare l’effetto del moto turbolento sulla nuvola
di sostanza caratterizzata da una dimensione geometrica, il cui ordine di grandezza sia r, nell’ipotesi
che, durante il moto, r sia sempre tale che: η << r << L , essendo L,η rispettivamente una scala
spaziale caratteristica dei moti turbolenti a grande scala e la microscala di Kolmogorov. In
conseguenza di tale ipotesi, la scala dei tempi caratterizzanti la deformazione della nuvola è
sicuramente inferiore alla scala temporale lagrangiana del campo di moto turbolento in cui è
immersa.
118
Si consideri inoltre di studiare l’espansione della nuvola in un sistema di riferimento che trasli con
velocità pari alla velocità media del flusso, supposta stazionaria. Detta c la concentrazione della
sostanza in un dato istante ed in un punto occupato dalla nuvola, è possibile definire r tramite le:
∫ xcdV
V
x c =
∫ cdV
V
(x − x c )2 cdV
∫
r 2 = V
∫ cdV
V
(54)
in cui x ,x c ,V rappresentano rispettivamente la posizione della particella generica costituente la
nuvola, la posizione del centro di figura della nuvola e il volume istantaneo di quest’ultima. Si
possono inoltre definire le medie d’insieme delle quantità definite dalle (54) nel modo seguente:
xc =
∫ x c dV
V
∫
c dV
, r
2
=
∫ (x −
xc
)
2
c dV
V
∫
(55)
c dV
V
V
Ciò che interessa nell’introduzione delle definizioni (55) è la possibilità di identificare nella c ,
ossia nella media d’insieme della concentrazione, una sorta di densità di probabilità della variabile
aleatoria x, posizione della particella all’interno della nube, della quale x c rappresenti il valore
medio o atteso e r 2 lo scarto quadratico medio. E’ stato dimostrato da Kolmogorov (1931) che, in
condizioni di turbolenza omogenea, se le scale temporali rispetto alle quali si osserva il fenomeno
sono tali da ritenere le deformazioni attuali della nube scorrelate da quelle iniziali, la densità di
probabilità c soddisfa una equazione di diffusione-dispersione, il cui coefficiente di diffusività è
dato dalla derivata temporale della r 2 .
Allo scopo di definire la
d r2
si consideri che nel problema di Richardson i moti a grande scala
dt
sono efficaci ai fini del trasporto della nuvola, nel senso che la trasportano senza deformarla
sensibilmente, mentre i moti a piccola scala la deformano, poiché influenzano le mutue distanze tra
le particelle costituenti la nuvola. Sia allora u r una scala di velocità caratteristica dei moti a piccola
scala. La dissipazione ε potrà essere stimata dalla:
u r3
ε≈
r
⇒ u r ≈ (ε r )
13
(56)
D’altra parte la velocità u r è connessa al tasso di variazione temporale della dimensione
caratteristica della nuvola: di conseguenza si potrà porre:
dr
13
≈ (ε r )
dt
(57)
119
Moltiplicando primo e secondo membro della (57) per r si ottiene la:
dr 2
= Gε 1 3 r 4 3
dt
(58)
anche nota come legge dei quattro terzi di Richardson, in cui G è una costante universale.
L’equazione (58) è valida se è trascorso un tempo sufficiente affinché le condizioni di deformazione
della nuvola, al tempo in cui è stata rilasciata, non influenzino la deformazione attuale. Operando la
media d’insieme della equazione (58) si ottiene infine una stima della variazione rispetto al tempo
d r2
2
della r :
= Gε 1 3 r 4 3 .
dt
Ora, in analogia alle definizioni (42) o (46), è possibile definire la diffusività turbolenta della
concentrazione media d’insieme come:
DT = Gε 1 3 r (t )
43
(59)
in cui si mette in evidenza la dipendenza del coefficiente di diffusività dalla storia del moto.
E’ opportuno sottolineare ancora una volta la differenza tra i problemi di Taylor e di Richardson e
la loro importanza.
Il problema di Taylor riguarda l’effetto diffusivo del moto turbolento sulla singola particella di
sostanza. Il risultato importante consiste nel fatto che per tempi maggiori della scala lagrangiana
l’effetto del moto turbolento può essere descritto tramite la equazione della diffusione fickiana, in
cui il coefficiente della diffusività è stimato dalla formula (42).
Il problema di Richardson riguarda l’effetto diffusivo del moto turbolento su una nuvola di sostanza
avente dimensione spaziale caratteristica notevolmente inferiore a quella del moto turbolento di
larga scala, dunque in condizioni tali per cui le scale temporali dei moti di deformazione della
nuvola sono notevolmente inferiori alla scala temporale lagrangiana. Sfruttando un importante
risultato dovuto a Kolmogorov, si conclude che l’effetto del moto turbolento può essere descritto
tramite la equazione della diffusione (1), in cui però il coefficiente della diffusività è stimato dalla
formula (59): tale coefficiente dipende dalla storia del moto e costituisce perciò un modello di
diffusione non fickiana.
Applicazioni.
1.Soluzioni della equazione del trasporto-diffusione (8) in casi notevoli
1.1 Dominio illimitato con distribuzione spaziale iniziale della concentrazione.
E’ opportuno ricordare la formula della soluzione fondamentale della equazione (11):
1
c(ξ ,τ ) =
2 πDτ
+∞
∫ f (η )e
−
(η −ξ )2
4 Dτ
dη
(60)
−∞
in cui c(x,0)=f(x) è la condizione iniziale sulla concentrazione. Specificando la forma di f si
ottengono i diversi andamenti della concentrazione. Un esempio interessante è costituito dalla
funzione a gradino:
f ( x ) = c0 , x ≥ 0
f (x ) = 0, x < 0
(61)
120
In corrispondenza a tale condizione iniziale l’integrale (60) assume la forma:
c(ξ ,τ ) =
+∞
c0
2 πDτ
∫e
−
(η −ξ )2
4 Dτ
dη
(62)
0
suscettibile di un’integrazione analitica. Posto infatti: u =
η −ξ
, dη = 2 Dτ du e cambiando di
2 Dτ
conseguenza i limiti di integrazione, il calcolo dell’integrale (60) fornisce:
c(ξ ,τ ) =
c0
π
+∞
−u
∫ e du =
−ξ 2 Dτ
2
c0
π −ξ
+∞
c
x − Ut
−u 2
−u 2
e
du
+
∫
∫0 e du = 20 1 + erf 2 Dt . In cui erf è la
2 Dτ
0
funzione degli errori, definita come: erf ( z ) =
2
π
z
∫e
−u 2
du . Nell’ultimo passaggio si è ritornati alle
0
variabili fisiche. Nella figure 6a,6b, viene mostrato l’andamento spaziale della concentrazione, con
parametro il tempo. Nella figura 6a il trasporto è nullo, essendo stato posto U=0. Si vede come
l’effetto della diffusione consista nella progressiva regolarizzazione del gradiente iniziale di
concentrazione (singolare in x=0), tale da portare, per t→∞, alla concentrazione uniforme, pari alla
metà del valore iniziale c0.
Figura 6a. Andamento della concentrazione nel tempo e nello spazio nel dominio illimitato a seguito di una condizione
iniziale a gradino. U=0 m/s, c0=1 kg/m3, D=2.5m2/s
121
Figura 6b. Andamento della concentrazione nel tempo e nello spazio nel dominio illimitato a seguito di una condizione
iniziale a gradino. U=.025 m/s, c0=1 kg/m3, D=2.5m2/s
Nella figura 6b l’effetto del trasporto si manifesta in una traslazione del flesso della concentrazione
con velocità costante U. Nel punto di flesso la concentrazione vale sempre metà del valore iniziale
c0. Si noti inoltre come l’effetto della diffusione consista nella progressiva regolarizzazione del
gradiente iniziale di concentrazione (singolare in x=0), e tale da portare, per t→∞, alla
concentrazione uniforme, pari alla metà del valore iniziale c0.
1.2
Dominio illimitato con concentrazione di sostanza immessa in un punto
e costante rispetto al tempo.
Si consideri, per semplicità, l’equazione (8) con termine convettivo nullo. L’immissione di sostanza
avvenga in x=0. Le condizioni iniziali e al contorno siano date da:
c( x ,0 ) = 0
c(0 ,t ) = c0 , t > 0
(63)
Si può cercare una soluzione nella forma autosimile: c( x ,t ) = c0 f (η ), η =
x
.
Dt
Di conseguenza l’equazione (8) assume la forma:
d 2 f η df
+
=0
dη 2 2 dη
(64)
il cui integrale generale è dato dalla:
η
f = a1 + a 2 erf
2
(65)
Le costanti di integrazione si ottengono imponendo la condizione f(0)=1 e osservando che
necessariamente, al tendere di |η|→∞, la funzione f deve tendere a zero. f ha pertanto forma
simmetrica rispetto al punto di immissione x=0. Di conseguenza, ricordando che lim erf (η ) = 1 , si
η →∞
ha a1 = 1, a 2 = −1 e pertanto:
122
x
η
f = 1 − erf , c = c0 1 − erf
2
2 Dt
(66)
Figura 7. Andamento della concentrazione nel tempo e nello spazio nel dominio illimitato a seguito di una immissione
di sostanza costante nel tempo in x=0. U=.0 m/s, c0=1 kg/m3, D=2.5m2/s
In figura 7 si riportano gli andamenti spaziali della concentrazione, con parametro il tempo. Si vede
che al crescere del tempo l’effetto della diffusione tende a far assumere alla c un andamento
costante rispetto alla x e pari al valore della concentrazione immesso in x=0.
Se la concentrazione c0 immessa in x=0 è funzione del tempo, si deve considerare il fatto che tra
dc
l’istante τ e τ +dτ , in x=0 viene immesso un incremento di concentrazione pari a dc0 = 0 dτ . A
dτ
dc
x
,τ < t . La soluzione
tale incremento corrisponde la soluzione: dc = 0 dτ 1 − erf
2 D(t − τ )
dτ
generale la si ottiene sfruttando il principio di sovrapposizione degli effetti e sommando tutti gli
incrementi avuti negli istanti precedenti l’istante attuale t. In particolare, se fino all’istante iniziale t0
la concentrazione è ovunque nulla, l’espressione della concentrazione viene data dalla:
t
dc0
dτ
t0
c ( x ,t ) = ∫
x
1 − erf
dτ
2 D (t − τ )
(67)
Le immissioni di sostanza di solito si considerano in termini di massa piuttosto che di
concentrazione: ossia si considera in un punto specifico l’immissione di una portata in massa M& ,
eventualmente variabile nel tempo. In tal caso si deve considerare il fatto che tra l’istante τ e τ +dτ,
in x= x0 (x0 =0, per semplicità) viene immesso un incremento di massa pari a dM = M& dτ . A tale
x2
−
M&
4 D (t −τ )
e
dτ , τ < t .
incremento corrisponde l’incremento di concentrazione: dc =
4πD(t − τ )
Sovrapponendo tali soluzioni per tutti gli istanti precedenti t e considerando il caso in cui fino
all’istante iniziale t0 la portata in massa è ovunque nulla, si ha:
123
t
c ( x ,t ) = ∫
t0
M&
4πD(t − τ )
e
−
x2
4 D (t −τ )
dτ
(68)
Figura 8. Concentrazione imposta in x=0, avente legge: c(0,t)= c0+c0 sin(2πt/T). U=.0 m/s, c0=1 kg/m3, D=4m2/s, T=4s
In figura 8 è rappresentato l’andamento spaziale, con parametro il tempo, della soluzione (67), per
una concentrazione che varia sinusoidalmente nel tempo attorno al valor medio c0, a partire
dall’istante t0=0, con periodo T. E’ interessante notare che tutte le curve raggiungono un valore di
concentrazione inferiore al 50%del valore medio c0 in corrispondenza di una ascissa ξ il cui valore
è stimabile con la: ξ = k DT (k=1.1) Nel caso illustrato D=4, T=4, dunque ξ = 4.4 .
1.3
Domini limitati da pareti.
Torniamo ora alla equazione (8), che, a seguito della trasformazione di variabili, assume la forma
(11). Supponiamo di rilasciare in x=0 un impulso di concentrazione. Si vuole ora tener conto del
fatto che in x=-L è posta una parete che non permette la diffusione di sostanza. La presenza della
parete si può schematizzare aggiungendo la condizione al contorno:
∂c
q = Uc − D
=0
∂x x = − L
(69)
ossia di assenza di flusso diffusivo e convettivo di sostanza in corrispondenza della parete. Un
modo semplice ed efficace di ottenere la soluzione che tenga conto della presenza del contorno è
dato dalla applicazione del metodo delle immagini. Tale metodo consiste nel rimuovere la parete e
imporre la presenza, in posizione speculare al contorno, di una sorgente di sostanza di intensità pari
a quella della sorgente reale (figura 9). L’effetto del trasporto deve essere tenuto in conto invece
assegnando alla parte di dominio al di là della parete una velocità U uguale in modulo e direzione e
opposta in verso a quella del dominio reale. In pratica quindi, sovrapponendo le soluzioni dovute
alle sorgenti impulsive reale e immagine si ha:
( x + 2 L + ut )
− ( x −ut )
−
e 4 Dt + e 4 Dt
c ( x ,t ) =
2 πDt
1
2
2
(70)
124
Parete
c
-U
U
Sorgente immagine
x
-2L
-L
Sorgente reale
Figura 9. Schema di applicazione del metodo delle immagini.
In questo caso (figure 10a,b,c) si genera un accumulo di sostanza dovuto alla diffusione e alla
presenza della parete. Tale accumulo è però controbilanciato dall’effetto del trasporto: si nota
infatti, nel caso di velocità di trasporto non nulla, un valore di concentrazione alla parete diverso
rispetto a quello che si avrebbe in assenza di trasporto: è maggiore nel caso in cui la velocità di
trasporto sia diretta verso la parete, inferiore nel caso opposto. Il trasporto infatti favorisce o
sfavorisce l’accumulo di sostanza alla parete.
Nel caso in cui sia presente anche una seconda parete, l’applicazione del metodo delle immagini
diviene più complicata. Si supponga infatti che, in assenza di velocità di trasporto per semplicità, sia
presente una parete in x=L. L’intuizione ci porta a posizionare una sorgente immagine in x=2L.
D’altra parte questa sorgente immagine, unitamente a quella già presente in x=-2L, genera dei flussi
di sostanza non nulli, rispettivamente in x=-L, x=L. Di conseguenza risulta necessario posizionare
un’altra coppia di sorgenti immagine in x=-4L, x=4L. Il processo si ripete all’infinito, esattamente a
quanto accade alle immagini riflesse da una coppia di specchi. La soluzione si pone pertanto in
forma di serie:
c ( x ,t ) =
1
2 πDt
∞
∑e
−
( x + 2 kL )2
(71)
4 Dt
k = −∞
125
Figura 10a (in alto) Effetto della presenza di una parete in x=-L e trasporto positivo.
Figura 10b (al centro) Effetto della presenza di una parete in x=-L e trasporto negativo.
Figura 10c (in basso) Effetto della presenza di una parete in x=-L e trasporto nullo.
1.4
La soluzione fondamentale in 3 dimensioni.
Si consideri l’equazione (1), scritta esplicitando gli operatori differenziali, nel caso di coefficienti di
diffusività e componenti delle velocità della corrente costanti:
∂c
∂c
∂c
∂c
∂ 2c
∂ 2c
∂ 2c
+ u + v + w = Dx 2 + D y 2 + Dz 2
∂t
∂x
∂y
∂z
∂x
∂y
∂z
(72)
nel dominio spaziale tridimensionale illimitato, con condizione iniziale: c( x , y , z ,0 ) = f ( x , y , z ) .
Consideriamo innanzitutto la trasformazione di variabili ξ = x − ut ,η = y − vt ,ζ = z − wt , grazie alla
quale la (72) si trasforma nella:
∂c
∂ 2c
∂ 2c
∂ 2c
= Dx 2 + D y
+ Dz
∂t
∂ξ
∂η 2
∂ζ 2
(73)
126
Successivamente si ponga la soluzione nella forma:
c(ξ ,η ,ζ ,t ) = C1 (ξ ,t )C 2 (η ,t )C 3 (ζ ,t )
(74)
in virtù della quale la (73) diviene:
∂C3
∂C
∂C2
∂ 2 C3
∂ 2C1
∂ 2C2
=0
+
−
+
−
C2C3 1 − Dx
C
C
D
C
C
D
1 3
1 2
y
z
∂ξ 2
∂η 2
∂ζ 2
∂t
∂t
∂t
(75)
grazie alla separazione delle variabili spaziali operata tramite la posizione (74) si è in grado di
“spezzare” l’equazione (75) nelle tre equazioni:
∂C1
∂ 2C1
D
=0
−
x
2
ξ
t
∂
∂
∂ 2C2
∂C2
D
=0
−
y
2
η
t
∂
∂
∂C
∂ 2C3
=0
3 − Dz
∂t
∂ζ 2
(76)
Le quali possono essere risolte seguendo la procedura precedentemente illustrata. Si ottiene
c(ξ ,η ,ζ ,t ) =
(4πt )
32
1
Dx D y Dz
+ ∞+ ∞+ ∞
∫ ∫ ∫ f (ξ' ,η' ,ζ ' )e
−
(ξ −ξ ' )2 − (η −η ' )2 − (ζ −ζ ' )2
4 Dx t
4 Dyt
4 Dz t
dξ ' dη' dζ '
(77)
− ∞− ∞− ∞
assegnando la funzione f, ossia la concentrazione nell’istante iniziale, si ottiene la soluzione
particolare cercata. Nel caso in cui la f debba rappresentare una massa M rilasciata istantaneamente
nell’origine ( f (ξ ' ,η' ,ζ ' ) = Mδ (ξ ' ,η' ,ζ ' ) ) la soluzione (77) diviene:
ξ2
η2
ζ2
−
−
−
M
4 Dx t 4 D y t 4 Dz t
c(ξ ,η ,ζ ,t ) =
e
(4πt )3 2 Dx Dy Dz
(78)
che può essere espressa in funzione delle variabili fisiche:
−
M
c ( x , y , z ,t ) =
e
(4πt )3 2 Dx Dy Dz
( x −ut )2 − ( y − vt )2 − ( z − wt )2
4 Dx t
4 Dyt
4 Dz t
(79)
La soluzione (79) è alla base di molte soluzioni corrispondenti a condizioni al contorno più
complesse e dovute ad esempio alla presenza di pareti.
127
Capitolo VII. Trasporto e diffusione di sostanze negli alvei
fluviali.
Introduzione.
Il trasporto e la diffusione di sostanze negli alvei fluviali è caratterizzata da tre fasi successive.
Durante la prima fase (figura 1) la sostanza, a partire dal punto d’immissione A, viene
gradualmente diffusa sulla profondità della sezione trasversale. Durante la seconda fase, a partire
dal punto B, la sostanza, completamente diffusa rispetto alla profondità della sezione, inizia a
diffondere sulla larghezza della sezione. Infine durante la terza fase, a partire dal punto C, la
sostanza, completamente diffusa rispetto alla larghezza della sezione, viene diffusa esclusivamente
in direzione longitudinale.
y
Campo vicino
Campo intermedio
C
B
A
x
Campo lontano
Fase 1
Fase 2
Fase 3
Figura 1. Rappresentazione schematica dei principali processi di trasporto-diffusione in una corrente fluviale.
La distinzione nelle tre fasi è ovviamente uno schematismo, utile per poter distinguere nel processo
generale gli aspetti peculiari predominanti in un caso o nell’altro. Infatti nella prima fase, detta
anche zona del campo vicino, non sembra ragionevole il poter considerare le medie delle grandezze
in gioco rispetto alla coordinata verticale, cosa che invece appare ragionevole nella seconda fase o
zona del campo intermedio, ottenendo una riduzione delle variabili indipendenti spaziali. Nella
terza fase o zona di campo lontano sarà addirittura possibile mediare le grandezze in gioco
sull’intera sezione dell’alveo, con conseguente ulteriore riduzione delle variabili indipendenti
spaziali. Nel seguito verranno esaminati i processi di trasporto-diffusione negli alvei fluviali, con
particolare riguardo alle tre zone.
Il problema del trasporto-diffusione negli shear flows. Definizione del
coefficiente di dispersione. Il caso delle correnti in pressione e delle
correnti a superficie libera.
Propedeutico all’esame dei processi di trasporto-diffusione o più sinteticamente di dispersione negli
alvei fluviali, è la considerazione di detti processi negli shear flows, ossia nei flussi caratterizzati da
una componente di velocità prevalente, dotata di gradiente nella direzione ad essa perpendicolare.
In pratica tutti i flussi in prossimità di pareti piane sono shear flows. Le correnti in condotta e a
superficie libera sono pertanto a buon diritto da considerarsi shear flows su pareti scabre.
Il fatto importante da considerare negli shear flows consiste nell’effetto combinato del trasporto di
sostanza, operato dalla velocità con gradiente in direzione perpendicolare al moto, e della diffusione
trasversale: il risultato consiste in una diffusione della sostanza in direzione longitudinale con
128
coefficiente di diffusività efficace o di dispersione molto maggiore della diffusività molecolare
originaria. Infatti la variazione della velocità rispetto alla coordinata trasversale fa sì che due
particelle di sostanza, originariamente vicine, tendano ad allontanarsi più sensibilmente di quanto
non farebbero se assoggettate esclusivamente al processo diffusivo molecolare.
Contemporaneamente la diffusione molecolare fa sì che in un tempo sufficientemente lungo, ogni
particella di sostanza abbia visitato l’intera sezione interessata dal moto, sperimentando così
l’azione del profilo di velocità in ogni punto della sezione.
Una stima del coefficiente di dispersione in uno shear flow in moto laminare si ottiene agevolmente
se si osserva che il processo di dispersione è sostanzialmente analogo ad un processo di diffusione
turbolenta caratterizzato da una scala di velocità pari ad U (velocità media sulla sezione) e da una
scala temporale lagrangiana TL, avente per ordine di grandezza il tempo necessario per la particella
L2
a visitare l’intera sezione occupata dal flusso di dimensione caratteristica trasversale L: TL = . D
D
è chiaramente la diffusività molecolare. Si ha:
L2
K ≈ U TL = U
D
2
2
(1)
Considerando una velocità di 1 m/s in olio e assimilando D alla viscosità cinematica di questo (10-3
m2s-1), posto L=1 m, risulta un coefficiente di dispersione di ben 103 m2s-1, dunque maggiore di
molti ordini di grandezza rispetto all’originario valore di D.
Una quantificazione più rigorosa del coefficiente di dispersione può essere fatta ricorrendo alla
analisi fatta da Taylor, per le correnti in pressione, successivamente estesa da Elder alle correnti a
superficie libera.
Si consideri (figura 2) una corrente in pressione all’interno di una condotta circolare di raggio R.
r
u(r)
R
x
Figura 2. Schema della dispersione in una condotta in pressione.
Sia u(r) il profilo della velocità media in funzione del raggio. Sia inoltre U la velocità media sulla
sezione, ossia la quantità:
U=
1
πR 2
2π R
∫ ∫ u(r )rdrdϕ
(2)
0 0
La componente di velocità media lungo l’asse è l’unica componente di velocità non nulla e, per
ovvie ragioni di simmetria assiale, dipende solo dalla coordinata radiale. Di conseguenza
l’equazione del trasporto diffusione per la concentrazione c della sostanza, assume la forma:
129
∂c
∂c ∂
∂c 1 ∂
∂c
+ u (r ) = D xx +
rDrr
∂t
∂x ∂x
∂x r ∂r
∂r
(3)
∂c
= 0 esprimente la condizione di flusso nullo
∂r r = R
in prossimità delle pareti della condotta. I coefficienti Dxx , Drr sono i coefficienti di diffusività nelle
direzioni x, r. Si operi ora la seguente trasformazione di coordinate: ξ = x − Ut , r = r ,t = t ,
consistente nel porsi in un sistema di riferimento traslante con la velocità media sulla sezione.
L’equazione (3) assume la forma:
Si può assumere l’ovvia condizione al contorno:
∂c
∂c
∂
∂c 1 ∂
∂c
D xx
+
+ (u (r ) − U )
=
rDrr
∂t
∂ξ ∂ξ
∂ξ r ∂r
∂r
(4)
Si badi bene che il termine u (r ) − U rappresenta lo scarto tra la velocità media locale e la velocità
media sulla sezione. Trascurando ora il primo termine diffusivo a secondo membro della (4), si
ottiene:
∂c
∂c
∂c 1 ∂
+ (u (r ) − U )
=
rDrr
∂t
∂ξ r ∂r
∂r
(5)
Tale approssimazione è giustificata dal fatto che il processo diffusivo longitudinale è meno
importante di quello trasversale se considerato su scale di lunghezza di ordine di grandezza pari ad
R. Taylor ipotizzò che una soluzione della (5) potesse essere posta nella forma:
c=C +
∂C
f (r )
∂ξ
(6)
Essendo C la concentrazione media sulla sezione e
come: C =
1
πR 2
2π R
∂C
f (r ) lo scarto rispetto ad essa. C è definita
∂ξ
∫ ∫ crdrdϕ , mentre la funzione f soddisfa la condizione:
0 0
Inoltre Taylor assunse che C = C (ξ ,t ), C >>
∂
∂C
∂
C +
f (r ) + (u (r ) − U )
∂t
∂ξ
∂ξ
1
πR 2
2π R
∫ ∫ f (r )rdrdϕ = 0 .
0 0
∂C
. Sostituendo la (6) nella (5), si ottiene:
∂ξ
1 ∂
∂C
∂
∂C
rDrr C +
C +
(
)
f (r ) =
f
r
ξ
ξ
∂
r
∂
r
∂
r
∂
(7)
che si semplifica facilmente nella:
∂f (r ) ∂C
∂C 1 ∂
∂C
=
+ (u (r ) − U )
rDrr
∂r ∂ξ
∂ξ r ∂r
∂t
(8)
e ancora, trascurando il termine della derivata locale rispetto al tempo, si ottiene la:
130
d
df (r )
rDrr
r dr
dr
(u (r ) − U ) = 1
(9)
ossia una equazione differenziale ordinaria, per la determinazione della funzione f, descrivente la
struttura trasversale della concentrazione. Affinché la (9) sia utile, dovranno essere assegnati il
profilo della velocità media e del coefficiente di diffusività Drr . In ogni caso dalla (9) si ottiene la
seguente definizione per la f:
f (r ) = k − F (r )
1 R
dr
(
)
(
(
)
)
F
r
u
r
'
U
r
'
dr
'
=
−
∫ rDrr ∫r
(10)
con k costante di integrazione, che si ottiene facilmente imponendo che la media della F sulla
2π R
1
sezione sia nulla: k = 2 ∫ ∫ F (r )rdrdϕ .
