caricato da
common.user5418
Esercizio di Meccanica Razionale: Aste e Equilibrio

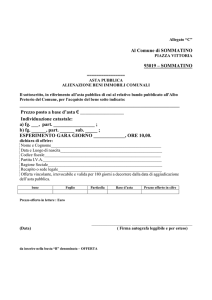
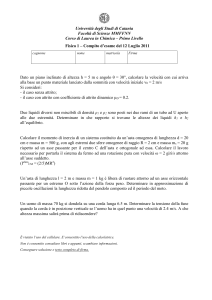
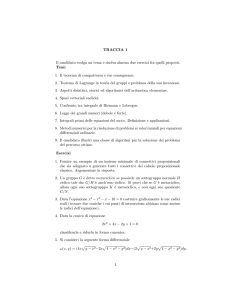
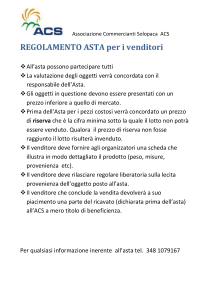
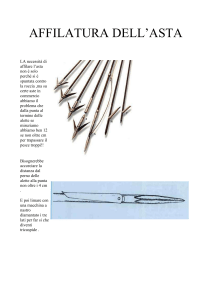
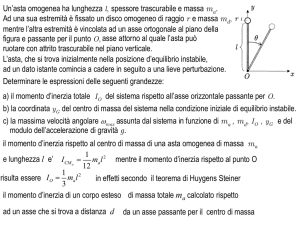
Esercizio 1 Un sistema materiale costituito da due aste omogenee AB e AH di uguale massa m e di lunghezza rispettivamente 4` e 2` è mobile nel piano verticale Oxy con assi di versori ıˆ e ˆ (come in figura). Il sistema è cosı̀ vincolato a - il punto medio dell’asta AB è incernierato nell’origine O del sistema di riferimento b - l’estremo A dell’asta AH è incernierato nell’estremo A dell’asta AB, mentre l’estremo H è vincolato a scorrere sull’asse x. mg Oltre alla forza peso sul sistema agisce la forza elastica Fe = −α (B − B 0 ) ` 0 applicata in B, con B proiezione di B sull’asse x. Preso come parametro lagrangiano ϑ angolo che l’asta AB forma con l’asse y, 1 - Determinare il centro di istantanea rotazione per l’asta AH, scrivere le equazioni della base e della rulletta e disegnarne il grafico. 2 - Determinare le configurazioni di equilibrio del sistema e studiarne la stabilità, al variare di α > 0. 1 3 - Fissato α = , determinare le reazioni vincolari statiche in O e in H in 2 una configurazione di equilibrio stabile. 4 - Sempre per α = 1 scrivere l’energia meccanica del sistema. 2 y B H B x O J A 1 Soluzione dell’Esercizio 1 1. Considerazioni generali Il sistema è olonomo a un grado di libertà. I vincoli sono fissi e bilaterali. In funzione del parametro lagrangiano i punti A, B, H e il baricentro G dell’asta AH hanno coordinate A = (2` sin ϑ, −2` cos ϑ) B = (−2` sin ϑ, 2` cos ϑ) , H = (4` sin ϑ, 0) , G = (3` sin ϑ, −` cos ϑ), le velocità angolari delle aste AB e AH sono rispettivamente ωAB = ϑ̇ˆ ı ∧ ˆ ωAH = −ϑ̇ˆ ı ∧ ˆ , mentre le forze attive si scrivono mg = −mg ˆ Fe = −2αmg cos ϑˆ , base y B rulletta H B y x O J G A C 2J-p/2 x 2. Primo quesito Per la determinazione del centro di istantanea rotazione C dell’asta AH, ricordando che vP = ωAH ∧ (P − C), è sufficiente osservare che A si muove sulla circonferenza di centro O e raggio 2` e che H si muove sull’asse x e quindi (vedi figura) da (C − A) k (O − A) , (C − H) k ˆ si ha xC = xH = 4` sin ϑ , 2 yC = 2yA = −4` cos ϑ (1) Eliminando il parametro ϑ da (10) si ha l’equazione della base x2 + y 2 = 16`2 Rispetto al riferimento solidale all’asta AH, Ax0 y 0 (come in figura) le coordinate di C sono x0C = 2` sin 2ϑ , 0 yC = −2` cos 2ϑ (2) Eliminando il parametro ϑ da (11) si ha l’equazione della rulletta x02 + y 02 = 4`2 3. Secondo quesito Avendo il sistema un solo grado di libertà ed essendo le forze arrive conservative, le configurazioni di equilibrio sono quelle che rendono stazionario il potenziale. Il potenziale delle forze attive è mg U (ϑ) = −mgyG − α | B − B 0 |2 +cost. = mg`(cos ϑ − 2α cos2 ϑ) + cost. 2` I valori che rendono stazionario il potenziale sono soluzione dell’equazione U 0 (ϑ) = mg`(4α cos ϑ − 1) sin ϑ = 0 Le configurazioni di equilibrio sono ϑ1 = 0 , ϑ2 = π ∀α , ϑ3,4 = ± arccos 1 4α se α ≥ 1 4 (3) Per studiare la stabilità delle posizioni di equilibrio calcoliamo la derivata seconda del potenziale U 00 (ϑ) = mg`(8α cos2 ϑ − 4α − cos ϑ). Nelle posizioni di equilibrio di ha 00 1 U 00 (0) = mg`(4α − 1) negativa se α < 4 U (π) = mg`(4α + 1) > 0 ∀α > 0 per α ≥ 14 2 00 U (ϑ3 ) = U 00 (ϑ4 ) = mg` 1−16α negativa se α > 4α 1 4 Per α = 41 si ha ϑ1 = ϑ3 = ϑ4 = 0 e, dallo studio del diagramma di biforcazione, si può concludere che tale configurazione di equilibrioè stabile. Riassumendo si ha 0 ≤ α ≤ 41 2 posizioni di equilibrio ϑ1 , ϑ2 ϑ1 stabile α > 14 4 posizioni di equilibrio ϑ1 , ϑ2 , ϑ3 , ϑ4 ϑ3 e ϑ4 stabili 3 a=0 a=1/4 J=-arccos(1/4a) J=0 J=arccos(1/4a) J=p 4. Terzo quesito per α = 21 una posizione di equilibrio stabile è ϑ = Per il Principio delle Reazioni Vincolari, ΦO = ΦOx ıˆ + ΦOy ˆ reazione in O, π 3. ΦH = ΦH ˆ reazione in H La seconda equazione cardinale della statica per l’asta AH con polo A e la prima equazione cardinale per l’intero sistema forniscono mg ∧ (A − G) + ΦH ∧ (A − H) = 0 0 2mg − mg 2` (Be − Be ) + ΦO + ΦH = 0 Poiché (Be − Be0 ) = `ˆ , proiettando sugli assi si ottiene ΦH = 21 mg ΦOx = 0 ΦOy = 2mg 5. Quarto quesito Per calcolare l’energia cinetica del sistema calcoliamo separatamente l’energia cinetica delle singole aste. Asta AB 1 16 2 2 1 3 TAB = IO (ωAB )2 = m` ϑ̇ 2 2 12 Asta AH: applicando il teorema di König si ha TAH = = 1 1 3 2 1 2 2 2 2 mvG + 2 IG ωAH = 2 m(9` cos 1 4 2 2 2 2 m` (8 cos ϑ + 3 )ϑ̇ , ϑ + `2 sin2 ϑ)ϑ̇2 + 1 4 2 2 2 12 m` ϑ̇ quindi l’energia meccanica del sistema è 1 E = TAB + TAH − U = 4m`2 ( + cos2 ϑ)ϑ̇2 − mg`(cos ϑ − cos2 ϑ). 