UNIVERSITÀ DEGLI STUDI DI ROMA
TOR VERGATA
FACOLTÀ DI INGEGNERIA
CORSO DI LAUREA IN INGEGNERIA
DELL'AUTOMAZIONE
A.A. 2011/2012
Tesi di Laurea
MODELLAZIONE E SISTEMA DI CONTROLLO CON
ANTI-WINDUP PER IL FRASCATI TOKAMAK
UPGRADE
RELATORE
CANDIDATO
Ing. Daniele Carnevale
Moreno Mattia
CORRELATORI
Prof. Luca Zaccarian
Ing. Luca Boncagni
Ai miei genitori
Alle persone a me più care
Indice
Ringraziamenti
1
Introduzione
3
1 Fusione nucleare e macchina Tokamak
6
1.1 Fusione nucleare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.2 Frascati Tokamak Upgrade . . . . . . . . . . . . . . . . . . . . . . . .
9
1.2.1 Principi sici di creazione e connamento magnetico del plasma 12
1.2.2 Struttura e funzionamento di un Tokamak . . . . . . . . . . .
2 Identicazione
15
18
2.1 Sistema da identicare . . . . . . . . . . . . . . . . . . . . . . . . . .
18
2.2 Denizione del sistema . . . . . . . . . . . . . . . . . . . . . . . . . .
21
2.3 Elaborazione dei segnali . . . . . . . . . . . . . . . . . . . . . . . . .
27
2.4 Identicazione grey-box e risultati ottenuti . . . . . . . . . . . . . . .
29
2.4.1 Identicazione coils V, F, T . . . . . . . . . . . . . . . . . . .
30
2.4.2 Identicazione coil H . . . . . . . . . . . . . . . . . . . . . . .
35
2.4.3 Identicazione della corrente di plasma . . . . . . . . . . . . .
36
2.4.4 Commenti sui risultati ottenuti . . . . . . . . . . . . . . . . .
40
2.5 Metodologia PEM . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
INDICE
I
INDICE
3 Modellazione del Plasma
44
3.1 Controllo di posizione orizzontale del plasma . . . . . . . . . . . . . .
44
3.1.1 Blocco PID . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
3.1.2 Attuatore F . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
3.1.3 Modello del plasma . . . . . . . . . . . . . . . . . . . . . . . .
49
3.1.4 Compensatore anti-windup . . . . . . . . . . . . . . . . . . . .
50
3.2 Identicazione del modello di plasma . . . . . . . . . . . . . . . . . .
52
3.2.1 Identicazione del modello di plasma attraverso un modello
dinamico discreto . . . . . . . . . . . . . . . . . . . . . . . . .
52
3.2.2 Simulazione dei modelli identicati . . . . . . . . . . . . . . .
60
3.2.3 Identicazione del modello di plasma attraverso mappa statica
66
4 Conclusioni e sviluppi futuri
75
77
Elenco delle gure
95
Bibliograa
98
INDICE
II
Ringraziamenti
Per l'ideazione e la creazione di questa tesi un ringraziamento va in primis al mio relatore, l'Ing. Daniele Carnevale che con la sua competenza è stato una guida costante,
presente e soprattutto disponibile. Grazie anche al Prof. Luca Zaccarian non solo
per aver partecipato con la sua conoscenza a questo lavoro, ma anche per la vicinanza mostrata in questi cinque anni. Un ringraziamento ai docenti del dipartimento
di ingegneria dell'automazione, i quali hanno contribuito nel corso di questi anni al
raggiungimento di un traguardo tanto importante per me sia da un punto di vista
culturale che umano.
Un grazie di cuore ai miei colleghi di corso, persone speciali che ho avuto la fortuna di
incontrare su questo cammino di crescita e con i quali ho potuto condividere, giorno
dopo giorno, i momenti dicili a cui un percorso come questo sottopone, ma soprattutto le grandi soddisfazioni per gli obiettivi ed i risultati raggiunti spalla a spalla:
senza di voi non sarebbe stato lo stesso.
Un ringraziamento particolare alla mia famiglia, persone speciali, presenza continua
che con la loro vicinanza hanno sempre sostenuto ogni mia scelta e che hanno condiviso con me il meglio ed anche il peggio.
Grazie a tutti i pezzi fondamentali di questo puzzle, per essermi stati vicino in questo
pezzo di strada che mi ha portato n qui. In ultimo, ma non di certo per importanza,
un ringraziamento speciale alla persona che più di tutti è stata al mio anco in questi
Introduzione
1
Introduzione
anni, con lei ho condiviso ogni singolo istante, momenti di gioia, di impegno e a volte
anche di sconforto, ma che con la sua presenza sono a riuscito a superare con serenità,
per questo: grazie di cuore.
Introduzione
2
Introduzione
Il crescente e continuo sviluppo tecnologico dell'ultimo secolo, ha avuto ed ha come
diretta conseguenza l'aumento del fabbisogno energetico mondiale. Le centrali a ssione nucleare ed i combustibili fossili quali petrolio, carbone e gas naturale, sono
oggi le principali fonti di energia.L'indiscusso vantaggio della reazione di ssione sta
nel fatto che l'ammontare di energia contenuta in una data quantità di combustibile
nucleare è milioni di volte superiore a quella contenuta in una pari quantità di un
combustibile chimico come la benzina. Questo rende la ssione nucleare una fonte di
energia molto appetibile, anche se i suoi prodotti di scarto sono altamente radioattivi,
e lo rimangono per migliaia di anni con un problema di smaltimento delle scorie.
I combustibili fossili sono, invece, una fonte non rinnovabile e soprattutto sono una
delle principali cause dell'inquinamento terrestre. Queste carenze hanno generato la
necessità di ricercare nuove fonti di energia. Di grande interesse è l'energia solare, che
attraverso i pannelli fotovoltaici è convertita in energia elettrica, senza l'emissione di
prodotti nocivi o inquinanti. Tali impianti, giunti oggi alla terza generazione, hanno
purtroppo l'inconveniente di avere un grosso ingombro e una produzione nettamente
inferiore rispetto a quella delle centrali nucleari a ssione.
Una valida alternativa nella produzione di energia è la fusione nucleare, dalla
quale si ottiene un'enorme quantità di energia, dovuta al difetto di massa tra reagenti
Introduzione
3
Introduzione
e prodotti della reazione. Quando due atomi si fondono, la loro massa non è più pari
alla somma delle masse dei due nuclei, ma minore; questa dierenza è trasformata in
energia secondo la ben nota legge di Einstein, la quale aerma che l'energia prodotta
è uguale alla massa per il quadrato della costante c, ovvero la velocità della luce:
300.000 Km/s.
L'importanza della fusione nucleare non consiste solo nel fatto che l'energia prodotta
risulta essere maggiore di quella che si può ottenere con la ssione nucleare, ma anche
nel fatto che è un energia pura, infatti, i prodotti radioattivi della fusione hanno un
tempo di dimezzamento di circa 12.3 anni. Gli elementi più idonei per la reazione di
fusione nucleare sono gli isotopi dell'idrogeno (Deuterio e Trizio) il quale è un elemento che sul nostro pianeta si può trovare facilmente e con i minimi costi.
Per poter fondere due nuclei è necessario che essi si trovino ad una distanza tale che
la forza di attrazione tra le masse superi la forza di repulsione che esiste tra i protoni.
Per fare questo, sono necessarie temperature elevatissime, circa cento milioni di gradi
che ancora oggi è quasi impossibile raggiungere.
Il Tokamak è una macchina di forma toroidale che attraverso il connamento magnetico di isotopi dell' idrogeno allo stato di plasma crea le condizioni necassarie anché
si verichi, al suo interno, la fusione termonucleare con lo scopo di estrarne l'energia
prodotta.
In questa tesi si aronteranno problematiche relative all'identicazione di alcune
dinamiche del Tokamak FTU (Frascati Tokamak Upgrade) presente nel centro ricerche
ENEA (Ente Nazionale per l'Energia e l'Ambiente) di Frascati. Con la prima parte
del lavoro ci si pone l'obiettivo di identicare un sistema lineare a tempo discreto
di equazioni alle dierenze, in grado di ricostruire la corrente erogata dagli attuatori
della macchina Tokamak (in gergo coils) e la corrente di plasma. Per sviluppare tale
Introduzione
4
Introduzione
modello è utilizzata una particolare strategia di identicazione, detta grey-box, che
permette di sfruttare la conoscenza sica dell'impianto per migliorare il processo di
stima.
Uno degli attuatori del Tokamak, la coil F, è inserito all'interno di uno schema di
controllo in feedback, dotato anche di compensatore anti-windup, preposto alla correzione della posizione orizzontale della colonna di plasma. Il problema arontato
nella seconda parte della tesi è quello di stimare un sistema lineare a tempo discreto, in grado di ricostruire il valore della variazione del usso magnetico orizzontale,
necessario per il corretto funzionamento del compensatore anti-windup presente nello
schema di controllo in feedback dell'attuatore F.
Introduzione
5
Capitolo 1
Fusione nucleare e macchina Tokamak
In questo capitolo verranno brevemente riassunti alcuni concetti
basilari della fusione nucleare e sul connamento magnetico del
plasma.
1.1 Fusione nucleare
La fusione nucleare è una reazione dalla quale è possibile produrre energia: nuclei di
massa molto piccola sono combinati per formare una nuova particella la cui massa è
minore della somma della masse dei nuclei reagenti. La massa mancante si trasforma
in energia secondo la ben nota equazione di Einstein:
E = (mr − mp ) c2
(1.1.1)
dove con E si indica l'energia ottenuta dalla fusione, con mr la massa dei nuclei
reagenti, con mp la massa dei nuclei dopo la reazione e con c la velocità della luce.
In questo processo di trasformazione, durante il quale viene liberata una grande
quantità di energia , gli atomi devono avvicinarsi no a distanze dell'ordine di 10−11 m
e anché ciò sia possibile i nuclei devono avere suciente energia cinetica per compensare la repulsione coulombiana e portarsi così a contatto. Per fare in modo che
ciò avvenga sono necessarie temperature dell'ordine dei 108 K . È da notare che la
6
Cap. 1
Fusione nucleare e macchina Tokamak
1.1
Fusione nucleare
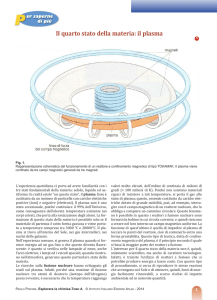
Figura 1.1: Illustrazione della reazione di fusione termonucleare
temperatura eettivamente presente all'interno delle stelle è minore rispetto a quella
che si deve ottenere in laboratorio, infatti la maggior densità di atomi fa sì che le
reazioni avvengano con una maggior probabilità.
Più del 99 % della materia conosciuta dell'universo è composta da plasma. Esso è
composto da elettroni e ioni che si muovono indipendentemente e non sono più legati
gli uni agli altri; per questo il plasma è considerato il quarto stato della materia ed è,
quindi, distinto dagli stati solido, liquido e gassoso.
Le problematiche legate alla produzione di energia con la tecnica della fusione
risiedono nello sviluppo di un dispositivo in grado di riscaldare il plasma a temperature
così elevate e di riuscire successivamente a connarlo stabilmente per un periodo di
tempo sucientemente ampio da permettere il rilascio di una quantità di energia
maggiore di quella impiegata per il riscaldamento del combustibile. Ad oggi, sono state
sviluppate tre dierenti tecniche: connamento magnetico, connamento inerziale e
connamento gravitazionale.
Il connamento magnetico sfrutta una delle proprietà più importanti del plasma:
la sua conducibilità elettrica. Le cariche elettriche libere fanno sì che esso sia un
buon conduttore di elettricità e che risponda fortemente ai campi elettromagnetici.
7
Cap. 1
Fusione nucleare e macchina Tokamak
1.1
Fusione nucleare
L'interazione tra le particelle del plasma cariche elettricamente ed il campo magnetico
prodotto da sorgenti esterne permette di connare il plasma in una regione denita e
limitata dello spazio.
Nelle macchine Tokamak, progettate per poter riprodurre sulla terra la fusione
termonucleare, è utilizzato il connamento magnetico, in quanto più semplice da
implementare e più promettente tra i tre sopra citati.
Le principali reazioni nucleari prodotte sulla terra riguardano i nuclei leggeri di
alcuni elementi quali Deuterio e il Trizio due isotopi dell'idrogeno. Un isotopo è un
atomo di uno stesso elemento chimico, e quindi con lo stesso numero atomico (numero
di protoni nel nucleo), ma con dierente numero di massa (numero di neutroni nel
nucleo). Indicando con n il numero di neutroni, con 2 H il deuterio, con 3 H il trizio
e con He l'atomo di elio, è possibile ottenere quattro dierenti reazioni di fusione
nucleare:
H +3 H → 4 He + n + 17.6M eV
(1.1.2)
2
H +2 H → 3 He + n + 3.3M eV
(1.1.3)
H +2 H → 3 H + H + n + 4.0M eV
(1.1.4)
H +3 He → 4 He + H + n + 18.3M eV
(1.1.5)
2
2
2
si ricorda inoltre, che l'esponente a sinistra del simbolo chimico indica il numero
di massa dell'elemento.
La reazione che si intende utilizzare per la produzione di energia elettrica è la 1.1.2.
8
Cap. 1
Fusione nucleare e macchina Tokamak
1.2
Frascati Tokamak Upgrade
Tuttavia per gli esperimenti eseguiti su FTU, non avendo come obiettivo la produzione
di energia elettrica, si preferisce utilizzare il solo deuterio. Usando, quindi, le 1.1.3,
1.1.4 si evita l'utilizzo del trizio: elemento radioattivo, raro in natura e quindi costoso;
al contrario il deuterio è presente abbondantemente nell'acqua di mare avendo infatti
una concentrazione dell'ordine di 1 atomo per 6500 atomi di hydrogeno.
La fusione nucleare ha un enorme potenziale: da 100 mg di deuterio e 150 mg di trizio
è possibile ottenere la stessa energia di 1100 l di olii combustibili.
1.2 Frascati Tokamak Upgrade
Il concetto di macchina Tokamak fu inventato negli anni '50 nell'Unione Sovietica
ed è ora l'approccio di connamento magnetico del plasma più promettente. La
parola Tokamak è un acronimo del nome russo TOroidal KAmera and MAgnitnaya
KAtushka che tradotto signica camera toroidale a bobine magnetiche.
Il Tokamak è un apparato sperimentale di forma toroidale per il connamento del
plasma mediante l'utilizzo di intensi campi magnetici.
Il Tokamak presente a Frascati FTU (Frascati Tokamak Upgrade) è una macchina
dalla modeste dimensioni, basti pensare che l'anello toroidale ha un raggio maggiore
di circa 1 m e un raggio minore di circa 30 cm. Altri impianti quali il JET ed
ITER hanno dimensioni maggiori poiché dovranno essere i padri dei futuri reattori.
Nonostante FTU sia una macchina di dimensioni ridotte per il suo funzionamento
sono necessari numerosi sotto impianti distribuiti in ben due edici, in particolare
uno dei due contiene le apparecchiature destinate all'alimentazioni del Tokamak. Per
dare un ordine di grandezza basta dire che il più piccolo dei convertitori è in grado di
fornire in uscita correnti pari a ±12.5 kA e tensioni di ±5 kV . Nel secondo edicio è
invece collocata la macchina stessa con tutte le apparecchiature di controllo (tra cui
9
Cap. 1
Fusione nucleare e macchina Tokamak
1.2
Frascati Tokamak Upgrade
la control-room) e acquisizione dati.
Figura 1.2: Foto dell'impianto FTU. A sinistra la camera da vuoto prima di essere circondata dagli avvolgimenti elettrici. A destra l'impianto dall'esterno, le
apparecchiature visibili sono i sistemi di surriscaldamento addizionale ad onde
elettromagnetiche
FTU si compone di tre sottoimpianti principali:
• una camera da vuoto toroidale che deve contenere la colonna di plasma. Tale
camera presenta 12 porte equatoriali, 12 porte verticali e 24 porte tubolari,
per l'accesso al suo interno da parte dei sistemi di riscaldamento addizionale a
radiofrequenza e delle diagnostiche per la misura di tutti i parametri d'interesse;
• una parte elettrica, costituita principalmente dagli attuatori utilizzati per la
generazione dei campi magnetici necessari per la formazione ed il connamento
del plasma;
• antenne a radiofrequenza per il riscaldamento addizionale del plasma.
Prima di analizzare il funzionamento della macchina Tokamak si introduce la
seguente terminologia rappresentata anche in gura 1.2
10
Cap. 1
Fusione nucleare e macchina Tokamak
1.2
Frascati Tokamak Upgrade
Figura 1.3: Denizione della terminologia toroidale
• si dice piano poloidale ogni piano a cui appartenga l'asse di rotazione del toroide,
e si indica con sezione poloidale, o più semplicemente sezione del toroide, ogni
supercie di intersezione tra il piano poloidale e il toroide;
~ , si dice componente poloidale di A
~ la sua proiezione
• dato un vettore applicato A
sul piano poloidale passante per il punto di applicazione di A~ ;
• si dice direzione toroidale ogni circonferenza che ha il centro sull'asse del toroide
ed è ortogonale all'asse stesso;
~ , si dice componente toroidale di A
~ la sua proiezione
• dato un vettore applicato A
sulla tangente alla direzione toroidale passante per il punto di applicazione di A~
• un campo vettoriale si dice campo poloidale se ognuna delle sue linee di campo è
contenuta su un piano poloidale, campo toroidale se ognuna delle linee coincide
con una direzione toroidale;
• si denisce raggio maggiore R la distanza tra il centro di una sezione poloidale
e l'asse del toroide;
11
Cap. 1
Fusione nucleare e macchina Tokamak
1.2
Frascati Tokamak Upgrade
• si denisce raggio minore a la distanza tra il centro di una sezione poloidale e
la superfcie del toroide.
1.2.1 Principi sici di creazione e connamento magnetico del
plasma
Il successo del connamento magnetico del plasma è principalmente dovuto al fatto
che quest'ultimo può essere visto come una spira chiusa sulla quale viene indotta una
corrente attraverso una campo magnetico variabile nel tempo. La legge di FaradayNewmann-Lenz impone che nel circuito si generi una forza elettromotrice indotta pari
all'opposto della variazione temporale del usso del campo magnetico.
I
E · ds = −
dφ
dt
(1.2.1)
Questa relazione permette di individuare la corrente che scorre all'interno della
spira di plasma. Una volta individuata l'intensità della corrente, si sfruttano le leggi
dell'elettromagnetismo per riuscire a posizionarlo all'interno della camera toroidale.
Per ottenere, quindi, il risultato desiderato, vengono applicati diversi campi magnetici.
L'interazione di questi ultimi da origine ad una serie di linee di campo che, avendo
una forma elicoidale, letteralmente avvolgono il plasma. Le leggi che permettono tale
connamento e tramite le quali si riesce a calibrare i campi magnetici, derivano dalla
legge di Lorentz, la quale aerma che una carica q , con velocità v , che si muove in un
~ , è sottoposta ad una forza data dalla relazione 1.2.2
campo magnetico B
~
F~ = q · ~v × B
(1.2.2)
Essendo fondamentalmente q · v una corrente, si può facilmente calcolare la forza
necessaria a bilanciare gli spostamenti del plasma. Sono dunque i campi magnetici
12
Cap. 1
Fusione nucleare e macchina Tokamak
1.2
Frascati Tokamak Upgrade
ad indurre la corrente all'interno del plasma ed il suo connamento.