πR 0 0
A questo punto si dispone della struttura trasversale della concentrazione, ma non si sa ancora nulla
della funzione C . Per determinare quest’ultima è opportuno operare la media sulla sezione della
equazione (4), in cui, con un passaggio un po’ “ardito”, si riammette la presenza del primo termine
a primo membro. E’ opportuno considerare separatamente la media del primo e del secondo
membro:
1 2π R ∂
∂C
∂
∂C
∂C
∂ 2C
(
)
(
(
)
)
(
)
+
+
−
+
=
−
C
f
r
u
r
U
C
f
r
rdrd
K
ϕ
πR 2 ∫0 ∫0 ∂t
∂ξ
∂ξ
∂ξ
∂t
∂ξ 2
2π R
1
K = − πR 2 ∫ ∫ (u (r ) − U ) f (r )rdrdϕ
0 0
R
1 R 2π ∂
∂c 1 ∂
2
∂c
∂ 2C
∂c
∂ 2C
2 ∫ ∫ D xx
+
rD
rdrd
D
rD
D
ϕ
=
+
=
rr
xx
rr
xx
πR
∂ξ
∂ξ r ∂r
∂r
∂r 0
∂ξ 2 R 2
∂ξ 2
0 0
(11)
Si ha infine, l’equazione per la determinazione della C :
(
)
∂C
∂ 2C
= K + D xx
∂t
∂ξ 2
(12)
Il coefficiente K è per l’appunto il coefficiente di dispersione. Il coefficiente D xx è il coefficiente di
diffusività longitudinale mediato sulla sezione: si vedrà più avanti come l’ordine di grandezza di
questo sia minore del coefficiente K di dispersione. La definizione completa del coefficiente K in
funzione della distribuzione di velocità e della diffusività trasversale, la si ottiene sostituendo
l’espressione (10) della f nella seconda delle (11):
1
K=
πR 2
1
(
(
)
)
u
r
U
−
∫0 ∫0
∫ rDrr
2π R
R
r
∫ (u(r' ) − U )r' dr' dr rdrdϕ
131
(13)
E’ interessante notare che la definizione del coefficiente di dispersione discende dalla operazione di
media sulla sezione della equazione(4). In particolare il coefficiente K deriva dal termine
convettivo, pur contenendo nel suo interno grandezze che ci ricordano la diffusione trasversale: il
profilo di velocità e il coefficiente di diffusività Drr . In tal senso è un vero e proprio coefficiente di
dispersione, in quanto sintetizza gli effetti di trasporto (convettivi) con quelli dovuti alla diffusione.
E’ interessante osservare cosa accada nel caso di moto laminare e moto turbolento. Nei due casi si
ha rispettivamente:
Drr = D
2
u (r ) = U + U 1 − 2 r
R 2
r
r
Drr = κu* R 1 −
R R
u*
r
u (r ) = U + 3.75u* + Log 1 −
κ
R
(14)
Con ovvio significato dei simboli. Si è fatto uso della cosiddetta analogia di Reynolds per definire il
coefficiente di diffusività turbolenta della sostanza, consistente nell’adottare per quest’ultimo la
stessa definizione della viscosità turbolenta, stante il fatto che tanto quest’ultima che il coefficiente
di diffusività turbolenta hanno le medesime dimensioni.
I profili di velocità adottati corrispondono rispettiva,mente al profilo parabolico del moto laminare e
ad un profilo di velocità interpolato da Taylor su dati sperimentali da lui stesso ottenuti.
Il calcolo del coefficiente di dispersione conduce rispettivamente ai seguenti risultati:
U 2 R 2 U 2 D U 2ℜ
=
=
K =
48D
192
48
K = 5.1u R = 10.2u ℜ
*
*
(15)
D
il raggio idraulico per una condotta a sezione circolare di diametro D.
4
Il valore del coefficiente D xx può essere stimato integrando sulla sezione il valore della diffusività
Essendo ℜ =
Dxx . Nel moto laminare: Dxx = D ⇒ Dxx = D . Nel moto turbolento Taylor adottò la seguente
ipotesi: Dxx = Drr , di conseguenza il valore mediato sulla sezione è dato da:
κu* R 2π R r r
Dxx =
1 − drdϕ = 0.067u* R
πR 2 ∫0 ∫0 R R
(16)
Avendo usato il valore κ=0.4 per la costante di Von Karman. In definitiva il processo diffusivodispersivo, nell’ambito delle ipotesi poste, può essere completamente caratterizzato. In particolare,
assegnate le condizioni iniziali e al contorno, può essere risolta l’equazione (12) per la
determinazione della C e di conseguenza può essere completamente determinata la soluzione nella
forma di Taylor (6).
Il caso delle correnti a superficie libera può essere esaminato in modo del tutto analogo partendo
dalla equazione:
132
∂c
∂c ∂
∂c ∂
∂c
+ u ( z ) = Dxx + Dzz
∂t
∂x ∂x
∂x ∂z
∂z
(17)
essendo il significato delle coordinate illustrato in figura 3.
Si ha cioè a che fare con una sezione rettangolare larghissima ( ℜ = h ), in modo da poter assumere
il moto bidimensionale, descritto dalle coordinate longitudinale e verticale:
z
b
U
h
x
Figura 3. Schema della corrente a superficie libera con sezione rettangolare larghissima
Assumendo la trasformazione di coordinate: ξ = x − Ut , r = r ,t = t , l’equazione (17) assume la
forma:
∂c
∂c
∂c
∂
∂c ∂
Dxx
+ Dzz
=
+ (u ( z ) − U )
∂t
∂ξ ∂ξ
∂ξ ∂z
∂z
(18)
La soluzione della quale può essere assunta nella forma di Taylor:
c=C +
∂C
f (z )
∂ξ
(19)
Sostituendo quest’ultima nella (18) e trascurando la derivata temporale si ottiene l’equazione:
(u (z ) − U ) =
d
df ( z )
Dzz
dz
dz
(20)
che può essere risolta tenendo conto sia della condizione di flusso nullo di sostanza per z = 0 in
corrispondenza del fondo dell’alveo:
df ( z )
=0
dz z =0
(21)
sia della condizione che tiene conto del fatto che la media della f sulla verticale è nulla:
133
h
∫ f (z )dz = 0
(22)
0
Si ottiene pertanto:
1
f ( z ) = ∫
D zz
z
∫ (u(ζ ) − U )dζ dz + C
(23)
f
0
h
1 1
essendo C f = − ∫ ∫
hb 0 D zz
z
0
∫ (u(ζ ) − U )dζ dz dz . La definizione del coefficiente di dispersione
risulta pertanto la:
h
K =−
1
(u (z ) − U ) f (z )dz
bh ∫0
(24)
Assumendo i seguenti profili di diffusività turbolenta D zz e di velocità:
z
D zz = κu* z 1 − h
u ( z ) = U + u* 1 + Log z
κ
h
(25)
il calcolo porta alla formula:
K = 0.404
u* h
κ3
= 6.3u* h
(26)
Trasporto e diffusione di sostanze nel campo vicino
I processi di dispersione di sostanza nel campo vicino si realizzano per effetto della diffusione
turbolenta e sono prevalentemente influenzati dalla dimensione verticale della corrente. Nella fase
di campo vicino infatti si ipotizza che la dimensione caratteristica della nuvola di sostanza sia
piccola rispetto alle dimensioni trasversali e longitudinali dell’alveo. In definitiva i processi di
dispersione nel campo vicino sono condizionati dalle sole distribuzioni verticali delle proprietà del
moto.
Per studiare i processi di dispersione nel campo vicino si usa l’equazione di trasporto-diffusione
corredata dalle opportune definizioni dei coefficienti di diffusività.
Poichè la scala spaziale lagrangiana:
∞
LL = ∫ R xx ( x + r )dr , R xx ( x + r ) =
0
u ( x )u ( x + r )
u (x )
(27)
2
che esprime la distanza oltre la quale la particella di sostanza perde memoria della sua velocità
iniziale, ha ordine di grandezza pari alla profondità della corrente, i processi diffusivi longitudinali e
trasversali non possono essere rappresentati nell’ambito del modello fickiano, con diffusività
indipendente dal tempo. Tuttavia, nella pratica ingegneristica, o i processi diffusivi nelle direzioni
134
longitudinale e trasversale vengono trascurati o tale limitazione viene ignorata e si applica lo
schema diffusivo con diffusività indipendente dal tempo a partire dall’istante di immissione della
sostanza.
Applicazione. Miscelamento verticale a valle di una sorgente trasversale
distribuita stazionaria.
Nel considerare i problemi di miscelamento nel campo vicino, possono essere trascurati i fenomeni
diffusivi nelle direzioni trasversale e longitudinale: le dimensioni caratteristiche in tali direzioni
infatti sono molto maggiori della dimensione caratteristica nella direzione verticale. Di conseguenza
i tempi di miscelamento sono sensibilmente diversi nelle tre direzioni.
Nelle ipotesi poste e trascurando il termine di derivata temporale della concentrazione, l’equazione
di trasporto diffusione assume la forma:
u
∂c ∂
∂c
= D zz
∂x ∂z
∂z
(28)
Si esamina dunque un caso di miscelamento stazionario in una corrente a superficie libera in moto
uniforme in alveo rettangolare larghissimo, di altezza h e velocità media U, ipotizzando che la fase
iniziata con l’apertura dello scarico, erogante una portata in massa M& , si sia rapidamente esaurita.
Si adotta un coefficiente di diffusività turbolenta Dzz costante e pari al valor medio della diffusività
h
turbolenta sulla coordinata verticale: D zz =
1
D zz e si identifica la velocità u con la velocità media
h ∫0
U.
In definitiva l’equazione (28) assume la forma:
∂c
∂ 2c
U
= D zz 2
∂x
∂z
(29)
e deve essere risolta nel dominio x ≥ 0, 0 ≤ z ≤ h con le condizioni iniziali e al contorno:
c(0, z ) =
∂c
=
∂z z =0
M&
δ (z − z 0 )
U
∂c
=0
∂z z = h
(30)
La prima condizione al contorno impone il fatto che la portata in massa viene immessa tutta
concentrata nel punto a quota z0 : di conseguenza la concentrazione sulla sezione è tutta nulla
fuorché nel punto posto a tale quota. Le altre due condizioni espresse sulla derivata della
concentrazione rispetto alla coordinata verticale esprimono la condizione di flusso di sostanza nullo
sul fondo e sulla superficie libera.
Poiché l’equazione (29) è a coefficienti costanti ammette la soluzione esatta:
c( x , z ) =
M&
x
U π D zz
U
−
e
( z − z0 )2
x
4 Dzz
U
=
M&
π D zzUx
−
e
( z − z0 )2
4 Dzz
x
U
135
(31)
soddisfacente la prima condizione al contorno (30) ma non la seconda e la terza: la soluzione (31)
vale ignorando la presenza del fondo e della superficie libera. Per tenere conto del fondo e della
superficie libera è sufficiente assimilare tali contorni a delle pareti impermeabili e applicare il
metodo delle immagini. A tal proposito, facendo riferimento alla figura 4:
x
U
h
z
-(2h-z0)
-z0
z0
-(2h+z0)
2h-z0
2h+z0
Figura 4. La serie di sorgenti immagine
si vede che sono necessarie due serie infinite di immagini ottenute bilanciando ciascuna sorgente
con due speculari, di pari intensità, poste rispettivamente nelle coordinate:
z +k = 2kh + z0 , z −k = 2kh − z0 , k = 0,±1,±2,K
(32)
Si ottiene finalmente la soluzione:
( z − ( 2 kh + z0 ))
− ( z −(2 kh − z0 ))
−
x
x
&
4
4 Dzz
D
M
zz
U
U
c( x , z ) =
e
e
+
∑
2 π DzzUx k = −∞
2
∞
2
(33)
Che viene riportata in figura 5, al variare della posizione z0 della sorgente. Sono rappresentati i casi:
a-z0=0, b-z0=0.25 h, c-z0=0.5 h, d-z0=0.75 h, e-z0=h.
136
Figura 5. Rappresentazione della superficie c(x,y) al variare della posizione del punto di immissione
Le coordinate riportate sugli assi orizzontali x,z sono adimensionalizzate rispetto ai parametri
Uh 2
, h , mentre la concentrazione, riportata sull’asse verticale, è adimensionalizzata rispetto al
Dzz
M&
. La distribuzione della concentrazione viene ben riprodotta usando pochi termini nella
valore
Uh
serie (33), nelle zone di forte disomogeneità, mentre occorrono molti termini per rappresentare la
zona con concentrazione omogenea. E’ importante notare come, a partire da una certa ascissa x z la
concentrazione di sostanza divenga praticamente omogenea e il processo di dispersione rispetto alla
verticale si sia compiuto. Tale ascissa può essere definita come l’ascissa in corrispondenza della
quale il rapporto tra la concentrazione minima e quella massima sulla sezione diviene almeno pari a
0.98, e varia al variare della posizione del punto di immissione. Esaminando i diversi casi riportati
in figura 5, si nota come la posizione di immissione posta in mezzeria della sezione del canale
consenta di arrivare al completo mescolamento sulla verticale in corrispondenza ad una ascissa che
è la minima rispetto agli altri casi. L’analisi della soluzione (33) permette di stabilire che:
0.134 ≤ x z ≤ 0.536 ⇒ 0.134
Uh 2
Uh 2
≤ L z ≤ 0.536
D zz
D zz
(34)
competendo i valori minimi e massimi rispettivamente ai casi z0=0.5 h, z0=h e z0=0. Dunque la
formula (34), permette di stabilire, in funzione della posizione del punto di immissione, la distanza
dal punto di immissione Lz , misurata sull’asse dell’alveo, oltre la quale si ha il completo
mescolamento verticale, nell’ipotesi di coefficiente di diffusività turbolenta e velocità pari alla
media sulla sezione rispettivamente della diffusività turbolenta e della velocità. In particolare
usando per la media del coefficiente di diffusività la media sulla sezione della corrente della
espressione (25), la (34) diviene:
137
2
U
U
h ≤ Lz ≤ 8 h
u*
u*
(36)
La (35) permette di effettuare una stima immediata della distanza di mescolamento verticale Lz ,
noto che nelle correnti a superficie libera la velocità d’attrito è stimabile con la u* = gi f h ,
essendo i f la pendenza del fondo. Il calcolo porta in genere a valori della distanza di mescolamento
verticale aventi ordine di grandezza da 10 a 100 volte la profondità della corrente.
L’analisi fin qui condotta è stata effettuata nelle ipotesi di coefficienti u e Dzz costanti e pari
rispettivamente alla velocità U e al coefficiente di diffusività turbolenta media D zz mediati sulla
sezione. Adottando per u e Dzz delle distribuzioni lungo la verticale (ad esempio i profili (25)) i
risultati non cambiano in modo apprezzabile, salvo il fatto che la stima della distanza di
mescolamento verticale Lz , nel caso di posizionamento della sorgente di immissione a quota
diversa da z0=0.5 h, è inferiore fino al 15% di quella operata dal modello a coefficienti costanti ed
espressa dalla (35).
Trasporto e diffusione di sostanze nel campo intermedio.
1. Il modello di riferimento
Come già visto in precedenza, nella maggior parte dei corsi d’acqua, il mescolamento verticale si
realizza ben prima che si completi il mescolamento trasversale. Tale fatto giustifica l’opportunità di
analizzare il processo di mescolamento nel campo intermedio ignorando le variazioni verticali delle
grandezze di campo e considerando le rispettive equazioni mediate sulla profondità.
A tal proposito è interessante considerare il processo di media sulla verticale delle equazioni di
bilancio della massa, della quantità di moto e della concentrazione.
In figura 6 viene riportato lo schema cui si farà ferimento nel corso del capitolo. Vi si illustra un
alveo in cui la profondità h, riferita al fondo e misurata lungo la verticale, è piccola rispetto ad una
dimensione caratteristica l dei moti orizzontali.
z
l
y
h
zf
x
Figura 6. Lo schema di riferimento
Nella figura 6, la dimensione l è definita come l’estensione spaziale lungo la quale si hanno
variazioni significative della superficie libera: può essere definita come la dimensione della
138
h
<< 1 , si è in
l
condizioni di acque basse (shallow water) e, in tal caso, è lecito ritenere predominanti i moti in
direzione orizzontale rispetto a quelli in direzione verticale. Per tenere conto di ciò nelle equazioni
del moto, si considerino le tre componenti della equazione RANSE e l’equazione di continuità:
lunghezza d‘onda delle perturbazioni della superficie libera. In ogni caso, se
∂u ∂u 2 ∂uv ∂uw
∂ ∂u
∂ ∂u
1 ∂p ∂ ∂u
2
+
+
=−
+ ν
+ (u' ) + ν
+ u' v' + ν
+ u' w'
+
ρ ∂x ∂x ∂x
∂y
∂z
∂y ∂y
∂z ∂z
∂t ∂x
∂v ∂uv ∂v 2 ∂vw
∂ ∂v
1 ∂p ∂ ∂v
∂ ∂v
2
+
+
+
=−
+ ν
+ u' v' + ν
+ (v' ) + ν
+ u' w'
ρ ∂y ∂x ∂x
∂y
∂z
∂t ∂x
∂y ∂y
∂z ∂z
(36)
2
∂ ∂w
∂w
∂ ∂w
1 ∂p
∂w ∂uw ∂vw ∂w
∂
2
∂t + ∂x + ∂y + ∂z = − ρ ∂z − g + ∂x ν ∂x + u' w' + ∂y ν ∂y + v' w' + ∂z ν ∂z + (w' )
∂u ∂v ∂w
=0
+ +
∂x ∂y ∂z
Se nella terza equazione si considerano trascurabili tutti i termini contenenti la componente di
velocità media w e di agitazione w’, si ottiene che la distribuzione di pressione all’interno del corpo
idrico sarà necessariamente idrostatica:
−
1 ∂p
−g =0 ⇒
ρ ∂z
p = ρg (z f + h − z )
(37)
L’ipotesi di trascurare la componente w è fondamentale, perché permette di ottenere la distribuzione
analitica della pressione. Si consideri ora l’equazione di continuità e la si integri rispetto a z:
z f +h
∫
zf
∂u ∂v ∂w
∂
+
dz =
+
∂x
∂x ∂y ∂z
w z=z
f
+h
− w z=z
f
z f +h
∫ udz +
zf
∂
∂x
z f +h
∫ vdz +
zf
∂ (z + h )
∂z f
f
− u
−u
∂x
∂x
z= z f +h
z=z f
∂ (z + h )
∂z f
f
− v
−v
∂y
∂y
z= z f +h
z=z f
=0
(38)
Si è applicata la regola di Leibniz13, per “portare fuori dall’integrale” il simbolo di derivazione
parziale spaziale. I termini nella seconda riga della (38) fanno riferimento a grandezze calcolate
sulla superficie libera e sul fondo. Tali termini devono essere messi in relazione alle variazioni
spazio-temporali del fondo e della superficie libera, tramite opportune condizioni di carattere
cinematico. Infatti la superficie libera e il fondo del corpo idrico possono essere descritti
matematicamente dalle espressioni:
η (x , y , z ,t ) = z − z f ( x , y ) − h(x , y ,t ) = 0
ζ (x , y , z ) = z − z f (x , y ) = 0
(39)
13
La regola di Leibniz permette il calcolo della derivata di un integrale definito in cui gli estremi di integrazioni siano
funzioni della variabile indipendente:
∂
∂x
z f ( x , y )+ h ( x , y ,t )
z f ( x , y )+ h ( x , y ,t )
z f x ,y
z f x ,y )
∫( u)(x , y , z ,t )dz =
∫
(
∂ (z f + h )
∂z f
∂u
dz +
u z +h −
u
f
∂x
∂x
∂x z f
139
Considerando le derivate totali rispetto al tempo delle (39), si ottiene:
dη
∂ (z f + h )
∂ (z f + h ) ∂h
= w − u
−v
−
=0
∂
∂
∂t z = z + h
dt
x
y
f
∂z f
∂z f
dζ
w
u
=
−
v
−
=0
dt
x
∂
y
∂
z=z f
(40)
dalle quali si possono dedurre i valori della componente verticale di velocità w sul fondo e sulla
superficie libera:
∂ (z f + h )
∂ (z f + h )
∂h
+v
+u
w z = z f + h =
∂y
∂x
∂t
z=z f +h
z= z f +h
∂z f
∂z f
w
u
v
=
+
z=z f
∂x z = z
∂y z = z
f
f
(41)
Il fatto che non compare la derivata temporale del profilo del fondo z f è conseguenza del
considerare un fondo fisso. Nei problemi in cui si deve tener conto della variazione temporale del
fondo, causata dal trasporto di sedimenti, compare ovviamente anche un termine contenente la
derivata temporale del profilo di fondo. Sostituendo le (41) nella (38) si ottiene l’equazione di
continuità in caso di acque basse:
∂h ∂
+
∂t ∂x
z f +h
∂
∫z udz + ∂y
f
z f +h
∫ vdz = 0
(42)
zf
A primo membro della (42) compaiono gli integrali delle componenti di velocità u, v rispetto a z,
calcolati sulla profondità h. Il risultato di tali integrali può essere espresso come il valore medio
della rispettiva componente sulla profondità h per la profondità stessa:
∂h ∂ (Uh ) ∂ (Vh )
+
+
=0
∂t
∂x
∂y
(43)
U, V sono le medie delle rispettive componenti di velocità u, v rispetto a z, calcolate sulla profondità
h:
1
U ( x , y ,t ) =
h
z f +h
1
∫z udz , V (x , y ,t ) = h
f
z f +h
∫ vdz
(44)
zf
Non si devono confondere le medie U, V, che sono medie spaziali, con le medie alla Reynolds, che
sono temporali. In ogni caso, le medie U, V, sono calcolate a partire dalle u, v, che sono le
componenti di velocità media alla Reynolds. Si possono definire gli scarti U ' ,V ' rispetto alla media
spaziale semplicemente esprimendo la differenza tra la componente di velocità e la corrispondente
media spaziale:
140
U' = u − U , V' = v − V
(45)
Tali scarti ovviamente hanno media spaziale nulla. E’ necessario sottolineare la differenza tra gli
scarti (45) e le velocità fluttuanti. Entrambi infatti sono definiti allo stesso modo: come differenza
tra il valore locale e istantaneo e il valore medio. Nel caso però delle velocità fluttuanti, si tratta di
medie temporali, nel caso considerato nel presente capitolo si tratta di medie spaziali effettuate su
velocità alle quali è già stata applicata l’operazione di media temporale. Si integrino ora le prime
due equazioni (36), tenendo conto della distribuzione di pressione (37). Applicando ripetutamente la
regola di Leibniz e tenendo conto delle condizioni cinematiche (41), si ottengono le seguenti
equazioni:
∂
∂t
∂
∂t
z f +h
∂
∫z udz + ∂x
f
z f +h
∂
∫z vdz + ∂x
f
z f +h
∂
∫z u dz + ∂y
f
2
z f +h
∂
∫z uvdz + ∂y
f
z f +h
∫ uvdz = − g
zf
z f +h
∫v
2
dz = − g
zf
∂ (z f + h )
∂x
∂ (z f + h )
∂y
z f +h
∫
h+
zf
z f +h
h+
∫
∂Txx
dz +
∂x
z f +h
∂T yx
z f +h
∂x
zf
dz +
∫
zf
∫
zf
∂Txy
∂y
∂T yy
∂y
dz + Txz
dz + T yz
z= z f +h
z= z f +h
− Txz
− T yz
z=z f
z=z f
(46)
In cui, per semplicità di notazione, con Tij si intende lo sforzo totale, somma dello sforzo turbolento
e viscoso. Si noti che gli ultimi due termini a secondo membro delle (46) rappresentano
rispettivamente gli sforzi tangenziali totali esercitati sul fluido in corrispondenza del fondo e della
superficie libera. Sostituendo ora alle rispettive componenti di velocità la decomposizione (45), si
ottiene:
z f +h
z f +h
∂ (Uh ) ∂ U 2 h ∂ (UVh )
∂Txy
∂Txyd
∂ (z f + h )
∂Txxd
∂Txx
dz +
dz +
h+ ∫
+ ∫
+ Txz
= −g
+
+
∂x
∂y
∂y
∂x
∂y
∂x
∂x
∂t
zf
zf
z f +h
z f +h
∂T yyd
∂T yy
∂Txyd
∂T yx
∂ (z f + h )
∂ (Vh ) ∂ (UVh ) ∂ V 2 h
+ T yz
dz +
+ ∫
dz +
h+ ∫
∂t + ∂x + ∂y = − g
∂y
∂y
∂x
∂x
∂y
zf
zf
(47)
(
)
z= z f +h
( )
z= z f +h
− Txz
− T yz
z=z f
z=z f
A causa della presenza dei termini non lineari e della decomposizione (45), compaiono degli sforzi
aggiuntivi, detti sforzi dispersivi, definiti in base ai profili degli scarti di velocità:
∂Txxd
=−
∂x
z f +h
∫
zf
2
∂Txyd
∂ (U ' )
=−
dz ,
∂x
∂x
z f +h
∫
zf
∂Txyd
∂U ' V '
=−
dz ,
∂x
∂y
z f +h
∫
zf
∂T yyd
∂U ' V '
=−
dz ,
∂y
∂y
z f +h
∫
zf
∂ (V ' )
dz
∂y
2
(48)
In definitiva le equazioni (43) e (47) descrivono il comportamento dei moti in acque basse. La
descrizione del moto avviene in termini di superficie libera e componenti di velocità mediate sulla
profondità U, V. Le variabili dipendenti h, U, V sono funzioni di x, y, t. Per determinare, almeno in
linea teorica, le soluzioni delle equazioni (43) e (47) si devono conoscere: la forma del fondo, un
modello di turbolenza che permetta di esprimere la media sulla profondità degli sforzi turbolenti in
funzione del moto risolto, un modello di chiusura per gli forzi dispersivi (che metta cioè in
relazione gli scarti con la media spaziale della velocità) e delle relazioni per esprimere gli sforzi
tangenziali totali sul fondo e sulla superficie libera in funzione del moto risolto. Si noti che gli
sforzi tangenziali totali sul fondo e sulla superficie libera sono grandezze importanti: in particolare
il primo esprime l’azione resistente al moto esercitata dal fondo, mentre il secondo, solitamente
trascurato, può rappresentare l’azione del vento sulla superficie libera.
141
Per quanto riguarda gli sforzi Tij, trascurando il contributo viscoso e adottando un modello di
turbolenza basato sulla definizione di una viscosità turbolenta, si può porre:
z f +h
z f + h ∂T
∂Txy
∂ ∂U
∂ v xy ∂U ∂V
xx
dz = h
,
dz
h
v
+
=
∫
xx
∫
∂y 2 ∂y ∂x
∂x
∂x z f ∂y
z f ∂x
z f +h
z f +h
∂Tyy
∂Tyx
∂ ∂V
∂ v xy ∂U ∂V
∫ ∂x dz = h ∂x 2 ∂y + ∂x , ∫ ∂y dz = h ∂y v yy ∂y
zf
z f
(49)
Ossia gli sforzi turbolenti che appaiono nelle (49) si ritengono proporzionali al gradiente orizzontale
delle sole componenti medie spaziali, tramite i coefficienti di viscosità turbolenta νij, che devono
essere opportunamente valutati. Gli sforzi dispersivi (48), nell’ambito dell’uso pratico delle
equazioni di shallow water, vengono invece solitamente trascurati.