3 4 Esercizio 2 Un sistema materiale, costituito da un disco omogeneo √ di massa m e raggio r e da un’asta AG di uguale massa m e di lunghezza 2r, è mobile nel piano verticale Oxy con assi di versori ıˆ e ˆ (come in figura). Il sistema è cosı̀ vincolato a - il disco rotola senza strisciare sull’asse x; b - l’estremo A dell’asta scorre sull’asse x, mentre l’estremo G è incernierato nel baricentro del disco. Oltre alla forza peso sul sistema agisce i - la forza elastica Fe = −k(A − O) applicata in A; ii - la coppia di momento M = αk(G − O) ∧ (G − H) con α ∈ IR e H proiezione di G sull’asse x, applicata al disco. Preso come parametro lagrangiano ξ, ascissa del punto A, 1 - determinare le configurazioni di equilibrio del sistema e studiarne la stabilità, al variare di α 6= −1; 2 - fissato α = 1, determinare le reazioni vincolari esterne e interne nella configurazione di equilibrio stabile; 3 - sempre per α = 1 scrivere l’energia meccanica del sistema. y G x O H A 5 x Soluzione dell’Esercizio 2 1. Considerazioni generali Il sistema è olonomo a un grado di libertà. I vincoli sono fissi e bilaterali. In funzione del parametro lagrangiano i punti A e G hanno coordinate A = (ξ, 0) , G = (ξ + r, r) L’asta AG trasla e la velocità angolare del disco ω si ottiene osservando che, per il vincolo di rotolamento senza strisciamento, H è centro di istantanea rotazione, quindi vG = ω ∧ (G − H) =⇒ ξ̇ ıˆ = ω ∧ rˆ =⇒ ξ̇ ω = − ıˆ ∧ ˆ r mentre le forze attive si scrivono mg = −mg ˆ , Fe = −kξ ıˆ , M = αkr(ξ + r)ˆ ı ∧ ˆ 2. Primo quesito Avendo il sistema un solo grado di libertà ed essendo le forze arrive conservative, le configurazioni di equilibrio sono quelle che rendono stazionario il potenziale. Il potenziale della forza peso è costante, il potenziale dalla forza elastica è − k2 |A− O|2 , per determinare il potenziale delle forze attive calcoliamo il lavoro elementare compiuto dalla coppia di momento M dLM = −αkr(ξ + r)ˆ ı ∧ ˆ · dξ 1 ıˆ ∧ ˆ = d[−αk( ξ 2 + rξ)] r 2 Quindi il potenziale delle forze attive è k U (ξ) = − (α + 1)ξ 2 − αkrξ + cost. 2 I valori che rendono stazionario il potenziale sono soluzione dell’equazione U 0 (ξ) = −k(α + 1)ξ − αkr = 0 Il sistema ammette un’unica soluzione di equilibrio α ξe = − r α+1 Per studiare la stabilità della posizioni di equilibrio calcoliamo la derivata seconda del potenziale U 00 (ξ) = −k(α + 1). La derivata seconda del potenziale è costante ed è positiva se α < −1 (equilibrio instabile), negativa per α > −1 (equilibrio stabile). 6 3. Secondo quesito Per α = 1 la posizione di equilibrio ξe = − 2r è stabile. Per il Principio delle Reazioni Vincolari, ΦH = ΦHx ıˆ + ΦHy ˆ reazione esterna in H, ΦA = ΦA ˆ reazione esterna in A, ΦG = ΦGx ıˆ + ΦGy ˆ reazione vincolare interna in G. Indicato con M il baricentro dell’asta AG, la seconda equazione cardinale per l’asta AG con polo G e la prima equazione cardinale della statica per l’intero sistema permettono di determinare le reazioni vincolari esterne mg ∧ (G − M ) + (ΦA − k(Ae − O)) ∧ (G − A) = 0 2mg − k(Ae − O) + ΦA + ΦH = 0 ı , proiettando sugli assi si ottiene Poiché (Ae − O) = − 21 rˆ 1 ı ∧ ˆ + (ΦA ˆ + 12 krˆ ı ) ∧ (rˆ ı + rˆ ) = 0 =⇒ ΦA = 21 (kr − mg) − 2 mgrˆ 1 ΦHx = − 2 kr ΦHy + ΦA = 2mg =⇒ ΦHy = 12 (5mg − kr) Per determinare la reazioni vincolare interna, la prima equazione cardinale applicata all’asta fornisce mg − k(Ae − O) + ΦA + ΦG = 0 −→ 1 ΦG = −krˆ ı + (3mg − kr)ˆ 2 4. Terzo quesito Per calcolare l’energia cinetica del sistema calcoliamo separatamente l’energia