Il problema del connamento sembrerebbe pertanto ridursi a garantire che le particelle orbitino intorno a linee di campo chiuse e che l'intensità di tale campo sia
tale da rendere sucientemente piccolo il raggio della colonna di plasma in modo
da poter innescare la fusione nucleare. Tale obiettivo risulta facilmente ottenibile
con una macchina a congurazione toroidale come il Tokamak: generando un cam~ tor all'interno della camera, si riesce a fare in modo
po magnetico chiuso toroidale B
che le particelle seguano orbite contenute in uno spazio limitato. Tuttavia, il campo
~ tor non riesce da solo a garantire il connamento delle partimagnetico toroidale B
celle, dal momento che queste, per le caratteristiche del campo magnetico stesso, sono
soggette a componenti di velocità additive, dette velocità di deriva, che ne alterano
le traiettorie. Una parte della velocità di deriva delle particelle è dovuta al fatto che
~ tor non è rettilineo, ma presenta una certa curvatura, che può
il campo toroidale B
variare a seconda della linea di campo considerata. Un'altra componente è prodotta
~ tor . Tale disomogeneità è dovuta al
dalla disomogeneità radiale del campo toroidale B
~ tor viene generato ricoprendo esternamente la camera toroidale
fatto che il campo B
di avvolgimenti poloidali, in modo da ingabbiarla in un solenoide chiuso ad anello
in cui scorre una corrente elettrica. Poiché sulla parete interna della camera (quella
più prossima all'asse toroidale) la densità di spire del solenoide è maggiore di quella
~ tor all'interno della camera
sulla parete periferica, l'intensità del campo magnetico B
decresce radialmente, ossia al crescere della distanza dall'asse del toroide. La velocità
di deriva ha quindi l'eetto di spostare in direzione verticale le particelle che, soprattutto se dotate di elevata velocità, come nel caso dei plasmi di interesse fusionistico,
possono perdere il connamento no a urtare la parete della camera toroidale. Si può
dimostrare come, per superare tale dicoltà, sia suciente combinare al campo mag13
Cap. 1
Fusione nucleare e macchina Tokamak
1.2
Frascati Tokamak Upgrade
~ tor un campo magnetico poloidale B
~ p , ossia un campo avente linee di
netico toroidale B
forza chiuse, tipicamente circolari, ognuna delle quali giace su un piano poloidale. Il
~ =B
~ tor + B
~ p così generato, essendo somma di un campo poloidale
campo magnetico B
e di uno toroidale, avrà delle linee di campo costituite da curve che si avvolgono ad
elica su superci di forma toroidale. In gura 1.2.1 si riportano le linee del campo
magnetico totale.
Figura 1.4: Linee di campo magnetico totale
Riassumendo si ha dunque:
• il campo magnetico toroidale, generato per mezzo di bobine toroidali, perme-
tte di generare un campo diretto all'asse di simmetria del toro che vincola le
particelle cariche a uire lungo quella direzione;
• il campo magnetico verticale, generato per mezzo di bobine, permette il controllo
della posizione del plasma all'interno del toro.
• il campo magnetico poloidale, generato dal plasma stesso, evita la deriva delle
particelle del plasma verso le pareti della camera.
14
Cap. 1
Fusione nucleare e macchina Tokamak
1.2
Frascati Tokamak Upgrade
1.2.2 Struttura e funzionamento di un Tokamak
Come già evidenziato, il nucleo di un Tokamak è costituito dalla camera toroidale, all'interno della quale, viene generato e connato il plasma per mezzo di campi magnetici
indotti da avvolgimenti esterni alla camera stessa in cui circolano opportune correnti.
Per garantire il connamento, come già detto, è necessario generare due campi mag~ tor e un campo magnetico di intensità minore B
~ p . Il campo toroidale B
~ tor , di
netici: B
seguito indicato con S, è prodotto mediante un avvolgimento a spirale posto all'esterno della camera. In tale avvolgimento scorre la corrente Itor , costante nel tempo, che
~ tor . Per meglio comprendere i
genera all'interno della camera il campo magnetico B
campi prodotti si faccia riferimento alla gura 1.5. Introducendo, invece, una cor-
Figura 1.5: Schema delle correnti e dei campi generati in un Tokamak
~p
rente di plasma Ip all'interno della camera da vuoto, si ottiene un campo poloidale B
che a sua volta induce il campo poloidale desiderato. Per ottenere ciò si introduce,
al centro della macchina nel buco del toroide, un avvolgimento solenoidale verticale
che in seguito verrà indicato con T. Tale avvolgimento funziona da primario di un
trasformatore dove il secondario è appunto la spira di plasma generata all'interno della camera. Facendo scorrere all'interno dell'avvolgimento T una corrente IT , crescente
~ T avente
linearmente con il tempo, viene generato un campo magnetico poloidale B
stessa dinamica di IT le cui linee di campo avvolgono la camera toroidale. Essendo
15
Cap. 1
Fusione nucleare e macchina Tokamak
1.2
Frascati Tokamak Upgrade
il plasma un conduttore a tutti gli eetti, per la legge di Faraday-Neuman-Lenz,
~ T generato dal primario
la variazione costante del usso magnetico φt del campo B
del trasformatore (avvolgimento centrale) e concatenato con il secondario, induce su
questo una forza elettromotrice, f.e.m, e quindi una corrente di plasma IP che si può
considerare costante. La corrente IP , così generata, a sua volta induce nel plasma
~ P . La sua
un altro campo magnetico poloidale, che è appunto il campo desiderato B
intensità dipende ovviamente dall'intensità della corrente di plasma, e dunque dalla
corrente di trasformatore IT .
~ P in tale modo si apportano alcuni vantaggi rispetto ad
Generando il campo B
altre soluzioni magnetiche toroidali tra cui:
• il Tokamak risulta di più facile costruzione grazie al fatto che il campo totale
generato risulta simmetrico rispetto all'asse toroidale;
• poiché il plasma ha una resistenza RP non nulla, viene a generarsi quello che
viene detto riscaldamento ohmico. A causa della generazione della corrente
IP , viene dissipata per eetto Joule una potenza termica pari circa a RP IP2 ,
fornendo una notevole parte del riscaldamento necessario al raggiungimento delle
condizioni fusionistiche.
In conclusione si possono riassumere le principali fasi per la generazione del plasma
all'interno della camera da vuoto:
1. mediante apposite pompe da vuoto viene creato, all'interno della camera, il
vuoto spinto o il vuoto ultraspinto;
2. viene fatta scorrere corrente all'interno delle bobine che generano il campo
toroidale;
16
Cap. 1
Fusione nucleare e macchina Tokamak
1.2
Frascati Tokamak Upgrade
3. viene immessa all'interno della camera una determinata quantità di gas, generalmente una miscela di idrogeno e dei suoi isotopi, in funzione della densità di
plasma richiesta;
4. viene fatta scorrere corrente nell'avvolgimento T;
5. viene fatta calare rapidamente la corrente di trasformatore IT creando così una
forza elettromotrice in grado di ionizzare parte degli atomi neutri che liberano
quindi elettroni;
6. gli elettroni liberi formano una scarica, a causa dei campi magnetici. Tali elettroni diventano via via più numerosi per i repentini scontri tra atomi neutri e
elettroni;
7. il gas non essendo più neutro, grazie a elettroni liberi presenti al suo interno,
diventa plasma. A questo punto la corrente elettrica, per eetto Joule , riscalda
il plasma a temperature molto elevate, sebbene non sucienti.
Infatti un limite a questo tipo di riscaldamento è dovuto al fatto che, all'aumentare
della temperatura, la resistenza ohmica del plasma diminuisce. Di conseguenza,
per il raggiungimento delle condizioni fusionistiche, occorre un riscaldamento supplementare, ottenuto inserendo all'interno del plasma particelle ad alta energia e attraverso irraggiamento di campi elettromagnetici alla frequenza di risonanza con di
antenne a radiofrequenza.
17
Capitolo 2
Identicazione
In questo capitolo viene presentato lo sviluppo dell'identicazione
del sistema Tokamak; viene stimato un modello che permette di
ricostruire le correnti misurate sulle bobine di alimentazione e la
corrente di plasma a partire dalle correnti richieste agli attuatori.
L'identicazione del modello è realizzata attraverso una metodologia
grey-box, ovvero la struttura delle matrici A, B, C, D è nota e
l'identicatore dovrà stimare solo alcuni elementi di esse.
2.1 Sistema da identicare
La macchina Tokamak, come già spiegato nel capitolo 1, è composta da una camera da
vuoto di forma toroidale opportunamente circondata da bobine, conduttori e magneti
(ovvero le coils) i quali permettono la creazione ed il connamento del plasma. In
~ tor e quattro
FTU è presente una coils, S, per la generazione del campo toroidale B
coils V, F, T, H, preposte alla correzione della posizione del plasma e all'induzione
della corrente IP LA . Per la generazione del campo principale di connamento toroidale
~ tor , la camera da vuoto è circondata da un magnete composto da 12 moduli in acciaio
B
inossidabile ciascuno dei quali contiene due avvolgimenti in rame in cui scorre una
corrente continua Itor di valore massimo pari a 37.8 kA. Al centro del toroide, con
funzione di primario, viene posto un avvolgimento (coil T) con struttura a solenoide,
18
Cap. 2
Identicazione
2.1
Sistema da identicare
denominato T (Transformer), in cui scorre una corrente IT con valore massimo di
24.5 kA, il quale è responsabile della generazione della corrente di plasma IP LA .
Figura 2.1: Struttura esterna FTU e avvolgimenti. A sinistra, in giallo, sono eviden~ tor , mentre
ziati i magneti preposti alla generazione del campo magnetico toroidale B
a destra sono schematizzati gli altri avvolgimenti preposti al controllo del plasma.
In gura 2.1 si mostra la struttura esterna della camera e la disposizione degli
avvolgimenti. Tre avvolgimenti di forma toroidale sono utilizzati per la generazione dei
restanti campi magnetici. Il campo magnetico utilizzato per il controllo della posizione
verticale, viene adato ad un avvolgimento costituito da due bobine di Helmholtz (coil
H), denominato H (Horizontal). Dato che in FTU, la posizione verticale del plasma
risulta stabile per costruzione, la corrente che attraversa tale avvolgimento risulta di
minore intensità con valore massimo pari a 1.2 kA. Per garantire, invece, la stabilità
e il controllo orizzontale del plasma, sono stati realizzati due avvolgimenti (coils V e
F) responsabili della generazione del campo verticale. Nell'avvolgimento V (Vertical)
può scorrere una corrente IV di modulo massimo pari a 25 kA e pendenza massima
di 254kA/s, mentre nell'avvolgimento F (Feedback) scorre una corrente IF di modulo
pari a 12.5 kA e pendenza massima pari a 830 kA/s. Tali dierenze di corrente e
pendenza massima sono legate al diverso utilizzo che ne viene fatto dal sistema di
controllo di posizione. Il campo BV , infatti, ha lo scopo di contrastare la naturale
19
Cap. 2
Identicazione
2.1
Sistema da identicare
espansione radiale del plasma ed il valore di corrente IV , a causa della lentezza di
risposta dell'amplicatore su V, viene essenzialmente precalcolato prima dell'esperimento e non posto in feedback. Al contrario, l'alimentatore che eroga corrente sulla
bobina F è grado di fornire correnti con una variazione molto più rapida, tuttavia
il campo verticale prodotto delle spire di F è circa 63/222 volte quello prodotto da
V. L'attuatore F (bobine+alimentatore), proprio la sua prontezza di risposta, viene
utilizzato per correggere in feedback la posizione orizzontale del plasma che può discostarsi dal suo riferimento durante l'esperimento a causa dei disturbi e variazioni sui
parametri.
Figura 2.2: Schema FTU
Si può quindi schematizzare FTU attraverso la gura 2.2. Una volta chiara la
struttura della macchina Tokamak, si può porre l'attenzione all'obiettivo principale
del presente capitolo: l'identicazione di FTU. Il nostro scopo è quello di identicare
un modello a tempo discreto del tipo:
x(k Ts + Ts ) = A x(k Ts ) + B u(k Ts )
(2.1.1a)
y(k Ts ) = C x(k Ts ) + D u(k Ts )
(2.1.1b)
in grado di mettere in relazione le quattro correnti di riferimento richieste alle coils
IV rif , IF rif , IT rif , IHrif con le quattro correnti eettivamente erogate IV , IF , IT , IH ,
più la corrente di plasma IP LA . Nei seguenti paragra verrà esposto il metodo e le
problematiche relative a tale identicazione.
20
Cap. 2
Identicazione
2.2
Denizione del sistema
2.2 Denizione del sistema
L'idea alla base del presente lavoro è quella di utilizzare la conoscenza parziale dell'impianto per realizzare una identicazione cosiddetta grey-box. Tipicamente, quando non si ha una buona conoscenza dell'impianto si realizzano identicazioni black-box
(scatola nera), ovvero viene stimato un sistema lineare in cui non si impone nessun
vincolo su nessun elemento delle matrici A, B, C, D (ad esclusione dell'ordine del
sistema). L'identicazione di tipo grey-box è, invece, caratterizzata dal fatto che la
struttura delle matrici A, B, C, D è nota e l'identicatore stimerà solo alcuni elementi
di queste matrici.
Come spiegato nel precedente paragrafo FTU, si compone sostanzialmente di quattro
coils per la creazione ed al connamento del plasma, il quale può essere considerato
come una semplice spira in cui è indotta una corrente elettrica. Per modellare tale
impianto si è quindi pensato di scrivere per ogni coil e per la corrente di plasma una
equazione dierenziale in grado di caratterizzarne la dinamica.
Di fatto, questi attuatori non sono altro che dei solenoidi in cui scorre una corrente
elettrica, quindi, senza scendere troppo nel dettaglio si può supporre che ogni coil
possa essere descritta da un semplice circuito RLC a cui è applicata una tensione
vin (t). Sotto tale ipotesi si può scrivere per la coil V (lo stesso vale anche per le altre
coils e per la colonna di plasma) la seguente equazione:
RV IV (t) + LV I˙V (t) + CV−1
Z
IV (τ ) dτ = vin (t).
(2.2.1)
Anché la corrente erogata sia il più vicina possibile alla corrente di riferimento, ogni
coil è dotata al proprio interno di un sistema feedback con controllore PID che trasforma l'errore sulla corrente in un comando in tensione, quindi, al posto del generico vin (t)
21
Cap. 2
Identicazione
2.2
Denizione del sistema
si può sostituire il segnale di controllo preveniente dal PID:
vin (t) = RV rif (IV rif (t) − IV (t)) + LV rif
Z
−1
I˙V rif (t) − I˙V (t) + CV rif IV rif (τ ) − IV (τ ) dτ
(2.2.2)
ottenendo
R̄V IV (t) + L̄V I˙V (t) +
C̄V−1
Z
IV (τ ) dτ = RV rif IV rif (t) + LV rif I˙V rif (t) +
CV−1rif
Z
IV rif (τ ) dτ
(2.2.3)
in cui IV (t) e IV rif (t) rappresentano rispettivamente la corrente erogata e la corrente
di riferimento della coil V, mentre tutti gli altri termini sono parametri costanti che
dovranno essere stimati.
Ora, per tenere in considerazione gli eetti di mutua induttanza che si vengono a
creare tra la coil in esame e le altre coils si aggiunge a secondo membro dell'equazione
2.2.3 il seguente termine:
X
Lx I˙x (t) + Cx−1
Z
Ix (τ ), dτ
con x = F, T, H, P lasma
x
ottenendo:
R̄V IV (t) + L̄V I˙V (t) + C̄V−1
Z
IV (τ ) dτ = RV rif IV rif (t) + LV rif I˙V rif (t) + CV−1rif
Z
IV rif (τ ) dτ +
Z
X
−1
˙
Lx Ix (t) + Cx
Ix (τ ) dτ
+
x
(2.2.4)
dove Ix rappresenta la corrente erogata dalle restanti coils e la corrente di plasma
(x = F, T, H, P lasma).
Derivando la 2.2.4 si ottiene inne:
R̄V I˙V (t) + L̄V I¨V (t) + C̄V−1 IV (t) = RV rif I˙V rif (t) + LV rif I¨V rif (t) + CV−1rif IV rif (t)+
X
+
Lx I¨x (t) + Cx−1 Ix (t)
x
(2.2.5)
22
Cap. 2
Identicazione
2.2
Denizione del sistema
Andando ora a scrivere la 2.2.5 anche per le restanti coils F, T, H, e per la corrente
di plasma, si ottiene un sistema di equazioni lineare del decimo ordine caratterizzato
dal seguente vettore di variabili di stato I :
IV
I˙V
IF
I˙F
IT
I˙T
IH
I˙H
I=
IP LA
I˙P LA
Notare che cinque delle dieci equazioni del sistema sono del tipo:
ẋ1 = x2 .
Quindi, per ottenere il classico sistema nella forma ẋ(t) = Ax(t) + Bu(t) è necessario manipolare algebricamente le cinque equazioni, scritte nella forma 2.2.5, che
descrivono la dinamica del sistema. Senza perdita di generalità, e solo per semplicità
espositiva, si illustreranno i passaggi algebrici necessari, ipotizzando che si abbiano
solamente due coils chiamate arbitrariamente coil 1 e coil 2, per cui si può scrivere:
a11 I1 + a12 I˙1 + a13 I¨1 = b11 I1r + b12 I˙1r + b13 I¨1r + c11 I2 + c12 I¨2
a21 I2 + a22 I˙2 + a23 I¨2 = b21 I2r + b22 I˙2r + b23 I¨2r + c21 I1 + c22 I¨1
(2.2.6)
da cui
a13 I¨1 − c13 I¨2 = −a11 I1 − a12 I˙1 + b11 I1r + b12 I˙1r + b13 I¨1r + c11 I2
a23 I¨2 − c23 I¨1 = −a21 I2 − a22 I˙2 + b21 I2r + b22 I˙2r + b23 I¨2r + c21 I1
(2.2.7)
Ora ricavando dalle 2.2.6 le espressioni di I¨1 e I¨2 e sostituendole nelle 2.2.7 ot˙
teniamo il sistema lineare I(t)
= A I(t) + B u(t), con I = [I1 , I˙1 , I2 , I˙2 ]T e u =
[I1r , I˙1r , I¨2r , I2r , I˙2r , I¨2r ]T , caratterizzato dalle seguenti matrici A e B:
23
Cap. 2
Identicazione
2.2
0
∗
A=
0
∗
0 0
∗ ∗
B=
0 0
∗ ∗
1
∗
0
∗
0
∗
0
∗
0
∗
1
∗
0
∗
0
∗
0
∗
0
∗
0
∗
0
∗
Denizione del sistema
(2.2.8)
0
∗
0
∗
(2.2.9)
dove con ∗ si intendono gli elementi che dovranno essere stimati.
Per la matrice B è necessario fare alcune considerazioni: in questa forma l'ingresso
del sistema è rappresentato dal vettore u = [I1r , I˙1r , I¨2r , I2r , I˙2r , I¨2r ]T . In realtà, come
detto in precedenza e come mostrato in gura 2.2, l'ingresso del sistema è dato dal
vettore u = [I1r , I2r ]T senza le derivate prima e seconda di ogni corrente Ii . Per
risolvere tale problema si sostituisce la matrice B espressa dalla 2.2.9 con la seguente
:
∗
∗
B=
0
0
0
0
∗
∗
(2.2.10)
Determinate le matrici A e B caratterizzanti il generico sistema di equazioni 2.2.6, si
può tornare ad analizzare l'impianto reale, la cui dinamica sarà descritta dal sistema:
in cui:
˙ = A I(t) + B u(t)
I(t)
(2.2.11)
I˙V
I¨V
I˙
F
I¨
F
˙
I
I˙ = ¨T
IT
˙
IH
I¨H
I˙P LA
I¨P LA
(2.2.12)
24
Cap. 2
Identicazione
2.2
IV
I˙V
IF
I˙F
IT
I˙T
IH
I˙H
I=
IP LA
I˙P LA
0
∗
0
∗
0
A=
∗
0
∗
0
∗
1
∗
0
∗
0
∗
0
∗
0
∗
0
∗
0
∗
0
∗
0
∗
0
∗
Denizione del sistema
0 0 0 0 0
∗ ∗ ∗ ∗ ∗
1 0 0 0 0
∗ ∗ ∗ ∗ ∗
0 0 1 0 0
∗ ∗ ∗ ∗ ∗
0 0 0 0 1
∗ ∗ ∗ ∗ ∗
0 0 0 0 0
∗ ∗ ∗ ∗ ∗
∗ 0 0 0
∗ 0 0 0
0 ∗ 0 0
0 ∗ 0 0
0 0 ∗ 0
B=
0 0 ∗ 0
0 0 0 ∗
0 0 0 ∗
∗ ∗ ∗ ∗
∗ ∗ ∗ ∗
IV rif
IF rif
u=
IT rif
IHrif
(2.2.13)
0
∗
0
∗
0
∗
0
∗
0
∗
0
∗
0
∗
0
∗
0
∗
1
∗
(2.2.14)
(2.2.15)
(2.2.16)
Prima di procedere con l'identicazione vera e propria, è necessario trasformare il
sistema a tempo continuo ottenuto in un sistema a tempo discreto. Per fare ciò si
25
Cap. 2
Identicazione
2.2
Denizione del sistema
approssima l'equazione dierenziale ẋ(t) = A x(t) come:
x((k + 1) Ts ) − x(k Ts )
= A x(k Ts )
Ts
(2.2.17)
x((k + 1) Ts ) = (A Ts + I)x(k Ts )
(2.2.18)
da cui
Dalla 2.2.18 si ottiene la forma della nuova matrice dinamica A del sistema a tempo
discreto:
1 Ts
∗ ∗
0 0
∗ ∗
0 0
A=
∗ ∗
0 0
∗ ∗
0 0
∗ ∗
0 0
∗ ∗
1 Ts
∗ ∗
0 0
∗ ∗
0 0
∗ ∗
0 0
∗ ∗
0 0
∗ ∗
0 0
∗ ∗
1 Ts
∗ ∗
0 0
∗ ∗
0 0
∗ ∗
0 0
∗ ∗
0 0
∗ ∗
0 0
∗ ∗
0 0
∗ ∗
1 Ts
∗ ∗
0 0
∗ ∗
0 0
∗ ∗
0 0
∗ ∗
1 Ts
∗ ∗
0 0
∗ ∗
(2.2.19)
Le uscite del sistema, come mostra la gura 2.2, sono le quattro correnti erogate
dalle coils più la corrente di plasma (y = [IV , IF , IT , IH , IP LA ]T ), le quali coincidono
con cinque delle dieci variabili di stato del sistema. L'equazione di uscita del sitema
2.1.1 è, quindi, caratterizzata dalle seguenti matrici:
1
0
C=
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
1
0
D=
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
1
0
0
1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
(2.2.20)
(2.2.21)
26
Cap. 2
Identicazione
2.3
Elaborazione dei segnali
La scelta di tale matrice D sarà chiarita nel paragrafo 2.4.