Nei problemi di trasporto e diffusione di sostanze nel campo intermedio, unitamente alle equazioni
delle acque basse (43), (47), si deve considerare l’equazione di trasporto e diffusione della
concentrazione di sostanza mediata sulla profondità. Integrando pertanto la forma generale di tale
equazione sulla profondità, applicando la regola di Leibniz e tenendo conto delle condizioni
cinematiche (41) si ha:
∂
∂t
h+ z f
∂
∫z cdz + ∂x
f
h+ z f
∂
∫z cudz + ∂y
f
h+ z f
h+ z f
zf
zf
∫ cvdz = ∫
∂
∂c
D x dz +
∂x
∂x
h+ z f
∫
zf
∂
∂c
∂c
∂c
D y dz + D z
− Dz
∂y
∂y
∂z z = h + z f
∂z z = z f
(50)
Si sono indicate con Dx , D y , Dz le diffusività turbolente della sostanza nelle tre direzioni spaziali,
∂c
∂c
e introducendo la
generalmente diverse. Inoltre ponendo: qcsl = Dz
, qcf = Dz
∂z z = z f
∂z z = h + z f
decomposizione c = C + C' ,u = U + U ' ,v = V + V ' , essendo C la concentrazione mediata sulla
profondità e C' lo scarto rispetto a tale valor medio, si ottiene:
∂Ch ∂CUh ∂CVh ∂
+
+
+
∂t
∂x
∂y
∂x
h+ z f
∂
∫z c' u' dz + ∂y
f
h+ z f
h+ z f
zf
zf
∫ c' v' dz = ∫
∂ ∂c
Dx dz +
∂x ∂x
h+ z f
∫
zf
∂ ∂c
D y dz + qcsl − qcf
∂y ∂y
(51)
I termini integrali a primo membro, ricordando l’analisi condotta da Taylor, possono essere espressi
tramite i seguenti coefficienti di dispersione nelle direzioni orizzontali tramite le:
∂ h+ z f
∂C
c' u' dz = − K x h
∫
∂x
∂x z f
h+ z f
∂C
∂
∂y ∫ c' v' dz = − K y h ∂y
zf
(52)
Taylor aveva definito il coefficiente di dispersione ipotizzando un moto uniforme nella sola
direzione x e in tal caso, assumendo i profili logaritmici e la distribuzione di viscosità turbolenta,
era pervenuto alle definizioni (15) e (26). Nel caso delle correnti a superficie libera, in cui si devono
considerare le due componenti orizzontali di velocità, il calcolo diviene assai incerto e complesso,
142
preferendosi così delle espressioni empiriche basate sull’esperienza che esprimono i coefficienti di
dispersione proporzionalmente a u* h .
I termini contenenti le diffusività turbolente possono essere espressi facilmente, trascurando gli
scarti c’ rispetto al valore medio sulla sezione:
h + z f
∫
z f
h + z f
∫
z f
∂
∂c
D x dz ≈
∂x
∂x
h+ z f
∂
∂c
D y dz ≈
∂y
∂y
h+ z f
∫
zf
∫
zf
∂
∂C
∂
∂C
Dx
dz ≈ h D x
∂x
∂x
∂x
∂x
(53)
∂
∂C
∂
∂C
D y
dz ≈ h D y
∂y
∂y
∂y
∂y
In definitiva l’equazione di dispersione per la concentrazione di sostanza nel campo intermedio
risulta essere la:
(
)
(
)
∂C ∂
∂Ch ∂CUh ∂CVh ∂
∂C
+ q csl − q cf
+
+
= h Dx + K x
+ h D y + K y
∂t
∂x
∂y
∂x
∂x ∂y
∂y
(54)
Vale la pena osservare che gli ultimi due termini a secondo membro sono nulli in condizioni di
flusso di sostanza nullo sul fondo e sulla superficie libera. In alcuni casi però, quando si ha
risospensione di sedimenti dal fondo oppure l’ingresso di sostanza dalla superficie libera, devono
essere presi in considerazione.
2. Stime dei coefficienti di diffusione-dispersione
L’uso pratico della (54) avviene in generale trascurando i termini diffusivo-dispersivi longitudinali,
ritenendoli di minore importanza rispetto a quelli trasversali. Per quanto riguarda questi ultimi, il
problema consiste nella stima del coefficiente di diffusione dispersione D y + K y . Tale stima viene
effettuata sulla base di evidenze sperimentali distinguendo i seguenti casi
1.
2.
3.
4.
alvei rettilinei pressoché uniformi;
alvei con variazioni graduali della direzione dell’asse dell’alveo;
alvei con variazioni sensibili della direzione dell’asse dell’alveo;
variazioni della larghezza dell’alveo in direzione longitudinale (irregolarità delle sponde o
presenza di opere sporgenti nell’alveo).
1. Nel caso di alvei rettilinei pressoché uniformi, l’analisi di molti risultati sperimentali mostra
come si possa porre:
0.1u* h < D y + K y < 0.3u* h
(55)
2. Le variazioni graduali della direzione dell’asse dell’alveo si possono tener in conto aumentando il
coefficiente numerico moltiplicativo del prodotto u* h :
0.3u* h < D y + K y < 0.9u* h
(56)
3.Le curve dell’asse dell’alveo influenzano il processo dispersivo in due modi:
143
a) le forze centrifughe cui le particelle sono sottoposte inducono un moto secondario nella
sezione diretto verso l’esterno della curva in prossimità della superficie libera e verso
l’interno, in prossimità del fondo. tale moto intensifica il processo dispersivo;
b) il moto secondario favorisce l’erosione dell’alveo in direzione trasversale, ossia favorisce
la formazione di una variazione trasversale della profondità dell’alveo che influenza il valore
del coefficiente D y + K y .
Per tener conto della curvatura dell’alveo è necessario introdurre un parametro adimensionale che
contenga appunto il raggio di curvatura R dell’alveo. Per calcolare il coefficiente D y + K y si può far
riferimento alla formula di Fischer, valida in alvei regolari:
0.25 U
K y = 5
κ u*
2
2
h
u* h
R
(57)
mentre è preferibile far riferimento alla formula di Yotsukura e Sayre per corsi d’acqua irregolari:
U
K y = (0.3 ÷ 0.9)
u*
2
2
b
u* h
R
(58)
in cui il parametro adimensionale contenente il raggio di curvatura è definito con la larghezza b
piuttosto che con la profondità h dell’alveo. Nella (58) i valori del coefficiente numerico aumentano
da 0.3 a 0.9 all’aumentare della portata.
4. La presenza di opere sporgenti nell’alveo o la variazione sensibile delle sponde si tiene in conto
aumentando il coefficiente numerico moltiplicativo del prodotto u* h rispetto al caso di alveo
rettilineo, facendolo variare tra 0.3-0.4:
0.3u* h < D y + K y < 0.4u* h
(59)
3. Applicazione
Si consideri, in una corrente a superficie libera, una sorgente di sostanza distribuita su tutta la
profondità della corrente, posta in y=y0 e con portata in massa per unità di lunghezza pari a M&
(figura 7).
144
z
b
h
y
y0
Figura 7. Dispersione nel campo intermedio. Schema di riferimento
Detti U la velocità media sulla sezione e K T ( K T = D y + K y ) la somma del coefficiente di
dispersione e del coefficiente di diffusività turbolenta mediato sulla verticale, l’equazione della
concentrazione mediata sulla verticale (54) assume la forma:
U
∂C
∂ 2C
= KT
∂x
∂y 2
(60)
essendo stato trascurato il termine dispersivo-diffusivo longitudinale e ritenendo la corrente in moto
uniforme secondo l’asse x. L’equazione (60) deve essere risolta nel dominio x ≥ 0, 0 ≤ y ≤ b con le
condizioni al contorno:
C (0 , y ) =
∂C
=
∂y y =0
M&
δ ( y − y0 )
U
∂C
=0
∂y y =b
(61)
La soluzione che soddisfa l’equazione (60) e le condizioni al contorno (61) è la (33) in cui, al posto
delle quote z, z0 compaiano rispettivamente la coordinata trasversale e la posizione della sorgente di
immissione y, y0, al posto del coefficiente D zz , il coefficiente K T e al posto del tirante idrico h la
larghezza dell’alveo b:
( y −( 2 kb + y0 ))
− ( y −(2 kb − y0 ))
−
x
x
∞
&
4 KT
4 KT
M
U
U
C (x , y ) =
e
e
+
∑
2 πK T Ux k = −∞
2
2
145
(62)
Di conseguenza valgono le considerazioni già fatte in precedenza. Per la stima della distanza, a
partire dalla sezione di immissione, oltre la quale si ha completo mescolamento della sostanza nella
sezione si ha:
0.134
Ub 2
Ub 2
≤ L y ≤ 0.536
KT
KT
(63)
Valendo il valore minimo in corrispondenza al posizionamento della sorgente in y0=0.5b, il valore
massimo in corrispondenza al posizionamento della sorgente in y0=0, y0=b. Se l’alveo è rettangolare
larghissimo, rettilineo, e la sorgente è posta in y0=0.5b, assumendo per K T il valore: K T = 0.2u* h ,
la (63) fornisce la stima:
U
L y = 0.67
u*
b
b
h
(64)
che dimostra come la distanza oltre la quale si esaurisce la fase di campo intermedio possa avere un
ordine di grandezza pari anche a qualche centinaia di volte il valore della larghezza dell’alveo.
Trasporto e diffusione di sostanze nel campo lontano.
Il mescolamento nel campo lontano si realizza a partire dalla sezione in cui si è esaurito il campo
intermedio, ossa dalla sezione in cui si è completato il mescolamento trasversale. Nel campo
lontano si può far riferimento alle equazioni di bilancio della massa e della quantità di moto, per
quanto riguarda la determinazione delle caratteristiche idrodinamiche della corrente, e all’equazione
della concentrazione, mediate sul volume infinitesimo di corrente rappresentato in figura 8.
z
dx
b
A
h
ex
x
Figura 8. Il tronco infinitesimo di corrente.
Tale operazione, condotta sulle equazioni del bilancio della massa e della quantità di moto,
proiettata nella direzione prevalente del moto ex, porta alle ben note equazioni di De Saint Venant
espresse nella coppia di variabili U, A, valide anche nel caso di alveo non prismatico:
∂A ∂UA
∂t + ∂x = 0
2
τ
∂UA + ∂U A = g i f − ∂h − f
∂t
∂x
∂x ρℜ
(65)
146
In cui: i f , τ f , ℜ sono rispettivamente la pendenza del fondo, lo sforzo esercitato dal fondo sulla
corrente e il raggio idraulico della corrente, definito come il rapporto della sezione A sul perimetro
bagnato P. Nell’ottenere le equazioni (65) sono stati trascurati i termini dispersivi. Tali termini non
possono invece essere trascurati nella equazione della concentrazione, che può essere ricavata a
partire dal bilancio di sostanza nel volume infinitesimo:
∂
∫ cdA dx = ∫ cudA − ∫ cudA + ∫ q c dA − ∫ q c dA
∂t A
A ( x + dx )
A ( x + dx )
A( x )
A( x )
(66)
in cui q c è il flusso diffusivo di sostanza attraverso le sezioni trasversali. Sviluppando
opportunamente i termini a primo e secondo membro, si ottiene:
∂
∂CA
∂
= − ∫ cudA − ∫ q c dA
∂t
∂x A
∂x A
(67)
in cui C è la concentrazione media sulla sezione, funzione di x e t. Per esplicitare il calcolo degli
integrali a secondo membro si può porre, secondo la teoria di Taylor sul coefficiente di dispersione:
∂C
c = C + c' = C + ∂x f
u = U + u'
∂C
q c = − D x
∂x
(68)
in cui u’,f sono funzioni che variano esclusivamente sulla sezione trasversale ma non con la x. Di
conseguenza:
∂C ∂
∂CA ∂CUA
∂
+ D x A ∂C
+
= − ∫ fu' dA
∂x
∂t
∂x
∂x A
∂x ∂x
(69)
Si riconosce a secondo membro della (69) il termine dispersivo che può essere espresso tramite il
1
coefficiente K, definito dalla: K = − ∫ fu' dA . Si ha dunque, semplificando il primo membro e
AA
dividendo per la sezione trasversale:
(
)
∂C
∂C 1 ∂
∂C
+U
=
K + Dx A
∂t
∂x A ∂x
∂x
(70)
Ricorrendo ad opportune ipotesi si può dimostrare come la funzione f abbia una definizione del tipo
(23). E’ ovvio che risulta del tutto inutile pretendere di assegnare rigorosamente le funzioni f ed u e
di conseguenza calcolare il coefficiente K negli alvei naturali. E’ invece interessante osservare,
come quest’ultimo possa essere solitamente posto nella forma di Fischer:
K=I
(be u' )2
(71)
D
147
in cui:
•
be è la larghezza efficace della sezione, stimata pari a circa 0.7b;
•
u' è l’ordine di grandezza della differenza tra la componente di velocità in direzione x e il
suo valor medio sulla sezione: stimato pari a circa (0.4 ÷ 0.5)U ;
•
D è l’ordine di grandezza della media sulla sezione della diffusività turbolenta, stimato pari
a 0.6u* h ;
I è un fattore numerico che può, sotto ipotesi molto restrittive, essere definito
rigorosamente. Un valore normalmente accettato per le correnti reali è 0.07.
•
In definitiva la (71) diviene:
K = 0.011
(Ub )2
(72)
hu*
Di particolare utilità poiché consente la stima del K sulla base di dati immediatamente disponibili:
velocità media, larghezza dell’alveo, profondità e velocità d’attrito, quest’ultima calcolata tramite
la: u* = gi f h . I valori stimati dalla (72) sono corretti almeno come ordine di grandezza.
Nelle applicazioni fondamentali riguardanti i problemi di mescolamento nel campo lontano, come si
vedrà più oltre, viene applicata l’equazione (70) ipotizzando la corrente in moto uniforme: si
assumono cioè valori di U , h ed A costanti. Di conseguenza, la soluzione fondamentale della (70),
corrispondente all’immissione di una massa M in x=0, t=0, è data dalla:
C ( x ,t ) =
M
A 4πKt
e
−
( x −Ut )2
(73)
4 Kt
ossia dalla gaussiana con picco in x=Ut e varianza: σ 2 = 2 K .
Nelle applicazioni pratiche spesso si utilizza l’approssimazione di campo lontano immediatamente a
partire dal punto di immissione della sostanza: quando cioè lo schema diffusivo-dispersivo non è
consistente a causa del fatto che le dimensioni caratteristiche della nuvola di sostanza sono molto
minori della dimensione caratteristica dell’alveo (la sua lunghezza). I rilievi sperimentali infatti
evidenziano che la distribuzione della sostanza, nelle fasi iniziali del processo di diffusionedispersione, è sostanzialmente non gaussiana, con skewness, momento statistico del terzo ordine,
diverso da zero. Tale fatto è evidentemente dovuto alla non validità del modello di campo lontano
nelle fasi iniziali del processo di diffusione-dispersione. La distribuzione di sostanza si mostra
praticamente gaussiana, solo a partire da una distanza dal punto di immissione, il cui ordine di
grandezza è stimato dalla:
L∝
b 2U
K
(74)
A tal proposito è utile far riferimento al diagramma riportato in figura 9.
148
Figura 9. Diagramma di crescita della varianza adimensionalizzata in funzione del tempo.
In tale diagramma si riporta la crescita della varianza sperimentale adimensionalizzata Σ di una
nuvola di sostanza rilasciata in un canale rettilineo, a sezione costante, in moto uniforme in
funzione della distanza adimensionalizzata dal punto di immissione. L’adimensionalizzazione è
Ub 2
definita in base all’ordine di grandezza della distanza di mescolamento trasversale:
KT
La varianza adimensionalizzata è praticamente il quadrato della dimensione caratteristica della
nuvola di sostanza, la cui crescita lineare rispetto al tempo rivela la validità dello schema
dispersivo di campo lontano. Nel diagramma vengono illustrate le varie zone di validità della
approssimazione di campo lontano:
•
•
•
•
la zona A è la zona in cui la distribuzione della concentrazione di sostanza ha una varianza
che cresce non linearmente con il tempo e in cui lo schema di campo lontano non è valido:
tale fatto essendo testimoniato da una distribuzione non gaussiana, caratterizzata da una
forte dissimmetria;
la zona B è la zona di decadimento della dissimetria;
la zona C è la zona di inizio di validità della distribuzione gaussiana e di conseguenza della
validità dello schema di campo lontano;
la zona D è la zona in cui la varianza inizia a crescere linearmente;
In definitiva sarebbe opportuno applicare la approssimazione di campo lontano a partire dall’inizio
della zona C. Prima dell’inizio di tale zona si dovrebbero applicare le approssimazioni di campo
vicino e intermedio. La valutazione dell’inizio della zona di campo lontano e del coefficiente K
deve tener conto di tutti i fattori legati alla geometria dell’alveo (meandri, zone di calma, opere
idrauliche, etc.) che interagiscono in modo complesso e praticamente impossibile da valutare con
approssimazione accettabile: di qui la estrema variabilità sia del K che della zona di inizio di campo
lontano, delle quali si può stimare solo l’ordine di grandezza.
149
Capitolo VIII. Processi di trasporto indotti da differenze di
densità. Il caso dei laghi.
Stratificazione termica nei laghi
Nelle correnti fluviali la principale sorgente di trasporto e diffusione turbolenta è costituita dal moto
predominante della corrente che a sua volta è determinato e governato dalla forza di gravità. Tale
moto si presenta con una marcata unidimensionalità, tale da rendere possibile, in molti casi,
l’adozione di modelli semplificati, quali le equazioni di shallow water o di De Saint-Venant
ottenute rispettivamente mediando lungo la verticale o sull’intera sezione le equazioni di bilancio
della massa e della quantità di moto.
Completamente diverso si presenta lo studio del trasporto turbolento nei laghi. Infatti in tali corpi
idrici i moti predominanti sono legati alle differenze di densità, indotte dalla distribuzione di
temperatura all’interno del corpo idrico, e alla azione del vento sulla superficie. Tali moti
presentano in generale una marcata tridimensionalità e assenza di direzioni preferenziali e sono
legati al ciclo termico stagionale.
Per illustrare, nella sua essenzialità, i processi idrodinamici che avvengono nelle acque lacustri, si
consideri il lago schematizzato in figura 1:
z
H
z0+∆z
z0
z=0
Figura 1. Rappresentazione schematica di un lago
Si supponga che il lago sia in quiete e che gli sforzi di taglio sulla superficie libera dovuti al vento
siano assenti. Si consideri una particella fluida di volume V, posta su un piano orizzontale a quota z0
dal fondo, e la si sposti (verso l’alto) ad una distanza ∆z dalla posizione originaria. Sia ρ=ρ(z) la
distribuzione della densità del fluido lungo la verticale. In seguito allo spostamento verticale la
particella fluida è sottoposta all’azione della forza d’inerzia, della forza peso e della risultante della
spinta dovuta alla pressione (trascurando eventuali forze che si oppongono al moto):
ρ 0V
d 2 ∆z
= − ρ 0 gV + Π
dt 2
(1)
150
in cui ρ 0 ,Π sono rispettivamente la densità del fluido alla quota z0 e la risultante della spinta dovuta
alla pressione. Quest’ultima, essendo la particella completamente immersa, è pari alla spinta di
Archimede, calcolata alla quota z0+∆z:
Π = ρ ( z 0 + ∆z )gV
(2)
che può essere sviluppata in serie di Taylor di punto iniziale z0:
ρ ( z 0 + ∆z )gV = ρ 0 +
dρ
dz
∆z gV
z = z0
(3)
Da cui l’equazione (1) assume la forma
d 2 ∆z g dρ
−
ρ 0 dz
dt 2
∆z = 0
(4)
z = z0
che ammette la soluzione:
δ
∆z = e
2
g dρ
ρ 0 dz
z = z0
t
−e
−
g dρ
ρ 0 dz
z = z0
t
(5)
d∆z
= 0 . La soluzione (5), sia pure a livello
dt t =0
qualitativo, fornisce interessanti indicazioni sulla stabilità della posizione iniziale della particella e
sulla possibilità che vi siano moti indotti dalla distribuzione verticale della densità. Se infatti
dρ
> 0 , la grandezza ∆z cresce indefinitamente, ossia la posizione iniziale della particella è
dz z = z0
soddisfacente le condizioni iniziali: ∆z (0 ) = δ ,
instabile. Se viceversa
dρ
dz
< 0 la grandezza ∆z varia periodicamente nel tempo, oscillando con
z = z0
δ
: la posizione iniziale della particella può pertanto essere considerata stabile in
2
quanto la perturbazione imposta alla particella non cresce indefinitamente nel tempo. Infine, per
dρ
= 0 , la grandezza ∆z risulta identicamente nulla. La grandezza N, definita secondo la:
dz z = z0
ampiezza pari a
N2 =
g dρ
ρ 0 dz
(6)
z = z0
è, dal punto di vista dimensionale, una frequenza (nota come frequenza di Brunt-Väisälä) ed è la
frequenza con cui una particella di fluido che si trova in un corpo fluido con densità decrescente
verso l’alto (stratificazione stabile) oscillerebbe se allontanata dalla sua posizione di equilibrio.
151
La presenza di forze dissipatrici non cambia la natura delle cose: dunque una distribuzione di
densità decrescente verso l’alto o costante con la quota costituisce rispettivamente una
stratificazione stabile o indifferente, nel senso che inibisce o non favorisce i moti verticali legati alle
differenze di densità. Una distribuzione di densità crescente verso l’alto invece favorisce i moti
legati alle differenze di densità.
Nei laghi le differenze di densità sono legate esclusivamente alle differenze di temperatura, pertanto
si potranno avere gradienti di densità solo se vi sono gradienti di temperatura. L’andamento della
densità dell’acqua in funzione della temperatura è mostrato in figura 2:
Figura 2. Andamento della densità in funzione della temperatura.
Si noti come la densità presenti un massimo in corrispondenza alla temperatura di TM=4°C e sia
sempre decrescente con la temperatura per T>TM. Si noti inoltre come la densità sia crescente con la
temperatura per T<TM.
Nei laghi la distribuzione di temperatura lungo la profondità varia fondamentalmente in funzione
delle stagioni e della posizione geografica del lago. Si consideri l’esempio di un lago posto in una
regione in cui alla fine della stagione invernale il lago presenta, a tutte le profondità, una
temperatura pari a circa 4°C. Moti favoriti da gradienti di densità sono dunque assenti e gli unici
moti possibili sono dovuti all'azione del vento, che può facilmente provocare un rimescolamento
delle acque più superficiali, a contatto con l'atmosfera e quindi contenenti abbondante ossigeno
disciolto, con quelle sottostanti. La circolazione primaverile che così si instaura ricarica di
ossigeno l'intera colonna d'acqua (figura 3):
Figura 3. Distribuzione della temperatura all’inizio della primavera e circolazione indotta dal vento.
152
Con l'avanzare della primavera, l'apporto di calore attraverso la radiazione solare determina un
innalzamento della temperatura delle acque superficiali. L’azione meccanica del vento sulla
superficie libera potrà operare un certo rimescolamento delle acque più superficiali (più calde e
quindi meno dense) con quelle immediatamente sottostanti (più fredde e quindi più dense),
contribuendo così alla distribuzione del calore dagli strati più superficiali a quelli via via più
profondi. Tuttavia, con il progredire della stagione calda, tra acque superficiali ed acque profonde
andrà formandosi un gradiente termico, e quindi di densità, sempre più elevato e comunque tale da
inibire il rimescolamento ad opera del vento. Nella stagione calda, quindi, si avrà nel lago uno strato
superficiale caldo (epilimnio) separato dalle acque profonde uniformemente fredde (ipolimnio) da
uno strato di passaggio (metalimnio), caratterizzato da un rapido abbassamento della temperatura
con il crescere della profondità (figura 4). In questa situazione di stratificazione estiva lo scambio
di ossigeno tra le acque superficiali e quelle profonde è quasi nullo, in quanto la distribuzione della
densità lungo la verticale è tale da inibire eventuali moti di rimescolamento. Addirittura, se il lago è
molto produttivo l'ossidazione della sostanza organica può consumare completamente l'ossigeno
disciolto nelle acque ipolimnetiche arrivando a determinare una situazione di anossia, ovviamente
incompatibile con la vita degli organismi acquatici.
Figura 4. Stratificazione estiva del lago.
In autunno l'acqua superficiale si raffredda, diventa più densa e scende verso il fondo, trovandosi in
condizioni di instabilità (il gradiente della densità lungo la verticale diviene positivo), determinando
la completa circolazione delle acque e favorendo l’apporto di ossigeno all’intero corpo idrico. Alla
fine della stagione autunnale, il lago si trova ad avere una distribuzione di temperatura uniforme e
pari a 4°C (figura 5).
In inverno gli strati superficiali del lago si raffreddano maggiormente di quelli sottostanti, con
formazione di uno strato ghiacciato. L'anomalia di comportamento della densità dell'acqua ha come
conseguenza il fatto che lo strato superficiale più freddo, meno denso, si trova sopra gli strati più
profondi a 4 °C e dunque più densi. Si ha così la stratificazione invernale (figura 6).
153
Figura 5. Circolazione autunnale indotta dal gradiente di densità.
Figura 6. Stratificazione invernale del lago.
Un lago che, come quello appena descritto, circola due volte l'anno si dice dimittico. Il ciclo
termico di un lago è influenzato da fattori climatici (piovosità e ventosità), morfologici (profondità
e forma del bacino lacustre) e dipende altresì dalla latitudine e dall'altitudine che influenzano
direttamente la quantità e l'intensità della radiazione solare, cioè la sorgente di energia termica. A
seconda del loro ciclo termico i laghi si possono classificare come:
l) di tipo polare, nei quali la superficie è costantemente gelata e la massa d'acqua sottostante ha
sempre una temperatura inferiore ai 4°C. In essi non si verifica mai la piena circolazione; perciò
questi laghi molto particolari sono detti amittici.
2) di tipo sub-polare, che presentano la superficie libera dai ghiacci solo per un breve periodo
estivo. Questi laghi hanno un solo periodo di isotermia e quindi un'unica piena circolazione (laghi
monomittici).
154
3) di tipo temperato, con temperatura superficiale inferiore a 4°C in inverno, anche se possono non
gelare, e superiore a 4°C in estate. Sono laghi che hanno un ciclo termico come quello illustrato
sopra; poiché hanno due periodi di isotermia e quindi due piene circolazioni l'anno sono laghi
dimittici.
4) di tipo sub-tropicale. Questa categoria include anche i laghi della regione mediterranea, nei quali
la temperatura è sempre superiore, anche negli strati profondi, a 4°C. In essi si verifica annualmente
un solo periodo di isotermia (fine inverno) e quindi una sola piena circolazione (laghi
monomittici).
5) di tipo tropicale. Sono i laghi delle regioni calde con temperatura sempre superiore a 4°C in
tutta la massa d'acqua. In questi laghi le differenze di temperatura tra strati superficiali e profondi
sono minime durante tutto l'anno (laghi anisomittici).
Oltre ai tipi di lago sopra illustrati, che si chiamano olomittici perché quando raggiungono
l'isotermia circolano completamente, ci sono anche i laghi meromittici, nei quali l'acqua di fondo
non si mescola mai con l'acqua degli strati superficiali. Questo succede in laghi ove, per accumulo
di soluti, l'acqua di fondo acquista una densità superiore a quella imputabile alla sua temperatura.
Va infine detto che la presenza di immissari favorisce l’arricchimento di ossigeno dell’ipolimnio
nella fase di stratificazione estiva: le acque dei fiumi infatti, ricche di ossigeno e fredde, si muovono
verso il fondo del lago, costituendo delle vere e proprie correnti legate alle differenze di densità.