cinetica dell’asta e del disco. L’asta AG trasla 1 TAG = mξ̇ 2 2 Il disco ruota attorno all’asse ortogonale al piano xy passante per H Tdisco " #2 3 1 z ξ̇ = IH = mξ̇ 2 2 r 4 quindi l’energia meccanica del sistema è E = TAG + Tdisco − U = 7 5 ˙2 mξ + kξ 2 + krξ. 4 Esercizio 3 Un corpo rigido è costituito da due aste omogenee AB e KM di ugual massa m e di lunghezza 2` e 4` rispettivamente, saldate perpendicolarmente tra loro in modo tale che M sia il punto medio di AB. 1 - Determinare la posizione del baricentro G del corpo e scrivere la matrice di inerzia rispetto ad una terna principale di inerzia centrata in G. Il corpo è mobile nel piano verticale Oxy con assi di versori ıˆ e ˆ (come in figura) con il punto M vincolato a scorrere sull’asse y ed è soggetto solamente alla forza peso. Presi come parametri lagrangiani η, ordinata di M e ϑ, angolo che l’asta KM forma con l’asse y, 2 - scrivere le equazioni differenziali che governano il moto del corpo. 3 - Introdotto l’ulteriore vincolo che impone a G di scorrere sulla retta di equazione y = 2`, determinare il centro di istantanea rotazione per il corpo, scrivere le equazioni della base e della rulletta e disegnarne il grafico. y y M B M B A G J A hJ K O O x 8 K x Soluzione dell’Esercizio 3 1. Considerazioni generali Il sistema è olonomo a due gradi di libertà. I vincoli sono fissi e bilaterali. 2. Primo quesito x2 K K H G x1 G A M B A figura 1 M B figura 2 Per simmetria il baricentro del sistema di trova sull’asta KM , e per la proprietà distributiva del baricentro, G si trova nel punto medio del segmento HM con H punto medio dell’asta M K (figura 1). In funzione dei parametri lagrangiani le coordinate del baricentro sono G = (` sin ϑ, η − ` cos ϑ) Per le proprietà di simmetria del sistema la terna Gx1 x2 x3 indicata nella figura 2 è principale di inerzia. Per l’additività dei momenti di inerzia AB KM I11 = I11 + I11 , AB KM I22 = I22 + I22 . Essendo poi il sistema piano I33 = I11 + I22 . Si ha AB (M) AB I11 = I11 + m|G − M |2 = 0 + m`2 2 KM KM (H) I11 = I11 + m|G − H|2 = m(4`) + m`2 = 73 m`2 , 12 2 m(2`) 1 AB 2 I22 = 12 = 3 m` KM I22 = 0, quindi la matrice di inerzia del sistema è 10 2 0 3 m` 1 2 0 m` 3 0 0 9 0 0 11 2 m` 3 3. Secondo quesito Essendo in presenza di un sistema rigido, le equazioni cardinali con il Principio delle Reazioni Vincolari sono sufficienti per lo studio del moto. Per il Principio delle Reazioni Vincolari, il sistema di reazioni vincolari è equivalente a un vettore ΦM = Φˆ ı applicato in M . Le equazioni del moto si ottengono proiettando la prima equazione cardinale sull’asse y mÿG = −mg e la seconda equazione cardinale con polo M ortogonalmente al piano xy. Poiché vG ∧ vM 6= 0 la seconda equazione cardinale si scrive K̇M = mg ∧ (M − G) + mvG ∧ vM Si ha quindi ÿG = η̈ + ` sin ϑϑ̈ + ` cos ϑϑ̇2 e per il teorema di König KM = K0G + mvG ∧ (M − G) Poiché la velocità angolare del sistema è ϑ̇k̂ ,( k̂ = ıˆ ∧ ˆ ), facendo i conti si ha 11 2 KM = m` ϑ̇k̂ + m`(`ϑ̇ + η̇ sin ϑ)k̂ 3 11 2 K̇z = m` ϑ̈ + m`(`ϑ̈ + η̈ sin ϑ + η̇ cos ϑϑ̇) 3 vG ∧ vM · k̂ = `η̇ cos ϑϑ̇ mg ∧ (M − G) = −mg` sin ϑk̂ Facendo le opportune semplificazioni, le equazioni dei moto sono η̈ + ` sin ϑϑ̈ + ` cos ϑϑ̇2 = −g 14 3 `ϑ̈ + η̈ sin ϑ = −g sin ϑ 4. Terzo quesito L’imposizione dell’ulteriore vincolo abbassa il grado di libertà del sistema: yG = 2` ⇒ η = 2` + ` cos ϑ. Esprimeremo quindi tutte le grandezze in funzione del parametro ϑ. Per la determinazione del centro di istantanea rotazione C del sistema, ricordando che vP = ω ∧ (P − C), è sufficiente osservare che M si muove sull’asse y e che G si muove sulla retta y = 2` e quindi (vedi figura)da (C − M ) k ıˆ , (C − G) k ˆ si ha xC = xG = ` sin ϑ , 10 yC = yM = 2` + ` cos ϑ (4) Eliminando il parametro ϑ da (10) si ha l’equazione della base x2 + (y − 2`)2 = `2 Rispetto al riferimento solidale al sistema M x0 y 0 (come in figura) le coordinate di C sono x0C = ` sin2 ϑ = ` (1 − cos 2ϑ) , 2 0 yC = ` sin ϑ cos ϑ = ` sin 2ϑ 2 Eliminando il parametro ϑ da (11) si ha l’equazione della rulletta ` 1 (x0 − )2 + y 02 = `2 2 4 y y B rulletta M C A G J O base K x 11 x (5) Esercizio 