Il sistema appena presentato è il primo con cui si è tentato di stimare la dinamica del
Tokamak; purtroppo, però, le prestazioni ottenute non sono state soddisfacenti. Per
questo motivo si è deciso di dividere il problema identicando più sottomodelli come
sarà descritto nel paragrafo 2.4. Il lavoro appena presentato, è comunque alla base
delle successive identicazioni in quanto ogni sottomodello avrà la stessa struttura
delle matrici A, B, C, D esposte in questo paragrafo.
2.3 Elaborazione dei segnali
Il primo passo per iniziare l'identicazione del sistema è recuperare dal database di
FTU i segnali delle correnti richieste ed erogate dagli attuatori, più il segnale della
corrente di plasma, i quali devono essere opportunamente manipolati e ltrati per
essere utilizzati nel processo di identicazione.
Di seguito sono elencate e discusse le operazioni eseguite sui segnali utilizzati
nell'identicazione:
1. Selezione dell'intervallo di interesse: come si nota dalla gura 2.3 i segnali di
riferimento, in blu, e quelli reali, in rosso, hanno durate temporali diverse. L'identicazione prenderà in considerazione solamente l'intervallo in cui si ha la
presenza del plasma ovvero ∆t = [0, 2] sec.
2. Ricampionamento: anche se non può essere apprezzato dai graci, le correnti di
riferimento e la corrente di plasma sono campionate ad 1ms, mentre le correnti
erogate dagli attuatori sono campionate ogni 2ms. Scelto il tempo di campionamento Ts del sistema 2.1.1 è necessario ricampionare tutte le correnti alla
frequenza Ts−1 . Per compiere tale operazione è utilizzato il comando Matlab
27
Cap. 2
Identicazione
2.3
Elaborazione dei segnali
Figura 2.3: Segnali FTU sparo n.31906
interp1, il quale premette di selezionare il tipo di interpolazione da utilizzare.
In questo lavoro si è scelto di utilizzare l'interpolazione lineare.
3. Controllo del segno: come si può osservare dal secondo graco della gura 2.3
in alcuni casi la corrente di riferimento ha segno opposto rispetto la corrente
erogata; questa dierenza tra i due segnali deve essere corretta manualmente,
essendo semplicemente dovuta al verso di misura delle correnti.
4. Eliminazione dell'oset: a tutti i segnali è sommata una certa quantità x in
modo che al tempo t = 0 abbiano valore zero. In particolare x è il valore che il
28
Cap. 2
Identicazione
2.4
Identicazione grey-box e risultati ottenuti
segnale ha all'istante t = 0 prima della correzione.
5. Filtraggio dei segnali: come avviene in tutti i processi di misurazione, anche
le misure eettuate su FTU sono soggette a rumore, il quale se non opportunamente ltrato può compromettere il risultato dell'identicazione. Per ltrare i segnali si utilizza un semplice sistema del primo ordine con funzione di
trasferimento
F (s) =
1
τs+1
in cui τ è scelto in modo tale che vengano ltrate solo quelle componenti
frequenziali dovute al rumore.
Al termine di queste operazioni si ottengono i segnali mostrati in gura 2.4.
2.4 Identicazione grey-box e risultati ottenuti
L'obiettivo iniziale del presente lavoro era quello di ottenere un unico modello matematico lineare a tempo discreto con quattro ingressi e cinque uscite, come mostrato in
gura 2.5, che potesse descrivere l'intera dinamica del sistema, ovvero considerando
i segnali in tutto il loro intervallo temporale [0, 2]sec. Fin da subito si è riscontrato
l'identicazione con il modello descritto nella precedente sezione non produceva risultati soddisfacenti.
Per questo motivo si è deciso di suddividere il problema utilizzando più modelli. La
scelta è ricaduta in particolare su tre:
1. un modello che identichi la dinamica delle coils V,F,T;
29
Cap. 2
Identicazione
2.4
Identicazione grey-box e risultati ottenuti
Figura 2.4: Segnali ricampionati sparo n.31906
2. un secondo che identichi la dinamica della coil H;
3. ed in ultimo uno che identichi la dinamica della corrente di plasma.
La struttura delle matrici A, B, C, D di ogni modello è quella presentata nel
paragrafo 2.2.
2.4.1 Identicazione coils V, F, T
Per identicare l'andamento delle correnti negli attuatori V, F, T si è scelto un modello
del sesto ordine avente cinque ingressi:
30
Cap. 2
Identicazione
2.4
Identicazione grey-box e risultati ottenuti
Figura 2.5: Schema del sistema da identicare
• corrente di riferimento coil V: IV rif ;
• corrente di riferimento coil F: IF rif ;
• corrente di riferimento coil T: IT rif ;
• corrente erogata dalla coil H: IH ;
• corrente di plasma: IP la ;
e tre uscite:
• corrente misurata nella coil V: IV ;
• corrente misurata nella coil F: IF ;
• corrente misurata nella coil T: IT ;
IV
I˙V
IF
I=
I˙F
IT
I˙T
31
Cap. 2
Identicazione
2.4
Identicazione grey-box e risultati ottenuti
1 Ts 0 0 0 0
∗ ∗ ∗ ∗ ∗ ∗
0 0 1 T s 0 0
A=
∗ ∗ ∗ ∗ ∗ ∗
0 0 0 0 1 T s
∗ ∗ ∗ ∗ ∗ ∗
∗ ∗ ∗ ∗ ∗
∗ ∗ ∗ ∗ ∗
∗ ∗ ∗ ∗ ∗
B=
∗ ∗ ∗ ∗ ∗
∗ ∗ ∗ ∗ ∗
∗ ∗ ∗ ∗ ∗
0 1 0 0 0 0
C = 0 0 0 1 0 0
0 0 0 0 0 1
Figura 2.6: Segnali sparo n.31937
Per determinare la matrice D è necessario fare alcune considerazioni: osservando
la gura 2.6 si può notare come le correnti erogate dagli avvolgimenti siano, correttamente, molto simili alle correnti di riferimento richieste. Al loro interno, infatti, le
coils hanno dei sitemi di controllo feedback di tipo PID (sono quelli modellati nella vin (t) dei circuiti), che hanno appunto lo scopo di portare le correnti erogate alle
correnti di riferimento. Per questo si impone la seguente matrice D:
1 0 0 0 0
D = 0 1 0 0 0
0 0 1 0 0
(2.4.1)
32
Cap. 2
Identicazione
2.4
Identicazione grey-box e risultati ottenuti
con la quale si comunica all'identicatore che l'uscita è fortemente inuenzata dai
primi tre ingressi: IV rif , IF rif , IT rif . In questo caso, quindi, con l'identicazione
si andrà a stimare il mismatch esistente tra le correnti di riferimento e le correnti
eettivamente erogate dalle coils.
L'identicazione è realizzata utilizzando i segnali degli spari: 31937, 31938, 31939,
31958, 31957, 31907, i quali hanno valori di densità di plasma molto simili, intorno ai
0.70 [1020 m−3 ] e corrente di plasma preprogrammata pari a 500 kA.
In gura 2.7 si riporta la stima delle correnti relative allo sparo 31937, il quale è anche
utilizzato nel processo di identicazione del modello. La simulazione in questo caso
Figura 2.7: Confronto tra le correnti stimate e le correnti reali, sparo 31937
produce, per ogni corrente, una ricostruzione con valore di tting superiore al 90 %.
É interessante, inoltre, testare il modello su scariche non utilizzate durante il processo
di identicazione. Nelle gure 2.8, 2.9 si riportano i risultati delle simulazioni e anche
in questo caso si hanno valori di tting molto elevati. Stimare un modello dinamico
attraverso una metodologia di tipo grey-box produce alcuni vantaggi rispetto una
stima black-box:
33
Cap. 2
Identicazione
2.4
Identicazione grey-box e risultati ottenuti
Figura 2.8: Confronto tra le correnti stimate e le correnti reali, sparo 31851
Figura 2.9: Confronto tra le correnti stimate e le correnti reali, sparo 31944
• gli elementi delle matrici A, B, C, D stimati durante l'identicazione sono
riconducibili a parametri sici dell'impianto;
• la ricostruzione delle correnti ha un tting migliore.
34
Cap. 2
Identicazione
2.4
Identicazione grey-box e risultati ottenuti
Riguardo il secondo punto si mostra in gura 2.10 la stima delle correnti relative
allo sparo 31851, ottenuta simulando il modello dinamico identicato con metodologia black-box, per ogni corrente si ha un tting minore se confrontato con la stima
mostrata in gura 2.8
Figura 2.10: Confronto tra le correnti stimate e le correnti reali, sparo 31851
2.4.2 Identicazione coil H
Il modello che descrive la dinamica della coil H ha cinque ingressi:
• corrente misurata nella coil V: IV ;
• corrente misurata nella coil F: IF ;
• corrente misurata nella coil T: IT ;
• corrente di riferimento coil H: IHrif ;
• corrente di plasma: IP LA ;
e una sola uscita:
35
Cap. 2
Identicazione
2.4
Identicazione grey-box e risultati ottenuti
• corrente erogata dalla coil H: IH
La corrente erogata dall' avvolgimento H ha intensità molto minore rispetto l'intensità
delle correnti erogate dalle altre coils, in quanto preposta al controllo di posizione
verticale del plasma già stabile per costruzione; questa minore intensità fa si che il
problema di identicazione della coil H insieme alle altre coil sia numericamente mal
condizionato, quindi, la decisione di identicare tale coil separatamente.
In gura 2.11 si riportat la stima della corrente IH relativa allo sparo 31907 e come
è immediato constatare, rispetto all'identicazione precedente, si ha tting minore.
In ultimo si riporta l'identicazione eettuata sullo sparo 31941 non utilizzato nel
Figura 2.11: Identicazione coil H sparo n◦ 31907
processo di identicazione del modello.
2.4.3 Identicazione della corrente di plasma
L'ultimo modello identicato produce la stima della corrente di plasma IP LA ; in questo
caso si utilizza un modello del secondo ordine con quattro ingressi:
• corrente misurata nella coil V: IV ;
• corrente misurata nella coil F: IF ;
36
Cap. 2
Identicazione
2.4
Identicazione grey-box e risultati ottenuti
Figura 2.12: Identicazione coil H sparo n◦ 31941
• corrente misurata nella coil T: IT ;
• corrente misurata nella coil H IH ;
ed una sola uscita:
• la corrente di plasma, IP LA .
L'identicazione è, quindi, realizzata sul seguente sistema:
I
I = ˙P LA
IP LA
1 Ts
A=
∗ ∗
∗ ∗ ∗ ∗
B=
∗ ∗ ∗ ∗
C= 1 0
D= 0 0 0 0
37
Cap. 2
Identicazione
2.4
Identicazione grey-box e risultati ottenuti
Figura 2.13: Stima della corrente di plasma, sparo 31938
Il modello, come già in precedenza, è testato su uno sparo utilizzato nel processo
di identicazione, gura 2.13. Come si può notare nella fase di attop si hanno oscillazioni non corrette della corrente di plasma stimata: purtroppo sia lavorando sulla
forma del sistema grey-box, sia provando una metodologia black-box, non si è riusciti
ad eliminare tale errore ed ottenere un modello che ricostruisse bene la fase di attop
in cui la corrente di plasma è circa costante.
Per migliorare la stima si realizza, quindi, una seconda identicazione per la ricostruzione del mismatch tra la corrente reale e quella stimata; l'ingresso di questo
secondo sistema è rappresentato dalle correnti erogate dalle quattro coils più la corrente di plasma stimata, prodotta dal primo modello, mentre l'uscita è proprio il
segnale di correzione.
In gura 2.14 si riporta lo schema appena descritto.
L'identicazione del mismatch, realizzata in un primo momento su tutto l'intervallo temporale ∆T = [0 , 2] sec , non ha prodotto buoni risultati, si è scelto, quindi,
38
Cap. 2
Identicazione
2.4
Identicazione grey-box e risultati ottenuti
Figura 2.14: Schema a blocchi dell'identicazione della corrente di plasma
di restringere l'identicazione alla sola fase di attop, ottenendo in tal modo un netto miglioramento della stima. In gura 2.15 si riporta l'identicazione del mismatch
relativo allo sparo 31938. Applicando il segnale di correzione alla corrente di plasma
Figura 2.15: Mismatch IP LA − IˆP LA reale e stimato, sparo 31938
stimata si ottiene tting decisamente migliore come mostrato in gura 2.16. In ultimo
si riportano alcune simulazioni in cui sono confrontate la corrente di plasma stimata
con e senza correzione del mismatch. Dalle 2.17, 2.18 è chiaro che lo schema 2.14
39
Cap. 2
Identicazione
2.4
Identicazione grey-box e risultati ottenuti
Figura 2.16: Confronto tra la corrente di plasma stimata con e senza correzione del
mismatch, sparo 31938
produce risultati migliori rispetto la semplice identiczione grey-box iniziale.
Figura 2.17: Confronto tra la corrente di plasma stimata con e senza correzione del
mismatch, sparo 31937
2.4.4 Commenti sui risultati ottenuti
Con il metodo di identicazione proposto si è in grado di ricostruire le cinque correnti IV , IF , IT , IH , IP LA , partendo dalle quattro correnti di riferimento delle coils
IV,rif , IF,rif , IT,rif , IH,rif . Purtroppo tale risultato non è generale, infatti, testando
questi sistemi su scariche con condizioni operative dierenti da quelle su cui sono
40
Cap. 2
Identicazione
2.5
Metodologia PEM
Figura 2.18: Confronto tra la corrente di plasma stimata con e senza correzione del
mismatch, sparo 31909
identicati si ottengono stime peggiori. D'altronde tutti e tre modelli sono lineari
e in quanto tali non possono ricostruire in modo completo un sistema che di base è
non lineare e che può essere approssimato a lineare solo in un intorno di un punto di
equilibrio.
2.5 Metodologia PEM
Per la stima dei modelli presentati nel paragrafo precedente, si è scelto di utilizzare
l'algoritmo a minimizzazione dell'errore di predizione, implementato dal comando
M atlab P EM (Prediction Error Method).
Dato un modello M (θ) appartenente a una certa classe parametrica Γ ≡ {M (θ); θ ∈ Θ}
e data una sequenza di N misure dei segnali d'ingresso e d'uscita:
uN := {u(t); t = 1, .., N }
y N := {y(t); t = 1, .., N }
si procede nel modo seguente:
1. Per un qualche valore di θ ssato si costruisce il miglior (secondo qualche criterio) predittore all'istante t − 1 dell'uscita y(t). Questo predittore è una funzione
41
Cap. 2
Identicazione
2.5
Metodologia PEM
dei dati passati che viene denotata con il simbolo M̂ (θ):
M̂ (θ) : (y t−1 , ut−1 ) → ŷθ (t|t − 1)
La predizione ŷθ (t|t − 1) si può pensare come funzione dei dati passati e quindi
come una funzione aleatoria.
2. Si formano gli errori di predizione
θ (t) := y(t) − ŷθ (t) per t = 1, .., N.
Analogamente a quanto detto nel caso precedente del predittore anche gli errori
di predizione possono essere visti come quantità aleatorie.
3. Si minimizza rispetto a θ una cifra di merito che descrive quanto bene il modello
predice il dato successivo. Ad esempio si minimizza l'errore quadratico medio
di predizione :
VN (θ) =
1
N
PN
2
t=1 θ (t)
o più in generale una media degli errori quadratici di predizione pesati con una
cifra di merito non negativa β(N, t) > 0,
VN (θ) =
1
N
PN
t=1
β(N, t)θ (t)2
che per N piccoli dà peso minore agli errori di predizione compiuti nella fase
iniziale dell'algoritmo quando l'inuenza di condizioni iniziali stimate in modo
approssimativo è più deleteria. Per N grande β(N, t) > 0 tende a essere inutile
quindi deve tendere a uno.
In ogni caso si ricava la stima di θ dalla minimizzazione della cifra di merito:
42
Cap. 2
Identicazione
2.5
Metodologia PEM
θ̂N := Arg minθ VN (θ)
che è la stima PEM del parametro del modello. Lo stimatore θ̂N viene chiamato
stimatore PEM del parametro θ.
43
Capitolo 3
Modellazione del Plasma
Il controllo della posizione orizzontale del plasma in FTU è realizzato attraverso due attuatori: V che lavora in modalità feedforward
ed F che è invece parte integrante di un schema di controllo.
Il
problema che viene arontato in questo capitolo è quello di identicare un modello capace di ricostruire il valore del usso magnetico
orizzontale
∆Ψ
partendo dalla corrente di plasma e dalle correnti
erogate dalle quattro coils V, F, T, H; tale modello è necessario per
poter migliorare il sistema anti-windup costituente una parte dello
schema di controllo a ciclo chiuso della coil F già implementato in
FTU. In questo capitolo si descriverà l'intero sistema di controllo
e la tecnica anti-windup utilizzata per poi passare allo sviluppo dei
modelli identicati per la ricostruzione del segnale
∆Ψ.
3.1 Controllo di posizione orizzontale del plasma
Uno dei principali problemi da risolvere anché sia possibile realizzare la fusione
nucleare è il connamento e il mantenimento del plasma in una precisa regione dello
spazio. Nel Frascati Tokamak Upgrade la posizione verticale della colonna di plasma
risulta stabile per costruzione, mentre ciò non accade per la posizione orizzontale:
per questo sono presenti gli attuatori V (vertical) e F (feedback). Il primo fornisce
gran parte dell'energia necessaria per la stabilizzazione orizzontale ed è generalmente
pilotato in feedforward; il secondo, invece, è dedicato ad un accurata regolazione della
44
Cap. 3
Modellazione del Plasma
3.1
Controllo di posizione orizzontale del plasma
posizione orizzontale ed è pilotato attraverso un PID e un termine preprogrammato.
L'ingresso ∆Ψ di tale PID è dato dalla dierenza tra il usso magnetico misurato e i
due limiti del plasma desiderati. Questa misura è strettamente collegata alla posizione
del plasma in quanto una variazione della posizione orizzontale genera una dierenza
tra il valore del usso e i due limiti desiderati. Il sistema di controllo della coil F
attualmente implementato in FTU è dotato, oltre che di un semplice PID, anche
di un controllo anti-windup il quale evita i comportamenti oscillatori che possono
vericarsi quando l'attuatore entra in regime di funzionamento non lineare.
In gura 3.1 sono riportati i due schemi di controllo, con e senza anti-windup, per
la correzione della posizione orizzontale del plasma. Nel corso del capitolo verranno
Figura 3.1: In alto è rappresentato lo schema di controllo senza anti-windup, in basso
è rappresentato lo schema di controllo con anti-windup
45
Cap. 3
Modellazione del Plasma
3.1
Controllo di posizione orizzontale del plasma
analizzati in dettaglio tutti i blocchi appartenenti al sistema di controllo e saranno
chiarite le ragioni per cui si necessita di un compensatore anti-windup.