Processi di mescolamento indotti da scambi termici superficiali
Per studiare i processi di trasporto e diffusione indotti da scambi termici nei laghi, si può far
riferimento ad una semplificazione basata sul fatto che i moti sono estremamente lenti, ancorché
turbolenti date le dimensioni spaziali in gioco, e caratterizzati dalla predominanza della componente
di velocità verticale. In altre parole, si può supporre che gli scambi di quantità di moto e di energia
nella direzione orizzontale siano trascurabili e utilizzare un tipo di approccio “globale”. In tale tipo
di approccio il corpo idrico viene assimilato ad una o più masse aventi distribuzione uniforme di
temperatura e densità. In particolare il caso di più masse si presta a rappresentare la stratificazione
termica estiva, in cui il lago è diviso nella parte superiore (epilimnio) a temperatura alta e nella
parte inferiore (ipolimnio) a temperatura più bassa. In questo caso si ipotizza che il moto avvenga
per raffreddamento dell’epilimnio e conseguente instabilità nella distribuzione di densità con
componente verticale di velocità il cui modulo ha ordine di grandezza pari ad uf. Si ipotizza inoltre
che variazioni delle grandezze fisiche occorrano uniformemente nelle masse in cui è diviso il corpo
idrico.
Nell’approccio semplificato un parametro essenziale è la massa d’acqua totale contenuta nel lago,
data dalla:
H
M = ∫ ρAdz
(7)
0
essendo H,A, rispettivamente, la massima profondità del lago e la sua sezione orizzontale alla quota
z. Trascurando l’eventuale presenza di immissari ed emissari e le perdite d’acqua dovute
all’evaporazione, la M si può considerare costante rispetto al tempo e la sua derivata totale è
pertanto data dalla:
dM
d
dH
dρ
dH dρ dT
Adz = ρ s As
= ∫ ρAdz = ρA z = H
+∫
+
dt
dt 0
dt 0 dt
dt dT dt
H
H
155
H
∫ Adz = ρ
H −h
s
As
dH
dT
− αρ sVh
dt
dt
(8)
Il secondo membro della (8) è stato ottenuto applicando la regola di Leibniz, essendo
rispettivamente ρ s , As i valori della densità e della superficie del lago. Il quarto membro si ottiene
considerando che la variazione di densità avviene uniformemente a causa della variazione di
temperatura nello strato superiore, esteso fino alla profondità h dalla superficie. Nell’ultimo
membro la variazione di densità viene espressa tramite il coefficiente di espansione termica α e
presenta il segno negativo in quanto ad un aumento della temperatura si ha una diminuzione di
densità: ρ (t ) = ρ s (1 − α (T (t ) − Ts )) , inoltre si è messo in evidenza il fatto che l’integrale
H
∫ Adz
H −h
rappresenta il volume Vh della parte di lago compreso tra la profondità H-h alla profondità H. Dalla
(8), eguagliando a zero la variazione temporale della massa del lago, si ha:
V dT
dH
dT
=α h
≈ αh
dt
As dt
dt
(9)
Vh
viene approssimato dalla estensione della colonna d’acqua h, interessata dal
As
moto convettivo. D’ora in avanti si farà sempre uso di tale semplificazione. La variazione di livello
del lago è dunque messa in relazione alla variazione di temperatura nella parte superiore del lago
(epilimnio) e dovuta ad un raffreddamento stagionale o diurno.
Il bilancio termico della massa d’acqua contenuta nella parte interessata dalla variazione di
temperatura fornisce:
in cui il rapporto
ρC a V h
dh
dT
= QAs − (T − Ti )ρC a As
dt
dt
(10)
in cui C a ,Q sono rispettivamente il calore specifico dell’acqua e il calore asportato dalla superficie
del lago per unità di superficie e Ti la temperatura dell’ipolimnio. Il secondo termine a secondo
membro tiene conto dell’effetto di raffreddamento indotto dal mescolamento tra epilimnio ed
ipolimnio, conseguente al moto convettivo. Il flusso di calore Q è positivo o negativo, se,
rispettivamente, acquistato o ceduto dal lago attraverso la sua superficie.
V
Combinando la (9) e la (10) si ottiene (tenendo conto della h ≈ h ):
As
αQ
dH
dh
=
− α (T − Ti )
dt
dt
ρC a
(11a)
che mette in evidenza il fatto che, in seguito ad un raffreddamento della superficie del lago, il
livello di quest’ultimo si abbassa a seguito dell’aumento di densità. Il secondo termine a secondo
membro può essere trascurato rispetto al primo. Di conseguenza si può approssimare la (11a) con
la:
αQ
dH
=
dt
ρC a
(11b)
156
Vh
≈ h , non compare
As
alcun riferimento alla effettiva forma del lago e che pertanto le (11a-b) possono essere pensate
come derivate dal bilancio termico e di massa di una colonna d’acqua di superficie unitaria. Nel
seguito si adotterà tale ipotesi: ossia si considereranno bilanci di massa, energia meccanica ed
energia termica, relativi ad una colonna d’acqua di sezione unitaria. Tale ipotesi è giustificata dal
fatto che i moti verticali comunque predominano nei processi di mescolamento dovuti a scambi
termici e che gli scambi di energia e quantità di moto in direzione orizzontale sono trascurabili.
Consideriamo ora il bilancio di energia meccanica totale del lago. Tale bilancio deve esprimere il
fatto che la somma della variazione temporale di energia cinetica K, di energia potenziale P del lago
e della potenza dovuta al mescolamento deve eguagliare la potenza dissipata:
E’ anche interessante osservare che nelle (11a,b), grazie alla approssimazione
dK dP
+
+ Wmix = −Φ
dt
dt
(12)
L’energia cinetica K di una colonna d’acqua di sezione unitaria, di altezza h, sede del moto dovuto
alla differenza di densità, avente ordine di grandezza della velocità pari a u f , si può esprimere
facilmente tramite la:
H
1
1
K = C K ∫ ρ s u 2f dz = C K ρ s u 2f h
2
2
H −h
(13)
Essendo C K un coefficiente di “aggiustamento” dell’energia cinetica, che tiene conto di tutte le
approssimazioni fatte. L’integrale è esteso da H-h ad H perché solo tale porzione della colonna
d’acqua è interessata dal moto caratterizzato dalla velocità avente ordine di grandezza uf; il resto
della colonna è in quiete. In tal modo h può essere interpretato come l’ordine di grandezza
dell’estensione spaziale del pennacchio di fluido che, a seguito di un raffreddamento della
superficie, ha aumentato la sua densità e pertanto “affonda” nella massa d’acqua più calda
sottostante.
z
Q
H
uf
h
z=0
Figura 7. Rappresentazione schematica del processo di mescolamento dovuto al raffreddamento superficiale.
157
In figura 7 è rappresentato schematicamente il processo sinora descritto: a seguito di un
raffreddamento della superficie lo strato d’acqua immediatamente a contatto con l’atmosfera si
raffredda e penetra in quello sottostante con velocità avente ordine di grandezza uf. La distanza di
penetrazione h viene determinata dalla presenza dell’ipolimnio, ossia dal fatto che ad una certa
profondità si ha un brusco abbassamento della temperatura ed un conseguente brusco aumento della
densità: di conseguenza la densità del pennacchio freddo che affonda risulta uguale a quella del
fluido ambiente e il suo affondamento si arresta. In corrispondenza dell’ipolimnio si verifica anche
il mescolamento tra i due strati. La variazione temporale dell’energia cinetica risulta pari a:
dK 1
dh
= C K ρu 2f
dt
2
dt
(14)
L’energia potenziale totale della colonna d’acqua di sezione unitaria è data dalla:
H
P = ∫ ρgzdz
(15)
0
e la corrispondente variazione temporale è data dalla:
dP
dH
dρ
dH
dρ dT
dH
dT
= ρ s gH
+ ∫
gzdz = ρ s gH
+ ∫
gzdz = ρ s gH
− αρ s g
dt
dt H − h dt
dt H − h dT dt
dt
dt
H
H
H
∫ zdz
(16)
H −h
che, sfruttando la (10), la (11b) e calcolando l’ultimo integrale a quarto membro, diviene:
dP
Q
Q As (2 H − h )h
Q h
= αgH
− αg
≈ αg
dt
Ca
C a Vh
Ca 2
2
(17)
As
viene approssimato dalla estensione della colonna d’acqua h.
Vh
A seguito del raffreddamento della superficie (Q<0) si ha dunque una diminuzione della energia
potenziale dovuto all’affondamento degli strati freddi superficiali. Tale diminuzione è significativa
e coincide con l’aumento di energia cinetica dovuto ai moti turbolenti e stimato dalla (14). La
potenza dovuta al mescolamento Wmix è dovuta al fatto che lo strato di acqua che si raffredda
penetra fino all’ipolimnio e si arresta, poiché incontra un fronte di fluido con la stessa densità, con il
dh
quale si mescola. L’avanzamento del fronte di mescolamento avviene con velocità pari a . Dette
dt
(
)
(
)
ρ i = ρ s − ρ sα Ti − Ts , ρ = ρ s − ρ sα T − Ts le densità, rispettivamente di una particella fluida
facente parte dell’ipolimnio e di una facente parte dello strato superiore, la potenza dovuta al
mescolamento può essere calcolata tramite la:
in cui il rapporto
Wmix = (ρ i − ρ )g
h dh
h dh
= ρ s gα (T − Ti )
2 dt
2 dt
(18)
158
in quanto si suppone che la colonna d’acqua, di sezione unitaria, altezza h/2 e densità ρ i si sollevi
dh
dal fronte con velocità
, mentre la colonna d’acqua, di sezione unitaria, altezza h/2 e densità ρ s
dt
dh
. Di conseguenza la (12) diviene:
viaggi verso il fronte con velocità
dt
(
)
1
dh
Q
ρ s C K u 2f + αg (T − Ti )h
= −αg
h −Φ
2
dt
2C a
(19)
Che può anche essere posta nella forma:
Q
1
dh
ρ s C K u 2f + αg (T − Ti )h
= αg
h −Φ
2
dt
2C a
(
)
(20)
in cui si è tenuto conto del fatto che, essendo il flusso di calore Q negativo (ceduto dal lago
attraverso la sua superficie), la quantità Q = −Q è positiva.
La (20) è una equazione che può essere usata per studiare l’evoluzione del mescolamento termico
del lago, noti i vari parametri in gioco. Tra questi risulta di particolare interesse l’ordine di
grandezza dei moti convettivi uf, ordine di grandezza che può essere espresso in funzione degli altri
parametri in gioco tramite alcune semplici considerazioni. A tal proposito si osservi che una
particella fluida sulla superficie, in seguito al raffreddamento di quest’ultima, è soggetta ad una
h
∆ρ
accelerazione di modulo pari a: g
sviluppa la velocità
= αg T − Ts e nell’intervallo di tempo
uf
ρs
u f . D’altra parte anche la differenza di temperatura ∆T = T − Ts viene sviluppata nello stesso
intervallo di tempo e può essere espressa dalla:
∆T ≈
Q
Q
dT h
h
≈
=
dt u f
ρ s Ca h u f ρ s Ca u f
(21)
Pertanto:
αg Q h
h
∆ρ h
g
= αg ∆T
=
= uf
ρs u f
uf
ρ s C a u 2f
αg Q h
⇒ u f =
ρ
C
s a
13
(22)
Tenendo conto della (22), la (20) può essere posta nella forma:
(C
2
K u f + αg (T − Ti )h
) dh
=u
dt
3
f
1 − 2Φ
ρ u3
s f
(23)
che unitamente alla:
(T − Ti ) dh
dT
Q
=
−
dt ρC a h
h
dt
(24)
159
costituiscono un sistema di equazioni differenziali ordinarie per la determinazione della evoluzione
della temperatura T e dell’estensione dello strato di mescolamento termico h nel lago. I parametri da
assumere sono pertanto: la temperatura dell’ipolimnio Ti , il flusso di calore superficiale Q, la
densità dell’acqua in superficie ρ s , il calore specifico dell’acqua C a , il coefficiente di espansione
termica dell’acqua α e la potenza dissipata nel moto convettivo Φ. Quest’ultima grandezza è assai
problematica da definire: tiene conto della dissipazione di energia cinetica turbolenta e della
trasmissione di calore nel metalimnio. In generale si assume direttamente proporzionale al cubo
dell’ordine di grandezza dei moti convettivi, sicché la grandezza:
Cd = 1 −
ρ s u 3f 2 − Φ
2Φ
=
ρ s u 3f
ρ s u 3f 2
(25)
diviene praticamente costante, ossia un parametro da determinare sperimentalmente. Il parametro
C d rappresenta “l’efficienza” della superficie del lago in quanto è il rapporto della differenza tra la
potenza cinetica acquisita in seguito al moto convettivo e le perdite sulla potenza cinetica acquisita
in seguito al moto convettivo. L’ordine di grandezza di essa è pari a C d ∝ 10 −1 .
Effetto del vento
Vento debole
L’effetto del vento consiste essenzialmente nell’azione forzante esercitata sulla superficie libera del
lago e comporta un acquisto di energia cinetica da parte del lago. Si devono distinguere due casi
fondamentali: vento debole (velocità media fino a 10 m/s) e vento forte (velocità media maggiore di
10 m/s). Nel caso di vento debole si può continuare ad assumere l’ipotesi che i moti orizzontali
siano comunque trascurabili e che si possa di conseguenza usare il bilancio di potenza (23), in cui a
secondo membro compaia la potenza ceduta al lago dal vento e a primo membro la potenza cinetica
espressa in funzione del quadrato del modulo della velocità totale u, risultante dalla combinazione
del moto convettivo con l’azione del vento. La potenza ceduta al lago dal vento viene posta nella
forma: C wu*2 , essendo C w un coefficiente di proporzionalità e u* la velocità di attrito sulla superficie
del lago. Di conseguenza l’equazione (23), tenendo conto della (25), diviene:
(C
K
u 2 + αg (T − Ti )h
) dh
=C u
dt
d
3
f
+ C w u*3
(26)
L’utilizzo della equazione (25) prevede la stima della velocità di attrito u* legata al vento e del
coefficiente di proporzionalità C w . La velocità u, risultante dalla combinazione del moto convettivo
con l’azione del vento, può essere stimata tramite la:
Cd u = Cd u + C u
3
3
f
3
w *
C
⇒ u = u 3f + w u*3
Cd
13
(27)
Mentre la velocità di attrito u* può essere calcolata esprimendo lo sforzo tangenziale τ esercitato
dal vento sulla superficie del lago tramite il coefficiente di resistenza λ e la velocità del vento
indisturbata U:
160
τ = ρ s u*2 = ρ a
λ
8
U2
⇒ u* =
ρa λ
U
ρs 8
(28)
essendo ρ a la densità dell’aria. Il coefficiente di resistenza dipende debolmente dalla velocità del
vento per venti con velocità comprese tra 5 e 15 m/s e successivamente rimane costante. Il suo
valore tipico ha comunque un ordine di grandezza pari a 10 −3 . Il coefficiente di proporzionalità C w
è più difficile da determinare, data la molteplicità dei parametri da cui dipende, e in effetti presenta
una dispersione di valori molto ampia (ordine di grandezza compreso tra 10 −2 ÷ 10 2 ).
Vento forte
Nel caso di vento forte non è più possibile adottare la semplificazione vista sopra e consistente nel
trascurare gli scambi orizzontali di energia e quantità di moto, poiché i moti orizzontali diventano
consistenti e predominanti su quelli generati dal raffreddamento superficiale. In tal caso si deve
ripartire dalle equazioni di bilancio della massa, della quantità di moto e dell’energia e applicare le
semplificazioni che ricorrono nello studio dei flussi geofisici. Tali semplificazioni si basano su tre
ipotesi fondamentali:
1. l’ipotesi di Boussinesque sull’influenza delle variazioni di temperatura sulla densità;
2. i moti considerati sono caratterizzati da scale temporali comparabili con il periodo della
rotazione terrestre (T=86400 s);
3. i moti considerati sono caratterizzati da scale spaziali orizzontali L molto maggiori di quelle
verticali H (H/L<<1).
La prima ipotesi consiste nel considerare gli effetti della temperatura sulla densità solo nel termine
della forza peso, la terza ipotesi è valida quasi sempre (salvo in casi davvero particolari come nei
laghetti montani o nei piccoli invasi artificiali) poichè un lago ha sempre un estensione superficiale
maggiore di quanto sia profondo, e ha notevoli conseguenze sia sulla equazione di bilancio della
massa che sulla equazione di bilancio della quantità di moto. Per valutare appieno le conseguenze
delle tre ipotesi fondamentali consideriamo l’equazione di bilancio della massa. L’ipotesi di
Boussinesque sull’influenza delle variazioni di temperatura sulla densità ci permette di considerare
la densità costante salvo che nel termine della forza peso, che appare nella equazione di bilancio
della quantità di moto, pertanto l’equazione di bilancio della massa, considerata nel riferimento
cartesiano ortogonale, è da considerarsi nella forma seguente:
∂u ∂v ∂w
+
+
=0
∂x ∂y ∂z
(29)
Introducendo le seguenti scale spaziali e delle velocità dei moti orizzontali e
~ , l’equazione (29) si può riscrivere nella
verticali: x = LX , y = LY , z = Hz ,u = Uu~ , v = Uv~ , w = Ww
forma adimensionale, in cui compaiono i rapporti delle scale spaziali e di velocità:
~
U ∂u~ ∂v~ W ∂w
+
=0
+
L ∂X ∂Y H ∂Z
(30)
U W
, devono avere lo stesso ordine di grandezza. Si deduce perciò che la scala delle
L H
H
H
velocità dei moti verticali è data dalla: W = U = ηU , in cui η = è un parametro piccolo, ossia
L
L
i coefficienti
161
molto minore dell’unità in virtù della terza ipotesi. In definitiva l’equazione (29) può essere usata
così com’è per determinare la velocità w, note le velocità orizzontali, tramite integrazione rispetto
alla z:
∂u ∂v
w = − ∫ + dz
∂x ∂y
zf
z
(31)
La (31) sottolinea il fatto che nei moti generati da venti forti, il moto verticale, di ordine di
grandezza minore rispetto a quello orizzontale, è determinato comunque dai moti orizzontali,
diversamente a quanto accade in assenza di vento o di vento debole, in cui il moto verticale è
causato dal raffreddamento della superficie e dalla conseguente generazione di una stratificazione
instabile.
Consideriamo ora la terza componente della equazione di bilancio della quantità di moto:
∂Tzy ∂Tzz
∂T
∂w
∂w
∂w
∂w
∂p
−
+u
+v
+ w − 2 ρ 0 Ωu cos(ϕ ) = − − ρg − zx −
∂y
∂z
∂x
∂y
∂z
∂z
∂x
∂t
ρ 0
(32)
in cui le componenti cartesiane T zx ,T zy ,T zz comprendono gli sforzi viscosi e di Reynolds (di
conseguenza le componenti di velocità u,v,w e la pressione p devono intendersi come grandezze
mediate nel tempo). L’ipotesi di Boussinesq permette di considerare la variazione della densità (con
la temperatura) solo nel termine della forza peso. Naturamente ρ 0 è la densità di riferimento. Nella
(32) si è inoltre tenuto conto della forza di Coriolis, dal momento che il lago si trova nel sistema di
riferimento Oxyz solidale alla terra, avente per asse z la verticale locale, diretta dal centro della terra
verso l’esterno, con verso opposto alla forza peso, asse x perpendicolare a z e tangente al parallelo
passante per O, asse y perpendicolare agli assi x,z e tangente al meridiano passante per O. Ω,ϕ sono
rispettivamente il modulo del vettore velocità di rotazione angolare terrestre e l’angolo di latitudine
misurato sul meridiano passante per O (figura 8). La velocità di rotazione angolare della terra vale:
Ω=
rad
2π
2π
=
= 7.27 10 −5
T
s
86400
(33)
Figura 8. Il sistema di riferimento adottato per lo studio dei flussi geofisici.
162
Applicando alla (32) la stessa adimensionalizzazione della equazione di bilancio della massa e
considerando l’adimensionalizzazione dei tempi: la t=(L/U)t*, della pressione p = ρ 0U 2 P e degli
~ 2τ , i = x , y , z , si ottiene:
sforzi T = ρ w 2τ = ρ η 2U 2 w
zi
0
zi
0
zi
~
~
~
~
∂w
∂w
∂w
~ ∂w − 2η u~ cos(ϕ ) = − ∂P − ρ 1 − η 3 ∂τ zx + ∂τ zy
v
+ u~
+~
+w
∂X
∂Y
∂X
∂Y
∂Z Ro
∂Z ρ 0 Fr 2
∂t *
(34)
η2
in
cui
compaiono
i
seguenti
parametri
adimensionali:
Ro =
∂τ
− η 2 zz
∂Z
U
, Fr =
ΩL
U
=
U
gηL
gH
rispettivamente il numero di Rossby e di Froude. Nella (34) si possono trascurare tutti i termini
aventi a fattore η rispetto a quelli che non lo hanno in virtù del fatto che η<<1. Di conseguenza la
(34) diviene:
−
∂P ρ 1
−
=0
∂Z ρ 0 Fr 2
(35)
Dalla (35) si può trarre un interessante risultato considerando la densità ρ come la somma della
densità di riferimento ρ0 e di una variazione ∆ρ dovuta alla stratificazione che si presenta sulla
coordinata verticale. Quest’ultima può essere espressa, ricordando la definizione della frequenza di
N 2 ρ0
dρ
H , essendo σ una costante di
H =σ
Brunt-Väisälä (6), tramite la: ∆ρ = σ
g
dz
proporzionalità. Si ottiene perciò dalla (35)
2
1
1
∂P ρ 1
∂P
∆ρ
∂P
HN
+
=
+ 2 +
=
+ 2 +σ
=0
2
2
∂Z Fr
∂Z ρ 0 Fr
∂Z Fr
ρ 0 Fr
U
(36)
La (36) mostra che la distribuzione si può considerare puramente idrostatica se il parametro
HN
è molto minore di 1: ossia se gli effetti della stratificazione sono trascurabili.
adimensionale
U
Viceversa se tale fatto non si verifica, la distribuzione di pressione deve tener conto degli effetti di
stratificazione, che nei laghi, è bene ricordarlo, sono dovuti alla distribuzione verticale della
temperatura. In linea generale dunque, la distribuzione di pressione viene ottenuta integrando
l’equazione:
H
p = ∫ ρgdz
(37)
z
in cui H è la quota della superficie libera del lago, considerata costante in prima approssimazione (si
trascurano i moti ondosi aventi luogo sulla superficie libera). Inoltre la densità varia secondo la
verticale in funzione della variazione della temperatura lungo la stessa direzione. Seguendo la stessa
linea di ragionamento adottata per la componente verticale della equazione di bilancio della quantità
di moto, si perviene alle seguenti forme adimensionali per le componenti orizzontali della
equazione di bilancio della quantità di moto:
163
∂P ∂τ xz
∂u~ ~ ∂u~ ~ ∂u~ ~ ∂u~ 2 ~
∂t * + u ∂X + v ∂Y + w ∂Z − Ro v sin(ϕ ) = − ∂X − ∂Z
~
~
~
~
~ ∂v + 2 u~ sin(ϕ ) = − ∂P − ∂τ yz
∂v + u~ ∂v + v~ ∂v + w
∂t *
∂X
∂Y
∂Z Ro
∂Y
∂Z
(38)
I termini di pressione, come detto sopra, possono dare un contributo in relazione al fatto che la
siano presenti gradienti orizzontali della temperatura. I termini che tengono conto della forza di
Coriolis contengono il parametro adimensionale di Rossby. Tale parametro evidentemente fornisce
una stima del rapporto tra l’ordine di grandezza delle forze di inerzia e quello della forza di
ρ 0U 2 L2
U
=
dunque tanto più il numero di Rossby è grande, tanto più gli effetti
Coriolis: Ro =
3
ρ 0 ΩUL ΩL
legati alla forza di Coriolis sono trascurabili e viceversa. Si deve notare inoltre che gli effetti della
forza di Coriolis dipendono anche dalla latitudine ϕ . Per laghi di medie e grandi dimensioni nella
fascia temperata (poniamo per fissare le idee ϕ=45°) la forza di Coriolis deve essere considerata.
Infatti il prodotto dell’inverso del numero di Rossby per il seno dell’angolo di latitudine assume il
sin(45°)
U
0.7 U
≈
≈ 10 4 . Tale fattore, posto U=1 m/s, assume ordine di grandezza
valore:
−5
Ro
L
7.310 L
unitario se la dimensione caratteristica orizzontale del lago ha ordine di grandezza pari a 104 m. In
altre parole un lago che abbia un estensione orizzontale caratteristica di 10 km risente in modo non
trascurabile degli effetti legati alla forza di Coriolis. In definitiva le equazioni che si adottano nello
studio dei flussi geofisici e che pertanto possono essere adottate nello studio dell’idrodinamica dei
laghi, sono le seguenti:
1 ∂p 1 ∂Txz
∂u
∂u
∂u
∂u
(
)
2
ϕ
u
v
w
v
sin
+
+
+
−
Ω
=
−
−
∂t
ρ 0 ∂x ρ 0 ∂z
∂x
∂y
∂z
∂v
1 ∂p 1 ∂T yz
∂v
∂v
∂v
−
+ u + v + w + 2Ωu sin(ϕ ) = −
ρ 0 ∂y ρ 0 ∂z
∂x
∂y
∂z
∂t
H
p = ρgdz
∫z
z
w = − ∂u + ∂v dz
∫ ∂x ∂y
zf
(39)
A queste equazioni vanno unite la legge di variazione della densità con la temperatura:
ρ = ρ 0 (1 − α (T − T0 ))
(40)
e la equazione di trasporto diffusione della temperatura:
∂T
∂T
∂T
∂T
∂
∂T
+u
+v
+w
= Kz
∂t
∂x
∂y
∂z ∂z
∂z
(41)
in cui sono stati trascurati i termini di diffusione orizzontale, perché il trasporto della temperatura
operato dalle componenti della velocità media in direzione orizzontale, prevale sui termini diffusivi
orizzontali. Naturalmente vanno assegnate le condizioni al contorno, iniziali e deve essere
specificato un modello di turbolenza. Le condizioni al contorno devono essere valutate caso per
164
caso. Per quanto riguarda il modello di turbolenza ci si può orientare verso un modello basato sul
∂u
∂v
concetto della eddy viscosity: Txz ≈ −ν T
,T yz ≈ −ν T
. Analogamente, sfruttando l’analogia di
∂z
∂z
Reynolds, si può definire il coefficiente di diffusione della temperatura come il prodotto della
viscosità turbolenta per il numero di Prandtl della temperatura σ T : K z = σ Tν T .
L’interazione della stratificazione con il moto turbolento generato dal vento è caratterizzata dal fatto
che parte della energia cinetica turbolenta viene assorbita sotto forma di lavoro svolto per
modificare la stratificazione. In altre parole, la stratificazione agisce come moderatrice della
turbolenza.
La considerazione dei processi di dispersione-diffusione nei laghi, in conseguenza dei moti
convettivi forzati dal vento o indotti dai soli gradienti termici, può essere condotto unendo al
sistema di equazioni (39), (40) e (41) un’equazione di dispersione-diffusione della concentrazione
di sostanza. E’ evidente che le approssimazioni di campo vicino, lontano e intermedio, legate
comunque all’esistenza di una direzione prevalente del moto non hanno senso nel presente ambito. I
processi diffusivo-dispersivi nei laghi, andranno quindi studiati nell’ambito delle ipotesi
semplificative poste alla base della presente trattazione.