4 Un’asta AB di massa m e di lunghezza `, è mobile nel piano verticale Oxy con assi di versori ıˆ e ˆ (come in figura) ha l’etremo A vincolato a scorrere sull’asse x e l’estremo B sulla guida circolare di equazione x2 + y 2 = `2 Oltre alla forza peso sull’asta agisce i - la forza elastica Fe = −α mg (A − O) applicata in A, con α > 0; ` ii - la coppia di momento M = mg(B − A) ∧ ˆ . Preso come parametro lagrangiano ϑ, angolo che la retta OA forma con l’asse x, 1 - determinare il centro di istantanea rotazione dell’asta, le equazioni cartesiane di base e rulletta e disegnarne i grafici; 2 - determinare le configurazioni di equilibrio dell’asta e studiarne la stabilità, al variare di α > 0; π 3 - trovare per quale valore di α la configurazione ϑ = − é di equilibrio e 6 determinare le reazioni vincolari statiche in tale configurazione. y B J O A x 12 Soluzione dell’Esercizio 4 1. Considerazioni generali Il sistema è olonomo a un grado di libertà. I vincoli sono fissi e bilaterali. In funzione del parametro lagrangiano ϑ si ha: B = (` cos ϑ, ` sin ϑ) A = (2` cos ϑ, 0) , , 3 1 G = ( ` cos ϑ, ` sin ϑ) , ω = −ϑ̇ˆ ı ∧ ˆ , 2 2 con G baricentro dell’asta e ω velocità angolare dell’asta. Inoltre Fe = −2αmg cos ϑˆ ı , M = −mg` cos ϑˆ ı ∧ ˆ . 2. Primo quesito y y rulletta C B J 2J O A x x base Per la determinazione del centro di istantanea rotazione C dell’asta AB, ricordando che vP = ω ∧ (P − C), è sufficiente osservare che B si muove sulla circonferenza di centro O e raggio ` e che A si muove sull’asse x e quindi (vedi figura)da (C − B) k (O − B) 13 , (C − A) k ˆ si ha xC = xA = 2` cos ϑ , yC = 2yB = 2` sin ϑ (6) Eliminando il parametro ϑ da (10) si ha l’equazione della base x2 + y 2 = 4`2 Rispetto al riferimento solidale all’asta AB, Bx0 y 0 (come in figura) le coordinate di C sono x0C = ` cos 2ϑ , 0 yC = 2` sin 2ϑ (7) Eliminando il parametro ϑ da (11) si ha l’equazione della rulletta x02 + y 02 = `2 3. Secondo quesito Avendo il sistema un solo grado di libertà ed essendo le forze attive conservative, le configurazioni di equilibrio sono quelle che rendono stazionario il potenziale. Il potenziale della forza peso è −mgyG , 2 il potenziale dalla forza elastica è − αmg 2` |A − O| . Per determinare il potenziale delle forze attive calcoliamo il lavoro elementare compiuto dalla coppia di momento M dLM = M · ωdt = (−mg` cos ϑˆ ı ∧ ˆ ) · (−dϑˆ ı ∧ ˆ ) = d[mg` sin ϑ] Quindi il potenziale delle forze attive è 1 1 U (ϑ) = − mg` sin ϑ−2αmg` cos2 ϑ+mg` sin ϑ+cost. = mg`( sin ϑ−2α cos2 ϑ)+cost. 2 2 I valori che rendono stazionario il potenziale sono soluzione dell’equazione 1 U 0 (ϑ) = mg`( + 4α sin ϑ) cos ϑ = 0 2 Le configurazioni di equilibrio sono ϑ1 = ϑ3 = − arcsin 1 8α , π 2 , ϑ4 = π + arcsin ϑ2 = − 1 8α π 2 ∀α se α ≥ 1 8 Per studiare la stabilità delle posizioni di equilibrio calcoliamo la derivata seconda del potenziale U 00 (ϑ) = mg`[4α(1 − 2 sin2 ϑ) − 14 1 sin ϑ]. 2 Nelle posizioni di equilibrio di ha 00 π U ( 2 ) = −mg`(4α + 21 ) < 0 ∀α > 0 U 00 (− π ) = mg`( 1 − 4α) negativa se α > 2 2 1 8 per α ≥ 2 00 −1 U (ϑ3 ) = U 00 (ϑ4 ) = mg` 64α 16α 1 8 positiva se α > 1 8 Per α = 81 si ha ϑ2 = ϑ3 = ϑ4 = − π2 e, dallo studio del diagramma di biforcazione, si può concludere che tale configurazione di equilibrio è instabile. a=0 a=1/8 J=p+arccos(1/8a) J=-p/2 J=-arcsin(1/8a) J=p/2 Riassumendo si ha 0 ≤ α ≤ 81 2 posizioni di equilibrio ϑ1 , ϑ2 α > 18 4 posizioni di equilibrio ϑ1 , ϑ2 , ϑ3 , ϑ4 ϑ1 stabile ϑ1 e ϑ2 stabili 4. Terzo quesito Richiedere che ϑ = − π6 sia configurazione di equilibrio implica 1 π = =⇒ 8α 6 Per il principio delle reazioni vincolari arcsin ΦA = ΦA ˆ , α= 1 4 ΦB = ΦB vers(B − O) Nella configurazione di equilibrio √ √ 3 1 3 vers(B − O) = ıˆ − ˆ , Fe = − mg ıˆ 2 2 4 sostituendo nella prima equazione cardinale della statica si ottiene √ √ 3 3 1 −mg ˆ − mg ıˆ + ΦA ˆ + ΦB ( ıˆ − ˆ ) = 0 4 2 2 Proiettando sugli assi si ottiene 5 1 ΦA = mg , ΦB = mg 4 2 15 Esercizio 5 Un sistema materiale, mobile nel piano verticale Oxy con assi di versori ıˆ e ˆ (come in figura), è costituito da un disco omogeneo di massa m, centro G e raggio r e da un punto materiale