3.1.1 Blocco PID
Il blocco PID rappresenta un semplice compensatore proporzionale, integrale, derivativo descritto dalla seguente equazione:
Z
yP ID = Kp uP ID + Ki
uP ID + Kd u̇P ID
(3.1.1)
I termini Kp , Ki , Kd non sono costanti, ma hanno un andamento di tipo `trapezoidale'
nel tempo, sono cioè crescenti durante la fase iniziale dell'esperimento, quando il plasma si sta ancora formando, costanti durante la fase di attop e sono, invece, decrescenti durante la fase di nale. Per poter eseguire delle simulazioni in Simulink è stata
implementata la versione discretizzata del precedente PID con tempo di campionamento TS = 0.5 ms: la funzione di trasferimento del PID discretizzato corrisponde
a:
Ts z + 1
z−1
yP ID (z) = dm Kp + Ki
+ Kd
uP ID (z)
2 z−1
(τ + Ts )z − τ
(3.1.2)
con dm e τ costanti che dipendono dal tipo di sparo.
3.1.2 Attuatore F
Il blocco AL − F rappresenta l'intero attuatore F: esso è composto da un convertitore
a ponte e da un circuito di controllo. Il ponte è realizzato attraverso dei tiristori di
potenza il cui funzionamento è simile a quello di un diodo, ma a dierenza di quest'ultimo quando la corrente nel circuito scende al di sotto una certa soglia essi entrano
in interdizione e il loro comportamento è praticamente quello di un circuito aperto.
I tiristori utilizzati nell'AL − F hanno un valore di soglia pari a 1.2 kA al sotto il
quale non è possibile la conduzione: quando al convertitore sono richieste tali valori
46
Cap. 3
Modellazione del Plasma
3.1
Controllo di posizione orizzontale del plasma
di corrente il ponte entra in regime di funzionamento non lineare e la presenza PID,
progettato per lavorare con componenti lineari, innesca fenomeni di instabilità nell'intero sistema di controllo. Il sistema anti-windup, presente nello schema di controllo
di gura 3.1, riduce notevolmente questi fenomeni che a volte possono compromettere
l'esito della sparo.
Come si può notare dalla gura 3.2 il blocco AL-F viene schematizzato tramite tre
blocchi:
• PHSC PID;
• PHSC Logic;
• AL-F Bridges.
Figura 3.2: Schema a blocchi dell'attuatore F
Il blocco AL-F Bridges rappresenta il convertitore vero e proprio, mentre i primi
due blocchi, PHSC PID e PHSC Logic, rappresentano l'unità di controllo dell' AL-F
Bridges.
Dalle equazioni di maglia del convertitore, il cui schema elettrico semplicato è
mostrato in gura 3.3, è possibile ricavare le equazioni caratterizzanti il blocco AL-F
bridge:
V1 = L
dI1
d(I1 − I2 )
+ LF
+ RF (I1 − I2 ) + 8VT
dt
dt
(3.1.3a)
47
Cap. 3
Modellazione del Plasma
3.1
Controllo di posizione orizzontale del plasma
Figura 3.3: Schema elettrico semplicato del ponte a tiristori del convertitore AL-F
V2 = L
dI2
d(I1 − I2 )
− LF
− RF (I1 − I2 ) + 8VT
dt
dt
(3.1.3b)
in cui il termine 8VT indica la caduta di tensione del banco di tiristori presente su ogni
ramo del ponte. Dalle 3.1.3 è possibile ricavare le due seguenti equazioni dierenziali
accoppiate per il calcolo delle correnti I1 (t) e I2 (t).
dI1 (t)
=
dt
n
o
(
(L+LF )V1 (t)+LF V2 (t)+LRF (I2 (t)−I1 (t))−I1 (t)−8(2LF +L)VT
max 0,
, se I1 (t) ≤ 0
L2 +2LLF
altrimenti
(3.1.4a)
o
n
(
(L+LF )V2 (t)+LF V1 (t)+LRF (I1 (t)−I2 (t))−I2 (t)−8(2LF +L)VT
max 0,
, se I1 (t) ≤ 0
dI1 (t)
2 +2LL
F
= (L+LF )V (t)+L V (t)+LR (I (t)−I L(t))−I
2
2
2 (t)−8(2LF +L)VT
F 1
F 1
dt
,
altrimenti.
L2 +2LLF
(3.1.4b)
(L+LF )V1 (t)+LF V2 (t)+LRF (I2 (t)−I1 (t))−I1 (t)−8(2LF +L)VT
L2 +2LLF
,
L'unità di controllo del convertitore è, invece, realizzata dal blocco PHSC il quale ha
il compito di soddisfare due condizioni:
• la corrente IF (t) di uscita deve essere il più vicino possibile alla corrente IF,req (t)
proveniente dal PID del sistema di controllo;
• entrambe le correnti I1 (t) e I2 (t) non devono mai scendere al di sotto della
corrente di circolazione anche se IF,req (t) è minore di tale soglia.
48
Cap. 3
Modellazione del Plasma
3.1
Controllo di posizione orizzontale del plasma
Per raggiungere tali obiettivi sono presenti i due blocchi PHSC PID e PHSC Logic di
controllo del ponte descritti rispettivamente dalle seguenti equazioni:
Z
eI + Kd ėI
(3.1.5)
V1 (t) = σV̄ (Imin − 1.8I2 (t) + σM̄ (Ireg (t)))
(3.1.6)
V2 (t) = σV̄ (Imin − 1.8I1 (t) − σM̄ (Ireg (t)))
(3.1.7)
Ireg (t) = Kp eI (t) + KI
dove Imin = 1200 A, e σs (·) è una saturazione simmetrica scalare con livello di
saturazione s, M̄ = 12500 e V̄ = 5000.
3.1.3 Modello del plasma
Anché il sistema anti-windup possa funzionare correttamente è necessario disporre
di uno strumento in grado di ricostruire il valore della variazione di usso ∆Ψ a partire
dalla misura delle correnti presenti in FTU durante lo sparo: la corrente di plasma
IP LA e le correnti erogate dalle quattro coils IV , IF , IT , IH . Il modello attualmente
implementato in FTU è una semplice funzione di trasferimento del primo ordine data
da:
P (s) = −10−7
3.4375 s
0.008 s + 1
(3.1.8)
Il segnale in ingresso a tale blocco è una combinazione lineare della corrente erogata
dalla coils F, IF , della corrente preprogrammata della coil V, IV,pre e della corrente di
plasma preprogrammata, IP LA,pre .
Si ha quindi il seguente ingresso:
w1 (t) = IF + gP IP LA,pre + gV IV,pre
(3.1.9)
in cui gP e gV sono due costanti che permettono di pesare il contributo delle due
correnti che moltiplicano, in particolare si ha gP = 4.717 ∗ 10−2 e gV = 4.317.
49
Cap. 3
Modellazione del Plasma
3.1
Controllo di posizione orizzontale del plasma
3.1.4 Compensatore anti-windup
Noti i motivi per cui il sistema di controllo può presentare fenomeni di instabilità, uno
schema anti-windup può essere applicato per trattare i comportamenti non lineari di
AL-F come una sorta di ingresso non lineare indesiderato.
Lo schema anti-windup mostrato in gura 3.4 genera due segnali di compensazione
Figura 3.4: Schema di controllo con compensatore antiwindup
Figura 3.5: Schema a ciclo chiuso con target model
v1 (t) e v2 (t), dove v1 (t) è sommato all'ingresso dell'AL-F e v2 (t) è sommato all'uscita
∆Ψ del processo. Questi due segnali sono calcolati in modo tale che l'azione di
compensazione prodotta dall'anti-windup miri a riprodurre quanto più possibile la
risposta a ciclo chiuso prodotta quando la dinamica dell'AL-F è sostituita con il
cosiddetto target model (o modello di riferimento). Il compensatore anti-windup
proposto permette di ottenere i seguenti risultati:
50
Cap. 3
Modellazione del Plasma
3.1
Controllo di posizione orizzontale del plasma
Teorema 1 [1] Si assuma che la dinamica dell'attuatore F coincida con la dinamica
del modello AL-F per ogni t ≥ 0. Con riferimento alla gura 3.5 si assuma anche
che il target model sia tale che il suo ciclo chiuso, attraverso il PID e il modello di
PLASMA, sia esponenzialmente stabile. Allora:
• per valori di Kaw ≥ 0 abbastanza piccoli e sotto l'azione di segnali convergenti
lo schema di controllo 3.4 genera risposte convergenti;
• per ogni traiettoria del sistema a ciclo chiuso con modello di riferimento tale
che la risposta del target model coincide con quella del modello non lineare di
AL-F, la risposta ∆Ψ dello schema di controllo, con anti-windup dalle stesse
condizioni iniziali e con lo stesso ingresso, converge alla risposta ∆Ψ del ciclo
chiuso con modello di riferimento.
Per la dimostrazione di tale teorema si rimanda a [1].
L'azione correttiva prodotta dall'anti-windup ha lo scopo di nascondere al compensatore PID il comportamento non lineare dell'attuatore F: il segnale v2 (t), sommato al
∆Ψ, indica quanto la risposta dell'impianto reale dierisce da quella che si avrebbe se
non fossero presenti componenti non lineari. Tale dierenza, opportunamente pesata
attraverso la costante Kaw , è sommata anche in ingresso all'impianto reale attraverso
il segnale v1 (t). Questo schema di controllo, inoltre, ha il pregio di disattivare in
modo automatico il contributo del compensatore anti-windup quando l'intero sistema
è in regime di funzionamento lineare: se la risposta dell'AL-F, infatti, coincide con la
risposta del target model si avrà che entrambi i segnali di compensazione v1 (t) e v2 (t)
sono pari a zero a meno di eventuali transitori indotti dai modelli target e AL-F.
51
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
3.2 Identicazione del modello di plasma
Uno dei principali problemi dello schema di controllo analizzato nel capitolo precedente è l'incapacità del modello di Plasma di ricostruisce in modo adeguato il segnale
∆Ψ: l'obiettivo principale di questo lavoro è, quindi, quello di trovare uno strumento
matematico in grado di ricostruire correttamente la variazione del usso magnetico
∆Ψ necessario al controllo della posizione orizzontale del plasma.
3.2.1 Identicazione del modello di plasma attraverso un modello dinamico discreto
Una delle soluzioni adottate per ricostruire la variazione del usso magnetico ∆Ψ
consiste nella stima di un sistema dinamico lineare a tempo discreto, con tempo di
campionamento Ts = 0.5 ms descritto dalle seguenti equazioni:
x(k Ts + Ts ) = A x(k Ts ) + B u(k Ts )
(3.2.1)
y(k Ts ) = C x(k Ts )
(3.2.2)
Il modello ha cinque ingressi:
• la corrente misurata nella coil V, IV ;
• la corrente misurata nella coil F, IF ;
• la corrente misurata nella coil T, IT ;
• la corrente misurata nella coil H, IH ;
• la corrente di plasma IP LA ;
ed una sola uscita:
• il segnale ∆Ψ
52
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
Il sistema identicato, essendo un modello lineare, non potrà riprodurre correttamente
il segnale ∆Ψ per la durata dell'intero sparo, ma avrà validità locale nell'intorno di un
certo punto di equilibrio; ragion per cui l'identicazione è fatta utilizzando solo parte
dei segnali scaricati dal database di FTU: in particolare dall'intero segnale ,che ha
durata temporale di circa 6 s (tin = −3 s : tf in = 3 s), viene estrapolata l'informazione
tra (0.3 s : 1.2 s) intervallo in cui l'esperimento è in fase di attop.
Per testare la fattibilità del metodo è stato inizialmente identicato un modello su di
una singola scarica.
Il primo sparo su cui è stato identicato il modello è il numero 31626 il quale ha le
seguenti caratteristiche:
• anti-windup attivo da inizio scarica;
• raggio esterno 1.225 m, raggio interno 0.645 m;
• densità di plasma di riferimento 0.56 ∗ 1020 m−3 ;
• densità di plasma reale 0.70 ∗ 1020 m−3 ;
• corrente di plasma preprogrammata −500 kA.
In gura 3.6 si riportano i risultati dell'identicazione: come si può notare si ha una
buona ricostruzione del plasma a partire dai 0.2 s no a 1.2 s sia nelle grandi che nelle
piccole oscillazioni; al di fuori di questo intervallo temporale, quando non si è in fase
di attop il modello non ricostruisce il segnale ∆Ψ in quanto le condizioni operative
del sistema sono totalmente dierenti da quelle su cui è stato identicato il modello.
É da osservare, inoltre, che il ∆Ψ stimato, rappresentato in gura 3.6, è il risultato di
una simulazione eseguita con x(0) = 0 che, ovviamente, non corrisponde alla realtà
della scarica, per cui l'errore di stima convergerà a zero solo dopo una certa costante di
53
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
tempo a seguito della quale si esaurisce la dinamica transitoria del sistema. Dopo gli
1.5 s, invece, l'esperimento è in fase nale e si ha nuovamente una scarsa ricostruzione
del usso magnetico, in particolare in questo sparo si ha la disruzione del plasma a
1.6 s.
Per stimare questi modelli si ricorre ai metodi di identicazione a sottospazi i quali,
Figura 3.6: Ricostruzione del segnale ∆Ψ sparo 31626
data la loro ecienza computazionale, sono particolarmente adatti per la stima di
sistemi MISO di grandi dimensioni. Essi vengono implementati utilizzando strumenti
derivanti dall'algebra lineare (per eettuare opportune proiezioni ortogonali e oblique)
come la decomposizione QR e SVD di cui esistono implementazioni molto ecienti.
Si noti che in questo modo si evita l'utilizzo di minimizzazioni ricorsive e si evitano,
quindi, i problemi di convergenza che esse comportano. L'identicazione è realizzata attraverso il comando matlab n4sid, il quale restituisce le matrici A, B, C, K
54
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
caratterizzanti il modello:
x(k Ts + Ts ) = A x(k Ts ) + B u(k Ts ) + K e(k Ts )
(3.2.3)
y(k Ts ) = C x(k Ts ) + e(k Ts )
(3.2.4)
in cui la matrice K descrive come il rumore bianco e(k Ts ) inuenzi la dinamica del
sistema. I risultati mostrati in gura 3.6 sono ottenuti simulando il sistema 3.2.4 con
e(k Ts ) = 0.
Avere un metodo di identicazione che consenta di separare il contributo degli ingressi
reali dal contributo di un rumore esterno indesiderato, permette di ottenere un risultato decisamente migliore rispetto a quando si realizza una identicazione che non tiene
conto del rumore e che cerca di riprodurre esattamente i dati sperimentali. Provando,
infatti, ad identicare un modello con la matrice K = 0n×1 si ottengono i risultati
mostrati in gura 3.7 e come si può vedere il ∆Ψ stimato presenta un contributo ad
alta frequenza assente nel caso precedente.
Dopo aver identicato il modello di PLASMA è possibile simulare l'intero sistema
Figura 3.7: Ricostruzione del segnale ∆Ψ con matrice K=0
55
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
di controllo a ciclo chiuso. Il primo schema di controllo simulato è privo del compensatore anti-windup: se la corrente erogata dalla coil F dovesse scendere sotto gli
1.2 kA dovrebbero allora vericarsi comportamenti di instabilità dovuti alla dinamica
non lineare dei tiristori. Lo schema di controllo simulato viene riportato in gura 3.8.
Oltre ai tre blocchi descritti nel paragrafo precedente, nello schema è riportato un
Figura 3.8: Schema di controllo a ciclo chiuso senza anti-windup
blocco a monte del PID e una costante additiva a monte del modello dell'attuatore F.
Il primo blocco non è altro che uno switch che permette di chiudere l'anello di controllo
ad un istante temporale t 6= 0 per evitare che il ∆Ψ, ricostruito in modo errato prima
della fase di attop, possa compromettere il risultato della simulazione; la costante
additiva, invece, serve per risolvere il seguente problema: la corrente di riferimento
IF,rif richiesta all'attuatore e la corrente IF eettivamente erogata dieriscono, oltre
che per la dinamica introdotta dall'attuatore, anche per un oset più o meno costante.
Osservando il primo graco della gura 3.9 si può notare come la corrente erogata
dalla coil F parta da un valore diverso da zero; questo oset, purtroppo, deve essere
eliminato manualmente essendo esso semplicemente un errore nella memorizzazione
dei dati nel database di FTU. La gura 3.10 mostra i risultati della simulazione del
sistema di controllo a ciclo chiuso senza anti-windup: si riporta in blu la corrente IF
56
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
Figura 3.9: Corrente di riferimento ed erogata dalla coil F, sparo 31626
Figura 3.10: Simulazione dello schema di controllo a catena chiusa senza anti-windup,
sparo : 31626
simulata e quando questa si trova sotto i 1200 A il sistema entra in oscillazione; in
rosso , invece, si riporta la corrente realmente erogata dalla coil F la quale non pre-
57
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
senta oscillazioni: come detto all'inizio del paragrafo, infatti, nella scarica in esame
il sistema anti-windup è attivo e giustamente il sistema di controllo non entra mai in
oscillazione.
Prima di poter validare il modello di plasma stimato è necessario vericare anche il
corretto funzionamento quando esso è inserito nello schema di controllo con compensatore anti-windup attivo, il quale è riportato in gura 3.11. Come viene confermato
dai graci 3.12 la corrente IF simulata non entra mai in oscillazione, anzi il suo andamento è molto prossimo a quello della IF erogata durante la scarica. Anche in questa
simulazione lo schema di controllo viene eettivamente chiuso a 0.4 s per evitare che
le dinamiche transitorie del modello di PLASMA possano compromettere la simulazione. Dopo gli 1.5 s la IF simulata si discosta notevolmente dalla IF reale, ma ciò
è accettabile in quanto l'esperimento è in fase nale e le condizioni operative sono
totalmente diverse da quelle che si hanno in regime di attop e nelle quali si è identicato il sistema dinamico del PLASMA.
Figura 3.11: Schema di controllo a ciclo con compensatore anti.windup
58
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
Figura 3.12: Simulazione dello schema di controllo a catena chiusa con anti-windup,
sparo : 31626
I risultati appena descritti sono ottenuti con un modello di plasma identicato su
un singolo sparo ed ovviamente questo non potrà avere validità generale e non potrà
essere utilizzato su tutte le scariche eseguite; gli spari lanciati su FTU, infatti, hanno
condizioni operative diverse dato che:
• la corrente di plasma in fase di attop può avere valori di ±350 kA o ±500, kA;
• la densità di plasma richiesta può variare da 0.5 ∗ 1020 m−3 a 1.5 ∗ 1020 m−3 ;
• può essere o meno attivo il sistema di allocazione delle coils V ed F per il
controllo dei runaway.
Si fa presente, inoltre, che esistono numerosi parametri che possono essere settati
diversamente da sparo a sparo.
Procedendo per gradi è, quindi, opportuno provare ad identicare un modello di
59
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
plasma su più spari che possano denirsi simili tra loro.
Le scariche utilizzate per le nuove identicazioni sono le seguenti:
• gruppo A: 31906, 31907, 31908, 31909. IP LA,pre = 500 kA, densità di plasma di
preprogrammata ≈ 0.65 ∗ 1020 m−3 ;
• gruppo B: 31623, 31626, 31628, 31629. IP LA,pre = −500 kA, densità di plasma
di preprogrammata ≈ 0.56 ∗ 1020 m−3 ;
• gruppo C: 32771, 32773, 32774, 31775. IP LA,pre = 500 kA, densità di plasma di
preprogrammata ≈ 0.75 ∗ 1020 m−3 .
Per ognuno di questi tre gruppi è stato identicato e validato un modello dinamico
che potesse ricostruire correttamente il ∆Ψ.
3.2.2 Simulazione dei modelli identicati
Il primo set di spari, gruppo A, è caratterizzato da valori di corrente IF in modulo maggiore di 1200 A nella fase di attop. Il sistema non entra mai in oscillazione
essendo esso fuori dal regime di funzionamento non lineare, per cui la corrente IF
ottenuta simulando il sistema di controllo senza anti-windup dovrebbe essere il più
possibile coincidente con quella ottenuta simulando il sistema con compensatore antiwindup attivo. Nelle gure 3.13, 3.14, sono riportati i risultati delle due simulazioni
e nella gura 3.15 sono confrontate le correnti e i valori di ∆Ψ ricostruiti con e senza
anti-windup. Come è possibile osservare dai graci si ha una buona ricostruzione della
corrente IF e della variazione di usso ∆Ψ; le due simulazioni producono, come aspettato, risultati simili in quanto per questo tipo di sparo il contributo del compensatore
anti-windup è praticamente nullo.