165
Capitolo IX. Le correnti indotte da differenze di densità.
Premessa. Classificazione delle correnti.
Nei corpi idrici si verificano spesso condizioni di movimento in cui porzioni di fluido con densità
differente vengono a contatto tra loro. Tali condizioni di moto possono essere naturali, ossia
possono presentarsi spontaneamente in natura, oppure essere generate dalle attività umane. Nella
prima categoria si possono considerare, per restringere l’attenzione a quanto si verifica nei corpi
idrici, le condizioni che si verificano negli estuari, le correnti termiche che si generano nei laghi,
analizzate nel precedente capitolo, le correnti di alta densità (miscugli costituiti da acqua e
sedimenti finissimi) che si verificano talora nei fiumi o anche sul fondo dei laghi.
Presso gli estuari la corrente fluviale, di acqua dolce viene a contatto con l’acqua marina, salata. La
differenza di densità tra le due masse d’acqua, in opportune condizioni (di marea, di vento, di
temperatura etc.), è tale da favorire lo sviluppo di una corrente di acqua salata - il cosiddetto “cuneo
salino” (salt wedge) - che risale sul fondo dell’alveo il corso del fiume. La risalita del cuneo può
anche estendersi per distanze ragguardevoli (decine di km) senza che si abbiano fenomeni
significativi di mescolamento tra l’acqua salata del cuneo salino e l’acqua dolce del fiume, vista la
stabilità della stratificazione, e può costituire una forma di contaminazione ambientale non
trascurabile, soprattutto se l’acqua del fiume deve essere utilizzata a fini irrigui.
Nella seconda categoria (correnti generate da differenze di densità dovute a cause artificiali) si
possono considerare tutti i casi di immissione nei corpi idrici di sostanze inquinanti con densità
differente da quella del fluido ambiente (l’acqua). In entrambi i casi la quantità che caratterizza il
movimento di tali correnti è la differenza di densità ∆ρ tra la densità del fluido contaminante ρ c e la
densità del fluido ambiente ρ a , assumendo che ρ c > ρ a .
In base all’entità delle differenze relative di densità è consuetudine assumere la seguente
classificazione delle correnti:
∆ρ
•
0<
•
0.2% ≤
•
ρa
≤ 0.2% ⇒ correnti di densità (causate da gradienti termici, come nei laghi)
∆ρ
≤ 2% ⇒ correnti di gravità (causate da differenze di salinità, come negli estuari)
ρa
∆ρ
2% ≤
≤ 20% ⇒ correnti di torbidità (miscugli di acqua e sedimenti finissimi: fanghi,
ρa
argille diluite etc.)
In linea generale, all’aumentare del parametro ∆ρ la tendenza alla stratificazione delle due masse
fluide tende ad aumentare. Il parametro adimensionale di interesse al riguardo è il numero di
Richardson definito come il rapporto tra l’ordine di grandezza della forza idrostatica e l’ordine di
grandezza della forza d’inerzia, calcolate entrambe facendo riferimento alla corrente densa. Per
definire il numero di Richardson si può fare riferimento allo schema di corrente a superficie libera,
riportato in figura 1 in cui viene riprodotta una corrente di fluido di densità ρ a , avente sezione
trasversale A, velocità media sulla profondità U f , profondità H. Al di sotto di questa corrente ne
scorre un’altra di densità ρ c ( ρ c > ρ a ), velocità U c e profondità avente ordine di grandezza h. La
differenza tra le densità genera una differenza di spinta idrostatica sulla sezione della corrente, il cui
ordine di grandezza è dato da:
Fidr = g∆ρh 2 B
(1)
166
in cui B è la larghezza dell’alveo. L’ordine di grandezza della forza d’inerzia, dovuta al flusso di
quantità di moto, è dato dalla:
∆ρ 2
U c hB ≈ ρ aU c2 hB
Fqm = (ρ a + ∆ρ )U c2 hB = ρ a 1 +
ρ
a
L’uguaglianza approssimata è dovuta al fatto che il rapporto
(2)
∆ρ
ρa
è trascurabile rispetto all’unità. Il
rapporto dell’ordine di grandezza (1) all’ordine di grandezza (2) fornisce l’espressione del numero
di Richardson:
Ri =
∆ρ gh
ρ a U c2
(3)
L’espressione (3) mette in luce il fatto che il numero di Richardson è in pratica l’inverso del
∆ρ ρ c
=
−1.
quadrato di un numero di Froude, in cui la gravità sia ridotta secondo la percentuale
ρa
ρa
Il numero di Richardson indica dunque l’importanza relativa della forza idrostatica rispetto a quella
d’inerzia della corrente densa. Se il numero di Richardson è molto piccolo (Ri<0.1) le forze di
inerzia predominano e le due correnti presentano stratificazione trascurabile. Se invece il numero di
Richardson ha ordine di grandezza unitario o più che unitario (Ri≥1), predomina la forza di gravità
e la stratificazione della corrente è ben definita.
L’ampiezza del parametro ∆ρ dipende dal tipo di corrente. Rifacendosi alla classificazione vista
sopra, le correnti generate da differenze di temperatura sono quelle che presentano la mimima
stratificazione e dunque la maggior facilità al mescolamento, in quanto hanno il numero di
Richardson più piccolo, a parità di altri fattori. Le correnti di gravità, generate da differenze di
salinità presentano una stratificazione che può essere moderata o debole, a seconda delle differenze
di salinità. Le correnti di torbidità infine, generate da miscugli di acqua e sedimenti finissimi,
presentando i valori maggiori del parametro ∆ρ , sono quelle che presentano la massima
stratificazione. Le correnti di torbidità necessitano un elevato livello di turbolenza per mantenere in
sospensione il materiale solido e il loro comportamento è notevolmente più complesso di quello
delle correnti generate da differenze di temperatura e salinità. Infatti nello studio delle correnti di
torbidità non si può prescindere dal considerare i fenomeni di sedimentazione e risospensione dei
sedimenti. Tali fenomeni corrispondono rispettivamente alla deposizione del materiale solido sul
fondo e al passaggio in sospensione del materiale dal fondo nella corrente. Per questo motivo le
correnti di torbidità si dicono non-conservative e si distinguono dalle correnti di densità e gravità,
dette invece conservative.
Le correnti di torbidità si incontrano nei corsi d’acqua (fiumi, canali) e nei laghi (artificiali e
naturali). Nei laghi le correnti di torbidità sono generate da frane subacquee o trasportate dagli
immissari. Una volta entrate nel lago tali correnti si propagano sul fondo, con notevole velocità,
praticamente indipendente dalla velocità della corrente circostante.
Caratteri generali delle correnti generate da differenze di densità
Le correnti generate da differenze di densità mostrano dei caratteri generali che ben si prestano ad
una descrizione qualitativa.
167
ρa
H-h
Zona di mescolamento
ρc
h*
N
Uf
O
h
Sedimentazione-risospensione
Figura 1. Schema generale di una corrente generata da differenze di densità
In figura 1 viene riprodotto lo schema di una corrente generata da differenze di densità. Si può
immaginare che questa corrente si sia originata in seguito all’immissione nel fluido ambiente avente
densità ρa di una massa di fluido contaminante avente densità ρc. Si forma una corrente, in cui si
distingue una zona frontale, culminante nel naso (punto N in figura 1), che avanza con velocità Uf.
A valle del naso si trova una zona di più o meno intenso mescolamento, ossia una zona in cui il
fluido ambiente e il contaminante si mescolano. Nella zona di mescolamento ovviamente la densità
del fluido è intermedia tra quella del contaminante e del fluido ambiente. Sempre a valle del naso,
ma in prossimità del fondo, si ha la zona in cui è possibile il verificarsi di sedimentazione e
risospensione di sedimenti, nel caso in cui la corrente sia generata da un miscuglio di acqua e
sedimenti. La sedimentazione e la risospensione dei sedimenti sono favoriti dalla particolare
circolazione di fluido interna ed esterna alla corrente. Il flusso esterno, meno denso, gira attorno alla
corrente e può, in funzione delle caratteristiche della corrente, “sollevare” leggermente il naso dal
fondo, insinuandosi dentro la corrente dopo un breve tratto, provocando eventualmente l’intrusione
dei sedimenti.
Il numero di Reynolds formato con la velocità del fronte Uf, l’altezza totale H e la viscosità
UH
) è importante ai fini della estensione e della
cinematica del fluido contaminante ( Re =
ν
conformazione della zona di mescolamento. Per numeri di Re bassi (Re<10) la zona di
mescolamento è praticamente assente, mentre per numeri di Reynolds sufficientemente alti
(Re>1000) la zona di mescolamento assume dei caratteri macroscopici che restano invariati
all’aumentare di Reynolds. La zona di mescolamento è generata dall’evoluzione di fenomeni di
instabilità alla Kelvin-Helmholtz14 che hanno origine sul fronte della corrente e che evolvono
vigorosamente immediatamente a valle di esso. In figura 2, che mostra una corrente di gravità
sperimentale ( ρ a = 1000 kgm −3 , ρ c = 1150 kgm −3 ), si nota il grande vortice derivante
dall’evoluzione della instabilità di Kelvin-Helmholtz. Tali vortici, detti anche “cavalloni” o billows,
vengono mostrati schematicamente in figura 3A. Altre forme caratteristiche dell’evoluzione delle
instabilità sono i “lobi” (lobes) e le “fenditure” (clefts), mostrati in figura 3B.
Figura 2.Corrente di gravità sperimentale.
14
L’instabilità di Kelvin-Helmholtz si verifica sulla superficie di separazione esistente tra due correnti, dello stesso
fluido o di fluidi diversi, aventi velocità differenti.
168
Figura 3A-B. Rappresentazione schematica delle forme di instabilità in prossimità del fronte delle correnti generate da
differenze di densità.
La velocità di avanzamento del fronte è una quantità di estrema importanza nello studio delle
correnti generate dalle differenze di densità. Una stima di prima approssimazione può essere fatta
ricorrendo ad una applicazione del teorema di Bernoulli ad una forma semplificata della corrente
(figura 4), consistente in un rettangolo di altezza h*, che si estende verso destra con velocità di
avanzamento costante pari ad Uf. L’altezza h* è precisamente lo spessore della corrente costituita
dal solo fluido denso. L’applicazione del teorema di Bernoulli viene facilitata dal considerare un
sistema di riferimento in moto di traslazione uniforme con velocità pari a -Uf. In tale sistema di
riferimento il fronte della corrente risulta in quiete e il fluido ambiente in moto verso quest’ultimo,
con velocità uniforme e pari a -Uf.
H
h*
N
-Uf
O
Figura 4. Schema semplificato della corrente.
Si ipotizza inoltre che la distribuzione di pressione sia idrostatica. Esprimendo il carico idraulico nei
h
punti O, N, posti a quota * dal fondo (ove si suppone sia posto il naso della corrente), si ha:
2
169
h*
1
2
H O = 2 ρ aU f + ρ a g H − 2
H = ρ g (H − h ) + ρ g h*
a
*
c
N
2
(4)
Uguagliando infine H O , H N si ottiene l’espressione della velocità di avanzamento del fronte:
Uf = g
ρc − ρa
h*
ρa
(5)
Il valore (5) è del tutto indicativo, poiché nella realtà il rapporto
nemmeno costante, ma dipende dal rapporto
Uf
ρ − ρa
g c
h*
ρa
non è unitario e
h*
.
H
Modellazione alla shallow water delle correnti generate da differenze di
densità
La modellazione delle correnti generate da differenze di densità è estremamente difficoltosa a causa
della complessità dei fenomeni che si verificano nelle zone di mescolamento, di sedimentazione e
risospensione. Tuttavia un approccio modellistico semplificato è possibile, facendo riferimento al
fatto che queste correnti presentano quasi sempre uno sviluppo longitudinale molto più importante
di quello trasversale. Di conseguenza possono essere adottate tutte le ipotesi semplificative
caratteristiche dei moti in acque basse. In particolare, per semplicità di trattazione, si partirà
dall’ipotesi che la corrente sia bidimensionale e appartenga al piano xz, che la deposizione e la
risospensione dei sedimenti, eventualmente trasportati dalla corrente densa, non alterino il fondo
della corrente, assunto piano.
z
dx
ρ2, h2
pI
ρ1,h1
x
Figura 5. Schema della corrente per l’applicazione delle equazioni di bilancio in forma globale.
Inoltre si supporrà che la densità delle due correnti sia omogenea o possa variare in funzione della
concentrazione dei sedimenti: quest’ultima possibilità è utile per lo studio delle correnti di torbidità,
in cui la corrente densa è un miscuglio di fluido ambiente (acqua) e sedimenti. Nelle correnti di
170
torbidità si dovrà tener conto della variazione di densità con le coordinate spaziali. Per semplicità
tuttavia si adotterà la consueta ipotesi di Boussinesque, secondo cui le variazioni di densità hanno
importanza solamente nel termine della forza peso.
Facendo riferimento allo schema riprodotto in figura 5, è comodo considerare due correnti
sovrapposte, di densità ρ1,ρ2 e di spessore h1,h2. Per ottenere le equazioni che governano
l’evoluzione dei due strati, piuttosto che far riferimento al procedimento seguito nel capitolo VII
(che nel caso delle due correnti sovrapposte diviene abbastanza complicato), si applicheranno le
equazioni di bilancio della massa e della quantità di moto in forma globale ai due volumetti fluidi
sovrapposti, di estensione longitudinale dx. Si supporrà inoltre che l’alveo in cui le correnti si
muovono sia prismatico, con sezione rettangolare, di larghezza B. Il bilancio della massa in forma
globale impone che variazioni di massa nei volumetti fluidi si potranno avere a causa del flusso di
massa attraverso le superfici di frontiera dei volumetti stessi:
∂
∂t ∫ ρ1 dV = ∫ ρ1 v 1 ⋅ ndA
A1
V1
∂ ρ 2 dV = ρ 2 v 2 ⋅ ndA
∫
∂t V∫1
A2
2
(6)
Il flusso di massa deve essere calcolato sulle superfici trasversali della corrente e sulla superficie di
separazione, attraverso la quale, a causa del mescolamento tra le due correnti, si ha una portata in
massa q m per unità di superficie, che “lascia” uno strato ed “entra” nell’altro. Sulle superfici
trasversali il flusso di massa può essere espresso attraverso la velocità media sulla sezione. Pertanto
si può ottenere dalle (6), considerando il fatto che i volumetti sono infinitesimi:
∂ρ1 h1 B
∂t dx = ρ1U 1 h1 B x − ρ1U 1 h1 B x + dx + q m Bdx
∂ρ 2 h2 B dx = ρ U h B − ρ U h B
− q m Bdx
2 2 2
2 2 2
x
x + dx
∂t
(7)
I termini contenenti q m presentano, come è giusto, segni opposti nelle due equazioni, che sommate
devono fornire la variazione della massa totale, dovuta ai soli flussi sulle sezioni trasversali. I flussi
di massa scambiati tra le due correnti si devono infatti bilanciare perfettamente. Tenendo conto
della incomprimibilità dei due fluidi ed espandendo in serie di Taylor arrestata al primo ordine il
flusso di massa nella sezione in x+dx, si ottiene:
∂h1 ∂U 1 h1 q m
∂t + ∂x = ρ
1
∂h2 + ∂U 2 h2 = − q m
∂t
∂x
ρ2
(8)
La definizione della portata in massa q m verrà considerata più avanti. Consideriamo ora il bilancio
della quantità di moto in forma globale, applicato ai due volumetti:
171
∂
∂t ∫ ρ1 v 1 dV = ∫ ρ1 (v 1 ⋅ n )v 1 dA + ∫ ρ1fdV + ∫ T1ndA
A1
V1
A1
V1
∂ ρ v dV = ρ (v ⋅ n )v dA + ρ fdV + T ndA
∫ 2 2 1 V∫ 2
∫ 2
∂t V∫ 2 2
A21
A2
2
2
(9)
in cui f,T sono rispettivamente il vettore delle forze di massa e il tensore degli sforzi. Considerando
la proiezione delle equazioni nella direzione prevalente del moto, si ottiene dalle (9):
(
)
∂ρ1U 1 h1 B
dx = ρ1U 12 h1 − ρ1U 12 h1
B+
x
x + dx
∂t
∂h1
ρ g sin(α )h Bdx + p h − p h
Bdx + T1xx h1 x − T1xx h1 x + dx B − F1 (2h1 + B )dx − FI Bdx
1
1 1 x
1 1 1 x + dx B + p I
1
∂x
∂ρ 2U 2 h2 B
∂h
dx = ρ 2U 22 h2 − ρ 2U 22 h2
B − p I 1 Bdx +
x
x + dx
∂t
∂x
ρ 2 g sin(α )h2 Bdx + p 2 h2 x − p 2 h2 1 x + dx B + T2 xx h1 x − T2 xx h1 x + dx B − F2 2h2 dx + FI Bdx
(
(
(
)
(
)
)
) (
)
(10)
Nei secondi membri compaiono nell’ordine: i flussi di quantità di moto calcolati con le velocità
medie sulle sezioni trasversali, la forza peso, la cui proiezione secondo la direzione del
moto g sin(α ) è positiva in caso di alveo declive, la forza di pressione agente sulle sezioni
trasversali e sulla superficie di separazione p I , la forza risultante dagli sforzi turbolenti mediati
sulla profondità T1xx ,T2 xx e agenti sulle sezioni trasversali, gli sforzi resistenti al moto F1 , F2 , generati
dal contatto delle correnti con il fondo e le pareti dell’alveo e lo sforzo scambiato in corrispondenza
alla superficie di separazione FI evidentemente di segno opposto nelle due equazioni. Il flusso
della quantità di moto dovuto all’entrata della portata in massa q m viene trascurato, ipotizzando che
la direzione della velocità di entrata del fluido di uno strato nell’altro sia perpendicolare alla
direzione prevalente del moto. Espandendo in serie di Taylor arrestata al primo ordine i termini
calcolati in x+dx e tenendo conto delle (8), dalle equazioni (10) si ottiene:
qm
∂U 1
p I ∂h1 1 ∂T1xx
F1
FI
1 ∂p1 h1
∂U 1
∂t + U 1 ∂x + U 1 ρ h = g sin(α ) − ρ h ∂x + ρ h ∂x − ρ ∂x − ρ ℜ − ρ h
1 1
1 1
1 1
1
1 1
1 1
∂U 2 + U ∂U 2 − U q m = g sin(α ) − 1 ∂p 2 h2 − p I ∂h1 − 1 ∂T2 xx − F2 + FI
2
2
∂t
∂x
ρ 2 h2
ρ 2 h2 ∂x
ρ 2 h2 ∂x ρ 2 ∂x
ρ 2 ℜ 2 ρ 2 h2
(11)
in cui ℜ1 ,ℜ 2 sono i rapporti dei perimetri bagnati a contatto con le pareti dell’alveo alle rispettive
h1 B
h B B
sezioni. Per alvei rettangolari molto larghi si ha: ℜ1 =
≈ h1 ,ℜ 2 = 2 = .
2h1 + B
2h2
2
Le pressioni p1 , p 2 sono le pressioni medie sulle sezioni trasversali della corrente. Per la corrente
superiore, costituita da fluido ambiente con densità omogenea e ipotizzando una distribuzione
idrostatica, la pressione media sulla sezione è pari alla pressione nel centro di figura:
p2 = ρ 2 g
h2
2
(12)
172
Per quanto riguarda la corrente inferiore, se è costituita da fluido contaminante con densità
omogenea, la definizione della pressione media sulla sezione trasversale p1 è pari alla pressione nel
centro di figura:
p1 = p I + ρ1 g
h1
2
(13)
in cui p I è la pressione sulla superficie di separazione, esprimibile con il valore idrostatico:
p I = ρ 2 gh2 .
Se invece la corrente inferiore è un miscuglio di fluido ambiente di densità ρ 2 e di un contaminante
di densità ρ s e concentrazione media sulla sezione trasversale C s = C s ( x ,t ) , funzione della
coordinata spaziale e del tempo, la densità ρ1 può essere espressa dalla:
ρ1 = ρ s C s + (1 − C s )ρ 2 = ρ 2 + (ρ s − ρ 2 )C s
(14)
di conseguenza la pressione media nella sezione varrà, in questo caso:
p1 = p I + ρ 2 g
h1
h
+ (ρ s − ρ 2 )C s g 1
2
2
(15)
conservando p I il significato di pressione sulla superficie di separazione.
Le equazioni finali si possono ottenere dalle (11), sostituendovi i valori delle pressioni medie
p1 , p 2 , nei due casi contemplati dalle (12),(13) o (12),(14), tenendo conto della espressione
idrostatica per p I . Si ha pertanto, nel caso di due correnti con densità omogenea:
qm
∂U 1
∂h1
ρ 2 ∂h2 1 ∂T1xx
F1
FI
∂U 1
∂t + U 1 ∂x + U 1 ρ h = g sin(α ) − g ∂x − g ρ ∂x − ρ ∂x − ρ ℜ − ρ h
1 1
1
1
1 1
1 1
∂U 2 + U ∂U 2 − U q m = g sin(α ) − g ∂h1 − g ∂h2 − 1 ∂T2 xx − F2 + FI
2
2
∂t
∂x
∂x
∂x ρ 2 ∂x
ρ 2 h2
ρ 2 ℜ 2 ρ 2 h2
(16)
Nel caso in cui la corrente inferiore sia un miscuglio di fluido ambiente di densità ρ 2 e di un
contaminante di densità ρ s :
∂C s 1 ∂T1xx
qm
∂U 1
∂h1
ρ 2 ∂h2
h1
F1
FI
∂U 1
∂t + U 1 ∂x + U 1 ρ h = g sin(α ) − g ∂x − g ρ ∂x − 2 ρ (ρ s − ρ 2 )g ∂x − ρ ∂x − ρ ℜ − ρ h
1 1
1
1
1
1 1
1 1
∂U 2 + U ∂U 2 − U q m = g sin(α ) − g ∂h1 − g ∂h2 − 1 ∂T2 xx − F2 + FI
2
2
∂t
∂x
∂x
∂x ρ 2 ∂x
ρ 2 h2
ρ 2 ℜ 2 ρ 2 h2
(17)
E’ interessante osservare che le equazioni (17) differiscono dalle (16) per la presenza del termine
che tiene conto della variazione della densità dello strato più denso con la coordinata spaziale, per il
tramite della derivata spaziale della concentrazione. Nel caso in cui si debba tener conto della
variazione della concentrazione del contaminante all’interno dello strato più denso, si dovrà
pertanto accoppiare alle equazioni di bilancio della quantità di moto (17) e della massa (12),
173
l’equazione di diffusione-dispersione della sostanza contaminante, ottenibile mediando sulla
sezione l’equazione della concentrazione:
∂ c' s w'1
∂c s ∂c s u1
∂c
∂c
∂
+
− Ws s +
= D xx s
∂t
∂x
∂z
∂z
∂x
∂x
(18)
in cui c s ,u1 ,Ws , w'1 sono, rispettivamente, la concentrazione media locale, la velocità orizzontale
media locale, la velocità verticale media, coincidente con la velocità di sedimentazione, e la velocità
verticale fluttuante. Il termine a secondo membro è il termine di trasporto turbolento. Integrando
l’equazione (18) sulla sezione della corrente densa e tenendo conto del fatto che la concentrazione è
nulla sulla superficie di separazione tra i due strati, si ha:
∂C s h1 ∂C sU 1 h1
+
= c' s w'1
∂t
∂x
z =η
− Ws c s
z =η
+ h1
∂ ∂C s
K
∂x ∂x
(19)
A secondo membro compare un termine diffusivo-dispersivo espresso in funzione della
concentrazione mediata sulla profondità C s e del coefficiente di diffusione–dispersione K, per la
definizione del quale si rimanda al capitolo VII. I primi due termini a secondo membro invece
rappresentano rispettivamente i fenomeni della risospensione (evidentemente correlata alla velocità
verticale di agitazione, dunque ai vortici in prossimità del fondo) e della sedimentazione,
quest’ultima caratterizzata dalla velocità di sedimentazione.
Definizione del flusso di massa e dei termini di sedimentazione e
risospensione.
Il flusso di massa q m tra i due strati è nullo nel caso in cui le due correnti siano formate da liquidi
omogenei, non siano miscibili (ad es. acqua ed olio) e siano pertanto separate da una superficie ben
definita. In tal caso valgono le equazioni (8) e (16) con q m = 0 : le due densità sono costanti
all’interno di ciascuno strato. Si può inoltre assumere flusso di massa nullo quando le correnti, pur
essendo miscibili (ad es. costituite da acqua e acqua e sale), presentino debole tendenza al
mescolamento (numero di Richardson minore dell’unità).
Nel caso di correnti con forte tendenza al mescolamento non è possibile definire una superficie di
separazione. Tuttavia, facendo riferimento allo schema illustrato in figura 1, la zona di
mescolamento, nell’ambito di una simulazione allo shallow water, può essere vista come una
superficie attraverso la quale avviene lo scambio di massa, quantificato dalla portata in massa
q m per unità di superficie. Quest’ultima dipende evidentemente dalla velocità del fluido normale
alla superficie che rappresenta la zona di mescolamento, calcolata in prossimità di tale superficie. Si
può porre:
q m = ρ1u1ni = ρ 2 u 2 ni = ρ1 EU 1 = ρ 2 EU 2
(20)
in cui u1ni ,u 2 ni sono le velocità normali alla superficie che rappresenta la zona di mescolamento
“viste” rispettivamente dai due strati ed E è il coefficiente di entrainment. Il coefficiente di
entrainment permette di esprimere le velocità u1ni ,u 2 ni , non rappresentabili in uno schema allo
shallow water, tramite le velocità effettivamente calcolate nell’ambito di tale schema: U 1 ,U 2 In
base alla definizione (20) le equazioni (8) divengono:
174
∂h1 ∂U 1 h1
∂t + ∂x = EU 1
∂h1 + ∂U 1 h1 = − EU
2
∂t
∂x
(21)
Il coefficiente E è una funzione del numero di Richardson Ri, espresso dalla formula (3). E’ stato
osservato sperimentalmente che E decresce al crescere di Ri. Ossia si conferma quanto detto in
precedenza: per valori elevati del numero di Richardson la stratificazione delle correnti predomina
sulle forze d’inerzia che tenderebbero a farle mescolare. Una relazione abbastanza usata per il
calcolo di E è la seguente:
ρ 2 − ρ1 h1
Ri = g ρ
U 12
1
0.075
E =
1 + 718Ri 2.4
(22)
I termini di risospensione-sedimentazione, che appaiono nella equazione (19) possono essere posti
nella forma:
c' s w'1
z =η
− Ws c s
z =η
= h1W s (E s − c b )
(23)
ossia si fanno entrambi dipendere dalla velocità di sedimentazione Ws . I coefficienti E s ,cb sono
rispettivamente i coefficiente di entrainment sul fondo e la concentrazione al fondo ( c s z =η = cb ).