P di massa m. Il disco è vincolato a rotolare senza strisciare sull’asse y, mentre il punto P è vincolato a scorrere sull’asse x. Oltre alla forza peso sul sistema agisce i - una forza elastica interna rappresentata da una molla ideale si costante mg elastica e lunghezza a riposo nulla che collega il centro G del disco al r punto P ; r g , applicata al punto P . ii - una forza viscosa di costante 2m r Presi come parametri lagrangiani η, ordinata di G e ξ, ascissa di P , scrivere ed integrare le equazioni differenziali che governano il moto del sistema in cor˙ rispondenza alle condizioni iniziali ξ(0) = 0, η(0) = 0, ξ(0) = 0, η̇(0) = 0 e determinare la reazione vincolare dinamica nel punto P al variare del tempo. y G h O x P 16 x Soluzione dell’Esercizio 5 1. Considerazioni generali Il sistema è olonomo a due gradi di libertà. I vincoli sono fissi e bilaterali. In funzione dei parametri lagrangiani i punti P e G hanno coordinate P = (ξ, 0) , G = (r, η). Il disco si muove di moto rigido piano e H, punto di contatto tra il disco e l’asse y è centro di istantanea rotazione, quindi, posto k̂ = ıˆ ∧ ˆ , la velocità angolare del disco si ricava dalla relazione vG = ω k̂ ∧ (G − H) ⇒ ω= η̇ r La forza elastica interna si rappresenta come la coppia FP = − mg [(ξ − r)ˆ ı − η ˆ ], applicata in P r mg [−(ξ − r)ˆ ı + η ˆ ], applicata in G r mentre la forza viscosa r g˙ Fv = −2m ξ ıˆ , applicata in P r FG = − 2. Primo quesito Per determinare le equazioni del moto, osserviamo che il sistema di reazioni vincolari si può rappresentare attraverso un vettore ΦH applicato in H (di cui non si conosce la direzione) e un vettore ΦP = ΦP ˆ applicato in P. Quindi l’equazione fondamentale della dinamica per il punto P proiettata sull’asse x e la seconda equazione cardinale con polo H per il disco, proiettata ortogonalmente al piano xy sono le equazioni del moto richieste. r mg g˙ maP · ıˆ = [mg + FP + Fv + ΦP ] · ıˆ ⇒ mξ¨ = − (ξ − r) − 2m ξ r r 3 3 3 Poiché vH ∧ vG = 0, KH = IH ω k̂ con IH = IG + mr2 = 32 mr2 e (mg+FG )∧(H−G) = [−mg ˆ − mg [−(ξ−r)ˆ ı +η ˆ ]]∧(−rˆ ı ) = −mg(η+r)k̂ r si ottiene K̇H · k̂ = [ΩeH + ΨeH ] · k̂ 17 ⇒ 3 mrη̈ = −mg(η + r) 2 Il sistema di equazioni differenziali da risolvere è il seguente pg g ξ¨ + 2 r ξ˙ + r (ξ − r) = 0 2g η̈ + 3r (η + r) = 0 ˙ ξ(0) = 0 , η(0) = 0 , ξ(0) = 0 , η̇(0) = 0 Le due equazioni sono indipendenti e hanno come integrali generali pg ( ξ(t) − r = (c1 + cq 2 t) exp[− r t] η(t) + r = c3 cos( 2g 3r t + c4 ) Imponendo le condizioni iniziali si ottiene ( p √ ξ(t) = (r + qgrt) exp[− gr t] + r η(t) = r cos( 2g 3r t) −r Per il calcolo della reazione vincolare in P consideriamo l’equazione fondamentale della dinamica per il punto P proiettata sull’asse y maP · ˆ = [mg + FP + Fv + ΦP ] · ˆ da cui ⇒ r ΦP = mg[2 − cos( 18 0 = −mg + 2g t)] 3r mg η + ΦP r Esercizio 6 Un’asta AB, di di lunghezza 2`, è mobile nel piano verticale Oxy con assi di versori ıˆ e ˆ (come in figura). L’asta è vincolata a passare per il punto O , mentre l’estremo A scorre sulla retta di equazione y = `. Preso come parametro lagrangiano ϑ, angolo che l’asta AB forma con l’asse y, 1 - determinare il centro di istantanea rotazione dell’asta e l’equazione cartesiana della base, disegnandone il grafico. L’asta AB ha la massa m concentrata nell’estremo B e oltre alla forza peso agisce una forza costante F = αmg ıˆ applicata in A, con α ∈ IR. π 2 - Determinare per quale valore di α la configurazione ϑ = é di equilibrio 6 e studiare la stabilità di tale configurazione; 3 - determinare le reazioni vincolari statiche in tale configurazione. y A OJ 19 x B Soluzione dell’Esercizio 6 1. Considerazioni generali Il sistema è olonomo a un grado di libertà. I vincoli sono fissi. Per rispettare i vincoli, parametro ϑ varia nell’intervallo [− π3 , π3 ] In funzione del parametro lagrangiano i punti A e B hanno coordinate A = (−` tan ϑ, `) , B = (−` tan ϑ + 2` sin ϑ, ` − 2` cos ϑ). La velocità angolare dell’asta è ω = ϑ̇ˆ ı ∧ ˆ . 