I risultati mostrati nelle 3.13, 3.14, 3.15 sono ottenuti simulando la scarica 31906,
60
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
Figura 3.13: Simulazione del sistema di controllo a ciclo chiuso senza anti-windup,
sparo 31906
Figura 3.14: Simulazione del sistema di controllo a ciclo chiuso con compensatore
anti-windup attivo, sparo 31906
61
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
Figura 3.15: Confronto dei risultati ottenuti nelle due simulazioni, sparo 31906
la quale è stata utilizzata anche per l'identicazione del modello di plasma. É interessante ora simulare il sistema con una scarica non utilizzata per il calcolo del modello
di plasma.
Nelle 3.16, 3.17 sono riportati i risultati ottenuti dalla simulazione della scarica 31925.
A dierenza del caso precedente, la corrente IF simulata riproduce correttamente
Figura 3.16: Simulazione del sistema di controllo a ciclo chiuso senza anti-windup,
sparo 31925
62
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
Figura 3.17: Simulazione del sistema di controllo a ciclo chiuso con compensatore
anti-windup attivo, sparo 31925
la IF reale solo no a 1.2 s: questo fa capire come il sistema di plasma stimato non
abbia validità generale e ciò è dovuto al fatto che le quattro scariche appartenenti al
gruppo A sono simili tra loro e il modello identicato non è in grado di riprodurre un
insieme di dinamiche più ampio.
I risultati mostrati nel paragrafo precedente relativi allo sparo 31626, appartenente al
gruppo B, sono identici a quelli che si possono ottenere simulando lo stesso sparo, ma
con il modello di plasma identicato sul gruppo B e non sulla singola scarica. Anche
per questo modello viene simulato il sistema su una scarica non utilizzata durante il
processo di identicazione.
In gura 3.18 sono riportati i risultati della simulazione dello sparo 31939: anche in
questo caso la precisione con cui viene ricostruita la corrente IF è minore rispetto
alla precisione che si ha simulando scariche su cui è identicato il modello di plasma
63
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
ma, nonostante questo, i risultati prodotti sono comunque ritenuti soddisfacenti, in
quanto l'andamento della IF è ricostruito e nel sistema di controllo con anti-windup
non sono presenti le oscillazioni quando si è in regime non lineare.
In ultimo si riportano le simulazioni del gruppo C: le correnti IF misurate durante
Figura 3.18: Simulazione del sistema di controllo a ciclo chiuso con compensatore
anti-windup attivo, sparo 31939
questi spari hanno la caratteristica di avere una intensità in modulo minore di 1200 A,
ma il loro andamento è, comunque , privo di oscillazioni essendo il compensatore antiwindup attivo durante la scarica. Dalle 3.19, 3.20 è evidente come il modello di plasma
funzioni correttamente riproducendo la IF reale quando l'anti-windup è attivo, mentre
senza anti-windup l'intero sistema di controllo entra in oscillazione.
64
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
Figura 3.19: Simulazione del sistema di controllo a ciclo chiuso senza anti-windup,
sparo 32771
Figura 3.20: Simulazione del sistema di controllo a ciclo chiuso con compensatore
anti-windup attivo, sparo 32771
65
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
3.2.3 Identicazione del modello di plasma attraverso mappa
statica
Il valore della variazione di usso magnetico ∆Ψ può essere ricostruito, oltre che
con un modello dinamico, anche con una combinazione lineare delle correnti erogate
durante lo sparo e delle loro derivate. É noto, infatti, che quando l'intero impianto
è in equilibrio: si è in regime di attop con IP LA costante, la colonna di plasma
è posizionata correttamente e il usso magnetico ∆Ψ è zero allora vale la seguente
relazione:
β IV + IF = α0 IP LA + α1
(3.2.5)
con α0 e α1 costanti.
Quando la posizione della colonna di plasma non corrisponde a quella desiderata si
ha che la variazione del usso magnetico orizzontale ∆Ψ è diversa da zero e la 3.2.5
non è più valida. Si può quindi scrivere:
β IV + IF − α0 IP LA − α1 6= 0
(3.2.6)
Questa considerazione suggerisce che il ∆Ψ possa essere funzione delle correnti IV , IF , IP LA
e delle loro derivate I˙V , I˙F , I˙P LA , in particolare si suppone che esso sia una combinazione lineare di queste correnti e delle rispettive derivate più un termine costante:
∆Ψ = θ1 IV + θ2 IF + θ3 IP LA + θ4 I˙V + θ5 I˙F + θ6 I˙P LA + θ7
(3.2.7)
In generale le correnti IV e IP LA nella fase di attop hanno un andamento più o meno
costante e la loro derivata è circa nulla, quindi, il maggior contributo nella stima del
∆Ψ proviene necessariamente dalla corrente IF e dalla sua derivata I˙F .
Per vericare la correttezza di quanto ipotizzato, viene confrontato il segnale ∆Ψ con
le singole correnti IV , IF , IP LA e con le rispettive derivate: da tale confronto emerge
66
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
che il ∆Ψ è fortemente inuenzato da −αI˙F , come mostra la gura 3.21, confermando
quanto detto in precedenza. Tale risultato non ha, ovviamente, validità generale in
quanto il confronto è eettuato ltrando e normalizzando opportunamente il segnale
−I˙F per ogni sparo.
Tornando al processo di identicazione vero e proprio è chiaro, dalla 3.2.7, che la
Figura 3.21: Confronto tra ∆Ψ e −I˙F per per gli spari 31626, 31628, 32775
stima del ∆Ψ coincide con l'identicazione delle sette costanti θi , i = 1, .., 7. Il problema può essere risolto applicando il metodo dei minimi quadrati, ovvero una tecnica
di ottimizzazione che permetta di trovare una funzione, detta curva di regressione,
67
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
che si avvicini il più possibile ad un insieme di dati noto.
Dai segnali scaricati dal database di FTU è possibile creare un vettore dei dati in
uscita, [∆Ψ], di dimensione N e una matrice dei dati di ingresso, [I], di dimensione
N × 7, in cui N è il numero di campioni su cui si eettua l'identicazione. Campio-
nando, quindi, i dati relativi all'intervallo temporale 0.3 s : 1.2 s è possibile scrivere
l'equazione matriciale:
[I] [θ] = [∆Ψ]
(3.2.8)
Calcolando la pseudoinversa sinistra di [I] si può esprimere il vettore dei parametri θ
come:
−1
[θ] = [I] [I]
[I]T [∆Ψ]
T
(3.2.9)
Testando la 3.2.7 su un singolo sparo si nota come il ∆Ψ venga ricostruito correttamente.
In gura 3.22 si riportano i risultati del processo di identicazione applicato alle
scariche 31626, 32771.
Dopo aver vericato che il metodo di stima della mappa statica produce buoni risultati a catena aperta, anche se applicato ad un set di spari, si passa alla simulazione
del sistema di controllo a ciclo chiuso con e senza compensatore anti-windup: i gruppi
di scariche utilizzati sono gli stessi del paragrafo precedente.
In gura 3.23 si riportano i risultati della simulazione per uno sparo appartenente al
gruppo A: come nel caso precedente i due schemi con e senza anti-windup producono
risultati coincidenti, essendo la scarica fuori dal regime non lineare.
Il sistema è, nuovamente, testato anche su uno sparo non utilizzato per la stima
della mappa statica, gura 3.24: anche se con compensatore anti-windup attivo la IF
stimata ha un leggero errore rispetto la IF reale, le oscillazioni presenti, invece, senza
anti-windup sono ltrate confermando la correttezza della simulazione.
68
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
Figura 3.22: Ricostruzione del segnale ∆Ψ attraverso la mappa statica, spari 31626,
32771
Per il gruppo B, si riporta sempre la simulazione dello sparo 31626, gure 3.25,
3.26, in quanto ricco di informazioni, dato che la corrente IF passa da valori per cui
il sistema è in regime non lineare a valori per cui l'impianto è in condizioni operative
normali.
In gura 3.27 si riporta la simulazione di una scarica fuori dal regime di
funzionamento non lineare.
In ultimo sono testate le scariche del gruppo C: in 3.28, 3.29 si mostrano i risultati
delle simulazioni realizzate con uno sparo oscillante 32771 e uno sparo al limite della
regione di instabilità 32776.
69
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
Figura 3.23: Simulazione del sistema di controllo senza e con antiwindup, sparo 31909
70
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
Figura 3.24: Simulazione del sistema di controllo senza e con antiwindup, sparo 31933
71
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
Figura 3.25: Simulazione del sistema di controllo a ciclo chiuso senza antiwindup,
sparo 31626
Figura 3.26: Simulazione del sistema di controllo a ciclo chiuso con anti-windup, sparo
31626
72
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
Figura 3.27: Simulazione del sistema di controllo a ciclo chiuso senza e con antiwindup, sparo 31629
Figura 3.28: Simulazione del sistema di controllo a ciclo chiuso senza e con antiwindup, sparo 32771
73
Cap. 3
Modellazione del Plasma
3.2
Identicazione del modello di plasma
Figura 3.29: Simulazione del sistema di controllo a ciclo chiuso senza e con antiwindup, sparo 32776
74
Capitolo 4
Conclusioni e sviluppi futuri
In questa tesi è stato principalmente svolto un lavoro di identicazione di alcune
dinamiche della macchina FTU (Frascati Tokamak Upgrade). Nella prima parte,
capitolo 2, sono stati stimati dei modelli dinamici in grado di ricostruire le correnti
erogate dalle coils V, F, T, H e la corrente di plasma, partendo dalle quattro correnti di riferimento in ingresso alle coils. Utilizzando le informazioni relative alla sica
dell'impianto, e quindi le equazioni circuitali delle coil, è stato costruito un modello lineare parametrico a tempo discreto necessario per una identicazione di tipo
grey-box. Si è cercato, inizialmente, di identicare un unico modello in grado di raggiungere l'obiettivo pressato: tale soluzione, purtroppo, non si è rivelata funzionale
ed è stato, quindi, necessario scindere il problema generale in problemi più semplici.
Per queste ragioni sono stati identicati tre dierenti modelli in grado di ricostruire
separatamente la corrente di plasma, le correnti erogate dalle coils V, F, T e la corrente erogata dalla coil H: questo secondo approccio ha prodotto, rispetto al primo,
buoni risultati.
Nella seconda parte del lavoro, capitolo 3, si è cercato di stimare un modello lineare
che potesse ricostruire la variazione del usso magnetico orizzontale ∆Ψ partendo
dalle correnti erogate dalle coils e dalla corrente di plasma. Il usso magnetico è
75
Cap. 4
Conclusioni e sviluppi futuri
utilizzato come segnale di feedback nel sistema di controllo di posizione orizzontale
del Tokamak, realizzato mediante un PID e da un compensatore anti-windup. Per
risolvere tale problema sono stati utilizzati due approcci dierenti: nel primo caso è
stata eettuata una identicazione blackbox di un modello dinamico lineare a tempo
discreto; in seconda battuta è stata, invece, stimata una mappa statica lineare attraverso il metodo dei minimi quadrati.
Dalle simulazioni è emerso che il modello dinamico inserito nel sistema di controllo a
ciclo chiuso produce risultati migliori rispetto alla mappa statica. I modelli presentati
nei capitoli 2 e 3 della tesi sono stati tutti identicati su un set ristretto di spari.
Le condizioni operative della macchina Tokamak non sono sempre le stesse, prima di
eseguire ogni scarica vengono, infatti, settati dal team di controllo numerosi parametri
che variano da sparo a sparo. Questa arbitrarietà nella congurazione della scarica,
oltre agli ovvi pregi, ha però lo svantaggio di portare il sistema in punti di lavoro
ogni volta dierenti: tutti i modelli identicati sono lineari e proprio per questo non
potranno mai descrivere in modo generale e per ogni congurazione ammissibile la
dinamica dell'intero sistema.
Uno dei possibili sviluppi futuri è quello di rendere i modelli identicati più generali: tale obiettivo prevede l'individuazione di tutte le possibili parametrizzazioni della
macchina FTU che possano portare il sistema in condizioni operative non costanti. Trovando i fattori maggiormente inuenti, sarebbe possibile attivare, in base alle
congurazioni scelte dal team di controllo, uno degli N modelli identicati.
76
Appendice A
Listato
Software per l'identicazione della corrente di plasma, IP LA
1 clear a l l ;
2 clc ;
3
4 %% Caricamento segnali
5
6 stop_time=2;
7 Ts=0.005;
8 shot1=load ( ' 31908.mat ' ) ;
9 shot2=load ( ' 31938.mat ' ) ;
10 shot3=load ( ' 31939.mat ' ) ;
11 shot4=load ( ' 31906.mat ' ) ;
12 shot5=load ( ' 31907.mat ' ) ;
13 shot6=load ( ' 31937.mat ' ) ;
14 f i g =1;
15
16 %% Separazione dei segnali
17
18 [ I1 , Ir if1 , t1]= CostruzioneSegnali3 ( shot1 , Ts) ;
19 [ I2 , Ir if2 , t2]= CostruzioneSegnali3 ( shot2 , Ts) ;
20 [ I3 , Ir if3 , t3]= CostruzioneSegnali3 ( shot3 , Ts) ;
21 [ I4 , Ir if4 , t4]= CostruzioneSegnali3 ( shot4 , Ts) ;
22 [ I5 , Ir if5 , t5]= CostruzioneSegnali3 ( shot5 , Ts) ;
23 [ I6 , Ir if6 , t6]= CostruzioneSegnali3 ( shot6 , Ts) ;
24 [ IF11 , I_rifF11 , IFT1 , I_rifFT1 , IF21 , I_rifF21 , tF1 , tFT1 , tF2]=
SeparazioneSegnali2 ( I1 , Irif 1 , t1 , Ts) ;
25 [ IF12 , I_rifF12 , IFT2 , I_rifFT2 , IF22 , I_rifF22 , tF1 , tFT2 , tF2]=
SeparazioneSegnali2 ( I2 , Irif 2 , t2 , Ts) ;
26 [ IF13 , I_rifF13 , IFT3 , I_rifFT3 , IF23 , I_rifF23 , tF1 , tFT1 , tF2]=
SeparazioneSegnali2 ( I3 , Irif 3 , t3 , Ts) ;
27 [ IF14 , I_rifF14 , IFT4 , I_rifFT4 , IF24 , I_rifF24 , tF1 , tFT1 , tF2]=
SeparazioneSegnali2 ( I4 , Irif 4 , t4 , Ts) ;
28 [ IF15 , I_rifF15 , IFT5 , I_rifFT5 , IF25 , I_rifF25 , tF1 , tFT1 , tF2]=
SeparazioneSegnali2 ( I5 , Irif 5 , t5 , Ts) ;
29 [ IF16 , I_rifF16 , IFT6 , I_rifFT6 , IF26 , I_rifF26 , tF1 , tFT1 , tF2]=
SeparazioneSegnali2 ( I6 , Irif 6 , t6 , Ts) ;
77
Cap. 4
Conclusioni e sviluppi futuri
30
31 %%
32
33 uF11=[IF11 (1 ,: ) ; IF11 ( 2 , :) ; IF11 ( 3 , : ) ; IF11 ( 4 ,: ) ] ;
34 yF11=IF11 ( 5 , :) ;
35 uF12=[IF12 (1 ,: ) ; IF12 ( 2 , :) ; IF12 ( 3 , : ) ; IF12 ( 4 ,: ) ] ;
36 yF12=IF12 ( 5 , :) ;
37 uF13=[IF13 (1 ,: ) ; IF13 ( 2 , :) ; IF13 ( 3 , : ) ; IF13 ( 4 ,: ) ] ;
38 yF13=IF13 ( 5 , :) ;
39 uF14=[IF14 (1 ,: ) ; IF14 ( 2 , :) ; IF14 ( 3 , : ) ; IF14 ( 4 ,: ) ] ;
40 yF14=IF14 ( 5 , :) ;
41 uF15=[IF15 (1 ,: ) ; IF15 ( 2 , :) ; IF15 ( 3 , : ) ; IF15 ( 4 ,: ) ] ;
42 yF15=IF15 ( 5 , :) ;
43 uF16=[IF16 (1 ,: ) ; IF16 ( 2 , :) ; IF16 ( 3 , : ) ; IF16 ( 4 ,: ) ] ;
44 yF16=IF16 ( 5 , :) ;
45
46 uFT1=[IFT1 ( 1 , :) ; IFT1 (2 ,: ) ; IFT1 ( 3 ,: ) ; IFT1 ( 4 , :) ] ;
47 yFT1=IFT1 ( 5 , :) ;
48 uFT2=[IFT2 ( 1 , :) ; IFT2 (2 ,: ) ; IFT2 ( 3 ,: ) ; IFT2 ( 4 , :) ] ;
49 yFT2=IFT2 ( 5 , :) ;
50 uFT3=[IFT3 ( 1 , :) ; IFT3 (2 ,: ) ; IFT3 ( 3 ,: ) ; IFT3 ( 4 , :) ] ;
51 yFT3=IFT3 ( 5 , :) ;
52 uFT4=[IFT4 ( 1 , :) ; IFT4 (2 ,: ) ; IFT4 ( 3 ,: ) ; IFT4 ( 4 , :) ] ;
53 yFT4=IFT4 ( 5 , :) ;
54 uFT5=[IFT5 ( 1 , :) ; IFT5 (2 ,: ) ; IFT5 ( 3 ,: ) ; IFT5 ( 4 , :) ] ;
55 yFT5=IFT5 ( 5 , :) ;
56 uFT6=[IFT6 ( 1 , :) ; IFT6 (2 ,: ) ; IFT6 ( 3 ,: ) ; IFT6 ( 4 , :) ] ;
57 yFT6=IFT6 ( 5 , :) ;
58
59 uF21=[IF21 (1 ,: ) ; IF21 ( 2 , :) ; IF21 ( 3 , : ) ; IF21 ( 4 ,: ) ] ;
60 yF21=IF21 ( 5 , :) ;
61 uF22=[IF22 (1 ,: ) ; IF22 ( 2 , :) ; IF22 ( 3 , : ) ; IF22 ( 4 ,: ) ] ;
62 yF22=IF22 ( 5 , :) ;
63 uF23=[IF23 (1 ,: ) ; IF23 ( 2 , :) ; IF23 ( 3 , : ) ; IF23 ( 4 ,: ) ] ;
64 yF23=IF23 ( 5 , :) ;
65 uF24=[IF24 (1 ,: ) ; IF24 ( 2 , :) ; IF24 ( 3 , : ) ; IF24 ( 4 ,: ) ] ;
66 yF24=IFT4 ( 5 , :) ;
67 uF25=[IF25 (1 ,: ) ; IF25 ( 2 , :) ; IF25 ( 3 , : ) ; IF25 ( 4 ,: ) ] ;
68 yF25=IFT5 ( 5 , :) ;
69 uF26=[IF26 (1 ,: ) ; IF26 ( 2 , :) ; IF26 ( 3 , : ) ; IF26 ( 4 ,: ) ] ;
70 yF26=IF26 ( 5 , :) ;
71
72 u1=[I1 ( 1 , :) ; I1 ( 2 , :) ; I1 ( 3 , : ) ; I1 (4 ,: ) ] ;
73 y1=I1 (5 ,: ) ;
74 u2=[I2 ( 1 , :) ; I2 ( 2 , :) ; I2 ( 3 , : ) ; I2 (4 ,: ) ] ;
75 y2=I2 (5 ,: ) ;
76 u3=[I3 ( 1 , :) ; I3 ( 2 , :) ; I3 ( 3 , : ) ; I3 (4 ,: ) ] ;
77 y3=I3 (5 ,: ) ;
78 u4=[I4 ( 1 , :) ; I4 ( 2 , :) ; I4 ( 3 , : ) ; I4 (4 ,: ) ] ;
79 y4=I4 (5 ,: ) ;
80 u5=[I5 ( 1 , :) ; I5 ( 2 , :) ; I5 ( 3 , : ) ; I5 (4 ,: ) ] ;
78
Cap. 4
Conclusioni e sviluppi futuri
81 y5=I5 (5 ,: ) ;
82 u6=[I6 ( 1 , :) ; I6 ( 2 , :) ; I6 ( 3 , : ) ; I6 (4 ,: ) ] ;
83 y6=I6 (5 ,: ) ;
84 tsim=t1 ;
85
86 %% Id e nt if i ca zi o ne del modello
87
88 data=merge ( iddata (y1 ' ,u1 ' ,Ts , 'Domain ' , 'Time ' ) , iddata (y2 ' ,u2 ' ,Ts , 'Domain '
, 'Time ' ) . . .