Entrambi dipendono dalle caratteristiche del flusso e del sedimento tramite la velocità di attrito sul
fondo u* b , la velocità di sedimentazione Ws e il numero di Reynolds del sedimento
d g
Res =
ρ s − ρ1
d
ρ1
, definito facendo ricorso al diametro medio d e alla densità ρ s del
ν
sedimento. Si è soliti rappresentare la dipendenza di E s da tali grandezze tramite il parametro
u* b
Re s : E s cresce al crescere di tale parametro e raggiunge un valore più o meno
Ws
costante ( E s = 0.3 ) per ζ > 50 . La concentrazione al fondo si esprime in funzione della
dimensionale ζ =
u
cb = C s f * b . La funzione
Ws
u
approssimativamente costante (f=2) nel campo di valori: 1 < * b < 50 .
Ws
La velocità di sedimentazione e di attrito sul fondo si possono infine esprimere tramite le:
concentrazione
media
nella
corrente
tramite
λ1
U1
u* b =
8
W = 2 g g ρ s − ρ1
s
3 Cr
ρ1
la:
f
(24)
175
è
in cui λ1 ,C r sono rispettivamente il coefficiente di Darcy-Weisbach della corrente densa e il
coefficiente di resistenza del sedimento alla caduta libera nel liquido in quiete di densità ρ1 ,
pensato come una sferetta di diametro d.
Definizione dei termini di sforzo.
Nelle equazioni (16), (17) compaiono i termini F1 , F2 , FI che tengono conto degli sforzi tangenziali
esercitati sulle rispettive correnti dalle pareti dell’alveo e dalla superficie di separazione.
Facendo riferimento alla figura 6, in cui viene rappresentata una vista frontale schematica delle
h2
B
h1
Figura 6. Rappresentazione schematica della vista frontale delle correnti
Correnti, ipotizzando che la corrente superiore “tiri” quella inferiore e adottando l’espressione di
Darcy-Weisbach si ha:
λ1
F1 = ρ1 8 U 1 U 1
λ2
F2 = ρ 2 U 2 U 2
8
λ I 12
λ I 21
FI = ρ1 8 (U 1 − U 2 )U 1 − U 2 = ρ 2 8 (U 1 − U 2 )U 1 − U 2
(25)
Vale la pena osservare che lo sforzo tangenziale scambiato tra le due correnti attraverso la
superficie di separazione viene espresso in funzione della velocità relativa tra le correnti e assume il
segno di detta velocità relativa. Gli indici di resistenza λ I 12 ,λ I 21, vengono definiti in base al numero
di Reynolds calcolato con la velocità relativa e la densità due correnti; essi devono soddisfare la
ρ
λ
ρ
relazione: I 12 = 2 . Per le correnti di gravità, legate alla differenza di salinità si ha: 2 ≈ 1 ,
ρ1
λ I 21 ρ1
dunque non si commette un grave errore nel porre: λ I 12 ≈ λ I 21 = λ I .
∂T1xx ∂T2 xx
possono essere definiti tramite l’introduzione di una
,
∂x
∂x
viscosità turbolenta mediata sulla sezione K ti ≈ cu* i hi in cui l’indice i si riferisce allo strato in
considerazione e c è una costante. In tal modo si ha:
I termini di sforzo turbolento:
176
Tixx = −cu* i hi
∂U i
∂x
(26)
Direzioni caratteristiche e configurazioni di moto permanente di correnti
stratificate immiscibili.
Si consideri un caso in cui non vi sia scambio di massa tra le correnti, plausibile se il numero di
Richardson è sufficientemente alto, ossia se la stratificazione è abbastanza accentuata. Si trascurino
altresì i termini di sforzo turbolento mediati sulla profondità. Le equazioni (8) e (16), riscritte
sviluppando le derivate dei prodotti e lasciando nei secondi membri i termini di sforzo e i termini
noti, assumono la forma:
∂h1
∂U 1
∂h1
∂t + U 1 ∂x + h1 ∂x = 0
∂h2 + U ∂h2 + h ∂U 2 = 0
2
2
∂t
∂x
∂x
∂U
∂U 1
∂h
ρ ∂h
F
F
1 + U1
+ g 1 + g 2 2 = gi f − 1 − I
∂x
∂x
ρ1 ∂x
ρ1 h1 ρ1 h1
∂t
∂U
∂U 2
∂h
∂h
F
2F
2 +U2
+ g 1 + g 2 = gi f − 2 + I
∂t
∂x
∂x
∂x
ρ 2 B ρ 2 h2
(27)
in cui i f rappresenta la pendenza del fondo. Le direzioni caratteristiche associate al sistema
differenziale (27) possono essere determinate facendo la combinazione lineare dei primi membri
delle (27) ed eguagliandola ad una combinazione lineare delle derivate totali delle grandezze in
dx
gioco sulla direzione caratteristica c =
nel piano x,t. Si ha:
dt
∂h1
∂h1
∂U 1
∂h2
∂U 2
∂h2
σ 1 ∂t + U 1 ∂x + h1 ∂x + σ 2 ∂t + U 2 ∂x + h2 ∂x +
∂U
∂U 2
∂h
∂h
ρ ∂h
∂U 1
∂h
∂U 2
1
+U2
+g 1 +g 2=
+ U1
+ g 1 + g 2 2 + σ 4
σ 3
∂x
∂x
∂x
ρ1 ∂x
∂x
∂x
∂t
∂t
∂h
∂h
∂h
∂U
∂U 2
∂h
∂U
∂U 2
σ 1 1 + c 1 + σ 2 2 + c 2 + σ 3 1 + c 1 + σ 4
+c
∂t
∂x
∂x
∂x
∂x
∂t
∂t
∂t
(28)
I coefficienti σ i , i = 1,K ,4 della combinazione lineare (28) possono essere determinati imponendo
l’uguaglianza tra i coefficienti delle derivate spaziali a primo e secondo membro della (28). Si
ottiene il sistema di equazioni:
g
g σ 0
0
U 1 − c
1
ρ
0
U2 − c g 2
g σ 2 0
ρ1
=
h1
U1 − c
0
0 σ 3 0
h2
U 2 − c σ 4 0
0
0
(29)
177
Il sistema (29) è lineare e omogeneo nei σ i . Affinché esistano soluzioni diverse dalla banale:
σ i = 0 , i = 1,K ,4 è necessario che si annulli il determinante della matrice dei coefficienti. Tale
condizione forma l’equazione per la determinazione della direzione caratteristica c, algebrica di IV°
grado in c, detta anche equazione secolare o caratteristica. Le radici hanno espressioni
estremamente complicate, funzioni delle velocità, delle profondità delle correnti e del rapporto tra le
densità. Tali radici rappresentano le celerità delle perturbazioni che si formano sulla superficie di
separazione tra le due correnti e sulla superficie libera. Ipotizzando che le velocità delle correnti
coincidano e che il rapporto delle densità sia pressoché unitario, la qual cosa si verifica nelle
correnti di gravità dovute a concentrazioni di salinità, le radici della equazione caratteristica sono
date dalle:
c1 = u + gH , c 2 = u − gH , c3 = c 4 = u
(30)
in cui u è il valore di velocità comune alle due correnti e H la somma delle profondità delle due
correnti.
Le equazioni (27) vengono notevolmente semplificate imponendo che la somma delle profondità sia
costante rispetto al tempo ed allo spazio: h1 + h2 = H (ipotesi ragionevole in quasi tutti i casi di
interesse tecnico). Infatti, sommando le prime due equazioni (27) si ottiene:
∂
(h1 + h2 ) + ∂ (h1U 1 + h2U 2 ) = ∂ (h1U 1 + h2U 2 ) = 0 ⇒ h1U 1 + h2U 2 = cos t = q
∂t
∂x
∂x
(31)
La condizione (31), unitamente all’ipotesi h1 + h2 = H , permette di definire le grandezze dello
strato superiore in funzione di quelle inferiore:
h2 = H − h1
q − h1U1
U 2 = H − h
1
(32)
Di conseguenza la seconda e quarta equazione (27) possono essere scartate, mentre la prima e la
terza assumono la forma:
∂h1
∂U1
∂h1
∂t + U1 ∂x + h1 ∂x = 0
∂U1 + U1 ∂U1 + g 1 − ρ 2 ∂h1 = gi f − F1 − FI
ρ ∂x
∂t
∂x
ρ1h1 ρ1h1
1
(33)
Il sistema di equazioni (33) possiede le seguenti direzioni caratteristiche:
ρ
ρ
c1 = u + g 1 − 2 h1 , c 2 = u − g 1 − 2 h1
ρ1
ρ1
(34)
178
esprimenti le celerità delle perturbazioni sulla superficie di separazione, identiche a quelle che
avrebbe una corrente a superficie libera con profondità h1 in un sistema di riferimento con
ρ
accelerazione di gravità pari a: g 1 − 2 .
ρ1
Le configurazioni di moto permanente si possono studiare annullando le derivate temporali nelle
(33); di conseguenza, dalla prima delle due equazioni (33), si ottiene:
∂
(h1U1 ) = 0 ⇒ h1U1 = q1
∂x
(35)
Dalla seconda delle due equazioni (33), si ottiene invece l’equazione per la determinazione del
profilo della corrente pesante h1 :
q12
F
− I
3
dh1
h1 ρ1 h1
=
dx
ρ q2
g 1 − 2 − 13
ρ1 h1
gi f − λ1
(36)
in cui lo sforzo FI , esercitato tra le due superfici, può essere espresso tramite la (25):
FI = ρ1
λ I 12
8
(U 1 − U 2 )
2
= ρ1
λ I 12 q1 H − qh1
2
8 h1 (H − h1 )
(37)
oppure, in prima approssimazione, può essere trascurato.
q12
= 1 , ossia quando il numero di
ρ2 3
h1
g 1 −
ρ1
Richardson della corrente densa è unitario: il numero di Richardson assume pertanto lo stesso ruolo
svolto dal numero di Froude nelle correnti a superficie libera. Si possono pertanto distinguere le
q12
> 1 e le correnti dense lente, se si
correnti dense veloci, se si verifica la condizione:
ρ2 3
g 1 − h1
ρ1
2
q1
verifica la condizione:
< 1 . I corrispondenti profili della corrente densa si ottengono
ρ2 3
h1
g 1 −
ρ1
integrando la (36), avendo attribuito opportuni valori ai coefficienti di resistenza e alla portata
volumetrica di corrente densa per unità di larghezza.
Si mostrano in particolare i risultati relativi ad una corrente densa che risale un alveo rettangolare
larghissimo, con pendenza pari a: i f =0.001, portata densa q1 = 10m 3 s −1 , indice di resistenza
Si nota subito che la condizione critica si ha per
λ = 0.02 , densità della corrente densa e dell’acqua: ρ1 = 1040 Kgm −3 , ρ 2 = 1000 Kgm −3 , profondità
nella sezione di imbocco della corrente densa: H=8 m. In figura 7 il profilo della corrente densa
risale l’alveo in contropendenza e gradualmente diminuisce lo spessore, fino ad arrivare alla sezione
posta in x=11.17 m, in cui la corrente raggiunge lo stato critico. Tale fatto è posto in evidenza dal
diagramma riportato in figura 8, in cui si mostra l’andamento dell’inverso del numero di
179
Richardson:
1
q12
in funzione dell’ascissa della corrente: si vede come il parametro
=
Ri
ρ2 3
g 1 − h1
ρ1
1
parta dal valore 0.5 per risalire fino al valore unitario, che viene raggiunto nella sezione posta in
Ri
x=11.17 m.
Figura 7. Andamento del profilo della corrente densa
Fig. 8. Andamento del parametro 1/Ri
L’esempio mostra come sia possibile ottenere risultati di potenziale interesse tecnico: è infatti
importante, ad esempio per l’utilizzazione delle risorse idriche a fini irrigui, poter stabilire con
approssimazione accettabile la posizione del cuneo salino in funzione dei dati macroscopici a
disposizione: pendenza dell’alveo, scabrezza dell’alveo, densità della corrente densa e leggera,
portata e profondità iniziale della corrente densa. Queste ultime due grandezze possono ovviamente
180
essere solo stimate o dedotte dall’osservazione sperimentale. Si può attribuire un valore alla portata
della corrente densa, facendo riferimento al caso di una corrente di densità generata presso
l’estuario di un corso d’acqua dolce, valutando le velocità delle correnti di marea nella sezione di
sbocco a mare. Il valore dell’altezza iniziale della corrente è invece un parametro di più difficile
determinazione e può essere determinato esclusivamente per via sperimentale.
181
Capitolo X. Caratterizzazione sperimentale della turbolenza.
Premessa
L’approccio sperimentale è stato ed è fondamentale nello studio della turbolenza. Le più importanti
scoperte riguardanti i flussi turbolenti sono state fatte proprio grazie alla attività sperimentale.
Inoltre, sebbene lo sviluppo di calcolatori con crescenti risorse di calcolo renda la simulazione
numerica diretta sempre più praticabile, con la conseguente possibilità di avere a disposizione una
sorta di laboratorio virtuale in grado di fornire una quantità di dati sperimentali impensabile rispetto
a quella ottenibile in un laboratorio reale, l’attività sperimentale vera e propria resta indispensabile
per verificare i dati numerici, per studiare e comprendere la turbolenza di particolari configurazioni
e nella modellazione del comportamento dei flussi di interesse pratico, la cui complessità è ben
lontana dal poter essere descritta numericamente.
Nello studio dei flussi turbolenti, l’attività sperimentale può avere finalità e presentare realizzazioni
tecniche molto diverse tra loro. E’ possibile distinguere innanzitutto una attività sperimentale volta
alla realizzazione di misurazioni quantitative di determinate grandezze (principalmente velocità e
pressioni) ed una attività sperimentale volta alla realizzazione di visualizzazioni dei flussi. Il primo
tipo di attività sperimentale viene effettuato facendo interagire uno strumento di misura con il
flusso, il secondo tipo viene effettuato realizzando una ripresa cinematografica del flusso, realizzato
nel modo più opportuno. Originariamente il secondo tipo di tecnica sperimentale veniva usato
principalmente per descrivere qualitativamente i flussi. Allo stato attuale, lo sviluppo raggiunto
dalle tecniche di ripresa cinematografica e dalle tecniche di analisi di immagine, fa sì che anche il
secondo tipo di tecnica sperimentale sia sfruttato per ottenere informazioni quantitative sui flussi
turbolenti. Si deve sottolineare il fatto che la descrizione qualitativa dei flussi non deve essere
sottovalutata rispetto alla misurazione quantitativa delle singole grandezze. La quasi totalità delle
recenti scoperte sul comportamento dei flussi turbolenti sono state effettuate proprio grazie alla
semplice osservazione qualitativa dei flussi.
Il presente capitolo è strutturato sulla base della distinzione sopra introdotta. In altre parole, dopo
una esposizione sintetica di richiami sulle tecniche di elaborazione dei dati sperimentali, verranno
descritte separatamente le principali grandezze e tecniche di misura realizzabili con i due tipi di
attività sperimentale.
Richiami sulle tecniche di elaborazione dei dati sperimentali.
Richiami di statistica applicata.
Consideriamo un esperimento condotto in condizioni di moto turbolento, il cui risultato sia la
misura di una componente di velocità u in un determinato punto occupato dal dominio del moto,
effettuata per un certo intervallo di tempo. Ipotizziamo che il dato sperimentale u sia statisticamente
stazionario. Possiamo pertanto adottare le medie temporali e decomporre la u nella somma di un
valore medio e di uno scarto rispetto a tale valore medio:
u = U + u'
(1)
lo scarto u' presenta un andamento irregolare, imprevedibile e può essere considerata una variabile
aleatoria. E’ possibile associare allo scarto u' una funzione densità di probabilità p (u' ) tale che il
prodotto p (u' )du' rappresenti la probabilità che la variabile aleatoria u' assuma il valore compreso
tra u' e u' + du' . La probabilità P che la variabile aleatoria assuma un valore compreso in un intervallo
finito − u' 0 ≤ u' ≤ u' 0 sarà pertanto data da:
182
u' 0
P(u' 0 ) =
∫ p(u' )du'
(2)
− u' 0
La deduzione della funzione densità di probabilità p (u' ) è un operazione molto semplice dal punto di
vista concettuale. Facendo riferimento alla figura (1), in cui viene riportato un andamento temporale
di uno scarto di velocità, si deve dividere l’intervallo dei valori assunti dallo scarto in parti uguali di
ampiezza pari a ∆u' . Successivamente, considerato un intervallo di valori della u' compresi tra
(k −1)∆u' e k∆u' , si deve quantificare l’intervallo di tempo durante il quale la variabile aleatoria
assume valori compresi in quell’intervallo. Detto τ k tale intervallo e T la durata dell’esperimento, il
rapporto:
τk
fornisce una stima approssimata della probabilità che la variabile u' assuma valori
T
compresi tra (k −1)∆u' e k∆u' . Di conseguenza, il valore corrispondente della funzione densità di
τk
. Si intuisce come l’approssimazione migliori all’aumentare della durata
T∆u'
dell’esperimento e al diminuire del ∆u' .
u’
probabilità è dato da:
T
3∆u’
2∆u’
∆u’
0
t
−∆u’
−2∆u’
−3∆u’
Figura 1. Andamento temporale dello scarto di velocità.
In figura 1, l’intervallo τ 3 durante il quale lo scarto assume valori compresi tra 2∆u' e 3∆u' è dato
dalla somma dei due intervallini evidenziati dalle doppie frecce. Naturalmente la somma di tutti i
τ k eguaglia la durata totale dell’esperimento. Tale condizione può essere espressa facendo
riferimento alla stima della densità di probabilità:
τk
∑ T∆u' ∆u' = 1
(2)
k
183
∞
Praticamente la (2) è la versione approssimata della condizione integrale:
∫ p(u' )du' = 1
che
−∞
esprime il fatto che la probabilità che la variabile aleatoria assuma un valore reale deve essere pari
ad 1, ossia l’evento è certo. Supponendo di conoscere la funzione di densità di probabilità associata
all’evento in considerazione, possiamo definire il valore atteso o medio della variabile aleatoria:
∞
u' = ∫ u' p(u' )du'
(3)
−∞
Il valore atteso dello scarto di velocità è nullo. Infatti, approssimando l’integrale (3) con una
sommatoria si ha:
∑ u'
k
k
1
τk
∆u' = ∑ u' k τ k
T k
T∆u'
(4)
in cui u' k è il valore medio assunto dallo scarto di velocità nell’intervallo di tempo τ k . La
sommatoria si compone di prodotti positivi e negativi, che sommandosi danno risultato nullo.
Il valore atteso della velocità u coincide ovviamente con il valore medio U introdotto sopra.
Si definisce scarto quadratico medio la quantità:
∞
σ = ∫ u' 2 p(u' )du'
2
(5)
−∞
Il rapporto della radice quadrata dello scarto quadratico medio alla velocità media viene definito
intensità turbolenta I u relativa alla componente di velocità u:
u' 2
Iu =
(6)
U
Si definisce momento statistico di ordine n la quantità:
∞
µ n = ∫ u' n p(u' )du'
(7)
−∞
I momenti statistici dipendono dalla particolare distribuzione adottata. La distribuzione di
probabilità gaussiana:
p(u' ) =
1
2π σ
e
1 u'
−
2 σ
2
(8)
è tale da rendere nulli tutti i momenti statistici dispari. Normalmente si considerano, oltre al
momento statistico del secondo ordine (scarto quadratico medio), i momenti statistici del terzo e
quarto ordine (skewness e kurtosis) i quali danno indicazioni rispettivamente sulla simmetria della
funzione densità di probabilità rispetto al valor medio e sulla “larghezza” della funzione densità di
probabilità. In figura 2a vengono confrontate una funzione densità di probabilità gaussiana, dunque
con skewness nullo e pertanto simmetrica, e una funzione densità di probabilità non gaussiana, con
184
skewness non nullo e pertanto asimmetrica. In figura 2b viene messo in luce l’effetto della kurtosis:
all’aumentare della kurtosis la funzione densità di probabilità diventa più “magra” attorno al valore
atteso.
p(u’)
skewness nullo
skewness non nullo
u’
Figura 2a. Confronto tra due curve di densità di probabilità con differente valore di skewness
p(u’)
kurtosis piccola
kurtosis grande
u’
Figura 2b. Confronto tra due curve di densità di probabilità con differente valore di kurtosis
Analogamente a quanto visto sopra, si possono definire le funzioni densità di probabilità di più
variabili aleatorie o funzioni di densità di probabilità congiunte. Nello studio sperimentale della
turbolenza ha interesse la definizione della densità di probabilità di due variabili aleatorie
congiunte: b(u' , v' ) . Quest’ultima è definita nel modo seguente: b(u' , v' )du' dv' rappresenta la
185
probabilità congiunta che le variabili aleatorie u' , v' assumano valori appartenenti agli intervalli
[u' ,u' + du' ],[v' ,v' + dv' ]. Le funzioni di densità di probabilità di più variabili aleatorie permettono la
definizione di momenti statistici misti. Facendo riferimento alla funzione di due variabili si possono
definire i momenti statistici del tipo:
µ mn =
∞ ∞
∫ ∫ u'
m
v' n b(u' ,v' )du' dv'
(9)
− ∞− ∞
Di particolare interesse risultano i seguenti:
00 ∞ ∞
µ = ∫ ∫ b(u' , v' )du' dv' = 1
− ∞− ∞
∞ ∞
µ 10 = ∫ ∫ u' b(u' , v' )du' dv' = 0
− ∞− ∞
∞ ∞
µ 01 =
∫ ∫ v' b(u' ,v' )du' dv' = 0
− ∞− ∞
∞ ∞
µ 11 =
∫−∞−∫∞u' v' b(u' ,v' )du' dv' = u' v'
20 ∞ ∞ 2
2
µ = ∫ ∫ u' b(u' , v' )du' dv' = σ u'
− ∞− ∞
∞ ∞
µ 02 = ∫ ∫ v' 2 b(u' , v' )du' dv' = σ v2'
− ∞− ∞
(10)
Il primo è la condizione di congruenza sulla funzione densità di probabilità, il secondo e il terzo il
valore medio degli scarti, il quarto è il momento statistico misto del primo ordine o correlazione tra
le due variabili aleatorie. Il quinto e il sesto sono gli scarti quadratici medi relativi alle singole
variabili aleatorie.
L’integrale di una funzione densità di probabilità di più variabili aleatorie rispetto ad una variabile,
fornisce la probabilità congiunta delle restanti variabili. Infatti, integrando rispetto ad una variabile,
è come se si eliminasse l’aleatorietà rispetto a quella variabile, in quanto si ritiene certo che tale
variabile assuma valori appartenenti all’asse reale. Limitandosi al caso di due variabili si ha:
∞
pu' (u' ) = ∫ b(u' ,v' )dv'
−∞
∞
p (v' ) = b(u' ,v' )du'
∫
v'
−∞
(11)
Ossia integrando su tutto l’asse reale rispetto ad una variabile si ottiene la densità di probabilità
della restante variabile aleatoria.
La legge di densità di probabilità gaussiana può essere estesa anche al caso di due variabili
aleatorie:
186
b(u' ,v' ) =
1
2π σ u2' σ v2' − µ 11
−
e
u'
σ u2' σ v2'
v'
µ 11
u' v'
+
−2
2 σ u2' σ v2' − µ 11 σ u2' σ v2' σ u2' σ v2'
(
)
(12)
Se vale la seguente proprietà:
b(u' ,v' ) = pu' (u' ) p v' (v' )
(13)
le due variabili aleatorie si dicono statisticamente indipendenti. L’indipendenza statistica è una
proprietà importante che semplifica soprattutto il calcolo della probabilità condizionata, ossia della
probabilità che una variabile ricada in un dato intervallo dato un valore fissato dell’altra. Ad
esempio, la probabilità b(u' v' ) che la u' assuma un valore compreso nell’intervallo [u' ,u' + du' ] ,dato
v' , è data da:
b(u' v' ) =
b(u' ,v' )
p v' (v' )
(14)
Dunque se le variabili aleatorie sono statisticamente indipendenti, tale probabilità coincide
praticamente con la pu' (u' ) . Se le due variabili aleatorie sono statisticamente indipendenti, il
momento statistico µ 11 è nullo e se la funzione di densità di probabilità è data dalla (12), si
semplifica nel prodotto delle gaussiane relative alle due variabili.
Il fatto che la dipendenza statistica tra variabili aleatorie sia legata al grado di correlazione esistente
tra tali variabili può essere illustrato dal seguente ragionamento. Si consideri un insieme di dati
costituito da due grandezze u' ,v' (in pratica si hanno due colonne di N dati ciascuna) e si voglia
valutare la loro correlazione, ipotizzando l’esistenza di un legame lineare tra di esse, ossia
l’esistenza di una retta di regressione:
v' = m u'
(15)
Per caratterizzare tale legame è necessario calcolare gli scarti del dato sperimentale v' rispetto a
quello predetto m u' , sommarne i quadrati e minimizzare il risultato rispetto al parametro incognito
m:
1 N
1 N 2 2m N
m2 N 2
2
u' i
∑ v' i u' i + N ∑
E = ∑ (v' i −m u' i ) = ∑ v' i −
N i =1
N i =1
N i =1
i =1
1 N
∑ v' i u' i µ 11
N
2m N 2
N i =1
dE = − 2
≈ 2
u' i = 0 ⇒ m =
∑ v' i u' i + N ∑
dm
1 N 2
N i =1
σ u'
i =1
u' i
∑
N i =1
(16)
D’altra parte si potrebbe ipotizzare un legame lineare del tipo:
u' = q v'
(17)
e il medesimo ragionamento porterebbe alla espressione:
187
1 N
1 N 2 2q N
q2 N 2
2
v' i
∑ v' i u' i + N ∑
E = ∑ (u' i − q v' i ) = ∑ u' i −
N i =1
N i =1
N i =1
i =1
1 N
∑ v' i u' i µ 11
N
2q N 2
N i =1
dE = − 2
≈ 2
v' i = 0 ⇒ q =
∑ v' i u' i + N ∑
dq
1 N 2
N i =1
σ v'
i =1
v' i
∑
N i =1
(18)
Dunque si vede che se µ 11 è nullo i dati sono statisticamente indipendenti e sia le rette v' i = 0 che le
rette u' i = 0 sono di regressione: pertanto non vi può essere correlazione tra le due variabili. La
( )
2
1
µ 11
correlazione è invece massima se: m = ⇒ mq = 1 ⇒ 2 2 = ρ u' v' = 1 , in tal caso le due rette di
q
σ v' σ u'
regressione (15), (17) coincidono e i dati non sono statisticamente indipendenti.
Richiami di analisi dei segnali.
Data una funzione del tempo u=u(t) o segnale, si definisce trasformata di Fourier di u la quantità:
+∞
U ( f ) = ∫ u (t )e − I 2πft dt
(19)
−∞
+∞
che può essere calcolata se
∫ u(t ) dt < ∞ .
Tale condizione (sommabilità della funzione u(t)) è
−∞
soddisfatta in genere da funzioni che tendono a zero al tendere di t all’infinito.
La U ( f ) è una funzione complessa della frequenza f. La trasformazione (19) praticamente permette
di evidenziare i contributi in frequenza che compongono il segnale. Quest’ultimo infatti può essere
visto come la media pesata di infinite armoniche a frequenza f, come viene mostrato dall’inversa
della (19):
+∞
u (t ) = ∫ U ( f )e I 2πft df
(20)
−∞
essendo la funzione peso la funzione trigonometrica e I 2πft . Mettendo in evidenza nella (19) la parte
reale e la parte complessa nella funzione esponenziale e I 2πft si ottiene la:
+∞
+∞
U ( f ) = ∫ u (t ) cos(2πft )dt − I ∫ u (t ) sin(2πft )dt
−∞
(21)
−∞
pertanto, se il segnale u(t) è una funzione pari, la trasformata di Fourier coincide con la sua parte
reale, se u(t) è una funzione dispari la trasformata di Fourier coincide con la sua parte immaginaria.
Il modulo della trasformata di Fourier del segnale u(t), U ( f ) è definito spettro del segnale.
Dal punto di vista computazionale, la trasformata di Fourier viene applicata a segnali che vengono
registrati per un intervallo di tempo T finito. In tal modo anche a segnali non sommabili è possibile
applicare la trasformata di Fourier: si definisce infatti il segnale su tutto l’asse reale, attribuendogli
un valore nullo per t>T e t<t0, essendo t0 l’istante di inizio della acquisizione.
188
Inoltre il segnale non viene acquisito con continuità ma campionato, ossia viene acquisito ogni ∆T
secondi. Si ottiene cioè una serie di N dati ui (i=1,N) distaccati l’uno dall’altro di un intervallo di
tempo ∆T. L’intervallo totale di acquisizione del segnale ha perciò una durata totale pari a T=N ∆T .
La trasformata di Fourier può essere calcolata semplicemente applicando la formula (21),
opportunamente discretizzata, tenendo conto del fatto che anche la frequenza f è una variabile, che
k
viene descritta in modo discreto tramite la: f k = k∆f = , ossia come multiplo della frequenza
T
fondamentale, pari all’inverso dell’intervallo di acquisizione. La frequenza fondamentale
praticamente indica qual è la risoluzione in frequenza: in altre parole, maggiore è la durata
dell’acquisizione, maggiore è la risoluzione in frequenza, ossia maggiore è il dettaglio con cui
potremo descrivere il segnale nel dominio delle frequenze.
La trasformata di Fourier può dunque essere approssimata dalla seguente formula, approssimando
gli integrali con la formula dei rettangoli:
+∞
+∞
N
N
k
k
i∆t ∆t − I ∑ ui sin 2π
i∆t ∆t =
U ( f ) = ∫ u (t ) cos(2πft )dt − I ∫ u (t ) sin(2πft )dt ≈ ∑ ui cos 2π
N∆t
N∆t
i =1
i =1
−∞
−∞
N
2πk
2πk
u
cos
i
∆
t
−
I
ui sin
i ∆t
∑
∑
i
N
N
i =1
i =1
N
(22)
In particolare la parte reale e la parte immaginaria della trasformata approssimata sono date dalla:
N
2πk
[
]
Re
U
u i cos
i ∆t
=
∑
k
N
i =1
N
Im[U ] = − u sin 2πk i ∆t
∑
k
i
N
i =1
(23)
Una proprietà interessante della trasformata approssimata o discrete Fourier transform (DFT) viene
N ~
dedotta facilmente calcolando gli argomenti delle funzioni trigonometriche (23), per k = ± k . Si
2
~
2πk
2πk
i . Pertanto le funzioni trigonometriche diventano:
ottiene:
i = π ±
N
N
~
2πk
2πk
i
i
i = (− 1) cos
cos
N
N
~
2πk
2πk
i
sin N i = ±(− 1) sin N i
(24)
N
, la parte reale della trasformata fornisce un contributo
2
simmetrico, la parte immaginaria, antisimmetrico. Di conseguenza, lo spettro del segnale, ossia il
modulo del numero complesso con parte reale e immaginaria date rispettivamente dalle (23), è
N
simmetrico rispetto a k = ed è possibile limitarsi a considerare lo spettro fino a tale multiplo
2
ossia per un fissato i e rispetto a k =
189
1
N
è dunque la massima
=
2 N∆t 2∆t
frequenza alla quale si può arrivare per ottenere una descrizione utile dello spettro approssimato del
segnale. E’ anche detta frequenza di aliasing. Pertanto, se si vogliono visualizzare i contributi
spettrali con frequenze almeno pari a tale frequenza, si deve campionare il segnale con un intervallo
1
temporale non superiore a: ∆t =
. Consideriamo ora alcune proprietà notevoli della
2 f Max
trasformata di Fourier.
della fondamentale. La frequenza individuata da: f Max =
1. Trasformata di un segnale armonico. Sia dato un segnale armonico u (t ) = u0 sin(2πf 0t ) ,
evidentemente non sommabile e cui, a rigore, non potrebbe essere applicata la trasformata di
Fourier.
Consideriamo
comunque
l’integrale:
T
I 2πfT
− I 2πft
− I 2πfT f cos (2πf 0T ) + If sin(2πf 0T ) − f 0 e
. In figura 3a-c è
2
2
∫−T u0 sin(2πf 0t )e dt = u0e 0
2π ( f − f 0 )
diagrammato l’andamento del modulo di tale integrale al crescere di T, per f 0 = 1 .
Figura 3a. Spettro del segnale armonico. T=2.
Figura 3b. Spettro del segnale armonico. T=10.
190
Figura 3c. Spettro del segnale armonico. T=20.
In pratica si vede che al crescere di T i picchi centrati attorno alla frequenza f 0 = ±1 aumentano
d’intensità e si restringono. Al tendere di T all’infinito, l’integrale tende alla trasformata di
Fourier del segnale armonico e i picchi tendono a diventare delle linee di spessore nullo e di
intensità infinita in corrispondenza di f 0 = 1 . Funzioni siffatte (nulle ovunque e infinite in un
solo punto) sono le ben note δ di Dirac. Formalmente si può pertanto porre:
∞
∫u
0
sin(2πf 0t )e − I 2πft dt = − I (δ ( f − f 0 ) − δ ( f + f 0 ))
(25)
−∞
Tale risultato esprime il fatto che tutto il contenuto in frequenza della funzione armonica si ha in
corrispondenza di f = f 0 .
2. Trasformata di un segnale impulsivo. Si consideri un segnale costituito da una funzione δ di
Dirac del tempo: u (t ) = δ (t ) . Tale segnale è un impulso, di intensità infinita, dato nell’istante
t=0. La sua trasformata di Fourier, date le proprietà della funzione di Dirac, è data dalla:
∞
∫ δ (t )e
− I 2πft
dt = e − I 2πf 0 = 1
(26)
−∞
Ossia dalla funzione costante. Ciò vuol dire che il contenuto in frequenza dell’impulso è costituito
da tutte le frequenze possibili. Si noti il dualismo funzione armonica-impulso: ad una funzione
armonica nel dominio del tempo corrisponde un impulso nel dominio delle frequenze e ad un
impulso temporale corrisponde una funzione costante nel dominio delle frequenze. Lo spettro di un
segnale fornisce informazioni sul grado di determinismo del segnale stesso: se è a banda stretta,
ossia se il contenuto in frequenza è concentrato attorno a picchi ben determinati, il processo può
essere considerato praticamente deterministico, se è a banda larga, ossia se il contenuto in frequenza
è distribuito più o meno uniformemente su tutto l’asse reale, il processo è sostanzialmente nondeterministico. In tal senso la funzione armonica nel tempo rappresenta il segnale deterministico per
eccellenza, mentre l’impulso nel tempo rappresenta il segnale completamente non deterministico.
3. Trasformata del prodotto di due funzioni. Teorema di Parseval. Densità spettrale di
potenza.
Consideriamo due funzioni u=u(t), v=v(t). Il loro prodotto è una funzione w=w(t)=u(t)v(t) e ad essa
può essere applicata la trasformata di Fourier:
191
∞
W(f )=
∫ w(t )e
− I 2πft
(27)
dt
−∞
Si può dimostrare che:
W(f )=
∞
∞
−∞
−∞
− I 2πft
∫ w(t )e dt = ∫ U ( f - h )V * (h )dh
(28)
ossia la trasformata del prodotto di due funzioni è pari alla convoluzione delle trasformate. Nella
(28) U ( f ),V * ( f ) sono rispettivamente la trasformata di Fourier della funzione u e la complessa
coniugata della trasformata di Fourier della funzione v. Consideriamo l’integrale:
∞
P = ∫ u 2 (t )dt
(29)
−∞
Si può dimostrare che vale la seguente identità (Teorema di Parseval):
∞
∞
P = ∫ u (t )dt = ∫ U ( f )U * ( f )df
2
−∞
(30)
−∞
L’integrale P è anche detto potenza del segnale. Il teorema di Parseval afferma che la potenza del
segnale è la medesima se espressa nel dominio del tempo o della frequenza.
Consideriamo ora la funzione di correlazione di due segnali:
Ruv (t ) =
T
1
u (τ )v(t + τ )dτ
T ∫0
(31)
Si definisce densità spettrale di potenza, la trasformata di Fourier della funzione di correlazione:
∞
− I 2πft
dt
S uv ( f ) = ∫ Ruv (t )e
−∞
∞
R (t ) = S ( f )e I 2πft df
∫ uv
uv
−∞
(32)
Dalla seconda delle (32), per t=0, si trae la seguente conseguenza:
Ruv (0 ) =
T
∞
1
u (τ )v(τ )dτ = ∫ S uv ( f )df
T ∫0
−∞
(33)
il prodotto della densità spettrale di potenza per il differenziale df rappresenta dunque il contributo
in frequenza compreso tra f e f+df della funzione di correlazione. Tale proprietà risulterà di estremo
interesse nella misura dello spettro della energia cinetica turbolenta.
Le trasformate di Fourier naturalmente possono essere definite su un dominio spaziale. Si consideri
infatti una funzione u=u(x). Sotto opportune ipotesi, vale la seguente definizione di trasformata di
Fourier spaziale:
192
∞
− Ikx
U (k ) = ∫ u ( x )e dx
−∞
∞
u ( x ) = 1 U (k )e Ikx dk
2π −∫∞
(34)
In questo caso, al posto della frequenza spaziale f x , dimensionalmente omogenea all’inverso di una
lunghezza, si preferisce far comparire il numero d’onda k = 2πf x . Per tale motivo,
1
nell’antitrasformata di Fourier compare il fattore di proporzionalità:
. Le trasformate di Fourier
2π
spaziali possono essere anche estese sullo spazio tridimensionale. In conseguenza di ciò, il numero
d’onda diviene un vettore d’onda, con le relative componenti, e la definizione (34) si modifica
nella:
∞ ∞ ∞
(
)
k
,
k
,
k
u ( x1 , x 2 , x3 )e − Ik ⋅x dx1 dx 2 dx3
U
=
1
2
3
∫
∫
∫
− ∞− ∞− ∞
∞ ∞ ∞
u ( x , x , x ) = 1
U (k1 , k 2 , k 3 )e Ik ⋅x dk1 dk 2 dk 3
3 ∫ ∫ ∫
1 2 3
(2π ) −∞−∞−∞
(35)
in cui i vettori k, x hanno componenti rispettivamente pari a: k ≡ k1 , k 2 , k 3 , x ≡ x1 , x 2 , x3 .
Grandezze riconducibili a misure di velocità
Dalle misure dei campi di velocità si possono ottenere una serie di grandezze ad essi collegate. Le
più importanti sono:
1.
2.
3.
4.
5.
6.
7.
8.
profili di velocità media;
sforzi di Reynolds;
velocità di attrito;
energia cinetica media e turbolenta media;
tensore di correlazione;
spettri;
funzioni di dissipazione e produzione;
scale spaziali e temporali;
1. Profili di velocità media
Dalle misure di una componente di velocità effettuate in un punto è immediato risalire alla velocità
media tramite la formula:
U=
1
N
N
∑u
i =1
(36)
i
Il risultato di una misura di velocità sarà infatti un vettore di N componenti ui, cioè un insieme di N
valori della componente u, campionati ogni ∆t secondi, il cui valore medio è dato dalla (36).
Realizzando tali misure per una serie di punti allineati su una data direzione, si ottiene il profilo
della componente di velocità media secondo la direzione voluta. Il tempo totale di acquisizione
193
dipende dal fenomeno in studio: deve ovviamente essere sufficientemente grande da non
influenzare il risultato della misura, supponendo di operare in condizioni stazionarie.
2. Sforzi di Reynolds
Dalla definizione (36) si possono definire immediatamente gli scarti di velocità per la componente
u:
u' i = u i − U
(37)
e di conseguenza lo sforzo di Reynolds relativo alla medesima componente:
τ xxR =
ρ
N
∑ (u' )
N
2
i
i =1
=
ρ
N
∑ (u
N
i =1
−U )
2
i
(38)
Supponendo di misurare contemporaneamente anche la componente v, si ottiene lo sforzo di
Reynolds relativo alle due componenti di velocità u,v:
τ xyR =
ρ
N
∑ u' v'
N
i =1
i
i
=
ρ
N
∑ (u
N
i =1
i
− U )(vi − V )
(39)
3. Velocità d’attrito.
La velocità d’attrito può essere misurata facendo riferimento a diverse definizioni, tra le quali si
possono ricordare le seguenti:
u*
u*
u*
−
u*
= gℜJ
U (y)
1
yu
log * + As
κ
ν
U (y)
=
1
y
log + Ar
κ
d
dU
y
u' v' + ν
= u*2 1 −
dy
h
=
=
(40)
τ
ρ
La prima non richiede misure di velocità, ma semplicemente la conoscenza del raggio idraulico e
della pendenza piezometrica della corrente. Nel caso delle correnti a superficie libera in moto
uniforme, tale pendenza coincide con quella del fondo.
La seconda e la terza, valide rispettivamente per correnti a contatto con pareti lisce e scabre, con
scabrezza d, richiedono la misura del profilo di velocità, che si suppone logaritmico. In altre parole,
si effettua la misura del profilo di velocità nella zona di validità del profilo logaritmico, applicando
la definizione (40) si ricava il valore della velocità d’attrito. Nel caso di fondo scabro, la formula
risulta particolarmente agevole da usare, in quanto fornisce esplicitamente il valore della velocità
d’attrito, previa conoscenza della scabrezza della parete.
194
La quarta formula, valida nel moto uniforme, richiede la misura del profilo di velocità media e dello
sforzo di Reynolds. y rappresenta la distanza dalla parete, mentre h assume un significato differente
a seconda del contesto: nelle correnti a superficie libera rappresenta la profondità della corrente,
nelle correnti in pressione il raggio della condotta. Infine la quinta formula prevede una misura
dello sforzo di fondo, tramite un opportuno sensore di sforzo.
4. Energia cinetica media e turbolenta media.
Supponendo di aver misurato le tre componenti di velocità e di aver ottenuto i rispettivi valori medi,
l’energia cinetica media è semplicemente calcolata tramite la formula:
K=
ρ
2
3
∑U
i =1
2
i
(41)
Per quanto riguarda l’energia cinetica turbolenta media, vale la seguente definizione:
K =
ρ
3
∑
2
i =1
u' i2 =
ρ
∑∑ (u
2N
3
N
i =1 j =1
−Ui )
2
ij
(42)
Per poterla applicare gli scarti di velocità per ogni istante di tempo e per ogni componente devono
essere calcolati, quadrati e mediati rispetto all’intervallo di tempo totale della misura. Infine si
devono sommare tali valori mediati rispetto alla componente.
5. Tensore di correlazione.
Il tensore di correlazione si definisce nel modo seguente:
Rij (r ) = u i ' (x ,t )u j ' (x + r ,t )
i = x, y, z ,
j = x, y, z
(43)
Dunque, da un punto di vista operativo:
Rij (r ) =
1
N
∑ (u (x) − U (x))(u (x + r ) − U (x + r ))
N
k =1
ik
i
jk
j
i = x, y, z ,
j = x, y, z
(44)
ossia si calcolano prima gli scarti di velocità in corrispondenza ad ogni istante, rispettivamente per
le componenti ima e jma nelle posizioni individuate dai vettori x e x+r e successivamente si mediano
rispetto al tempo. Il problema della misura sperimentale del tensore di correlazione consiste
nell’elevato numero di strumenti di misura che si dovrebbe avere a disposizione da impiegare
contemporaneamente. Infatti, volendo dare una descrizione accurata della dipendenza spaziale del
tensore di correlazione, si deve individuare una rosa di punti attorno al punto origine x, ottenuti al
variare del vettore r, ed effettuare la misura delle componenti di velocità
u i ,u j contemporaneamente in tali punti. Successivamente, applicando la formula (44) in ciascuno
dei punti di misura, si ottiene il valore sperimentale del tensore di correlazione. In mancanza di un
adeguato apparato sperimentale, si può far riferimento ad una configurazione minima, consistente
nella misura contemporanea di due componenti di velocità u i ,u j rispettivamente nel punto origine x
e nel punto x+r1. Successivamente, ripetendo la prova sperimentale in condizioni identiche, si
effettua la misura nel punto origine x e nel punto x+r2, e così via, fino ad aver eseguito la prova
sperimentale M volte in condizioni identiche e ad aver cosi’ determinato il tensore di correlazione
negli M punti, descritti dal vettore ri (i=1,…,M). Tale procedura è lecita solo se la prova
195
sperimentale riproduce un fenomeno di turbolenza stazionaria e si è praticamente certi di eseguire la
prova nelle medesime condizioni, altrimenti la misura sperimentale perde ogni significato.
6. Spettri.
La coppia trasformata-antitraformata di Fourier spaziale del tensore di correlazione è data dalle
formule:
+∞ +∞ +∞
− Ik x x − Ik y y − Ik z z
e dxdydz
ϕ ij (k x , k y , k z ) = ∫ ∫ ∫ Rij ( x , y , z )e e
− ∞ − ∞ −∞
+ ∞ + ∞+ ∞
Ik y
R (x , y , z ) = 1
ϕ (k x , k y , k z )e Ik x x e y e Ik z z dk x dk y dk z
3 ∫ ∫ ∫ ij
ij
(2π ) −∞−∞−∞
(45)
Dal punto di vista sperimentale ha senso considerare il tensore di correlazione e il suo spettro in casi
particolari, corrispondenti a particolari realizzazioni sperimentali. Ad esempio, nel caso in cui vi sia
una direzione predominante del moto, definendo il vettore r tramite la sola componente di
spostamento secondo la direzione del moto, si caratterizza la dipendenza del tensore di correlazione
da quella componente di spostamento e, di conseguenza, le formule (45) si semplificano:
+∞ +∞ +∞
(
)
ϕ
0
0
=
k
,
,
Rij ( x ,0,0)e − Ik x x dxdydz
ij x
∫
∫
∫
−∞−∞−∞
+ ∞+ ∞ + ∞
R ( x ,0,0) = 1
ϕ (k x ,0 ,0)e Ik x x dk x dk y dk z
3 ∫ ∫ ∫ ij
ij
(2π ) −∞−∞−∞
(46)
In r=0 le componenti del tensore di correlazione coincidono con le componenti del tensore di
Reynolds. In tale posizione la antitrasformata di Fourier dello spettro del tensore di correlazione è
data dall’espressione:
Rij (0 ,0,0) =
1
+∞ +∞ +∞
ϕ ij (k x , k y , k z )dk x dk y dk z
(2π )3 −∫∞−∫∞−∫∞
(47)
E’ utile considerare il tensore di correlazione e il relativo spettro, mediati su superfici sferiche di
raggio r ( r = rx2 + ry2 + rz2 ) e k ( k = k x2 + k y2 + k z2 ). In tal modo si ottengono grandezze che
dipendono dal modulo della distanza r e dal modulo del vettore d’onda, ma non dalla loro direzione.
Tali grandezze si definiscono nel modo seguente:
Φ ij (k ) = ϕ ij (k x , k y , k z )dσ k
∫
σk
1
R ij (r ) =
Rij ( x , y , z )dσ
4πr 2 σ∫k
(48)
in cui σ k è la superficie sferica di raggio k, σ la superficie sferica di raggio r. Il motivo per cui il
1
è dovuto al fatto che con tale scelta
primo integrale non è diviso per il fattore
4πk 2
Φ ij (k ) rappresenta effettivamente il contributo allo spettro del tensore di correlazione, compreso tra
196
il numero d’onda k e il numero d’onda k+dk, mentre R ij (r ) rappresenta il valore medio del tensore
di correlazione sulla superficie sferica di raggio r. Le funzioni Φ ij (k ) e R ij (r ) sono legate tra loro
dalle seguenti trasformate-seno di Fourier:
∞
2
(
)
R (r )kr sin(kr )dr
k
Φ
=
ij
π ∫0 ij
∞
R (r ) = Φ (k ) sin(kr ) dk
∫0 ij
ij
kr
(49)
L’interesse nel considerare tali grandezze mediate è dovuto al fatto che lo spettro dell’energia
cinetica turbolenta media E (k ) è definito in base allo spettro mediato del tensore di
Φ (k ) + Φ 22 (k ) + Φ 33 (k )
correlazione: E (k ) = 11
, mentre l’energia cinetica turbolenta media può
2
essere definita in base alle componenti del tensore
R ij calcolate in r=0:
R 11 (0) + R 22 (0) + R 33 (0 )
.
2
Pertanto dalla (49) si può riconoscere che la relazione tra l’energia cinetica turbolenta media K e
K =
R 11 (0 ) + R 22 (0 ) + R 33 (0 )
= ∫ E (k )dk .
2
0
La misura sperimentale dei vari tipi di spettro sinora considerati risulta estremamente onerosa. Ad
esempio, volendo determinare sperimentalmente lo spettro (46) si potrebbe pensare di determinare
preliminarmente la componente del tensore di correlazione e successivamente applicare a tale
componente la trasformata di Fourier. Il problema fondamentale nell’applicare tale procedura
consiste nel fatto che per poter eseguire la trasformata di Fourier spaziale è necessario disporre di
un numero elevatissimo di dati sperimentali (altrimenti la risoluzione in frequenza potrebbe non
essere soddisfacente) e di conseguenza è necessario eseguire un numero altrettanto elevato di prove
sperimentali. Per ovviare a tale inconveniente, la misura sperimentale degli spettri si basa
normalmente sulla ipotesi semplificativa di “frozen turbulence”: letteralmente di turbolenza
congelata. Tale ipotesi, dovuta a Taylor, si applica soprattutto in quei casi di turbolenza stazionaria,
in cui vi sia un flusso principale (ad esempio in condotta o a superficie libera) caratterizzato da una
velocità media U. In tal caso, considerando il punto origine coincidere con lo zero, si può ipotizzare
che quanto accade nel punto origine nell’istante t+τ sia pari a ciò che accade nel punto distante x
dall’origine, nell’istante t, essendo la distanza x e il tempo di ritardo τ legati dalla relazione:
x = Uτ . formalizzando tale concetto si può porre:
∞
lo spettro E (k ) è data dalla: K =
x
Rij ( x ) = u i ' (0,t )u j ' ( x ,t ) = u i ' (0 ,t )u j ' 0 ,t + = u i ' (0,t )u j ' (0,t + τ ) = C ij (τ )
U
(50)
In base a tale ipotesi dunque, il tensore di correlazione coincide con il coefficiente di crosscorrelazione calcolato con le due componenti di velocità u' i ,u' j , avendo definito il tempo di
x
. L’ipotesi di turbolenza congelata esprime il fatto che il valore assunto
U
istantaneamente dalla componente di velocità in un punto viene trasportato convettivamente dalla
velocità media U e lo si ritrova inalterato in un punto distante x = Uτ , dopo l’intervallo di
ritardoτ come: τ =
197
x
. La conseguenza dell’ipotesi di turbolenza congelata consiste nel fatto che per
U
determinare sperimentalmente la componente del tensore di correlazione non è più necessario
eseguire M misure in M punti distinti, ma è sufficiente eseguire una unica misura per un tempo
sufficientemente lungo e successivamente calcolare il coefficiente di cross-correlazione tramite la:
tempo τ =
C ij (τ n ) =
1
N
− U i )(u jk + n − U j ), n = 0,K , N TOT − N
N
∑ (u
k =1
ik
(51)
essendo τ n il tempo di ritardo, definito dalla τ n = n∆t . La misura viene eseguita per un tempo pari a
T = N TOT ∆t , in modo da poter calcolare il coefficiente di cross-correlazione per un tempo di ritardo
massimo pari a: τ max = ( N TOT − N )∆t .
Dalla uguaglianza (50) si deduce che:
1
Rij ( x ) =
2π
+∞
∫ ϕ (k )e
ij
x
+∞
dk x = ∫ C ij ( f )e I 2πfτ df = Cij (τ )
Ik x x
−∞
(52)
−∞
ossia deve sussistere una relazione tra lo spettro spaziale del tensore di correlazione ϕ ij (k x ) e lo
spettro in frequenza del coefficiente di cross-correlazione C ij ( f ) . Per ricavare tale relazione, si può
partire dalla considerazione del fatto che il numero d’onda è l’inverso di una lunghezza, che può
essere espressa come il rapporto della velocità convettiva U e della frequenza f:
kx =
2π
f
U
⇒ dk x =
2π
df
U
(53)
Di conseguenza, cambiando la variabile di integrazione nell’integrale rispetto alla frequenza e
x
si ha:
tenendo conto della: τ =
U
1
2π
+∞
Ik x
∫ ϕij (k x )e dk x =
x
−∞
+∞
U
∫ 2π C ( f )e
ij
Ik x x
dk x
⇒ ϕ ij (k x ) = UC ij ( f )
(54)
−∞
che è la relazione cercata, con la quale è possibile definire sperimentalmente lo spettro spaziale
della componente del tensore di correlazione, tramite la conoscenza dello spettro temporale del
coefficiente di cross-correlazione. Dal punto di vista operativo, sarà pertanto sufficiente applicare la
trasformata di Fourier discreta al coefficiente di cross-correlazione Cij (τ ) .
Più complicata è la definizione sperimentale dello spettro della energia cinetica turbolenta E(k).
Infatti l’ipotesi della frozen turbulence prevede l’esistenza di una velocità convettiva media e
dunque l’esistenza di una più o meno marcata anisotropia, mentre la definizione stessa di E(k),
derivando dalla definizione delle grandezze mediate in cui ogni forma di dipendenza direzionale
viene eliminata, implica l’ipotesi di isotropia. In altre parole, l’ipotesi della frozen turbulence non è
più applicabile come in precedenza e si deve necessariamente effettuare una misura di correlazione
spaziale. Si può però dimostrare – la qual cosa esula dagli scopi del corso – che la sola
determinazione sperimentale della funzione:
198
f (r ) =
u' (0 )u' (r )
u' (0 )
2
=
u' (0 )u' (r )
(55)
u' 2
in cui u è una componente di velocità qualsiasi, r la distanza tra i punti di misura, rilevata lungo la
2
direzione di u (figura 4) e u' 2 = u' (0 ) :
u(0)
r
u(r)
Figura 4. Definizione sperimentale della funzione f.
risulta sufficiente per la determinazione sperimentale dello spettro E(k). Si dimostra infatti che:
E (k ) =
∞
u' 2
df
3 f (r ) + r kr sin(kr )dr
∫
π 0
dr
(56)
Pertanto, eseguendo la determinazione sperimentale della funzione f e calcolando l’integrale (56), si
perviene alla determinazione sperimentale dello spettro E(k).