2. Primo quesito Per la determinazione del centro di istantanea rotazione C dell’asta ricordando che vP = ω ∧ (P − C), è sufficiente osservare che A si muove su una retta parallela all’asse x, mentre il punto dell’asta che transita per O ha velocità parallela all’asta, quindi (vedi figura) (C − A) k ˆ (C − O) ⊥ (B − A) , Poiché il triangolo AOC è rettangolo e |A − C| = xC = xA = −` tan ϑ , yC = yA − ` cos2 ϑ , si ha ` = −` tan2 ϑ cos2 ϑ (8) Eliminando il parametro ϑ da (10) si ha l’equazione della base che è l’arco di parabola √ √ x2 y=− , x ∈ [− 3`, 3`] ` (non richiesta) Rispetto al riferimento solidale all’asta AB, Ax0 y 0 (come in figura) le coordinate di C sono x0C = ` cos ϑ , 0 yC = ` sin ϑ cos2 ϑ (9) Per eliminare il parametro ϑ da (11) osserviamo che `2 1 `4 `2 (1 − cos2 ϑ) = 2 − 4 4 cos ϑ ` cos ϑ cos2 ϑ quindi l’equazione della rulletta che è l’arco di curva 02 yC = x04 − x02 , x0 ∈ [`, 2`] `2 Poiché x è non negativa si può dare l’equazione esplicita dell’arco di curva v q u 02 u 1 + 1 + 4 y`2 √ √ t x0 = ` , y 0 ∈ [−2 3`, 2 3`] 2 y 02 = 20 y y rulletta A O x B J x C base 3. Secondo quesito Avendo il sistema un solo grado di libertà ed essendo le forze attive costanti e quindi conservative, le configurazioni di equilibrio sono quelle che rendono stazionario il potenziale. Il potenziale delle forze attive è U (ϑ) = −mgyB + αmgxA + cost. = mg`(2 cos ϑ − α tan ϑ) + cost. I valori che rendono stazionario il potenziale sono soluzione dell’equazione U 0 (ϑ) = −mg`(2 sin ϑ + α Ricordando che sin π6 = equilibrio se 1 2 e cos π6 = √ 3 2 , 4 U 0 (ϑ) = −mg`(1 + α) = 0 3 1 )=0 cos2 ϑ ϑ = ⇒ π 6 è configurazione di α=− 3 4 Per studiare la stabilità della posizione di equilibrio calcoliamo la derivata 21 seconda del potenziale per α = − 43 U 00 (ϑ) = −2mg`(cos ϑ − Nella posizione di equilibrio ϑ = π 6 3 sin ϑ ). 4 cos3 ϑ si ha √ π 3 3 U ( ) = −2mg`( − 6 2 4 00 1 2 √ 3 3 8 √ 3 )=− mg` < 0. 3 e si può concludere che tale configurazione di equilibrioè stabile. 4. Terzo quesito Per il Principio delle Reazioni Vincolari, ΦO ⊥ (B − A) reazione in O, ΦA = ΦA ˆ reazione in A Nella configurazione di equilibrio ϑ = π6 il versore ortogonale all’asta AB √ è û = 23 ıˆ + 12 ˆ La prima equazione cardinale della statica mg + F + ΦO + ΦA = 0 proiettata sugli assi fornisce √ − 34 mg + 23 ΦO = 0 −mg + 12 ΦO + ΦA = 0 quindi ΦO = √ √ 3 3 1 mg( ıˆ + ˆ ) , 2 2 2 22 ΦA = √ 4− 3 mg ˆ 4 Esercizio 7 Un corpo rigido, mobile nel piano verticale Oxy con assi di versori ıˆ e ˆ (come in figura), è costituito da un quadrato omogeneo ABCD di lato ` e massa µ e da un’asta omogenea HK di lunghezza 3` e massa ν che ha l’estremo H saldato nel punto medio del lato AB in modo tale che l’asta sia esterna al quadrato e perpendicolare ad AB. 1 - Determinare µ e ν in modo che la massa del corpo sia m e che il baricentro G del sistema disti 2` da K. Sapendo che G è vincolato a scorrere sull’asse x e che sul sistema agisce solo la forza peso, presi come parametri lagrangiani ξ, ascissa di G, e ϑ, angolo che l’asta HK forma con l’asse x, 2 - determinare due integrali primi di moto. y D C A H O x J G K 23 B x Soluzione dell’Esercizio 7 1. Considerazioni generali Il sistema è olonomo a due gradi di libertà. I vincoli sono fissi e bilaterali. Le forze attive sono conservative. La velocità angolare del corpo è ω = ϑ̇ˆ ı ∧ ˆ . 2. Primo quesito A D G K G1 H G2 B C figura 1 La massa del sistema materiale è m = µ + ν. Per simmetria il baricentro del sistema di trova sull’asta KH e, per la proprietà distributiva del baricentro, (figura 1) (µ + ν)|G − K| = ν|G1 − K| + µ|G2 − K| con G1 baricentro dell’asta e G2 baricentro del quadrato. Si ha µ+ν =m µ = 41 m =⇒ 2(µ + ν)` = 32 `ν + 27 µ` ν = 34 m In funzione dei parametri lagrangiani le coordinate del baricentro sono G = (ξ, 0) 3. Secondo quesito Per il Principio delle Reazioni Vincolari, il sistema di reazioni vincolari è equivalente a un vettore ΦG = Φˆ applicato in G. Il sistema delle forze 24 peso è equivalente mg applicato in G. Quindi sia le forze attive, sia le razioni vincolari risultano parallele all’asse y e hanno momento risultante nullo rispetto al polo G. Dalle equazioni cardinali della dinamica discende Q̇ · ıˆ = 0 ẋG = cost =⇒ 3 KG = cost K̇G = 0 3 3 Poiché ẋG = ξ˙ e KG = IG ϑ̇ si può concludere