89
, iddata (y3 ' ,u3 ' ,Ts , 'Domain ' , 'Time ' ) , iddata (y4 ' ,u4 ' ,Ts , 'Domain
' , 'Time ' ) . . .
90
, iddata (y5 ' ,u5 ' ,Ts , 'Domain ' , 'Time ' ) , iddata (y6 ' ,u6 ' ,Ts , 'Domain
' , 'Time ' ) ) ;
91 par=zeros (10 ,1) ;
92
93 mi=idgrey ( 'mymodelD_Ipla2 ' , par , 'd ' ,Ts) ;
94 m=pem( data , mi , ' Criterion ' , 'Det ' , ' Focus ' , ' Stability ' , ' MaxIter ' ,1000 , '
Tolerance ' ,1e −10) ;
95 %m=n4sid ( data ,2 , ' Criterion ' , 'Det ' , ' Focus ' , ' Stability ' , ' MaxIter ' ,1000 , '
Tolerance ' ,1e −10) ;
96
97 %%
98
99 figure ( f i g )
100 f i g=f i g +1;
101 compare ( data ,m)
102 [ yh , fit , x0]=Compare( data ,m) ;
103 x0=cell2mat (x0) ;
104 ys1=(lsim ( ss (m.A,m.B,m.C,m.D, Ts) ,u1 ' , tsim , x0 (: , 1 ) ) ) ' ;
105 ys2=(lsim ( ss (m.A,m.B,m.C,m.D, Ts) ,u2 ' , tsim , x0 (: , 2 ) ) ) ' ;
106 ys3=(lsim ( ss (m.A,m.B,m.C,m.D, Ts) ,u3 ' , tsim , x0 (: , 3 ) ) ) ' ;
107 ys4=(lsim ( ss (m.A,m.B,m.C,m.D, Ts) ,u4 ' , tsim , x0 (: , 4 ) ) ) ' ;
108 ys5=(lsim ( ss (m.A,m.B,m.C,m.D, Ts) ,u5 ' , tsim , x0 (: , 5 ) ) ) ' ;
109 ys6=(lsim ( ss (m.A,m.B,m.C,m.D, Ts) ,u6 ' , tsim , x0 (: , 6 ) ) ) ' ;
110 err (1 ,: )=ys1 (1 ,0.2/ Ts :1.5/ Ts −1)−y1 (1 ,0.2/ Ts :1.5/ Ts −1) ;
111 err (2 ,: )=ys2 (1 ,0.2/ Ts :1.5/ Ts −1)−y2 (1 ,0.2/ Ts :1.5/ Ts −1) ;
112 err (3 ,: )=ys3 (1 ,0.2/ Ts :1.5/ Ts −1)−y3 (1 ,0.2/ Ts :1.5/ Ts −1) ;
113 err (4 ,: )=ys4 (1 ,0.2/ Ts :1.5/ Ts −1)−y4 (1 ,0.2/ Ts :1.5/ Ts −1) ;
114 err (5 ,: )=ys5 (1 ,0.2/ Ts :1.5/ Ts −1)−y5 (1 ,0.2/ Ts :1.5/ Ts −1) ;
115 err (6 ,: )=ys6 (1 ,0.2/ Ts :1.5/ Ts −1)−y6 (1 ,0.2/ Ts :1.5/ Ts −1) ;
116 count=0;
117 % f o r i =1:6
118 %
f o r j =1: length ( err )
119 %
i f ( isnan ( err ( i , j ) ) | | i s i n f ( err ( i , j ) ) )
120 %
count=count+1;
121 %
err ( i , j )=err ( i , j −1) ;
122 %
end
123 %
end
124 % end
125 uerr=zeros (6 , length (tFT1) ,6) ;
126 u_err ( : , : , 1 ) =[IFT1 ( 1 , :) ; IFT1 ( 2 , : ) ; IFT1 (3 ,: ) ; IFT1 ( 4 , :) ; ys1 (1 ,0.2/ Ts :1.5/
79
Cap. 4
Conclusioni e sviluppi futuri
Ts −1) ] ;
127 u_err ( : , : , 2 ) =[IFT2 ( 1 , :) ; IFT2 ( 2 , : ) ; IFT2 (3 ,: ) ; IFT2 ( 4 , :) ; ys2 (1 ,0.2/ Ts :1.5/
Ts −1) ] ;
128 u_err ( : , : , 3 ) =[IFT3 ( 1 , :) ; IFT3 ( 2 , : ) ; IFT3 (3 ,: ) ; IFT3 ( 4 , :) ; ys3 (1 ,0.2/ Ts :1.5/
Ts −1) ] ;
129 u_err ( : , : , 4 ) =[IFT4 ( 1 , :) ; IFT4 ( 2 , : ) ; IFT4 (3 ,: ) ; IFT4 ( 4 , :) ; ys4 (1 ,0.2/ Ts :1.5/
Ts −1) ] ;
130 u_err ( : , : , 5 ) =[IFT5 ( 1 , :) ; IFT5 ( 2 , : ) ; IFT5 (3 ,: ) ; IFT5 ( 4 , :) ; ys5 (1 ,0.2/ Ts :1.5/
Ts −1) ] ;
131 u_err ( : , : , 6 ) =[IFT6 ( 1 , :) ; IFT6 ( 2 , : ) ; IFT6 (3 ,: ) ; IFT6 ( 4 , :) ; ys6 (1 ,0.2/ Ts :1.5/
Ts −1) ] ;
132 % f o r z=1:6
133 %
f o r i =1:6
134 %
f o r j =1: length ( u_err )
135 %
i f ( isnan ( err ( i , j ) ) | | i s i n f ( err ( i , j ) ) )
136 %
count=count+1;
137 %
u_err ( i , j , z )=err ( i , j −1,z ) ;
138 %
end
139 %
end
140 %
end
141 % end
142
143 %%
144
145 data_err=merge ( iddata ( err ( 1 ,: ) ' , u_err ( : , : , 1 ) ' ,Ts , 'Domain ' , 'Time ' ) . . .
146
, iddata ( err ( 2 ,: ) ' , u_err ( : , : , 2 ) ' ,Ts , 'Domain ' , 'Time ' ) . . .
147
, iddata ( err ( 3 ,: ) ' , u_err ( : , : , 3 ) ' ,Ts , 'Domain ' , 'Time ' ) . . .
148
, iddata ( err ( 4 ,: ) ' , u_err ( : , : , 4 ) ' ,Ts , 'Domain ' , 'Time ' ) . . .
149
, iddata ( err ( 5 ,: ) ' , u_err ( : , : , 5 ) ' ,Ts , 'Domain ' , 'Time ' ) . . .
150
, iddata ( err ( 6 ,: ) ' , u_err ( : , : , 6 ) ' ,Ts , 'Domain ' , 'Time ' ) ) ;
151 m_err=n4sid ( data_err ,8 , ' MaxIter ' ,1000 , ' Tolerance ' ,1e −10) ;
152 figure ( f i g )
153 f i g=f i g +1;
154 compare ( data_err , m_err) ;
155
156 %% Verifica del modello complessivo
157
158 shot=load ( ' 31937.mat ' ) ;
159 [ I , I r i f , t]= CostruzioneSegnali3 ( shot , Ts) ;
160 [ IF1 , I_rifF1 , IFT , I_rifFT , IF2 , I_rifF2 , tF1 , tFT , tF2]= SeparazioneSegnali2 ( I ,
I r i f , t , Ts) ;
161
162 u=[ I ( 1 , :) ; I ( 2 , :) ; I (3 , : ) ; I (4 ,: ) ] ;
163 y=I ( 5 ,: ) ;
164 tsim=t ;
165 data=iddata (y ' ,u ' ,Ts , 'Domain ' , 'Time ' ) ;
166 [ yh , fit , x01]=compare ( data ,m) ;
167 x01=cell2mat ( x01 ) ;
168 ys=(lsim ( ss (m.A,m.B,m.C,m.D, Ts) ,u ' , tsim ' , x01 ) ) ' ;
169 A=m.A;
170 B=m.B;
80
Cap. 4
Conclusioni e sviluppi futuri
171 C=m.C;
172 D=m.D;
173 signals=struct ( ' values ' ,u ' , ' dimension ' ,[4 , length (u) ] ' ) ;
174 var_u=struct ( ' time ' , t ' , ' signals ' , signals ) ;
175
176 u_err=[IFT (1 ,: ) ; IFT ( 2 , :) ; IFT ( 3 , :) ; IFT (4 ,: ) ; ys (1 ,0.2/ Ts :1.5/ Ts −1) ] ;
177 data=iddata (( ys (1 ,0.2/ Ts :1.5/ Ts −1)−y (1 ,0.2/ Ts :1.5/ Ts −1)) ' , u_err ' ,Ts , '
Domain ' , 'Time ' ) ;
178 [ yerr , f i t e r r , x0err ]=compare ( data , m_err) ;
179 x0err=cell2mat ( x0err ) ;
180 err=(lsim ( ss (m_err .A, m_err .B, m_err .C, m_err .D, Ts) , u_err ' ,tFT1 , x0err ) ) ' ;
181 Ae=m_err .A;
182 Be=m_err .B;
183 Ce=m_err .C;
184 De=m_err . d ;
185 err_esteso=zeros (1 , length (y) ) ;
186 err_esteso (1 ,0.2/ Ts :1.5/ Ts −1)=err ;
187 % Filtraggio d e l l ' errore
188 e r r f=lsim ( c2d ( t f ( [ 1 ] , [ 0 . 0 1 1]) ,Ts) , err_esteso , tsim ) ' ;
189
190 figure ( f i g )
191 f i g=f i g +1;
192 plot (tFT1 , err , 'b ' , tsim , errf , 'k ' ) ;
193
194 figure ( f i g )
195 f i g=f i g +1;
196 hold on , grid on
197 plot (tFT1 , ( ys (1 ,0.2/ Ts :1.5/ Ts −1)−y (1 ,0.2/ Ts :1.5/ Ts −1)) , ' r ' , ' LineWidth '
,2) ;
198 plot (tFT1 , err , 'b ' , ' LineWidth ' ,2)
199 legend ( ' mismatch reale ' , ' mismatch stimato ' )
200 t i t l e ( ' Stima del mismatch ' )
201
202 figure ( f i g )
203 f i g=f i g +1;
204 subplot (2 ,1 ,1)
205 hold on , grid on
206 plot ( tsim , y , 'b ' , tsim , ys , 'g ' ) ;
207 legend ( ' reale ' , ' stimata senza correzione ' ) ;
208 subplot (2 ,1 ,2)
209 hold on , grid on
210 plot ( tsim , y , 'b ' , tsim , ys− errf , 'g ' ) ;
211 legend ( ' reale ' , ' stimata con correzione ' ) ;
212
213 figure ( f i g )
214 f i g=f i g +1;
215 hold on , grid on
216 plot ( tsim , y , 'k ' , ' LineWidth ' ,2) ;
217 plot ( tsim , ys , 'g ' , ' Linewidth ' ,2) ;
218 legend ( 'I_{PLA} ' , 'I_{PLA} stimata ' ) ;
219
81
Cap. 4
Conclusioni e sviluppi futuri
220 figure ( f i g )
221 f i g=f i g +1;
222 hold on , grid on
223 plot ( tsim , y , 'k ' , ' LineWidth ' ,2) ;
224 plot ( tsim , ys− errf , 'g ' , ' Linewidth ' ,2) ;
225 legend ( 'I_{PLA} ' , 'I_{PLA} stimata ' ) ;
226 t i t l e ( ' Id en t if ic a zi on e della corrente di plasma ' )
227
228 % Modello u t i l i z z a t o n e l l ' i d e n t i f i c a z i o n e greybox della correntedi
Plasma
229 function [A,B,C,D,K, x0]= mymodelD_Ipla2(p , Ts , s i )
230
231 A=[ 1 Ts ;
232 p(1) p(2) ] ;
233
234
235 B=[p(3) p(4) p(5) p(6) ;
236 p(7) p(8) p(9) p(10) ] ;
237
238 C=[1 0 ] ;
239 D=zeros (1 ,4) ;
240
241 K=zeros (2 ,1) ;
242 x0 =[0;0];
Software per l'identicazione delle correnti erogate dalle coils V, F, T: IV , IF , IT
1 clear a l l ;
2 clc ;
3
4 %% Caricamento segnali
5
6 Ts=0.0005;
7 shot1=load ( ' 31937.mat ' ) ;
8 shot2=load ( ' 31938.mat ' ) ;
9 shot3=load ( ' 31939.mat ' ) ;
10 shot4=load ( ' 31959.mat ' ) ;
11 shot5=load ( ' 31958.mat ' ) ;
12 shot6=load ( ' 31907.mat ' ) ;
13 f i g =1;
14 %% Separazione dei segnali
15 [ I1 , Ir if1 , t1]= CostruzioneSegnali3 ( shot1 , Ts) ;
16 [ I2 , Ir if2 , t2]= CostruzioneSegnali3 ( shot2 , Ts) ;
17 [ I3 , Ir if3 , t3]= CostruzioneSegnali3 ( shot3 , Ts) ;
18 [ I4 , Ir if4 , t4]= CostruzioneSegnali3 ( shot4 , Ts) ;
19 [ I5 , Ir if5 , t5]= CostruzioneSegnali3 ( shot5 , Ts) ;
20 [ I6 , Ir if6 , t6]= CostruzioneSegnali3 ( shot6 , Ts) ;
21
22
23 %% Ora scelgo input e output del sistema da i d e n t i f i c a r e
24 %u=[Iv ; I f ; It ; Ih ]
82
Cap. 4
Conclusioni e sviluppi futuri
25 %y=[ Ipla ]
26 u1=[ I r i f 1 ( 1 ,: ) ; I r i f 1 ( 2 ,: ) ; I r i f 1 ( 3 ,: ) ; I1 ( 4 , :) ; I1 ( 5 , :) ] ;
27 y1=[I1 ( 1 ,: ) ; I1 ( 2 , :) ; I1 ( 3 , :) ] ;
28 u2=[ I r i f 2 ( 1 ,: ) ; I r i f 2 ( 2 ,: ) ; I r i f 2 ( 3 ,: ) ; I2 ( 4 , :) ; I2 ( 5 , :) ] ;
29 y2=[I2 ( 1 ,: ) ; I2 ( 2 , :) ; I2 ( 3 , :) ] ;
30 u3=[ I r i f 3 ( 1 ,: ) ; I r i f 3 ( 2 ,: ) ; I r i f 3 ( 3 ,: ) ; I3 ( 4 , :) ; I3 ( 5 , :) ] ;
31 y3=[I3 ( 1 ,: ) ; I3 ( 2 , :) ; I3 ( 3 , :) ] ;
32 u4=[ I r i f 4 ( 1 ,: ) ; I r i f 4 ( 2 ,: ) ; I r i f 4 ( 3 ,: ) ; I4 ( 4 , :) ; I4 ( 5 , :) ] ;
33 y4=[I4 ( 1 ,: ) ; I4 ( 2 , :) ; I4 ( 3 , :) ] ;
34 u5=[ I r i f 5 ( 1 ,: ) ; I r i f 5 ( 2 ,: ) ; I r i f 5 ( 3 ,: ) ; I5 ( 4 , :) ; I5 ( 5 , :) ] ;
35 y5=[I5 ( 1 ,: ) ; I5 ( 2 , :) ; I5 ( 3 , :) ] ;
36 u6=[ I r i f 6 ( 1 ,: ) ; I r i f 6 ( 2 ,: ) ; I r i f 6 ( 3 ,: ) ; I6 ( 4 , :) ; I6 ( 5 , :) ] ;
37 y6=[I6 ( 1 ,: ) ; I6 ( 2 , :) ; I6 ( 3 , :) ] ;
38 tsim=t1 ;
39
40 %% Id e nt if i ca zi o ne del modello
41
42 %data=iddata ( yf ' , uf ' ,Ts , 'Domain ' , 'Time ' ) ;
43 data=merge ( iddata (y1 ' ,u1 ' ,Ts , 'Domain ' , 'Time ' ) , iddata (y2 ' ,u2 ' ,Ts , 'Domain '
, 'Time ' ) . . .
44
, iddata (y3 ' ,u3 ' ,Ts , 'Domain ' , 'Time ' ) , iddata (y4 ' ,u4 ' ,Ts , 'Domain
' , 'Time ' ) . . .