7. Funzioni di dissipazione e produzione.
In ipotesi di turbolenza omogenea e isotropa, si può dimostrare che la funzione di dissipazione ε è
data dalla:
∂u'
ε = 2ν D' : D' = 15ν
∂x
2
(57)
ossia la funzione di dissipazione viene espressa in funzione di una unica derivata della componente
di velocità rispetto alla direzione spaziale omologa. La determinazione sperimentale della ε viene
effettuata tramite il calcolo della derivata seconda rispetto ad r della componente R11 (r ) del tensore
di correlazione, che, in condizioni di isotropia, è definita come: R11 (r ) = u' 2 f (r ) . Si vede infatti
che:
dR11 (r )
∂u'1 ( x0 + r , t )
dr = u'1 ( x0 , t )
∂x
d 2 R11 (r )
∂ 2u'1 ( x0 + r , t )
(
)
u
'
x
,
t
=
=
1
0
2
∂x 2
dr
∂ u'1 ( x0 , t ) ∂u'1 (x0 + r , t ) − ∂u'1 ( x0 , t ) ∂u'1 (x0 + r , t ) = − ∂u'1 ( x0 , t ) ∂u'1 ( x0 + r , t )
∂x
∂x
∂x
∂x
∂x
∂x
2
2
2
d R11 (r )
∂u'1 ( x0 , t )
2 d f (r )
u
'
=
−
=
dr 2
dr 2 r =0
∂x
r =0
Le operazioni di derivazione rispetto ad r vengono eseguite sfruttando la seguente proprietà:
199
(58)
x = x + r
0
d
d
u'1 ( x0 ,t )u'1 ( x0 + r ,t ) = u'1 ( x0 ,t ) u'1 ( x 0 + r ,t ) =
dr
dr
∂
∂x
∂
= u'1 ( x 0 ,t ) u'1 ( x0 + r ,t )
u'1 ( x0 ,t ) u'1 ( x0 + r ,t )
∂x
∂r
∂x
(59)
ossia derivando rispetto all’argomento x della funzione e successivamente derivando tale argomento
rispetto ad r. La proprietà utilizzata nella terza riga (58) discende dall’aver ipotizzato l’omogeneità,
ossia dall’aver escluso la dipendenza da x della componente del tensore di correlazione:
Dunque
∂u'
∂x
2
ε = 15ν
= −15νu' 2
d 2 f (r )
dr 2 r =0
(60)
quindi, tramite la misura della funzione f(r), è possibile risalire alla funzione di dissipazione, in
ipotesi di turbolenza isotropa ed omogenea.
Per quanto riguarda la misura della funzione produzione:
P = ρ u'⊗u' : grad (U )
(61)
il caso più semplice è costituito da un flusso uniforme avente direzione prevalente (ad esempio il
flusso uniforme in condotta o in un canale a superficie libera). In tal caso infatti, si ha una unica
∂U
componente di velocità media U, il cui gradiente coincide con la derivata
, essendo y la
∂y
direzione perpendicolare alla direzione prevalente del moto. La funzione produzione è quindi data
dalla:
P = 2 ρ u' v'
∂U
∂y
(62)
dunque si devono misurare due componenti di velocità e da esse ottenere il profilo della velocità
media prevalente e calcolarne la derivata.
La misura della funzione produzione è utile per la misura della funzione dissipazione, nel caso di
turbolenza non isotropa. Si deve però fare ricorso all’ipotesi di equilibrio: ossia al fatto che la
dissipazione e la produzione siano in equilibrio tra loro, valida nel caso di turbolenza stazionaria e
nell’ipotesi di poter trascurare la diffusione di energia cinetica turbolenta media e le fluttuazioni
della pressione. In tal caso, la misura della dissipazione eguaglierà la misura della produzione.
8. Scale spaziali e temporali.
E’ noto che la microscala spaziale λ della turbolenza può essere definita come la scala spaziale in
corrispondenza della quale la dissipazione dell’energia è attiva. Una definizione immediata di tale
microscala, in ipotesi di turbolenza omogenea ed isotropa, discende dalla (60):
d 2 f (r )
u' 2
ε = −15νu'
ν
=
λ2
dr 2 r =0
2
d 2 f (r )
⇒ λ = −15
2
dr
r =0
2
200
−1
(63)
dalla quale si evince che la derivata seconda della funzione f(r), calcolata nell’origine, deve essere
negativa.
La macroscala spaziale della turbolenza, intesa come la scala spaziale oltre la quale non si ha
correlazione tra le componenti di velocità fluttuante, può essere definita, facendo riferimento per
semplicità alla correlazione spaziale R11 (r ) , come:
∞
L11 = ∫
0
R11 (r )
dr
u' 2
(64)
Tale lunghezza assume un valore finito in virtù del fatto che la componente del tensore di
correlazione si annulla e rimane nulla oltre un certo valore di r, in quanto viene a mancare la
correlazione tra le componenti di velocità fluttuante in quella direzione.
Analogamente, la macroscala temporale della turbolenza, intesa come la scala temporale oltre la
quale non si ha correlazione tra le componenti di velocità fluttuante, può essere definita come:
T
Tij = ∫
C ij (τ )
u' 2
0
dτ
(65)
Per la microscala temporale invece può essere adottata la definizione di Kolmogorov:
ν
τ =
ε
12
(66)
che richiede una misura della funzione di dissipazione.
Strumenti di misura della velocità e della pressione
I principali strumenti di misura della velocità e della pressione sono, per quanto riguarda la velocità:
1.
2.
3.
4.
tubo di Pitot;
anemometro a filo e film caldo;
anemometro laser-doppler;
anemometro a ultrasuoni;
e per quanto riguarda la pressione:
1. celle di pressione.
1. Strumenti di misura della velocità. Il tubo di Pitot.
Il tubo di Pitot è lo strumento più semplice per la misura della componente di velocità in un punto.
Il suo principio di funzionamento è basato sulla applicazione del teorema di Bernoulli alla linea di
flusso i cui estremi passano per il punto P, in cui si vuole conoscere il valore della velocità, e il
punto O, posto sulla estremità frontale o naso del tubo (figura 4):
201
Figura 4. Schema del tubo di Pitot
Il manometro differenziale misura la differenza di pressione esistente tra il punto di ristagno, ove si
riscontra la pressione totale, somma della pressione statica e della pressione dinamica, e la presa
statica, in corrispondenza della quale si suppone che la pressione assuma il valore indisturbato che
si misurerebbe in P. Si ha pertanto:
u= 2
∆p
ρ
= 2
pO − p P
ρ
= 2g
ρm − ρ
∆
ρ
(67)
essendo ρ m , ρ , ∆ rispettivamente la densità del fluido manometrico, la densità del fluido di cui si
misura la velocità e il dislivello nel manometro differenziale.
La realizzazione del tubo di Pitot illustrata in figura 4 è adatta a compiere misure stazionarie della
componente di velocità orientata secondo l’asse orizzontale del tubo. Il dislivello all’interno del
manometro differenziale infatti non riesce a seguire le fluttuazioni temporali della componente di
velocità che si vuole misurare e la lettura di un dislivello rapidamente variabile risulta estremamente
difficoltosa. Per rendere il tubo di Pitot adatto alle misure di componenti di velocità turbolente, si
sostituisce il manometro differenziale con due celle di pressione, ossia con due sensori che
permettono di seguire le vicende temporali della differenza tra le pressioni e di trasformarla in un
segnale elettrico (tipicamente una differenza di potenziale), il quale per sua natura si presta ad
essere registrato ed analizzato secondo le tecniche di analisi del segnale viste sopra.
Il principale vantaggio del tubo di Pitot può essere ravvisato nella sua semplicità, mentre il
principale svantaggio è costituito dal fatto che la scala dello strumento, ossia la relazione (67) tra la
grandezza in uscita (il dislivello del manometro differenziale o la differenza di pressioni) e la
grandezza in entrata (la componente di velocità u), non è lineare. Per tale motivo la sensibilità (la
derivata della grandezza in uscita rispetto alla grandezza in entrata) non è costante al variare della
grandezza in entrata:
∆p = ρ
u2
2
⇒
d∆p
= ρu
du
(68)
ma varia linearmente con essa: ciò significa che la sensibilità dello strumento tende a zero con il
tendere a zero del valore da misurare.
202
Non deve inoltre essere trascurato, tra gli svantaggi del Pitot, il fatto che tale strumento sia
altamente intrusivo rispetto al flusso, ossia che generi una perturbazione di non trascurabile entità
sul flusso da misurare.
2. Strumenti di misura della velocità. L’anemometro a filo e film caldo.
L’anemometro a filo e film caldo è lo strumento che ha permesso un decisivo sviluppo nello studio
sperimentale della turbolenza. E’ costituito, nella sua realizzazione più semplice, da un supporto a
forchetta (figura 5a,b) tra le estremità del quale è teso un filo (per l’utilizzo in aria) o film (per
l’utilizzo in acqua) metallico. Nel caso dell’utilizzo in acqua, il film è rivestito da una pellicola di
vernice isolante. La misura della velocità avviene facendo passare nel filo o film una corrente
elettrica che genera calore per effetto Joule. Il flusso che lambisce il filo o il film asporta calore per
convezione in funzione della velocità del flusso. In definitiva si possono scrivere le seguenti
equazioni:
(
)
R0 [1 + α (T − T0 )]I 2 = A* + B* u n (T − T0 )
V2
*
* n
R [1 + α (T − T )] = A + B u (T − T0 )
0
0
(
(69)
)
In entrambe a primo membro appare la potenza elettrica, espressa in funzione della differenza di
potenziale V imposta ai capi della forchetta o della corrente I che passa nel filo o nel film. La
resistenza offerta dal filo o dal film al passaggio della corrente elettrica è espressa in entrambi i casi
al variare della temperatura T: pertanto R0 ,α ,T0 rappresentano la resistenza alla temperatura di
riferimento, il coefficiente di temperatura della resistenza e la temperatura di riferimento.
Figura 5. Schema dell’anemometro a filo (5a) e a film caldo (5b).
La potenza termica asportata per convezione è espressa dai secondi membri delle (69), in cui
A* , B* , n sono costanti che dipendono dalla geometria del sistema.
Lo strumento può funzionare in due modalità fondamentali: a corrente e a temperatura costante.
Nella prima modalità viene mantenuta costante l’intensità di corrente I che viene fatta circolare nel
203
filo o nel film. Di conseguenza, ricavando dalla prima delle (69) l’espressione della differenza di
temperatura ed esprimendo la differenza di potenziale misurata ai capi dello strumento, si ottiene:
R0 I 2
T
T
−
=
0
A* + B* u n − αR0 I 2
α R0 I 2
V = IR = IR [1 + α (T − T )] = IR 1 +
0
0
0
*
* n
2
A + B u − α R0 I
(70)
La seconda delle (70) fornisce un legame tra la misura di differenza di potenziale V ai capi dello
strumento e la componente di velocità u.
Nella seconda modalità il filo o film caldo vengono mantenuti a temperatura costante. Di
conseguenza, la seconda delle (69) fornisce direttamente il legame tra la misura della differenza di
potenziale V ai capi dello strumento e la componente di velocità u.
Il principale vantaggio dell’anemometro a filo e film caldo è costituito dal livello di intrusività più
basso rispetto al tubo di Pitot. Infatti il diametro del filo e lo spessore del film possono essere
davvero ridotte rispetto alle dimensioni geometriche caratteristiche del flusso.
Gli svantaggi principali dell’anemometro a filo e a film caldo sono invece costituiti dalla non
linearità del legame tra V ed u e dalla complessa dipendenza dei parametri caratteristici A,B,n dalla
geometria del sistema e dalle condizioni operative, che viene determinata tramite laboriose e
frequenti operazioni di calibrazione della sonda.
3. Strumenti di misura della velocità. L’anemometro laser-doppler.
Il principio di funzionamento dell’anemometro laser-doppler si basa sul fatto che una sorgente in
movimento emette onde (luminose o acustiche) con una frequenza fd diversa da quella che si
avrebbe se la sorgente fosse in quiete. Pertanto, illuminando un punto interessato dal flusso
turbolento con una sorgente luminosa monocromatica ad alta intensità (raggio laser) e rilevando la
frequenza delle onde luminose riflesse dalle particelle in movimento in seno al flusso (particelle che
non devono influenzare il moto e che sono trasportate passivamente dal flusso), si può risalire alla
misura della velocità del flusso nel punto interessato, valutando la differenza tra la frequenza
dell’onda emessa e la frequenza dell’onda riflessa.
Nell’uso corrente, la realizzazione dell’anemometro è quella illustrata in figura 6:
Figura 6. Schema dell’anemometro laser-doppler
in cui due raggi di luce monocromatica ad alta intensità, di frequenza f, i cui assi, appartenenti al
piano del disegno, sono separati da un angolo θ, vengono fatti convergere nel punto P per cui passa
una particella fluida con velocità v. Tale particella riflette e invia un raggio di luce, con frequenza
204
fd, al ricevitore R. La differenza di frequenza ∆f=fd-f viene espressa in funzione della velocità della
particella fluida e convertita in segnale elettrico.
Il legame tra la differenza di frequenza e la velocità della particella fluida si ottiene dalle seguenti
considerazioni. Innanzitutto si deve considerare la frequenza “vista” dalla particella in movimento,
pari a:
v ⋅n
f ' = f 1 −
c
(71)
cui corrisponde la frequenza emessa dalla particella fluida e rilevata dal ricevitore:
v ⋅n
1 −
f'
c
f '' =
= f
v ⋅ nR
v ⋅ nR
1 −
1 −
c
c
(72)
D‘altra parte, al ricevitore illustrato in figura 6, pervengono i segnali luminosi aventi frequenze
f1' ' , f 2' ' , corrispondenti alle direzioni n1, n2 e date rispettivamente dalle:
v ⋅ n1
1 −
c
f 1' ' = f
v
n
⋅
R
1 −
c
v ⋅ n2
1 −
c
f 2' ' = f
v ⋅nR
1 −
c
(73)
In definitiva, le frequenze doppler sono date dalle:
v ⋅ (n R − n1 )
v ⋅ (n R − n1 )
f d 1 = f1' ' − f = f v ⋅ n ≈ f
c
R
c 1 −
c
f = f ' ' − f = f v ⋅ (n R − n 2 ) ≈ f v ⋅ (n R − n 2 )
2
d2
c
v ⋅ nR
c 1 −
c
(74)
L’eguaglianza approssimata è dovuta al fatto che a denominatore si trascura il rapporto
v ⋅nR
rispetto all’unità, essendo c la velocità della luce.
c
Il ricevitore R riceve la somma dei segnali luminosi aventi frequenze date dalle (74). Di
conseguenza, la potenza del segnale al ricevitore, quantità oggetto della misura, è data dalla:
P = 2 A 2 {1 + cos[2π ( f d 1 − f d 2 )t ]}
(75)
205
ossia il ricevitore rileva un segnale con media costante e fluttuazione con frequenza ∆f = f d 1 − f d 2 .
Quest’ultima, espressa dalla:
∆f = f d 1 − f d 2 = f
v ⋅ (n 2 − n1 ) v ⋅ (n 2 − n 1 )
=
c
λ
(76)
è la quantità convenzionalmente assunta come frequenza doppler. Nella (76) λ è la lunghezza
dell’onda luminosa. Considerando lo schema illustrato in figura 6, si vede che:
θ
2u sin
v ⋅ (n 2 − n1 )
2
∆f =
=
λ
(77)
λ
essendo u la componente di velocità in direzione x.
Dalla misura della differenza di frequenza tra i due segnali luminosi, si perviene, tramite la (77),
alla determinazione della componente di velocità desiderata.
I principali vantaggi dell’anemometro laser doppler sono da vedersi nella assenza di disturbo al
flusso, nella linearità della relazione ingresso-uscita (77) e nella accuratezza della misura: il volume
di misura è definito dall’intersezione dei raggi di misura.
I principali svantaggi consistono nel costo degli apparati e nella loro complessità. Inoltre nel flusso
devono essere presenti particelle neutre (ossia tali da non disturbare il flusso e da essere trasportate
da quest’ultimo) capaci di riemettere i segnali luminosi captati. Nel caso in cui le naturali impurità
presenti nel fluido di misura non fossero sufficienti allo scopo, è necessario disperdere nel flusso
particelle di opportuno materiale.
4. Strumenti di misura della velocità. L’anemometro a ultrasuoni.
Il principio di funzionamento dell’anemometro a ultrasuoni è basato sull’effetto doppler esibito
dalle onde acustiche ultrasonore. E’ costituito (Figura 7) da una sorgente A che emette impulsi di
ultrasuoni a frequenza f e da un ricevitore M che riceve impulsi di ultrasuoni con frequenza doppler
f D , emessi da particelle in sospensione nel flusso. Facendo riferimento alla figura 7, la frequenza
doppler f D dell’impulso emesso dalla particella investita dall’impulso con frequenza f e rilevata da
M è data dall’espressione:
fD =
2u
λ
cos(θ R ) =
2u
f cos(θ R )
c
(78)
Pertanto, conoscendo le costanti c (velocità di propagazione del suono nel fluido) e f (frequenza
dell’ultrasuono emesso da A) si risale alla componente di velocità u.
206
Figura 7. Schema dell’anemometro a ultrasuoni
Da quanto visto, l’anemometro a ultrasuoni presenta gli stessi vantaggi dell’anemometro laser
doppler: intrusività nulla e linearità della relazione grandezza di entrata- grandezza di uscita. Inoltre
non è necessario inseminare il flusso con particelle aventi particolari proprietà, come nel caso
dell’anemometria laser doppler: le piccole impurità presenti inevitabilmente nel flusso
(specialmente quando si tratta di acqua) hanno proprietà più che soddisfacenti riguardo alla
riflessione delle onde sonore.
M
P
A
Figura 8. Rappresentazione del volume di misura dell’anemometro a ultrasuoni.
Il principale svantaggio dell’anemometro a ultrasuoni è costituito dalla dimensione del volume di
misura. Infatti, facendo riferimento alla figura 8, l’impulso di ultrasuoni, sia emesso che ricevuto,
non è costituito da una retta, ossia non è di forma cilindrica (come invece è il raggio luminoso del
laser), ma è di forma conica con angolo di apertura dipendente da vari fattori, tra i quali si ricorda la
geometria della sonda emittente, la realizzazione di quest’ultima, etc. Pertanto al ricevitore
pervengono gli impulsi ultrasonori provenienti non dal punto di misura P, ma da un suo intorno più
o meno grande. Di conseguenza, la velocità misurata non è rigorosamente locale, ma è da
considerarsi media su un intorno del punto P prescelto.
5. Strumenti di misura della pressione.
Per la misura delle pressioni nei flussi turbolenti, si devono necessariamente impiegare strumenti di
adeguata prontezza, ossia in grado di seguire le fluttuazioni temporali della grandezza oggetto della
misura. Per questo motivo gli strumenti tradizionali (piezometri e manometri) non possono essere
adottati. Si dovranno invece adottare strumenti in grado di convertire la pressione in differenza di
potenziale. Tali strumenti sono le cosiddette celle di pressione, il cui principio di funzionamento è
sostanzialmente basato sulla deformazione di un elemento metallico che conseguentemente varia la
sua resistenza o capacità. In tal senso si possono avere celle resistive o capacitive.
Per quanto riguarda le celle resistive, dato un conduttore, di lunghezza L, sezione σ e resistività ρ,
la sua resistenza elettrica R è data da:
207
R=ρ
L
(79)
σ
In conseguenza di un allungamento ∆L , il conduttore varia la sua resistenza elettrica:
R + ∆R = (ρ + ∆ρ )
∆L ∆ρ ∆σ
L + ∆L
≈ R1 +
+
+
L
σ − ∆σ
ρ
σ
⇒
∆R ∆L ∆ρ ∆σ
=
+
+
R
L
ρ
σ
Dei tre termini costituenti la variazione percentuale della resistenza elettrica del conduttore
(80)
∆ρ ∆σ
,
ρ
σ
∆L
∆R
∆L
∆p
. In pratica si pone:
=K
, essendo E il
=K
L
R
L
E
modulo di Young del materiale costituente il conduttore. In definitiva, misurando la variazione di
resistenza, che viene ricondotta alla misura di una differenza di potenziale, si misura la variazione
di pressione. Nelle realizzazioni pratiche, il conduttore viene montato su una lamina che viene
posta a contatto con l’ambiente di cui si vuole misurare la pressione. La lamina viene deformata
dalla azione della pressione e il conduttore subisce l’allungamento conseguente.
Per quanto riguarda le celle capacitive, la lamina deformabile costituisce direttamente l’armatura di
un condensatore, il cui dielettrico è l’aria. L’altra armatura è costituita da una lamina rigida.
Sottoposta all’azione della pressione, la lamina deformabile riduce il volume del dielettrico,
causando così una variazione della capacità del condensatore:
possono essere espressi in funzione di
C + ∆C =
εσ
d 0 − k∆p
≈
εσ
k∆p
1 +
⇒
d0
d 0
∆C k∆p
=
C
d0
(81)
Analogamente a quanto visto per la cella resistiva, si misura la variazione percentuale di capacità,
opportunamente trasdotta in differenza di potenziale e conseguentemente la pressione.
Il vantaggio offerto da entrambe le celle è costituito dalla linearità delle relazioni grandezza di
ingresso-grandezza di uscita. Linearità che vale nel campo delle piccole deformazioni delle lamine e
dei conduttori, quali si suppone siano quelle in considerazione.
Tecniche di visualizzazione dei flussi turbolenti.
Come affermato nella premessa, una parte consistente dell’attività sperimentale riguardante i flussi
turbolenti ha per scopo la loro visualizzazione. Per visualizzazione si deve intendere una
realizzazione sperimentale tale da rendere visibili all’occhio umano le caratteristiche salienti dei
flussi, con particolare riguardo alle cosiddette strutture coerenti, ossia ai macrovortici turbolenti.
La visualizzazione dei flussi turbolenti tendeva, almeno in origine, a fornire una descrizione
qualitativa del flusso: consistente cioè nella mera osservazione visiva e nella conseguente
descrizione, rinunciando però ad una quantificazione della turbolenza (valori medi, sforzi di
Reynolds etc.). Tale approccio, che può essere fatto risalire a Leonardo da Vinci, ha dato notevoli
contributi allo sviluppo della turbolenza: la maggior parte delle recenti scoperte sulla
macroturbolenza e sulle strutture coerenti è proprio dovuta alla visualizzazione dei flussi.
In linea generale, una visualizzazione di un flusso turbolento viene realizzata tramite una ripresa
cinematografica del flusso, in cui le strutture turbolente vengano messe in opportuna evidenza, e la
conseguente analisi delle immagini. Per tale scopo vengono usate particelle disperse nel flusso o
appositi fluidi colorati traccianti, entrambi neutri dal punto di vista dinamico, che, immessi nel
flusso, fanno risaltare le strutture turbolente. L’occhio umano o una macchina da ripresa sono
generalmente in grado di apprezzare le strutture turbolente caratterizzate da scale spaziali al di sopra
di un valore minimo, questo spiega il fatto che le visualizzazioni sono particolarmente adatte a
208
descrivere la macroturbolenza, mentre non sono chiaramente adatte a rendere visibili le microscale.
In definitiva, le tecniche di visualizzazione sono le più svariate e fondamentalmente si basano anche
sulla fantasia e l’estro dello sperimentatore.
I recenti sviluppi della cinematografia digitale e delle tecniche di analisi di immagine, hanno reso le
tecniche di visualizzazione dei flussi strumenti di indagine di crescente importanza, dai quali si
possono cioè trarre informazioni sulle statistiche della turbolenza. A tal proposito merita un cenno,
per l’importanza recentemente acquisita nella sperimentazione sui flussi turbolenti, la tecnica di
visualizzazione PIV.
La tecnica PIV (Particle Image Velocimetry o velocimetria della particella imagine) permette di
misurare l’intero campo di velocità di un flusso in sezioni prestabilite al variare del tempo, non è
intrusiva e si basa sulla misurazione della velocità di particelle immagine o traccianti, neutrali dal
punto di vista dinamico, le cui dimensioni possono raggiungere il micron (10-6 m). Il campo di
velocità misurabile è assai ampio, potendo spaziare da valori nulli a supersonici. La PIV pertanto
consente di ottenere statistiche spaziali e temporali, difficilmente ottenibili o impossibili da ottenere
con altre tecniche sperimentali. In tal senso è la tecnica sperimentale i cui risultati più si avvicinano
alle simulazioni numeriche più recenti (LES, DNS).
Il principio generale di funzionamento è il seguente (figura 9): vengono generati impulsi laser,
distanziati da un intervallo di tempo ∆t, e inviati ad un sistema ottico in grado di generare un piano
luminoso che interseca il flusso con le particelle, rendendole punti ad elevata intensità luminosa. Su
tale piano viene individuata l’area di misura, suddivisa a sua volta in sottoaree o aree di
interrogazione AI. Una telecamera digitale riprende quanto avviene sul piano luminoso, generando
un’immagine digitalizzata, ossia ridotta a funzione intera I(x,y), il cui valore è proporzionale alla
luminosità del punto x,y, ogni ∆t secondi. Considerando ora due immagini digitalizzate consecutive
I1, I2, si effettua la cross-correlazione spaziale, definita dalla:
R (s x , s y ) = ∫∫ I1 ( x , y )I 2 (x + s x , y + s y )dxdy
(82)
AI
sx , ~
s y in
per ciascuna area di interrogazione AI, in cui è stata suddivisa l’area di misura. La posizione ~
cui la funzione R presenta un picco fornisce lo spostamento associato alle particelle luminose
contenute nell’area di interrogazione, da considerarsi pertanto come un singolo elemento fluido. Le
componenti di velocità associate a tale elemento fluido risultano pertanto date da:
u=
s
sx
,v = y
∆t
∆t
(83)
209
Figura 9. Schema di massima della tecnica PIV
Da quanto visto brevemente, risulta che la tecnica PIV è in grado di fornire il valore medio spaziale
del vettore velocità dell’elemento fluido, di dimensione caratteristica pari a quella dell’area di
interrogazione dAI. Di conseguenza l’accuratezza della misura sarà legata all’entità di tale
dimensione caratteristica. Limiti posti alla scelta di dAI sono anche fissati dalla necessità che
nell’istante t+∆t nell’area AI siano ancora presenti la maggior parte delle particelle che erano
presenti in tale area all’istante t: ossia che la maggior parte delle particelle che erano nell’area
nell’istante iniziale non la abbandonino. Ovviamente, maggiore è la velocità del flusso, maggiore, a
parità di ∆t, dovrà essere la dimensione dell’area di interrogazione e minore sarà l’accuratezza della
misura. In tal modo, per mantenere l’accuratezza della misura a livelli accettabili al crescere della
velocità, si dovrà ridurre l’intervallo di tempo ∆t, ossia far uso di telecamere a velocità crescente.
Le particelle da usare nelle misure possono essere di qualsiasi genere purchè seguano il flusso e
riflettano la luce con intensità tale da poter essere catturata dalla telecamera. Tipicamente si usano
goccioline d’olio in aria (di diametro da 1 a 5 micron) e sferette di polistirene, poliammide o vetro
(di diametro da 5 a 100 micron) in acqua.
Il numero di particelle è pure un parametro importante nell’ottenere una misura accurata, legata alla
intensità del picco della cross-correlazione (82). In generale dovrebbero esserci da 10 a 25 particelle
in ciascuna area di interrogazione.
210