che gli integrali primi di moto sono ξ˙ = cost , ϑ̇ = cost 3 Il calcolo di IG non risulta necessario in quanto è costante. Per completezza 3 1 65 2 3 3 3 IG = IG + m|G − G1 |2 + IG + m|G − G2 |2 = m` 1 2 4 4 48 Ad uno dei due integrali primi sopra trovati si poteva sostituire l’integrale primo dell’energia T +V =E ⇒ T =E 25 ⇒ 1 ˙2 41 2 2 [mξ + m` ϑ̇ ] = E 2 16 Esercizio 8 Un sistema materiale, mobile nel piano verticale Oxy con assi di versori ıˆ e ˆ (come in figura), è costituito da un’asta omogenea AB di lunghezza 2` e massa m e da un disco omogeneo di massa m e raggio α` (α > 0). Il disco è vincolato a rotolare senza strisciare sull’asse y (come in figura), mentre l’asta ha l’estremo A incernierato nel centro del disco e l’estremo B vincolato a scorrere sull’asse x. Preso come parametro lagrangiano ϕ angolo che l’asta AB forma con l’asse y 1 - determinare il centro di istantanea rotazione dell’asta e le equazioni cartesiane della base e della rulletta, disegnandone i grafici. Sapendo che sul sistema agisce la forza peso e sul disco una coppia di momento M = (B − A) ∧ mg ˆ , π 2 - determinare per quale valore di α la configurazione ϕ = è di equilibrio 6 e studiare la stabilità di tale configurazione; 3 - determinare le reazioni vincolari statiche esterne ed interne in tale configurazione; 4 - determinare l’energia meccanica del sistema y A ϕ O B 26 x Soluzione dell’Esercizio 8 1. Considerazioni generali Il sistema è olonomo a un grado di libertà. I vincoli sono fissi e bilaterali. In funzione del parametro lagrangiano i punti A, B e G (baricentro dell’asta) hanno coordinate A = (α`, 2` cos ϕ) , B = (α`+2` sin ϕ, 0) , G = (α`+` sin ϕ, ` cos ϕ) la velocità angolare dell’asta è ωa = ϕ̇ˆ ı ∧ ˆ mentre la velocità angolare del disco ωd si ottiene osservando che, per il vincolo di rotolamento senza strisciamento, H (punto di contatto del disco con l’asse y è centro di istantanea rotazione, quindi vA = ωd ∧ (A − H) ⇒ −2` sin ϕϕ̇ˆ = ωd ∧ α`ˆ ı ⇒ ωd = − 2 sin ϕϕ̇ˆ ı ∧ ˆ α mentre le forze attive si scrivono mg = −mg ˆ M = 2mg` sin ϕˆ ı ∧ ˆ , 2. Primo quesito Per la determinazione del centro di istantanea rotazione C dell’asta, ricordando che vP = ωa ∧ (P − C), è sufficiente osservare che B si muove sull’asse x e che A si muove sulla retta x = α` e quindi (vedi figura) da (C − A) k ıˆ , (C − B) k ˆ si ha xC = xB = α` + 2` sin ϕ , yC = yA = 2` sin ϕ (10) Eliminando il parametro ϕ da (10) si ha l’equazione della base (x − α`)2 + y 2 = 4`2 Rispetto al riferimento solidale al sistema Ax0 y 0 (come in figura) le coordinate di C sono x0C = 2` sin2 ϕ = `(1 − cos 2ϕ) , 0 yC = 2` sin ϕ cos ϕ = ` sin 2ϕ Eliminando il parametro ϕ da (11) si ha l’equazione della rulletta (x0 − `)2 + y 02 = `2 27 (11) y y C H A base rulletta j O B x x 3. Secondo quesito Avendo il sistema un solo grado di libertà ed essendo le forze arrive conservative, le configurazioni di equilibrio sono quelle che rendono stazionario il potenziale. Il potenziale della forza peso è −mgyA − mgyG = −3mgl cos ϕ, per determinare il potenziale delle forze attive calcoliamo il lavoro elementare compiuto dalla coppia di momento M dLM = = ı ∧ ˆ ) 2mg` sin ϕˆ ı ∧ ˆ · (− α2 sin ϕdϕˆ mgl 2 mg`(cos 2ϕ − 2)dϕ = d[ (sin 2ϕ − 2ϕ)] α α Quindi il potenziale delle forze attive è U (ϕ) = −mg`[3 cos ϕ + 1 (2ϕ − sin 2ϕ)] + cost. α I valori che rendono stazionario il potenziale sono soluzione dell’equazione U 0 (ϕ) = mg`(3 sin ϕ − U 0 ( π6 ) = 0 se 3 2 21 mg`( − + ) 2 α α2 2 2 + cos 2ϕ) = 0 α α ⇒ α= 2 3 Per studiare la stabilità della posizione di equilibrio calcoliamo la derivata seconda del potenziale con α = 32 U 00 (ϕ) = mg`(3 cos ϕ − 6 sin 2ϕ) 28 e per ϕ = π 6 √ π 3 3 mgl U ( )=− 6 2 00 ⇒ equilibrio stabile 4. Terzo quesito Per il Principio delle Reazioni Vincolari, ΦH ΦHx ıˆ + ΦHy ˆ ΦB = ΦB ˆ reazione esterna in H, reazione esterna in B, ΦA = ΦAx ıˆ + ΦAy ˆ reazione interna in A. La seconda equazione cardinale per il disco con polo A e la prima equazione cardinale della statica per l’intero sistema permettono di determinare le reazioni vincolari esterne M + ΦH ∧ (A − H) = 0 2mg + ΦH + ΦB = 0 All’equilibrio M = mg`ˆ ı ∧ ˆ , proiettando sugli assi si ottiene ı = 0 ⇒ ΦHy = 23 mg ı ∧ ˆ + ΦHy ˆ ∧ 32 `ˆ mg`ˆ ΦHx = 0 ΦHy + ΦB = 2mg ⇒ ΦB = 12 mg Per determinare la reazioni vincolare interna, la prima equazione cardinale applicata all’asta fornisce mg + ΦA + ΦB = 0 ⇒ ΦA = 1 mg ˆ 2 5. Quarto quesito Per calcolare l’energia cinetica del sistema calcoliamo separatamente l’energia cinetica dell’asta e del disco. Per l’asta AB, applicando il teorema di König si ha TAB = 1 1 3 2 2 2 mvG + IG ϕ̇ = m`2 ϕ̇2 2 2 3 Il disco ruota attorno all’asse ortogonale al piano xy passante per H 2 1 3 1 sin ϕϕ̇ = 3m`2 sin2 ϕϕ̇2 Tdisco = IH 2 3 quindi l’energia meccanica del sistema è 2 E = TAB + Tdisco − U = m`2 [ + 3 sin2 ϕ]ϕ̇2 + 3mgl[cos ϕ + ϕ − sin 2ϕ]. 3 29 Esercizio 9 Un sistema materiale, costituito da un’asta omogenea di massa m e di lunghezza 8R e da un disco omogeneo di uguale massa m e raggio R, è mobile nel piano verticale Oxy con assi di versori ıˆ e ˆ (come in figura). Il sistema è cosı̀ vincolato π i - l’asta ha un’inclinazione costante α = rispetto all’asse x e il suo baricentro 6 M scorre su tale asse; ii - il disco rotola senza strisciare sull’asta ed ha il baricentro G vincolato a scorrere sull’asse y. √ 3mg Oltre alla forza peso sul sistema agisce una forza elastica Fe = − (M − O) R applicata in M . Preso come parametro lagrangiano ξ in modo che (H − M ) = ξ vers(B − A), essendo H il punto di contatto tra il disco e l’asta, 1 - determinare il centro di istantanea rotazione del disco, le equazioni cartesiane di base e rulletta e disegnarne i grafici; 2 - determinare la configurazione di equilibrio del sistema e le reazioni vincolari esterne in tale configurazione; 3 - scrivere l’energia meccanica del sistema. y G B H x a O M A 30 x Soluzione dell’Esercizio 9 1. Considerazioni generali Il sistema è olonomo a un grado di libertà. I vincoli sono fissi. Il parametro lagrangiano ξ varia nell’intervallo [−4R, 4R]. In funzione del parametro lagrangiano i punti H, M e G hanno coordinate √ √ R ξ R − 3ξ ξ + 3R H =( , ) , M =( , 0) , G = (0, ) 2 2 2 2 L’asta trasla, per determinare la velocità angolare del disco osserviamo che vG = vH + ω ∧ (G − H) e, per il vincolo di rotolamento senza strisciamento, vH = vM quindi √ 3˙ ξ̇ ξ̇ ˆ = − ξ ıˆ + ω(ˆ ı ∧ ˆ ) ∧ (G − H) ⇒ ω = − ıˆ ∧ ˆ 2 2 R mentre le forze attive si scrivono mg = −mg ˆ Fe = , √ mg (R − 3ξ)ˆ ı 2 2. Primo quesito Per la determinazione del centro di istantanea rotazione C del disco, ricordando che vP = ω ∧ (P − C), è sufficiente osservare che G si muove sull’asse y e che vH k ıˆ e quindi (vedi figura) da (C − G) k ıˆ , (C − H) k ˆ si ha xC = xH R = 2 , yC = yG = ξ+ √ 3R 2 L’equazione della base R 2 Per determinare la rulletta, osserviamo che, durante il moto, |C − G| = R R 2 , quindi la rulletta è la circonferenza di centro G e raggio 2 . Preso 0 0 un sistema di assi cartesiani Gx y solidali con il disco, l’equazione della rulletta è x= x02 + y 02 = 31 R2 4 base y rulletta C G B H x a M x O A 3. Secondo quesito Avendo il sistema un solo grado di libertà ed essendo le forze arrive conservative, le configurazioni di equilibrio sono quelle che rendono stazionario il potenziale. √ √ 3mg mg 3 3 2 U (ξ) = −mgyG − |M − O|2 = [ξ − ξ ] + cost. 2R 4 2R I valori che rendono stazionario il potenziale sono soluzione dell’equazione √ mg 3 3 0 U (ξ) = [1 − ξ] = 0 4 R L’unica posizione di equilibrio è √ 3 ξ= R 9 Per il Principio delle Reazioni Vincolari, ΦG = ΦG ıˆ 32 , ΦM = ΦM ˆ La prima equazione cardinale della statica per l’intero sistema permettono di determinare le reazioni vincolari esterne 2mg − Fe (ξe ) + ΦG + ΦM = 0 Poiché all’equilibrio Fe (ξe ) = 31 mg ıˆ , proiettando sugli assi si ottiene ΦG = 1 mg ıˆ 3 , ΦM = 2mg ˆ 4. Terzo quesito Per calcolare l’energia cinetica del sistema calcoliamo separatamente l’energia cinetica dell’asta e del disco. L’asta AB trasla 1 3 Tasta = m[vM ]2 = mξ˙2 2 8 Per il disco, applicando il teorema di König si ha Tdisco = 1 3 ξ˙2 1 2 1 mR2 ξ˙2 3 1 2 mvG + IG = mξ̇ + = mξ˙2 2 2 2 2 R 8 2 2 R 8 quindi l’energia meccanica del sistema è √ 3 ˙2 mg 3 3 2 E = Tasta + Tdisco − U = mξ − [ξ − ξ ]. 4 4 2R 33