45
, iddata (y5 ' ,u5 ' ,Ts , 'Domain ' , 'Time ' ) , iddata (y6 ' ,u6 ' ,Ts , 'Domain
' , 'Time ' ) ) ;
46
47 par=zeros (44 ,1) ;
48 par (2 ,1) =1;
49 par (10 ,1) =1;
50 par (18 ,1) =1;
51
52
53 mi=idgrey ( 'mymodelD_coilsVFT2 ' , par , 'd ' ,Ts) ;
54
55 %m=pem( data , mi , ' Criterion ' , 'Det ' , ' Focus ' , ' Stability ' , ' MaxIter ' ,1000 , '
Tolerance ' ,1e −10) ;
56 m=n4sid ( data ,6 , ' Focus ' , ' Stability ' , ' MaxIter ' ,600 , ' Tolerance ' ,1e −8) ;
57
58
59 %% Verifica del modello stimato
60
61 %matrici del modello i d e n t i f i c a t o
62 A=m.A;
63 B=m.B;
64 C=m.C;
65 D=m.D;
66 x0s=m. x0 ;
67 autovalori=abs ( eig (A) ) ;
68 figure ( f i g )
69 f i g=f i g +1;
70 [ yh , fit , x0]=compare ( data ,m) ;
71 compare ( data ,m, ' I n i t i a l S t a t e ' , ' e ' )
83
Cap. 4
Conclusioni e sviluppi futuri
72 x0=cell2mat (x0) ;
73
74
75 %% Prova del modello ottenuto
76 shot=load ( ' 31937.mat ' ) ;
77 [ I , I r i f , t]= CostruzioneSegnali3 ( shot , Ts) ;
78 [ IF1 , I_rifF1 , IFT , I_rifFT , IF2 , I_rifF2 , tF1 , tFT , tF2]= SeparazioneSegnali2 ( I ,
I r i f , t , Ts) ;
79 u=[ I r i f ( 1 , :) ; I r i f ( 2 , :) ; I r i f ( 3 , :) ; I ( 4 , :) ; I (5 , : ) ] ;
80 y=[ I ( 1 ,: ) ; I ( 2 , :) ; I ( 3 , :) ] ;
81
82 % g r a f i c i dei segnali u t i l i z z a t i
83
84 figure ( f i g )
85 f i g = f i g +1;
86 hold on , grid on ,
87 plot ( tsim , u ( 1 , :) , 'k ' , ' LineWidth ' ,2) ;
88 plot ( tsim , u ( 2 , :) , 'g ' , ' LineWidth ' ,2) ;
89 plot ( tsim , u ( 3 , :) , 'b ' , ' LineWidth ' ,2) ;
90 plot ( tsim , u ( 4 , :) , ' r ' , ' LineWidth ' ,2) ;
91 plot ( tsim , u ( 5 , :) , 'y ' , ' LineWidth ' ,2) ;
92 legend ( 'V_{ r i f } ' , 'F_{ r i f } ' , 'T_{ t i f } ' , 'H' , 'Plasma ' )
93
94 figure ( f i g )
95 f i g = f i g +1;
96 hold on , grid on ,
97 plot ( tsim , y ( 1 , :) , 'k ' , ' LineWidth ' ,2) ;
98 plot ( tsim , y ( 2 , :) , 'g ' , ' LineWidth ' ,2) ;
99 plot ( tsim , y ( 3 , :) , 'b ' , ' LineWidth ' ,2) ;
100 legend ( 'V' , 'F ' , 'T' )
101
102
103 %data=iddata ( yf ' , uf ' ,Ts , 'Domain ' , 'Time ' ) ;
104 data=iddata (y ' ,u ' ,Ts , 'Domain ' , 'Time ' ) ;
105
106 figure ( f i g )
107 f i g=f i g +1;
108 grid on
109 compare ( data ,m) ;
110 [ yh , fit , x0]=compare ( data ,m) ;
111 x0=cell2mat (x0) ;
112
113
114 ys=(lsim ( ss (m.A,m.B,m.C,m.D, Ts) ,u ' , tsim , x0) ) ' ;
115 figure ( f i g )
116 f i g = f i g +1;
117 subplot (3 ,1 ,1)
118 hold on , grid on ,
119 t i t l e ( [ ' Coil V −−> Fitting : ' , num2str ( f i t ( : , : , 1 ) ) , ' %' ] ) ;
120 plot ( tsim , y ( 1 ,: ) , 'k ' , ' LineWidth ' ,2) ;
121 plot ( tsim , ys (1 , : ) , 'g ' , ' LineWidth ' ,2) ;
84
Cap. 4
Conclusioni e sviluppi futuri
122 legend ( 'I_V ' , 'I_V Stimata ' )
123
124 subplot (3 ,1 ,2)
125 hold on , grid on ,
126 plot ( tsim , y ( 2 ,: ) , 'k ' , ' LineWidth ' ,2) ;
127 plot ( tsim , ys (2 , : ) , 'g ' , ' LineWidth ' ,2) ;
128 t i t l e ( [ ' Coil F −−> Fitting : ' , num2str ( f i t ( : , : , 2 ) ) , ' %' ] ) ;
129 legend ( 'I_F ' , 'I_F Stimata ' )
130
131 subplot (3 ,1 ,3)
132 hold on , grid on ,
133 plot ( tsim , y ( 3 ,: ) , 'k ' , ' LineWidth ' ,2) ;
134 plot ( tsim , ys (3 , : ) , 'g ' , ' LineWidth ' ,2) ;
135 t i t l e ( [ ' Coil T −−> Fitting : ' , num2str ( f i t ( : , : , 3 ) ) , ' %' ] ) ;
136 legend ( 'I_T ' , 'I_T Stimata ' )
137
138 % Modello greybox u t i l i z z a t o per l ' i d e n t i f i c a z i o n e
139 function [A,B,C,D,K, x0]= mymodelD_coilsVFT2(p , Ts , s i )
140
141 A=[ 1 Ts 0 0 0 0 ;
142 p(1) p(2) p(3) p(4) p(5) p(6) ;
143
0 0 1 Ts 0 0 ;
144 p(7) p(8) p(9) p(10) p(11) p(12) ;
145
0 0 0 0 1 Ts ;
146 p(13) p(14) p(15) p(16) p(17) p(18) ] ;
147
148
149 B=[p(19) p(20) p(21) p(22) p(23) ;
150 p(20) p(21) p(22) p(23) p(24) ;
151 p(25) p(26) p(27) p(28) p(29) ;
152 p(30) p(31) p(32) p(33) p(34) ;
153 p(35) p(36) p(37) p(38) p(39) ;
154 p(40) p(41) p(42) p(43) p(44) ] ;
155
156 C=[1 0 0 0 0 0;
157 0 0 1 0 0 0;
158 0 0 0 0 1 0 ] ;
159 %C=[p(49) p(50) p(51) p(52) p(53) p(54) 1 p(55) ] ;
160 D=[1 0 0 0 0;
161 0 1 0 0 0;
162 0 0 1 0 0 ] ;
163
164 K=zeros (6 ,3) ;
165 %x0=[p(49) ; 0 ; p(50) ; 0 ; p(51) ; 0 ; p(52) ; 0 ] ;
166 x0 = [ 0 ; 0 ; 0 ; 0 ; 0 ; 0 ] ;
Software per l'identicazione della corrente erogata dalla coil H, IH
1 clear a l l ;
2 clc ;
3
85
Cap. 4
Conclusioni e sviluppi futuri
4 %% Caricamento segnali
5
6 Ts=0.0005;
7 shot1=load ( ' 31937.mat ' ) ;
8 shot2=load ( ' 31938.mat ' ) ;
9 shot3=load ( ' 31939.mat ' ) ;
10 shot4=load ( ' 31959.mat ' ) ;
11 shot5=load ( ' 31958.mat ' ) ;
12 shot6=load ( ' 31907.mat ' ) ;
13 f i g =1;
14 %% Separazione dei segnali
15 [ I1 , Ir if1 , t1]= CostruzioneSegnali3 ( shot1 , Ts) ;
16 [ I2 , Ir if2 , t2]= CostruzioneSegnali3 ( shot2 , Ts) ;
17 [ I3 , Ir if3 , t3]= CostruzioneSegnali3 ( shot3 , Ts) ;
18 [ I4 , Ir if4 , t4]= CostruzioneSegnali3 ( shot4 , Ts) ;
19 [ I5 , Ir if5 , t5]= CostruzioneSegnali3 ( shot5 , Ts) ;
20 [ I6 , Ir if6 , t6]= CostruzioneSegnali3 ( shot6 , Ts) ;
21 tsim=t1 ;
22
23 %% Ora scelgo input e output del sistema da i d e n t i f i c a r e
24
25 u1=[I1 ( 1 , :) ; I1 ( 2 , :) ; I1 ( 3 , : ) ; I r i f 1 ( 4 , : ) ; I1 (5 ,: ) ] ;
26 y1=I1 (4 ,: ) ;
27 u2=[I2 ( 1 , :) ; I2 ( 2 , :) ; I2 ( 3 , : ) ; I r i f 2 ( 4 , : ) ; I2 (5 ,: ) ] ;
28 y2=I2 (4 ,: ) ;
29 u3=[I3 ( 1 , :) ; I3 ( 2 , :) ; I3 ( 3 , : ) ; I r i f 3 ( 4 , : ) ; I3 (5 ,: ) ] ;
30 y3=I3 (4 ,: ) ;
31 u4=[I4 ( 1 , :) ; I4 ( 2 , :) ; I4 ( 3 , : ) ; I r i f 4 ( 4 , : ) ; I4 (5 ,: ) ] ;
32 y4=I4 (4 ,: ) ;
33 u5=[I5 ( 1 , :) ; I5 ( 2 , :) ; I5 ( 3 , : ) ; I r i f 5 ( 4 , : ) ; I5 (5 ,: ) ] ;
34 y5=I5 (4 ,: ) ;
35 u6=[I6 ( 1 , :) ; I6 ( 2 , :) ; I6 ( 3 , : ) ; I r i f 6 ( 4 , : ) ; I6 (5 ,: ) ] ;
36 y6=I6 (4 ,: ) ;
37
38 %% Id e nt if i ca zi o ne del modello
39
40 data=merge ( iddata (y1 ' ,u1 ' ,Ts , 'Domain ' , 'Time ' ) , iddata (y2 ' ,u2 ' ,Ts , 'Domain '
, 'Time ' ) . . .
41
, iddata (y3 ' ,u3 ' ,Ts , 'Domain ' , 'Time ' ) , iddata (y4 ' ,u4 ' ,Ts , 'Domain
' , 'Time ' ) . . .
42
, iddata (y5 ' ,u5 ' ,Ts , 'Domain ' , 'Time ' ) , iddata (y6 ' ,u6 ' ,Ts , 'Domain
' , 'Time ' ) ) ;
43
44 par=zeros (12 ,1) ;
45 par (2 ,1) =1;
46
47 mi=idgrey ( 'mymodelD_coilsH ' , par , 'd ' ,Ts) ;
48 m=pem( data , mi , ' Criterion ' , 'Det ' , ' Focus ' , ' Stability ' , ' MaxIter ' ,1000 , '
Tolerance ' ,1e −10) ;
49 %m=pem( data ,8 , ' Focus ' , ' Stability ' , ' MaxIter ' ,600 , ' Tolerance ' ,1e −8) ;
50
86
Cap. 4
Conclusioni e sviluppi futuri
51
52 %% Verifica del modello stimato
53
54 %matrici del modello i d e n t i f i c a t o
55 A=m.A;
56 B=m.B;
57 C=m.C;
58 D=m.D;
59 x0s=m. x0 ;
60 autovalori=abs ( eig (A) ) ;
61 figure ( f i g )
62 f i g=f i g +1;
63 [ yh , fit , x0]=compare ( data ,m) ;
64 compare ( data ,m, ' I n i t i a l S t a t e ' , ' e ' )
65 x0=cell2mat (x0) ;
66
67
68 %% Prova del modello ottenuto
69 shot=load ( ' 31909.mat ' ) ;
70 [ I , I r i f , t]= CostruzioneSegnali3 ( shot , Ts) ;
71 [ IF1 , I_rifF1 , IFT , I_rifFT , IF2 , I_rifF2 , tF1 , tFT , tF2]= SeparazioneSegnali2 ( I ,
I r i f , t , Ts) ;
72 u=[ I ( 1 , :) ; I ( 2 , :) ; I (3 ,: ) ; I r i f (4 ,: ) ; I ( 5 ,: ) ] ;
73 y=I ( 4 ,: ) ;
74
75 % data=iddata ( yf ' , uf ' ,Ts , 'Domain ' , 'Time ' ) ;
76 data=iddata (y ' ,u ' ,Ts , 'Domain ' , 'Time ' ) ;
77
78 [ yh , fit , x0]=compare ( data ,m) ;
79 x0=cell2mat (x0) ;
80
81 ys=(lsim ( ss (m.A,m.B,m.C,m.D, Ts) ,u ' , tsim , x0) ) ' ;
82
83 figure ( f i g )
84 f i g = f i g +1;
85 hold on , grid on ,
86 t i t l e ( ' Coil H' ) ;
87 plot ( tsim , y ( 1 , :) , 'k ' , ' LineWidth ' ,2) ;
88 plot ( tsim , u ( 4 , :) , 'b ' , ' LineWidth ' ,2) ;
89 legend ( 'I_H ' , 'I_{ Hrif } ' )
90
91
92 figure ( f i g )
93 f i g = f i g +1;
94 hold on , grid on ,
95 t i t l e ( ' Coil H ' ) ;
96 plot ( tsim , y ( 1 , :) , 'k ' , ' LineWidth ' ,2) ;
97 plot ( tsim , ys (1 , : ) , 'g ' , ' LineWidth ' ,2) ;
98 legend ( 'I_H ' , 'I_H stimata ' )
99
100 % Modello grey −box u t i l i z z a t o n e l l ' i d e n t i f i c a z i o n e
87
Cap. 4
Conclusioni e sviluppi futuri
101 function [A,B,C,D,K, x0]= mymodelD_coilsH(p , Ts , s i )
102
103 A=[ 1 Ts ;
104 p(1) p(2) ] ;
105
106
107 B=[p(3) p(4) p(5) p(6) p(7) ;
108 p(8) p(9) p(10) p(11) p(12) ] ;
109
110 C=[1 0 ] ;
111
112 D=[0 0 0 1 0 ] ;
113
114 K=zeros (2 ,1) ;
115 x0 =[0;0];
Software per l'identicazione della mappa statica per la ricostruzione del ∆Ψ
1 clear a l l ;
2 clc ;
3
4 %% Caricamento dei segnali
5
6 Ts=0.0005;
7 stop_time=2;
8 s1=load ( ' DatiMoreno /35800.mat ' );%disrompe
9 s2=load ( ' DatiMoreno /35802.mat ' );%disrompe
10 s3=load ( ' DatiMoreno /35803.mat ' );%buono
11 s4=load ( ' DatiMoreno /35804.mat ' );% o s c i l l a z i o n i
12 s5=load ( ' DatiMoreno /31959.mat ' );%buono
13 s6=load ( ' DatiMoreno /32771.mat ' );%buono
14 s7=load ( ' DatiMoreno /31851.mat ' );% allocatore
15 s8=load ( ' DatiMoreno /32093.mat ' );%buono
16 s8=load ( ' DatiMoreno /30639.mat ' );%buono
17
18 f i g =1;
19
20 %% Manipolazione Segnali
21
22 [DEP1,DEP01, t]= CostruzioneSegnale ( s1 .DEP. y , s1 .DEP. x , Ts) ;
23 [ IF1 , IF01 , t]= CostruzioneSegnale ( s1 . IF . y , s1 . IF . x , Ts) ;
24 [ IV1 , IV01 , t]= CostruzioneSegnale ( s1 . IV . y , s1 . IV . x , Ts) ;
25 [ IT1 , IT01 , t]= CostruzioneSegnale ( s1 . IT . y , s1 . IT . x , Ts) ;
26 [ IH1 , IH01 , t]= CostruzioneSegnale ( s1 . IH . y , s1 . IH . x , Ts) ;
27 [ IPLA1 , IPLA01 , t]= CostruzioneSegnale ( s1 . IP . y , s1 . IP . x , Ts) ;
28
29 [DEP2,DEP02, t]= CostruzioneSegnale ( s2 .DEP. y , s2 .DEP. x , Ts) ;
30 [ IF2 , IF02 , t]= CostruzioneSegnale ( s2 . IF . y , s2 . IF . x , Ts) ;
31 [ IV2 , IV02 , t]= CostruzioneSegnale ( s2 . IV . y , s2 . IV . x , Ts) ;
32 [ IT2 , IT02 , t]= CostruzioneSegnale ( s2 . IT . y , s2 . IT . x , Ts) ;
33 [ IH2 , IH02 , t]= CostruzioneSegnale ( s2 . IH . y , s2 . IH . x , Ts) ;
88
Cap. 4
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
Conclusioni e sviluppi futuri
[ IPLA2 , IPLA02 , t]= CostruzioneSegnale ( s2 . IP . y , s2 . IP . x , Ts) ;
[DEP3,DEP03, t]= CostruzioneSegnale ( s3 .DEP. y , s3 .DEP. x , Ts) ;
[ IF3 , IF03 , t]= CostruzioneSegnale ( s3 . IF . y , s3 . IF . x , Ts) ;
[ IV3 , IV03 , t]= CostruzioneSegnale ( s3 . IV . y , s3 . IV . x , Ts) ;
[ IT3 , IT03 , t]= CostruzioneSegnale ( s3 . IT . y , s3 . IT . x , Ts) ;
[ IH3 , IH03 , t]= CostruzioneSegnale ( s3 . IH . y , s3 . IH . x , Ts) ;
[ IPLA3 , IPLA03 , t]= CostruzioneSegnale ( s3 . IP . y , s3 . IP . x , Ts) ;
[DEP4,DEP04, t]= CostruzioneSegnale ( s4 .DEP. y , s4 .DEP. x , Ts) ;
[ IF4 , IF04 , t]= CostruzioneSegnale ( s4 . IF . y , s4 . IF . x , Ts) ;
[ IV4 , IV04 , t]= CostruzioneSegnale ( s4 . IV . y , s4 . IV . x , Ts) ;
[ IT4 , IT04 , t]= CostruzioneSegnale ( s4 . IT . y , s4 . IT . x , Ts) ;
[ IH4 , IH04 , t]= CostruzioneSegnale ( s4 . IH . y , s4 . IH . x , Ts) ;
[ IPLA4 , IPLA04 , t]= CostruzioneSegnale ( s4 . IP . y , s4 . IP . x , Ts) ;
[DEP5,DEP05, t]= CostruzioneSegnale ( s5 .DEP. y , s5 .DEP. x , Ts) ;
[ IF5 , IF05 , t]= CostruzioneSegnale ( s5 . IF . y , s5 . IF . x , Ts) ;
[ IV5 , IV05 , t]= CostruzioneSegnale ( s5 . IV . y , s5 . IV . x , Ts) ;
[ IT5 , IT05 , t]= CostruzioneSegnale ( s5 . IT . y , s5 . IT . x , Ts) ;
[ IH5 , IH05 , t]= CostruzioneSegnale ( s5 . IH . y , s5 . IH . x , Ts) ;
[ IPLA5 , IPLA05 , t]= CostruzioneSegnale ( s5 . IP . y , s5 . IP . x , Ts) ;
[DEP6,DEP06, t]= CostruzioneSegnale ( s6 .DEP. y , s6 .DEP. x , Ts) ;
[ IF6 , IF06 , t]= CostruzioneSegnale ( s6 . IF . y , s6 . IF . x , Ts) ;
[ IV6 , IV06 , t]= CostruzioneSegnale ( s6 . IV . y , s6 . IV . x , Ts) ;
[ IT6 , IT06 , t]= CostruzioneSegnale ( s6 . IT . y , s6 . IT . x , Ts) ;
[ IH6 , IH06 , t]= CostruzioneSegnale ( s6 . IH . y , s6 . IH . x , Ts) ;
[ IPLA6 , IPLA06 , t]= CostruzioneSegnale ( s6 . IP . y , s6 . IP . x , Ts) ;
[DEP7,DEP07, t]= CostruzioneSegnale ( s7 .DEP. y , s7 .DEP. x , Ts) ;
[ IF7 , IF07 , t]= CostruzioneSegnale ( s7 . IF . y , s7 . IF . x , Ts) ;
[ IV7 , IV07 , t]= CostruzioneSegnale ( s7 . IV . y , s7 . IV . x , Ts) ;
[ IT7 , IT07 , t]= CostruzioneSegnale ( s7 . IT . y , s7 . IT . x , Ts) ;
[ IH7 , IH07 , t]= CostruzioneSegnale ( s7 . IH . y , s7 . IH . x , Ts) ;
[ IPLA7 , IPLA07 , t]= CostruzioneSegnale ( s7 . IP . y , s7 . IP . x , Ts) ;
[DEP8,DEP08, t]= CostruzioneSegnale ( s8 .DEP. y , s8 .DEP. x , Ts) ;
[ IF8 , IF08 , t]= CostruzioneSegnale ( s8 . IF . y , s8 . IF . x , Ts) ;
[ IV8 , IV08 , t]= CostruzioneSegnale ( s8 . IV . y , s8 . IV . x , Ts) ;
[ IT8 , IT08 , t]= CostruzioneSegnale ( s8 . IT . y , s8 . IT . x , Ts) ;
[ IH8 , IH08 , t]= CostruzioneSegnale ( s8 . IH . y , s8 . IH . x , Ts) ;
[ IPLA8 , IPLA08 , t]= CostruzioneSegnale ( s8 . IP . y , s8 . IP . x , Ts) ;
dIF1=(lsim ( ss ( c2d ( t f ([1 0] ,[0.006 1]) ,Ts) ) ,( IF1 ) ' , t ) ) ' ;
dIV1=(lsim ( ss ( c2d ( t f ([1 0] ,[0.006 1]) ,Ts) ) ,( IV1) ' , t ) ) ' ;
dIPLA1=(lsim ( ss ( c2d ( t f ([1 0] ,[0.006 1]) ,Ts) ) ,(IPLA1) ' , t ) ) ' ;
dIF2=(lsim ( ss ( c2d ( t f ([1 0] ,[0.006 1]) ,Ts) ) ,( IF2 ) ' , t ) ) ' ;
dIV2=(lsim ( ss ( c2d ( t f ([1 0] ,[0.006 1]) ,Ts) ) ,( IV2) ' , t ) ) ' ;
dIPLA2=(lsim ( ss ( c2d ( t f ([1 0] ,[0.006 1]) ,Ts) ) ,(IPLA2) ' , t ) ) ' ;
dIF3=(lsim ( ss ( c2d ( t f ([1 0] ,[0.006 1]) ,Ts) ) ,( IF3 ) ' , t ) ) ' ;
89
Cap. 4
Conclusioni e sviluppi futuri
85 dIV3=(lsim ( ss ( c2d ( t f ([1 0] ,[0.006 1]) ,Ts) ) ,( IV3) ' , t ) ) ' ;
86 dIPLA3=(lsim ( ss ( c2d ( t f ([1 0] ,[0.006 1]) ,Ts) ) ,(IPLA3) ' , t ) ) ' ;
87 dIF4=(lsim ( ss ( c2d ( t f ([1 0] ,[0.006 1]) ,Ts) ) ,( IF4 ) ' , t ) ) ' ;
88 dIV4=(lsim ( ss ( c2d ( t f ([1 0] ,[0.006 1]) ,Ts) ) ,( IV4) ' , t ) ) ' ;
89 dIPLA4=(lsim ( ss ( c2d ( t f ([1 0] ,[0.006 1]) ,Ts) ) ,(IPLA4) ' , t ) ) ' ;
90
91 %% sparo3
92 c=1;
93 f o r i=f l o o r (0.3/ Ts) : f l o o r (1/Ts)
94
95
psi (c ,1)=DEP1(1 , i ) ;
96
M(c ,1)=IV1 (1 , i ) ;
97
M(c ,2)=IPLA1(1 , i ) ;
98
M(c ,3)=dIV1 (1 , i ) ;
99
M(c ,4)=dIPLA1(1 , i ) ;
100
M(c ,5) =1;
101
M(c ,6)=dIF1 (1 , i ) ;
102
M(c ,7)=IF1 (1 , i ) ;
103
c=c+1;
104
psi (c ,1)=DEP2(1 , i ) ;
105
M(c ,1)=IV2 (1 , i ) ;
106
M(c ,2)=IPLA2(1 , i ) ;
107
M(c ,3)=dIV2 (1 , i ) ;
108
M(c ,4)=dIPLA2(1 , i ) ;
109
M(c ,5) =1;
110
M(c ,6)=dIF2 (1 , i ) ;
111
M(c ,7)=IF2 (1 , i ) ;
112
c=c+1;
113
psi (c ,1)=DEP3(1 , i ) ;
114
M(c ,1)=IV3 (1 , i ) ;
115
M(c ,2)=IPLA3(1 , i ) ;
116
M(c ,3)=dIV3 (1 , i ) ;
117
M(c ,4)=dIPLA3(1 , i ) ;
118
M(c ,5) =1;
119
M(c ,6)=dIF3 (1 , i ) ;
120
M(c ,7)=IF3 (1 , i ) ;
121
c=c+1;
122
psi (c ,1)=DEP4(1 , i ) ;
123
M(c ,1)=IV4 (1 , i ) ;
124
M(c ,2)=IPLA4(1 , i ) ;
125
M(c ,3)=dIV4 (1 , i ) ;
126
M(c ,4)=dIPLA4(1 , i ) ;
127
M(c ,5) =1;
128
M(c ,6)=dIF4 (1 , i ) ;
129
M(c ,7)=IF4 (1 , i ) ;
130
c=c+1;
131
132 end
133
134 Minv=pinv (M) ;
135 X=Minv ∗ psi ;
90
Cap. 4
Conclusioni e sviluppi futuri
Software per l'identicazione del modello dinamico per la ricostruzione del ∆Ψ
1 clear a l l ;
2 clc ;
3
4 %% Caricamento dei segnali
5
6 Ts=0.0005;
7
8 stop_time=2;
9
10 shot1 =31626;
11 s1=load ( ' DatiMoreno /35800.mat ' ) ;
12 s2=load ( ' DatiMoreno /35802.mat ' ) ;
13 s3=load ( ' DatiMoreno /35803.mat ' ) ;
14 s4=load ( ' DatiMoreno /35804.mat ' ) ;
15 s5=load ( ' DatiMoreno /35798.mat ' ) ;
16 s6=load ( ' DatiMoreno /35797.mat ' ) ;
17 s7=load ( ' DatiMoreno /35796.mat ' ) ;
18
19 f i g =1;
20
21 %% Manipolazione Segnali
22
23 [DEP1,DEP01, t]= CostruzioneSegnale ( s1 .DEP. y , s1 .DEP. x , Ts) ;
24 [ IF1 , IF01 , t]= CostruzioneSegnale ( s1 . IF . y , s1 . IF . x , Ts) ;
25 [ IV1 , IV01 , t]= CostruzioneSegnale ( s1 . IV . y , s1 . IV . x , Ts) ;
26 [ IT1 , IT01 , t]= CostruzioneSegnale ( s1 . IT . y , s1 . IT . x , Ts) ;
27 [ IH1 , IH01 , t]= CostruzioneSegnale ( s1 . IH . y , s1 . IH . x , Ts) ;
28 [ IPLA1 , IPLA01 , t]= CostruzioneSegnale ( s1 . IP . y , s1 . IP . x , Ts) ;
29
30 [DEP2,DEP02, t]= CostruzioneSegnale ( s2 .DEP. y , s2 .DEP. x , Ts) ;
31 [ IF2 , IF02 , t]= CostruzioneSegnale ( s2 . IF . y , s2 . IF . x , Ts) ;
32 [ IV2 , IV02 , t]= CostruzioneSegnale ( s2 . IV . y , s2 . IV . x , Ts) ;
33 [ IT2 , IT02 , t]= CostruzioneSegnale ( s2 . IT . y , s2 . IT . x , Ts) ;
34 [ IH2 , IH02 , t]= CostruzioneSegnale ( s2 . IH . y , s2 . IH . x , Ts) ;
35 [ IPLA2 , IPLA02 , t]= CostruzioneSegnale ( s2 . IP . y , s2 . IP . x , Ts) ;
36
37 [DEP3,DEP03, t]= CostruzioneSegnale ( s3 .DEP. y , s3 .DEP. x , Ts) ;
38 [ IF3 , IF03 , t]= CostruzioneSegnale ( s3 . IF . y , s3 . IF . x , Ts) ;
39 [ IV3 , IV03 , t]= CostruzioneSegnale ( s3 . IV . y , s3 . IV . x , Ts) ;
40 [ IT3 , IT03 , t]= CostruzioneSegnale ( s3 . IT . y , s3 . IT . x , Ts) ;
41 [ IH3 , IH03 , t]= CostruzioneSegnale ( s3 . IH . y , s3 . IH . x , Ts) ;
42 [ IPLA3 , IPLA03 , t]= CostruzioneSegnale ( s3 . IP . y , s3 . IP . x , Ts) ;
43
44 [DEP4,DEP04, t]= CostruzioneSegnale ( s4 .DEP. y , s4 .DEP. x , Ts) ;
45 [ IF4 , IF04 , t]= CostruzioneSegnale ( s4 . IF . y , s4 . IF . x , Ts) ;
46 [ IV4 , IV04 , t]= CostruzioneSegnale ( s4 . IV . y , s4 . IV . x , Ts) ;
47 [ IT4 , IT04 , t]= CostruzioneSegnale ( s4 . IT . y , s4 . IT . x , Ts) ;
48 [ IH4 , IH04 , t]= CostruzioneSegnale ( s4 . IH . y , s4 . IH . x , Ts) ;
49 [ IPLA4 , IPLA04 , t]= CostruzioneSegnale ( s4 . IP . y , s4 . IP . x , Ts) ;
50
91
Cap. 4
Conclusioni e sviluppi futuri
51 [DEP5,DEP05, t]= CostruzioneSegnale ( s5 .DEP. y , s5 .DEP. x , Ts) ;
52 [ IF5 , IF05 , t]= CostruzioneSegnale ( s5 . IF . y , s5 . IF . x , Ts) ;
53 [ IV5 , IV05 , t]= CostruzioneSegnale ( s5 . IV . y , s5 . IV . x , Ts) ;
54 [ IT5 , IT05 , t]= CostruzioneSegnale ( s5 . IT . y , s5 . IT . x , Ts) ;
55 [ IH5 , IH05 , t]= CostruzioneSegnale ( s5 . IH . y , s5 . IH . x , Ts) ;
56 [ IPLA5 , IPLA05 , t]= CostruzioneSegnale ( s5 . IP . y , s5 . IP . x , Ts) ;
57
58 [DEP6,DEP06, t]= CostruzioneSegnale ( s6 .DEP. y , s6 .DEP. x , Ts) ;
59 [ IF6 , IF06 , t]= CostruzioneSegnale ( s6 . IF . y , s6 . IF . x , Ts) ;
60 [ IV6 , IV06 , t]= CostruzioneSegnale ( s6 . IV . y , s6 . IV . x , Ts) ;
61 [ IT6 , IT06 , t]= CostruzioneSegnale ( s6 . IT . y , s6 . IT . x , Ts) ;
62 [ IH6 , IH06 , t]= CostruzioneSegnale ( s6 . IH . y , s6 . IH . x , Ts) ;
63 [ IPLA6 , IPLA06 , t]= CostruzioneSegnale ( s6 . IP . y , s6 . IP . x , Ts) ;
64
65 [DEP7,DEP07, t]= CostruzioneSegnale ( s7 .DEP. y , s7 .DEP. x , Ts) ;
66 [ IF7 , IF07 , t]= CostruzioneSegnale ( s7 . IF . y , s7 . IF . x , Ts) ;
67 [ IV7 , IV07 , t]= CostruzioneSegnale ( s7 . IV . y , s7 . IV . x , Ts) ;
68 [ IT7 , IT07 , t]= CostruzioneSegnale ( s7 . IT . y , s7 . IT . x , Ts) ;
69 [ IH7 , IH07 , t]= CostruzioneSegnale ( s7 . IH . y , s7 . IH . x , Ts) ;
70 [ IPLA7 , IPLA07 , t]= CostruzioneSegnale ( s7 . IP . y , s7 . IP . x , Ts) ;
71
72 [DEP8,DEP08, t]= CostruzioneSegnale ( s8 .DEP. y , s8 .DEP. x , Ts) ;
73 [ IF8 , IF08 , t]= CostruzioneSegnale ( s8 . IF . y , s8 . IF . x , Ts) ;
74 [ IV8 , IV08 , t]= CostruzioneSegnale ( s8 . IV . y , s8 . IV . x , Ts) ;
75 [ IT8 , IT08 , t]= CostruzioneSegnale ( s8 . IT . y , s8 . IT . x , Ts) ;
76 [ IH8 , IH08 , t]= CostruzioneSegnale ( s8 . IH . y , s8 . IH . x , Ts) ;
77 [ IPLA8 , IPLA08 , t]= CostruzioneSegnale ( s8 . IP . y , s8 . IP . x , Ts) ;
78 %% Definizione i n g r e s s i e uscite del sistema
79
80 Ti =0.3;
81 Tf =1.2;
82 tFT=Ti : Ts : Tf ;
83
84 u1=[IV1 ; IF1 ; IT1 ; IH1 ; IPLA1 ] ;
85 y1=DEP1;
86 u2=[IV2 ; IF2 ; IT2 ; IH2 ; IPLA2 ] ;
87 y2=DEP2;
88 u3=[IV3 ; IF3 ; IT3 ; IH3 ; IPLA3 ] ;
89 y3=DEP3;
90 u4=[IV4 ; IF4 ; IT4 ; IH4 ; IPLA4 ] ;
91 y4=DEP4;
92 u5=[IV5 ; IF5 ; IT5 ; IH5 ; IPLA5 ] ;
93 y5=DEP5;
94 u6=[IV6 ; IF6 ; IT6 ; IH6 ; IPLA6 ] ;
95 y6=DEP6;
96 u7=[IV7 ; IF7 ; IT7 ; IH7 ; IPLA7 ] ;
97 y7=DEP7;
98 u8=[IV8 ; IF8 ; IT8 ; IH8 ; IPLA8 ] ;
99 y8=DEP8;
100
101 u1FT=u1 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
92
Cap. 4
Conclusioni e sviluppi futuri
102 y1FT=y1 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
103 u2FT=u2 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
104 y2FT=y2 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
105 u3FT=u3 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
106 y3FT=y3 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
107 u4FT=u4 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
108 y4FT=y4 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
109 u5FT=u5 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
110 y5FT=y5 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
111 u6FT=u6 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
112 y6FT=y6 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
113 u7FT=u7 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
114 y7FT=y7 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
115 u8FT=u8 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
116 y8FT=y8 ( : , f l o o r ( Ti/Ts) : f l o o r (Tf/Ts) ) ;
117
118 %% Id e nt if i ca zi o ne modello DEP
119
120 data=merge ( iddata (y1FT ' ,u1FT ' ,Ts , 'Domain ' , 'Time ' ) . . .
121
, iddata (y2FT ' ,u2FT ' ,Ts , 'Domain ' , 'Time ' ) . . .
122
, iddata (y3FT ' ,u3FT ' ,Ts , 'Domain ' , 'Time ' ) . . .
123
, iddata (y4FT ' ,u4FT ' ,Ts , 'Domain ' , 'Time ' ) ) ;
124 %data=merge ( iddata (y1FT ' ,u1FT ' ,Ts , 'Domain ' , 'Time ' ) ) ;
125 m=n4sid ( data ,20 , ' focus ' , ' Stability ' , ' MaxIter ' ,1000 , ' Tolerance ' ,1e −8) ;
126 ADEP=m.A;
127 BDEP=m.B;
128 CDEP=m.C;
129 DDEP=m.D;
130 [ yh , fit , x0]=compare (m, data ) ;
131 x0DEP=cell2mat (x0) ;
132 figure ( f i g )
133 f i g=f i g +1;
134 compare (m, data ) ;
Software per la manipolazione dei segnali scaricati dal database di FTU
1 function [ I , Ioffset_0 , t]= CostruzioneSegnale ( Iin , tin , Ts)
2
3
4 %trovo l ' indice relativo a l l ' istante 0
5 f o r i =1: length ( tin )
6
i f ( abs ( tin (1 , i ) )<1e − 4)
7
tin0=i ;
8
end
9 end
10
11 %vettore dei tempi usato n e l l ' i d e n t i f i c a z i o n e
12 t =0:Ts:2 − Ts ;
13 t_temp=0: tin (2)− tin (1) :2 − ( tin (2)− tin (1) ) ;
14
15 %%
93
Cap. 4
Conclusioni e sviluppi futuri
16
17 Itemp=zeros (1 , length (t_temp) ) ;
18
19
for j =1: length (t_temp)
20
Itemp (1 , j )=Iin (1 , tin0 −1+j ) ;
21
end
22
23 %% Ricampionamento dei segnali
24
25 I=zeros (1 , length ( t ) ) ;
26
27 I ( 1 , :)=interp1 (t_temp , Itemp , t ) ;
28
29
for j =1: length ( I )
30
i f ( isnan ( I (1 , j ) ) )
31
I (1 , j )=I (1 , j −1) ;
32
end
33
end
34 %% Faccio partire i segnali da zero
35
Ioffset_0 ( 1 ,: )=I ( 1 , :)− I (1 ,1) ;
94
Elenco delle gure
1.1 Illustrazione della reazione di fusione termonucleare . . . . . . . . . .
7
1.2 Foto dell'impianto FTU. A sinistra la camera da vuoto prima di essere
circondata dagli avvolgimenti elettrici. A destra l'impianto dall'esterno,
le apparecchiature visibili sono i sistemi di surriscaldamento addizionale
ad onde elettromagnetiche . . . . . . . . . . . . . . . . . . . . . . . .
10
1.3 Denizione della terminologia toroidale . . . . . . . . . . . . . . . . .
11
1.4 Linee di campo magnetico totale . . . . . . . . . . . . . . . . . . . . .
14
1.5 Schema delle correnti e dei campi generati in un Tokamak . . . . . .
15
2.1 Struttura esterna FTU e avvolgimenti. A sinistra, in giallo, sono
evidenziati i magneti preposti alla generazione del campo magnetico
~ tor , mentre a destra sono schematizzati gli altri avvolgimenti
toroidale B
preposti al controllo del plasma. . . . . . . . . . . . . . . . . . . . . .
19
2.2 Schema FTU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
2.3 Segnali FTU sparo n.31906 . . . . . . . . . . . . . . . . . . . . . . . .
28
2.4 Segnali ricampionati sparo n.31906 . . . . . . . . . . . . . . . . . . .
30
2.5 Schema del sistema da identicare . . . . . . . . . . . . . . . . . . . .
31
2.6 Segnali sparo n.31937 . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
2.7 Confronto tra le correnti stimate e le correnti reali, sparo 31937 . . .
33
95
ELENCO DELLE FIGURE
ELENCO DELLE FIGURE
2.8 Confronto tra le correnti stimate e le correnti reali, sparo 31851 . . .
34
2.9 Confronto tra le correnti stimate e le correnti reali, sparo 31944 . . .
34
2.10 Confronto tra le correnti stimate e le correnti reali, sparo 31851 . . .
35
2.11 Identicazione coil H sparo n◦ 31907 . . . . . . . . . . . . . . . . . .
36
2.12 Identicazione coil H sparo n◦ 31941 . . . . . . . . . . . . . . . . . .
37
2.13 Stima della corrente di plasma, sparo 31938 . . . . . . . . . . . . . .
38
2.14 Schema a blocchi dell'identicazione della corrente di plasma . . . . .
39
2.15 Mismatch IP LA − IˆP LA reale e stimato, sparo 31938 . . . . . . . . . .
39
2.16 Confronto tra la corrente di plasma stimata con e senza correzione del
mismatch, sparo 31938 . . . . . . . . . . . . . . . . . . . . . . . . . .
40
2.17 Confronto tra la corrente di plasma stimata con e senza correzione del
mismatch, sparo 31937 . . . . . . . . . . . . . . . . . . . . . . . . . .
40
2.18 Confronto tra la corrente di plasma stimata con e senza correzione del
mismatch, sparo 31909 . . . . . . . . . . . . . . . . . . . . . . . . . .
41
3.1 In alto è rappresentato lo schema di controllo senza anti-windup, in
basso è rappresentato lo schema di controllo con anti-windup
. . . .
45
3.2 Schema a blocchi dell'attuatore F . . . . . . . . . . . . . . . . . . . .
47
3.3 Schema elettrico semplicato del ponte a tiristori del convertitore AL-F 48
3.4 Schema di controllo con compensatore antiwindup . . . . . . . . . . .
50
3.5 Schema a ciclo chiuso con target model . . . . . . . . . . . . . . . . .
50
3.6 Ricostruzione del segnale ∆Ψ sparo 31626 . . . . . . . . . . . . . . .
54
3.7 Ricostruzione del segnale ∆Ψ con matrice K=0 . . . . . . . . . . . .
55
3.8 Schema di controllo a ciclo chiuso senza anti-windup . . . . . . . . .
56
3.9 Corrente di riferimento ed erogata dalla coil F, sparo 31626 . . . . . .
57
96
ELENCO DELLE FIGURE
ELENCO DELLE FIGURE
3.10 Simulazione dello schema di controllo a catena chiusa senza anti-windup,
sparo : 31626 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
3.11 Schema di controllo a ciclo con compensatore anti.windup . . . . . .
58
3.12 Simulazione dello schema di controllo a catena chiusa con anti-windup,
sparo : 31626 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
3.13 Simulazione del sistema di controllo a ciclo chiuso senza anti-windup,
sparo 31906 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
3.14 Simulazione del sistema di controllo a ciclo chiuso con compensatore
anti-windup attivo, sparo 31906 . . . . . . . . . . . . . . . . . . . . .
61
3.15 Confronto dei risultati ottenuti nelle due simulazioni, sparo 31906 . .
62
3.16 Simulazione del sistema di controllo a ciclo chiuso senza anti-windup,
sparo 31925 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
3.17 Simulazione del sistema di controllo a ciclo chiuso con compensatore
anti-windup attivo, sparo 31925 . . . . . . . . . . . . . . . . . . . . .
63
3.18 Simulazione del sistema di controllo a ciclo chiuso con compensatore
anti-windup attivo, sparo 31939 . . . . . . . . . . . . . . . . . . . . .
64
3.19 Simulazione del sistema di controllo a ciclo chiuso senza anti-windup,
sparo 32771 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
3.20 Simulazione del sistema di controllo a ciclo chiuso con compensatore
anti-windup attivo, sparo 32771 . . . . . . . . . . . . . . . . . . . . .
65
3.21 Confronto tra ∆Ψ e −I˙F per per gli spari 31626, 31628, 32775 . . . .
67
3.22 Ricostruzione del segnale ∆Ψ attraverso la mappa statica, spari 31626,
32771 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
3.23 Simulazione del sistema di controllo senza e con antiwindup, sparo 31909 70
3.24 Simulazione del sistema di controllo senza e con antiwindup, sparo 31933 71
97
ELENCO DELLE FIGURE
ELENCO DELLE FIGURE
3.25 Simulazione del sistema di controllo a ciclo chiuso senza antiwindup,
sparo 31626 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
72
3.26 Simulazione del sistema di controllo a ciclo chiuso con anti-windup,
sparo 31626 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
72
3.27 Simulazione del sistema di controllo a ciclo chiuso senza e con antiwindup, sparo 31629 . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
3.28 Simulazione del sistema di controllo a ciclo chiuso senza e con antiwindup, sparo 32771 . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
3.29 Simulazione del sistema di controllo a ciclo chiuso senza e con antiwindup, sparo 32776 . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
98
Bibliograa
[1] R.Vitelli, L. Boncagni, F. Mecocci, S. Podda, V. Vitale, L. Zaccarian
An anti-
windup-based solution for the low current nonlinearity compensation on the FTU
.
Horizontal position controller'
[2] S. De Maio
Modellazione dell'impianto di FTU e sintesi del controllore di tem-
peratura del limiter di litio liquido'
, Tesi di laurea specialistica in ingegneria
dell'automazione, Università degli studi di Roma Tor Vergata, 2010/2011.
[3] A. Di Geronimo
Implementazione su framework MARTe di tecniche di controllo
non lineare e controllo Real-Time del Plasma su impianto FTU'
, Tesi di laurea
specialistica in ingegneria dell'automazione, Università degli studi di Roma Tor
Vergata, 2010/2011.
99